Documente Academic
Documente Profesional
Documente Cultură
SNeconv RA
Încărcat de
Stefanitza Catalin NeamtuTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
SNeconv RA
Încărcat de
Stefanitza Catalin NeamtuDrepturi de autor:
Formate disponibile
========== Seria Control Engineering ==========
Constantin MARIN
SISTEME NECONVENIONALE
DE REGLARE AUTOMAT
PREFA
Prezenta lucrare este o continuare a crilor Structuri i legi de reglare
automat, i Ingineria reglrii automate-Elemente de analiz i sintez, publicate
de autor n Editura Universitaria 2000 i respectiv n Editura SITECH 2004.
Sunt prezentate i analizate o serie de sisteme de reglare automat, altele
dect cele convenionale, insistndu-se asupra nelegerii fenomenelor fizice i a
ncadrrii lor ntr-o form sistemic unitar de reprezentare matematic.
Prin sistem de reglare convenional SRC, sau bucl simpl de reglare
automat, se nelege un sistem de reglare pentru instalaii cu o singur mrime
de comand i o singur marime msurat la care singura informaie despre
ndeplinirea scopului conducerii o constituie eroarea sistemului.
Este recunoscut faptul c sistemele de reglare convenional sunt pe departe
cele mai des ntlnite n practic pentru procese simple dar totui ele nu
corespund unor procese i scopuri mai complicate.
In lucrare sunt prezentate trei categorii de sisteme neconvenionale de
reglare automat i anume:
1. Sisteme neconvenionale specifice care folosesc baza matematic a sistemelor
convenionale dar care au structuri diferite de cele ale unui sistem convenional.
n aceast categorie sunt analizate: Sistemele de reglare n cascad; Sistemele
de reglare combinat; Sistemele de reglare cu corecii n regim tranzitoriu;
nSistemele de reglare convergent, etc.
2. Sisteme cu numr finit de valori ale mrimilor de comand n care structura
este asemantoare cu cea de la sistemele convenionale dar pentru care
instrumentul matematic este diferit. n aceast categorie sunt analizate:
Sistemele bipoziionale i tripoziionale de reglare automat; Sistemele cu
modulare n fdurat i frecvena de impulsuri, etc.
3. Sisteme de reglare cu o teorie matematic proprie i structuri altele dect cele
convenionale. n acest categorie sunt analizate: Sistemele multivariabile;
Sistemele cu timp mort; Sistemele adaptive.
i n aceast lucrare se caut s se prezinte i utilizeze un cadru de noiuni
presupuse cunoscute de la disciplina de Teoria sistemelor i din chestiunile
prezentate la disciplina Ingineria Reglrii Automate ce face obiectul crilor
menionate mai sus.
Lucrarea este destinat studenilor de la Facultatea de Automatic,
Calculatoare i Electronic la disciplinele de Ingineria Reglrii Automate i
Teoria Reglrii Automate.
Poate fi utilizat de inginerii care doresc s proiecteze un sisteme de reglare
automat altele dect cele convenionale.
SISTEME NECONVENIONALE DE REGLARE AUTOMAT
CUPRINS
1. SISTEME NECONVENIONALE SPECIFICE DE REGLARE AUTOMAT
1.1. Sisteme convenionale i sisteme neconvenionale de reglare automat . . . . . . . 1
1.2. Sisteme de reglare n cascad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1. Definiia sistemelor de reglare n cascad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.2. Exemplu de sistem de reglare n cascad pentru temperatura ntr-o incint termic . 3
1.2.2.1. Sistemul convenional de reglare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2.3. Sistemul de reglare n cascad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.3. Exemplu de sistem de reglare n cascad pentru viteza de rotaie a unui motor de
curent continuu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.4. Calculul sistemelor de reglare n cascad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3. Sisteme de reglare combinat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.1. Definiia sistemelor de reglare combinat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.2. Sisteme de reglare combinat avnd corecia suplimentar aplicat la ieirea din
legea de reglare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3.3. Sisteme de reglare combinat avnd corecia suplimentar aplicat la intrarea n
legea de reglare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4. Sisteme de reglare convergent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.1. Definiia sistemelor de reglare convergent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.2. Sisteme de reglare convergent avnd corecia suplimentar aplicat la ieirea din
legea de reglare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.3. Sisteme de reglare convergent avnd corecia suplimentar aplicat la intrarea n
legea de reglare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5. Sisteme de reglare paralel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.1.Definiia sistemelor de reglare paralel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.2. Sistem de reglare paralel cu dou bucle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.3. Exemple de aplicare a sistemelor de reglare paralel . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.6. Sisteme de reglare cu corecie suplimentar n regim tranzitoriu . . . . . . . . . . . . . 16
1.7. Sisteme de reglare cu corecie a regimului tranzitoriu . . . . . . . . . . . . . . . . . . . . . . . 17
1.8. Sisteme de reglare cu structur variabil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.8.1. Definiia sistemelor cu strctur variabil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.8.2. Exemplu de sistem cu structur variabil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.8.3. Regimuri de evoluie n sistemele cu structur variabil . . . . . . . . . . . . . . . . . . . . . . . . 20
1.8.3.1. Regimul de comutare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1. SISTEME NECONVENIONALE Cuprins
DE REGLARE AUTOMAT
I
1.8.3.2. Exemplu de regim de comutare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.8.3.3. Regimul de alunecare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.8.4. Schema bloc general a unui sistem cu structur variabila . . . . . . . . . . . . . . . . . . . . . . 23
2. SISTEME CU NUMR FINIT DE VALORI PENTRU MRIMEA DE
COMAND 24
2.1. Introducere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2. Sisteme de reglare bipoziional cu caracteristic de tip histerezis . . . . . . . . . . 25
2.2.1. Elemente de comand bipoziional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2.1.1. Elemente bipoziionale fr histerezis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2.1.2. Elemente bipoziionale cu histerezis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2.2. Exemplu de sistem bipoziional pentru reglarea temperaturii . . . . . . . . . . . . . . . . . . . . 27
2.2.2.1. Schema de principiu a sistemului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2.2.2. Schema bloc general a sistemului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.2.3. Schema bloc echivalent a sistemului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.3. Analiza comportrii unui sistem de reglare bipoziional pentru un proces liniar de
ordinul nti cu timp mort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.3.1. Schema bloc i traiectorii posibile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.3.2. Analiza comportrii prin explicitarea traiectoriilor de evoluie . . . . . . . . . . . . . . . . . 34
2.2.3.3. Analiza comportrii prin reprezentarea traiectoriilor n spaiul strilor . . . . . . . . . . . 37
2.2.3.4. Analiza comportrii prin utilizarea funciilor de descriere. . . . . . . . . . . . . . . . . . . . . 37
2.3. Sisteme de reglare tripoziional cu caracteristic de tip histerezis . . . . . . . . . . . . 38
2.3.1. Elemente de comand tripoziional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.3.1.1. Elemente tripoziionale fr histerezis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.3.1.2. Elemente tripoziionale cu histerezis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.3.2. Exemplu de sistem tripoziional pentru reglarea temperaturii . . . . . . . . . . . . . . . . . . . . 41
2.3.2.1. Schema de principiu a sistemului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.3.2.2. Schema bloc general a sistemului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.3.2.3. Schema bloc echivalent a sistemului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.3.3. Analiza comportrii unui sistem de reglare tripoziional pentru un proces liniar cu
timp mort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.3.3.1. Schema bloc i traiectorii posibile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.3.3.2. Analiza comportrii prin explicitarea traiectoriilor de evoluie . . . . . . . . . . . . . . . . . 49
2.3.3.3. Analiza comportrii prin reprezentarea traiectoriilor n spaiul strilor . . . . . . . . . . . 52
2.4. Legi de reglare tripoziional cu elemente n reacie . . . . . . . . . . . . . . . . . . . . . . . . 54
1. SISTEME NECONVENIONALE Cuprins
DE REGLARE AUTOMAT
II
2.4.1. Lege de reglare tripoziional cu element dinamic n reacie . . . . . . . . . . . . . . . . . . . . 54
2.4.2. Lege de reglare tripoziional cu reacie dup mrimea de execuie . . . . . . . . . . . . . . 58
2.5. Realizarea cu amplificatoare operaionale a legilor bipoziionalei tripoziionale 60
2.5.1. Realizarea unei caracteristici bipoziional cu histerezis, descresctoare . . . . . . . . . . 60
2.5.2. Realizarea unei caracteristici bipoziional cu histerezis, cresctoare . . . . . . . . . . . . . 62
2.5.3. Modaliti de realizare a elementului de comparaie n sistemele de reglare cu
caracteristici bipoziionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.5.3. Modaliti de realizare a caracteristicilor tripoziionale . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.6. Sisteme cu modulare n durat de impulsuri (PWM) . . . . . . . . . . . . . . . . . . . . . . 66
2.6.1. Reprezentarea procesului de modulare n durat de impulsuri . . . . . . . . . . . . . . . . . . 66
2.6.2. Exemplu de sistem de reglare cu element de comand de tip PWM . . . . . . . . . . . . 68
2.6.3. Reprezentarea echivalent a procesului PWM prin mediere n timp . . . . . . . . . . . . . 71
2.7. Sisteme cu modulare n frecven de impulsuri (PFM) . . . . . . . . . . . . . . . . . . . . . 74
2.7.1. Reprezentarea procesului de modulare n frecven de impulsuri . . . . . . . . . . . . . . . 74
2.7.2. Exemplu de sistem de reglare cu element de comand de tip PFM . . . . . . . . . . . . . 76
3. SISTEME MULTIVARIABILE DE REGLARE AUTOMAT . . . . . . . . . . . . . 79
3.1. Structuri de reglare automat multivariabil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.1.1. Exemplu de sistem multivariabil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.1.2. Structur de reglare multivariabil nedecuplat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.1.3. Structur de reglare multivariabil decuplat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3.1.4. Reglarea combinat n sistemele multivariabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.1.5. Sistem automat multivariabil cu bloc de reglare n reacie . . . . . . . . . . . . . . . . . . . . . 84
3.2. Calculul sistemelor multivariabile de reglare automat . . . . . . . . . . . . . . . . . . . . 85
3.2.1. Algoritmul Truxall de sintez a sistemelor de reglare multivariabil decuplat . . . . 85
3.2.2. Exemplu de calcul n structur nedecuplat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.2.3. Varianta Kessler a criteriului modulului pentru sisteme multivariabile . . . . . . . . . . . 89
3.2.4. Exemplu de aplicare a Variantei Kessler pentru sisteme multivariabile . . . . . . . . . . 91
3.2.5. Acordarea regulatoarelor tipizate ntr-un sistem multivariabil cu dou intrri i
dou ieiri n structur nedecuplat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4. SISTEME DE REGLARE CU TIMP MORT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94 .
4.1. Caracteristici generale ale sistemelor cu timp mort . . . . . . . . . . . . . . . . . . . . . . . . 94
4.1.1. Definiia sistemelor cu timp mort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94 .
4.1.2. Exemplu: Instalaie de nclzire cu band transportoare . . . . . . . . . . . . . . . . . . . . . . 94 .
4.1.3. Exemplu: Instalaie de laminare (caja de laminare) . . . . . . . . . . . . . . . . . . . . . . . . . . . 96 .
1. SISTEME NECONVENIONALE Cuprins
DE REGLARE AUTOMAT
III
4.1.4. Modelul matematic al elementului de ntrziere pur (EIP) . . . . . . . . . . . . . . . . . . . . 97 .
4.1.4.1. Relaii de reprezentare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97 .
4.1.4.2. Aproximarea expresiei exp(-tau*s) printr-o raional . . . . . . . . . . . . . . . . . . . . . . . . 98 .
4.1.5. Comportarea echivalent intrare-ieire a unui sistem cu timp mort . . . . . . . . . . . . . 100
4.1.6. Aproximarea comportrii unui sistem de ordin ridicat printr-un model de ordinul
nti cu timp mort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.1.7. Caracteristici de frecven ale sistemelor cu timp mort . . . . . . . . . . . . . . . . . . . . . . . . 102
4.2. Sisteme cu timp mort n circuit nchis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.2.1. Funcii de transfer n circuit nchis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.2.2. Sistem n circuit nchis cu elemente nedinamice i un element de ntrziere pur . . 107
4.2.3. Sistem n circuit nchis cu partea fix de ordinul nti cu timp mort i regulator P . . 112
4.2.4. Analiza n domeniul frecven a stabilitii sistemelor cu timp mort n circuit nchis 114
4.2.5. Analiza stabilitii sistemului n circuit nchis folosind criteriul Nyquist de
stabilitate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
4.2.6. Concluzii privind comportarea sistemelor cu timp mort n circuit nchis . . . . . . . . . . 119
4.3. Sinteza sistemelor de reglare cu timp mort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.3.1. Sinteza sistemelor de reglare cu timp mort prin utilizarea unor modele liniare de
ordin finit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.3.1.1. Formularea problemei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.3.1.2. Exemple de aproximri prin modele de ordin finit . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.3.2. Sinteza sistemelor de reglare cu timp mort prin identificarea coeficienilor
dezvoltrilor n serie a funciilor de transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
4.3.2.1. Formularea problemei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
4.3.2.2. Exemple de funcii de transfer model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
4.3.2.3. Structuri echivalente n circuit nchis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
4.3.3. Relaii de acordare a unui regulator PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
4.3.4. Relaii de acordare a unui regulator PI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
4.4. Sisteme de reglare cu predictor Smith . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
4.4.1. Formularea problemei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
4.4.2. Structuri echivalente n circuit nchis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
4.4.3. Forme de implementare a legii de reglare de tip predictor Smith . . . . . . . . . . . . . . . . 140
5. SISTEME ADAPTIVE DE REGLARE AUTOMAT . . . . . . . . . . . . . . . . . . . . . 142
5.1. Structuri de reglare adaptiv . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.1.1. Introducere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
1. SISTEME NECONVENIONALE Cuprins
DE REGLARE AUTOMAT
IV
5.1.1.1. Structura general a sistemelor adaptive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.1.1.2. Clasificarea sistemelor adaptive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.1.2. Sisteme adaptive cu parametri programabili (gain scheduling) . . . . . . . . . . . . . . . . . . 144
5.1.2.1. Structura sistemelor adaptive cu parametri programabili . . . . . . . . . . . . . . . . . . . . . 144
5.1.2.2. Structur adaptiv cu compensarea parametrilor n raport cu o perturbaie . . . . . 145
5.1.2.3. Exemplu: Structur adaptiv cu compensarea parametrilor n raport cu o
perturbaie la o instalaie termic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
5.1.2.4.Structur adaptiv cu compensarea parametrilor n raport cu mrimeade comand 147
5.1.3. Structur de reglare adaptiv cu model de referin . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
5.1.4. Structur de reglare adaptiv cu regulatoare autoacordabile . . . . . . . . . . . . . . . . . . . 150
5.2. Sisteme adaptive de cu model de referin (SAMR) . . . . . . . . . . . . . . . . . . . . . . . 151
5.2.1. Tipuri de configuraii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
5.2.1.1. Formularea problemei de adaptare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
5.2.1.2. Sisteme adaptive de cu model de referin (SAMR) n configuraie paralel . . . . 152
5.2.1.3. Sisteme adaptive de cu model de referin (SAMR) n configuraie serie . . . . . . . 152
5.2.1.4. Sisteme adaptive de cu model de referin (SAMR) n configuraie serie-paralel . 153
5.2.2. Mecanisme de ajustare (MAj) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
5.2.2.1. Formularea matematic a problemei de adaptare . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
5.2.2.2. Structura mecanismului de ajustare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
5.2.2.3. Metode de rezolvare a problemelor de sintez optim . . . . . . . . . . . . . . . . . . . . . . 157
5.2.2.4. Metoda funciilor de senzitivitate pentru realizarea adaptrii . . . . . . . . . . . . . . . . . 159
5.2.2.5. Exemplu de structur adaptiv cu model etalon de ordinul nti . . . . . . . . . . . . . . . 160
5.2.2.6. M etoda funciilor Liapunov pentru realizarea adaptrii . . . . . . . . . . . . . . . . . . . . . 162
5.2.2.7. Metoda hiperstabilitii pentru realizarea adaptrii . . . . . . . . . . . . . . . . . . . . . . . . . . 165
5.3. Sisteme adaptive de reglare cu regulatoare autoacordabile . . . . . . . . . . . . . . . . . 166
5.3.1. Structuri de autoacordare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
5.3.2. Algoritme de de autoacordare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
5.4. Exemple de sisteme adaptive de reglare automat . . . . . . . . . . . . . . . . . . . . . . . . . 169
5.4.1. Sistem adaptiv de reglare cu adaptare extern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
5.4.1.1. Formularea problemei de adaptare extern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
5.4.1.2. Caracteristici statistice ale unor semnale ntmpltoare . . . . . . . . . . . . . . . . . . . . . . 171
5.4.1.3. Algoritmul de adaptare extern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
5.4.2. Sistem adaptiv cu controlul caracteristicii de frecven . . . . . . . . . . . . . . . . . . . . . . . . 175
5.4.3. Sistem adaptiv cu semnal de prob zgomot alb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
1. SISTEME NECONVENIONALE Cuprins
DE REGLARE AUTOMAT
V
1. SISTEME NECONVENIONALE SPECIFICE DE REGLARE
AUTOMAT
1.1. Sisteme convenionale i sisteme neconvenionale de reglare
automat
Prin sistem de reglare convenional SRC, sau bucl simpl de reglare
automat, se nelege un sistem de reglare pentru instalaii cu o singur mrime
de comand i o singur marime msurat la care singura informaie despre
ndeplinirea scopului conducerii o constituie eroarea sistemului.
Aceast informaie nseamn att valoarea erorii ct i eventual atribute ale
sale ca i funcie n timp ca de exemplu derivate i integrale de diferite ordine
realizate prin legile de tip PID.
Sistemele de reglare convenional sunt pe departe cele mai des ntlnite n
practic pentru procese simple dar nu corespund unor procese i scopuri mai
complicate
O structur de reglare convenional este recomandat cnd:
1. Instalaia tehnologic poate fi controlat convenabil printr-o singur mrime.
2. Se poate msura i converti n semnal unificat numai mrimea msurat.
3. Comportarea dinamic a prii fixe poate fi descris suficient de exact printr-un
model liniar invariabil n timp.
4. Exigenele privind calitatea regimului tranzitoriu nu sunt prea severe.
5. Nu exist o anumit perturbaie dominant.
6. Importana ecoomic a proesului condus nu justific structuri mai complexe.
Dei orice sistem care nu corespunde definiiei de sistem convenional
poate fi considerat sistem neconvenionale de reglare automat, totui sub aceast
definiie se gsesc sistemele, diferite de sistemele convenionale, care nu au o
denumire proprie.
Sistemele de reglare multivariabile, sistemele de reglare cu timp mort,
sistemele stochastice, sistemele adaptive, sistemele cu legi de reglare n logic
fuzzy, sistemele de reglare adaptive, etc., sunt sisteme neconvenionale dar sunt
cunoscute prin denumirile lor deoarece presupun o abordare teoretic specific.
Acelai lucru se poate spune despre sistemele la care mrimea de comand
poate lua numai un numr finit de valori (sisteme bipoziionale, sisteme
tripoziionele, etc.) care, ca i structur, sunt sisteme convenionele, dar prin
metodele lor specifice de analiz i sintez sunt ncadrate ca i siteme neliniare de
reglare automat. De obicei prin sistem neconvenional se nelege un sistem ce
poate fi tratat cu acelai aparat matematic dar care are o structur specific.
Sistemele din acest capitol se denumite specifice, ncadreaz n aceast categorie.
1. SISTEME NECONVENIONALE 1.1. Sisteme convenionale i
SPECIFICE DE REGLARE AUTOMAT sisteme neconvenionale de reglare automat
1
1.2. Sisteme de reglare n cascad
1.2.1. Definiia sistemelor de reglare n cascad
Prin sistem de reglare n cascad se nelege un sistem la care se regleaz
prin bucle concentrice o serie de mrimi intermediare care rspund mai repede la
perturbaii dect mrimea de ieire final ce trebuie controlat.
Prin aceste bucle concentrice se previne ntr-o mare msur aciunea
perturbaiilor asupra mrimii de ieire.
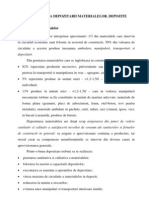
Structura unui sistem de reglare n cascad cu dou bucle este prezentat n
Fig.1.2.1. Ea se poate extinde pentru un numr oarecare de bucle, n funcie de
numrul de mrimi intermediare ale procesului condus necesare unui scop.
y
R2
2
r
1
r
p (t)
2
p (t)
1
y
R1
H (s)
Tr2
H (s)
Tr1
H (s)
2
H (s)
1
H (s)
R2
H (s)
R1
+ + +
+ +
+
v y
2
2
v v
1
y
p2
y
p1
y
1
F
u
Bucla intern
Bucla principal (extern)
Regulator
principal
Regulator
intern
1
2
H (s)
Fp1
~
H (s)
Fp2
~
Figura nr.1.2.1.
Mrimea de ieire este iar este o mrime intermediar. Fiecare este y
1
y
2
prevzut cu traductoare corespunztoare. Elementul de execuie i instalaia
tehnologic sunt exprimate ca o conexiune serie de dou elemente, i H
1
(s) H
2
(s)
ntre care intervin i diferitele perturbaii.Regulatorul principal are funcia de
transfer iar cel intern . H
R1
(s) H
R2
(s)
ntr-un sistem de reglare n cascad, mrimea de comand dintr-o bucl
este mrime prescris pentru bucla imediat interioar.
Bucla extern se numete i bucl principal iar regulatorul din aceast
bucl se numete regulator principal.
Regulatorul principal are rolul decisiv n asigurarea erorii staionare de
poziie nul, i de aceea trebuie s conin o component de tip integrator.
Chiar dac sistemul global este unul de stabilizare automat, buclele
interne se comport ca i sisteme de urmrire. Ele trebuie s menin mrimea
intermediar, creia i este ataat, la o valoare dictat de bucla imediat
exterioar, valoare care depinde de valorile perturbaiilor. Structurile de reglare
n cascad sunt foarte utilizate n practica industrial. n mod frecvent, pentru
reglrile de vitez de rotaie la mainile electrice, indiferent de tip, se folosesc
structuri n cascad avnd curenii motrici ca i mrimi intermediare.
1. SISTEME NECONVENIONALE 1.. Sisteme de reglare n cascad
SPECIFICE DE REGLARE AUTOMAT
2
1.2.2. Exemplu de sistem de reglare n cascad pentru temperatura
ntr-o incint termic
1.2.2.1. Sistemul convenional de reglare
Se consider o incint termic la care trebuie reglat temperatura prin
modificarea poziiei a cursorului unui transformator reglabil care este alimentat
n primar cu o tensiune electrica a crei valoare eficace este . Schema de U
(t)
principiu (schema de automatizare) este prezentat n Fig.1.2.2.
y
R1
i(t)
R
~
Surs
de
energie
u(t)
TT
TC
Incint termic
U
~
Figura nr.1.2.2.
Se observ c apare o mrime intermediar, curentul prin rezistena de i
nclzire. Prin s-a notat valoarea prescris a temperaturii .
Schema bloc ataat acestei scheme de principiu este desenat n Fig.1.2.3.
n care sunt marcate i funciile de transfer ale celor cinci elemente componente.
Tensiunea eficace are rolul celei de adoua perturbaii U
(t) p
2
(t) U
(t)
k
p (t)
y
R1
i(t)
H (s)
IT1
H (s)
Tr1
H (s)
IT2
H (s)
EE
H (s)
R1
+
y=
v
(t)
Trad Temp
IT2 EE R1 IT1
Bucl de temperatur
r
r
u
F
ParteaFix
k=1, 3,...q
p (t)
2
U
~
Figura nr.1.2.3.
Un astfel de sistem de reglare permite compensarea efectului perturbaiilor
numai dup ce mrimea reglat se modific.
Totui se observ c la modificarea mrimii , nti se modific valoarea U
curentului i apoi temperatura . n regim staionar, curentul i are o valoare i
care asigur temperatura dorit .Valoarea depinde de restul I I
perturbiilor , care acioneaz asupra instalaiei. p
k
(t) , k 1, 3, ...q
1. SISTEME NECONVENIONALE 1.. Sisteme de reglare n cascad
SPECIFICE DE REGLARE AUTOMAT
3
1.2.2.3. Sistemul de reglare n cascad
Dac mrimea prescris se modific n timp , atunci n
(t)
regimul permanent corespunztor ce asigur i valoarea dorit a (t)
(t)
curentului, , se modific n timp, . i
(t)
Ori cum, dac legea de reglare R1 are caracter integrator, n regim
staionar, dac exist un regim staionar corect setat, se asigur , deci se se
compenseaz efectul tuturor perturbaiilor, inclusiv cel al tensiunii . U
Se poate elimina n regim traanzitoriu, efectul perturbaiei
asupra mrimii de ieire , dac se msoar valoarea curentului U
(t) p
2
(t)
i se controleaz n funcie de aceasta mrimea de comand astfel nct s i(t)
se menin valoarea , valoare ns determinat n funcie de eroarea i
(t)
(t)
(t) (t)
Aceast idee se materializeaz prin schema de principiu din Fig.1.2.4. creia i
corespunde schema bloc din Fig.1.2.5., adic un sistem de reglare n cascad.
y
R2
y
R1
i(t) R
H (s)
IT1
H (s)
R2
H (s)
R1
~
Surs
de
energie
u(t)
T T
I T
I C
T C
Incint termic
I
I*
p (t)
2
U
~
Figura nr.1.2.4.
y
R2
2
r
2
r
1
r
1
r
y
R1
i(t)
H (s)
IT1
H (s)
Tr1
H (s)
Tr2
H (s)
I T2
H (s)
EE
H (s)
R1
H (s)
R2
I*
+
+
v
(t)
y =
1
y
2
y
2
y
1
F
u
EE
y
Trad Temp
Trad Curent
IT2 EE R1 R2 IT1
Bucla de curent
Bucla de temperatur
Bucla principal
Regulator
principal
1
2
p (t)
2
U
~
k
p (t) k=1, 3,.q
Figura nr.1.2.5.
1. SISTEME NECONVENIONALE 1.. Sisteme de reglare n cascad
SPECIFICE DE REGLARE AUTOMAT
4
1.2.3. Exemplu de sistem de reglare n cascad pentru viteza de
rotaie a unui motor de curent continuu
Este bine cunoscut schema bloc a unui motor de curent continuu cu
excitaie separat, reprezentat n Fig.1.2.6.
Factorii de proporionalitate depind de tensiunea de excitaie . K
m
, K
e
u
ex
Principala perturbaie o constituie cuplul reziatent . c
r
(t)
= ( ) u
ex
K
e
K
e
K
e
Ls+R
1
Js+K
1
v
c (t)
r
C (s)
r
C (s)
a
c (t)
a
u(t)
U(s)
(t)
(s)
-
+
+
- i(t)
K
m
K
m
K
m u
ex
= ( )
I(s)
Figura nr.1.2.6.
Pentru a realiza un sistem de reglare n cascad la care mrimea
intermediar este curentul rotoric , se transform schema bloc de mai sus i(t)
ntr-o schem echivalent care s evidenieze acest curent ca i mrime
intermediar.
Se obine schema bloc echivalent a motorului de curent continuu n care
(1.2.1) G
1
(s)
J s + K
v
(L J) s
2
+ (R J + L K
v
) s + K
m
K
e
R K
v
(1.2.2) G
2
(s)
K
e
(L J) s
2
+ (R J + L K
v
) s + K
m
K
e
R K
v
i structura de reglare n cascad din Fig.1.2.7.
Js+K
1
v
c (t)
r
c (t)
r
c (t)
r
C (s)
r
C (s)
r
C (s)
r
C (s)
a
c (t)
a
u(t)
U(s)
(t)
(s)
+
+
+
-
i(t)
K
m
G (s)
2
G (s)
1
I(s)
Schema bloc echivalent
a motorului de curent continuu
H (s)
Tr2
H (s)
Tr1
y
R2
2
r
1
r
y
R1
H (s)
R2
H (s)
R1
+
+
v
Bucla intern
Bucla principal
Bucla extern
Regulator
principal
Regulator
i nt ern
1
2
Traductor de curent
Bucla de curent
Traductor de turaie
Bucla de turaie
Figura nr.1.2.7.
1. SISTEME NECONVENIONALE 1.. Sisteme de reglare n cascad
SPECIFICE DE REGLARE AUTOMAT
5
1.2.4. Calculul sistemelor de reglare n cascad
Buclele interioare, ca i sisteme de urmrire, trebuie s asigure performane
att n raport cu referina lor (comanda din bucla imediat exterioar) ct i n
raport cu perturbaiile care acioneaz asupra instalaiei pn la mrimea
intermediar pe care o controleaz.
Calculul de sintez al unui sistem de reglare n cascad se efectueaz din
interior ctre exterior. O bucl interioar apare ca i component a prii fixe
pentru bucla imediat exterioar.
Faptul c aceast component este un sistem cu reacie, face s se atenueze
neliniaritile i evident efectul perturbaiilor aferente acelei bucle.
n sistemele de reglare n cascad nu se pot ignora traductoarele deoarece
apar reacii dup mrimi diferite ca natur.
Pentru a ncadra calculul n structurile convenionale n care apar reacii
directe, fiecare bucl este echivalat printr-o bucl cu reacie direct avnd la ieire
un element cu funcia de transfer egal cu inversul funciei de transfer a
traductorului din acea bucl. Considerm structura n cascad cu dou bucle
din Fig.1.2.1. n care se noteaz pentru simplitatea scrierilor ulterioare,
, . (1.2.3) Y
p1
(s) H
Fp1
(s) P
1
(s) Y
p2
(s) H
Fp2
(s) P
2
(s)
Extensiile la structurile cu mai multe bucle se pot face dup aceleai proceduri.
Mrimea de ieire din bucla interioar, care este mrimea intermediar , y
2
i care este o mrime fizic specific fiecrui proces, depinde de i , v
2
p
2
(1.2.4) Y
2
(s) H
v2
y2
(s) V
2
(s) + H
p2
y2
(s) P
2
(s)
(1.2.5) H
v2
y2
(s)
H
R2
(s) H
2
(s)
1+ H
R2
(s) H
2
(s) H
Tr2
(s)
. (1.2.6) H
p2
y2
(s)
H
Fp2
(s)
1+ H
R2
(s) H
2
(s) H
Tr2
(s)
Se exprim mrimea , n funcie de mrimea de reacie care este y
2
r
2
ieirea din traductorul acestei bucle,
. (1.2.7) Y
2
(s)
1
H
Tr2
(s)
R
2
(s)
Se interpreteaz marimea de reacie ca fiind ieirea unui sistem de r
2
reglare cu reacie direct, corespunztor structurii standard utilizat n procedurile
de proiectare,
unde (1.2.8) R
2
(s) H
v2
(s) V
2
(s) + H
p2
(s) P
2
(s)
(1.2.9) H
v2
(s)
H
R2
(s) H
2
(s) H
Tr2
(s)
1+ H
R2
(s) H
2
(s) H
Tr2
(s)
H
R2
(s) H
F2
(s)
1 + H
R2
(s) H
F2
(s)
H
2
d
(s)
1+ H
2
d
(s)
1. SISTEME NECONVENIONALE 1.. Sisteme de reglare n cascad
SPECIFICE DE REGLARE AUTOMAT
6
(1.2.10) H
p2
(s)
H
Fp2
(s) H
Tr2
(s)
1+ H
R2
(s) H
2
(s) H
Tr2
(s)
H
Fp2
(s)
1 + H
R2
(s) H
F2
(s)
H
Fp2
(s)
1+ H
2
d
(s)
, (1.2.11) H
F2
(s) H
2
(s) H
Tr2
(s)
, (1.2.12) H
Fp2
(s) H
Fp2
(s) H
Tr2
(s)
. (1.2.13) H
2
d
(s) H
R2
(s) H
F2
(s)
crora le corespund schemele bloc din Fig.1.2.8. i Fig.1.2.9.
y
R2
2
r
2
v
F2
u
2
r
1
r
1
r
y
R1
H (s)
Tr2
H (s)
Tr2
H (s)
Tr1
H (s)
2
H (s)
2
H (s)
R2
H (s)
R1
H (s)
F2
H (s)
Fp2
H (s)
v2
H (s)
p2
+ + +
+ +
+
v y
2
y
2
y
p2
y
p1
y
1
1
2
1
Figura nr.1.2.8.
2
v
2
r
1
r
1
r
y
R1
H (s)
Tr1
H (s)
2
H (s)
R1
H (s)
v2
H (s)
p2
+ + +
+
+
v y
2
y
p1
y
1
1
H (s)
Tr2
1
p (t)
2
Figura nr.1.2.9.
Folosind tehnicile de la sistemele convenionale cu reacie direct, se
determin, legea de reglare astfel nct s se asigure o H
R2
(s) H
R2
(s)
comportare dorit pentru mrimea de reacie deci i pentru . Cu legea r
2
y
2
, relaia (1.2.8) devine H
R2
(s)
(1.2.14) R
2
(s) H
v2
(s) V
2
(s) + H
p2
(s) P
2
(s)
asfel c rmne de calculat legea de reglare principal n structura din Fig.1.2.10.
H (s)
Fp1
~
2
r
1
r
1
r
y
R1
H (s)
Tr1
H (s)
R1
+ + +
+ +
v y
2
y
1
1
H (s)
Tr2
H (s)
2
p (t)
2
p (t)
1
H (s)
v2
^
H (s)
p2
^
Figura nr.1.2.10.
1. SISTEME NECONVENIONALE 1.. Sisteme de reglare n cascad
SPECIFICE DE REGLARE AUTOMAT
7
1.3. Sisteme de reglare combinat
1.3.1. Definiia sistemelor de reglare combinat
Sunt sisteme n care se mbin principiul aciunii prin discordan cu
princpiul compensaiei.
Conform principiului aciunii prin discordan, nti mrimea reglat se
abate de la valoarea prescris, nu are importan ce perturbaie a produs abaterea,
i apoi se reacioneaz pentru compensarea acestei abateri.
Aciunea prin discordan este materializat prin existena circuitului de
reacie. Are avantajul compensrii efectului oricror perturbaii i dezavantajul c
exist abateri nenule.
Principiul compensaiei presupune msurarea anumitor perturbaii i
aplicarea unor corecii suplimentare, astfel nct s se compenseze pe aceast cale
efectul prturbaiilor respective transmis pe cale natural.
Coreciile se pot aplica la ieirea din legea de reglare ca un semnal de bias
sau la intrarea n legea de reglare ca un semnal de offset.
Aciunea prin compensare are avantajul c se pot realiza regimuri
tranzitorii cu abateri nule i dezavantajul c permite compensarea numai pentru
anumite perturbaii.
mbinarea celor dou principii conduce la avantaje deosebite n special
cnd exist perturbaii dominante ce pot fi msurate.
1. SISTEME NECONVENIONALE 1.3. Sisteme de reglare combinat
SPECIFICE DE REGLARE AUTOMAT
8
1.3.2. Sisteme de reglare combinat avnd corecia suplimentar
aplicat la ieirea din legea de reglare
Un sistem de reglare combinat avnd coreciile suplimentare aplicate la la
ieirea din legea de reglarei decila intrarea elementului de execuie, n funcie
numai de valoarea perturbaiei , este prezentat n Fig.1.3.1. p
k
H (s)
Rpk
v
+
u
F
y
R
y
pk
y
pk
H (s)
R
H (s)
Trpk
H (s)
Fpk
H (s)
Fpi
F (s)
p k
H (s)
F
+ +
+ + +
p (t)
k
p (t)
i
y
y
y
uF
i=1:q, i k
y
R
bias
Traductor pentru
perturbaie
Element de
corecdie
al regulatorului
Semnalul de bias
bias
bias
Figura nr.1.3.1.
Corecia suplimentar se realizeaz prin semnalul
(1.3.1) Y
R
bias
(s) F
pk
bias
(s) P
k
(s)
unde este filtrul de corecie F
pk
(s)
(1.3.2) F
pk
bias
(s) H
Rpk
bias
(s) H
Trpk
(s)
n care este funcia de transfer a elementului de corecie iar este H
Rpk
bias
(s) H
Trpk
(s)
funcia de transfer a traductorului prin care se msoar perturbaia . p
k
Rspunsul forat al sistemului n circuit nchis, prevzut cu aceast corecie
suplimentar este
(1.3.3)
Y(s) Y
v
(s) + Y
pk
(s) +
i1, ik
q
Y
pi
(s)
unde ; (1.3.4) Y
v
(s) H
v
(s) V(s) Y
pi
(s) H
pi
(s) P
i
(s) , i 1 : q , i k
(1.3.5) Y
pk
(s) [
H
Fpk
(s)
1+ H
R
(s) H
F
(s)
+
F
pk
bias
(s) H
F
(s)
1 +H
R
(s) H
F
(s)
] P
k
(s)
Componenta a mrimii de ieire, provocat de variaia perturbaiei y
pk
(t)
, este nul dac p
k
(t)
(1.3.6) F
pk
bias
(s)
H
Fpk
(s)
H
F
(s)
i rezult (1.3.7)
H
Rpk
bias
(s)
1
H
Trpk
(s)
H
Fpk
(s)
H
F
(s)
Se observ c n aceast structur, filtrul de corecie nu depinde de legea de
reglare fiind acelai n circuit deschis i nchis.
1. SISTEME NECONVENIONALE 1.3. Sisteme de reglare combinat
SPECIFICE DE REGLARE AUTOMAT
9
1.3.3. Sisteme de reglare combinat avnd corecia suplimentar
aplicat la intrarea n legea de reglare
Un sistem de reglare combinat avnd coreciile suplimentare aplicate la la
intrare n legea de reglare, n funcie numai de valoarea perturbaiei , este p
k
prezentat n Fig.1.3.2.
y
R
v
+ u
F
y
pk y
ik
H (s)
R
H (s)
Rpk
H (s)
Trpk
H (s)
Fpk
H (s)
Fpi
F (s)
pk
H (s)
F
+
+ +
+ +
p (t)
k
p (t)
i
y
y
uF
i=1:q, i k
y
R
off
Traductor pentru
perturbaie
Element de
corecdie
al regulatorului
Semnalul de offset
R
u v
off
off
Figura nr.1.3.2.
Corecia suplimentar se realizeaz prin semnalul
(1.3.8) Y
R
off
(s) F
pk
off
(s) P
k
(s)
unde este filtrul de corecie de tio offset F
pk
off
(s)
(1.3.9) F
pk
off
(s) H
Rpk
off
(s) H
Trpk
(s)
n care este funcia de transfer a elementului de corecie iar este H
Rpk
off
(s) H
Trpk
(s)
funcia de transfer a traductorului prin care se msoar perturbaia . p
k
Rspunsul forat al sistemului n circuit nchis, prevzut cu aceast corecie
suplimentar este (1.3.3), n care sunt valabile relaiile (1.3.4) ns
(1.3.10) Y
pk
(s) [
H
pk
(s)
1+ H
R
(s) H
F
(s)
+
F
pk
off
(s) H
R
(s) H
F
(s)
1+ H
R
(s) H
F
(s)
] P
k
(s)
Componenta a mrimii de ieire, provocat de variaia perturbaiei y
pk
(t)
, este nul dac p
k
(t)
(1.3.11) F
pk
off
(s)
H
Fpk
(s)
H
R
(s) H
F
(s)
de unde rezult
(1.3.12) F
pk
off
(s)
H
Fpk
(s)
H
R
(s) H
F
(s)
Se observ c n aceast structur, filtrul de corecie depinde de legea de
reglare. Dac are caracter integrator atunci filtrul de corecie are H
R
(s) F
pk
off
(s)
caracter derivator astfel c n regim staionar nu se realizeaz nici-o corecie.
1. SISTEME NECONVENIONALE 1.3. Sisteme de reglare combinat
SPECIFICE DE REGLARE AUTOMAT
10
1.4. Sisteme de reglare convergent
1.4.1. Definiia sistemelor de reglare convergent
Reglarea convergent se aplic la procese cu o singur mrime de comand
i o singur mrime reglat la care sunt disponibile o serie de mrimi
intermediare, fiecare prevzute cu traductoare adecvate.
Sistemul este prevzut cu o bucl principal de reglare, avnd o lege de
reglare principal . H
R1
(s)
n reglarea convergent se aplic corecii suplimentare, dependente de
mrimile intermediare, concentrate ntr-un singur punct.
Coreciile sunt aplicate la ieirea din regulatorul principal sau la intrarea
acestuia, prin prelucrarea specific i individual a semnalelor de ieire din
traductoarele aferente mrimilor intermediare.
De multe ori pe circuitele de corecie se introduc, n amonte sau aval fa
de elementele dinmice liniare de corecie, o serie de neliniariti nedinamice.
Din punct de vedere al implementrilor fizice structura de reglare
convergent este asemntoare cu structura de reglare combinat numai c
intrrile n elementele de corecie sunt preluate de la marimi intermediare, ce
depind de comenzile aplicate. La reglarea combinat coreciile erau dependente
de perturbaiile msurate care sunt mrimi de intrare.
Structura de reglare convergent este o variant de sistem de reglare cu mai
multe bucle MLCS (Multy Loop Control System).
Se prezint n continuare dou astfel de structuri considernd numai o
singur mrime intermediar cu element neliniar de tip zona moart conectat n
amonte.
1.4.2. Sisteme de reglare convergent avnd corecia suplimentar
aplicat la ieirea din legea de reglare
Un exemplu de sistem cu o singur bucl de corecie este prezentat n
Fig.1.4.1. ce conine o neliniaritate de tip zon moart.
Dac mrimea intermediar este mai mic dect o valoare predefinit , Y
2
,atunci bucla de corecie suplimentar tinde s nu afecteze y
2
< Y
2
y
R2
(t) 0
comportarea sistemului de reglare principal care realizeaz anumite performane
niiale sau principale.
Peste aceast limit, , bucla suplimentar este activ y
2
> Y
2
y
R2
(t) 0
i se realizeaz alte performane.
Un astfel de sistem apare ca un sistem cu structur variabil i poate fi
1. SISTEME NECONVENIONALE 1.4. Sisteme de reglare convergent
SPECIFICE DE REGLARE AUTOMAT
11
ncadrat n categoria sistemelor liniare pe poriuni. Trebuie analizat cu grij
comportarea sistemului la limita de comutare . y
2
Y
2
Se poate declana o micare oscilant n jurul acestui punct, denumit i
fenomen de "agare", n unele aplicaii benefic n altele trebuind evitat sau
asigurate proceduri de ieire din regimul de agare.
+
u
F
u
R2 R2
y
R1
y y
1
y
1
y
2
H (s)
R1
H (s)
R2
+
- -
v
Partea fix
u
R2
y
2
2
Y*
0
Figura nr.1.4.1.
1.4.3. Sisteme de reglare convergent avnd corecia suplimentar
aplicat la intrarea n legea de reglare
Structur anterioar dar cu corecie la intrarea n legea de reglare
principal este prezentat n Fig.1.4.2.
+
u
F
u
R2
R2
y
R2
y
R1
y y
1
y
1
y
2
H (s)
R1
H (s)
R2
+
- -
v
Partea fix
u
R2
y
2
2
Y*
0
Figura nr.1.4.2.
O aplicaie des folosit a acestei structuri se ntlnete la reglarea vitezei de
rotaie a unor motoare electrice, n care este viteza de rotaie i este y
1
y
2
curentuul rotoric. Se tie c dac valoarea cuplului rezistent, care este o
perturbaie, crete valoarea curentului rortoric poate deosi limirte de funcionare
normal moment n care sistemele de protecie declaneaz oprirea sistemului, cu
consecinele corespunztoare. Cu structura de mai susu se evit astfel de situaii.
Dac se pot asigura performane superioare pentru viteza de rotaie. y
2
< Y
2
Cnd prin bucla suplimentar se limiteaz valoarea curentului, chiar dac y
2
> Y
2
pentru viteza de rotaie scad performanwele,dar sistemul nu se oprete i poate
reveni singur la structura iniial.
1. SISTEME NECONVENIONALE 1.4. Sisteme de reglare convergent
SPECIFICE DE REGLARE AUTOMAT
12
1.5. Sisteme de reglare paralel
1.5.1. Definiia sistemelor de reglare paralel
Sistemele de reglare paralel sunt sisteme n care o aceeai mrime de
execuie este controlat de bucle de reglare separate care nu opereaz n acelai
timp.
Reglarea paralel se aplic la procese cu mai multe mrimi ce trebuiesc
controlate dar folosind o unic mrime de comand. Pentru fiecare mrime
reglate este prevzut bucl de reglare specific, cu mrime prescris
corespnztoare.
n funcie de anumite condiii, dependente de starea procesului condus, se
permite accesul la mrimea de comanda numai a unei singure bucle de reglare,
care devine astfel bucl activ.
Se efectueaz reglarea numai a mrimii aferent buclei active, celelalte
mrimi de ieire fiind libere, afectate de perturbaii i de comenzile date de bucla
activ.
Accesul la comand se realizeaz printr-un circuit logic care realizeaa
comutarea mrimii de intrare n partea fix a sistemului la ieirea din regulatorul
care va deveni activ n funcie de o variabil de stare logic . S
1. SISTEME NECONVENIONALE 1.5. Sisteme de reglare paralel
SPECIFICE DE REGLARE AUTOMAT
13
1.5.2. Sistem de reglare paralel cu dou bucle
n Fig.1.5.1.a. este prezentat o structur de reglare paralel cu dou bucle.
+
+
u
F
R2
y
R1
y
2
H (s)
R1
H (s)
R2
-
-
1
Partea fix
2
Y*
Y*
1
S=1
S=0
S
y
2
y
2
y
1
S
0
1
a)
b)
Y
1
Y
2
1
v Y*
1
=
v
2
2
Y* =
Y
1
Y
2
R( , )=0
2
Y
0
Figura nr.1.5.1.
Partea fix a sistemului are dou mrimi de ieire, , ce reprezint y
1
, y
2
mrimile de ieire din traductoarele a dou mrimi fizice, i o singur mrime de
comand , intrarea n elementul de execuie. u
F
Starea care dirijeaz circuitul de comutie, n acest exemplu depinde numai
de mrimea este dat de relaia, y
2
(1.5.1) S
'
1, y
2
Y
2
0
0, y
2
< Y
2
0
astfel c dac se conecteaz bucla iar dac se conecteaz y
2
< Y
2
0
y
1
y
2
Y
2
0
bucla . y
2
Presupunem c ambele bucle asigur eroare staionar de poziie nul. n
regim staionar acest sistem realizeaz relaia din Fig.1.5.1.b. ,
R(Y
1
, Y
2
) 0
unde
Y
1
y
1
(), Y
2
y
2
()
cu valorile
Y
1
v
1
, Y
2
v
2
date de mrimile prescrise, evident cu condiia
v
2
Y
1
Y
1
0
Implementarea acestei structuri presupune asigurarea condiiilor de
comutare fr ocuri la elementul de execuie.
1. SISTEME NECONVENIONALE 1.5. Sisteme de reglare paralel
SPECIFICE DE REGLARE AUTOMAT
14
1.5.3. Exemple de aplicare a sistemelor de reglare paralel
Structura de reglare paralel de mai sus este frecvent ntlnit n sistemele
de control a incrcrii bateriilor de acumulatoare electrice n care curentul y
1
i
prin baterie iar tensiunea la bornele bateriei. y
2
u
Atta timp ct tensiunhea la bornele bateriei este mai mic dect o valoare
dat , de exemplu , se realizeaz reglarea curentului de Y
2
0
U
0
U
0
12V
ncrcare la valoarea constant , de exemplu . v
1
Y
1
6A
In aceste condiii sursa de alimentare a ncrcrii se comport ca o surs de
curent.
Pe msur ce bateria se ncarc, tensiunea ei la borne crete. nd aceasta
atinge valoarea nominal se conecteaz bucla de reglare a tensiunii i se U
0
menine constant valoarea tensiunii . v
2
Y
2
Y
2
0
U
0
Pentru o funcionare corect i stabil a structurii trebuyie evitate
comutaiile nedorite, sau intrarea n regim de alunecare. n acest scop
varacteristiva neliniar care definete starea de comutare este prevzut cu zone
de histerezis sau se introduc filtre suplimentare.
Un alt exemplu, des ntlnit n practic, de aplicare a structurii de reglare
paralel, l constituie sistemele de reglare a vitezei de rotaie la mainile electrice
n care este viteza de rotaie iar este curentul rotoric. y
1
y
2
i
Atta timp ct curentul rotoric este mai mic dect o valoare limit Y
2
0
I
0
se realizeaz reglarea vitezei de rotaie dup o caracteristic dur, adic se
menine viteza de rotaie la o valoare constant n regim staionar
, oricare ar fi cuplul rezistent. v
1
Y
1
Dac intensitatea curentului rotoric depete valoarea limit , datorit I
0
aplicrii unui cuplu rezistent de valoare mare peste o valoare critic, atunci,
pentru a nu arde motorul, se renun la reglarea vitezei de rotaie i se menine
curentul rotoric la valoarea nominal . I
0
In acest regim motorul se rotete cu o vitez maxim posibil dar pentru
care absoarbe un curent . I
0
n momentul n care cuplul rezistent scade sub valorile critice de mai sus se
revine n mod automat la meninerea vitezei de rotaie la valoarea prescris
. v
1
Y
1
1. SISTEME NECONVENIONALE 1.5. Sisteme de reglare paralel
SPECIFICE DE REGLARE AUTOMAT
15
1.6. Sisteme de reglare cu corecie suplimentar n regim
tranzitoriu
Sunt sisteme prevzute cu o bucl principal de reglare dar la care se
aplic, la intrarea sau ieirea regulatorului principal, corecii suplimentare numai
n regim tranzitoriu. n regim staionar aceste corecii sunt zero. Acest lucru este
posibil dac elementele de corecie au caracter derivator. n Fig.1.6.1. este
prezentat un astfel de sitem cu un singur circuit de corecie suplimentar.
+
u
F
u
R2 R2
y
R2
y
R1
y y
1
y
1
y
2
H (s)
R1
H (s)
R2
H (0)=0
R2
+
- -
v
Partea fix
H (s)=
R2
T s
T s+1
2
d2
Figura nr.1.6.1.
Elementul de corecie, dac este liniar descris printr-o funcie de transfer
are caracter derivator adic, . H
R2
(s) H
R2
(0) 0
In particular se poate utiliza o funcie de transfer de tip de forma, D
real
(1.6.1) H
R2
(s) K
R2
T
d2
s
T
2
s +1
Aa cum se observ, sistemele de reglare cu corecie suplimentar n regim
tranzitoriu sunt un caz particular al sistemelor de reglare convergent n care
elementele de corecie au caracter derivator.
Aceste structuri de reglare sunt folosite n sistemele cu timp mort, pentru a
realiza o anticipare a evoluiei mrimii reglate principal ca urmare a aplicrii
unor comenzi ce se transmit cu vitez finit.
De exemplu, la cazanele de aburi din centralele electrice, trebuie meninut
temperatura aburului viu (aburul ce intr n turbin), la valori constante n limite
foarte nguste, adic o precizie relativ foarte mare. Contrar este 524
o
C t 4
o
C
posibil s apar condens pe palele turbinei care pot s o dezechilibreze. La viteza
mare de rotaie i la masa enorm a turbinei apar vibraii cu 3000rot/ min
consecine posibil dezastruaose.
Reglarea temperaturii se face prin injecie de ap rerce n puncte
intermediare ale cazanului care este de fapt un sistem de evi cu lungimi ajungnd
la 30-50m. Mrimile intermediare sunt tepmperaturi pe parcursul circuitului ale
cror variaii semnaleaz c n acel punct a ajuns corecia de temperatur, care se
vor transmite ctre ieire i n consecin trebuie sa nu se modifice injecia.
1. SISTEME NECONVENIONALE 1.6. Sisteme de reglare cu corecie suplimentar
SPECIFICE DE REGLARE AUTOMAT n regim tranzitoriu
16
1.7. Sisteme de reglare cu corecie a regimului tranzitoriu
Sisteme de reglare cu corecie a regimului tranzitoriu fac parte din
categoria sistemelor cu model etalon.
Procesul condus primete aceeai mrime de intrare ca i un sistem model
numit i sau sistem referin, i ideal ar trebui ca rspunsurile lor respectiv y(t)
s fie identice , ori care ar fi mrimea de intrare aplicat. y
mod
(t) t
Deoarece modelele matematice ale celor dou sisteme nu sunt identice i
deoarece asupra procesului condus acioneaz o serie de perturbaii cele dou
rspunsuri sunt diferiterezultnd o eroare nenul,
. (1.7.1) (t) y
mod
(t) y(t)
Structura de reglare cu corecie a regimului tranzitoriu presupune aplicarea
unor corecii aditive la intrarea procesului condus, dependente de eroarea (t)
printr-o lege de reglare , astfel nct aceast eroare s fie nul sau ct mai H
R
(s)
mic ntr-o anumit norm. Un astfel de sistem este prezentat n Fig.1.7.1.
+
+
+
u
F
R
y
R
y
y
mod
y
mod
H (s)
F
H (s)
R
H (s)
mod
-
v v
v
y
y
+
+ +
H (s)
F
H (s)
R
H (s)
R
H (s)
mod
-
v v
v
y
Figura nr.1.7.1. Figura nr.1.7.2.
Acesta nu este un sistem de reglare n sensul obinuit deoarece nu exist un
element de comparaie faa de o mrime prescris, care este un semnal, ci se
dorete egalitatea dintre dou funcii, rspunsul modelului i cel al procesului la
ori care intrare aplicat , eventual dintr-o anumit clas. v(t)
Sistemul se poate reprezenta printr-o structur echivalent ca n Fig.1.7.2.
din care se calculeaz,
(1.7.2) Y(s) [ 1 + H
mod
(s) H
R
(s)]
H
F
(s)
1 +H
R
(s) H
F
(s)
V(s)
sau, (1.7.3) Y(s) [
1
H
R
(s)
+H
mod
(s)]
1
1 +
1
H
R
(s)H
F
(s)
V(s)
Se observ ca dac , de exemplu , H
R
(s) K
R
. (1.7.4) Y(s) H
mod
(s) V(s) Y(s) Y
mod
(s)
1. SISTEME NECONVENIONALE 1.7. Sisteme de reglare cu corecie suplimentar
SPECIFICE DE REGLARE AUTOMAT a regimului tranzitoriu
17
1.8. Sisteme de reglare cu structur variabil
1.8.1. Definiia sistemelor cu strctur variabil
Sistemele de reglare cu structur variabil (SRSV) sunt sisteme n care
parametrii sistemului (parametrii legii de reglare i ai prii fixe) i/sau relaiile de
conexiune se modific n salt n funcie de starea sistemului, care include starea
regulatorului i a prii fixe, sau n funcie de caracteristicile unor mrimi de
intrare (mrimea prescris sau perturbaii).
n acest context, valorile parametrilor i relaiile de conexiune existente la
un moment dat, definesc o structur.
Sistemele n timp continuu cu structur variabil, n esten sunt descrise
prin sisteme de ecuaii difereniale cu partea dreapt discontinu. Acestea nu se
ncadreaz n teoria clasic a ecuaiilor difereniale.
Exist metode specifice de abordare ca de exemplu prin teoria distribuiilor
sau abordarea Filippov.
Prin excelen sistemele cu structur variabil sunt sisteme neliniare. Un
caz particular de SRSV l constituie sistemele n care fiecare structur exorim un
sistem liniar, fiind ncadrate n clasa sistemelor liniare pe poriuni eventual
nzestrate cu un mecanism exterior de schimbare a structurii.
1.8.2. Exemplu de sistem cu structur variabil
Se tie c n general, ntr-un sistem liniar, dac factorul de proporionalitate
al legii de reglare are valoare mic, , atunci polii funciei de K
R
K
R
K
R
mic
transfer pot fi reali i rspunsul sistemului este aperiodic, fr suprareglaj aa cum
este ilustrat n Fig.1.8.1. Acesta este un avantaj dar din pcate rspunsul este prea
lent ceeace nseamn un dezavantaj n special cnd eroarea sistemului este mare.
v
v-
v+
t
v-y
y
Sistem liniar
Sistem cu structur variabil
Sistem cu structur variabil
Sistem liniar
K = K
R R
mic
K = K
R R
mic
K = K
R R
mare
K = K
R R
mare
Figura nr.1.8.1.
1. SISTEME NECONVENIONALE 1.8. Sisteme de reglare cu structur variabil
SPECIFICE DE REGLARE AUTOMAT
18
Dac n schimb factorul de proporionalitate are valoare mare K
R
, polii pot fi complex conjugai i rspunsul este oscilant amortizat cu K
R
K
R
mare
un suprareglaj mare, ceeace este un dezavantaj dar rspunsul este rapid ceea ce
nseamn un avantaj mare.
Deci prin cele dou valori ale parametrului s-au definit dou structuri K
R
S
(1.8.1) S S
1
K
R
K
R
mic
. (1.8.2) S S
2
K
R
K
R
mare
Se poate concepe un sistem care s preia avantajele de la fiecare structur.
n acest scop se msoar eroarea sistemului i dac aceasta are o valoare n modul
peste o anumit limit se seteaz i dac eroarea este mic n modul K
R
K
R
mare
se seteaz . K
R
K
R
mic
Acesta este de fapt un sistem cu structur variabil cu o evoluie ca n
Fig.1.8.1. ce fructific avantajele fiecrei structuri.
Dac mrimea reglat este departe de valoarea prescris, sistemul are o
evoluie rapid iar, dac mrimea reglat este aproape de valoarea prescris,
evoluia este lent i se evit apriia unor suprareglaje.
Pentru a concretiza aceast idee, se definete o vecintate de lime lateral
a valorii prescrise i un semnal s
(1.8.3) s
denumit criteriu de modificare a structurii.
In funcie de valoarea lui s se identific structura necesar i anume
; . (1.8.4) s 0 S S
1
s > 0 S S
2
Se concepe un dispozitiv pentru modificarea parametrilor legii de
reglare realizeaa relaiile,
(1.8.5) s 0 S S
1
K
R
K
R
mic
(1.8.6) s > 0 S S
2
> K
R
K
R
mare
Pentru ca sistemul cu structur variabil s se comporte ca n Fig.1.8.1.
trebuie conceput i un dispozitiv de evitare sau numai atenuare da ocurilor care
pot apare la modificarea structurii.
De exemplu, dac legea de reglare este de tip PI i se noteaz
(1.8.7) w(t) K
R
(t)
atunci semnalul de comand este
(1.8.8) y
c
(t) y
c
(t
0
) + w(t) +
1
T
i
t
0
t
w()d
Dac n momentul comutrii la , eroarea are o valoare t t
1
S
2
S
1
1
(t
1
) 0
atunci mrimea de comand are o variaie brusc, uneori inacceptabil,
. (1.8.9)
y
c
(t
1
+
) y
c
(t
1
) [K
R
mare
K
R
mare
]
1
1. SISTEME NECONVENIONALE 1.8. Sisteme de reglare cu structur variabil
SPECIFICE DE REGLARE AUTOMAT
19
1.8.3. Regimuri de evoluie n sistemele cu structur variabil
ntr-un sistem cu structur variabil, ca n orice sistem neliniar, sunt
posibile regimuri de evoluie care nu pot fi ntlnite la sistemele liniare.
Caracteristica esenial n evoluia sistemelor cu structur variabil o
constituie existena i unicitatea strii sistemului. Variabilele de stare sunt funcii
continuale n timp.
La unele sisteme cu structur variabil, ce conin numai susbsisteme
continue cu intrri mrginite, variabilele de stare sunt funcii continuale i n plus
sunt i funcii continue funcii n timp.
Pentru aceste cazuri, sistemul intr ntr-o anumit structur cu o valoare
iniial a strii, egal cu valoarea final a acestei stri din evoluia n structura
anterioar. Se remarc dou de regimuri de evoluie:
Regimul de comutare (switching mode)
Regimul de alunecare (sliding mode)
1.8.3.1. Regimul de comutare
n regimul de comutare starea sistemului parcurge o succesiune de
structuri, evoluia n fiecare structur fiind de durat finit.
Succesiunea parcurgerii structurilor sau mai precis comutarea structurilor
poate fi liber sau forat.
Comutarea liber este determinat de atingerea unor valori critice sau
specificate ale strii eventual grupate n familii de valori critice. O familie de
valori critice determin o anumit structur i numai una.
n regimul de comutare liber, comutarea structurilor se realizeaz astfel n
circuit nchis.
Comutarea forat a structurilor se realizeaz n funcie de valorile unui
semnal extern sau n funcie de condiii de comutare externe sistemului.
n regimul de comutare forat, comutarea structurilor se realizeaz astfel
n circuit deschis.
1.8.3.2. Exemplu de regim de comutare
Se consider dou structuri, , liniare la limita de stabilitate, S
1
, S
2
caracterizate prin dou valori ale pulsaiei libere ,
1
>
2
(1.8.10) S
1
:
y (t) + [
1
]
2
y(t) 0
, (1.8.11) S
2
:
y (t) + [
2
]
2
y(t) 0
crora le corespund traiectorii n spaiul fazelor `
(1.8.12) x
1
(t) y(t) , x
2
(t)
y (t)
1. SISTEME NECONVENIONALE 1.8. Sisteme de reglare cu structur variabil
SPECIFICE DE REGLARE AUTOMAT
20
de forma,
(1.8.13) S
1
: ( x
1
)
2
+ (
x
2
1
)
2
A
1
, A
1
A
1
(
1
, x
1
(t
0
), x
2
(t
0
)) 0
(1.8.14) S
2
: ( x
1
)
2
+(
x
2
2
)
2
A
2
, A
2
A
2
(
2
, x
1
(t
0
), x
2
(t
0
)) 0
as cum este ilustrat n Fig.1.8.2.
n fiecare structur rspunsul sistemului este un semnal sinusoidal, fiecare
cu o anumit amplitudine i pulsaie, dependente de parametrii structurii
respective (n cazul de fa numai pulsaia liber) i de condiiile iniiale n care se
ncepe evoluia n cadrul structurii.
Deoarece , structura are traiectoriile mai alungite pe vertical
1
>
2
S
1
dect , pornind din aceleai condiii iniiale. S
2
Se observ c, dac n cadranele I i III, se alege structura iar n S
1
cadranele III i IV se alege structura atunci din dou sisteme la limita de S
2
stabilitate se pot obin evoluii stabile.
Se reamintete c la sistemele neliniare proprietatea de stabilitate este a
unei soluii (traiectorii) i nu se poate generaliza la nivelul unui sistem ca n cazul
liniar.
S
1
S
1
S
2
S
2
x x =
1 2
.
x
1
Figura nr.1.8.2.
Pentru a concretiza aceast idee, se definete criteriul de modificare a
structurii
(1.8.15) s x
1
x
2
In funcie de valoarea lui s se identific structura necesar i anume
(1.8.16) s x
1
x
2
0 S S
1
. (1.8.17) s x
1
x
2
< 0 S S
2
1. SISTEME NECONVENIONALE 1.8. Sisteme de reglare cu structur variabil
SPECIFICE DE REGLARE AUTOMAT
21
Se concepe un dispozitiv pentru modificarea parametrilor ce determin
pulsaia sau . Acesta realizeaz relaiile,
1
2
(1.8.18) s 0 S S
1
x
1
x
2
0
1
(1.8.19) s < 0 S S
2
x
1
x
2
< 0
2
Ecuaia care exprim o limit criteriului de modificare a structurii (n cazul de
fa zero) , , definete curbele de comutare, sau curbele de schimbare a s 0
structurii. n cazul de fa
sau (1.8.20) s 0 x
1
0 x
2
0
sunt denumite i drepte de comutare.
1.8.3.3. Regimul de alunecare
Regimul de alunecare se caracterizeaz prin schimbarea alternativ a dou
structuri cu o frecvena de comutare, teoretic infinit, practic foarte mare. S
1
, S
2
Dac comutrile au loc n conformitate cu un criteriu de comutare
(1.8.21) s s(x), x [x
1
, ... , x
n
]
T
ce realizeraz n spaiul de stare al unui sistem de ordinul n,
(1.8.22) s(x) > 0 S S
1
(1.8.23) s(x) < 0 S S
2
atunci, n prima structur valoarea criteriului este avnd ns S
1
s(x) > 0
traiectoriile ndreptate spre cealalt structur astfel c starea depete curba dat
de i intr n domeniul unde ce corespunde celei de a doua s(x) 0 s < 0
structuri dar cu traiectoriile sunt ndrepotate spre prima structur s.a.m.d., cum S
2
este ilustrat i n Fig.1.8.3.
x
1
S
1
S
1
S
1
S
1
S
1
S
1
S
1
S
1
S
1
S
2
S
2
S
2
S
2
S
2
S
2
x
2
s=0
s<0
s>0
x
1
x
2
(t ) (t )
0 0
;
Evoluia ctre
regimul de alunecare
Figura nr.1.8.3.
Are loc astfel un fenomen de "alunecare" de-a lungul unei curbe, denumit
curba de alunecare, o soluie care verific ecuaia
. (1.8.24) s(x) 0
1. SISTEME NECONVENIONALE 1.8. Sisteme de reglare cu structur variabil
SPECIFICE DE REGLARE AUTOMAT
22
Aceasta nseamn de fapt o restricie n spaiul strilur deci corespunde
unei evoluii a unui sistem echivalent de ordinul . n 1
De exemplu, dac i variabilele de stare sunt variabile de faz, adic n 2
, atunci o curb de comutare dat de , nseamn
x
1
x
2
s(x) x
2
c x
1
0
asigurarea n regim de alunecare a unei evoluii de ordinul nti
(1.8.27)
x
1
c x
1
indiferent de parametrii sistemelor ce definesc cele dou structuri.
n regimn de alunecare se obine o evoluie robust, ndependent de
sistemele componente ns numai dac este posibil un regim de alunecare adic
traiectoriile sunt ndreptate unele ctre celelalte. Contr se realizeaz eventual un
regim de comutare.
ntr-un sistem de reglare n regim de alunecare (sliding mode control) se
deosebesc dou etape:
1. Etapa de atingere a curbei de alunecare, ce poate nsemna evoluii n
regim de comutare
2. Etapa de evoluie n regim de alunecare, numai dac se atinge curba de
comutare n care este adevrat acest fenomen.
Evoluia n regim de alunecare se traduce pna la urm n realizarea unor
variaii alternative ale mrimii de execuie cu frecven mare sau foarte mare.
Sistemele de reglare n regim de alunecare se pot aplica la procesele n care
mrimea de execuie poate suporta astfel de variaii.
Un exemplu des ntlnit n practic l constituie acionrile electrice ce
folosesc convertoare statice.
1.8.4. Schema bloc general a unui sistem cu structur variabila
Este indicat n Fig.1.8.4. n care se regsesc toate elementele prezentate mai sus.
u
F
u
F
x
R
x
R
x
F
x
F
y
R
H (s)
R
H (s)
F
+
v
v
v
y
y y
y
Modificarea
parametrilor
s=f(y, ,v, , ) u
F
x
R
x
F
Evaluarea criteriulu dei
modificare a structurii
Identificarea
structurii
s
Figura nr.1.8.4.
1. SISTEME NECONVENIONALE 1.8. Sisteme de reglare cu structur variabil
SPECIFICE DE REGLARE AUTOMAT
23
2. SISTEME CU NUMR FINIT DE VALORI PENTRU
MRIMEA DE COMAND
2.1. Introducere
Deoarece n general elementele de execuie care pot asigura la ieire
oricare valoare ntr-un interval, denumite i elemente analogice, sunt scumpe, n
special pentru puteri mari, sunt des folosite elemente ce asigur pentru mrimea
de comand numai un numr finit de valori.
n general se spune c o mrime care poate lua oricare valoare dintr-un
interval, submulime a lui , se numete mrime analogic. Mrimile care nu R
au aceast proprietate nu se numesc "neanalogice" ci au denumiri specifice.
Sistemele care au ca intrare o mrime analogic iar ca ieire o mrime cu
un numr finit de valori se numesc sisteme cu cuantificare n amplitudine.
Aceste sisteme au o comportare intrare-ieire neliniar, mai precis exprim
neliniariti eseniale pentru care nu mai sunt posibile aproximri liniare de
exemplu prin dezvoltare n serie Taylor i trunchiere la gradul nti.
Deoarece aceste elemente sunt introduse odat cu strategia de conducere,
astfel de sisteme de reglare se mai numesc i sisteme cu legi de reglare neliniar.
Sunt situaii n care instalaia tehnologic poate fi comandat prin mrimi
cu valori oarecare ntr-un interval (intrarea n instalaia tehnologic este o mrime
analogic), ns, din motive de utilizare a unor elemente de execuie ieftine,
aceste instalaii sunt comandate numai cu un mnumr finit de valori.
In aceast categorie se deosebesc:
1. Sisteme de reglare bipoziional. Sunt denumite i sisteme cu legi de reglare
bipoziionala sau sisteme cu comenzi de tip on-off. Evident n aceste sisteme
mrimea de comand poate lua numai dou valori.
2. Sisteme de reglare tripoziional. n aceste sisteme mrimea de comand poate
lua trei valori. Sunt denumite i sisteme cu legi de reglare de tip VMD (Valve
Motor Drive).
3. Sisteme de reglare multipoziional. n aceste sisteme mrimea de comand
poate lua un numr finit de valori obinute prin cuantificare n amplitudine,
prin diferite dispozitive i cu anumite scopuri.
Pentru fiecare din categoriile de mai sus se deosebesc diferite
structuri de sisteme de reglare n principal grupate n:
Sisteme cu comutaie liber
Sisteme cu comutaie forat
2. SISTEME CU NUMR FINIT DE VALORI 2.1. Introducere
PENTRU MRIMEA DE COMAND
24
2.2. Sisteme de reglare bipoziional cu caracteristic de tip
histerezis
2.2.1. Elemente de comand bipoziional
Sunt elemente care au la intrare o mrimne analogic, de exemplu ,
(2.2.1) [E
min
, E
max
] R
iar la ieire o mrime , de exemplu x, ce poate lua numai dou valori,
(2.2.2) x {X
1
, X
2
}
unde valorile pot reprezenta etichete (on , off), simboluri logice (0 , 1) , X
1
, X
2
numere (23, 45 ) sau valori ale unor mrimi fizice.
Pot exprima valoarea de adevr a unor propoziii exprimate prin variabilele
logice (T, F), starea unor contacte electrice (0 ,1), sau alte caracteristici fizice sau
abstracte.
Elementele bipoziionale pot fi realizate n mod explicit prin dispozitive
fizice, programe de calculator sau pot fi rezultatul unor reprezentri matematice
echivalente ale unor fenomene fizice sau abstracte.
Exist dou categorii de elemente bipoziionale:
1. Elemente bipoziionale fr histerezis
2. Elemente bipoziionale cu histerezis
2.2.1.1. Elemente bipoziionale fr histerezis
Dependena intrare-ieire este o funcie bine definit, reprezentat ca n
Fig.2.2.1.
(2.2.3) x
'
X
1
, <
0
X
2
,
0
Un element bipoziional fr histerezis este un element nedinamic, adic
fr memorie sau de tip scalor.
0
x
X
1
X
2
[
)
Figura nr.2.2.1.
Implementarea numeric nseamn o simpla condiie IF.
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
25
2.2.1.2. Elemente bipoziionale cu histerezis
Dependena intrare-ieire este neunivoc aa cm se vede n Fig.2.2.2.
Restabilirea univocitii intrare-ieire se face prin introducerea unei variabile de
stare care poate lua dou valori: etichetate cumva, de exemplu (on, off ) sau pot fi
chiar valorile ( ). X
1
, X
2
) [
1
x
X
1
X
2
[ ) [
)
Figura nr.2.2.2.
Ecuaia de evoluie a ieiriii este o ecuaie funcional de forma,
(2.2.4) x(t)
'
X
1
, (t) <
1
X
2
, (t)
2
x(t
) , (t) [
1
,
2
)
Prin se nelege limita la stnga n punctul t. Cu alte cuvinte, dac x(t
)
intrarea la momentul t este atunci se pstreaz valoarea anterioar (t) [
1
,
2
)
a ieirii . Dac se obine elementul bopoziional fr histerezis. x
1
2
Un program de implementare a unui element bipoziional cu histerezis
poate fi de forma,
Daca initializare
Citeste E1, E2, X1, X2, X
Altfel, la fiecare pas:
Citeste E
Daca E < E1, X=X1
Daca E >= E2, X=X2
Scrie X
Se observ c dac nu se face nici-o (t) [
1
,
2
) E [E1, E2)
actualizare i se menine valoarea anterioar a ieirii. Pentru demararea procedurii
n ertapa de iniializare trebuie dat valoarea iniial a ieirii, deci sistemul este
dinamic de ordinul nti deoarece este suficient o singur informaie iniial.
Exist nenumrate dispozitive i fenomene fizice descrise prin relaii
intrare-ieire de tip element bipoziional cu histerezis.
n sistemele de reglare a temperaturii aa numitele "termostate" , cu
bimetal sau cu lichid, sunt prin excelen astfel de elemente, aa cum se va
analiza n exemplul urmtor.
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
26
2.2.2. Exemplu de sistem bipoziional pentru reglarea temperaturii
2.2.2.1. Schema de principiu a sistemului
Se consider un sistem de reglare a temperaturii ntr-o incint termic
folosind un "termostat" cu bimetal prezentat n Fig.2.2.3.
Aceste este alctuit din doua metale cu coeficieni diferii de dilatare fixate
rigid ntre ele.
Structura se deformeaz puternic la modificarea temperaturii asfel c
realizeaz deschiderea i nchiderea unui contact electric.
Starea contactului este reprezentat prin variabila logic . x
crete
x
bimetal
N S
1
2
x
( ]
( ]
X
2
=1
X
1 =0
y=
v
(
]
Figura nr.2.2.3. Figura nr.2.2.4.
Pentru realizarea unor contacte rapide i ferme, dispozitivul este prevzut
cu magnei permanani. Frecvent n locul magneilor permaneni se utilizeaz
sisteme de plcue din metal elastic deformate ce-i pot schimba concavitatea la
aplicarea unor fore. Forele sunt determinate de deformarea structurii cu bimetal
sub influena temperaturii.
n nenumrate aplicaii simple, inclusiv n aparatura electro-casnic,
termostatul este prevzut, n loc de bimetal, cu un tub n care se gsete un lichid
cu coeficient mare de dilatare.
Dilatarea acestui lichid, sub influena temperaturii, determin aplicarea
unor fore la placue a cror concavitate se poate modifica i care astfel determin
nchiderea i deschiderea unor contacte electrice.
Un termostat, indiferent de realizarea sa fizic, poate fi interpretata ca un
obiect oerientat cauzal cu ieirea , starea contactului electric i intrarea x x(t)
temperatura notat . Dependena intrare-ieire este neunivoc de tip y(t) (t)
histerezis.
Se constat, eventual experimental, c dac temperatura este mai mare
dect o valoare , atunci contactul este deschis, adic , iar dac
2
y(t) >
2
x(t) 0
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
27
temperatura este mai mica sau egal cu o valoare , atunci contactul
1
y(t)
1
electric este nchis adica . x(t) 1
Pentru o valoare a temperaturii ntre cele dou limite,
se pstreaz starea anterioar a cotactelor adic . y(t) (t) [
1
,
2
) x(t) x(t
)
Valorile limit depind de parametrii de ajustare ai termostatului.
1
,
2
Aceast dependen intrare-ieire, reprezentat n Fig.2.2.4. , este o dependen
de tip histerezis "descresctoare", avnd n vedere ordinea dat de valorile
variabilei , i este exprimat concentrat n (2.2.5) x
(2.2.5) x(t)
'
0, y(t) >
2
1, y(t)
1
x(t
) , y(t) (
1
,
2
]
Cu aceste precizri se poate nelege comportarea sistemului de reglare
reprezentat prin schema de principiu din Fig.2.2.5.
I
0
I
1
R
1
R
0
B
crete
x
bimetal
x
x
E
~
Surs
de
energie
Surs
decurent
continuu
electromagnetic
Releu
Incint
termic
I = xI + BI
0 1
Figura nr.2.2.5.
Contactul electric al termostatului acioneaz un releu electromagnetic care
are la rndul lui are un contact normal deschis ce poate comanda un curent de
valore mare printr-o rezisten de nclzire . I
0
R
0
Pentru toate contactele electrice s-a ataat o aceeai variabil logic , dei x
ele sunt complet diferite din punct de vedere fizic.
O rezistena suplimentar este alimentat cu un curent dac starea R
1
I
1
unui buton, are valoarea . B {0, 1} B 1
Deci, incinta termic este nclzit cu un curent de intensitate,
. (2.2.6) I x I
0
+B I
1
I(t) x(t) I
0
+ B(t) I
1
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
28
Comportarea sistemului se exprim n cuvinte astfel:
Dac temperatura crete peste limita contactul termostatului se
2
deschide, releul electromagnetic nu este alimentat i deci se oprete curentul x 0
adic incinta este nclzit cu un curent mai mic I
0
. (2.2.7) I
off
B I
1
< I
0
+ B I
1
Ca urmare, temperartura scade (numai dac perturbaiile determin
scderea temperaturii cu ). Cnd aceasta atinge o valoare , I I
off
1
termostatul are contactul nchis, se acioneaz releul electromagnetic i , x 1
astfel c incinta este nclzit cu un curent mai mare I
on
(2.2.8) I
on
I
0
+ B I
1
> I
off
care determin creterea temperaturii (numai dac perturbaiile permit creterea
temperaturii cu ). I I
on
Procesul descris mai sus se repet i rezult o reglare de tip bipoziional sau
on-off.
2.2.2.2. Schema bloc general a sistemului
Sistemul descris mai sus se poate reprezenta printr-o schem bloc general
n caere se evideniaz numai dou elemente: procesul condus i dispozitivul de
comand, ca n Fig.2.2.6.
ntre cele dou blocuri se evideniaz mrimea de execuie care n cazul de
fa este starea a contactelor. x
1
2
1
0
y=
v
( ]
( ]
(
]
x
x y =
y =
Dispozitiv de comand
Proces condus
Mrimea de execuie:
Starea contactelor
Mrimea reglat:
Temperatura
Mrimea reglat:
Temperatura
Parametri:
1 2
;
Perturbaii: ext
Figura nr.2.2.6.
Schema bloc general evideniaz numai interaciunea dintre procesul
condus i dispozitivul de conducere precum i caracteristicile acestora mpreun
cu perturbaiile i parametrii de ajustare. n exemplul de fa se consider c
singura perturbaie este temperatura mediului extern .
ext
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
29
2.2.2.3. Schema bloc echivalent a sistemului
Sistemul de reglare se poate reprezenta printr-o schem bloc echivalent
care are forma standard a unui sistem de reglare ncare a se precizeze mrimea
prescris i eroarea sistemului.
nacest scop se reprezint caracteristica termostatului din Fig.2.2.4. sau
relaiile (2.2.5) ca un element element bipoziional cu histerezis ca cel din
Fig.2.2.2. sau relaiile (2.2.4). n acest scop, considernd , se noteaz
2
1
(2.2.9) v
2
+
1
2
(2.2.10)
2
1
2
(2.2.11) v y
unde apare ca fiind o mrime prescris iar ca i eroare a sistemului n raport v
cu aceast mrime prescris.
Starea contactelor termostatului este acum descris n raport cu eroarea ,
(2.2.12) x(t)
'
0, (t) <
1, (t)
x(t
) , (t) [ , )
ntr-adevr, de exemplu condiia
, y >
2
x 0
este echivalent cu succesiunea de condiii,
; ; v >
2
x 0 < v
2
x 0 < x 0
deoarece,
. v
2
2
+
1
2
2
2
1
2
Instalaia este comandat printr-o intensitatre a curentului electric , I(t)
(2.2.6), ce ia un numr finit de valori
, I(t) {0, I
0
, I
1
, I
0
+ I
1
}
numai datorit structurii dispozitivului de conducere.
n realitate instalaia poate fi comandat i testat pentru orice valori I(t)
dintr-un interval.
Notm valoarea oarecare a curentului prin litera u , pentru a sublinia fatul
c este mrime de intrare
. (2.2.13) I(t) u(t)
Dac se se efectueaz o testare a instalaiei la variaia treapt a curentului
(2.2.14) u(t) I(t) I 1(t)
considernd constant temperatura mediului exterior
(2.2.15)
ext
(t)
ext
0
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
30
i se obine rspunsul din Fig.2.2.7.
u(t)=I(t)
t
t
I
(t)=y(t)
(t)
ext
T
K I
0
Figura nr.2.2.7.
Pe baza acestui rspuns se poate aproxima comportarea procesului condus ca fiind
descris de o funcie de transfer cu timp mort, , cu timpul mort la intrare H
F
(s)
(2.2.16) Y(s)
ext
(s) + Y
u
(s) y(t)
ext
(t) + y
u
(t)
unde
(2.2.17) Y
u
(s) H
F
(s) U(s) H
F
(s) W(s)
(2.2.18) H
F
(s) e
s
K
T s + 1
e
s
H
F
(s)
(2.2.19) H
F
(s)
K
T s +1
(2.2.20) W(s) e
s
U(s) w(t) u(t )
Cu aceste precizri, structura sistemului de reglare este reprezentat prin
schema bloc din Fig.2.2.8.
+
+
K
Ts+1
e
s
w(t) +
y=
y=
v
x
0
1
+
+
I
0
I(t)=u(t) (t)
(t)
ext
x
I(t) = x(t)I + B(t)I
B(t)I
1
Figura nr.2.2.8.
Mrimea de comand realizat de dispozitivul de reglare sau legea de
reglare poate lua numai dou valori y
R
(t)
(2.2.21) Y
R1
B(t) I
1
; Y
R2
I
0
+B(t) I
1
deci procesul condus cu intrarea , datorit relaieide conexiune u [U
min
, U
max
]
(2.2.22) u(t) Y
R
(t)
este comandat numai prin dou valori
,(2.2.23) U
1
Y
R1
B(t) I
1
; U
2
Y
R2
I
0
+ B(t) I
1
i rezult structura de reglare bipoziionala standard, din Fig.2.2.9.
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
31
2.2.3. Analiza comportrii unui sistem de reglare bipoziional
pentru un proces liniar de ordinul nti cu timp mort
2.2.3.1. Schema bloc i traiectorii posibile
Reprezentrile analizate n exemplul anterior conduc la structura general a
unui sistem de reglare bipoziional din Fig.2.2.10. a ieirii dintr-un proces liniar
de ordinul nti cu tmp mort asupra cruia acioneaz numai o singur perturbaie
deplasat la ieire. p(t)
Legea de reglare realizeaz o comand bipoziional cu histerezis de tipul
"mai puin" sau "mai mult", dat de ecuaia de tranziie
(2.2.24) y
R
(t)
'
Y
R1
, (t) <
Y
R2
, (t)
y
R
(t
) , (t) [ , )
reprezentat n Fig.2.2.9.
)[ )
0
[ )[
y
R
y
R1
y
R2
Figura nr.2.2.9.
Aceasta nseamn aplicarea numai a dou comenzi la intrarea procesului
condus,
.(2.2.25) u(t) y
R
(t) {U
1
, U
2
} ; U
1
Y
R1
; U
2
Y
R2
+
+
e
s
w(t) +
0
)[ )
[ )
[
y
R
y
R1
y
R2
p(t)
y(t)
(t)
v(t) y (t)=u(t)
R
Y
R1
1
U =
Y
R2
2
U =
K
Ts+1
y (t)
u
Figura nr.2.2.10.
Se consider timpul mort aplicat la intrare astfel c mrimea reglat
rspunde instantaneu la o mmrime intermediar ce reprezint valorile w(t)
mrimii de comanda ntrziate cu un timp , u(t)
. (2.2.26) W(s) e
s
U(s) w(t) u(t ) w() u()
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
32
Mrimea reglat este
(2.2.27) Y(s) P(s) + Y
u
(s) y(t) p(t) + y
u
(t)
unde componenta datorat numai mrimii dfe comand u este,
(2.2.28) Y
u
(s) H
F
(s) U(s) H
F
(s) W(s)
n care
. (2.2.29) H
F
(s) e
s
K
T s + 1
e
s
H
F
(s)
Deoarece mrimea de comand este o funcie constant pe poriuni i u(t)
, se exprim rspunsul , considernd c pentru mrimea w(t) u(t ) y
u
(t) t t
0
se menine constant adic w(t)
, (2.2.30) w(t) w() , t t
0
, w() u()
prin relaia,
(2.2.31) y
u
(t) y
u
() + e
tt
0
T
[y
u
(t
0
) y
u
()]
unde
(2.2.32) y
u
() H
F
(0) w() K w() K u()
Dac perturbaia este constant pentru , p(t) t t
0
(2.2.33) p(t) P
st
, t t
0
atunci se poate exprima evoluia mrimii reglate dintr-o valoare iniial oarecare
ctre o valoare final determinat de valoarea constant a mrimii y(t
0
) y()
intermediar cu w(t)
(2.2.34) w() u() {U
1
, U
2
}
prin relaia
. (2.2.35) y(t) P
st
+ K u() + e
tt
0
T
[y(t
0
) P
st
K u()]
Deoarece
(2.2.36) y() P
st
+ K u() {Y
1
, Y
2
}
(2.2.37) Y
1
P
st
+ K U
1
; Y
2
P
st
+K U
2
se obine,
2.2.38) y(t) y() + e
tt
0
T
[y(t
0
) y()]
Se calculeaz intervalul de timp n care mrimea reglat se modific, y(t)
sub aciunea unei aceleiai valori a mrimii de comand ce ar determina w(t)
, de la o valoare n momentul la o valoare ntr-un moment , y() y
1
t t
1
y
2
t t
2
, (2.2.39) y
1
y(t
1
) , y
2
y(t
2
)
prin relaia
. (2.2.40) t
2
t
1
T ln
y
1
y()
y
2
y()
Aceste evoluii i mrimi sunt ilustrate n Fig.2.2.11.
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
33
K
Ts+1
e
s
w(t) u(t) y(t)
u(t)
t
u
t
0
t
0
w(t)
t
u w =
w(t)=u(t- )
t
0
t
0
t
T
y(t)
t
0
t
0
y( )
t
0
t
1
t
2
y
2
y
1
y( )
y( )
. .
Figura nr.2.2.11.
2.2.3.2. Analiza comportrii prin explicitarea traiectoriilor de evoluie
Un astfel de sistem de reglare este prin excelen un sitem liniar pe
poriuni. O posibilitate de analiz const n reprzentarea tuturor familiilor de
traiectorii posibile i corelarea acestora prin condiiile de comutare determinate de
elementul neliniar, in particular cu histerezis.
n cazul de fa sunt posibile dou familii de traiectorii,
(2.2.41) w(t) U
1
, t t
0
y(t) Y
1
+ e
tt
0
T
[y(t
0
) Y
1
] y(t) Y
1
(2.2.42) w(t) U
2
, t t
0
y(t) Y
2
+ e
tt
0
T
[y(t
0
) Y
2
] y(t) Y
2
Familiile sunt generate de valoarea iniial oarecare . Sistemul de y(t
0
)
reglare este un sistem cu structur variabil n regim de comutare, caracterizat
prin evoluia continu a strii procesului condus ce poate fi chiar mrimea . y
u
(t)
Valoarea mrimii reglate ntr-un moment de comutare, ce evolueaz ntr-o
structur, considernd perturbaia o funcie continu, va fi valoarea iniial pentru
evoluia n structura urmtoare.
Se reprezint condiiile de comutare ale elememntului bipoziional cu
histerezis n funcie de valorile mrimii reglate , astfel: y(t)
(2.2.43) < v y < y > v+ u U
1
(2.2.41) y(t) Y
1
(2.2.44) v y y v u U
2
(2.2.42) y(t) Y
2
(2.2.45) [ , ) v < y v + u(t) u(t
) y(t) Y
1,2
old
Se observ c mrimea prescris v este nsoit de limitele de comutare
. n exemplul anterior acestea sunt: . v , v + v
1
, v+
2
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
34
Portretul traiectoriilor posibile i traiectoria efectiv realizat pornind
dintr-un punct iniial A, la momentul sunt ilustrate n Fig.2.2.12. t
A
v -
v +
v1 +
v1 -
t
t
t
y(t)
v
v1< v
w(t)
u(t)
U
1
U
1
U
2
U
2
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
T
on
T
off T
on
T
off
Y
1
Y
2
[
U1
u=
U2
u=
y>v+
)
v-
y
t
AtB
t
C
tD t
E
tF t
G t
I
t
J
t
K tL tM tN
tO t
P
tQ
tR t
H
Figura nr.2.2.12.
Aceast evoluie se poate exprima n cuvinte astfel:
Iniial sistemul se afla n punctul A, n condiia (2.2.43) i u(t) w(t) U
1
ieirea evolueaz ctre . n momentul se atinge punctul B care nseamn Y
1
t
B
condiia (2.2.45) i se pstreaz comanda anterioar.
n momentul n punctul C este indeplinit condiia (2.2.44) i t
C
u(t) U
2
ns, datorit fenomenului de timp mort (ntrziere pe intrare), mrimea w
pstreaz valoarea anterioar nc secunde pna n momentul w(t) U
1
perioad n care ieirea continu s evolueze ctre depindu-se t
D
t
C
+ Y
1
astfel valoarea de prag . v
n momentul , mrimea w are valoarea i ieirea evolueaz t
D
w(t) U
2
spre valoarea care dup zona de histerezis ajunge n punctul E la momentul Y
2
t
E
cnd este ndeplinit condiia (2.2.43) ce face ca dar , datorit u(t) U
1
ntrzierii mrimea w swe menine la valoarea anterioar nc w(t) U
2
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
35
secunde pn n momentul cnd i astfel c ieirea va evolua t
F
t
E
+ w(t) U
1
ctre vaoarea . Y
1
Procesul se repet, evoluia nseamn, dup punctul B, o micare oscilant
periodic cu cu suprareglajele
(2.2.46) Y
max
y(t
F
) v y(t
J
) v etc.
i subreglajele
(2.2.47) Y
min
y(t
D
) v y(t
K
) v etc.
aa cum mai clar se poate urmri n Fig.2.2.13. traiectoria realizat.
Se definesc intervalele n care instalaia este comandat la valoarea minim
respectiv la valoarea maxima prin valorile funciei sau ale T
OFF
T
ON
w(t)
comenzilor date de legea de reglare . u(t)
Din figurile de mai sus rezult
(2.2.48) T
OFF
t
H
t
F
t
L
t
J
etc.
(2.2.49) T
ON
t
F
t
D
t
J
t
H
etc.
Perioada oscilaiilor este
(2.2.50) T
OSC
T
OFF
+ T
ON
Ymax Ymax
v -
v +
v1 +
v1 -
y(t)
v
v1< v
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
Y
1
Y
2
[
t
Ymin Ymin
T
T
U2
u=
y>v+
v-
y
U1
u=
)
T
on
T
off T
on
T
off
tAtB tC
tD t
E
t
F tG tI
tJ
tK t
L t
M
t
N
t
O tP
tH
Figura nr.2.2.13.
n momentul valoarea mrimii prescris este v1 i dup un regim t
M
tranzitoriu rspunsul redevine oscilant periodic dar cu altin parametri nde
oscilaie.
Se pot stabili relaii de proiectare care exprim dependenele,
(2.2.51) T
ON
T
ON
(v, K, T, , ) ; T
OFF
T
OFF
(v, K, T, , )
. (2.2.52) Y
max
Y
max
(v, K, T, , ) ; Y
min
Y
min
(v, K, T, , )
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
36
2.2.3.3. Analiza comportrii prin reprezentarea traiectoriilor n spaiul
strilor
Ca orice sistem liniar pe poriuni i sistemul de reglare bipoziional poate
fi analizat prin reprezentarea traiectoriilor n spaiul strilor sau fazelor, pe scurt
prin portretul de faz considernd c perturbaiile au valori constante.
Pentru sisteme pn la ordinul doi acest mod de analiz este eficient i util.
Pentru ordine mai mari, procedura devine greoaie sau chiar imposibil de
manipulat.
n cazul de fa, procesul condus este de ordinul nti cu timp mort astfel
c, pentru fiecare structr, determinat de valorile mrimii de comand , u(t)
traiectoriile de faz n planul sunt segmente de dreapt. ( ,
)
Apar tranziii de la o traiectorie la alta care nseamn salturi brute n
derivata erorii aa cum era de asteptat deoarece rspunsul este o funcie
continu dar cu frngeri de pant n punctele de comutare.
n Fig.2.2.14. este schiat portretul de faz al sistemului de reglare.
U
1
u=
U
2
u=
Figura nr.2.2.14.
Se observ c n regim permanent evoluia este dat de cicluri limit
stabile.
2.2.3.4. Analiza comportrii prin utilizarea funciilor de descriere.
Prin metoda funciilor de descriere, bine cunoscut n teoria sistemelor
neliniare, sistemul neliniar este aproximat prntr-un sistem liniar din condiia de
echivalen a fundamentalei ddezvoltrii n serie Fourier a rspunsului nperiodic.
n anumite condiii de aplicabilitate se pot deduce formule pentru calculul
perioadei i amplitudinii oscilaiilor.
2. SISTEME CU NUMR FINIT DE VALORI 2.2. Sisteme de reglare bipoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
37
2.3. Sisteme de reglare tripoziional cu caracteristic de tip
histerezis
2.3.1. Elemente de comand tripoziional
Sunt elemente care au la intrare o mrimne analogic, de exemplu , w
(2.3.1) w [W
min
, W
max
] R
iar la ieire o mrime, de exemplu x, ce poate lua numai trei valori,
(2.3.2) x {X
1
, X
2
, X
3
}
unde valorile pot reprezenta etichete (up, down, rest), simboluri n X
1
, X
2
, X
3
logica ternar (-1, 0 , 1), numere (23, 45, 87 ) sau valori ale unor mrimi fizice.
Pot exprima trei valori numerice extrase din combinaia a doi bii.
Elementele tripoziionale pot fi realizate n mod explicit prin dispozitive
fizice, programe de calculator sau pot fi rezultatul unor reprezentri matematice
echivalente ale unor fenomene fizice sau abstracte.
Exist dou categorii de elemente tripoziionale:1. Elemente tripoziionale
fr histerezis; 2. Elemente tripoziionale cu histerezis.
n marea majoritate, n sistemele de reglare, elementul tripoziional
comnad un element de execuie cu caracter integrator, deobicei un servomotor
electric sau hidraulic, astfel c se asigur modificarea cu vitez consatant a
mrimii de execuie aplicat instalaiei tehnologice.
Mrimea de execuie poate rmne constant, poate crete sau scade cu
viteze constante de semne contrare, avnd valori n modul egale sau diferite.
2.3.1.1. Elemente tripoziionale fr histerezis
Dependena intrare-ieire este o funcie bine definit, reprezentat ca n Fig.2.3.1.
(2.3.3) x
'
X
1
, w < w
1
X
2
, w [w
1
, w
2
)
X
3
, w w
2
Un element tripoziional fr histerezis este un element nedinamic, adic
fr memorie sau de tip scalor.
)
w
1
w
2
x
X
1
X
2
X
3
w
[
[ )
Figura nr.2.3.1.
Implementarea numeric nseamn dou simple condiii de tip IF.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
38
2.3.1.2. Elemente tripoziionale cu histerezis
Dependena intrare-ieire n care,
, (2.3.4) w
1
w
2
w
3
w
4
este neunivoc aa cm se vede n Fig.2.3.2.
Restabilirea univocitii intrare-ieire se face prin introducerea unei
variabile de stare care poate lua trei valori, etichetate cumva, de exemplu (up,
down, rest) sau pot fi chiar valorile ( ). X
1
, X
2
, X
3
) [
) [
x
X
1
X
2
[
) [
) [
)
[ )
w
1
w
2
w
4
w
3
X
3
w
Figura nr.2.3.2.
Ecuaia de evoluie a ieirii, este o ecuaie funcional de forma,
(2.3.5) x(t)
'
X
1
, w(t) < w
1
X
2
, w(t) [w
2
, w
3
)
X
3
, w(t) w
4
x(t
) , w(t) { [w
1
, w
2
) [w
3
, w
4
) }
dac funcia este o funcie continu n timp. w(t)
Prin se nelege limita la stnga n punctul t. Cu alte cuvinte, dac x(t
)
intrarea la momentul t este atunci se pstreaz valoarea w(t) [w
1
, w
2
)
anterioar a ieirii care poate fi sau . Dac ns se x X
1
X
2
w(t) [w
3
, w
4
)
pstreaz valoarea anterioar a ieirii care poate fi sau . x X
2
X
3
Continuitatea funciei face ca trecerea valorii w dintr-un interval de w(t)
neunivocitate n altul s se fac prin intervalul n care se seteaz n mod [w
2
, w
3
)
univoc valoarea . X
2
Dac funcia este discontinu, ecuaia de evoluie trebuie scris sub w(t)
forma (2.3.7) n care s-a definit,
(2.3.6) w
0
w
2
+w
3
2
o valoare ce separ intervalele de neunivocitate,
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
39
x(t)
'
X
1
, w(t) < w
1
X
2
, w(t) [w
2
, w
3
)
X
3
, w(t) w
4
x(t
) , w(t) {[w
1
, w
2
) [w
3
, w
4
)} si [w(t) w
0
] [w(t
) w
0
] > 0
X
2
, w(t) {[w
1
, w
2
) [w
3
, w
4
) } si [w(t) w
0
] [w(t
) w
0
] 0
(2.3.7)
n caz contrar, este posibil rezultatul eronat n care, de exemplu, dac
, i iar ce ar face ca, pstrnd w(t
) [w
3
, w
4
) x(t
) X
3
w(t) [w
1
, w
2
)
valoarea anterioar a ieirii s se aloce , inaceptabil. x(t) X
3
Dac sau ramura respectiv este fr histerezis iar dac w
1
w
2
w
3
w
4
au loc ambele egaliti, caracteristica tripoziional este fr histerezis de forma
(2.3.3).
Dac sau se obine o caracteristic bipoziional cu X
1
X
2
X
2
X
3
histerezis.
Un program de implementare a unui element tripoziional cu histerezis
poate fi de forma,
Daca initializare
Citeste W1, W2,W3,W4,X1,X2,X3,X,Wold
W0=(W2+W3)/2
Altfel, la fiecare pas:
Citeste W
Daca W<W1, X=X1
Daca (W>= W2)&(W< W3), X=X2
Daca W>=W4, X=X3
Daca ((W>= W1)&(W< W2))V (W>= W1)&(W< W2))& ...
((W-W0)*(Wold-W0)<=0), X=X2
Wold=W
Scrie X
Se observ c dac se consider o implementare cu perioada de eantionare i T
i (w[kT] w
0
) (w[(k 1)T] w
0
) > 0 w(kT) {[w
1
, w
2
) [w
3
, w
4
)}
atunci nu se face nici-o actualizare i se menine valoarea anterioar a ieirii
. x[kT] x[(k 1)T]
Pentru demararea procedurii, n etapa de iniializare trebuie dat valoarea
iniial a ieirii dar i valoarea iniial a intrrii, pe parcurs folosind
, Wold w[(k 1)T]
deci sistemul este dinamic de ordinul doi deoarece sunt necesare dou informaii
iniiale.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
40
2.3.2. Exemplu de sistem tripoziional pentru reglarea temperaturii
2.3.2.1. Schema de principiu a sistemului
Se consider un sistem de reglare a temperaturii ntr-o incint termic
folosind un un dispozitiv ce realizeaz o caracteristic tripoziional cu histerezis,
prezentat n Fig.2.3.3.
Acesta este alctuit dintr-o prghie ce se poate roti ntr-un punct de
articulaie. La un capt are o pies feromagnetic ce se mic n cmpul magnetic
a dou bobine. O bobin este alimentat cu un curent constant, dar ajustabil, iar
cealalt cu un curent obinut de la un traductor de temperatur.
La cellalt capt, braul este prevzut cu dou contacte electrice ce pot
antrena un servomotor ntr-o direcie sau alta.
Exist poziii intermediare n care nici-un contact nu este nchis n care caz
servomotorul este oprit.
Servomotorul acioneaz un robinet de reglare ce controleaz debitul de
agent termic ce nclzete (sau poate rci) incinta termic.
Sensurile de rotaie sunt alese aa fel nct s se realizeze o reacie negativ
adic, dac temperatura crete, armtura metalic se deplaseaz ntr-o direcie
care nchide un contact ce face ca servomotorul s se roteasc aa fdel nct
variaia debitului de agent termic, determinat de rotaia servomotorului, s aib
efect invers, n cazul de fa s determine scderea temperaturii.
S
D
+
-
+
-
A
Incint termic
Pies
feromagnetic
Contacte
electrice
Motor electric
cu dou nfaurri
de excitaie serie
Resoarte
elastice
Amplificator
Surs de c.c.
Agent termic
Robinet de reglare
Figura nr.2.3.3.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
41
Dispozitivul de comand poate fi interpretata ca un obiect orientat cauzal
cu ieirea , starea contactelor electrice i intrarea temperatura notat x x(t)
. Dependena intrare-ieire este neunivoc de tip histerezis. y(t) (t)
Se constat, eventual experimental, c dac temperatura este mai mare
dect o valoare , atunci ntotdeauna se realizeaz un sens de rotaie
4
y(t) >
4
care determin scderea temperaturii. Se aloc pentru aceast stare a contactelor
valoarea . x(t) 1
Dac temperatura este mai mica sau egal cu o valoare , atunci
1
y(t)
1
ntotdeauna se realizeaz un sens de rotaie care determin cretera temperaturii.
Se aloc pentru aceast stare a contactelor valoarea . x(t) 1
Dac temperatura este simultan mai mica sau egal cu o valoare ,
3
i mai mare dect o valoare , atunci ntotdeauna y(t)
3
2
y(t) >
2
servomotorul este oprit. Se aloc pentru aceast stare a contactelor valoarea
. x(t) 0
Pentru o valoare a temperaturii ntre limitele, sau y(t) (t) [
1
,
2
)
se pstreaz starea anterioar a cotactelor adic . y(t) (t) [
3
,
4
) x(t) x(t
)
Valorile limit depind de parametrii de ajustare ai
1
2
3
4
dispozitivului electromecanic.
Aceast dependen intrare-ieire, reprezentat n Fig.2.3.4. , este o
dependen de tip histerezis "descresctoare", avnd n vedere ordinea dat de
valorile variabilei , i este exprimat concentrat n (2.3.8) x
(2.3.8) x(t)
'
1, y(t)
1
0, y(t) (
2
,
3
]
1, y(t) >
4
x(t
) , y(t) { (
1
,
2
] (
3
,
4
]}
Cu aceste precizri se poate nelege comportarea sistemului de reglare
reprezentat prin schema de principiu din Fig.2.3.3.
( ]( ]
x
1
2
3
4
X
11
X
2
0
X
3 1
(
]
( ]
( ]
( ]
Figura nr.2.3.3.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
42
2.3.2.2. Schema bloc general a sistemului
Sistemul descris mai sus se poate reprezenta printr-o schem bloc general
n care se evideniaz numai dou elemente: procesul condus i dispozitivul de
comand, ca n Fig.2.3.4.
ntre cele dou blocuri se evideniaz mrimea de execuie care n cazul de
fa este starea a contactelor. x
( ]
x y =
y =
Dispozitiv de comand
Proces condus
Mrimea de execuie:
Starea contactelor
Mrimea reglat:
Temperatura
Mrimea reglat:
Temperatura
Parametri:
1 2
;
Perturbaii: ext
y=
v
x
1
2
3
4
]
( ] ( ]
(
( ]
( ] 1
0
-1
Figura nr.2.3.4.
Schema bloc general evideniaz numai interaciunea dintre procesul
condus i dispozitivul de conducere precum i caracteristicile acestora mpreun
cu perturbaiile i parametrii de ajustare. n exemplul de fa se consider c
singura perturbaie este temperatura mediului extern .
ext
2.3.2.3. Schema bloc echivalent a sistemului
Sistemul de reglare se poate reprezenta printr-o schem bloc echivalent,
care are forma standard a unui sistem de reglare, n care se precizeaz n mod
explicit mrimea prescris i eroarea sistemului.
nacest scop se reprezint caracteristica dispozitivului de comand din
Fig.2.3.3. sau relaiile (2.3.8) ca un element tripoziional cu histerezis ca cel din
Fig.2.3.2. sau relaiile (2.3.5). n acest scop, considernd , se noteaz
3
2
(2.3.9) v
3
+
2
2
(2.3.10) v y
(2.3.11)
3
2
2
(2.3.12)
1
2
1
;
2
4
3
unde apare ca fiind o mrime prescris iar ca i eroare a sistemului n raport v
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
43
cu aceast mrime prescris; este jumtate din zona de insensibilitate iar
1
,
2
reprezint limile zonelor de histerezis pentru cele dou caracteristici laterale
bipoziionale.
Dac se noteaz
(2.3.13) w
1
1
; w
2
; w
3
; w
4
+
2
starea contactelor dispozitivului de comand este acum descris n raport cu
eroarea , exact prin relaiile (2.3.5) n care
w(t) (t) ; X
1
1; X
2
0; X
3
1
adic
(2.3.14) x(t)
'
1, (t) <
1
w
1
0, (t) [ , ) [w
2
, w
3
)
1, (t) +
2
w
4
x(t
) , (t) {[
1
, ) [ , +
2
)}
(2.3.15) {[
1
, ) [ , +
2
)} {[w
1
, w
2
) [w
3
, w
4
)}
ntr-adevr, de exemplu condiia
, y >
4
x 1
este echivalent cu succesiunea de condiii,
; ; v >
4
x 1 < v
4
x 1 <
2
x 1
deoarece, din relaiile (2.3.13)
i .
4
3
+
2
v
4
3
+
2
2
3
2
3
2
2
2
2
Avnd n vedere structura nfurrilor servomotorului electric, se poate
considera c acesta este comandat printr-o tensiune electric , ce ia un numr u(t)
finit de valori
(2.3.16) u(t) {U, 0, U}
numai datorit structurii dispozitivului de conducere.
n realitate servomotorul electric poate fi comanda i testat pentru orice
valori dintr-un interval. u(t)
Dac se efectueaz o testare a instalaiei la variaia treapt a curentului
, (2.3.17) u(t) u 1(t) u() 1(t)
considernd constant temperatura mediului exterior
, (2.3.18) p(t)
ext
(t)
ext
0
se obine rspunsul din Fig.2.3.5. pentru i t t
0
0 y
u
(t) y(t) p(t) 0, t <
(2.3.19) y
u
(t) y(t) p(t) K
1
K
1
T
2
T
1
[
t
T
2
(1 e
t
T
2
)] u() , t
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
44
u
(t)=y(t)
(t)
ext
0
0 t
0
t
0
t
t
u(t)
Val
u( )
2
T
Val{K}
T
1
u( )
Pant
K=K K
1 2
T
1
T
2
u( )
K
T
1
u( )
K
1
Figura nr.2.3.5.
Pe baza acestui rspuns se poate aproxima comportarea procesului condus
ca fiind descris de o funcie de transfer cu timp mort, , cu timpul mort la H
F
(s)
ieire
(2.3.20) Y(s)
ext
(s) + Y
u
(s) y(t)
ext
(t) + y
u
(t)
unde se disting:
* Componenta ieirii datorat variaiei mrimii de comand , Y
u
(s)
(2.3.21) Y
u
(s) H
F
(s) U(s)
* Funcia de transfer a prii fixe n raport cu mrimea de comand , H
F
(s)
(2.3.22) H
F
(s) H
1
(s) H
2
(s)
K
1
K
2
e
s
T
1
s (T
2
s + 1)
* Funcia de transfer a servomotorului electric mpreun cu reductorul mecanic
(2.3.23) H
1
(s)
K
1
T
1
s
(s)
U(s)
H
EE
(s)
Y
EE
(s)
U(s)
Ieirea acestuia este unghiul ce exprim poziia robinetului de (t) y
EE
(t)
reglare. Se observ c are caracter integrator, mai precis este un integrator pur.
* Funcia de transfer a instakaiei tehnologice i a traductorului
(2.3.24) H
2
(s)
K
2
T
2
s + 1
e
s
Y
u
(s)
(s)
Y
u
(s)
Y
EE
(s)
Cu aceste precizri, structura sistemului de reglare este reprezentat prin
schema bloc din Fig.2.3.6.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
45
w
1
w
2
+
+
+
y=
y=
v
(t)
ext
x(t)
u(t) = x(t)U
u(t)
U
K
1
T s
1
e
s
K
2
T s+1
2
(t)
(t)
x
)
[
)
[
[
) [
) [
)
[ )
w
3
w
4
1
0
-1
y =u
R
y (t)
R
p(t)
y (t)
EE
y(t)
EE IT+Tr
Figura nr.2.3.6.
Mrimea de comand realizat de dispozitivul de reglare sau legea de
reglare poate lua numai trei valori y
R
(t)
(2.3.25) Y
R1
(1) U U
(2.3.26) Y
R0
( 0) U 0
(2.3.27) Y
R2
( 1) U U
deci procesul condus cu intrarea , datorit relaieide conexiune u [U
min
, U
max
]
(2.3.28) u(t) y
R
(t)
este comandat numai prin trei valori
, (2.3.29) U
1
Y
R1
U
, (2.3.30) U
0
Y
R0
0
(2.3.31) U
2
Y
R2
U
i rezult structura de reglare tripoziionala standard, din Fig.2.3.9.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
46
2.3.3. Analiza comportrii unui sistem de reglare tripoziional
pentru un proces liniar cu timp mort
2.3.3.1. Schema bloc i traiectorii posibile
Reprezentrile analizate n exemplul anterior conduc la structura general,
din Fig.2.3.8., a unui sistem de reglare tripoziional a ieirii dintr-un proces liniar
de ordinul nti cu timp mort asupra cruia acioneaz numai o singur perturbaie
deplasat la ieire. p(t)
Legea de reglare realizeaz o comand tripoziional cu histerezis de tipul
"mai puin","mai mult" sau "deloc", dat de ecuaia de tranziie, considernd (t)
o funcie continu,
(2.3.32) y
R
(t)
'
Y
R1
, (t) < w
1
Y
R0
, (t) [w
2
, w
3
)
Y
R2
, (t) w
4
x(t
) , (t) {[w
1
, w
2
) [w
3
, w
4
)}
reprezentat n Fig.2.3.7.
) [
) [
[
) [
) [
)
[ )
w
1
w
2
w
4
w
3
Y
R1
Y
R0
Y
R2
y
R
Figura nr.2.3.7.
Aceasta nseamn aplicarea numai a trei comenzi la intrarea procesului
condus,
. (2.3.33) u(t) y
R
(t) {U
1
, U
0
, U
2
} ; U
1
Y
R1
; U
0
Y
R0
; U
2
Y
R2
De cele mai multe ori, n sistemele de reglare tripoziional, elementul de
execuie, EE, are caracter integrator avnd comanda median nul, . n U
0
0
cazul de fa se consider un element pur integratotr cu funcia de transfer,
(2.3.34) H
EE
(s)
K
1
T
1
s
Y
EE
(s)
U(s)
Instalaia tehnologic mpreun cu traductorul, IT+Tr, sunt descrise printr-o
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
47
funcie de transfer de ordinul nti cu timp mort la intrarea IT,
(2.3.35) H
2
(s)
K
2
T
2
s + 1
e
s
Y
u
(s)
Y
EE
(s)
Partea fix a sistemului este astfel,
(2.3.36) H
F
(s) H
EE
(s) H
2
(s)
K
1
K
2
e
s
T
1
s (T
2
s + 1)
e
s
H
F
(s)
w
1
w
2
+
+
+
p(t)
y(t)
y(t)
(t)
v(t)
y (t)=u(t)
R
Y
R1 1
U =
Y
R2 2
U =
U =Y
R0
0
y (t)
u
K
1
T s
1
e
s
K
2
T s+1
2
x
)
[
)
[
[
) [
) [
)
[ )
w
3
w
4
R1
y
R0
y
R1
y
y (t)
EE
EE IT+Tr
Legea de reglare Partea fix a sistemului
Figura nr.2.3.8.
Un sistem de reglare tripoziional poate fi intrepretat ca un sistem cu
structur variabil ce funcioneaz n regim de comutare n care se disting trei
structuri . S
1
, S
0
, S
2
Cele trei structuri, sunt determinate respectiv de aplicarea S
1
, S
0
, S
2
comenzilor , astfel c sunt posibile trei tipuri de traiectorii, respectiv U
1
, U
0
, U
2
: y
1
(t), y
0
(t), y
2
(t)
(2.3.37) S S
1
u U
1
y(t) y
1
(t) ; y
1
(t) p(t) + y
u1
(t) Y
1
(2.3.38) S S
0
u U
0
y(t) y
0
(t) ; y
0
(t) p(t) + y
u0
(t) Y
0
(2.3.39) S S
2
u U
2
y(t) y
2
(t) ; y
2
(t) p(t) + y
u2
(t) Y
2
Se consider c evoluia ntr-o anumit structur
S
i
, i 1, 0, 2
ncepe la un moment de timp
, (2.3.40) t t
i
, i 1, 0, 2
dintr-o valoare a strii prii fixe , valoare notat x
F
(t)
(2.3.41) x
F
i
x
F
(t
i
), i 1, 0, 2
n care se poate considera c se aplic o intrare
(2.3.42) u
i
(t) U
i
1(t t
i
), i 1, 0, 2
Pentru a utiliza ns convenabil instrumantul dat de transformarea Laplace,
se reprezint mrimile specifice structurii ntr-un timp deplasat S
i
t
i
(2.3.43) t
i
t t
i
, t t
i
dar care va fi notat, n cadrul unei aceleiai structuri tot cu litera . Cnd se t
reprezint evoluiile globale, se revine la timpul nedeplasat.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
48
Cu aceste convenii o traiectorie din structura este S
i
(2.3.44) S S
i
u U
i
y(t) y
i
(t) ; y
i
(t) p(t) + y
ui
(t) Y
i
, i 1, 0, 2
unde este compus din componenta sa liber , determinat de starea y
ui
(t) y
ui
liber
(t)
iniial n care ncepe evoluia n structura i o component forat x
F
i
S
i
y
ui
f
(t)
determinat, pentru fiecare , de intrarea i 1, 0, 2
. (2.3.45) u
i
(t) U
i
1(t) U
i
(s)
U
i
s
Componenta datorat procesului condus n structura este S
i
(2.3.46) y
ui
(t) y
ui
liber
(t) + y
ui
f
(t)
(2.3.38) y
ui
liber
(t) y
ui
liber
(t, x
F
i
)
. (2.3.47) y
ui
f
(t) L
1
{H
F
(s)
U
i
s
}
Dac s-ar pstra la nesfrit structura i perturbaia ar avea o valoare S
i
staionar
(2.3.48) P
st
t
lim p(t)
atunci traiectoria ar tinde ctre o valoare y
i
(t) Y
i
, (2.3.49) Y
i
t
lim y
i
(t)
considernd c totui mrimea de execuie , ieire dintr-un element integrator, y
EE
se satureaz la valori finite.
Valorile permit s se prezic evoluia n regim permanant a sistemului. Y
i
Evident c aceste valori depind de perturbaie astfel c tipul de regim permanent
se poate modifica.
Toate aceste traiectorii depind de structura actual care la rndul ei S
i
depinde de condiiile de comutare din legea de reglare tripoziional. Rspunsul
acestei legi depinde de mrimea prescris . v(t)
n concluzie, dac rspunsul intr ntr-un regim permanent, tipul de regim
permanent depinde de valorile perturbaiei i de valorile mrimii prescris p(t)
v(t)
2.3.3.2. Analiza comportrii prin explicitarea traiectoriilor de evoluie
Un sistem de reglare tripoziional este prin excelen un sitem liniar pe
poriuni. Ca i n cazul sistemelor bipoziionale, o posibilitate de analiz const n
reprzentarea tuturor familiilor de traiectorii posibile i corelarea acestora prin
condiiile de comutare determinate de elementul neliniar, n particular cu
histerezis.
n cazul de fa sunt posibile trei familii de traiectorii, (2.3.37)-(2.3.49). O
traiectorie specific din familie este generat de valoarea strii iniial . x
F
i
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
49
Sistemul de reglare este un sistem cu structur variabil n regim de comutare,
caracterizat prin evoluia continu n timp a strii procesului condus . x
F
(t)
Valoarea mrimii reglate ntr-un moment de comutare, ce evolueaz ntr-o
structur, considernd perturbaia o funcie continu, va fi valoarea iniial pentru
evoluia n structura urmtoare.
Se reprezint condiiile de comutare ale elememntului tripoziional cu
histerezis n funcie de valorile mrimii reglate , determinndu-se cinci zone y(t)
de evoluie ale mrimii reglate:
Zona de univocitate superioar ZUS
Este determinat de condiiile de comutare n care n mod univoc u U
1
(2.3.50) < w
1
v y < w
1
y > v w
1
u U
1
(2.3.37) y(t) Y
1
y ZUS y (v w
1
, )
Zona de univocitate inferioar ZUI
Este determinat de condiiile de comutare n care n mod univoc u U
2
(2.3.51) w
4
v y w
4
y v w
4
u U
2
(2.3.39) y(t) Y
2
y ZUI y (, v w
4
]
Zona de univocitate inferioar ZUM
Este determinat de condiiile de comutare n care n mod univoc u U
0
(2.3.51) [w
2
, w
3
) v w
3
< y v w
2
u U
0
(2.3.38) y(t) Y
0
y ZUM y (v w
3
, v w
2
]
Zona de histerezis superioar ZHS
Este determinat de zona de neunivocitate cu valorile Y
R1
, Y
R0
u U
1
, U
0
(2.3.52) [w
1
, w
2
) v w
2
< y v w
1
u(t) u(t
) y(t) Y
1,0
old
y ZHS y (v w
2
, v w
1
]
Zona de histerezis inferioar ZHI
Este determinat de zona de neunivocitate cu valorile Y
R2
, Y
R0
u U
2
, U
0
(2.3.53) [w
3
, w
4
) v w
4
< y v w
3
u(t) u(t
) y(t) Y
0,2
old
y ZHI y (v w
4
, v w
3
]
Se observ c mrimea prescris v este nsoit de limitele de comutare
. (2.3.54) v w
4
, v w
3
, v w
2
, v w
1
n exemplul anterior de reglare a temperaturii, aceste limite nreprezint,
. (2.3.55) v w
4
1
, v w
3
2
, v w
2
3
, v w
1
4
ntr-un sistem de reglare tripoziionala sunt posibile dou regimuri de
oscilaii ntreinute n jurul zonelor de histerezis ZHS i ZHI ce corespund unor
comportri de tip bipoziional. Se pot utiliza toate descrierile i relaiile din
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
50
paragraful 2.2. Sunt posibile n plus evoluii ctre zonele de histerezis i evoluii
libere n zona medie ZUM.
Cnd se aplic comanda median , mrimea de execuie se U
0
0 y
EE
menine constant i IT+Tr evolueaz din condiii iniiale nenule i sub influena
perturbaiilor. Aici s-a considerat o singur perturbaie . p(t)
Cnd se aplic comenzile mrimea de execuie are o variaie U
1
, U
2
y
EE
ramp ce trebuie s foreze evoluia mrimii reglat ctre valorile limit y
respectiv . Se poate dezvolta o analiz a compotrtrii asemntoare Y
min
, Y
max
celei efectuat la sistemele bipoziionale.
n Fig.2.3.9. sunt prezentate dou regimuri de tip bipoziional i o evoluie
asimptotic. Schimbarea regimului de funcionare a fost determinat de
modificarea valorii mrimii prescris.
Y
1
y
y y
R R2
Y
v -w
4
[
[
)
U
1
u=
U
1 u=
Y
2
y
U
2 u=
U
1 u=
U
0 u=
t
R0
Y y
R
yv -w
2
v -w
3
y >
B
C
D
E
F
G
H
I
J
K
L
M
N
P
O
y(t)
Y
1
2
Y
A
y>
y
R R1
Y
v -w
1
Y
0
1
w v-
2
w v-
3
w
v-
4
w v-
v=v1
1
w v-
2
w v-
3
w
v-
4
w
v-
v=v2
1
w v-
2
w v-
3
w
v-
4
w
v-
v=v3
)
Y y
U
0 u=
Y
1
2
Y
Y
0 1
w v-
2
w v-
3
w
v-
4
w v-
Oscilaii n ZHS
(
,
]
>
Y
1
2
Y
Y
0
1
w v-
,
] 2
w v-
3
w
v-
4
w v-
Oscilaii n ZHI
(
>
Y
1
Y
0 1
w v-
1
w v-
2
w v-
(
,
]
Evoluie asimptotic
>
y ZUS
y ZUI
y ZHS
y ZHS
y ZHS
y ZHI
y ZHI
y ZHI
y ZUM
y ZUM
Figura nr.2.3.9.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
51
2.3.3.3. Analiza comportrii prin reprezentarea traiectoriilor n spaiul
strilor
Ca orice sistem liniar pe poriuni i sistemul de reglare tripoziional poate
fi analizat prin reprezentarea traiectoriilor n spaiul strilor sau fazelor, pe scurt
prin portretul de faz considernd c perturbaiile au valori constante.
De exemplu, considernd un caz particular n care:
, (2.3.56) T
1
1; T
2
T ; 0; p(t) 0; v const
i legea de reglare tripoziional fr histerezis, caracterizat prin
(2.3.57) w
1
w
2
; w
3
w
4
(2.3.58) U
1
1; U
0
0; U
2
1
sistemul din Fig.2.3.8. are structura din Fig.2.3.10.
0
1
-1
K
s(Ts+1)
v
y(t) u(t)
u
Figura nr.2.3.10.
n cazul de fa, procesul condus este descris prin ecuaia diferenial de
ordinul doi,
. (2.3.59) T
y (t)+
y (t) K u(t)
Substituind
, (2.3.60) v y;
y ;
y
se obine ecuaia diferenial n eroare,
(2.3.61) T
(t)+
(t) K u(t)
ce poate fi reprezentat prin variabilele de faz
(2.3.62) x
1
y; x
2
x
1
deci,
(2.3.63)
x
1
x
2
(2.3.64) T
x
2
x
2
K u(t)
Traiectoriile de faz sunt soluiile ecuaiei difereniale
(2.3.65) T
dx
2
dx
1
x
2
+K u(t)
x
2
Pentru structura n care , traiectoriile sunt reprezentate prin S
0
u(t) 0
drepte descresctoare,
(2.3.66) T x
2
x
1
+C; C T x
2
(t
0
) + x
1
(t
0
)
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
52
Pentru structurile
(2.3.67) S
1
: u U
(2.3.68) S
2
: u U
n care
(2.3.69) x
2
+ K u 0
traiectoriile sunt exprimate prin relaiile,
(2.3.70) T [x
2
+ K u ln(x
2
+K u)] x
1
+ C
n care se substituie
. (2.3.71) u U; u U
Pentru
(2.3.72) x
2
K u
traiectoriile sunt drepte orizontale
n Fig.2.3.11. este schiat portretul de faz al sistemului de reglare pe baza
cruia se deduc traiectoriile realizate din diferite condiii iniiale.
=x
1
.
=x
2
- K
K
Figura nr.2.3.11.
Se observ c deoarece caracteristica tripoziional este fr histerezis nu
apar regimurile oscilante menionate la cazul general.
2. SISTEME CU NUMR FINIT DE VALORI 2.3. Sisteme de reglare tripoziional
PENTRU MRIMEA DE COMAND cu caracteristic de tip histerezis
53
2.4. Legi de reglare tripoziional cu elemente n reacie
2.4.1. Lege de reglare tripoziional cu element dinamic n reacie
Avantajul elementelor tripoziionale l constituie simplitatea elementelor de
comand care realizeaz amplificarea de putere.
Un sistem care are drept lege de reglare numai o caracteristic
tripoziional, nu asigur ntotdeauna performane satisfctoare.
Din aceasta cauz se folosete o lege de reglare continu , de H
R
(s)
exemplu de tip PID, conectat n serie cu o structur n circuit nchis ce
simuleaz amplificatorul de putere.
Aceasta este alctuit dintr-o caracteristic tripoziional care are n reacie
un element liniar aa cum este ilustrat n Fig.2.4.1. H
r
(s)
ntre mrimea de comand analogic generat de legea de reglare y
c
(t)
continu i mrimea generat de elementul de pe reacie , H
R
(s) q(t) H
r
(s)
structura nseamn un sistem de reglare tripoziional exact ca cel analizat n
paragraful precedent.
Mrimea de comand aplicat la elementul de execuie poate lua y
R
(t)
numai trei valori din care cauz elementul de execuie EE are Y
R1
, Y
R0
, Y
R2
caracter integrator.
4
w
+ +
-
v
r
H (s)
r
H (s)
R
y
c
y =u
R
EE EE
y
K
1
s
Lege de
reglare PID
Partea fix Regulator
Instalaia
tehnologic
i traductorul
y=r w
q
q(t)
y
R
1
w
R1
Y
R2
Y
R0
Y
2
w
3
w
w
EE
Figura nr.2.4.1.
Se poate aproxima, foarte grosier sau "n mare", caracteristica
tripoziional ca nsemnnd o amplificare deoarece n anumite zone, A
variaii aproape nule ale intrrii dau variaii finite la . w(t) y
R
(t)
n aceast aproximare, structura cu element n reacie realizeaz o funcie
de transfer ntre i y
c
y
R
cnd (2.4.1) Hy
c
y
R
(s)
1
1
A
+H
r
(s)
1
H
r
(s)
A
2. SISTEME CU NUMR FINIT DE VALORI 2.4. Legi de reglare tripoziional
PENTRU MRIMEA DE COMAND cu elemente n reacie
54
Daca elementul din reacie este aperiodic
(2.4.2) H
r
(s)
K
Ts + 1
atunci, ntre i se realizeaz grosier sau "n mare" lege de tip PI, dac y
c
y
EE
elementul de execuie este integrator
(2.4.3) H
EE
(s)
K
1
s
adic
(2.4.4) Hy
c
y
EE
(s)
1
H
r
(s)
H
EE
(s)
Ts +1
K
K
1
s
K
1
T
K
Ts + 1
Ts
PI
n Fig.2.4.2. sunt ilustrate evoluiile exacte ale mrimilor
cnd mmrimea are variaii treapt. q(t) , y
R
(t) , y
EE
(t) y
c
(t)
Modalitatea de analiz este identica cu cea prezentat n paragraful 2.3.
Se consider
(2.4.5) Y
R1
< 0, Y
R0
0, Y
R2
> 0
astfel c mrimea de execuie este o succesiune de segmente cu pante y
EE
(t)
pozitive, negative sau nule.
Evoluiile mrimii de ieire din elementul integrator dau o mai bun
aproximaie a variaiilor ieirii dac s-ar utiliza numai elemente analogice.
Pentru a pune n eviden caracterul aproximativ de tip PI a conexiunii
dintre structura cu element tripoziional cu reacie i elementul de execuie
integrator, n Fig.2.4.3. se prezint, cu mai puine detalii, rspunsul acestei
coneiuni avnd ca intrare i ca ieire . y
c
(t) y
EE
(t)
Se poate determina expresia legii de reglare PI echivalent H
R
ech
(s)
, (2.4.6) H
R
ech
(s) K
R
ech
T
I
ech
s +1
T
I
ech
s
aa cum este ilustrat i n Fig.2.4.4.
Evident c, dac funcia de transfer are alte expresii atunci legea de H
r
(s)
reglare echivalent este de alt tip. H
R
ech
(s)
De exemplu, dac pe reacie se folosete un element proporional,
(2.4.7) H
r
(s) K
atunci se obine comportarea aproximativ n mare
(2.4.8) Hy
c
y
EE
(s)
1
K
K
1
s
H
R
ech
(s) K
R
ech
1
T
I
ech
s
cu o lege de reglare de tip I. Dac i elementul de execuie este proporional
(2.4.9) H
EE
(s) K
1
atunci ntre i comportarea este aproximat printr-un element y
c
(t) y
EE
(t)
proporional ce nseamn de fapt echivalentul unui amplificator de putere
2. SISTEME CU NUMR FINIT DE VALORI 2.4. Legi de reglare tripoziional
PENTRU MRIMEA DE COMAND cu elemente n reacie
55
. (2.4.10) Hy
c
y
EE
(s)
1
K
K
1
H
R
ech
(s) K
R
ech
Se pot dezvolta proceduri de proiectare a unor astfel de sisteme n sensul c
se determin, folosind metodele obinuite, expresia legii de reglare compus
(2.4.11) H
R
(s) H
R
(s) H
R
ech
(s)
din care sededuc i . Ultima expresie este folosit pentru a calcula H
R
(s) H
R
ech
(s)
i parametrii caracteristicii tripoziional cu histerezis. H
r
(s)
U
1 u=
t
4
w y -
c
1
w y -
c
2
w y -
c
3
w y -
c
y
c
4
w y -
c
1
w y -
c
2
w y -
c
3
w y -
c
y
c
0
Y
y
R
[
]
q y -w
c 2
q
y -w
c 3
0
Y
y
R
[
]
qy -w
c 2
q
y -w
c 3
[
q
2
Y
y
R
y -w
c 4
[
q
2
Y y
R
y -w
c 4
4
w y -
c
1
w y -
c
2
w y -
c
3
w y -
c
y
c
B
C
D
E
F
G
H
I
J
K
L
M
N
P
O
q(t)
2
KY
1
KY
0
KY
A
]
q
y
R 1
Y
y -w
c 1
]
q
y
R 1
Y
y -w
c 1
R2
Y
R1
Y
R0
Y
t
t
y
R
y
EE
1
Y
0
Y
2
Y
<0
=0
>0
H (s)
r
K
Ts+1
=
Figura nr.2.4.2.
2. SISTEME CU NUMR FINIT DE VALORI 2.4. Legi de reglare tripoziional
PENTRU MRIMEA DE COMAND cu elemente n reacie
56
3
w y -
c
y
c
y
c
q(t)
y
EE
y
EE
t
t
PI
y
c
4
w y -
c
4
w y -
c
1
w y -
c
1
w y -
c
2
w y -
c
2
w y -
c
3
w y -
c
3
w y -
c
2
KY
KY
0
KY
KY
H (s)
r
K
Ts+1
=
Figura nr.2.4.3.
y
EE
y
c
y
c
t
t
y
c
y
c
K
R
ech
.
y
c
K
R
ech
T
I
ech
.
Pant
Figura nr.2.4.4.
2. SISTEME CU NUMR FINIT DE VALORI 2.4. Legi de reglare tripoziional
PENTRU MRIMEA DE COMAND cu elemente n reacie
57
2.4.2. Lege de reglare tripoziional cu reacie dup mrimea de
execuie
Dac mrimea de execuie se poate msura folosind un traductor cu y
EE
factorul de proporionalitate atunci acest semnal este ponderat cu un factor K
3
K
3
i se aplic o corecie q(t)
q(t) K
3
K
3
y
EE
(t)
la intrarea n elementul tripoziional, aa cum este ilustrat n Fig.2.4.5.
3
w
+ +
-
v
r
H (s)
R
y
c
y =u
R
EE EE
y
K
1
s
K'
3
K''
3
H (s)=
r
K
1
s
K'
3
K''
3
Lege de reglare PID
Traductor
Partea fix Regulator
Instalaia
tehnologic
i traductorul
principal
y=r w
1
w
2
Y
4
w
y
R
0
Y
1
Y
2
w w
q
Figura nr.2.4.5.
Comportarea ntre mrimea i mrimea este exact cea din paragraful y
c
y
R
2.4.1 n care
H
r
(s) K
3
K
3
K
1
s
K
3
K
1
s
unde s-a notat,
. K
3
K
3
K
3
Conform relaiei (2.4.4), dependena dintre i mrimea este y
c
y
EE
Hy
c
y
EE
(s)
1
H
r
(s)
H
EE
(s)
s
K
3
K
1
K
1
s
1
K
3
P
adic aceea a unui element proporional.
Scopul structurii alctuit din caracteristica tripoziional cu reacie dup
ieirea din elementul de execuie este de a reproduce valoarea analogic y
c
(t)
generat de legea de reglare . H
R
(s)
Acest bloc realizeaz aproximativ comportarea unui amplificator analogic
de putere, care este foarte scump, prin comenzile cu pant constant realizat de
servomotorul de tip integrator.
Cu un astfel de servomotor, de exemplu motor electric i reductoare de
turaie, se pot realiza cupluri foarte mari ce acioneraz, evident nu aa de rapid,
instalaii de putere mare.
2. SISTEME CU NUMR FINIT DE VALORI 2.4. Legi de reglare tripoziional
PENTRU MRIMEA DE COMAND cu elemente n reacie
58
O astfel de structur se numete VMD (Valve Motor Drive), i este des
folosit n practic.
Dac mrimea de ieire din elementul de execuie nu poate fi y
EE
msurat, structura VMD poate fi implementat folosind n locul acesteia
mrimea de ieire din modelul matematic al elementului de execuie, aa y
EE
mod
cum este ilustrat n Fig.2.4.6.
Un exemplu al modului n care mrimea aproximeaz evoluia y
EE
(t)
mrimii este prezentat n Fig.2.4.7.formelor de y
c
(t)
3
w
+ +
-
v
r
H (s)
R
y
c
y =u
R
EE EE
y
K
1
s
K
3
Lege de reglare
PID
Partea fix Regulator
Instalaia
tehnologic
i traductorul
principal
y=r w
K
1
s
mod EE
y
mod
K'
3
K''
3
K
3
=
.
q
H (s)=
r
K
1
s
K'
3
K''
3
mod
1
w
2
Y
4
w
y
R
0
Y
1
Y
2
w w
Figura nr.2.4.6.
3
w y -
c
4
w y -
c
y
c
y
c
y
EE
y
EE
1
w y -
c
2
w y -
c
t
y =Y
R
2
y =Y
R
1
y =Y
R
0
Pant pozitiv
Pant negativ
Pant nul
Figura nr.2.4.7.
2. SISTEME CU NUMR FINIT DE VALORI 2.4. Legi de reglare tripoziional
PENTRU MRIMEA DE COMAND cu elemente n reacie
59
2.5. Realizarea cu amplificatoare operaionale a legilor
bipoziionale i tripoziionale
2.5.1. Realizarea unei caracteristici bipoziional cu histerezis,
descresctoare
Se folosete o structur cu amplificator operaional (AO) prevzut cu un
circuit de reacie pe intrarea neinversoare, ca n Fig.2.5.1.a., reprezentnd de fapt
un trigger de tip Shmitt clasic.
-
+
u
1
R
1
R
2
R
3
R
4
u
2
i
i
i
3
u
d
y
w
i
i
=0
u
1
u
2
y
A
u
1
u'
1
u''
1
Y
max
Y
min
y
v
a)
b)
c)
Figura nr.2.5.1.
Tensiunea aplicat la borna inversoare apare ca mrime de intrare iar u
1
tensiunea aplicat la borna neinversoare asigur ajustarea limitelor de comutare u
2
prin care se realizeaz caracteristica descresctoare din Fig.2.5.1.b. u
1
, u
1
Valorile reprezint tensiunile de saturaie inferioar i superioar Y
min
, Y
max
a AO i depind de tensiunile de alimentare.
Elementul bipoziional realizat, privit ca obiectorientat intrare-ieire, este
reprezentat prin schema bloc echivalent din Fig.2.5.1.c. n care se evideniaz
rolul tensiunilor n raport cu ieirea . u
1
, u
2
y
Dependena intrare-ieire este descris prin trei ecuaii algebrice obinute
prin aplicarea teoremelor lui Kirckoff n circuitul de mai sus, cu notaiile din
Fig.2.5.1.a.,
(2.5.1) u
1
u
d
+ w 0 ; u
2
+ R
3
i
3
+ w 0 ; i
3
u
2
y
R
3
+R
4
din care se deduce tensiunea la intrarea AO, u
d
, (2.5.2) u
d
u
1
+ (1 ) u
2
+ y
unde
. (2.5.3)
R
3
R
3
+ R
4
Presupunem c circuitul se afl n starea astfel c ecuaia (2.5.2) y Y
max
are forma,
. (2.5.4) u
d
u
1
+ (1 ) u
2
+ Y
max
2. SISTEME CU NUMR FINIT DE VALORI 2.5. Realizarea cu amplificatoare operaionale a
PENTRU MRIMEA DE COMAND legilor bipoziionale i tripoziionale
60
Aceast stare se menine atta timp ct
. (2.5.5) u
d
u
1
+ (1 ) u
2
+ Y
max
> 0
Circuitul va comuta de la spre valoarea atunci cnd, y Y
max
y Y
min
datorit modificrii tensiunii de intrare sau a tensiunii de ajustare , tensiunea u
1
u
2
la intrarea AO, , dat de ecuaia (2.5.4), va fi zero, adic u
d
, u
d
0 u
1
+ (1 ) u
2
+ Y
max
0 u
1
u
1
. (2.5.6) u
1
(1 ) u
2
+ Y
max
n acest moment i ecuaia (2.5.2) devine y Y
min
. (2.5.7) u
d
u
1
+ (1 ) u
2
+ Y
min
Starea se menine atta timp ct y Y
min
(2.5.8) u
d
u
1
+ (1 ) u
2
+ Y
min
< 0
n mod simetric, circuitul va comuta de la spre valoarea y Y
min
y Y
max
atunci cnd, datorit modificrii tensiunii de intrare sau a tensiunii de ajustare u
1
, tensiunea la intrarea AO, , dat acum de ecuaia (2.5.7), va fi zero, adic u
2
u
d
u
d
0 u
1
+ (1 ) u
2
+ Y
min
0 u
1
u
1
(2.5.9) u
1
(1 ) u
2
+ Y
min
Se observ c cele dou valori ale tensiunii la care circuitul comut sunt u
1
diferite, ceea-ce nseamn de fapt apariia fenomenului de histerezis. u
1
< u
1
Se definesc, valoarea median , ce poate fi interpretat ca i valoare v
prescris ntr-un sistem de reglare, dac circuitul este folosiut n acest scop, i
limea lateral a zonei de histerezis.
Rezultatele finale, prezentate grupat sunt:
(2.5.10)
R
4
R
3
(2.5.11)
R
3
R
3
+ R
4
1
1 +
(2.5.12) u
1
(1 ) u
2
+ Y
min
(2.5.13) u
1
(1 ) u
2
+ Y
max
(2.5.14) v
u
1
+ u
1
2
(1 ) u
2
+
Y
max
+ Y
min
2
(2.5.15)
u
1
u
1
2
Y
max
Y
min
2
Se observ c parametrii caracteristicii cu histerezis, depind de u
1
, u
1
tensiunile i de raportul al rezistenelor i . Y
min
, Y
max
R
4
R
3
n proiectare, pentru un raport dorit , se aleg acele valori care R
3
, R
4
satisfac anumite cerine ale comportrii circuitului electronic.
2. SISTEME CU NUMR FINIT DE VALORI 2.5. Realizarea cu amplificatoare operaionale a
PENTRU MRIMEA DE COMAND legilor bipoziionale i tripoziionale
61
2.5.2. Realizarea unei caracteristici bipoziional cu histerezis,
cresctoare
n acest caz se folosete o aceeai structur cu amplificator operaional
(AO) prevzut cu un circuit de reacie pe intrarea neinversoare, ca n Fig.2.5.2.a.,
identic cu cea anterioar numai c tensiunea , aplicat la borna neinversoare, u
2
apare ca mrime de intrare iar tensiunea , aplicat la borna inversoare, asigur u
1
ajustarea limitelor de comutare prin care se realizeaz caracteristica u
2
, u
2
cresctoare din Fig.2.5.2.b.
-
+
u
1
R
1
R
2
R
3
R
4
u
2
i
i
i
3
u
d
y
w
i
i
=0
u
1
u
2
y
A
u
2
u'
2
u''
2
Y
max
Y
min
y
v
a)
b)
c)
Figura nr.2.5.1.
Elementul bipoziional realizat, privit ca obiect orientat intrare-ieire, este
reprezentat prin schema bloc echivalent din Fig.2.5.2.c. n care se evideniaz
rolul tensiunilor n raport cu ieirea . u
1
, u
2
y
Ecuaiile electrice sunt identice iar procedura de rezolvare a sistemului de
ecuaii este asemntoare.
Se obin urmtoarele rezultate:
(2.5.16)
R
4
R
3
(2.5.17)
R
3
R
3
+ R
4
1
1 +
(2.5.18) u
2
1
1
u
1
1
Y
max
(2.5.19) u
2
1
1
u
1
1
Y
min
(2.5.20) v
u
2
+ u
1
2
1
1
u
1
1
Y
max
+ Y
min
2
. (2.5.21)
u
1
u
1
2
1
Y
max
Y
min
2
2. SISTEME CU NUMR FINIT DE VALORI 2.5. Realizarea cu amplificatoare operaionale a
PENTRU MRIMEA DE COMAND legilor bipoziionale i tripoziionale
62
2.5.3. Modaliti de realizare a elementului de comparaie n
sistemele de reglare cu caracteristici bipoziionale
Regulatoarele industriale n care caracteristicile bipoziionale sunt realizate
cu amplificatoare operaionale, prezint la ieire starea unor contacte electrice
ataate unui releu electromagnetic comandat de ctre circuitul cu AO printr-un
tranzistor de putere ca n figurile de mai jos.
Se conecteaz i o diod pentru evitarea efectului tensiunilor de
autoinducie la blocarea tranzistorului de putere.
Astfel de regulatoare se numesc regulatoare bipoziionale sau de tip on-off.
Regulatoarele universale pot avea o facilitate de funcionare bipoziional. i
acestea vor fi referite n continuare pe scurt regulatoare bipoziionale.
Din punct de vedere al realizrii elementului de comparaie se deosebesc:
1. Regulatoare n care elementul de comparaie este realizat n mod explicit.
O astfel de structur este prezentat n Fig.2.5.2.
2. Regulatoare n care elementul de comparaie este implicit, rezultnd din
interpretarea caracteristicii bipoziional, aa cum s-a prezentat n exemplul
2.2.2. O astfel de structur este prezentat n Fig.2.5.3.
+
v
r
A
"ref"
"mas"
Element de comparaie
explicit
v
r
A
"ref"
"mas"
Element de comparaie
implicit
Figura nr.2.5.2. Figura nr.2.5.3.
O modalitate de realizare explicit a elementului de comparaie n
sistemele cu semnal unificat intensitate de curent, este prezentat n Fig.2.5.4.
v
r
A
"ref"
"mas"
u
r
u
u
v
R
R
Figura nr.2.5.4.
2. SISTEME CU NUMR FINIT DE VALORI 2.5. Realizarea cu amplificatoare operaionale a
PENTRU MRIMEA DE COMAND legilor bipoziionale i tripoziionale
63
Aceast structur este des ntlnit n echipamentele de automatizare.
Un exemplu l constituie regulatorul ELX 75, produs n Romania, care
folosete un nregistrator transmitor cu rol multiplu de msurare a mrimii
reglate i de generare a unui curent folosit n realizarea elementuului de
comparaie, aa cum este ilustat n Fig.2.5.5.
v
A
"ref"
u
u
ref
u
mas
u
mas
R
Surs
curent
de
nregistrator
transmitor
Regulatorul ELX75
x
0 1
Figura nr.2.5.5.
Dei regulatorul ELX 75 nu se mai fabric, acest principiu de realizare a
elementului de comparaie pentru regulatoarele bipoziionale este universal i
utilizat n multe echipamente care se produc n mod curent.
2. SISTEME CU NUMR FINIT DE VALORI 2.5. Realizarea cu amplificatoare operaionale a
PENTRU MRIMEA DE COMAND legilor bipoziionale i tripoziionale
64
2.5.3. Modaliti de realizare a caracteristicilor tripoziionale
Dei caracteristicile tripoziionale se pot realiza n mod independent, de
foarte multe ori se utilizeaz dou elemente bipoziionale care se interconecteaz
pentru a rezulta un element tripoziional.
Un exemplu l constituie regulatorul tripoziional ELX176 produs n
Romania. Acest regulator, cu semnal unificat intensitate de curent, este alctuit
din dou regulatoare bipoziionale ce pot funciona n mod independent cu
variabilele de ieire respevtiv . x
1
{ 0, 1} x
2
{ 0, 1}
Conectarea regulatoarelor bipoziionale lor n serie din punct de vedere
electric, ce corespunde aplicrii unui acelai semnal de intrare, permite realizarea
unei caracteristici tripoziionale cu histerezis n care mrimea de ieire
x f(x
1
, x
2
) {1, 0, 1}
exprim starea unor contacte care permit acionri de tipul {up, down, rest}.
O astfel de interconexiune este ilustrat n Fig.2.5.6. ce realizeaz
caracteristicile din Fig.2.5.7.
A
A
"mas 1 +"
"mas 2 +"
"mas 1 -"
"mas 2 -"
u
1
u
2
u
mas1
i
mas2
i
mas1
u
ref1
u
mas2
u
ref2
R
R
Surs
curent
de
Surs
curent
de
Regulatorul ELX 176
x1
x2
x
1
x
2
w
4
w
3
w
1
w
2
i
mas2
i
mas1
0
0
1
1
w
4
w
3
w
1
w
2
0
1
x
-1
i
mas2
i
mas1
=
Figura nr.2.5.6. Figura nr.2.5.7.
2. SISTEME CU NUMR FINIT DE VALORI 2.5. Realizarea cu amplificatoare operaionale a
PENTRU MRIMEA DE COMAND legilor bipoziionale i tripoziionale
65
2.6. Sisteme cu modulare n durat de impulsuri (PWM)
2.6.1. Reprezentarea procesului de modulare n durat de impulsuri
Sistemele cu modulare n durat de impulsuri sunt sisteme care conin cel
puin un element denumit Modulator n durat de impulsuri PWM (Pulse
With Modulator).
1
Un element PWM efectueaz operaia (procesul) de modulare n durat de
impulsuri, prescurtat tot prin simbolul PWM (Pulse With Modulation).
Un element PWM primete la intrare un semnl continual i y
c
(t) , y
c
R
furnizeaz un tren de impulsuri , ca n Fig.2.6.1. cu o perioad x(t) , x { 0; 1}
de repetiie dar avnd durata unui impuls dependent de valoarea T
0
k
a semnalului continual de intrare, numai n momentele . y
c
(kT
0
) t k T
0
Utilizarea numai a valorilor din anumite momente de timp exprim
echivalent existena unui proces de eantionare reprezentat prin elmentul de
eantionare din Fig.2.6.1.
y (kT )
c 0
Modulator
n durat de
PWM
x(t)
x(t)
y (t)
c
y (t)
c
impulsuri Semnal
Semnal
continual
continual
Tren de
Tren de
impulsuri
impulsuri
T
0
ir de
valori
Generator
de
impulsuri
k
k+1
( )
y
c
y
c Y
max
c
Y
min
c
0
T
0
T
0
T
0
kT
0
(k+1)T
0
0
1
x(t)
t
Figura nr.2.6.1. Figura nr.2.6.2.
Semnalul de ieire din modulator este deci,
(2.6.1) x(t)
'
1, t (kT
0
, kT
0
+
k
]
0, t (kT
0
+
k
, (k + 1)T
0
]
t (kT
0
, (k +1)T
0
]
(2.6.2)
k
[y
c
(k T
0
)]
Deoarece durata impulsurilor este restricionat la domeniul
, (2.6.3)
k
[0, T
0
]
funcia (2.6.2), exprimat ca i caracteristic static,
, (2.6.4) (y
c
)
are caracter de saturaie la valoarea respectiv . 0 T
0
n particular, ntre limitele de saturaie dependena semnal continual- durata
1
Paragraful 2.6. este preluat din cartea C.Marin, Structuri i legi de reglare automat,
Editura Universitaria, 2001.
2. SISTEME CU NUMR FINIT DE VALORI 2.6. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND durat de impulsuri
66
impulsurilor este o dreapt astfel c se exprim (2.6.4), ca n Fig.2.6.2., prin
relaia
(2.6.5) (y
c
)
'
0 , y
c
< Y
min
c
K y
c
+B , y
c
Y
min
c
, Ymax
c
1
]
T
0
, y
c
> Y
max
c
unde,
, (2.6.6) K
T
0
Ymax
c
Y
min
c
(2.6.7) B
T
0
Ymax
c
Y
min
c
Y
min
c
Elementele PWM sunt des folosite n sistemelede reglare automat
deoarece realizeaz o comand de tip bipoziional pentru care elementul de
execuie este foarte simplu, putnd fi implementat prin simple contacte
electromecanice. O astfel de comand mai este denumit i "Comand
proporional n timp" (Time Proportional Command) deoarece durata
impulsurilor este proporional cu valoarea din anumite momente de timp x(t)
a semnalului de intrare. t kT
0
y
c
Intervalul de timp , dac este constant, se numete i perioada ciclului T
0
de modulare.
n Fig.2.6.3. este ilustrat un exemplu de evoluie intrare-ieire a unui
element PWM la care . Y
min
c
0, Y
max
c
1
(
] ( 1 ( ]
(
(
]
] (
( (
( ( (
]
]
]
] ]
]
. . . .
t
0
0
x(t)
x(t)
0
6T
0
5T 0
4T
0
3T
0
2T
0
0.25T
0
0.75T 0
0.75T
0
1.00T
0 1.00T
0 0.50T
0
1T
1.00
0.75
0.50
0.25
0
t
y (t)
c y (t)
c
y (5T )=0.75
c
0
y (4T )=1.00
c
0
y (3T )=1.00
c 0
y (2T )=0.75
c 0
y (1T )=0.50
c
0
y (0T )=0.25
c
0
0
6T
0
5T
0
4T
0
3T 0
2T
0
0T
0
1T
Figura nr.2.6.3.
2. SISTEME CU NUMR FINIT DE VALORI 2.6. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND durat de impulsuri
67
Dei ieirea dintr-un PWM este un semnal continual , totui informaia x(t)
despre mrimea de intrare este concentrat numai n valorile duratelor ca
k
rezultate ale unui proces de eantionare.
Tratarea teoretic exact a sistemelor n care apar elemnte de tip PWM se
poate efectua numai folosind teoria sistemelor cu eantionare neconvenionale ce
va face obiectul unui capitol separat.
Exist mai multe varinte de reprezentare sistemic a generatorului de
impulsuri din Fig.2.6.1.
2.6.2. Exemplu de sistem de reglare cu element de comand de tip
PWM
Majoritatea echipamentelor numerice de reglare automat i chiar circuitele
integrate de tip micro-controller, au o ieire de tip PWM.
Din punct de vedere fizic, ieirea de tip PWM este materializt prin dou
borne la care se aplic fie o tensiune ce poate lua numai dou valori, fie un
contact electromecanic care poate fi nchis sau deschis.
Din punct de vedere sistemic ns, ieirea din modulator este semnalul x(t)
, care reprezint fie o tensiune n voli (i utilizat ca atare) fie valoarea unei
variabile logice binare atat strii celor dou borne.
Valoarea mrimii este dat de relaii deforma (2.6.1), (2.6.2), n care x(t)
este o mrime continual obinut eventual dintr-o lege de reglare continu. y
c
(t)
Se consider o incint la care temperatura este comandat prin
o
C
aplicarea unei tensiuni cu valoarea eficace la bornele unei u(t) [0, U
max
]
rezistene . R
Modificarea valorii n mod continuu n domeniul , folosind u(t) [0, U
max
]
un transformator reglabil sau un redresor comandat, este o soluie scump care
uneori nu se justific economic.
O soluie eficient const n realizarea controlului instalaiei prin nchiderea
i deschiderea unor contacte electrice care aplic o tensiune, cu valoarea eficace
, la bornele rezistenei . De exemplu , valoare U
ef
U
max
R U
ef
U
max
220V
eficace.
Se utilizeaz n acest scop bornele PWM ale unui regulator, ca n
Fig.2.6.4., la care este furnizat variabila , dependent de mrimea de x { 0, 1}
ieire dintr-o lege de reglare continual. y
c
Schema de conectare este prezentat n Fig.2.6.4. considernd c ntre
bornele 20 i 21, de exemplu, regulatorul ca aparat fizic, prezint un contact
electromecanic a crui stare este reprezentat prin variabila . x
2. SISTEME CU NUMR FINIT DE VALORI 2.6. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND durat de impulsuri
68
~
~
x
21
20
U
max
u(t)
R
o
C
Contactor electromagnetic
sau static
REGULATOR
reprezentat
ca i aparat
INCINT
TERMIC
Contact
electromecanic
Figura nr.2.6.4.
Se realizeaz astfel un sistem de reglare cu schema bloc din Fig.2.6.5.,
Lege
de reglare
continual
H (s)
F
H (s)
IT
H (s)
R
v(t) e(t) u(t)
x(t)
r(t)=y(t)
y(t)
_
+
...
p
q
p
1
Partea fix a sistrmului
y (t)
c
PWM
U
max
Traductor
Instalaie
tehnologic
(t)
y (t)
IT
Figura nr.2.6.5.
n care se consider elemenul PWM nglobat n partea fix a sistemlui cu
mrimea de reacie . r(t) y(t)
Mrimea fizic de intrare n instalaia tehnologic este tensiunea care, u(t)
din cauza modulatorului n durat de impulsuri, poate lua numai dou valori
(comand bipoziional) ,
. (2.6.8) u { 0; U
max
}
Instalaia ar putea fi comandat i liniar, aplicndu-se la intrare oricare
valoare a tensiunii eficace . u [0, U
max
]
Astfel definit instalaia tehnologic, se poate determina modelul ei
matematic, de exemplu prin testare la variaie treapt, ca n Fig.2.6.6. Valorile
pot fi oarecare sau numai . u
1
, u
2
u
1
0, u
2
U
max
Dac se obine un rspuns ca n Fig.2.6.6., instalaia tehnologic poate fi
exprimat prin modelul matematic liniar cu funcia de transfer
. (2.6.9) H
IT
(s)
(s)
U(s)
K
IT
e
0
s
T
IT
s +1
Datorit comenzilor bipoziionale (2.6.8), ieirea din instalaia tehnologic
are o form oscilant, cu o perioad , n jurul unei valori medii, notat y
IT
(t) T
0
, ca n Fig.2.6.7. y
IT
2. SISTEME CU NUMR FINIT DE VALORI 2.6. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND durat de impulsuri
69
u(t) (V)
u = u - u
1 2
u
1
u
2
T
IT
2
2
1
= y [ C]
IT
o
K =
u
IT
V
o
C
Figura nr.2.6.6.
Rip
Rip
y (t)
IT
T0 T0 T0
t
y (t)
IT
_
y (t)
IT
_
y (t)
IT
Figura nr.2.6.7.
O problem important const n alegerea valorii ciclului . Cerinele T
0
privind valoarea lui sunt contradictorii i anume: T
0
Dac se urmrete obinerea unor oscilaii fa de valoarea medie ct mai
mici trebuie ca s fie ct mai mic posibil. T
0
Dac se urmrete protejarea elementului de execuie i a releului din
regulator, trebuie ca s fie ct mai mare. T
0
Totui, o valoare prea mare pentru poate conduce la pierderea unor T
0
evoluii mai rapide ale mrimii , aa cum exagerat se prezint n Fig.2.6.3. y
c
(t)
O posibilitate de analiz i sintez a sistemelor care conin PWM const n
aproximarea comportrii modulatorului n durat de impulsuri prin modele
continue liniare sau neliniare.
Reprezentarea sistemic echivalat prin modele continue a modulatorului
n durat de impulsuri se face n conjuncie i cu modul n care se realizeaz
comanda instalaiei tehnologice (precizarea foarte clar a mrimii de execuie).
2. SISTEME CU NUMR FINIT DE VALORI 2.6. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND durat de impulsuri
70
2.6.3. Reprezentarea echivalent a procesului PWM prin mediere n
timp
O metod des folosit pentru aproximarea comportrii modulatorului n
durat de impulsuri printr-un model continuu este de a aproxima semnalul de
ieire printr-un semnal constant pe durata unei perioade i de valoare x(t) x(t) T
0
egal cu valoarea medie a semnalului pe acea perioad, x(t)
, (2.6.9) x(t)
1
T
0
kT
0
kT
0
+T
0
x()d
1
T
0
[1
k
] t (kT
0
, (k +1)T
0
]
care, pentru caracteristica (2.6.5) conduce la,
x(t)
'
0 , y
c
(kT
0
) < Y
min
c
(K y
c
(kT
0
) +B)/T
0
, y
c
(kT
0
)
Y
min
c
, Y
max
c
1
]
1 , y
c
(kT
0
) > Y
max
c
t (kT
0
, (k +1)T
0
]
sau (2.6.10)
. (2.6.11) x(t)
'
0 , y
c
(kT
0
) < Y
min
c
y
c
(kT
0
) Y
min
c
Y
max
c
Y
min
c
, y
c
(kT
0
)
Y
min
c
, Y
max
c
1
]
1 , y
c
(kT
0
) > Y
max
c
t (kT
0
, (k +1)T
0
]
Deci, atunci cnd se exprim, y
c
(kT
0
)
Y
min
c
, Y
max
c
1
]
, . (2.6.12) x(t)
y
c
(kT
0
) Y
min
c
Y
max
c
Y
min
c
t (kT
0
, (k +1)T
0
]
Aceleai valori constante pe poriuni se pot exprima i pentru semnalul u(t)
, care se aplic n realitate instalaiei sub form de impulsuri.
Dac se consider numai cazul , se obine y
c
(kT
0
)
Y
min
c
, Ymax
c
1
]
u(t)
1
T
0
kT
0
(k+1)T
0
u()d
1
T
0
[U
max
k
] U
max
x(t), t (kT
0
, (k +1)T
0
]
Deci, (2.6.13)
(2.6.14) Se u(t) U
max
y
c
(kT
0
) Y
min
c
Y
max
c
Y
min
c
, t (kT
0
, (k+ 1)T
0
]
observ c
, (2.6.15) u(t) U
max
x(t) , t R
astfel c se poate utiliza reprezentarea echivalent din Fig.2.6.8. n care apare
grupul eantionator - extrapolator de ordinul zero nseriat cu un element neliniar
care transform valoarea extrapolat n valoatea medie , constant pe y
c
e0
(t) x(t)
un interval . t (kT
0
, (k + 1)T
0
]
2. SISTEME CU NUMR FINIT DE VALORI 2.6. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND durat de impulsuri
71
y (t)
IT
Lege
de reglare
continual
H (s)
IT
H (s)
R
e(t)
...
p
q
p
1
y (t)
c
PWM
U
max
Instalaie
tehnologic
y (kT )
c 0
T
0
T
0
ir de
valori
Mediere
n timp
y (t)
c
e0
x(t) u(t)
Model echivalent al
Figura nr.2.6.8.
n aceast reprezentare, pe lng pierderea de informaie datorit utilizrii
numai a eantioanelor (care este inerent utilizrii unui modulator) apare y
c
(kT
0
)
o aproximare prin aceea c n locul impulsurilor de perioad cu durat u(t) T
0
k
i amplitudine se consider semnale constante pe tot intervalul i avnd U
max
T
0
valoarea medie . u(t)
O structur continual liniar ce aproximeaz comportarea PWM se obine astfel:
1. n locul grupului eantionator - extrapolator de ordinul zero, cu perioada se T
0
consider un element de ntrziere cu durata . n felul acesta, n locul T
0
/2
semnalului extrapolat se va considera un semnal neted ntrziat cu y
c
e0
(t) y
c
(t)
durata fa de semnalul de intrare , T
0
/2 y
c
(t)
(2.6.16) y
c
(t) y
c
(t T
0
/2) Y
(s) e
(T
0
/2)s
Y
c
(s)
aa cum este justificativ ilustrat n Fig.2.6.9.
2. Elementul neliniar de mediere, dat de relia (2.6.11), care realizeaz semnalul
continual constant pe poriuni , se nlocuiete prin conexiunea de elemente x(t)
liniare care realizeaz semnalul continual neted x
(t)
(2.6.17) x
(t)
y
c
(t) Y
min
c
Y
max
c
Y
min
c
K
c
(t) + x
0
unde, (2.6.18) K
1
Y
max
c
Y
min
c
(2.6.19) x
0
Y
min
c
Y
max
c
Y
min
c
3. Se definete n mod asemntor semnalul neted de intrare
. (2.6.20) u
(t) U
max
x
(t) (U
max
K
) y
c
(t T
0
/2) +(U
max
x
0
)
4. Se definete diferena dintre mrimea de intrare
, u(t) U
max
x(t)
care este un tren de impulsuri, i semnalul neted de intrare prin mrimea u
(t)
(2.6.21) u(t) u(t) u
(t)
ca fiind un zgomot cu perioada fundamental care preia diferenele dintre T
0
semnalul efectiv aplicat instalaiei tehnologice i semnalul neted generat u(t) u
(t)
de modelul liniar ce aproximeaz comportarea PWM.
2. SISTEME CU NUMR FINIT DE VALORI 2.6. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND durat de impulsuri
72
0 T 2T 3T 4T 5T 6T 7T
0
0 0 0 0 0 0
T /2
0
T /2 0
t
y (t)
c
y (t)
c
( ]
( ]
( ]
( ]
( ]
( ]
( ]
( ]
y (t)
c
y (t)
c
Y (s) c
y (kT )
c 0
T
0
T
0
ir de
valori
y (t)
c
e0
y (t)
c
e0
y (t)
c
e0
~
y (t)
c
~
y (t)
c
Grupul SH
Model liniar aproximativ
Model exact
T
0
- s
e
Y (s) c
~
c
T /2 0 y (t- )
~
y (t)
c
=
Figura nr.2.6.9.
Aceste echivalri permit reprezentarea, ca n Fig.2.6.10., a modelului liniar
aproximstiv al modulatorului n durat de impulsuri PWM, n care se consider i
sistemul de contacte, notat MLA PWM+BC. Din punct de vedere fizic, la
instalaia tehnologic se aplic o comand reprezentat prin mrimea , care ia u(t)
numai valorile i , dar care apare ca fiind generat prin u(t) 0 u(t) U
max
semnalul neted la care se adun "zgomotul" . u
(t) u(t)
y (t)
c
+
+
U
max
K
~
e
s
0 T
2
. .
U
max
~
x
0
u(t)
.
+
y (t)
IT
y (t)
IT
H (s)
IT
H (s)
IT
...
...
p
q
p
q
p
1
p
1
y (t)
c
y (t)
c
U
max
Instalaie
Instalaie
tehnologic
tehnologic
~
y (t) c
~
x(t)
~
u(t)
Modelul liniar aproximativ al PWM i al blocului de contacte
K
~
+ +
+ +
~
x
0
u(t)
u(t)
u(t)
e
s
0 T
2
MLA PWM+BC
MLA PWM+BC
Figura nr.2.6.10.
Sistemul de reglare din Fig.2.6.5. este reprezentat acum n Fig.2.6.11.
Lege
de reglare
continual
H (s)
F
H (s)
IT
H (s)
R
v(t) e(t) u(t) r(t)=y(t)
y(t)
_
+
... p
q
p
1
Partea fix a sistrmului
Traductor
Instalaie
tehnologic
(t)
y (t)
IT
+
+
U
max
K
~
e
s
0
T
2
. .
U
max
~
x
0
u(t)
.
+
y (t)
c
MLA PWM+BC
Figura nr.2.6.11.
2. SISTEME CU NUMR FINIT DE VALORI 2.6. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND durat de impulsuri
73
2.7. Sisteme cu modulare n frecven de impulsuri (PFM)
2.7.1. Reprezentarea procesului de modulare n frecven de
impulsuri
Sistemele cu modulare n frecven de impulsuri sunt sisteme care conin
cel puin un element denumit Modulator n frecven de impulsuri PFM (Pulse
Frequency Modulator).
Un element PFM efectueaz operaia (procesul) de modulare n frecven
de impulsuri, prescurtat tot prin simbolul PFM (Pulse Frequency Modulation).
El primete la intrare un semnl continual i furnizeaz un tren de y
c
(t) , y
c
R
impulsuri , ca n Fig.2.7.1. cu o durat constant i o x(t) , x {1; 0; 1}
0
perioad de repetiie
, (2.7.1) T T
k
1/f
k
dependent de valoarea a semnalului continual de intrare, numai n y
c
(t
k
)
momentele astfel nct t t
k
. (2.7.2) t
k+1
t
k
+ T
k
, k 0
Valoarea nenul a impulsurilor are semnul egal cu semnul abaterii
y
c
(t
k
) y
c
(t
k
) Y
0
c
a mrimii de intrare fa de o valoare nominal . y
c
(t
k
) Y
0
c
Utilizarea numai a valorilor din anumite momente de timp exprim
echivalent existena unui proces de eantionare reprezentat prin elmentul de
eantionare neuniform n momentele din Fig.2.7.1. t
k
Modulator
n frecven de
PFM
x(t)
x(t)
y (t)
c
y (t)
c
impulsuri Semnal
Semnal
continual
continual
Tren de
Tren de
impulsuri
impulsuri
t
k
y ( )
c
t
k
ir de
valori
Generator
de
impulsuri
( )
y
c
f
t
k+3
t
k+4
0
0
y
c
Y
max
c
Y
0
c
Y
min
c
k
T
k+2
T
k+3
T
k+1
T
1
x(t)
t
f
min
max
=
1
T
f
max
min
=
1
T
t
k+1
t
k
t
k+2
0
0
-1
y
c
Y
0
c
y
c
Y
0
c
<
Figura nr.2.7.1. Figura nr.2.7.2.
2. SISTEME CU NUMR FINIT DE VALORI 2.7. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND frecven de impulsuri
74
Semnalul de ieire din modulator este deci,
(2.7.3) x(t)
'
sign[y
c
(t
k
)] , t (t
k
, t
k
+
0
] &T
k
0
0 , t (t
k
+
0
, t
k
+T
k
] &T
k
0
0 , t (t
k
, t
k
+ T
k
] &T
k
<
0
unde frecvena impulsurilor la pasul k este definit prin relaia,
, (2.7.4) f f
k
1
T
k
[y
c
(t
k
)]
iar deviaia a mrimii de intrare la pasul k, fa de o valoare y
c
(t
k
) y
c
(t
k
)
nominal este, Y
0
c
. (2.7.5) y
c
(t
k
) y
c
(t
k
) Y
0
c
Se consider funcia dat prin relaia, sign[y
c
]
, (2.7.6) sign[y
c
]
'
1, y
c
< 0
0, y
c
0
1, y
c
> 0
. (2.7.7) y
c
y
c
Y
0
c
Funcia (2.7.4), exprimat ca i caracteristic static,
, (2.7.8) f
1
T
(y
c
)
are caracter de saturaie n afara valorilor limit
, . (2.7.9) f
min
1
T
max
f
max
1
T
min
n particular, dac valoarea nominal este mijlocul domeniului Y
0
c
, adic [Y
min
c
, Y
max
c
]
, (2.7.10) Y
max
c
Y
0
c
Y
0
c
Y
min
c
Y
max
c
i ntre limitele de saturaie dependena semnal continual-frecvena impulsurilor
este o dreapt, se exprim (2.7.6), ca n Fig.2.7.2., prin relaia
(2.7.11) f
1
T
(y
c
)
'
f
max
, y
c
(, Y
min
c
) (Y
max
c
, )
K y
c
Y
0
c
+ f
min
, y
c
Y
min
c
, Ymax
c
1
]
unde,
, (2.7.12) K
f
max
f
min
Ymax
c
Y
0
c
T
max
T
min
T
max
T
min
(Ymax
c
Y
0
c
)
2. SISTEME CU NUMR FINIT DE VALORI 2.7. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND frecven de impulsuri
75
2.7.2. Exemplu de sistem de reglare cu element de comand de tip
PFM
Elementele PFM sunt folosite n sistemele de reglare automat unde
elementul de execuie EE are caracter integrator. PFM realizeaz o comand de
tip tripoziional astfel c fiecrui impuls i corespunde o variaie cu o cuant , u
bine precizat, a ieirii din EE. u
De exemplu elementele de execuie de tip motor pas cu pas sunt prin
excelen comandate cu PFM.
Ca i n cazul PWM, se pot deduce o serie de modele continuale care s
aproximeze comportarea PFM. Modele exacte se obin foflosind teoria sistemelor
cu eantionare neconvenional, care va face obiectul unui capitol separat.
n Fig.2.7.3. este prezetat schema bloc a unui sistem n care elementul de
execuie de tip integrator, cu funcia de transfer
, (2.7.13) H
EE
(s)
K
E
T
E
s
este comandat printr-un element de tip PFM.
Lege
de reglare
continual
H (s)
F
H (s)
IT
H (s)
R
v(t) e(t) u(t) x(t) r(t)=y(t)
y(t)
_
+
...
p
q
p
1
Partea fix a sistrmului
y (t)
c
PFM H (s)
EE
Traductor
Instalaie
tehnologic
y (t)
IT
H (s) =
EE
K
E
T
E
.
s
Element de execuie de tip integrator
Figura nr.2.7.3.
Dac durata impulsurilor generate de PFM este atunci, la fiecare
0
impuls, mrimea de execuie are o variaie de la momentul pn la u(t) t t
k
momentul egal cu o cuant unde, t t
k
+
0
u
k
. (2.7.14) u
k
sign[y
c
(t
k
)]
K
E
T
E
0
a
k
0
(2.7.15) a
k
sign[y
c
(t
k
)]
K
E
T
E
Expresia n domeniul timp a mrimii de execuie este, u(t)
(2.7.16) u(t)
'
u(t
k
) + a
k
(t t
k
) , t (t
k
, t
k
+
0
]&T
k
0
u(t
k
) + a
k
0
, t (t
k
+
0
, t
k
+ T
k
] &T
k
0
u(t
k
) , t (t
k
, t
k
+ T
k
] &T
k
<
0
2. SISTEME CU NUMR FINIT DE VALORI 2.7. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND frecven de impulsuri
76
astfel c valoarea n momentul este t t
k+1
. (2.7.17) u(t
k+1
) u(t
k
) + u
k
n Fig.2.7.4. este ilustrat o astfel de evoluie.
0
k
T
k
T
k+2
T
k+3
T
k+4
T
k+1
T
k+1
T
1
x(t)
t
t
t
t
k+1
t
k+1
t
k+1
t
k-1
t
k-1
t
k-1
t
k
t
k
t
k
t
k+2
t
k+2
t
k+2
t
k+3
t
k+3
t
k+4
t
k+4
t
k+4
t
k+3
0
0
0
0
0
0
0
-1
Y
max
c
Y
0
c
Y
min
c
y
c
y
c
= (t)
u=u(t)
k
T
u k
u
k
u
k
k+1
T
u
k
pant
pant
u(t)
~
Figura nr.2.7.4.
n cazul utilizrii unor motoare pas cu pas ca i elemnte de execuie, mrimea de
execuie are o variaie n momentul egal cu o cuant u(t) t t
k
u
k
(2.7.18) u
k
sign[y
c
(t
k
)] c
unde este o mrime independent de durata , find specific motorului i c
0
sistemului su de angrenaje.
Pentru elementele de execuie motoare pas cu pas ieirea are forma,
(2.7.19) u(t)
'
u(t
k
) + u
k
, t (t
k
, t
k
+T
k
] &T
k
0
u(t
k
) , t (t
k
, t
k
+T
k
] &T
k
<
0
Unind, pe fiecare interval , punctele prin segmente [ t
k
, t
k+1
] u(t
k
) , u(t
k+1
)
de dreapt a cror pant este
, (2.7.20) u
k
u(t
k+1
) u(t
k
)
T
k
u
k
T
k
u
k
f
k
se obine o curb ce aproximeaz comportarea unui elemnt integrator u
(t)
echivalent.
2. SISTEME CU NUMR FINIT DE VALORI 2.7. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND frecven de impulsuri
77
Deoarece n zona de liniaritate, cnd , frecvena dat y
c
Y
min
c
, Y
max
c
1
]
f
k
de (2.7.11) este
f
k
K y
c
Y
0
c
+ f
min
K y
c
(t
k
) + f
min
i innd cont de (2.7.14), n cazul unor elemente de execuie de tip integrator,
panta curbei pe un interval de timp este u
(t) t (t
k
, t
k
+ T
k
]
u
k
u
k
f
k
sign[y
c
(t
k
)]
K
E
T
E
0
(K y
c
(t
k
) +f
min
)
adic (2.7.21) u
k
K
y
c
(t
k
) + B
unde , . (2.7.22) K
K
E
T
E
0
K B
sign[y
c
(t
k
)]
K
E
T
E
0
f
min
Notm prin diferena dintre comanda efectiv aplicat (2.7.16) i (t)
mrimea de ieire neted dintr-un integrator a crui intrare este mrimea w(t)
. (2.7.23) w
.
(t) K
y
c
(t) +B
Se interpreteaz ca fiind un zgomot, ce preia diferena de netezime, (t)
(2.7.24) (t) u(t) w(t)
Un model liniar aproximativ al PFM cu element de execuie integrator, MLA
PFM+EE, al sistemului de reglare din Fig.2.7.3., este prezentat n Fig.2.7.5.
Lege
de reglare
continual
H (s)
F
H (s)
R
v(t) e(t)
u(t)
r(t)=y(t)
y(t)
_
+
... p
q
p
1
Partea fix a sistrmului
Instalaie
tehnologic
+ +
-
+ + +
K
~
B
~
y (t)
c
MLA PFM+EE
Y
0
c
y (t)
c
traductor
i
1
s
u(t)
~
(t)
Figura nr.2.7.5.
2. SISTEME CU NUMR FINIT DE VALORI 2.7. Sisteme cu modulare n
PENTRU MRIMEA DE COMAND frecven de impulsuri
78
3. SISTEME MULTIVARIABILE DE REGLARE AUTOMAT
3.1. Structuri de reglare automat multivariabil
Majoritatea instalaiilor industriale au mai multe intrri, mai multe ieiri
ntre care exist interaciuni dinamice.
Considerarea unor bucle de reglare separate pentru fiecare ieire nu asigur
performane satisfctoare deoarece o bucl de reglare pertub celelalte bucle.
In sinteza unor astfel de sisteme trebuie s se in cont de caracterul
multivariabil al instalaiei.
3.1.1. Exemplu de sistem multivariabil
La o instalaie de amestec a dou fluide ntr-un rezervor trebuie reglat
temperatura amestecului i nivelul amestecului n rezervor. h
Dac se regleaz temperatura prin modificarea cursei ventilului iar u
F1
nivelul prin modificarea cursei ventilului , schema de automatizare se prezint u
F2
ca n Fig.3.1.1.
TT
{y}
LT
{y}
h
TC
{y}
LC
{y}
p
1
1
v
1
q
1
p
2
2
v
2
q
2
q
3
u
1 F
u
2 F
u
3 F
2 R
H
1 R
H
Figura nr.3.1.1.
Perturbaiile n aceast instalaie sunt: presiunile amonte p1, p2 n
conductele de alimentare, temperaturile ale celor doua fluide i cursa a
1
,
2
u
F3
ventilului de evacuare. Schema bloc a sistemului de reglare este prezentat n
Fig.3.1.2.
Se observ c, datorit interaciunii prin instalaie, comenzile pentru
ndeplinirea sarcinii de reglare ntr-o bucl constituie perturbaii pentru cea de-a
doua bucl. S-au considerat perturbaiile deplasate la ieire.
3. SISTEME MULTIVARIABILE 3.1. Structuri de reglare automat
DE REGLARE AUTOMAT multivariabil
79
v1
v2
U
U
y
y
y
y
y
y
p p p
U U
p
G(s)
H
H
H
H
H
H
H
1
2
F1
F2
1
F12
1
1
2p
F21
1 2 2 2 1 1
p
12
2 F3 F3
1
F11
F21
F12
F22
R2
R1
F
p=(
(s)
(s)
(s)
)
T
h
h
h
21
p
Figura nr.3.1.2.
Definind vectorii :
v
v
1
v
2
1
]
1
, y
h
1
]
1
, p
p
1
p
2
2
u
F3
1
]
1
1
1
1
1
, u
F
u
F1
u
F2
1
]
1
,
2
1
]
1
, y
p
p
h
p
1
]
1
i matricele
H
R
(s)
H
R1
(s) 0
0 H
R2
(s)
1
]
1
, H
F
(s)
H
F11
(s) H
F12
(s)
H
F21
(s) H
F22
(s)
1
]
1
(3.1.1) G(s) G
ij
(s)
i1,2
j1,2,3,4,5
,
astfel c schema bloc din Fig.3.1.2. se transcrie matriceal ca n Fig.3.1.3.
H (s)
F
H (s)
R
G(s)
V(s)
E(s) Y(s) U (s)
F
P(s)
-
+ +
+
Figura nr.3.1.3.
3. SISTEME MULTIVARIABILE 3.1. Structuri de reglare automat
DE REGLARE AUTOMAT multivariabil
80
Rspunsul sistemului n circuit nchis este
(3.1.2) Y(s) H
v
(s)V(s) + H
p
(s)P(s)
unde:
(3.1.3) H
v
(s) H
d
(s) [I +H
d
(s)]
1
[I +H
d
(s)]
1
H
d
(s)
este matricea de transfer n circuit nchis n raport cu mrimea impus,
(3.1.4) H
d
(s) H
F
(s) H
R
(s)
este matricea de transfer in circuit deschis,
(3.1.5) H
p
(s) [I + H
d
(s)]
1
G(s)
este matricea de transfer n circuit nchis n raport cu perturbaia.
3.1.2. Structur de reglare multivariabil nedecuplat
Structura din Fig.3.1.2., n care se folosete cte un singur regulator pentru
fiecare ieire iar matricea are o form diagonal, constituie aa numita H
R
(s)
structur n variant nedecuplat intrare-ieire a unui SRA multivariabil.
Intr-o astfel de structur, modificarea mrimii de referin a unei bucle
afecteaz i cealalte bucle.
De exemplu, referina a primei bucle afecteaz i bucla a doua prin v
1
mrimea echivalent care apare ca o perturbaie pentru a doua bucl i h
21
reciproc, modificarea referinei afecteaza i prima bucl prin mrimea v
2
echivalent .
12
Dac buclele de reglare asigur erori staionare de pozitie nule, ,
1
() 0
adic i au caracter integrator, se realizeaz o decuplare
2
() 0 H
R1
(s) H
R2
(s)
n regim staionar, n sensul c fiecare ieire va avea, n regim staionar, valoarea
referinei corespunzatoare.
O asftel de decuplare este satisfctoare pentru sistemele de stabilizare
automat, nu i pentru cele de urmrire sau de reglare dup program.
Interpretnd sistemul ca fiind compus din dou bucle separate, se poate
realiza separat sinteza pentru fiecare bucl avnd ins, pe lnga perturbaia
natural echivalat la ieire, pentru prima bucl respectiv pentru a doua
p
h
p
bucl, i perturbaia datorat buclei complementare, respectiv
12
y
F12
, ca n Fig.3.1.4. h
21
y
F21
Sinteza primei bucle de reglare, pentru a asigura o comportare dorit n
raport cu mrimea impus innd cont de efectul celei de a doua bucle, se v
1
realizeaz pe structura echivalent din Fig.3.1.5. unde s-au considerat,
, , . v
2
0 h
p
0
p
0
3. SISTEME MULTIVARIABILE 3.1. Structuri de reglare automat
DE REGLARE AUTOMAT multivariabil
81
1
v
1
y
F12
12
y
1p
p
H
R1
(s) H
F11
(s)
u
F1
y
1
+
-
+
+ +
+
2
v
2
H
R2
(s)
F22
H
(s)
u
F2
y
2
h
y
2p
p
h y
F21
21
h
+
-
+
+ +
+
Figura nr.3.1.4.
n aceast structur se consider c sistemul are drept parte fixat funcia
de transfer,
(3.1.6) H
F1
(s) H
F11
(s) H
F21
(s)
H
R2
(s)
1 +H
R2
(s)H
F22
(s)
H
F12
(s)
1
v
1
H
R1
(s) H
F11
(s)
u
F1
y
1
+
-
+
+
F21 H
(s)
F12 H
(s)
F22
H
(s)
+
-
H
R2
(s) -
Figura nr.3.1.5.
3.1.3. Structur de reglare multivariabil decuplat
Structura complet de reglare multivariabil o constituie aa numita
structur n variant decuplat intrare-ieire n care se asigur decuplarea
(independena) att in regim staionar ct i n regim tranzitoriu ntre o referin i
celelalte ieiri, altele dect cea corespunztoare acelei referine.
n varianta decuplat, matricea de transfer n circuit nchis are form H
v
(s)
diagonal pe cnd matricea legii de reglare poate avea toate elementele H
R
(s)
nenule.
De exemplu, o structur cu dou intrari i dou iesiri care asigur
decuplarea intrare-ieire este prezentat n Fig.3.1.6.
3. SISTEME MULTIVARIABILE 3.1. Structuri de reglare automat
DE REGLARE AUTOMAT multivariabil
82
H
R21
(s) H
F21
(s)
H
F21
(s)
H
R11
(s) H
F11
(s)
H
R12
(s)
H
R22
(s)
H
F22
(s)
_
+
_
+
+
+
+
+
+
+
+
+
+
+
+
+ U
F1
( s)
2
V
1
(s)
V
2
(s)
1
( s)
U
F2
Y
1
(s)
Y
2
(s)
H
F
(s) H
R
(s)
(s)
1p
Y
2p
(s) Y
Figura nr.3.1.6.
In aceast structur se poate asigura o matrice de transfer n circuit nchis
sub form diagonal, prin care se exprim decuplarea dinamic H
v
(s)
(3.1.7) H
V
(s)
H
V11
0
0 H
V11
1
]
1
, H
R
(s)
H
R11
(s) H
R12
(s)
H
R21
(s) H
R22
(s)
1
]
1
3.1.4. Reglarea combinat n sistemele multivariabile
Ca i n cazul sistemelor monovariabile, se poate realiza compensarea
efectului unei perturbaii prin corecii n funcie de acea perturbaie corecii ce se
aplic la marimea prescris sau la marimea de comand.
n Fig.3.1.7. se prezint o structur cu corecii la ieirea din legea de
reglare principal echivalent cu corecii aplicate la intrarea n partea fix.
H (s)
Fp
H (s)
F
H (s)
R
V(s)
E(s) Y(s) U (s)
F
P(s)
-
+
+ +
+ +
F(s)
Figura nr.3.1.7
Acest tip de corecie impune un element de compensare cu matricea de
transfer,
F(s) = H
F
(s)
-1
H
Fp
(s) (3.1.8)
iar corecia la marimea prescris impune
F(s) = H
V
(s)
1
H
p
(s) (3.1.9)
3. SISTEME MULTIVARIABILE 3.1. Structuri de reglare automat
DE REGLARE AUTOMAT multivariabil
83
3.1.5. Sistem automat multivariabil cu bloc de reglare n reacie
n aceste sisteme blocul de reglare primete la intrare mrimea msurat i
furnizeaz mrimea de reacie ca n Fig.3.1.11.
H
F
(s)
V(s)
Y(s)
Y
R
(s)
R(s)
(s)
+
-
Figura nr.3.1.11.
Matricea de transfer n circuit nchis este
H
V
(s)=H
F
(s)[I + R(s)H
F
(s)]
-1
= [I + R(s)H
F
(s)]
-1
H
F
(s) (3.1.10)
Dac H
V
(s) i H
F
(s) sunt inversabile,
H
V
(s)
-1
=H
F
(s)
-1
+ R(s) , (3.1.11)
permite calculul rapid al matricei de reglare R(s),
R(s)=H
V
(s)
-1
- H
F
(s)
-1
(3.1.12)
In particular, dac H
V
(s) i H
F
(s) se pot exprima sub forma
H
V
(s) =N(s)/L(s) , H
F
(s)=N(s)/L
F
(s) (3.1.13)
unde L(s) i L
F
(s) sunt polinoame iar N(s) este o matrice polinomial sau
raional, atunci
R(s)=[L(s) - L
F
(s)]N(s)
-1
(3.1.14)
Structura de mai sus poate fi echivalat printr-o structur cu reacie liniar
dup stare. Dac H
F
(s) si H
V
(s) au caracter inerial, R(s) are un puternic caracter
derivator. Mrimea de reacie Y
R
(s) poate fi realizat eventual folosind
anumite componente msurabile ale vectorului de stare al instalaiei, structura
putnd fi echivalat cu un sistem cu reacie dupa stare.
Exemplu:
H
F
(s)
100
s+10
10
s+10
5
s+1
1
s+1
1
]
1
1
1
, H
V
(s)
2
s+2
0
0
0.2
s+0.2
1
]
1
1
1
(H
V
(0) I)
R(s) = H
V
(s)
1
H
F
(s)
1
s+2
2
0
0
s+0.5
0.5
1
]
1
1
1
s+10
50
(s+1)
5
(s+10)
10
2(s +1)
1
]
1
1
1
R(s)
0.8(0.6s +1) 0.2(s + 1)
0.1s + 1 1
1
]
1
3. SISTEME MULTIVARIABILE 3.1. Structuri de reglare automat
DE REGLARE AUTOMAT multivariabil
84
3.2. Calculul sistemelor multivariabile de reglare automat
3.2.1. Algoritmul Truxall de sintez a sistemelor de reglare
multivariabil decuplat
Calculul unui sistem de reglare multivariabil se poate efectua urmnd
algoritmul Truxall de sintez, bazat pe repartiia poli-zerouri, prin parcurgerea
urmatoarelor etape:
1. Se precizeaz structura sistemului de reglare (varianta decuplat sau
nedecuplat ) n funcie de:
-gradul de interaciune dintre mrimile de intrare i ieire
-nivelul de tehnologie utilizat n aparatura de automatizare
-numrul de intrri i ieiri
-importana instalaiei automatizate.
2. Se determin matricea de transfer a prii fixate (considernd c H
F
(s)
au fost alese traductoarele i elementele de execuie), determinnd, eventual
experimental, componentele acestei matrici prin utilizarea tehnicilor i metodelor
de la sistemele monovariabile
(3.2.1) H
Fij
(s)
Y
i
(s)
U
j
(s)
U
K
(s)0 kj
R
K
(s)0 ,c.i. nule
3. Se impun peformanele pe care trebuie s le realizeze sistemul eventual
privind dependena dintre o anumit referin sau perturbaie i o anumit ieire.
4. Se determin matricile de transfer n circuit nchis dorite , H
v
(s) H
p
(s)
care realizeaz performanele impuse.
5. Se determin matricea de transfer n circuit deschis dorit
(3.2.2) H
d
(s) H
v
(s) [I H
v
(s)]
1
[I H
v
(s)]
1
H
v
(s)
iar cnd este inversabil, H
v
(s)
. (3.2.3) H
d
(s) [I + [H
v
(s)]
1
]
1
Dac se urmrete comportarea n raport cu perturbaiile,
(3.2.4) H
d
(s) H
p
(s) [G(s) H
p
(s)]
sau cnd este inversabil, H
p
(s)
. (3.2.5) H
d
(s) G(s) [H
p
(s)]
1
I
6. Se calculeaz matricea de transfer a regulatorului
. (3.2.6) H
R
(s) [H
F
(s)]
1
H
d
(s)
Cnd anumite matrici sunt neinversabile i algoritmul de sintez necesit
inversa acestor matrici, se obin soluii aproximative folosind n locul inverselor
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
85
matricelor respective pseudoinversele lor.
Se amintete faptul c pseudoinversa unei matrici, notat , minimizeaz A
+
dup criteriul celor mai mici patrate eroarea comis n aprecierea soluiei unui
sistem liniar de ecuaii
. (3.2.7) A X Y
Dac matricea A este inversabil, soluia sistemului de mai sus este
(3.2.8) X A
1
Y
i eroarea este
. (3.2.9) Y A
1
X 0
Dac matricea A este neinversabil, cea mai buna soluie realizeaz X
(3.2.10)
X
min
X
min YA X X A
+
Y
unde prin s-a notat pseudoinversa matricei A. A
+
O form pentru aceast pseudoinvers este,
, dac . (3.2.11) A
+
[A
T
A]
1
A
T
det(A
T
A) 0
Cnd este neinversabil, se aproximeaz legea de reglare prin H
F
(s)
. (3.2.12) H
R
(s) H
F
+
(s) H
d
(s) [H
F
T
(s) H
F
(s)]
1
H
F
T
(s) H
d
(s)
Pentru rezolvarea sintezei sistemelor multivariabile n domeniul complex s
se poate utiliza teoria matricelor polinomiale i raionale i reprezentri specifice
ale acestor sisteme, evitndu-se astfel problemele aprute la necesitatea inversrii
unor matrice cum apar n aa numita sintez exact ca mai sus.
De asemenea o atenie deosebit trebuie acordat problemelor de
observabilitate i controlabilitate a structurilor precum i evoluiei mrimii de
comand n circuit nchis. u
F
(t)
Pentru structura de mai sus, cu reacie direct, dac matricea este H
v
(s)
diagonal atunci
. (3.2.13) H
v i,j
(s) 0, i j
Forma diagonal exprim condiia de decuplare intrare-iesire. n aceste
condiii i matricea este diagonal avnd componentele pe diagonala H
d
(s)
principal,
. (3.2.14) H
ii
d
(s)
H
v ii
(s)
1 H
v ii
(s)
Dac de exemplu,
(3.2.15) H
v ii
(s)
ni
2
s
2
+2
i
ni
s +
ni
2
H
ii
d
(s)
ni
2
s(s + 2
i
n
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
86
3.2.2. Exemplu de calcul n structur nedecuplat
Se consider o instalaie avnd
1
, (3.2.16) H
F
(s)
10
0.1s+1
1
0.1s+1
5
s+1
1
s+1
1
]
1
1
1
100
s+1
10
s+1
5
s+1
1
s+1
1
]
1
1
1
n care ieirea rspunde cu o aceeai constant de timp la y
1
T
F1
0.1 sec .
ambele intrri iar rspunde cu constant de timp de asemenea n y
2
T
F2
1 sec .
raport cu ambele intrri.
Se dorete o reglare decuplat, caracterizat prin,
; . (3.2.17) H
v 12
(s) 0 H
v 21
(s) 0
Se impun performanele de mai jos, realizate prin funcii de transfer de
ordinul doi:
Pentru y1:
1
=2% , t
r1
=0.05 sec
1
=0.8 t
'
r
=5.5
n1
=110sec
-1
.
Pentru y2:
2
=5% , t
r2
=0.6 sec
2
=0.7 t
'
r
=6
n2
=10 sec
-1
.
Aceste performane sunt asigurate prin matricea de transfer n circuit nchis
dorit,
(3.2.18) H
v
(s)
110
2
s
2
+(20.8110)s+110
2
0
0
10
2
s
2
+(20710)s+10
2
1
]
1
1
1
creia i corespunde matricea de transfer n circuit deschis dorit,
(3.2.19) H
d
(s)
12100
s(s+176)
0
0
100
s(s+14)
1
]
1
1
1
Matricea de transfer a legii de reglare este,
H
R
(s) H
F
1
(s)H
^d
(s)
s+10
50
(s+1)
5
(s+10)
10
2(s + 1)
1
]
1
1
1
12100
s(s+176)
0
0
100
s(s+14)
1
]
1
1
1
(3.2.20) H
R
(s)
242(s+10)
s(s+176)
20(s+1)
s(s+14)
1210(s+10)
s(s+176)
200(s+1)
s(s+14)
1
]
1
1
1
Notnd,
H
R1
(s)
242(s + 10)
s(s + 176)
242
176
(1+
1
0.1s
)(
1
1
176
s + 1
) 1.375(1+
1
0.1s
)
1
0.0056s + 1
(3.2.21)
1
Exemplul este preluat din cartea S. Clin, Regulatoare automate, Ed. Did. Ped. 1976.
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
87
H
R2
(s)
200(s + 1)
s(s + 14)
200
14
(1+
1
s
)(
1
0.071s +1
) 14.28(1 +
1
s
)
1
0.071s + 1
(3.2.22)
se obine
, (3.2.23) H
R
(s)
H
R1
(s) 0.1 H
R2
(s)
5 H
R1
(s) H
R2
(s)
1
]
1
Mrimea de comand este un vector
Y
R
(s)=H
R
(s)(s)
avnd componentele,
Y
R1
(s) = U
F1
(s) = H
R1
(s)
1
(s) - 0.1H
R2
(s)
2
(s) (3.2.24)
Y
R2
(s) = U
F2
(s) = -5H
R1
(s)
1
(s) + H
R2
(s)
2
(s) (3.2.25)
Sistemul calculat se poate implementa folosind dou regulatoare de tip PI
cu filtru de ordinul unu
(3.2.26) H
R1
(s) K
R1
(1 +
1
T
i1
s
)
1
T
1
s + 1
(3.2.27) H
R2
(s) K
R2
(1 +
1
T
i2
s
)
1
T
2
s + 1
n care,
H
R1
(s) : K
R1
=1.375; T
i1
=0.1 sec; T
1
=0.0056sec. (3.2.28)
H
R2
(s) : K
R2
=14.28; T
i2
=1 sec; T
2
=0.071sec. (3.2.29)
i doua elemente sumatoare ponderate reprezentate in Fig.3.2.1.
+
-5 -0.1
1
2
F1
F2
1
2
R2
R1
1
v
y
y
U
U
F11
H
F12
H
F21
H
F22
H
2
v
H
H
(s)
(s)
(s)
(s)
+
+
+
_
+
+
_
Figura nr.3.2.1.
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
88
3.2.3. Varianta Kessler a criteriului modulului pentru sisteme
multivariabile
Ca i n cazul sistemelor monovariabile, varianta Kessler a criteriului
modulului const n compensarea serie a constantelor de timp dominante i
asigurarea unor performane dependente de constantele de timp mici echivalate
printr-o cosntant de timp egal cu suma lor denumita si "constanta parazit".
Dac se asigur o structur n varianta decuplat
, (3.2.30) H
v
(s)
H
v11
(s) ...... 0 ........ 0
0 ........ H
vii
(s) ..... 0
0.............. 0 ....../ H
vrr
(s)
1
]
1
1
1
care determin
(3.2.31) H
d
(s)
H
11
d
(s) .... 0 .. 0
0 .... H
ii
d
(s) .... 0
0..... 0 ...... H
rr
d
(s)
1
]
1
1
1
atunci se evalueaz uor inversa matricei de transfer n circuit deschis,
H
d
(s)
-1
= H
V
(s)
-1
- I H
ii
d
(s)
-1
= H
Vii
(s)
-1
- I. (3.2.32)
In varianta Kessler a criteriului modulului se impune
(3.2.33) H
ii
d -1
(s)
1
2T
i
s(T
i
s +1)
unde T
i
=T
Fpii
este suma constantelor de timp mici (parazite) ale componentei
H
Fii
(s) .
Se obine
(3.2.34) H
vii
(s)
1
2T
i
2
s
2
+2T
i
s + 1
Cunoscnd i se calculeaz, cu formulele prezentate anterior, H
d
(s) H
F
(s)
matricea de transfer a regulatorului . H
R
(s)
Pentru cazul dimensiunilor se pezint soluiile sub forma 2 2
componentelor matricei astfel: H
R
(s)
Considernd
(3.2.35) H
d
(s)
H
11
d
(s) 0
0 H
11
d
(s)
1
]
1
i
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
89
(3.2.36) H
11
d
(s) H
1
d
(s)
1
2T
1
s(T
1
s + 1)
, (3.2.37) H
22
d
(s) H
2
d
(s)
1
2T
2
s(T
2
s + 1)
se poate reprezenta strucura sistemului sub form de graf de fluen ca n
Fig.3.2.2.
H
R11
H
R22
Y
1
Y
2
V
1
V
2
1
H
R12
H
F21
H
F22
H
R21
H
F12
H
F11
U
F1
U
F2
1 1
1 1
-1
-1
Figura nr.3.2.2.
Din graful de fluen de mai sus se obin relaiile,
H
d
11
= H
d
1
= H
F11
H
R11
+ H
F12
H
R21
H
d
12
= 0 = H
F11
H
R12
+ H
F12
H
R22
H
d
21
= 0 = H
F21
H
R11
+ H
F22
H
R21
(3.2.38)
H
d
22
= H
d
2
=H
F22
H
R22
+ H
F21
H
R12
.
Notnd prin Q(s) factorul de interaciune, n domeniul complex,
(3.2.39) Q(s)=
H
F12
(s)H
F21
(s)
H
F11
(s)H
F22
(s)
se obin soluiile:
H
R11
(s)
H
1
d
(s)
H
F11
(s)
1
1 Q(s)
(3.2.40) H
R22
(s)
H
2
d
(s)
H
F22
(s)
1
1 Q(s)
H
R12
(s)
H
F12
(s)
H
F11
(s)
H
R22
(s)
H
R21
(s)
H
F12
(s)
H
F22
(s)
H
R11
(s)
.
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
90
3.2.4. Exemplu de aplicare a Variantei Kessler pentru sisteme
multivariabile
Se consider un sistem multivariabil cu partea fix descris prin matricea
de transfer
2
(3.2.41) H
F
(s)
5
(10s+1)(0.2s+1)
0.1
(10s+1)(0.2s+1)
2
(5s+1)(0.1s+1)
10
(5s+1)(0.1s+1)
1
]
1
1
1
Toate constantele de timp mici au fost echivalate prin:
T
11
= 0.2 T
21
=0.2 T
12
=0.1 T
22
=0.1
Se alege
H
d
(s)
1
20.2s(0.2s+1)
0
0
1
20.1s(0.1s+1)
1
]
1
1
1
H
V
(s)
1
2(0.2)
2
s2+20.2s+1
0
0
1
2(0.1)
2
s2+20.1s+1
1
]
1
1
1
(3.2.42)
1
2
2
;
n1
1
2 0.2
3.33
1
4.3%, t
r1
1.68sec,
b
3.33sec
1
, ..
(3.2.43)
(3.2.44)
2
2
2
;
n2
1
2 0.1
6.66
1
4.3%, t
r2
3.2sec, ....
(3.2.45) Q(s)
2
(5s+1)(0.1s+1)
1
(10s+1)(0.2s+1)
5
(10s+1)(0.2s+1)
10
(5s+1)(0.1s+1)
1
25
(3.2.46) H
R11
(s)
1
20.2s(0.2s+1)
5
(10s+1)(0.2s+1)
1
1
1
25
1
9.6
10s + 1
s
1.04(1 +
1
10s
)
(3.2.47) H
R22
(s)
1
20.1s(0.1s+1)
10
(5s+1)(0.1s+1)
1
1
1
25
0.52
5s +1
s
2.6(1 +
1
5s
)
(3.2.48) H
R12
(s)
1
(10s+1)(0.2s+1)
5
(10s+1)(0.2s+1)
H
R22
(s) 0.2H
R22
(s)
(3.2.49) H
R12
(s)
1
(5s+1)(0.1s+1)
5
(5s+1)(0.1s+1)
H
R11
(s) 0.2H
R11
(s)
U
F1
(s) = H
R11
(s)
1
(s) - 0.2H
R22
(s)
2
(s) (3.2.50)
2
Exemplul este preluat din cartea S. Clin, Regulatoare automate, Ed. Did. Ped. 1976.
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
91
U
F2
(s) = -0.2H
R11
(s)
1
(s) + H
R22
(s)
2
(s) (3.2.51)
Sistemul poate fi realizat folosind dou regulatoare PI avnd:
K
R1
=1.04, T
i1
= 10sec. (3.2.52)
respectiv
K
R2
=2.6 , T
i2
= 5sec. (3.2.53)
i dou sumatoare ponderate, reprezentat ca in Fig.3.2.3.
1.04(1+
10s
1
)
-0.2
-0.2
2.6(1+
1
5s
)
_
+
+
_
v
v
y
y
1
2
2
1
1
2
+
+
+
+
H
F
(s)
Figura nr.3.2.3.
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
92
3.2.5. Acordarea regulatoarelor tipizate ntr-un sistem multivariabil
cu dou intrri i dou ieiri n structur nedecuplat
Acordarea regulatoarelor prin teste experimentale realizate pe sistemul fizic
de reglare se poate efectua i pentru sistemele multivariabile, ca de exemplu cel
reprezentat n Fig.3.2.4. , procednd astfel:
v
2
v
1
_
+
+
_
y
y
H
F11
H
F12
H
F21
H
F22
1
2
H
R1
(s)
H
R2
(s)
Figura nr.3.2.4.
1. Se alege un raport c1/c2 al ponderilor celor doua ci directe, definit prin
(3.1.54)
s0
lim
H
R1
(s)H
F11
(s)
H
R2
(s)H
F22
(s)
c
1
c
2
K
R1
K
R2
c
1
c
2
H
F11
(0)
H
F22
(0)
2. Se determin valorile limit de stabilitate K
R1lim
, K
R2lim
cu respectarea
raportului K
R1lim
= K
R2lim
.
Pentru aceasta, se mrete incet factorul de proportionalitate al unui
regulator modificnd n acelai timp factorul de proporinalitate al celuilalt
regulator astfel nct K
R1
= K
R2
, pna cnd sistemul intr n oscilaie.
Se noteaz aceste valori K
R1lim
, K
R2lim
(K
R1lim
=K
R2lim
) i perioada
oscilaiilor rezultate T
lim
, calculnd
lim
=2/T
lim
.
3. Se recomand urmtoarele valori pentru parametrii legilor de reglare:
Regulator K
R1
T
i1
= T
i2
T
d1
=
P
0.5K
R1lim
0.5K
R2lim
PI
0.45K
R1lim
0.45K
R2lim
5.225
lim
PID
0.6K
R1lim
0.6K
R2lim
3.14
lim
0.785
lim
3. SISTEME MULTIVARIABILE 3.2. Calculul sistemelor multivariabile
DE REGLARE AUTOMAT de reglare automat
93
4. SISTEME DE REGLARE CU TIMP MORT
4.1. Caracteristici generale ale sistemelor cu timp mort
4.1.1. Definiia sistemelor cu timp mort
n general prin sistem dinamic cu timp mort se nelege un sistem dinamic
n care exist cel puin o mrime care se transmite cu vitez finit. n ecuaiile
care descriu comportarea n domeniul timp (ecuaii difereniale, ecuaii de stare)
apar variabile cu argument ntrziat.
De exemplu, dac o ecuaie de stare este de forma
(4.1.1)
.
x (t) f(x(t), x(t
1
), u(t), u(t
2
))
nseamn c exist componente ale vectorului x sau ale vectorului de intrare u
care se transmit cu o ntrziere,
1
respectiv
2
. ntr-un astfel de sistem noiunea
de stare a sistemului la un moment t
0
este diferit faa de aceea de la sistemele
far astfel de ntrzieri.n sistemele de reglare automat fenomenul de timp mort
este de obicei specific prii fixe a sistemului. Se prezint n continuare cteva
astfel de instalaii cu timp mort.
4.1.2. Exemplu: Instalaie de nclzire cu band transportoare
Se consider o instalaie de nclzire n care comanda temperaturii se
efectueaz modificnd q(t), debitul de combustibil crbune praf, la intrarea n
focar, prin modificarea grosimii u(t) a stratului de combustibil la intrarea pe o
band transportoare avnd viteza constant v, ca n Fig.4.1.1.
debit q(t)
Focarul
instalaiei de
nclzre
Band transportoare
l
grosimew(t)
Clapeta de reglare
Combustibil praf
u(t)
viteza v
Element de
ntrziere
pur
Sistem
dinamic
far timp
mort
K
u(t)
w(t)
q(t)
w(t)=u(t- )
(t)
(t)=y(t)
U(s)
H (s)
(s) U(s) W(s)
H(s)
e
s
(s)
Figura nr.4.1.1.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
94
Se noteaz:
u(t): grosimea stratului de combustibil la intrarea pe band n momentul t.
w(t): grosimea stratului de combustibil la ieirea de pe banda transportoare
(la distana l fa de punctul de intrare), n momentul t .
q(t): debitul de combustibil la intrarea n focar n momentul t.
(t): temperatura din focar n momentul t.
ntre u(t) i w(t) exist relaia
(4.1.2) w(t) u(t ),
v
l
care definete un aa-numitul ''element de ntrziere pur''. Aceast relaie se
citete astfel: ieirea w la momentul t are o valoare w(t) egal cu valoarea pe care
a avut-o intrarea u cu secunde mai devreme, u(t-).
Debitul de combustibil q(t) la ieirea de pe band n momentul t este
proporional cu grosimea stratului de crbune w(t) n acelai punct printr-un factor
K ce depinde de viteza v considerat constant
. q(t) K w(t)
Marimea (t) este ieirea unui sistem dinamic far timp mort, de exemplu
un sistem dinamic liniar invariabil n timp, descris printr-o funcie de transfer
H(s) care realizez dependena
. (4.1.3) (s) H(s) W(s)
Deoarece, aplicnd teorema deplasrii n real,
, L{u(t )} e
s
U(s)
rezult
. W(s) e
s
U(s)
Se obine
(4.1.4) D(s) e
s
W(s)
U(s)
conditii initiale nule
funcia de transfer a elementului de ntirziere pur.
Comportarea intrare-ieire a instalaiei este descris prin funcia de transfer
(4.1.5) H
(s) H(s) e
s
denumit i ''funcie de transfer cu timp mort''. Ea apare ca un produs dintre o
raionala H(s) i factorul transcendent . e
s
n acest exemplu timpul mort apare la intrare printr-un element fizic
(band transportoare) datorit cruia informaia (valoarea grosimii stratului de
combustibil) se transmite cu vitez finit.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
95
4.1.3. Exemplu: Instalaie de laminare (caja de laminare)
ntr-o caj de laminare, reprezentat n Fig.4.1.2., materialul brut (brama)
nclzit este deformat prin intermediul a doi cilindri denumii role de laminare,
rezultnd un produs laminat a crui grosime d(t) trebuie s fie riguros constant.
Brama
+
+
+ +
+ + + +
l
u(t)
d(t)
v
r(t)
Role de antrenare
Produs laminat
Traductor de
grosime
Role de laminare
a
k
u(t)
H(s)
d(t)
y(t)=r(t)
e
s
r(t)=d(t- ), =l/v
Figura nr.4.1.2.
Grosimea d(t) a produsului laminat este controlat prin distana u(t) dintre
axele rolelor de laminare. Evident d(t) depinde de muli factori: viteza de rotaie
R
a rolelor de laminare; viteza de rotaie
a
a rolelor de antrenare; temperatura
i compoziia materialului, etc.
Datorit condiiilor de lucru, un traductor de grosime este plasat la o
distan l astfel c informaia despre grosime este
. r(t) d(t )
Dac dependena este exprimat printr-o funcie de transfer H(s) atunci u d
dependena este exprimat printr-o funcie de transfer ''cu timp mort'', u r
(4.1.6) H
(s)
R(s)
U(s)
e
s
H(s)
n acest exemplu timpul mort apare la ieire printr-un element fizic
(plasarea traductorului la o anumit distana), din care cauz mrimea de ieire
d(t) (mrimea reglat) este ntrziat.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
96
4.1.4. Modelul matematic al elementului de ntrziere pur (EIP)
4.1.4.1. Relaii de reprezentare
Privit ca obiect orientat intrare u - ieire y, elementul de ntrziere pur este
descris prin relaia intrare-ieire (4.1.7) reprezentat n Fig.4.1.3.,
(4.1.7) y(t) u(t )
u(t);y(t)
t
y(t)
u(t)
t
1
0
y(t
1
) t
1
u( )
t
1
Figura nr.4.1.3.
nelegnd prin aceasta c valoarea ieirii la un moment t este egal cu valoarea
pe care a avut-o intrarea la momentul t-, oricare ar fi t n domeniul de
observare.
EIP este un element dinamic infinit dimensional. Starea la un moment
este reprezentat prin segmentul:
. (4.1.8) u
[t
0
,t
0
)
{(t, u(t)), t [t
0
, t
0
)}
Pentru a determina n mod univoc ieirea y(t) pentru , cunoscnd t t
0
intrarea u(t) pentru , informaia minim necesar (starea la momentul t
0
, t t
0
notat cu s(t
0
)), este
, (4.1.9) s(t
0
) u
[t
0
, t
0
)
constituit dintr-o infinitate de valori.
Starea la un moment oarecare t este
. (4.1.10) s(t) u
[t , t)
EIP se afl la un moment t
0
n stare nul (s(t
0
)=0), dac i numai dac
. (4.1.11) u(t) 0, t [t
0
, t
0
)
Relaia intrare-ieire (4.1.7) ndeplinete proprietatea de liniaritate i
invarian n timp. Astfel EIP este un sistem liniar invariabil n timp infinit
dimensional.
Aplicnd relaiei (4.1.7) transformarea Laplace n condiii iniiale nule
, se obine funcia de transfer a elementului de ntrziere pur (EIP) s(0) 0
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
97
(4.1.12) D(s)
Y(s)
U(s)
e
s
Funcia de transfer a EIP este o funcie exponenial n s, periodic cu
perioada . j
2
Procednd ca n cazul sistemelor far timp mort, se deduc:
- Caracteristica amplitudine-pulsaie:
(4.1.13) A
D
() D(j) e
j
1, 0
- Caracteristica faz-pulsaie:
(4.1.13a)
D
() arg(D(j)) arg(e
j
) , 0
- Caracteristica complex de frecven:
(4.1.14) D(j) e
j
al crei hodograf este un cerc de raz unitate, gradat n conform (4.1.14).
4.1.4.2. Aproximarea expresiei exp(-tau*s) printr-o raional
Deoarece multe tehnici de proiectare a SRA folosesc numai funcii de
transfer raionale, o problem important const n aproximarea EIP printr-un
sistem liniar invariabil n timp (SLIT) de dimensiune finit.
Se prezint cteva aproximari utilizate n aplicaii practice:
a) Aproximarea prin dezvoltare n serie Taylor i trunchiere la un anumit
rang.
(4.1.15) D(s) e
s
1
k0
k
k!
s
k
1
k0
n
k
k!
s
k
Dn
(T)
(s)
Exemple:
` (4.1.16) D
1
(T)
(s)
1
1+ s
;
(4.1.17) D
2
(T)
(s)
1
1 +s +
2
2
s
2
Aceast metod de aproximare de multe ori nu este recomandat
deoarece poate conduce la modele liniare de ordin finit instabile n circuit nchis
dei sistemul fizic n circuit nchis nu este instabil.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
98
b) Aproximarea prin dezvoltarea Pad.
Folosind tehnica Pad pentru dezvoltarea unei exponeniale n fracii se
obin modele aproximative de ordin finit D
n
(s) care pstreaz condiia de modul
. (4.1.18) D
n
(j) 1 0
Aceste modele sunt stabile dar fr minim de faz (au zerouri n
semiplanul drept).
Aproximarea Pad de ordinul nti:
(4.1.19) D
1
P
(s)
1
2
s
1+
2
s
Aproximarea Pad de ordinul doi:
(4.1.20) D
2
P
(s)
1
2
s +
2
12
s
2
1+
2
s +
2
12
s
2
Aproximarea Pad de ordinul trei:
(4.1.21) D
3
P
(s)
1
2
s +
2
10
s
2
3
120
s
3
1+
2
s +
2
10
s
2
+
3
120
s
3
c) Aproximarea printr-o conexiune serie de elemente aperiodice.
Avnd n vedere c
, (4.1.22) e
x
lim
n
(1 +
x
n
)
n
se obine:
(4.1.23) D(s) e
s
1
(1 +
n
s)
n
D
n
A
(s)
sau, deoarece
, (4.1.24) e
x
e
x
2
e
x
2
avem
(4.1.25) D(s) e
s
(1
2n
s)
n
(1 +
2n
s)
n
D
nn
A
(s)
Observaii:
Un element de ntrziere pur realizeaz ntrzierea n timp a mrimii de
intrare, oricare ar fi forma de variaie n timp a acesteia. O structur cu circuite
logice (circuit monostabil, etc.) care realizeaz ntrzierea n timp a unor
impulsuri sau a unor valori de prag nu intr n aceast categorie.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
99
4.1.5. Comportarea echivalent intrare-ieire a unui sistem cu timp
mort
n foarte multe cazuri efectul timpului mort se consider ca acionnd
echivalent asupra intrrii sau ieirii ntr-o conexiune serie cu un sistem dinamic
fr timp mort n particular liniar invariabil n timp descris printr-o funcie de
transfer H(s). Acest model echivalent este indicat dac experimental se constat
c la o variaie a intrrii (fa de un regim staionar) dup o lege oarecare
ncepnd cu un moment , mrimea de ieire rspunde la aceast variaie t
0
ncepnd cu un moment ,n intervalul ieirea pstrnd t
1
t
0
+ [ t
0
, t
0
+ )
valoarea sa staionar. Diferena este aceeai oricare ar fi forma de t
1
t
0
variaie n timp a intrrii. Un astfel de timp mort se numete timp mort pur .
Se poate ataa o funcie de transfer ''cu timp mort'' de forma
(4.1.26) H
(s) H(s) e
s
e
s
H(s)
Y(s)
U(s)
n figura Fig.4.1.4. este ilustrat echivalena intrare-ieire a acestei reprezentri.
t
t
u(t) w(t) y(t)
H( s)
e
s
H (s)=H(s)e
s
exprim
u(t);w(t)
y(t)
t
0
t =t +
1 0
Y
s t
st
U
u(t)
w(t)
H(s)
y(t)
t =t +
1 0
t
0
a) Timp mort pur, echivalent la intrare
b) Timp mort pur, echivalent la iesire
u(t) q(t) y(t)
H( s )
e
s
H (s)= H(s)
e
s
u(t)
y(t);q(t)
t
t
exprim H(s)
u(t)
t =t +
1 0
t
0
t
0
q(t)
y(t)
st
U
Y
s t
Figura nr.4.1.4.
Toate tehnicile de identificare de la sistemele fr timp mort se pot aplica,
n aceast echivalen, sistemelor cu timp mort considernd ns ca s-a aplicat
intrarea w(t). Mrimea w(t) este o mrime echivalent ce nu are totdeauna o
semnificaie fizic. Evident n particular u(t) poate reprezenta o variaie treapt.
Prin modelul de forma (4.1.26) avnd H(s) de ordin redus se pot aproxima
sisteme fr timp mort infinit dimensionale (descrise prin ecuaii cu derivate
pariale) sau sisteme difereniale obinuite de ordin ridicat.
n acest caz, pe lng timpul mort pur, dac exist, apare i un timp mort
echivalent, care exprim reducerea ordinului sistemului.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
100
4.1.6. Aproximarea comportrii unui sistem de ordin ridicat
printr-un model de ordinul nti cu timp mort
Se consider rspunsul la intrare treapt, fa de un regim staionar, dedus
experimental ca n figura Fig.4.1.5.
t
(
]
u
u
t
model
y
( )
y
exp
y
exp
(t )
0
t
0 t
K
u
y
exp
y
model
(t)
p
e
B
C D
A
W
y
exp
(t)
y
exp
Figura nr.4.1.5.
(4.1.27)
H
(s) e
s
K
Ts + 1
,
p
+
e
, K
y
exp
u
n punctul de inflexiune W se duc dou semitangente care intersecteaz
ordonatele i n punctele A respectiv B. Aceast dreapt y
exp,st
(t
0
) y
exp
()
subntinde intervalul de timp T.
Se msoar timpul mort pur , ca fiind intervalul de timp ntre momentul
p
aplicrii semnalului treapt i momentul n care ieirea are o variaie mai mare
dect clasa de precizie a aparatelor de msurare i nregistratoare. n Fig.4.1.5.
timpul mort pur este reprezentat de segmentul CD.
Se consider drept timp mort echivalent , intervalul de timp
e
corespunztor segmentului DA. Timpul mort total este
. (4.1.28)
p
+
e
Factorul de proporionalitate K se determin prin raportul dintre variaia
ieirii i variaia intrrii.
n foarte multe calcule de sintez a SRA acest model echivalent d
rezultate satisfctoare.
.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
101
4.1.7. Caracteristici de frecven ale sistemelor cu timp mort
Pentru un sistem cu timp mort descris prin funcia de transfer
(4.1.29) H
(s) H(s) e
s
se deduc o serie de caracteristici care se compar cu cele ale funciei de transfer
fr timp mort , evideniindu-se efectul existenei timpului mort , mai H(s)
precis a factorului . e
s
(4.1.30) H
(0) H(0)
a. Timpul mort nu afecteaz comportarea n regim staionar. Toate relaiile pentru
indicatorii de calitate n regim staionar (K
p
, K
v
, K
a
) deduse la sistemele fr
timp mort rmn valabile i la sistemele cu timp mort.
(4.1.31) A
() H
(j) H(j)e
j
H(j) A()
b. Timpul mort nu afecteaz caracteristica amplitudine-pulsaie a funciei de
transfer H(s) n structura de mai sus.
() arg(H
(j)) arg{H(j) e
j
} arg{H(j)} ()
(4.1.32)
() ()
c. Caracteristica faz-pulsaie este puternic afectat prin apariia termenului
d. Caracteristica complex de frecven pornete din punctul i are o H
(j) H(0)
evoluie n form de spiral n jurul originii planului complex tinznd, H
(j)
cnd , ctre un cerc de raz . Pentru strict proprie , A() H(s)
i tinde ctre origine n form de spiral. A() 0 H
(j)
Deoarece pentru fiecare ,
, (4.1.33) A
() A()
, (4.1.34)
() ()
fiecare vector se obine prin rotirea vectorului , de lungime H
(j) H(j)
, n sens orar cu un unghi egal cu . r A()
Forma de spiral a caracteristicii complexe de frecven a unui sistem este
o indicaie a existenei timpului mort.
n figura Fig.4.1.6. este reprezentat modul de construire a vectorilor
pornind de la vectorii . H
(j) H(j)
n figurile Fig.4.1.7. i Fig.4.1.8. sunt reprezentate caracteristicile
complexe de frecven pentru cteva exemple de funcii de transfer cu timp mort,
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
102
unde,
(4.1.35) P real{H(j) }
(4.1.36) Q imag{H(j) }
. (4.1.37) A() H(j)
Re H(j )
H(j )
2
1
H (j )
H(j )
A( )
1
0
(0)(0)
1
1
2
2
3
3
jImg H(j )
planul H(j ) ; H (j )
( )
1
H (j )
1
H(j )
2
H (j )
2
3
Figura nr.4.1.6.
b) H (s)=
K
s
e
s
a) H (s)=
K
Ts+1
e
jQ
P
1
1
H(j )
0
+
H (j )
A( )=0
3
T
1
3
T
1
jQ
P
K
0
/6
/4
/3
A( )=0
3
T
3
T
T
1
T
1
Figura nr.4.1.7.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
103
a) H (s)=
T s+1
e
s K(T s+1)
d
; T <T
d
b) H (s)=
T s+1
e
s K(T s+1)
d
;T >T
d
c) H (s)=K(1+ )
e
s
1
T s
i
1
K
Td
T
jQ
P
K
H(j )
H (j )
0
A( ) A( ) A( )=K
Td
T
=K
Td
T
=K
Td
T
<A(0)=K
P
H(j )
K
H (j )
K
Td
T
0
jQ
A( )=K
Td
T
>A(0)=K
=K
Td
T
=K
Td
T
K
H (j )
H(j )
0
+
P
jQ
A( )=K A( )=K A( )=K
Figura nr.4.1.8.
4. SISTEME DE REGLARE 4.1. Caracteristici generale ale
CU TIMP MORT sistemelor cu timp mort
104
4.2. Sisteme cu timp mort n circuit nchis
4.2.1. Funcii de transfer n circuit nchis
Existena timpului mort conduce la mari dificulti n analiza i sinteza
sistemelor de reglare. Din pcate timpul mort este o realitate introdus de partea
fixat a sistemului, care nu poate fi neglijat. Chiar pentru modele liniare
invariabile n timp, de tipul (4.1.26), tratarea pe cale analitic exact a
comportrii n circuit nchis este practic imposibil.
Se consider structura unui sistem de reglare ca n Fig.4.2.1.,
( )
t
u(t)
+
-
H (s) H (s)
+
+
r(t)=y(t)
p(t)
R
F
R F
y (t)=u (t)
H (s)
P
F
Figura nr.4.2.1.
n care se evideniaz i efectul unei perturbaii deplasat la ieire, descris
printr-un model matematic liniar invariabil n timp, n care funciile de transfer
sunt:
(4.2.1) H
F
(s) H
F
(s) e
1
s
M
F
(s)
L
F
(s)
e
1
s
(4.2.2) H
Fp
(s) H
Fp
(s) e
2
s
M
p
(s)
L
p
(s)
e
2
s
(4.2.3) H
d
(s) H
R
(s) H
F
(s)
M
d
(s)
L
d
(s)
e
1
s
H
R
(s)
M
R
(s)
L
R
(s)
H
d
(s) H
R
(s) H
F
(s)
M
d
(s)
L
d
(s)
(4.2.4) M
d
(s) M
R
(s) M
F
(s); L
d
(s) L
R
(s) L
F
(s)
Rspunsul forat al sistemului este
Y(s) H
v
(s) V(s) +H
p
(s) P(s)
unde,
H
v
(s)
Y(s)
V(s) P(s)0
cond. init. nule
d
(s)
1 + H
d
(s)
H
R
(s) H
F
(s) e
1
s
1 +H
R
(s) H
F
(s) e
1
s
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
105
(4.2.5) H
v
(s)
M
R
(s) M
F
(s) e
1
s
L
R
(s) L
F
(s) + M
R
(s) M
F
(s) e
1
s
M
d
(s)
L
v
(s)
e
1
s
reprezint funcia de transfer n circuit nchis n raport cu mrimea impus.
Se observ c apare sub forma unei fracii avnd la numitor expresia H
v
(s)
transcendent
(4.2.6) L
v
(s) L
R
(s) L
F
(s) + M
R
(s) M
F
(s) e
1
s
La numrtor, pe lng polinomul M
d
(s) apare factorul care exprim e
1
s
ntrzierea n transmiterea efectului mrimii impuse asupra mrimii de ieire.
H
p
(s)
Y(s)
P(s)
V(s)0
c.i.n
H
Fp
(s)
1 + H
R
(s) H
F
(s)
H
p
(s)
M
p
(s)L
R
(s)L
F
(s)
L
p
(s)[L
R
(s)L
F
(s) + M
R
(s)M
F
(s)e
1
s
]
e
2
s
M
p
(s)L
R
(s)L
F
(s)
L
p
(s)L
v
(s)
e
2
s
(4.2.7)
Numitorul funciei de transfer conine pe lng expresia H
p
(s)
transcendent i polinomul . L
v
(s) L
p
(s)
n cazul perturbaiilor externe, aplicate la intrarea n partea fix,
H
Fp
(s) H
F
(s)
1
2
(4.2.8) H
p
(s)
M
F
(s) L
R
(s)
L
v
(s)
e
s
n cazul perturbaiilor care exprim erorile de msurare
(4.2.9) H
Fp
(s) 1;
2
0 ; H
p
(s)
L
R
(s) L
F
(s)
L
v
(s)
Notnd,
, (4.2.10)
(s) L
R
(s) L
F
(s) e
s
+ M
R
(s) M
F
(s)
funciile de transfer n circuit nchis se exprim prin relaiile:
(4.2.11) H
v
(s)
M
v
(s)
(s)
(4.2.12) M
v
(s) M
d
(s) M
R
(s) M
F
(s)
(4.2.13) H
p
(s)
M
p
(s) L
R
(s) L
F
(s)
L
p
(s)
(s)
e
(
2
1
)s
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
106
4.2.2. Sistem n circuit nchis cu elemente nedinamice i un element
de ntrziere pur
Se consider cel mai simplu caz n care singurul element dinamic este
elementul de ntrziere, considernd:
. (4.2.14) H
Fp
(s) 0; H
F
(s) K
R
e
s
; H
R
(s) K
R
Dac se consider ntrzierea pur la ieire, rezult schema bloc din Fig.4.2.2.
v(t) +
-
y(t) q(t) t
( )
e
s -
K
R
K
F
u (t)
F
Figura nr.4.2.2.
Aceleai rezultate se obin i dac se consider ntrzierea la intrarea n partea
fixat.
Notnd
(4.2.15) K K
R
K
F
i deoarece
, , (4.2.16) y(t) q(t ) q(t) K [u(t) y(t) ]
se obine relaia intrare-ieire n domeniul timp
. (4.2.17) y(t) K y(t ) +K v(t )
Relaia (4.2.17) este o ecuaie funcional, nediferenial, care exprim un
sistem dinamic infinit dimensional. Funcia de transfer n circuit nchis se obine
fie utiliznd relaia (4.2.5) fie aplicnd transformarea Laplace direct relaiei
(4.2.17),
(4.2.18) H
v
(s)
Y(s)
U(s)
Ke
s
1 + Ke
s
K
(s)
;
(s) e
s
+ K
Polii
m
ai funciei de transfer H
v
(s) se obin din ecuaia
(4.2.19) D
(s) 0 e
s
+K 0 e
s
K
Deoarece
K R, K K e
j
k
,
k
0 daca K 0 sau
k
daca K< 0
rezult
(4.2.20)
m
ln K
+j
(+
k
+ 2m)
, m Z
Deci sistemul din Fig.4.2.2. are o infinitate de poli complex conjugai
m
dispui n planul complex s pe o dreapt vertical ca n Fig.4.2.3-a.
Evident,
. (4.2.21)
m
,
m
m1
daca K > 0 si
m
m2
daca K < 0
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
107
Dac K<0 exist un singur pol real
. (4.2.22)
1
ln K
c) Repartitia P-Z a modelului
finit obtinut prin
aproximarea Pad
j
2
1
(P )
2
2
(P )
(P)
2
1
z
2
z
(P)
2
(P)
1
1
z
=
2
(P)
1
1
z
=
2(K+1)
(K-1)
(P)
1
1
(P)
1
j
ln|K|
-1
+ s j
m+1 m - =j
2
a) Repartitia P-Z a sistemului
cu timp mort
b) Repartitia P-Z a modelului
finit prin trunchierea seriei
Taylor
1
(1)
1
(2)
2
(2)
-
1
1
(1)
=
K+1
2
-
Figura nr.4.2.3.
Se observ c dac , sistemul este stabil n circuit nchis. K < 1
Asigurarea unei amortizri exprimat prin relaia
implic , (4.2.23) Re(
m
) <
0
K e
adic amplificarea n circuit deschis trebuie redus exponenial n raport cu
valoarea timpului mort.
Aceast observaie este n general valabil pentru orice sistem de reglare
automat cu timp mort i anume:
Asigurarea stabilitii sistemului n circuit nchis (sau a unei rezerve de
stabilitate) se obine cu preul micorrii drastice a amplificrii n circuit deschis.
Aceast micorare afecteaz ns nefavorabil celelalte performane ale
sistemului: erorile staionare, durata regimului tranzitoriu, capacitatea de rejecie a
perturbaiilor. O structur de reglare bazat pe aa numitul ''Predictor Smith''
nltur acest neajuns ns cu preul cunoaterii cu exactitate a funciei de transfer
H
F
(s).
Folosind acest exemplu simplu se pot evidenia, pe cale analitic, efectele
aproximrii factorului prin polinoame sau raionale. e
s
Utiliznd aproximarea exponenialei prin polinoame de diferite grade prin
trunchierea dezvoltrii n serie Taylor se obin urmtoarele rezultate:
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
108
a. Aproximarea prin polinom de gradul 1.
Repartiia polilor este reprezentat n Fig.4.2.3-b. Se aproximeaz,
, (4.2.24) e
s
1 + s
funcia de transfer n circuit nchis (4.2.18) devine
(4.2.25) H
v
(s) H
v1
(s)
K
1 + s + K
(4.2.26)
(s) 1 + s +K s + (K +1)
Acest model de ordinul nti are un singur pol
. (4.2.27)
1
(1)
K+ 1
Modelul exprim o comportare stabil dac , incompatibil cu K 1
condiia de stabilitate a sistemului real . K (1, 1)
b. Aproximarea prin polinom de gradul 2.
, (4.2.28) e
s
1 + s +
2
2
s
2
H
v
(s) H
v2
(s)
K
K+ 1 + s +
2
2
s
2
cu doi poli,
. (4.2.29)
(1,2)
(2)
(1 t j 2K+ 1 )
Modelul H
v2
(s) este stabil pentru K>-1, de asemenea condiie
incompatibil cu aceea a sistemului real.
Pentru
, (4.2.30) K(1,
1
2
],
1,2
(2)
R
iar pentru
. (4.2.31) K
1
2
,
1,2
(2)
C
c. Aproximarea prin polinom de gradul 3.
Conduce la condiia de stabilitate a modelului , n schimb K (1, 2)
aproximarea prin polinom de gradul 5 conduce la un model care este instabil
pentru oricare K.
Avnd n vedere observaiile de mai sus rezult urmtoarea concluzie
important, valabil i pentru funcii de transfer H
F
(s) oarecare.
Aproximarea comportrii n circuit nchis a unui sistem cu timp mort prin
modele de ordin finit obinute prin trunchierea dezvoltrii n serie Taylor a
exponenialei e
s
este nerelevant din punct de vedere al proprietii de stabilitate,
motiv pentru care nu este recomandat.
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
109
Apar situaii n care modelul indic stabilitate dar sistemul real este instabil
sau invers, modelul indic instabilitate (de exemplu folosind polinom de gradul 5)
dar sistemul real este stabil.
n acest exemplu simplu a fost posibil determinarea exact pe cale
analitic a condiiilor necesare i suficiente de stabilitate ( ) putndu-se K < 1
face comparaii cu condiiile indicate de modelele de ordin finit. Chiar pentru
funcii de transfer H
F
(s) de ordinul unu, analiza exact nu este posibil, singurele
informaii provenind de la modelul de ordin redus care aa cum s-a vzut sunt
nerelevante.
Utiliznd aproximarea exponenialei prin raionale din dezvoltarea Pad se
obin urmtoarele rezultate:
d. Aproximarea Pad de ordinul 1.
, (4.2.32) e
s
1
2
s
1+
2
s
H
v
(s) H
v1
(P)
(s)
K(1
2
s)
(1 K)
2
s +K+ 1
avnd un pol
(4.2.33)
1
(P
1
)
K+ 1
K 1
i un zerou
. (4.2.34) z
1
(P
1
)
> 0
Condiia de stabilitate a acestui model este , identic cu aceea a K (1, 1)
sistemului real. Deoarece zeroul este pozitiv acest model este fr minim de faza.
e. Aproximarea Pad de ordinul 2.
(4.2.35) e
s
1
2
s +
2
12
s
2
1 +
2
s +
2
12
s
2
H
v
(s) H
v2
(P)
(s)
K(
2
12
s
2
2
s + 1)
(K+1)
2
12
s
2
+ (1 K)
2
s +K+ 1
avnd doi poli i dou zerouri:
(4.2.36)
1,2
(P
2
)
K 1
K + 1
tj
1
3
K
2
+ 14K + 1
1
]
1
(4.2.37) z
1,2
(P
2
)
(1t j
1
3
)
Condiia necesar i suficient de stabilitate a acestui model finit este
ca i pentru sistemul real. K (1, 1)
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
110
Pentru
, (4.2.38) K (1, 7 + 48 ],
1,2
(P
2
)
R
iar pentru
. (4.2.39) K (7 + 48 , 1),
1,2
(P
2
)
C
Deoarece zerourile complex conjugate sunt plasate n semiplanul z
1,2
(P
2
)
drept, modelul H
(P)
v2
(s) este fr minim de faz. Aceast repartiie poli zerouri
este reprezentat n Fig.4.2.3.c.
Aa cum se observ din acest exemplu, modelul finit obinut prin
aproximarea Pad exprim corect condiiile necesare i suficiente de stabilitate ale
sistemului n circuit nchis cu timp mort.
Aceasta se explic uor prin criteriul Nyquist de stabilitate.
Aproximarea Pad nu schimb caracteristica amplitudine-pulsaie a
sistemului n circuit deschis (n ipoteza unui timp mort echivalent la intrarea sau
ieirea prii fixate) iar caracteristica faz-pulsaie este foarte puin modificat
pentru . < 1
Elementul de ntrziere pur introduce o ntrziere de faz
(4.2.40)
D
()
pe cnd aproximantul Pad de ordinul 1 un defazaj
. (4.2.41)
D1
(P)
() 2 arctg(
2
)
Dezavantajul aproximrii Pad const n caracterul de sistem fr minim
de faz al modelului de ordin redus.
n procesul de sintez a legii de reglare trebuie inut cont de acest lucru
pentru a obine legi de reglare stabile.
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
111
4.2.3. Sistem n circuit nchis cu partea fix de ordinul nti cu timp
mort i regulator P
n condiiile exemplului anterior, se consider acum,
. (4.2.42) H
F
(s)
K
F
Ts + 1
e
s
Se obin,
(4.2.43) H
d
(s)
K
Ts +1
e
s
(4.2.44)
H
v
(s)
K e
s
Ts +1 + K e
s
K
(Ts + 1) e
s
+ K
Y(s)
V(s)
Relaia intrare-ieire n domeniul timp este exprimat printr-o ecuaie
difereniala de ordinul unu cu ntrziere.
Aceasta se poate obine din de exemplu, H
v
(s)
. [(Ts +1) + K e
s
] Y(s) K e
s
V(s)
Deoarece
e
s
Y(s) y(t )
se obine,
(4.2.45) y
.
(t)
1
T
y(t)
K
T
y(t ) +
K
T
v(t )
n acest caz ordinul ecuaiei difereniale (ordinul maxim de derivare), aici
unu, nu corespunde ordinului sistemului dinamic (numrul de informaii
suplimentare pentru restabilirea univocitii intrare-ieire) aici infinit.
Polii cu modul finit ai funciei de transfer sunt rdcinile ecuaiei H
v
(s)
(4.2.46)
(s) (Ts + 1) e
s
+ K 0
sau echivalent ale ecuaiei
(4.2.47)
L
v
(s) (Ts + 1) +K e
s
0
Rezolvarea pe cale analitic a acestor ecuaii este imposibil. De exemplu,
considernd , rezolvarea ecuaiei (4.2.47) nseamn rezolvarea s + j
sistemului de ecuaii (4.2.48) cu necunoscutele aparin : , R
(4.2.48)
'
1+ T + Ke
cos 0
T Ke
sin 0
care conduce la ecuaia:
(4.2.49) 1 +
T
ln
Ksin
T
+
T
tg
0 ,
1
ln
K sin()
T
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
112
Impunnd soluia , se pot determina ecuaiile (nu i soluiile) care 0
exprim perechile de valori pentru care ecuaia are poli pe axa ( K, ) s
imaginar
; . (4.2.50) j tg() T, K
1
cos()
i din acest exemplu se observ dificultatea analizei sistemelor cu timp
mort pe cale algebric.
Aproximarea exponenialei prin polinom de gradul nti conduce la
(4.2.51) H
v
(s)
K
T s
2
+ (T + ) s + K+ 1
H
v1
(T)
(s)
iar prin raional de ordinul nti conform dezvoltrii Pad conduce la
(4.2.52) H
v
(s)
K(1
2
s)
T
2
s
2
+ (T +(1 K)
2
)s + K+1
H
v1
(P)
(s)
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
113
4.2.4. Analiza n domeniul frecven a stabilitii sistemelor cu timp
mort n circuit nchis
Prin cele dou exemple prezentate se confirm dificultatea analizei
sistemelor cu timp mort pe cale algebric iar utilizarea unor modele aproximative
de ordin finit necesit o serie de precauiuni suplimentare pentru a nu trage
concluzii nerelevante.
Cel puin din punct de vedere al problemei stabilitii, metodele
frecveniale sunt cele mai recomandate.
Criteriul Nyquist de stabilitate, valabil i pentru sisteme cu timp mort n
structura din Fig.4.2.1. red uor i cu precizie condiiile de stabilitate inclusiv
rezerva de stabilitate msurat prin marginea de faz .
Considernd funcia de transfer n circuit deschis cu timp mort
(4.2.53) H
d
(s) H
d
(s) e
s
se poate analiza, folosind criteriul Nyquist de stabilitate, efectul timpului mort
asupra stabilitii n circuit nchis ca n Fig.4.2.4.
jQ
0
H (j )
d
H (j )
(-1,j0)
a)
P
jQ
0
H (j )
d
H (j )
d
(-1,j0)
c
c
3
2
1
3
2
1
c2
1
2
3
b)
P
Figura nr.4.2.4.
Aa cum se observ n Fig.4.1.12.a., marginea de faz a sistemului fr
timp mort este:
(4.2.54) +
d
(
c
)
unde s-a notat,
(4.2.55)
d
() argH
d
(j) (2, 0]
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
114
(4.2.56) A
d
() H
d
(j)
iar
c
este pulsaia de tiere maxim, soluia pozitiv maxim a ecuaiei
A
d
() 1
ci
(4.2.57)
c
max{
ci
,
ci
0, i 1, 2...}
Marginea de faz pentru sistemul cu timp mort este,
(4.2.58)
d
(
c
) +
d
(
c
)
c
c
Deoarece
(4.2.59) H
d
(j) H
d
(j)
pulsaia de tiere este aceeai pentru sistemul cu timp mort i pentru cel fr timp
mort.
Caracteristicile complexe i taie cercul de raz unitate H
d
(j) H
d
(j)
la aceleai pulsaii .
ci
Se definete noiunea de timp mort critic valoarea timpului mort ce
c
determin limita de stabilitate n circuit nchis, adic
=0, deci
(4.2.60)
c
c
n structura din Fig.4.2.4.a.,n care exist o singur pulsaie de tiere i
c
, (4.2.61) A
d
() < 1, >
c
, > 0
se poate face urmtoarea discuie referitoare la stabilitatea "sistemului cu timp
mort n circuit nchis " (STMCI):
<
c
: STMCI rmne stabil
=
c
: STMCI la limita de stabilitate`` (4.2.62)
>
c
: STMCI instabil
Dac H
d
(s) are mai multe pulsaii de tiere, de exemplu
c1
<
c2
<
c3
ca n
Fig.4.2.4.b., n care s-au precizat unghiurile
, (4.2.63)
i
+
d
(
ci
), i 1, 2, 3...
(marginea de faza este =
3
) se definesc valorile corespunztoare pentru timpul
mort critic:
, i=1,2,3,
c3
<
c2
<
c1
. (4.2.64)
ci
i
ci
Conform criteriului Nyquist, n funcie de valorile timpului mort, STMCI
poate fi i condiionat stabil astfel:
<
c1
: stabil
(
c2
,
c1
) : instabil (4.2.65)
(
c3
,
c1
) : stabil
>
c1
: instabil
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
115
4.2.5. Analiza stabilitii sistemului n circuit nchis folosind criteriul
Nyquist de stabilitate
Se consider
. (4.2.66) H
F
(s)
K
F
Ts + 1
e
s
(4.2.67) H
R
(s) K
R
(4.2.68)
K K
R
K
F
> 0
(4.2.69) H
P
(s) 0
Se calculeaz:
(4.2.70) H
d
(s) H
d
(s) e
s
K
Ts + 1
e
s
(4.2.71) A
d
() H
d
(j)
K
(T)
2
+ 1
A
d
() H
d
(j) ;
(4.2.72)
d
() arctg(T)
(4.2.73)
d
() arctg(T)
(4.2.74) A
d
() 1
c
K
2
1
T
, K 1
arctg( k
2
1 )
(4.2.75)
arctg( K
2
1 )
T
K
2
1
n Fig.4.2.5., sunt reprezentate caracteristicile complexe H
d
(j) i H
d
(j).
.
P
jQ
(-1,j0)
H (j )
d
d
H (j )
0
K
c
c
Figura nr.4.2.5.
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
116
Se observ c:
-pentru K [0,1] , STMCI este stabil pentru oricare T i .
-pentru K>1 , STMCI este stabil dac
. (4.2.76)
> 0
T
<
arctg K
2
1
K
2
1
n Fig.4.2.6. sunt reprezentate n planul : (K,
T
)
-limita de stabilitate care corespunde condiiei
=0
-condiia
4
-limita de stabilitate rezultat prin aproximarea Pad de ordinul unu.
n Fig.4.2.7. sunt reprezentate, pentru comparaie, caracteristicile complexe
de frecven H
d
(j), H
d
(j), H
1
d(T)
(j)-obinut prin trunchierea seriei Taylor i
H
1
d(P)
(j)-obinut prin aproximarea Pad de ordinul 1 a exponenialei : e
s
Limita de stabilitate
conform aproximarii
Pad de ordinul 1
STMCI=instabil
0
0
0.5
1
1.5
2
1 2 3 4 5
R F
T
0
/4
Figura nr.4.2.6.
(4.2.77) H
1
d(T)
(s)
K
(Ts + 1)
1
s + 1
(4.2.78) H
1
d(P)
(s)
K
(Ts + 1)
1
2
s
1 +
2
s
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
117
H (j )
d
H (j )
d
c
c
c
(-1,j0)
jQ
P
K
0
P
1
1
(T)
H (j )
d
(P)
H (j )
d
Figura nr.4.2.7.
Datorit pstrrii identitii modulului,
, (4.2.79) A
1
d(P)
() H
1
d(P)
(j)
K
(T)
2
+ 1
A
d
()
aproximarea Pad conduce la aceleai pulsaii de tiere ns corespunztoare
unghiului
,
argH
1
d(P)
(j)
1
d(P)
() arctg(T) 2arctg(
2
) > arctg(T)
d
()
astfel c (4.2.80)
. (4.2.81)
<
1
(P)
+
1
d(P)
(
c
)
Deci, condiia de stabilitate obinut prin aproximarea Pad nu este acoperitoare
fa de condiia exact. Oricum se obin soluii mult mai apropiate de realitate
fa de condiiile obinute prin utilizarea aproximrii prin trunchiere a seriei
Taylor care, n cazul de fa, indic stabilitate pentru orice K>0.
.
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
118
4.2.6. Concluzii privind comportarea sistemelor cu timp mort n
circuit nchis
Pe baza celor prezentate mai sus rezult o serie de concluzii privind
sistemele de reglare cu timp mort:
1. Sistemele n care timpul mort apare echivalent la intrarea sau ieirea
unor sisteme liniare invariabile n timp, sunt liniare i invariabile n timp,
permind descrierea n domeniul complex n particular frecvena.
2. Timpul mort nu afecteaz comportarea n regim staionar (dac se poate
obine un astfel de regim), fa de cazul n care nu apare timp mort.
3. Datorit timpului mort se inrutete proprietatea de stabilitate,
explicabil prin efectul de rotire n sens orar a caracteristicii complexe de
frecven n circuit deschis.
4. n general rspunsul fiind oscilant, asigurarea unor valori impuse pentru
suprareglaj i abaterea maxim reprezint performanele fundamentale ale unui
sistem de reglare automat cu timp mort (SRATM).
5. Dei liniare, SRATM sunt de ordin infinit, funciile de transfer nefiind
raionale. Din aceast cauz tratarea exact pe cale algebric este practic
imposibil. Se pot obine modele de ordin finit prin aproximarea exponenialei
complexe prin polinoame sau raionale. Se recomand utilizarea aproximrii e
s
Pad.
6. Aa cum rezult din relaia (24.27) stabilitatea STMCI devine cu att
mai senzitiv n raport cu valoarea timpului mort cu ct, la o aceeai margine de
faz a prii dinamice fr timp mort, pulsaia de tiere
c
este mai mare. Din
aceast cauz la SRATM creterea factorului de amplificare n circuit deschis
poate conduce foarte repede la instabilitate. Dei la sistemele fr timp mort
componenta derivativ n general reduce oscilabilitatea rspunsului, la SRATM
are efect contrar.
7. Pentru sinteza SRATM sunt indicate n practic urmtoarele metode:
a. Sinteza prin utilizarea unui model liniar de ordin finit.
b. Sinteza prin identificarea coeficienilor dezvoltrilor n serie
Taylor a funciilor de transfer.
c. Sinteza prin metode frecveniale.
d. Sinteza folosind predictoare Smith
4. SISTEME DE REGLARE 4.2. Sisteme cu timp mort
CU TIMP MORT n circuit nchis
119
4.3. Sinteza sistemelor de reglare cu timp mort
4.3.1. Sinteza sistemelor de reglare cu timp mort prin utilizarea unor
modele liniare de ordin finit
4.3.1.1. Formularea problemei
n principiu sinteza se realizeaz ca la sistemele fr timp mort, utiliznd
pentru partea fixat o funcie de transfer raionala H
*
F
(s)
(4.3.1) H
F
(s) H
F
(s)D
n
(s) H
F
(s) H
F
(s)e
s
obinut n urma aproximrii exponenialei printr-o raionala de forma e
s
(4.1.19) (4.1.25). Aproximarea este indicat cnd are valori mai mici dect
constantele de timp mari din H
F
(s).
Dac se folosete aproximarea (4.1.23),
(4.3.2)
D
n
(s)
1
(1+
n
s)
n
e
s
este necesar ca n 3, conducnd la creterea ordinului funciei de transfer H
*
F
(s),
cu consecine directe asupra complexitii legii de reglare.
Se recomand utilizarea acestei aproximri n sinteza parametric,
considernd o structur dat pentru legea de reglare, de exemplu PID. Se
determin parametrii legii de reglare astfel nct s se asigure anumii poli
dominani ai funciei de transfer n circuit inchis.
Considernd aproximrile de tip Pad sau raional (4.1.25) , n H
*
F
(s) apar
zerouri n semiplanul drept, care pot conduce la o lege de reglare cu poli n
semiplanul drept.
n acest caz este obligatoriu s se considere o funcie de transfer n circuit
nchis model , astfel nct toate zerourile funciei H
*
F
(s) din semiplanul H
v
(s)
drept s fie zerouri i pentru . H
v
(s)
Se noteaz prin P
+
(s) un polinom avnd toate rdcinile strict n semiplanul
drept (C
+
) iar prin P
-
(s) un polinom cu rdcinile n semiplanul stng (C
-
).
Dac
, (4.3.3) H
F
(s)
M
F
+
(s) M
F
(s)
L
F
(s)
se impune transpunerea performanelor n circuit nchis prin:
(4.3.4) H
v
(s)
M
v
(s) M
F
+
(s)
L
v
(s)
M
v
(s)
L
v
(s)
Se obine:
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
120
H
R
(s)
1
H
F
(s)
H
v
(s)
1 H
v
(s)
L
F
(s)
M
F
(s) M
F
+
(s)
M
v
(s) M
F
+
(s)
L
v
(s) M
v
(s)
(4.3.5) H
R
(s)
L
F
(s) M
v
(s)
M
F
(s) [L
v
(s) M
v
(s)]
Considerarea unei funcii de transfer far minim de faz necesit H
v
(s)
unele precauii n aplicarea relaiilor de transpunere deduse pentru sistemele cu
minim de faz.
4.3.1.2. Exemple de aproximri prin modele de ordin finit
Se considera
. (4.3.6) H
F
(s)
K
F
e
s
T
F
s + 1
, e
s
1
2
s
1 +
2
s
Rezult
H
F
(s)
K
F
(1
2
s)
(T
F
s +1) (1+
2
s)
M
F
(s)
L
F
(s)
(4.3.7) M
F
(s) K
F
; M
F
+
(s) s + 1,
2
< 0
Deoarece
, (p z)
H
F
2 1 1
s-ar putea alege astfel inct . H
v
(s) (p z)
H
v
1
Totui H
*
F
(s) reprezint o aproximare de ordin finit a unui sistem infinit
dimensional astfel c este recomandat ca excesul poli-zerouri pentru s fie H
v
(s)
ct mai mare.
Se alege
(4.3.8) H
v
(s)
n
2
(s + 1)
s
2
+2
n
+
n
2
M
v
(s) M
F
+
(s)
L
V
(s)
,
2
< 0
Aceast funcie de transfer corespunde structurii cu doi poli complex
conjugai i un zerou real (Cazul 3 din sinteza clasic fr timp mort), n care ns
zeroul este pozitiv i determinat de partea fixat a sistemului,
. (4.3.9) z
1
> 0
Folosind relaiile de la Cazul 3 n care ns era considerat , z
2
< 0
presupunem c s-au determinat valorile dorite ,
n
astfel nct o serie de
performane s fie ndeplinite.
Atunci
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
121
H
R
(s)
1
H
F
(s)
H
v
(s)
1 H
v
(s)
(T
F
s + 1) (
2
s + 1)
K
F
(1
2
s)
n
2
(1
2
s)
s (s + 2
n
+
n
2
2
)
H
R
(s)
n
2
K
F
(T
F
s + 1) (
2
s +1)
s (s + 2
n
+
n
2
2
)
Notnd,
, (4.3.10) T
1
1
(2
n
+
n
2
2
)
se obine
(4.3.11) H
R
(s)
n
2
T
1
K
F
(T
F
s + 1) (
2
s + 1)
s(T
1
s +1)
K
R
(
1
T
i
s
+
T
d
s + 1
T
s + 1
)
care corespunde unui element PID real n care:
(4.3.12) K
R
n
2
T
1
K
F
(T
F
+
2
T
1
)
(4.3.13) T
i
T
F
+
2
T
1
(4.3.14) T
d
T
F
2 (T
F
T
1
) +
(4.3.15) T
T
1
(4.3.16) T
1
1
(2
n
+
n
2
2
)
Daca este posibil s se calculeze T
1
=T
F
, atunci se obine o lege PI:
(4.3.17) H
R
(s)
n
2
T
1
K
F
2
s + 1
s
K
R
(1 +
1
T
i
s
)
unde: (4.3.18) K
R
n
2
T
1
K
F
2
(4.3.19) T
i
2
Dac se implementeaz legea de reglare (4.3.11), funcia de transfer n
circuit deschis exact este
(4.3.20) H
d
(s)
n
2
T
1
(
2
s + 1)
s(T
1
s +1)
e
s
n timp ce funcia de transfer model n circuit deschis folosit pentru calcul a fost
(4.3.21) H
d
(s)
H
v
(s)
1 H
v
(s)
n
2
T
1
(1
2
s)
s(T
1
s + 1)
Se observ c
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
122
(4.3.22) A
d
() H
d
(j)
n
2
T
1
2
4
2
+ 1
T
1
2
2
+ 1
A
d
() H
d
(j)
ns
(4.3.23)
d
() arg(H
d
(j))
2
arctg(T
1
) + (arctg
2
)
(4.3.24)
d
() arg(
^
H
d
(j))
2
arctg(T
1
) + (arctg
2
)
Diferena dintre cele dou caracteristici este:
(4.3.25) ()
d
()
d
() 2arctg
2
care este neglijabil pentru
. (4.3.26) <
1
() < 0.072rad
Aceast condiie este important pentru =
c
, pulsaia de tiere.
Verificarea corectitudinii rezultatelor obinute prin proiectarea pe model de
ordin finit se poate face prin trasarea caracteristicii complexe de frecven H
d
(j)
dat de relaia (4.3.20) i aplicarea criteriului Nyquist de stabilitate.
Folosind caracteristicile asimptotice se poate aprecia valoarea A
d
()
pulsaiei de tiere ca n Fig.4.3.1.
c
0.01
0.1
1
10
100
1000 1000
100
10
1
0.1
0.01
A ( )
d
A ( )
d
2T1
a)
> 2T
1
b)
c
n
2
1
T
n
2
2
n
2
2
n
2
1
T
1
1
1
1
2
-40dB/dec
-
2
0
d
B
/
d
e
c
-
2
0
d
B
/
d
e
c
-
2
0
d
B
/
d
e
c
-
2
0
d
B
/
d
e
c
0 dB/dec
Figura nr.4.3.1.
Din diagramele de mai sus se deduc valorile pulsaiei de tiere
c
, cu
aproximaia generat de caracteristicile asimptotice,
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
123
(4.3.27) 2T
1
c
'
n
2
T
1
,
n
1
T
1
n
,
n
1
T
1
,
2
_
,
n
2
2
,
n
2
(4.3.28) > 2T
1
c
'
n
2
T
1
,
n
<
2
T
1
n
2
2
,
n
2
T
1
Modelul de ordin finit este consistent n raport cu proprietatea de stabilitate
dac , ceea ce implic folosind relaiile de mai sus,
c
<
1
(4.3.29)
n
< min
1
T
1
,
2
Aceasta relaie reprezint o restricie n procesul de proiectare pentru acest
model de ordin finit.
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
124
4.3.2. Sinteza sistemelor de reglare cu timp mort prin identificarea
coeficienilor dezvoltrilor n serie a funciilor de transfer
4.3.2.1. Formularea problemei
Se exprim funcia de transfer a prii fixe H
F
(s) sub forma inversei unei
serii infinite de puteri n s,
(4.3.30) H
F
(s)
1
k0
c
k
s
k
, c
0
1
K
F
Dac H
F
(s) este o raional
, H
F
(s)
M
F
(s)
L
F
(s)
coeficienii c
k
se pot obine utiliznd algoritmul de mprire a polinomului L
F
(s)
prin M
F
(s). Dac M
F
(s) este o constant, seria apare ca un polinom cu gradul
polinomului L
F
(s).
n cazul sistemelor cu timp mort, se dezvolt exponeniala n serie de puteri, e
s
(4.3.31) e
s
k0
k
k!
s
k
i din identitatea
(4.3.32) L
F
(s)
k0
k
k!
s
k
M
F
(s)
k0
c
k
s
k
se obin expresiile coeficienilor . c
k
Valorile acestor coeficieni se pot obine pe cale experimental folosind
metoda momentelor. n particular,
(4.3.33) H
F
(s)
K
F
e
s
T
F
s + 1
1
L
F
(s)
1
1
K
F
+
+T
F
K
F
s +
2
+2T
F
2K
F
s
2
+
3
+3
2
T
F
6K
F
s
3
+ ...
n acelai mod se exprim funcia de transfer model , H
v
(s)
, (4.3.34) H
v
(s)
M
v
(s)
L
v
(s)
1
k0
a
k
s
k
1
L
v
(s)
. a
0
1 H
v
(0) 1
0
0
De asemenea, dac M
v
(s)=b
0
constant, atunci seria L
v
(s)
(4.3.34a) L
v
(s)
k0
a
k
s
k
este un polinom de grad finit. Notnd
, (4.3.35) a
1
,
k
a
k
a
1
, k 2 ,
0
1,
1
1
se exprim seria n forma normalizat, L
v
(s)
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
125
(4.3.36) L
v
(s)
k0
k
s
k
1+ s +
2
(s)
2
+
3
(s)
3
+ ...
n care coeficienii adimensionali
k
, se numesc coeficienii formei k 2
rspunsului n timpul adimensional
. t
t
Valoarea constantei de timp de normalizare determin viteza rspunsului
n timpul natural t. Cu ct este mai mare cu att rspunsul este mai lent i
reciproc.
4.3.2.2. Exemple de funcii de transfer model
n literatur sunt ntlnite numeroase funcii de transfer model n care
coeficienii formei,
k
, sunt calculai dup diferite criterii.
Constanta de normalizare se calculeaz n concordan cu modelul prii
fixe pentru a asigura o vitez de rspuns compatibil cu viteza de rspuns a prii
fixe.
a. Modelul Kitamori
(4.3.37) H
v
(s)
1
1+ s + 0.5(s)
2
+ 0.15(s)
3
+ 0.03(s)
4
b. Modelul Butterworth
(4.3.38) H
v
(s)
1
1+ s + 0.503(s)
2
+ 0.1479(s)
3
+ 0.02188(s)
4
c. Modelul binomial
(4.3.39) H
v
(s)
1
1+ s + 0.375(s)
2
+ 0.0625(s)
3
+ 0.003906(s)
4
d. Modelul ITAE minim Prin ITAE se nelege, ITAE
t (t) dt
(4.3.40) H
v
(s)
1
1+ s + 0.4664(s)
2
+ 0.1067(s)
3
+ 0.01882(s)
4
e. Modelul cu doi poli complex conjugai
(4.3.41) H
v
(s)
1
1+ s + (
1
4
2
)(s)
2
f. Modelul cu doi poli complex conjugai i un zerou real
(4.3.42) H
v
(s)
1+ b
1
s
1+ a
1
s + a
2
s
2
1
1 + s +
2
(s)
2
+
3
(s)
3
+... +
k
(s)
k
+ ...
, , (4.3.43) a
1
b
1
2
a
2
b
1
(a
1
b
1
)
2
k
(1)
k2
(
b
1
)
k
2
, k 3
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
126
4.3.2.3. Structuri echivalente n circuit nchis
Pentru o structura de reglare convenional trebuie satisfcut identitatea
(4.3.44) H
v
(s)
H
R
(s)H
F
(s)
1 + H
R
(s)H
F
(s)
H
v
(s)
care se exprim sub forma
(4.3.45)
1
H
v
(s)
1
1
H
F
(s)
1
H
R
(s)
Considernd inversele funciilor de transfer exprimate prin serii de puteri,
(4.3.46)
1
H
v
(s)
L
v
(s) 1+ s +
2
(s)
2
+
3
(s)
3
+ ... +
k
(s)
k
+
(4.3.47)
1
H
F
(s)
L
F
(s) q
0
+ q
1
s + q
2
s
2
+... + q
k
s
k
+ ...
(4.3.48)
1
H
R
(s)
L
R
(s) r
0
+ r
1
s + r
2
s
2
+... + r
k
s
k
+ ...
se obine identitatea
(4.3.49) L
v
(s) 1 L
F
(s) L
R
(s)
sau,
. (4.3.50) (L
v
(s) 1) H
R
(s) L
F
(s)
Cunoscnd i , prin identificare, se determin coeficienii r
k
ai L
v
(s) L
F
(s)
seriei . L
R
(s)
Dac expresia H
R
(s) este cunoscut, de exemplu o raional
(4.3.51) H
R
(s)
M
R
(s)
L
R
(s)
cu excepia unor parametrii care trebuie determinai, identitatea (4.3.45)
se exprim sub forma,
(L
v
(s) 1) H
R
(s) L
F
(s)
sau,
(4.3.52) M
R
(s) (L
v
(s) 1) L
R
(s) L
F
(s)
ntr-o problem de sintez neparametric, legea de reglare H
R
(s) este
exprimat prin seria . L
R
(s)
Coeficienii seriei apar ca funcii de , interpretat ca un parametru de L
R
(s)
proiectare, care trebuie s fie minim pentru a avea o vitez de rspuns maxim.
Cea mai dificil problem const n exprimarea legii de reglare
(4.3.52a) H
R
(s)
1
L
R
(s)
printr-o expresie cu un numr finit de termeni, n particular o raional.
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
127
Parametrul poate constitui un grad de libertate n realizarea acestei
exprimri.
Dac acest proces de exprimare nu se poate realiza exact, se determin
expresia cu un numr finit de termeni , n particular o raional, care s H
R
(s)
aproximeze cel mai bine, dup diferite criterii, seria de puteri .
1
L
R
(s)
n aceast situaie apare ca un parametru de aproximare optim.
n cazul sintezei parametrice, forma expresiei H
R
(s) este impus,
parametrii legii de reglare i constanta de timp rezult din condiia ca, ct mai
muli termeni n direcia creterii puterii variabilei s, s satisfac identitatea
(4.3.52).
n felul acesta, viteza de rspuns n circuit nchis, prin parametrul , este
adaptat la situaia real exprimat prin modelul dorit n circuit nchis i
parametrii prii fixe. Valoarea parametrului rezult dintr-o aa numit ecuaie
de nchidere.
Deoarece n identitatea (4.3.52) sunt satisfcui numai un numr finit de
termeni, nu se poate garanta efectul dinamicii necontrolate prin existena unui
numr infinit de termeni care nu satisfac aceast identitate.
Este important obinerea unei soluii stabile, care poate fi cercetat
folosind alte metode.
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
128
4.3.3. Relaii de acordare a unui regulator PID
Se consider un model al prii fixe de ordinul nti cu timp mort i un
model n circuit nchis exprimat prin coeficienii de form a rspunsului.
Se pune problema determinrii relaiilor ntre parametrii unei legi de
reglare PID i parmmetrii prii fixe pentru ca funcia de transfer a sistemului n
circuit nchis s asigure o anumit form a rspunsului (anumii coeficieni de
form impui).
Se consider:
(4.3.53) H
F
(s)
K
F
e
s
T
F
s + 1
1
L
F
(s)
unde este dat de relaiile (4.3.33) i (4.3.47). L
F
(s)
(4.3.54) H
v
(s)
1
L
v
(s)
unde este de forma (4.3.46), putnd include modelele (4.3.37) (4.3.43). L
v
(s)
(4.3.55) H
R
(s) K
R
(1 + T
i
s +T
i
T
d
s
2
)
T
i
s
(4.3.56)
M
R
(s) K
R
(1 +T
i
s + T
i
T
d
s
2
)
(4.3.57)
L
R
(s) T
i
s
Identitatea (4.3.52) devine
K
R
(1 + T
i
s + T
i
T
d
s
2
)(s +
2
2
s
2
+
3
3
s
3
+ ...) T
i
s(q
0
+ q
1
s +q
2
s
2
+ ..
(4.3.58)
astfel c se obin relaiile:
(4.3.59)
(1) K
R
T
i
q
0
(2) K
R
(T
i
+
2
2
) T
i
q
1
(3) K
R
(T
i
T
d
+
2
2
T
i
+
3
3
) T
i
q
2
(4) K
R
(
2
2
T
i
T
d
+
3
3
T
i
+
4
4
) T
i
q
3
(5) K
R
(
3
3
T
i
T
d
+
4
4
T
i
+
5
5
) T
i
q
4
(6) K
R
(
4
4
T
i
T
d
+
5
5
T
i
+
6
6
) T
i
q
5
........
(m) K
R
(
m2
m2
T
i
T
d
+
m1
m1
T
i
+
m
m
) T
i
q
m1
Din primele trei relaii, prin substituii succesive, se obin relaiile
(4.3.60)
T
i
K
R
q
0
(4.3.61) T
i
q
1
q
0
2
(4.3.62) T
i
T
d
q
2
q
0
2
q
1
q
0
+ (
2
2
3
)
2
din care se pot calcula parametrii K
R
, T
i
, T
d
n funcie de .
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
129
Satisfacerea relaiei a patra, m=4, impune, dup substituirea relaiilor
(4.3.60), (4.3.61), (4.3.62), obinerea unei ecuaii de gradul trei n
. (4.3.63) (
4
2
2
3
+
2
3
)
3
+ (
3
2
2
)
q
1
q
0
2
+
2
q
2
q
0
q
3
q
0
Aceasta este aa numita ecuaie de nchidere la rangul 4.
O condiie necesar pentru ca problema de sintez s aib soluie este ca
rdcina real a acestei ecuaii ,
(4.3.64) (
i
, q
i
, i 1, 2, ..)
sa fie strict pozitiv.
Substituind n (4.3.59) pentru numai relaia (4.3.60), m 4
ecuaia indice m, din setul (4.3.59) este de forma m 4
(4.3.65)
m
m1
+
m1
(T
i
)
m2
+
m2
(T
i
T
d
)
m3
q
m1
q
0
, m 4
Aceste relaii permit s se evalueze gradul de nemplinire a identitii
(4.3.52) pentru o soluie aleas. (, K
R
, T
i
, T
d
)
Folosind condiiile (4.3.61) i (4.3.62) n (4.3.65) respectiv pentru T
i
i
T
i
T
d
se obin condiiile de mai jos, valabile pentru , m 4
m
2
m1
+ (
2
2
3
)
m2
1
]
m1
+ (
m1
2
m2
)
q
1
q
0
m2
+
m2
q
2
q
0
m3
q
m
q
(4.3.66)
care este aa numita ecuaie de nchidere la rangul m cu . m 4
Se observ c folosind o lege de reglare PID cu 3 parametri se pot ndeplini
exact numai primele 4 condiii (4.3.59) dac pentru parametrul se alege o
soluie real pozitiv a ecuaiei de nchidere (4.3.63).
Trei condiii sunt asigurate prin cei trei parametri ai legii de reglare care
asigur o form a rspunsului determinat de numai trei coeficieni ai formei cu
valorile dorite:
2
,
3
,
4
.
A patra condiie este asigurat prin parametrul , care determin
rapiditatea rspunsului, compatibil cu forma exprimat de cei trei coeficieni
2
,
3
,
4
.
Din aceast cauz comportarea real a sistemului n circuit nchis va fi
descris printr-o funcie de transfer
(4.3.67) H
v
(s)
1
L
v
(s)
unde numitorul este o serie infinit,
(4.3.68) L
v
(s) 1 + s +
2
(s)
2
+
3
(s)
3
+
4
(s)
4
+
k5
k
(s)
k
n care puterile sunt asigurate de coeficienii de form dorii
2
,
3
,
4
i de k 4
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
130
valoarea .
n seria puterile pentru sunt asociate unor coeficieni care L
v
(s) k 5
k
verific ecuaiile de nchidere (4.3.66) pentru , n care s-a substituit m 5
dat de ecuaia de nchidere la rangul 4, (4.3.63).
Pentru o funcie de transfer a prii fixe dat (nominal), exprimat H
F
(s)
prin coeficienii , coeficienii de form
2
,
3
determin expresiile q
k
, k 0
parametrilor legii de reglare n funcie de parametrul , conform (4.3.60),
(4.3.61), (4.3.62),
K
R
q
0
(
q
1
q
0
2
) K
R
()
(4.3.69) T
i
q
1
q
0
2
T
i
()
T
d
q
2
q
0
2
q
1
q
0
+ (
2
2
3
)
2
q
1
q
0
2
T
d
()
Impunnd obinerea coeficientului de form
4
cu o valoare dorit i
satisfacerea relaiilor (4.3.69), se impune de fapt ecuaia de nchidere la rangul 4,
(4.3.63), care conduce la valoarea , aleas, din motive de timp de rspuns
minim, ca fiind cea mai mic soluie pozitiv.
Astfel parametrii legii de reglare sunt univoc determinai din (4.3.69),
; `; . (4.3.70) K
R
K
R
() T
i
T
i
() T
d
T
d
()
Dac se implementeaz legea de reglare cu parametrii dai de H
R
(s)
(4.3.70) i partea fix a sistemului are ns o funcie de transfer se obine o H
F
(s)
comportare n circuit nchis descris de o funcie de transfer care satisface H
v
relaia,
(4.3.71)
1
H
v
(s)
1
H
F
(s)
1
H
R
(s)
+ 1
1
L
v
(s)
unde
(4.3.72) L
v
(s) 1+ s +
2
(s)
2
+
3
(s)
3
+
4
(s)
4
+
k5
k
(s)
k
exprim o anumit form a acestui rspuns real.
Dac
(4.3.73) H
F
(s) H
F
(s)
atunci
(4.3.74)
k
k
2 k 4
valorile dorite ale coeficienilor de form, iar , se pot obine ca soluii
k
, k 5
ale ecuaiilor de nchidere la rangul m=k din relaiile (4.3.66) n care s-a substituit
,
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
131
k
(
2
q
1
q
0
1
)
k1
+ (
q
1
q
0
2
2
2
+
3
q
2
q
0
2
)
k2
+
q
k1
q
0
, k 5
(4.3.75)
Modelul trebuie astfel ales nct efectul apariiei coeficienilor n H
v
(s)
k
locul coeficienilor dorii s fie nesemnificativ.
k
, k 5
Dac se definete, pentru o lege de tip PID, numai cu trei coeficieni H
v
(s)
de form dorii,
, (4.3.76)
k
, 2 k 4 ,
k
0, k 5
i este o raional cu excesul poli zerouri H
F
(s)
(4.3.77) gr(L
F
) gr(M
F
) 5
atunci se obine
(4.3.78) H
v
(s) H
v
(s) ,
k
0, k 5
Alegnd pentru legea de reglare o structur cu mai muli parametri se pot
satisface mai multe condiii din (4.3.59). n particular, pentru funcia
, H
F
(s)
K
F
e
s
T
F
s+1
din (4.3.33) rezult
(4.3.79)
q
0
1
K
F
q
1
( + T
F
)
K
F
q
2
( + 2T
F
)
2K
F
q
3
2
( + 3T
F
)
6K
F
Pentru aceste expresii, relaiile (4.3.60), (4.3.61), (4.3.62), conduc la,
(4.3.80)
K
R
T
i
1
K
F
T
i
( + T
F
)
2
T
i
T
d
( + 2T
F
)
2
2
( +T
F
) + (
2
2
3
)
2
Folosind (4.3.79), (4.3.80), ecuatia (4.3.63) devine
(4.3.81) c
3
x
3
+ ( + 1)c
2
x
2
+ ( +2)c
1
x
2
( +3) 0
n care s-au notat,
; (4.3.82)
T
F
x
T
F
(4.3.83) c
1
3
2
c
2
6(
3
2
2
) c
3
6(
4
2
2
3
+
2
3
)
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
132
Modelul dorit in circuit nchis fiind dat, coeficientii c
1
, c
2
, c
3
sunt cunoscui
astfel ca se poate rezolva numeric ecuaia (4.3.81) pentru diferite valori ale
parametrului .
Soluiile pozitive se reprezint grafic n planul (x,) sub forma unor curbe
(x,).
Dac ecuaia are mai multe rdcini reale pozitive, se alege valoarea cea
mai mic, ceea ce corespunde alegerii modelului cel mai rapid posibil pentru acea
valoare a raportului .
T
F
Pentru a obine relaii de acordare mai simple, curba
(x,)=0
se aproximeaz prin drepte, valabile ntre anumite limite ale raportului [
1
,
2
]
, care exprim n final valorile raportului pentru care se pot aplica relaiile
T
F
de acordare deduse
(4.3.84) x a + b , [
1
,
2
]
adica,
. (4.3.85) a + bT
F
,
T
F
[
1
,
2
]
De exemplu, pentru:
- Modelul Kitamori a=1.371 b=0
1
=0.1
2
=10 (4.3.86)
- Modelul binomial a=4.00 b=8
1
=0.5
2
= 3 . (4.3.87)
Substituind n relaiile (4.3.80) parametrul prin aproximat prin (4.3.85)
se obin relaiile de acordare a parametrilor K
R
, T
i
,T
d
, n funcie de K
F
, T
F
, i
valorile raportului pentru care se pot aplica aceste relaii.
T
F
Aceste relaii de acordare apar sub forma unor expresii raionale n K
F
, T
F
, care uneori se aproximeaza prin expresii ct mai simple dac valorile
numerice ale unor coeficienti permit acest lucru.
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
133
4.3.4. Relaii de acordare a unui regulator PI
Se consider un model al prii fixe de ordinul nti cu timp mort i un
model n circuit nchis exprimat prin coeficienii de form a rspunsului.
Se pune problema determinrii relaiilor ntre parametrii unei legi de
reglare PI i parmmetrii prii fixe pentru ca funcia de transfer a sistemului n
circuit nchis s asigure o anumit form a rspunsului (anumii coeficieni de
form impui).
Se considera H
F
(s) dat de (4.3.33), (4.3.47) i dat de (4.3.46). Aici H
v
(s)
ns, H
R
(s) K
R
(1+
1
T
i
s
)
(4.3.88) M
R
(s) K
R
(1 +T
i
s)
L
R
(s) T
i
s
Datorit componentei integrale se poate alege un model de forma H
v
(s)
(4.3.46) care asigur . H
v
(0) 1
Identitatea (4.3.52) devine
(4.3.89) K
R
(1 + T
i
s)(s +
2
(s)
2
+
3
(s)
3
+ ...) T
i
s(q
0
+ q
1
s + q
2
s
2
+ ...)
astfel c se obin relaiile
(4.3.90)
(1) K
R
T
i
q
0
(2) K
R
(T
i
+
2
2
) T
i
q
1
(3) K
R
(
2
2
T
i
+
3
3
) T
i
q
2
(4) K
R
(
3
3
T
i
+
4
4
) T
i
q
3
...
(m) K
R
(
m1
m1
T
i
+
m
m
) T
i
q
m1
...
Deoarece legea de reglare conine numai doi parametri, din primele doua
ecuaii (4.3.90) se exprima K
R
,T
i
n funcie de iar din ecuaia a treia se obine o
ecuaie de gradul doi in ,
(4.3.91)
K
R
T
i
q
0
(4.3.92) T
i
q
1
q
0
2
(4.3.93) (
3
2
2
)
2
+
2
q
1
q
0
q
2
q
0
0
Substituind din (4.3.33), parametrii
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
134
, (4.3.94)
q
0
1
K
F
q
1
( + T
F
)
K
F
q
2
( + 2T
F
)
2K
F
ecuatia (4.3.93) devine
(4.3.95) c
2
x
2
+ c
1
( +1)x ( + 2) 0
unde,
; (4.3.96)
T
F
x
T
F
(4.3.97) c
1
2
2
c
2
2(
3
2
2
)
Rezolvnd ecuaia (4.3.95) pentru diferite valori ale raportului se
reprezint soluia real pozitiv
(4.3.98) x x
T
F
printr-o curb
(x,)=0
care dac se aproximeaz printr-un segment de dreapt conduce la
(4.3.99) x a + b , [
1
,
2
]
adic,
. (4.3.100) a + bT
F
,
T
F
[
1
,
2
]
Substituind din (4.3.91) , (4.3.92) prin (4.3.100) se obin relaiile de
acordare ale unui regulator PI.
In acest caz numai primele 3 ecuaii din setul (4.3.90) sunt satisfacute,
asigurnd o funcie de transfer n circuit nchis real
, (4.3.101) H
v
(s)
1
L
v
(s)
unde:
(4.3.102) L
v
(s) 1 + s +
2
2
s
2
+
3
3
s
3
+
k4
k
s
k
coeficienii , fiind determinai din ecuaiile din setul (4.3.90) pentru
k
, k 4
, prin relatiile m 4
(4.3.103) (
k
2
m1
)
(m1)
+
m
q
1
q
0
(m2)
q
m1
q
0
0 , m 4,
3
3
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
135
Observaie.
Pentru o lege de reglare fr component integratoare,de exemplu P sau
PD:
1. Dac partea fixat are caracter integrator (q
0
=0) se poate folosi o funcie H
v
(s)
dat de (4.3.46) n care . H
v
(0) 1
2. Dac nu are caracter integrator (q
0
0) atunci se alege H
F
(s)
(4.3.104) H
v
(s)
1
L
v
(s)
unde
(4.3.105) L
v
(s)
0
+ s +
2
(s)
2
+
3
(s)
3
+ ...
3. Coeficientul
0
exprim eroarea staionar de poziie relativ impus
0
rel
apriori
. (4.3.106)
0
1
(1
0
rel
)
4. SISTEME DE REGLARE 4.3. Sinteza sistemelor de reglare
CU TIMP MORT cu timp mort
136
4.4. Sisteme de reglare cu predictor Smith
4.4.1. Formularea problemei
Sistemele cu predictor Smith intr n categoria sistemelor care folosesc un
model matematic al procesului condus, pentru a putea "prezice" anumite evoluii,
n scopul aplicrii unor comenzi adecvate.
Aceste ssiteme au fost ulterior dezvoltate de Manfred Morrari n aa
numitele sisteme predictive cu model intern (Internal Model Predictive Control).
Se consider un sistem de reglare cu structura din Fig.4.4.1., n care
procesul condus are timp mort, de valoare , ce poate fi echivalat la ieire.
Dac procesul condus este liniar, partea fix a sistemului poate fi H
F
(s)
echivalat printr-o funcie de transfer raional (deci f timp mort) i un H
F
(s)
element de ntrziere pur , e
s
. (4.4.1) H
F
(s) H
F
(s) e
s
Dac ar fi disponibil punctul A al conexiunii celor dou elemente, cruia i
corespunde o variabil notat , atunci ar avea loc relaiile, y
(t)
(4.4.2) Y(s) e
s
Y
(s) y(t) y
(t )
adic mrimea reglat are valoarea pe care a avut-o mrimea deci apare y(t) y
(t)
cu o ntrziere de secunde.
De fapt, datorit structurii fizice a procesului condus, orice modificare a
mrimii de comand va determina un efect la ieire numai dup u(t) y
R
(t)
secunde.
nlocuind n relaia (4.4.2), se obine echivalent t t
(4.4.3) y
(t) y(t + )
adic valoarea a mrimii intermediare este egal cu valoarea pe care o va y
(t)
avea mrimea reglat dupa secunde, deci se poate interpreta ca fiind predicia y
cu secunde a mrimii de ieire . y
e
s
+
y(t)
(t)
v(t) y (t)=u(t)
R
H (s)
F
H (s)
R
y(t)
~
H (s)
F
y(t) = y(t+ )
~
y(t) = y(t- )
~
A
H (s)
v
Figura nr.4.4.1.
4. SISTEME DE REGLARE 4.4. Sisteme de reglare
CU TIMP MORT cu predictor Smith
137
n cazul de fa este analizat numai comportarea n raport cu mrimea
impus , comportarea n raport cu o perturbaie putndu-se analiza asemntor v(t)
Modelul fiind liniar, prin utilizarea unei legi de reglare liniar se H
R
(s)
asigur, pentru structura din Fig.4.4.1., o comportare n circuit nchis desris prin
funcia de transfer n circuit nchis cu timp mort, , H
v
(s)
(4.4.4) H
v
(s)
Y(s)
V(s)
H
R
(s) H
F
(s) e
s
1 + H
R
(s) H
F
(s) e
s
Se obine astfel expresia care d evoluia mrimii reglat,
(4.4.5) Y(s) H
v
(s) V(s)
Din pcate nu este o raional i nu beneficiaz de tehnicile de H
v
(s)
sintez a sistemelor fr timp mort, tehnici bazate pe raionale.
Dac se ncerc aproximarea funciei de transfer cu o raional, este H
v
(s)
greu de asigurat stabilitatea sitemului n circuit nchis, pentru valori nu prea mici
ale timpului mort,.
4.4.2. Structuri echivalente n circuit nchis
Ideea fundamental foarte simpl, dezvoltat de Smith, const n utilizarea
unei structuri echivalent n circuit nchis, de forma indicat n Fig.4.4.2.
Dac punctul A ar fi fost accesibil i mrimea msurat, atunci s-ar fi y
(t)
putut realiza un sistem n circuit nchis ca n Fig.4.4.2. cu o lege de reglare liniar
. H
R
(s)
e
s
+
y(t)
(t)
v(t)
y (t)=u(t)
R
H (s)
F
y(t)
~
y(t)
~
y(t) = y(t- )
~
A
H (s)
v
~
H (s)
R
~
Figura nr.4.4.2.
Funcia de transfer n circuit nchis ntre mrimile i este v y
. (4.4.6) H
v
(s)
Y
(s)
V(s)
H
R
(s) H
F
(s) e
s
1 + H
R
(s) H
F
(s) e
s
astfel c se obine structura echivalent din Fig.4.4.3.
e
s
y(t)
v(t) y(t)
~
y(t) = y(t- )
~
A
H (s)
v
~
Figura nr.4.4.3.
4. SISTEME DE REGLARE 4.4. Sisteme de reglare
CU TIMP MORT cu predictor Smith
138
Folosind tehnicile de la sistemele fr timp mort, pentru structura standard
de sistem convenional de mai sus, se poate calcula expresia funciei de transfer
astfel nct mrimea fictiv s aib o form dorit de evoluie n timp, H
R
(s) y
(t)
exprimat n domeniul complex prin relaia,
. (4.4.7) Y
(s) H
v
(s) V(s)
Avnd n vedere relaia (4.4.2), i ieirea real , are o aceeai form de y(t)
evoluie ca i dar ntrziat cu secunde, aa cum este ilustrat n Fig.4.4.4., y
(t)
adic,
(4.4.8) Y(s) H
v
(s) e
s
V(s)
v(t)
y(t)
t
y(t)
~
y(t)
~
y(t) = y(t- )
~
y(t)
Figura nr.4.4.4.
Impunnd comdiia de echivalen ca expresia ieirii dat de (4.4.5) i Y(s)
(4.4.8) s fie aceeai pentru oricare intrare se obine V(s)
(4.4.9) H
v
(s) H
v
(s) e
s
care, innd cont de (4.4.4) i (4.4.6) devine
(4.4.10)
H
R
(s) H
F
(s) e
s
1 + H
R
(s) H
F
(s) e
s
H
R
(s) H
F
(s) e
s
1 +H
R
(s) H
F
(s) e
s
Din aceasta se deduce expresia legii de reglare ce asigur la ieire un H
R
(s)
rspuns de forma dorit dar ntrziat cu secunde, y
(t)
(4.4.11) H
R
(s)
H
R
(s)
1+ H
R
(s) H
F
(s) [1 e
s
]
Aceasta este legea de reglare ce trebuie implementat fizic, i se numete
legea de reglare de tip predictor Smith.
4. SISTEME DE REGLARE 4.4. Sisteme de reglare
CU TIMP MORT cu predictor Smith
139
4.4.3. Forme de implementare a legii de reglare de tip predictor
Smith
Legea de reglare de tip predictor Smith dat de (4.4.11), este o expresie
transcendent la numitor, dificil de implementat n mod direct.
Exist mai multe variante de interpretare a relaiei (4.4.11) n vederea
implementrii.
Cel mai des se consider c expresia (4.4.11) este rezultatul unei conxeiuni
cu reacie negativ ce are pe calea direct funcia de transfer iar pe calea de H
R
(s)
reacie expresia , aa cum este ilustrat i n Fig.4.4.5. H
F
(s) [1 e
s
]
+ +
y(t)
(t)
v(t) y (t)=u(t)
R
y(t)
~
H (s)
R
H (s)
F
H (s)
F
e
s
H (s)
F
[1- ]
e
s
q(t)
w(t)
H (s)
R
~
Figura nr.4.4.5.
Mrimea intern de reacie (cu transformata Laplace ) din blocul q(t) Q(s)
regulator , se poate exprima n domeniul complex, innd cont c H
R
(s)
, (4.4.12) y
R
(t) u(t) Y
R
(s) U(s)
sub forma,
. (4.4.13) Q(s) H
F
(s) Y
R
(s) H
F
(s) e
s
U(s)
Deoarece mrimea de ieire este Y(s)
(4.4.14) Y(s) H
F
(s) e
s
U(s)
se poate scrie mrimea de reacie intern,
(4.4.15) Q(s) H
F
(s) Y
R
(s) Y(s)
astfel c intrarea n blocul regulator , w(t) H
R
(s)
(4.4.16) W(s) V(s) Y(s) Q(s)
este
(4.4.17) W(s) V(s) Y(s) [ H
F
(s) Y
R
(s) Y(s) ]
(4.4.18) W(s) V(s) H
F
(s) Y
R
(s)
ceea ce nseamn o structur n circuit deschis n raport cu mrimea prescris v(t)
aa cum este ilustrat n Fig.4.4.6., structur inacceptabil n practic, care
nseamn de fapt implementarea direct a formei din Fig.4.4.3.
4. SISTEME DE REGLARE 4.4. Sisteme de reglare
CU TIMP MORT cu predictor Smith
140
+
y(t)
v(t)
y (t)=u(t)
R
y(t)
~
H (s)
F
H (s)
F
e
s
H (s)
F
w(t)
H (s)
R
~
H (s)
F
H (s)
v
~
Figura nr.4.4.6.
Pentru a menine caracterul de sistem cu reacie, se consider c mrimea
de reacie intern este obinut folosind expresii model pentru i q(t) H
F
(s)
adic respectiv . n aceste condiii, H
F
m
(s) ,
m
Q(s) H
F
m
(s) Y
R
(s) H
F
m
(s) e
m
s
U(s)
Notm prin
Y
m
(s) H
F
m
(s) e
m
s
U(s) H
F
,m
(s) U(s)
mrimea de ieire din modelul prii fixe a sistemului
H
F
,m
(s) H
F
m
(s) e
m
s
n acest variant, mrimea de intrare n blocul regulator , dat W(s) H
R
(s)
de (4.4.16), este,
W(s) V(s) Y(s) [ H
F
m
(s) Y
R
(s) H
F
m
(s) e
m
s
U(s) ]
W(s) V(s) H
F
m
(s) Y
R
(s) [Y(s) Y(s) ]
care determin structura sistemului de forma ilustrat n Fig.4.4.7., ce reprezint
structura clasic a unui sistem cu predictor Smith.
H (s)
F
+ +
+
y(t) y(t)
v(t)
y (t)=u(t)
R
y(t)
~
y(t)
~
H (s)
F
H (s)
F
m
H (s)
F
m
e
s
w(t)
H (s)
R
~
H (s)
F
, m
e
s
m
y (t)
m
y(t) y (t)
m
y(t) y (t)
m
Blocul regulator Smith
Figura nr.4.4.7.
Se observ c circuitul de reatie intervine numai prin diferena dintre
ieirea real i cea a modelului. Probleme deosebita apar dac sunt nepotriviri
ntre model i realitate(mismatching process).
4. SISTEME DE REGLARE 4.4. Sisteme de reglare
CU TIMP MORT cu predictor Smith
141
5. SISTEME ADAPTIVE DE REGLARE AUTOMAT
5.1. Structuri de reglare adaptiv
5.1.1. Introducere
5.1.1.1. Structura general a sistemelor adaptive
n sistemele de reglare obinuite legea de conducere se calculeaz pentru
ndeplinirea unui set de performane considernd c obiectul condus are un model
matematic invariant n timp.
Dac modelul matematic sau caracteristicile semnalelor se modific, legea
de reglare respectiv nu mai conduce la performane satisfctoare.
Prin sistem adaptiv (SA) se nelege un sistem prevzut cu mijloace de
evaluare continu a propriilor indicatori de calitate ai evoluiei i cu mijloace IC
de ajustare a propriilor parametrii i/sau structur astfel nct s se asigure n
permanen o comportare dorit sau o comportare optim.
Structura general a oricrui sistem adaptiv este prezentat n Fig.5.1.1.
Intrri
impuse
(referine)
Perturbaii
nemsurabile
Perturbaii
msurabile
Sistem
Mecanism de
ajustare
(MAj)
IC(impui) IC(msurai)
IC
Ieire
Evaluarea IC
ai evoluiei
y
ajustabil
SAj )
Comparare
i
decizie
IC=indicatori de calitate
Figura nr.5.1.1.
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
142
5.1.1.2. Clasificarea sistemelor adaptive
Exist dou categorii principale de sisteme adaptive:
1. Sisteme adaptive parametrice, cnd se ajusteaz parametrii i/sau
structura sistemului pentru meninerea setului de performane;
2. Sisteme numite sintetizatoare de semnal, la care adaptarea se
efectueaz prin aplicarea unor intrri special sintetizate.
Sistemele adaptive se pot clasifica dup diferite criterii de clasificare ca
de exemplu:
a. Dup caracteristicile informaiilor
a.1. Sisteme adaptive deterministe
a.2. Sisteme adaptive stochastice
b. Dup structura modului de adaptare
b.1. Sisteme adaptive cu parametri programabili (gain scheduling)
b.2. Sisteme adaptive cu model etalon (model de referin)
b.3. Sisteme adaptive cu autoacordare
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
143
5.1.2. Sisteme adaptive cu parametri programabili (gain scheduling)
5.1.2.1. Structura sistemelor adaptive cu parametri programabili
Dup unele definiii, sistemele cu parametri programabili nu se ncadreaz
n categoria sistemelor adaptive propriuzise.
Astfel de structuri adaptive se pot aplica la sisteme n care modificarea
unor parametri ai obiectului condus are loc conform unor legi (expresii) cunoscute
apriori, ca funcii de mrimi din proces, ce pot fi msurate sau reconstituite.
Aceste mrimi pot fi: 1. perturbaiile msurabile; 2. mrimea de comand a
obiectului condus; 3. mrimea de ieire din obiectul condus.
n particular se consider c relaiile de adaptare sunt valabile numai n
regim staionar.
Cunoscnd aceste dependene se modific parametrii legii de reglare
printr-un Bloc de ajustare, ca n Fig.5.1.2. pe baza unor mrimi generate de un
aa numit Bloc de evaluare astfel nct s se menin constante anumite
caracteristici.
Deoarece modificarea parametrilor legii de reglare poate induce regimuri
tranzitorii noi, care perturb comportarea normal a sistemului, aceste modificri
trebuiesc efectuate suficient de lent.
Blocul de ajustare primete valorile dorite ale parametrilor i realizeaz
modificarea acestor parametri cu o anumit vitez de variaie, de exemplu sub
forma unor rampe cu pante prescrise (funciune de tip auto-ramping).
n toate structurile adaptive de tip parametri programabili se consider, i
se asigur prin implementri adecvate, c modificarea parametrilor legii de
reglare se efectueaz suficient de lent nct s fie practic considerai constani n
raport cu regimurile tranzitorii determinate de variaiile perturbaiilor i ale
mrimii impuse. n felul acesta rmne valabil descrierea sitemului prin
funcii de transfer care sunt specifice sistemelor invariante in timp.
Intrri impuse
(referine)
Perturbaii
nemsurabile
Perturbaii
msurabile
Ieire
Ieire
ajustare
Regulator
r = v
Bloc de
Bloc de
evaluare
Proces
condus
ms
y
y
Mrimea de
comand
reglat
msurat
Figura nr.5.1.2.
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
144
5.1.2.2. Structur adaptiv cu compensarea parametrilor n raport cu o
perturbaie
n aceast structur valorile parametrilor legii de reglare depind numai de
valorile unor perturbaii.
Se asigur astfel o compensare n circuit deschis care nu provoac oscilaii
suplimentare altele dect cele determinate de dinamica sistemului considerat cu
parametrii constani.
Schema bloc general a acestei structuri este prezentat n Fig.5.1.3.
Perturbaii
nemsurate
Perturbaii
msurate
Regulator
r = v
ajustare
Bloc de Bloc de
evaluare
Proces
condus
y
Mrime de
comand
Mrime de reacie
Mrime impus
Figura nr.5.1.3.
De exemlu, dac procesul condus, echivalat prin partea fix, este descris
printr-o funcie de transfer de ordinul nti cu timp mprt
(5.1.1) H
F
(s)
K
F
e
s
T
F
s + 1
unde parametrii depind de perturbaii notate printr-un vector K
F
, T
F
, q
(5.1.2) p [ p
1
, ... , p
q
]
T
, p p(t)
prin relaii analitice cunoscute,
(5.1.3) K
F
K
F
(p)
(5.1.4) T
F
T
F
(p)
(5.1.5)
(p)
iar n urma procesului de sintez se determin parametrii legii de reglare, de
exemplu ca i funcii de parametrii , K
R
, T
i
, T
d
K
F
, T
F
,
(5.1.6) K
R
F
K
R
(K
F
, T
F
, )
(5.1.7) T
i
F
T
i
(K
F
, T
F
, )
(5.1.8) T
d
F
T
d
(K
F
, T
F
, )
atunci,folosind (5.1.3),(5.1.4),(5.1.5), blocul de ajustare trebuie s asigure valorile
(5.1.9) K
R
F
K
R
(p) F
K
R
(
K
F
(p) ,
T
F
(p),
(p))
(5.1.10) T
i
F
T
i
(p) F
T
i
(
K
F
(p) ,
T
F
(p) ,
(p)
(5.1.11) T
d
F
T
d
(p) F
T
d
(
K
F
(p) ,
T
F
(p) ,
(p)
Evident chiar dac are o variaie n timp rapid, blocul de ajustare p p(t)
trebuie s realizeze modificrile parametrilor foarte lent ctre valorile date de
relaiile (5.1.9), (5.1.10), (5.1.11).
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
145
5.1.2.3. Exemplu: Structur adaptiv cu compensarea parametrilor n raport
cu o perturbaie la o instalaie termic
Se consider un sistem de reglare a temperaturii la care mrimea de
comand este debitul de combustibil. La un astfel de obiect condus, factorul de
amplificare al prii fixe este proporional cu puterea calorific a K
F
combustibilului , p p
c
(5.1.12) K
F
K
1
p
Presupunem c anumite performane sunt ndeplinite dac factorul de
amplificare n circuit deschis este constant i are o valoare optim , K
d
K
. K
d
K
R
K
F
K
Dac puterea clorific se modific, factorul de amplificare n circuit
deschis poate fi meninut la o valoare dorit dac, K
d
K K
R
(K
1
p) K
adic se asigur un factor de proporionalitate dorit al legii de reglare cu K
R
valoarea (5.1.13) K
R
K
K
1
1
p
care poate fi interpretat ca un semnal variabil n timp
(5.1.14) K
R
K
K
1
1
p
K
K
1
1
p(t)
K
R
(t)
Se poate implementa o structur de tip autoramping prin care valoarea
real a factorului de proporionalitate s tind, sub forma unei rampe n timp, K
R
ctre valoarea dat de (5.1.14). K
R
(t)
O form simpl de implementare este prezentat n Fig.5.1.4. prin care se
ajusteaz o amplificare suplimentar fa de valoarea setat n reglator ca element
fizic. Presunem c n regulator este setat valoarea . Semnalul de ieire din K
R
legea de reglare este nmulit cu un factor astfel c se asigur un factor de
R
proporionalitate pentru legea de reglare care trebuie meninut la valoarea K
R
R
dorit dat de (5.1.14), adic K
R
(5.1.15) K
R
R
K
R
R
K
R
K
R
1
K
R
K
K
1
1
p
Figura nr.5.1.4.
1 1
^
K
p
K
R
R
K
1
=
K
R
y = y(t) v = v(t)
+
- Element de nmulire
H (s)
R
H (s)
F
p = p(t)
y=
o
C
p = p
c
R
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
146
5.1.2.4. Structur adaptiv cu compensarea parametrilor n raport cu
mrimea de comand
n aceast structur parametrii legii de reglare depind de mrimea de ieire
din elementul de execuie i are ca scop compensarea neliniaritii caracteristicii
acestuia.
Dac elementul de execuie de exemplu are o caracteristic static puternic
neliniar de forma
(5.1.16) Y
EE
F
EE
(U
EE
)
se poate deduce panta acestei caracteristici n funcie de mrimea sa de ieire Y
EE
(5.1.17) K
EE
K
EE
(Y
EE
)
aa cum este ilustrat, de exemplu, n Fig.5.1.5.
U
EE
Y
EE
Y
EE
K
EE
Y
EE
2
U
max
Y
EE
max
Y
EE
max
U
EE
min
Y
EE
min Y
EE
min
K
EE
2
K
EE
3
K
EE
1
Y
EE
2
U
EE
2
Y
EE
1
Y
EE
1
U
EE
1
U
EE
Y
EE
F
EE
( ) =
Y
EE
K
EE
EE
( ) =
Figura nr.5.1.5.
Factorul de amplificare al prii fixe
(5.1.18) K
F
K
1
K
EE
K
1
K
EE
(Y
EE
)
este astfel exprimat ca o funcie de marimea de execuie . Y
EE
Dorim ca factorul de amplificare n circuit deschis s aib o valoare K
d
dorit K
(5.1.19) K
d
K
R
K
F
K
astfel c, innd cont de (5.1.18), trebuie asigurat legea de reglare cu factorul de
proporionalitate dorit K
R
. (5.1.20) K
R
K
K
1
K
EE
(Y
EE
)
F
K
R
(Y
EE
)
Ca i n cazul anterior, se poate realiza o implementare prin corecie
multiplicativ, cu un factor , a valorii existent , n care se folosete ns
R
K
R
valoarea momentan a mrimii de execuie astfel c valoarea dorit y
EE
(t)
(5.1.20) devine o funcie de timp
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
147
(5.1.21) K
R
K
K
1
K
EE
(y
EE
(t))
F
K
R
(y
EE
(t)) K
R
(t)
i (5.1.22) K
R
R
K
R
(t)
R
(t)
K
R
(t)
K
R
1
K
R
F
K
R
(y
EE
(t))
aa cum este ilustrat i n Fig.5.1.6.
K
R
y = y(t)
v = v(t)
+
-
Element de
nmulire
H (s)
R
R
E E IT+TR
y
EE
u
EE
u
EE
= (t)
u
EE
y
EE
y
EE
= (t)
1
K
R
R
=
KR
y
EE
F ( )
Figura nr.5.1.6.
Se observ c pe lng bucla sistemului propru-zis de reglare, apare o bucl
n circuit nchis suplimentar, specific procesului de adaptare. Datorit
discontinuitii caracteristicii care detemin discontinuitatea K
EE
K
EE
(Y
EE
)
relaiei (5.1.22), pot apare oscilaii ntreinute determinate de circuitul de adaptare
n aceast form de implementare.
De exemplu n jurul punctului apare echivalentul unei reacii ( U
EE
1
, Y
EE
1
)
negative i bucla de adaptare se comport ca i un sistem de reglare bipoziionala
care caut s menin acest punct de funcionare. Dac crete , panta y
EE
K
EE
crete, factorul scade, intrarea scade care face ca sa scad.
R
u
EE
y
EE
Se spune c bucla de adaptare acapareaz, "aga", acest punct. n schimb,
n jurul punctului apare echivalentul unei reacii pozitive i acest ( U
EE
2
, Y
EE
2
)
punct nu este "agat".
Fenomenul de agare apare datorit discontinuitii relaiei (5.1.22). Exist
nenumrate tehnici de evitare a fenomenului de agare, ca de exemplu utilizarea
unei structuri de tipul autoramping.
Se poate folosi pentru corecie mrimea de intrare n elementul de execuie
, mai simplu de implementat deoarece nu necesit un circuit suplimentar u
EE
y
R
de msurare, ns utilizarea mrimii de ieire d informaii reale despre y
EE
comportarea elementului de execuie, nu valori simulate. Evident, n acelai mod
pot fi adaptai i ali parametrii ai legii de reglare.
Toate aceste structuri de adaptare de tip gain scheduling, sunt foarte simple
i robuste ns presupun o cunoatere precis dependenelor dintre parametrii
modelului matematic i mrimile msurate.
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
148
5.1.3. Structur de reglare adaptiv cu model de referin
Structura general a oricrui Sistem Adaptiv cu Model de Referin
(SAMR) este asemntoare cu cea prezenta n Fig.5.1.7.
y
M
Model de
referin
(etalon)
v=r
+ -
y
P
Mecanism
de ajustare
Regulator
Proces
condus
SISTEM AJUSTABIL
y=y
P
e
Figura nr.5.1.7.
n cadrul unui SAMR se urmrete ca ieirea
a procesului condus n y
P
cadrul sistemului de reglare, denumit generic Sistemul Ajustabil (SAj), s tind
asimptotic ctre ieirea unui model de referin (etalon).
n SAMR de mai sus mulimea dat a , din Fig.5.1.1., este nlocuit prin IP
modelul etalon care este comandat prin aceeai intrare ca i sistemul ajustabil.
Comparaia dintre dat i cel msurat este obinut direct comparnd
i . IP y
M
y
P
Eroarea dintre rspunsul modelului i cel al sistemului ajustabil,
(5.1.23) e(t) y
M
(t) y
P
(t)
este folosit n Mecanismul de Ajustare (MAj) pentru modificarea parametrilor
regulatorului cu scopul de a minimiza acest eroare.
Deoarece scopul adaptrii aici l constituie modificarea valorilor unor
parametri, pe o structur data, nseamn c i aceste sisteme fac parte din
categoria sitemelor adaptive parametrice, n particular sisteme adaptive
parametrice cu model etalon.
O astfel de structur de SAMR realizeaz o aa numit adaptare direct
deoarece se actualizeaz n mod direct valorile unor parametrii (n particular
parametrii legii de reglare) astfel nct s se minimizeze un criteriu de clitate care
msoara eroarea dintre ieirea modelului i ieirea sistemului ajustabil care sunt
funcii pe . R
Trebuie menionat faptul c relaia (5.1.23) d valoarea la un moment dat
de timp a erorii dar se pot utiliza multe alte forme de a msura eroarea dintre
dou funcii ( de fapt norme ale funciei . e : R R
n
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
149
5.1.4. Structur de reglare adaptiv cu regulatoare autoacordabile
O a treia metod de ajustare a parametrilor este s se foloseasc aa
numitele regulatoare autoacordabile, cu ajutorul unui sistem cu structura din
Fig.5.1.8.
r = v
Proiectarea
regulatorului
Parametrii
procesului
Identificarea
parametric
a procesului
condus
Proces
condus
Regulator
SISTEM AJUSTABIL
p
Parametrii regulatorului
u
y
Figura nr.5.1.8.
Sistemul poate fi privit ca avnd dou bucle:
Bucla clasic de reglare automat
Bucl intern de adaptare.
Prin blocul de identificare se obin n timp real valorile parametrilor
modelului matematic al procesului condus.
Aceste valori sunt actualizate n procedura de proiectare pentru
determinarea valorilor optime ale parametrilor regulatorului.
Sunt cunoscute ca sisteme adaptive sau adaptare explicit.
Exist nenumrate variante ale acestei structuri continue sau discrete,
deterministe sau stochstice.
n ultimii ani au devenit foarte utilizate datorit fiabilitii i uurinei de
implementare pe sistemele cu microprocesoare .
5. SISTEME ADAPTIVE 5.1. Structuri de reglare adaptiv
DE REGLARE AUTOMAT
150
5.2. Sisteme adaptive de cu model de referin (SAMR)
5.2.1. Tipuri de configuraii
5.2.1.1. Formularea problemei de adaptare
Sistemele adaptive de reglare cu model de referin (SAMR) se mai
numesc i sisteme adaptive cu model etalon
1
.
Setul de performane impuse este nlocuit sau reprezentat printr-un model
etalon (referin) la care se aplic aceeai intrare ca i la sistemul ajustabil.
Scopul sistemului adaptiv este s modifice parametrii ai sistemului
ajustabil (ai legii de reglare dac sistemul de ajustat este un sistem de reglare n
circuit nchis) sau s aplice semnale de corecie astfel nct eroarea dintre ieirea
modelului i ieirea procesului y
M
(t)
, y
P
(t) y
P
(t, )
e(t) y
M
(t) y
P
(t) y
M
(t) y
P
(t, ) e(t, )
sau eroarea generalizat
(t) x
M
(t) x
P
(t) x
M
(t) x
P
(t, ) (t, )
dintre starea modelului i cea a procesului s fie ct mai mic posibil ntr-o
anumit norm.
e(t, ) min,
sau
(t, ) min,
i n mod sigur
;
t
lim e(t, ) 0
t
lim (t, ) 0
oricare ar fi intrarea aplicat i oricare ar fi condiiile iniiale. r(t)
Exist numeroase abordri i configuraii de SAMR ca de exemplu,
structurile: paralel, serie sau serie-paralel przentatate n continuare.
.
1
n domeniul SAMR literatura teoretic este deosebit de vasat. Trebuie menionate
rezultatele profesorului Ioan Dore Landau, de origine romn, care prin cartea sa: Landau I. D.,
Adaptive Control: The Model Reference Approach, Marcel Dekker, NewYork, 1979, a deschis
noi direcii n domeniu prin utilizarea teoriei hiperstabilitii a lui V. M. Popov.
In continuare sunt prezentate abordarile din cartea, Chalam V.V. , Adaptive Control
Systems, Marcel Dekker, NewYork, 1987.
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
151
5.2.1.2. Sisteme adaptive de cu model de referin (SAMR) n configuraie
paralel
Structura este ilustrat n Fig.5.2.1. unde,
= modelul referin (modelul etalon) MR
= sistemul ajustabil SAj
= mecanismul de ajustare MAj
= mrimea impus (mrimea de referin) r(t) v(t)
= vectorul parametrilor ajustabili.
y (t)
M
r(t)=v(t)
MR
SAj
MAj
e(t)
y (t)
M
y (t)
P
y (t)
P
x (t)
M
x (t)
P
(t)
+
-
Figura nr.5.2.1.
n aceast structur de adaptare att modelul referin ct i sistemul
ajustabil sunt supui la o aceeai intrare . Constituie structura de baz n r(t) v(t)
aplicarea procedurilor de adaptare la sistemele de reglare automat.
5.2.1.3. Sisteme adaptive de cu model de referin (SAMR) n configuraie
serie
Structura este ilustrat n Fig.5.2.2. unde, sistemul ajustabil este comandat
prin ieirea modelului referin. Este indicat n sintetizatoare de semnale.
r(t)=v(t)
MR SAj
MAj
e(t)
y (t)
M
y (t)
P
x (t)
M
x (t)
P
(t)
+
-
y (t)
M
y (t)
P
Figura nr.5.2.2.
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
152
5.2.1.4. Sisteme adaptive de cu model de referin (SAMR) n configuraie
serie-paralel
Exist dou variante ale acestei structuri. Constituie generalizri ale
structurilor anterioare, folosind dou modele referin,ca n Fig.5.2.3. sau
aplicabil simultan la dou sisteme ajustabile ca n Fig.5.2.4.
r(t)=v(t)
MR2
MR1
SAj
MAj
e(t)
y (t)
P
x (t)
P
(t)
x (t)
M
1
x (t)
M
2
y (t)
M
1
y (t)
M
2
+
-
y (t)
M
y (t)
P
Figura nr.5.2.3.
r(t)=v(t)
MR
SAj1
SAj2
MAj
e(t)
( t )
x (t)
M
y (t)
M
2
1
x (t)
P
1
x (t)
P
2
y (t)
P
1
y (t)
P
2
+
-
y (t)
M
y (t)
P
Figura nr.5.2.4.
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
153
5.2.2. Mecanisme de ajustare (MAj)
5.2.2.1. Formularea matematic a problemei de adaptare
Prezentarea se refer n principal la structura de adaptare n conexiunea
paralel din Fig.5.2.1. pentru sisteme continue n timp.
n mod similar se pot face extensii i pentru toate celelalte variante de
conexiuni att pentru sisteme continue ct i pentru sisteme discrete n timp.
Se consider modelul referin caracterizat printr-un sistem dinamic MR
liniar, stabil, complet controlabil, descris prin ecuaiile de stare,
(5.2.1) x
.
M
A
M
x
M
+ B
M
r
(5.2.2) y
M
C x
M
cu starea iniial,
. (5.2.3) x
M
(0) x
M
0
Sistemul ajustabil este considerat ca fiind descris printr-un model
matematic liniar continuu n care se evideniaz vectorul al parametrilor
ajustabili,
(5.2.4) x
.
P
A
P
(, t) x
P
+ B
P
(, t)
. (5.2.5) y
P
C
P
(, t) x
P
Se urmrete s se determinae legea de adaptare denumit i mecanismul
de ajustare, sub forma unei relaii funcionale
(5.2.6) (x
M
, y
M
, x
P
, y
P
, t )
astfel nct att eroarea n raport cu starea,
(5.2.7) (t) x
M
(t) x
P
(t)
s tind asimtotic ctre zero
(5.2.8)
t
lim (t) 0, r(t)
oricare ar fi funcia care reprezint mrimea de referin. r(t)
Se poate formula problema i printr-o descriere intrare-ieire prin eroarea
n raport cu ieirea
(5.2.9) e(t) y
M
(t) y
P
(t)
astfel c se impune condiia de adaptare
. (5.2.10)
t
lim e(t) 0, r(t)
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
154
5.2.2.2. Structura mecanismului de ajustare
Presupunem c se reuete s se exprime relaia funcional (5.2.6) numai
n raport cu eroarea, situaie posibil n conexiunea paralel, de forma
, (5.2.11) (
[0,t]
, t)
dependent de evoluia trecut a sistemului, astfel c blocul de ajustare apare ca
un element cu memorie, unde
(5.2.12)
t
lim (t) 0
. (5.2.13)
[0,t]
{((), ) [0, t]}
n aceste condiii se poate exprima sistemul ajustabil (5.2.4), (5.2.5) sub
forma,
(5.2.14) x
.
P
A
P
(, t) x
P
+ B
P
(, t) r
(5.2.15) y
P
C
P
(, t) x
P
substituind (5.2.11) n (5.2.4) i (5.2.5)
(5.2.16) A
P
(, t) A
P
((
[0,t]
, t), t) A
P
(, t)
(5.2.17) B
P
(, t) B
P
((
[0,t]
, t), t) B
P
(, t)
(5.2.18) C
P
(, t) C
P
((
[0,t]
, t), t) C
P
(, t)
Datorit circuitului de ajustare structura apare ca un sistem n circuit nchis.
Exprimm matricele prin sume fa de o A
P
(, t), B
P
(, t), C
P
(, t)
mulime de valori cunoscute
(5.2.19) A
P
(0, t) A
P
(0) , B
P
(0, t) B
P
(0) , C
P
(0, t) C
P
(0)
ce corespund fie unor valori nominale date fie, dac este posibil de evaluat,
valorile optime care asigur eroarea nul . (t) 0, t 0
Valorile (5.2.16) , (5.2.17) , (5.2.18) se reprezent astfel,
(5.2.20) A
P
(, t) A
P
(0) + A(
[0,t]
, t)
(5.2.21) B
P
(, t) B
P
(0) + B(
[0,t]
, t)
. (5.2.22) C
P
(, t) B
P
(0) + B(
[0,t]
, t)
Sistemul adaptiv poate fi astfel reprezentat printr-un sistem echivalent
neliniar variabil n timp, ntr-o form standard cu reacie care are pe calea direct
un element liniar iar pe calea de reacie un element neliniar.
Acest sistem este exprimat n raport cu variabila , eroarea generalizat, (t)
(5.2.23) (t) x
M
(t) x
P
(t)
scznd din (5.2.1), (5.2.2) ecuaiile (5.2.14), (5.2.15) n care se ine cont de
(5.2.20), (5.2.21), (5.2.22), sub forma
(t) A
M
(t) +[A
M
A
P
(0) A(
[0,t]
, t)] x
P
(t) +[B
M
B
P
(0)] B(
[0,t]
, t) r(t)
(5.2.24)
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
155
Sistemul adaptiv apare deci ca un sistem ca un sitem cu reacie,
(5.2.25)
(t) A
M
(t) + N[(t),
[0,t ]
, x
P
(t), r(t)]
avnd n circuitul direct un element liniar i pe calea de reacie un element
neliniar, ca n Fig.5.2.5.,
N[(t),
[0,t ]
, x
P
(t), r(t)]
[A
M
A
P
(0) A(
[0,t]
, t)] x
P
(t) + [B
M
B
P
(0)] B(
[0,t]
, t) r(t)
(5.2.26)
(0)
(t)
(t)
A
M
+
+
N( )
r(t)
x (t)
P
Subsistem liniar
Subsistem neliniar
Figura nr.5.2.5.
Deoarece mrimile din expresia A
M
, A
P
(0) , x
P
(t) , B
M
, B
P
(0) , r(t) N()
(5.2.26) sunt cunoscute, rmn de determinat numai exprexiile
din caracteristica neliniar ce reprezint subsistemul pe A(
[0,t]
, t); B(
[0,t]
, t)
reacie n Fig.5.2.5. astfel nct sistemul dinamic diferenial n eroarea , dat de (t)
(5.2.24) i reprezentat n Fig.2.5. s fie asimptotic stabil pentru oricare valoare
iniial a erorii i pentru oricare i . (0) [A
M
A
P
(0)] [B
M
B
P
(0)]
n felul acesta proiectarea sistemului adaptiv, a mecanismului de ajustare n
particular, se reduce la determinarea expresiilor funcionalelor
(5.2.27) A(
[0,t]
, t); B(
[0,t]
, t)
care sa asigure stabilitatea asimtotic deci s-a redus problema adaptrii la o
problem de stabilitate asimptotica.
Astfel sunt posibile spre aplicare toate tehnicile de sintez a unor sisteme
cu reacie asimptotic stabile. Din pcate structura este neliniar i variabil n
timp.
Deoarece expresiile (5.2.27) sunt funcionale, ele depind de toat istoria
evoluiei de la momentul iniial pn la momentul curent , mecanismul de t
ajustare este un element dinamic, adic un sistem cu memorie.
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
156
5.2.2.3. Metode de rezolvare a problemelor de sintez optim
Pentru rezolvarea acestei probleme de adaptare, echivalat cu o problem
de sintez a unui sistem asimptotic stabil, exist nenumrate tehnici printre care
se menioneaz:
1. Metoda funciilor de sensitivitate
2. Metoda funciilor Liapunov
3. Abordarea folosind conceptul de hiperstabilitate
Toate aceste tehnici presupun ataarea unui criteriu de calitate care s
msoare ct de bun este aproximarea efectuat de catre sistemul ajustat a
modelului.
Astfel se reduce problema de sintez a sistemului adaptiv la o problem de
sintez optimal, care sa conduc la minimizarea criteriului de calitate ales cu
asigurarea i a stabilitii asimptotice.
Criteriile de calitarte se definesc fie n raport cu eroarea generalizat
(5.2.23), reluat n (5.2.28)
(5.2.28) (t) x
M
(t) x
P
(t)
fie n raport cu eroarea dintre mrimile de ieire (5.2.9), reluat n (5.2.29)
. (5.2.29) e(t) y
M
(t) y
P
(t)
Criteriile de calitate pot fi:
Criterii locale de calitate, dependente numai de valorile
momentane sau , (t) e(t)
Criterii globale de calitate, exprimate prin integrale i care depind
de segmentele sau ale acestor erori.
[0,t]
e
[0,t]
Metoda funciilor de sensitivitate este de fapt o metod de gradient cu un
criteriu de calitate . J()
Ca n orice metod de gradient se urmrete reducerea valorii criteriului
prin modificarea parametrului de-a lungul direciei cu cea mai cobortoare J()
pant, panta negativ cu valoare absolut maxim, dat de gradientul funciei J()
n raport cu . Aceasta nseamn asigurarea unei viteze de variaie n timp pentru
proporional cu gradientul .
J()
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
157
Deoarece este independent de i numai funcia y
M
(t) y
P
(t) y
P
(t, )
depinde de acesta, gradientul funciei este dat numai de gradientul funciei J()
, notat y
P
(t, )
(5.2.30) S
P
(t, )
y
P
(t, )
i denumit funcia de senzitivitate a erorii la ieire n raport cu parametrul .
Pentru minimizarea criteriului prin se pot utiliza toate J() S
P
(t, )
tehnicile cunoscute la metodele de gradient:
Metoda simpl,
Metoda celei mai rapide pante,
Metoda gradienilor conjugai, etc.
Din pcate, n problemele de adaptare, funcia de senzitivitate S
P
(t, )
depinde parametrii necunoscui ai sistemului ajustabil i deci aceste metode
clasice nu pot fi aplicate n mod direct.
Pentru a se evit aceast dificultate n aplicarea metodei funciiei de
senzitivitate se folosete aa numita Regula MIT prin care se nlocuiesc
parametrii necunoscui ai sistemului ajustabil prin valorile lor estimate.
Aplicarea regulei MIT nu garanteaz ns obinerea ntotdeauna a unui
sistem n circuit nchis stabil sau convergena erorii ctre zero.
n cazuri simple aceast metod d rezultate bune n special la variaii mici
ale mrimii de referin.
Metodele de sintez a sistemelor stabile prin circuite de reacie, denumite
i metode de stabilizare, bazate pe funciile Liapunov sau pe teoria hiperstabilitii
a lui Popov.
Acestea conduc la rezultate satisfactoare din punct de vedere al asigurrii
stabilitii ns cer ca ntregul vector de stare s fie accesibil pentru msurare.
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
158
5.2.2.4. Metoda funciilor de senzitivitate pentru realizarea adaptrii
Metoda funciilor de senzitivitate n abordarea cu regula MIT, minimizeaz un
criteriu de calitate n care se nlocuiesc parametrii necunoscui cu cei estimai
(5.2.31) J J()
dat prin integrala patratului normei euclidiene a erorii dintre ieirea dorit
i cea a procesului , de exemplu ca o medie alunectoare numit i y
M
(t) y
P
(t, )
criteriu glisant de calitate, de forma
, (5.2.32) J()
1
2
t
tT
y
M
() y
p
(, )
2
d
1
2
t
tT
e(, )
2
d
sau ca un criteriu global pe un interval mrginit din patratul normei erorii
(5.2.33) J()
1
2
T
0
y
M
() y
p
(, )
2
d
1
2
T
0
e(, )
2
d
sau de forma unui criteriu punctual
. (5.2.34) J()
1
2
y
M
(t) y
P
(t, )
2
1
2
e(t, )
2
Pentru aplicarea metodei de gradient se urmrete asigurarea vitezei de
variaie n timp a vectorului parametrilor ajustabili , proporional, printr-o
.
matrice constant pozitiv definit, cu gradiantul criteriului de calitate. Q
Cnform regulei MIT, se consider valorile estimate ale vectorului ,
(5.2.35)
.
(t) Q
J()
Pentru criteriul (5.2.34) de mai sus se obine
(5.2.36)
.
(t) Q
y
P
(t, )
e(t)
unde se noteaz, subnelegnd dependena,
. (5.2.37) e(t, ) e(t)
Relaia (5.2.36) reprezint regula MIT, care se mai poate scrie i sub forma,
(5.2.38)
.
(t) Q
e(t, )
e(t)
deoarece (5.2.39)
e(t, )
[y
M
(t) y
P
(t, )]
y
P
(t, )
Se pot folosi diferite tehnici de optimizare bazate pe gradient, de exemplu:
Metoda grdientul simplu; Metoda gradienilor conjugai; Metoda pailor cei mai
descresctori. Funcia de senzitivitate se pot obine i prin derivarea n S
P
(t, )
raport cu a transformatelor Laplace ale mrimii ,de ieire din sistemul y
P
(t)
ajustabil (5.2.40) Y
P
(s, ) L{y
P
(t)}
(5.2.41) S
P
(t, )
y
P
(t, )
L
1
{
Y
P
(s, )
}
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
159
5.2.2.5. Exemplu de structur adaptiv cu model etalon de ordinul nti
Se consider un model referin descris printr-un sistem liniar invariabil n
timp cu funcia de transfer,
(5.2.42) H
M
(s)
K
T s + 1
Y
M
(s)
V(s)
iar procesul condus este un sistem cu funcia de transfer
(5.2.43) H
P
(s)
K
P
T s + 1
Y
P
(s)
V(s)
al crui factor de proporionalitate se modific dup legi necunoscute. K
P
Se urmrete implementarea unui sistem adaptiv care sa asigure o eroare
(5.2.44) e(t) y
M
(t) y
P
(t)
ct mai mic.
Acest deziderat se asigur prin introducerea la intrarea procesului condus a
unui element proporional cu factorul care poate fi ajustat din exterior.
n acest fel, sistemul ajustabil este,
(5.2.45) SAj : H
P
(s)
K
P
T s + 1
Y
P
(s, )
V(s)
adic, considernd mrimea de intrare comun la modelul referin i la v(t)
sistemul ajustabil avem acum,
(5.2.46) y
P
(t) y
P
(t, )
ieirea din procesul condus dependent de factorul ajustabil , i
. (5.2.47) e(t) y
M
(t) y
P
(t, ) e(t, )
Evident toate aceste mrimi depind i de factorul de y
P
(t) , e(t)
proporionalitate necunoscut dar acest lucru nu se evideniaz n mod explicit. K
P
Trebuie ajustat astfel nct , oricare ar fi mrimea de intrare . e(t) 0 v(t)
Se poate exprima, n regim forat, condiia prin identitatea e(t) 0
(5.2.48) H
M
(s)
K
T s + 1
H
P
(s)
K
T s +1
ceea ce ar corespunde relaiei de adaptare parametric de tip gain scheduling
(5.2.49) K K
p
K
K
P
care ns nu poate fi implementat deoarece nu se cunoate valoarea factorului
Dac s-ar putea msura soluia (5.2.49) ar fi simpl i eficient. K
P
K
P
Aceast problem de adaptare se poate rezolva folosind metoda funciilor
de senzitivitate cu regula MIT. Pentru a calcula funcia de senzitivitate se
calculeaz transformata Laplace a erorii (5.2.47)
(5.2.50) L{e(t)} E(s, ) [
K
Ts + 1
K
P
Ts + 1
] V(s)
K K
P
Ts + 1
V(s)
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
160
Derivata n raport cu a expresiilor complexe este,
, (5.2.51)
E(s, )
K
P
Ts + 1
V(s)
K
P
K
K
Ts +1
V(s)
K
p
K
Y
M
(s)
care n domeniul timp are expresia,
(5.2.52)
e(t, )
L
1
{
E(s, )
}
K
p
K
L
1
{ Y
M
(s)}
K
p
K
y
M
(t
Regula MIT (5.2.38) conduce la,
(5.2.53)
.
(t) Q [
K
p
K
y
M
(t)] e(t)
adic (5.2.54)
.
(t) Q [y
M
(t) e(t)]
unde s-a notat,
(5.2.55) Q Q
K
p
K
Aceast structur adaptiv este ilustrat n Fig.2.6 n care pe calea de
reacie s-a utilizat un factor n loc de . Dac s-ar cunoate expresia din Q Q Q
( 2.55), deci dac s-ar cunoate atonci punnd se obine n mod sigur K
P
Q Q
un sistem asimtotic stabil pentru care . In realitate se implementeaz e(t) 0
care ar putea conduce la o structur instabil. Q Q
Dac totui parametrul necunoscut se modific n limite pentru care K
P
Q
este n domeniul de stabilitate, se obine condiia adic sistemul ajustat e(t) 0
urmrete, cel puin asimptotic cnd , modelul referin. t
Valoarea coeficientului implementat, determin viteza de convergen a Q
erorii ctre zero. O valoare prea mare pentru poate conducela pierderea Q
stabilitii. Metodele bazate pe funciile de sensitivitate nu asigur stabilitatea
global a circuitului n care intervine circuitul de adaptare, n special cnd au loc
variaii mari ale parametrilor necunoscui ai sistemului ajustabil
v(t)
Kp
+
-
y (t)
P
y (t)
P
SAj
y (t)
M
y (t)
M
y (t)
M
(t)
.
(t)
Ts+1
K
Ts+1
1
e(t)
y (t)
M
.
e(t)
Q
^
Figura nr.5.2.6. 7
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
161
5.2.2.6. M etoda funciilor Liapunov pentru realizarea adaptrii
Utilizarea funciilor Liapunov pentru adaptare asigur i stabilitatea global
a sistemului adaptiv. Problema este dificil deoarece sistemele adaptive se
comport ca sisteme neliniare variabile n timp. Mecanismul de adaptare depinde
de alegerea funciei Liapunov.
Prin aceast procedur nti se obine ecuaia diferenial care descrie
eroarea dintre ieirea modelului referin i cea a sistemului ajustabil.
Problema este s se "aranjeze" pri ale acestei ecuaii care o fac s fie
asimptotic stabil. Din "aranjamentele"de mai sus se extrag dependenele care
definesc mecanismul de ajustare.
n mod concret, n acest scop se ataeaz ecuaiei diferenial a erorii o
funcie Liapunov pozitiv definit. Se alege mecanismul de ajustare,
"aranjamentele" de mai sus, care asigur ca derivata n raport cu timpul a funciei
Liapunov s fie negativ definit.
Pe baza teoremelor de stabilitate ale lui Liapunov se asigur stabilitatea
asimptotic, cu preul ajustrilor facute care n final reprezint scopul procedurii
de sintez.
Scopul mecanismului de ajustare este de a menine derivata funciei
Liapunov negativ, rezultnd de ce trebuie modificat n structura sistemului.
Aceast tip de stabilitate asigur ca eroarea de urmrire a modelului s tind
ctre zero sau s rmn mrginit chiar dac se modific mrimea de intrare v(t)
sau parametrii necunoscui ai sistemului ajustabil se modific. Forma soluiilor
depinde de forma funciilor Liapunov alese.
Pentru rezolvarea unei astfel de probleme se procedeaz astfel:
1. Se descrie sistemul adaptiv printr-o ecuaie n funcie de eroarea de urmrire:
(5.2.56) e(t) x
M
(t) x
p
(t)
(5.2.57)
(t) A
M
(t) + (A
M
A
p
(, t)) x
p
(t) + (B
M
B
p
(, t) r(t)
(5.2.58)
(t) A
M
(t) + f(t)
unde s-a notat
(5.2.59) f(t) (A
M
A
p
(, t)) x
p
(t) + (B
M
B
p
(, t) r(t)
2. Se asociaz acestei euaii o funcie Liapunov pozitiv definit.
3. Se determin modul de modificare al parametrului , deci n final al lui f(t)
astfel nct derivata parial n raport cu timpul a funciei Liapunov s fie strict
negativ. Aceast condiie asigur stabilitatea global asimptotic a sistemului:
(5.2.60)
t
lim (t) 0, r(t), (0)
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
162
Un exemplu de funcie Liapunov este,
(5.2.61) V(t)
T
(t) P (t) + h( , )
unde pentru structura de mai jos se pot alege:
Matricele sunt alctuite din vectorii coloan respectiv, i ,
i
,
j
exprim nepotrivirea dintre parametrii modelului referin i cei ai sistemului
ajustabil,
(5.2.62) (t) A
M
A(, t) [
1
,
2
, ...,
n
]
(5.2.63) (t) B
M
B(, t) [
1
,
2
, ...,
m
]
Se alege funcia scalar , h
. (5.2.64) h(, )
n
i1
i
T
i
+
m
i1
i
T
Interpretm, simplu funcia ca o funcie de timp. h
(5.2.65) h(, ) h(t)
Derivata funciei Liapunov n raport cu variabila timp este, n care este o f
funcie scalar conduce la,
(5.2.66) V
.
(t)
.
T
P +
T
P
.
+h
.
(t)
(5.2.67) V
.
(t) [
T
A
M
T
+ f
T
] P +
T
P [A
M
+ f]+ h
.
(t)
(5.2.68) V
.
(t)
T
Q + 2
T
P f + h
.
unde
(5.2.69) Q A
M
T
P +P A
M
Se tie c are loc echivalena,
stabil. (5.2.70) Q
T
Q > 0, P
T
P > 0 A
M
Deci, se alege o matrice oarecare i dac este stabil, ecuaia Q A
M
Liapunov de mai sus are soluie pozitiv definit unic (care determin folosirea P
tehnicilor de rezolvare a acestei ecuaii).
Pentru a obine tiut negativ, trebuie ca, V
.
(t)
(5.2.71) 2
T
P f + h
.
(t) 0
denumit condiia de adaptare.
Trebuiesc manevrate astfel matricile i , deci parametrii, astfel nct Q
identitatea (5.2.71) s fie adevrat oricare ar fi t.
Aceasta impune ca
(5.2.72) V
.
(t)
T
Q < 0
care asigur stabilitatea asimptotic.
n particula, se observ
(5.2.73) h
.
(t) 2
n
i1
.
i
T
i
+ 2
m
i1
.
T
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
163
Dar
(5.2.74) f x
p
+ r
n
i1
x
p
i
(t)
i
+
m
i1
r
i
(t)
i
unde, este componenta i a vectorului . x
M
i
x
M
Ecuaia de adaptare (5.2.71) conduce la condiia:
(5.2.75) 0
n
i1
(
T
P x
p
i
(t) +
.
i
T
)
i
+
m
i1
(
T
P r
i
(t) +
.
T
)
O condiie ca aceast relaie s fie ndeplinit este ca cele dou sume s fie zero
P
T
P
(5.2.76)
.
i
P x
M
i
(t)
(5.2.78)
.
i
P r
i
(t)
Dac matricile:
(5.2.79) A
p
(, t) [ a
1
(t) , ... , a
n
(t) ]
B
p
(, t) [ b
1
(t) , ... , b
n
(t) ]
(5.2.80)
.
i
a
.
i
(t)
astfel c legile de adaptare devin,
(5.2.81) a
.
i
(t) P (t) x
M
i
(t)
(5.2.82) b
.
i
(t) P (t) r
i
(t)
Implementarea ajustrii este prezentat n Fig.5.2.7.
r(t)=v(t)
MR
SAj
x (t)
M
x (t)
P
(t)
+
-
P
a (t)
.
i
a (t)
i
r (t)
i
b (t)
.
i
b (t)
i
x (t)
i
M
i=1, ..,n
i=1, .. m
( t )
P
.
Figura nr.5.2.7.
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
164
5.2.2.7. Metoda hiperstabilitii pentru realizarea adaptrii
Deoarece ecuaia n eroarea generalizat a sistemului adaptiv apare ca un
sistem cu reacie, ca n Fig.5.2.5. se echivaleaz acea structur ca n Fig.2.8. ,
pentru a avea forma standard de aplicare a teoriei hiperstabilitii.
n circuitul direct apare un sistem liniar, determinat de matricea model,
care este echivalat prin ecuaii, notate standard,
(5.2.83) x
.
A x+ B u
(5.2.84) y C x+ D u
iar pe calea de reacie o structur neliniar, notat standard,
(5.2.85)
w F(y(), t) , t
cu relaia de conexiune,
. (5.2.86) u w
Se aranjeaz mecanismul de ajustare astfel nct s fie ndeplinit condiia
teoremei de hiperstabilitate a lui Popov
(0)
(t)
(t)
(t)
A
M
+
+
N( )
L( )
r(t)
x (t)
P
Subsistem liniar
Subsistem liniar
Subsistem neliniar
Subsistem neliniar
w
w
w
x=Ax+Bu
y=Cx+Du
u=-w
t
w=F(y( ), t)
y
Figura nr.5.2.8.
(5.2.87)
0
t
w
T
() y() d()
0
2
, t 0
unde este o constant pozitiv.
0
2
Sistemul descris de ecuaiile (5.2.83) (5.2.86) este hiperstabil dac pentru
oricare ce satisface (5.2.87) are loc inegalitatea w
x(t) k ( x(0) +)
pentru anumite constante pozitive . Prin simbolul s-a notat norma k,
euclidian.
5. SISTEME ADAPTIVE 5.2. Sisteme adaptive
DE REGLARE AUTOMAT cu model referin (SAMR)
165
5.3. Sisteme adaptive de reglare cu regulatoare autoacordabile
5.3.1. Structuri de autoacordare
Este cea mai folosit structur n aplicaiile practice datorit simplitii de
implementare i robusteii.
Structura general este urmtoarea:
u ( t )
v(t)
-
Proiectarea
legii de
reglare
Identificarea
parametrilor
y(t) Proces
condus Regulator
Parametrii
reglare
legii de
Figura nr.5.3.1.
Proiectarea legii de raglare presupune proiectarea valorilor parametrilor
legii procesului condus (considerat de o anumit form), parametrii modelului se
consider cunoscui apriori.
Parametrii procesului condus sunt estimai dup diferite criterii, n timp
real, prin identificarea procesului. Valorile estimate ale parametrilor procesului
sunt substituite n algoritmul de proiectare a legii de reglare (care iniial a
presupus c se cunosc valorile parametrilor).
Apare o separare ntre procedura de proiectare i cea de identificare:
"Principiul echivalenei sigure".
Prima structur de acest fel a fost propus de Kalman, reluat de Astrom
care a pornit de la "Controlul cu varian minim".
Majoritatea regulatoarelor industriale au i funcionarea de autoacordare
(self-tuning).
Pentru identificare, s-a impus identificarea recursiv dup diferite criterii
considernd modelul matematic discret.
Aceast identificare ridicprobleme mai ales cnd procesul condus are
timp mort (mai grav cnd este i variabil). Ridic probleme i cnd parametrii
modelului au variaii mari n salt sau cnd se modific cu viteze de variaie
comparabile cu vitezele de variaie ale regimului tranzitoriu.
5. SISTEME ADAPTIVE 5.3. Sisteme adaptive de reglare
DE REGLARE AUTOMAT cu regulatoare autoacordabile
166
5.3.2. Algoritme de de autoacordare
Se consider c procesul condus este descris prin modelul matematic liniar
discret,
(5.3.1) A(q
1
)y
k
B(q
1
)u
k
+ C(q
1
)
k
unde este o secven pur ntmpltoare scalar cu medie nul
k
(5.3.2) E{
k
} 0 iar E(
k
j
) (k j)
2
iar
(5.3.3) A(q
1
) 1 + a
1
q
1
+ ... +a
n
q
n
(5.3.4) B(q
1
) b
1
q
1
+ ... + b
n
q
n
(5.3.5) C(q
1
) 1
Sistemul (5.3.1) este descris i prin ecuaia recursiv
(5.3.6) y
k
a
1
y
k1
... a
n
y
kn
+ b
1
y
k1
+... + b
n
y
kn
+
k
care se scrie aranjeaz sub forma,
(5.3.7) y
k
k1
T
k1
+
k
unde s-au notat,
(5.3.8)
k1
(a
1
, a
2
, ..., a
n
, b
1
, ..., b
n
)
T
(5.3.9)
k1
(y
k1
, ..., y
kn
, u
k1
, ..., u
kn
)
T
atunci ecuaia sistemului devine:
Dac se consider constant, eventual afectat de o eroare
cu
k
e
k
(5.3.10) E{e
k
} 0
(5.3.11) E{e
k
e
j
T
} (k j) Q
ncare s-a notat prin matricea de covarian. Q
Se pot folosi n mod direct diferite tehnicii de estimare utilizate la
estimarea strii sistemelor liniare cu intrri mrimi stochastice.
Un criteriu des folosit este:"criteriul celor mai mici ptrate"
(5.3.12) J
k
i0
(y
k
k1
T
k1
)
2
unde notm
(5.3.13)
k
y
k
k1
T
k1
eroarea de predicie cu un pas a mrimii de ieire.
Se pune problema determinrii valorii optime a parametrului astfel
k
k
nct s se asigure valoarea minim a criteriului . J
5. SISTEME ADAPTIVE 5.3. Sisteme adaptive de reglare
DE REGLARE AUTOMAT cu regulatoare autoacordabile
167
Soluia unei astfel de probleme, dup criteriul celor mai mici ptrate, se
poate exprima prin relaii recursive (un caz particular al filtrului Kalman discret)
sub forma,
(5.3.14)
k1
+ K
k
(y
k
k1
T
k1
)
unde
(5.3.15)
k
y
k
k1
T
k1
se numete procesul de nnoire. matricea de amplificare este dat de o ecuaie K
k
recursiva de forma
(5.3.16) K
k
P
k1
k1
(
2
+
k1
T
P
k1
k1
)
1
iar matricea varian se calculeaz cu relaia recursiv Ricatti, P
k
(5.3.17) P
k
P
k1
P
k1
k1
(
2
+
k1
T
P
k1
k1
)
1
k1
P
k1
n practic se utilizeaz i alte tehnici pentru autoacordare, de exemplu o
identificare a sistemului n circuit nchis.
Se urmrete autoadaptarea, avnd n vedere o anumit structur a formei
rspunsului sistemului n circuit nchis la semnale tip.
Alte metode permit determinarea a diferite puncte ale caracteristicii
complexe de frecven a procesului condus.
5. SISTEME ADAPTIVE 5.3. Sisteme adaptive de reglare
DE REGLARE AUTOMAT cu regulatoare autoacordabile
168
5.4. Exemple de sisteme adaptive de reglare automat
Implementarea n practic a unor soluii sofisticate de reglare adaptiv
necesit o atenie deosebit privind aplicarea lor n mod adecvat i a modului de
trecere de la reprezentrile teoretice la algoritmi care s funcioneze corect ntr-un
cadru bine definit.
Circuitele de adaptare nseamn de fapt ci de reacie suplimentare care pot
conduce la comportri nesatisfactoare cnd nu sunt ndeplinite ipotezele
simplificatoare ale dezvoltrilor teoretice, ca de exemplu sistem liniar, un anumit
tip de zgomote, etc.
Exist numeroase idei simple care conduc la soluii ad-hc dar care sunt
robuste i aplicabile n practic.
Se prezint cteva astfel de exemple cu ncadrare mixt n categoriile de
sisteme adaptive prezentate anterior.
1
5.4.1. Sistem adaptiv de reglare cu adaptare extern
5.4.1.1. Formularea problemei de adaptare extern
Adaptarea extern este necesar datorit modificrii caracterului unor
semnale exterioare.
Se consider un sistem de urmrire ca n Fig.5.4.1. n care mrimea de
referin fizic este un unghi , dar peste aceast mrime se suprapune un
i
(t)
zgomot astfel c mrimea prescris , utilizat ca i semnal n sistemul de w(t) v(t)
reglare este
. (5.4.1) v(t)
i
(t) + w(t)
Derivare
statistic
y(t)
w(t)
(t)
i
(t)
s(s+2 )
w(t)= t i
i
( ,,
N)
i
^opt
n
Figura nr.5.4.1.
1
Exemplele prezentate au la baz expunerile din cartea S. Clin, Regulatoare automate,
Ed. Did. Ped. 1976.
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
169
Presupunem c este un zgomot alb cu densitatea spectral i c w(t) S
w
(s)
mrimea de referin fizic are o variaie n timp de tip ramp deci cu o
i
(t)
pant constant,
i
. (5.4.2)
i
(t)
i
t
Se consider c sistemul de reglare este liniar i c funcia de transfer n
circuit deschis este
, (5.4.3) H
d
(s)
n
2
s (s + 2
n
)
Y(s)
E(s)
creia i corespund funciile de transfer n circuit nhis , H
v
(s)
(5.4.4) H
v
(s)
n
2
s
2
+2
n
s +1
Y(s)
V(s)
i a elementului de comparaie , H
EC
(s)
. (5.4.5) H
EC
(s)
s (s + 2
n
)
s
2
+2
n
s +1
E(s)
V(s)
Pentru aceast structur de sistem, erorile staionare de poziie i vitez
0
sunt respectiv,
1
(5.4.4)
0
0
. (5.4.5)
1
2
n
i
Aa cum rezult din (5.4.5), pentru a avea eroare de vitez mic trebuie ca
s fie foarte mare.
n
Aceast condiie este n contradicie cu cerina ca sistemul n circuit nchis
s aib caracter de filtru trece jos.
O valoare mare pentru nseamn o band de frecvena larg i efecte
n
puternice ale zgomotului de intrare care acioneaz n spectru nalt de frecvene.
Prin structura adaptiv se urmrete meninerea unui compromis ntre
cerina de rapiditate i cerina de rejecie a efectului zgomotului de intrare.
Deoarece zgomotul de intrare are caracter aleator, pentru deducerea w(t)
algoritmului de adaptare sunt necesare cteva noiuni clasice privind procesele
stochastice care sunt reamintite n paragraful urmtor.
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
170
5.4.1.2. Caracteristici statistice ale unor semnale ntmpltoare
Se reamintete c pentru un semnal , interpretat ca fiind realizarea unui x(t)
proces stochastic staionar i ergodic , se definesc o serie de caracteristici X
t
statistice, ca de exemplu:
Valoarea medie ,
x
, (5.4.6)
x
x
T
lim
1
2T
+T
T
u(t)dt
1
2T
+T
T
u(t)dt
Funcia de autocorelaie R
x
()
(5.4.7) R
x
()
T
lim
1
2T
+T
[x(t)
x
] [x(t + )
x
] dt
aproximat prin
(5.4.8) R
x
()
1
2T
+T
[x(t)
x
] [x(t +)
x
] dt
Densitatea spectral , S
x
(s)
Densitatea spectral este definit ca fiind transformata Laplace bilateral a
funciei de corelaie R
x
()
. (5.4.9) S
x
(s) L
2
{R
x
()}
R
x
() e
s
d
Cunoscnd densitatea spectral se poate deduce funcia de corelaie,
(5.4.10) R
x
() L
2
1
{S
x
(s)}
1
2j
c+j
cj
S
x
(s) e
s
d
Dispersia i Valoarea medie patratic D
x
x
Sunt date de relaia
(5.4.11) D
x
x
2
T
lim
1
2T
T
T
[x(t)
x
]
2
dt
Acestea se pot obine din funcia de corelaie sau din densitatea spectral
(5.4.12) D
x
x
2
R
x
(0)
1
2j
c+j
cj
S
x
(s) ds
Formule de calcul a valorii medii mpatratice
Dac expresia densitii spectral complex de autocorelaie se poate S
x
(s)
descompune ca produs de doi factori de forma,
(5.4.13) S
x
(s) F(s) F(s)
unde este o funcie raional de forma, F(s)
(5.4.14) F(s)
c
0
+ c
1
s + + c
n1
s
n1
d
0
+d
1
s +d
n
s
n
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
171
se poate calcula integrala
, (5.4.15) I
n
1
2j
+j
j
F(s) F(s) ds
prin relaii de forma, pentru de exemplu, n 3
(5.4.16) I
3
c
2
2
d
0
d
1
+(c
1
2
2c
0
c
2
) d
0
d
3
+ c
0
2
d
2
d
3
2 d
0
d
3
(d
0
d
3
+ d
1
d
2
)
Dac ns se se poate exprima sub forma S
x
(s)
(5.4.17) S
x
(s)
B(s)
A(s) A(s)
n care i sunt polinoame de forma A(s) B(s)
B(s)
n1
k0
b
k
s
2(nk1)
b
0
s
2(n1)
+ b
1
s
2(n2)
+... + b
n2
s
21
+ b
n1
s
20
(5.4.18)
(5.4.19) A(s)
n
k0
a
k
s
nk
a
0
s
n
+ a
1
s
n1
+... + a
n1
s + a
n
s
0
atunci integrala
, (5.4.20) I
n
1
2j
+j
j
B(s)
A(s) A(s)
ds
1
2j
+j
j
S
x
(s) ds R
x
(0)
x
2
se calculeaz cu relaia general
(5.4.21) I
n
(1)
n+1
2 a
0
M
n
n
unde
(5.4.22)
n
a
1
a
3
a
5
. . .
a
0
a
2
a
4
. . .
0 a
1
a
3
. . .
. . . . a
n1
.
0 0 0 . . a
n
este un determinant iar se calculez nlocuind n prima linie cu (n n) M
n
n
coeficienii b
0
, b
1
, ... , b
n1
(5.4.23) M
n
b
0
b
1
b
2
. . . b
n2
b
n1
a
0
a
2
a
4
. . . . .
0 a
1
a
3
. . . . .
. . . . . . . .
0 0 0 . . . . a
n
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
172
Rspunsul unui sistem liniar la intrri procese stochastice
Dac un semnal , caracterizat ca realizare a unui proces stochastic cu u(t)
densitatea spectral , este aplicat la intrarea unui sistem liniar cu funcia de S
u
(s)
transfer , atunci ieirea este un semnal ce poate fi interpretat ca fiind H(s) y(t)
realizarea unui proces stochastic cu densitatea spectral . Y
t
S
y
(s)
ntre densitile spectrale ale semnalelor de intrare i ieire exist relaia
(5.4.24) S
y
(s) H(s) H(s) S
u
(s)
care permita calculul valorii medii patratice a rspunsului unui sistem dac se
cunoate valoarea medie patratic a intrrii i funcia de transfer.
5.4.1.3. Algoritmul de adaptare extern
Pentru structura din Fig.5.4.1., se evideniaz n rspunsul sistemului
componenta determinat de semnalul util i componenta y
i
(t)
i
(t) y
w
(t)
determinat de perturbaia interpretat ca fiind realizarea procesului w(t)
stochastic zgomot alb. W
t
Considerm c ambele semnale i admit transformate Laplace
i
(t) w(t)
respectiv .
i
(s) W(s)
Au loc relaiile,
(5.4.25) y(t) y
i
(t) +y
w
(t) Y(s) Y
i
(s) + Y
w
(s)
unde
(5.4.26) Y
i
(s) H
v
(s)
i
(s)
(5.4.27) Y
w
(s) H
v
(s) W(s)
i semnalul eroare prelucrat de legea de reglare are dou componente (t)
n raport cu semnalul util i perturbaia,
, (5.4.28) (t)
i
(t) +
w
(t) E(s) E
i
(s) + E
w
(s)
unde,
(5.4.29) E
i
(s) H
EC
(s)
i
(s)
. (5.4.30) E
w
(s) H
EC
(s) W(s)
Datorit caracterului aleator al perturbaiei nu se poate preciza expresia w(t)
componentei a semnalului de eroare pentru c nu se poate calcula n mod
w
(t)
determinist expresia semnalului . w(t)
Evident c se poate msura semnalul contaminat prin relaia (5.4.1) i v(t)
semnalul de eroare
(5.4.31) (t) v(t) y(t)
ns descrierea determinist a componentei este nerelevant.
w
(t)
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
173
Singura modalitate consistent o constituie descrierea (caracterizarea)
acestei componente prin mrimi statistice.
Dac semnalul interpretat ca fiind realizarea unui proces stochastic w(t)
staionar i ergodic cu funcia de autocorelaie
(5.4.32) R
w
() N ()
atunci, densitatea sa spectral definit ca fiind transformata Laplace S
w
(s)
bilateral a funciei de corelaie
(5.4.33) S
w
(s) L
2
{R
w
()}
R
w
() e
s
d N
Componenta a semnalului de eroare, interpretat ca realizare a unui
w
(t)
proces stochastic generat de intrarea are o densitate spectral W
t
(5.4.34) S
w
(s) H
EC
(s) H
EC
(s) S
w
(s)
(5.4.35) S
w
(s)
s (s + 2
n
)
s
2
+ 2
n
s + 1
s (s 2
n
)
s
2
2
n
s + 1
N
B(s)
A(s) A(s)
din care, folosind relaiile de calcul de mai sus se deduc determinanii , M
n
M
2
i se evalueaz expresia valorii medii patratice, N
n
N
2
(5.4.36)
w
2
1
2a
0
M
n
D
n
n
4
N
Se observ c pentru reducerea efectului perturbator trebuie ca s fie
n
mic n contradicie cu cerina de eroare staionar de vitez.urmrire.
Se definete un criteriu de calitate care s mbine cele dou cerine,
(5.4.37) I (
1
)
2
+
w
2
4
2
n
2
i
2
+
n
4
N f(
n
, , , N,
i
)
Din condiia necesar de minim se deduce valoarea optim a pulsaiei
n
opt
ce trebuie ajustat n siustem,
n
(5.4.38)
I
n
0 n
opt
(, , N,
i
)
unde
(5.4.39)
I
n
1
4
N
8
2
n
3
i
2
(5.4.40) n
opt
2 [
i
N
]
1
3
Panta rampei este evaluat printr-un algoritm de derivare statistic,
i
nsemnnd de fapt un algoritm de estimare a derivatei unui semnal contaminat cu
zgomot. Se obine o valoare care este utilizat n relaia de ajustare
i
(5.4.41) n
opt
2 [
i
N
]
1
3
aa cum se poate urmri i n Fig.5.4.1.
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
174
5.4.2. Sistem adaptiv cu controlul caracteristicii de frecven
Este cunoscut faptul c manipularea caracteriticilor de frecven conduce la
soluii mai robuste dect manipularea, ntr-o form sau alta, a coeficienilor unei
funcii de transfer.
n acest exemplu se exploateaz efectul modificrii factorului de
amplificare al prii fixe a sistemului asupra caracteristicii de frecven e erorii
provocat de variaia trapt a mrimii impuse.
Metoda poate fi extins i pentru cazul n care regimurile tranzitorii sunt
provocate de variaia unei perturbaii.
Se consider un sistem de reglareca n Fig.5.4.2., la care funcia de transfer
n circuit deschis este de forma,
(5.4.42) H
d
(s)
K
R
K
F
n
2
s (s + 2
n
)
n care se evideniaz factorul de amplificare al prii fixe, factor ce se poate K
F
modifica n timp dup legi necunoscurte apriori.
De asemenea se evideniaz explicit factorul de proporionalitate al legii de
reglare, , ce trebuie ajustat astfel nct s se menin o comportare dorit K
R
exprimat prin condiia
. (5.4.43) K
R
K
F
1
n exemplul de sistem adaptiv de tip gain scheduling prezentat anterior, se
considera factorul ca fiind msurabil. K
F
Structura de adaptare din acest exemplu face parte din categoria sistemelor
cu regulator autoacordabil, partea de identificare a procesului fiind realizat prin
valorificarea efectului factorului asupra caracteristicilor de fracvern. K
F
+
v(t)
(t)
FTJ
FTS
+
-
K/s
K
R
y(t)
F
K
2
n R
K
n s(s+2 )
-
Figura nr.5.4.2.
Se observ c pentru o variaie treapt, considerat unitate, a mrimii impuse,
(5.4.44) v(t) 1(t) V(s)
1
s
eroarea are transformata Laplace
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
175
(5.4.45) E(s)
s (s +2
n
)
s
2
+2
n
s + K
R
K
F
n
2
1
s
s + 2
n
s
2
+ 2
n
s +K
R
K
F
n
2
adic o expresie cu un zerou real i doi poli complex conjugai.
Caracteristica asimptotic de frecven
(5.4.46) L
E
() 20log{ E(j) }
are un punct de frngere cu la pulsaia +20dB/dec
, (5.4.47) 2
n
independent de factorul , i un punct de frngere cu la pulsaia K
F
40dB/dec
(5.4.48)
n
K
R
K
F
aa cum se poate urmri i n Fig.5.4.3.
20lg
2
K
2 n
+20dB/dec
-20dB/dec
R
K
R K
F
n
20lg{ } | E(j )|
K
R
K
F
1+
4
2
20lg{ }
Figura nr.5.4.3.
Vrful caracteristicii asimptotice la pulsaia de frngere
n
K
R
K
F
nu depinde de i are valoarea K
F
(5.4.49) L
E
(
n
K
R
K
F
) 20log{ 1 +
K
R
K
F
4
2
}
Pentru diferite valori ale produsului
(5.4.50) K K
R
K
F
se obin caracteristicile din Fig.5.4.4.
2 n
-20dB/dec
20lg{ } | E(j )|
K
R K
F =1
K
R K
F <1
K
R K
F >1
Figura nr.5.4.4.
Se observ c la creterea factorului are loc o deplasare a caracteristicilor K
de frecven ctre frecvene mari, i invers la scderea acestui factor.
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
176
Aceste deplasri ale caracteristicilor de frecven sunt informaii suficiente
pentru a depista dac factorul este unitar, subunitar sau supraunitar. K
Mecanismul de adaptare const din dou filtre, unul trece sus FTS i unul
trece jos FTJ avnd caracteristicile de frecven din Fig.5.4.5. respectiv Fig.5.4.6.
ce pot corespunde unor elemente de tip PD respectiv PI.
dB
(PD)
FTS
L ()
TS
K
S
T s+1
S
( )
(PI)
dB
FTJ
L ()
TJ
K (Ts+1)
s
J J
Figura nr.5.4.5. Figura nr.5.4.6.
Filtrele sunt urmate de elemente de tip redresor i un element de
comparaie care acioneaz un element integrator ce poate determina creterea sau
scderea factorului de proporionalitate al legii de reglare. K
R
Se aranjeaz parametrii filtrelor i redresoarelor astfel nct componentele
continue la ieirea din redresoare s fie egale dac , adic s se K K
R
K
F
1
menin constant acea valoare a factorului de proporionalitate . K
R
Structura trebuie s determine reducerea factorului dac K
R
i creterea factorului dac . K K
R
K
F
> 1 K
R
K K
R
K
F
< 1
.
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
177
5.4.3. Sistem adaptiv cu semnal de prob zgomot alb
Acest sistem, prezentat n Fig.5.4.7., utilizeaz un semnal de prob , w(t)
de tip zgomot alb, aplicat la mrimea prescris astfel nct s nu afecteze
substanial calitatea procesului condus.
Prin intermediul unui corelator, se determin funcia de intercorelaie
dintre semnalul i mrimea reglat din care se deduce funcia R
wy
() w(t) y(t)
pondere a sistemului ncircuit nchis.
Pe baza acestor informaii se modific parametrii legii de reglare astfel
nct s se menin o anumit calitate a regimului rtranzitoriu.
i acest sistem face parte din catregoria sistemelor cu autoacordare dar n
cazul de faa se efectueaz o identificare a sistemului n circuit nchis.
Dezavantajul major l constituie semnalul de testare, de multe ori
neacceptat de beneficiarii sistemului de reglare.
y(t) y(t)
y(t)
w(t)
w(t)
(t)
s(s+2 )
Generator
de semnal
Corelator statistic
Blocul de ajustare
Calculul indicatorului
de calitate
h ( )
0
I
Parametri
Figura nr.5.4.7.
n cazul particular n care sistemul este liniar cu funcia de transfer n
circuit nchis de ordinul doi,
(5.4.51) H
v
n
2
s
2
+2
n
s +
n
2
se obin rezultate interesante care permit meninerea factorului de amortizare la
o valoare optim
(5.4.52)
opt
n caondiiile n care parametrul se modific dup legi necunoscute apriori.
n
Se consider c factorul este legat de parametrii legii de reglare, iar
n
depinde de parametrii variabili i necunoscui ain prii fixe, prin relaii
neexplicitate n acest exemplu.
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
178
Se presupune zgomotul de testare ca fiind un proces stochastic avnd W
t
ca realizare funcia de timp , semnalul obinut de la generator, i c are media w(t)
nul
(5.4.53) E{W
t
} w 0
iar densitatea spectral constant (zgomot alb),
. (5.4.54) S
w
(s) N
Aceasta corespunde unei funcii de corelaie de tip impuls Dirac,
. (5.4.55) R
w
() N ()
Componenta , a mrimii reglat , determinat de semnalul , y
w
(t) y(t) w(t)
poate fi interpretat ca o realizare a unui proces stochastic caracterizat printr-o Y
t
w
densitate spectral de intercorelaie S
wy
(s)
(5.4.56) S
wy
(s) H
V
(s) S
w
(s)
creia i corespinde funcia de intercorelaie R
wy
()
(5.4.57) R
wy
()
+
h
0
() R
w
( ) d
unde este funcia pondere a sistemului n circuit nchis h
0
(t)
(5.4.58) h
0
(t) L
1
{H
v
(s)}
Deoarece
(5.4.59) R
w
( ) N ( )
din integrala (5.4.57) conform proprietii de selecie a distribuiei Dirac se obine
(5.4.60) h
0
()
R
wy
()
N
Cu ajutorul dispozitivului fizic sau procedurilor de tip corelograf, se pot
calcula valorile funciei de intercorelaie pentru diferite valori ale R
wy
()
argumentului . De exemplu se poate utiliza relaia
(5.4.61) R
wy
()
1
T
+
w() y( + ) d
Rspunsul la intare treapt unitate (funcia indicial) al sistemului n circuit
nchis dat de (5.4.51), este
(5.4.62) y(t) h(t) 1
e
n
t
1
2
sin(
n
1
2
t +)
(5.4.63) arctg(
1
2
)
Se tie c ntre funcia pondere este derivata funciei indicial,
(5.4.64) h
0
(t)
h (t)
i se poate face reprezentarea din Fig.5.4.8.
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
179
h (t)
0
t t t
t
m1 m2 m3
m4
0
A
A
1
A
h(t)
t
t
Figura nr.5.4.8.
Timpii de extrem ai funciei indicial, respectiv timpii de anulae a funciei
pondere, sunt t
k
m
(5.4.65) t
k
m
k
n
1
2
, k 0
iar valorile extreme ale funciei indicial sunt date de,
(5.4.66) h(t
m
k
) 1 +(1)
k+1
k
unde
(5.4.67) e
1
2
Se definesc ariile funciei pondere ntre momentele i n funcie de t
k1
m
t
k
m
valorile funciei de intercorelaie, conform (5.4.60),
. (5.4.68) A
k
t
k1
m
t
k
m
h
0
() d
1
N
t
k1
m
t
k
m
R
wy
() d , k 1
Aceste arii pot fi evaluate pe baza datelor experimentale furnizate de
corelograf, prin aproximarea integralei printr-o sum.
Avnd n vedere (5.4.64) se exprim aceste arii prin valorile de extrem ale
funciei indiciale,
. (5.4.69) A
k
h(t
m
k
) h(t
m
k1
) (1)
k+1
k1
( + 1)
Se definesc sumele infinite pozitive i cele negative S
+
S
(5.4.70) S
+
A
1
+ A
3
+ A
5
+ ...
(5.4.71) S
A
2
+ A
4
+ A
6
+ ...
Cele dou sume infinite sunt sumele unor progresii geometrice cu raia
q
2
< 1
convergente ctre,
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
180
S
+
( + 1)
1
1
2
1
1
f
+
()
S
( +1)
1
1
2
1
f
()
Se formeaz un criteriu calitate
I A
+
A
1
1
f()
care este o funcie monoton n raport cu , i se calculeaz parametrul astfel
nct
. f(
opt
) 0
Cu aceste ajustri criteriul are forma din Fig.5.4.9. I
I
optim
Figura nr.5.4.9.
Dac nseamn c i trebuie redus i invers, dac I > 0 >
opt
I < 0
nseamn c i rebuie acionat asupra legii de reglare astfel nct s <
opt
creasc factorul .
Valorile lui criteriului I se determin experimental din A
+
i A
-
.
5. SISTEME ADAPTIVE 5.4. Exemple de sisteme adaptive
DE REGLARE AUTOMAT de reglare automat
181
BIBLIOGRAFIE
1. Astrom K.J., Wittenmark, B., On Self-Tunning Regulators, Automatica, Vol.9,
No.2, 185-189, 1973.
2. Astrom K.J., Hagglund L., Automatic Tuning of PID Controllers, Instrument
Society of America, 1988.
3. Babuia I, Dragomir T.L., s.a., Conducerea automat a proceselor, Editura Facla,
Timioara, 1985.
4. Blan T., Matematici speciale, Reprografia Universitii din Craiova, 1988.
5. Belea C., Teoria sistemelor automate,vol.I, Repr. Universitii din Craiova,1971.
6. Belea C., Automatica neliniar, Editura Tehnic, Bucureti, 1984.
7. Belea C., Automatica neliniar, Editura Tehnic, Bucureti, 1984.
8. Belea C., Teoria sistemelor, Editura Didactic i Pedagogic, Bucureti, 1985.
9. Belea C. ,Teoria Sistemelor. Sisteme neliniare, Editura Didactic i Pedagogic,
Bucureti, 1985.
10. Clin S., Belea C., Sisteme automate adaptive i optimale, Editura Tehnic,
Bucureti, 1971.
11. Clin S., Tertico M., Dumitrache I., Popeea C., Popescu D., Optimizri n
automatizri industriale, Editura Tehnic, Bucureti, 1973.
12. Clin S., Regulatoare automate, Edit. Did. i Pedagogic, Bucureti, 1976.
13. Clin S., Belea C., Sisteme automate complexe, Edit.Tehnic,Bucureti, 1981.
14. Calin S., Dumitrache I., s.a., Reglarea numeric a proceselor tehnologice,
Editura Tehnic, Bucureti, 1984.
15. Clin S., s.a., Sisteme automate numerice, Editura tiinific i Enciclopedic,
Bucureti, 1984.
16. Clin S., Dumitrache I., s.a., Reglarea numeric a proceselor tehnologice,
Editura Tehnic, Bucureti, 1984.
17. Clin S., Petrescu Gh., Tbu I., Sisteme automate numerice, Editura tiinfic i
Enciclopedic, Bucureti, 1984.
18. Clin S., Dumitrache I., Regulatoare automate, Editura Didactic i Pedagogic,
Bucureti, 1985.
19. Cernetki V.I., Diduk G., s.a., Metode matematice i algoritmi n studiul
sistemelor automate, Editura Tehnic, Bucureti, 1973.
20. Coloi T., Ignat I., Elemente de teoria sistemelor i reglaj automat, Litografia,
I.P. Cluj - Napoca, 1981.
21. Csaki I., Modern Control Theories, Akad. Kiado, Budapest, 1972.
22. Director S., Rohrer R., Introduction to system theory, Mc. Graw Hill, 1972.
23. Dorf R. ,Modern Control Systems, Addison Wesley Reading Mass. 1980.
24. Dragomir T.L.s.a., Regulatoare automate, Vol.2, Lit., I.P.Timioara, 1989.
25. Dragomir T.L., Elemente de teoria sistemelor, Edit. Politehnica,Timioara, 2004.
SISTEME NECONVENIONALE Bibliografie
DE REGLARE AUTOMAT
182
26. Dumitrache I., Tehnica reglrii automate, Editura Didactic i Pedagogic,
Bucureti, 1980.
27. Dumitrache I., Clin S. s.a., Automatizri i echipamente electronice, Editura
Didactic i Pedagogic, Bucureti, 1986.
28. Dumitrache I., Dumitriu S., s.a., Automatizri Electronice, Editura Didactic i
Pedagogic, Bucureti, 1993.
29. Huo J.B. ,Digital Control Systems ,Halt Reinerhardt and Winston Inc.,1980.
30. Houpis C., Lamont G., Digital control systems, Mc. Graw Hill, 1992.
31. Ionescu T., Sisteme i echipamente pentru conducerea proceselor, Editura
Didactic i Pedagogic, Bucureti, 1982.
32. Ionescu Vl. ,Teoria sistemelor liniare, Editura Didactic i Pedagogic,
Bucureti,1985.
33. Iserman R., Digital Control Systems, Springer Verlag, 1981.
34. Kailath Th. Linear Systems, Prentice-Hall Englewood Cliffs New-Jersey, 1980.
35. Kuo B. C., Sisteme automate cu eantionare, Editura Tehnic, Bucureti, 1967.
36. Kuo B. C., Automatic control systems, Prentice Hall, 1991.
37. Landau Y,D., Adaptive control-The model reference approach, Marcerl dekker,
New York, 1979.
38. Marin C., Nicolae D., Ivnescu M. ,Calculul si construcia regulatoarelor
automate, Indrumar de laborator, Reprografia Universitaii din Craiova, 1972.
39. Marin C.,Nicolae D. , Acordarea regulatoarelor bipoziionale, A. M. C . Nr.17,
Editura Tehnic, Bucureti, 1974.
40. Marin C., Teoria sistemelor de reglare automata, Reprografia Universitatii din
Craiova 1979.
41. Marin C., Popescu D. , Petre E., Asupra relaiei intrare-ieire la un regulator cu
comand n frecven de impulsuri, Al II-lea Simpozion Naional de Teoria
Sistemelor, Craiova , 1982.
42. Marin C., Regulatoare automate, ndrumar de proiectare, Reprografia
Universitii din Craiova,1983.
43. Marin C. ,Popescu D. , Petre E., Regulator numeric realizat cu microprocesor
INTEL 8080, Al IV-lea Simp. Naional de Teoria Sistemelor, Craiova, 1984.
44. Marin C., Adaptive Analog to Digital Conversion Algorithm, Analele
Universitaii din Craiova, 1993.
45. Marin C., Process Control Algorithm, UK Patent, Serial No 9313534.1/1992.
46. Marin C., Wood J., Apparatus for and Method of Controlling a Processs, USA
Patent, No 08/108622/1993.
47. Marin C., Petre E., Popescu D., Ionete C., Seliteanu D., Teoria sistemelor-
Probleme, Editura SITECH Craiova, 1997.
48. Marin C., Petre E., Popescu D., Ionete C. , Seliteanu D., Sisteme de reglare
automat-Lucrri practice I, Editura SITECH Craiova, 1997.
SISTEME NECONVENIONALE Bibliografie
DE REGLARE AUTOMAT
183
49. Marin C.,Petre E. , Popescu D., Ionete C., Seliteanu D., Sisteme de reglare
automat-Lucrri practice II, Editura SITECH Craiova, 1998.
50. Marin C. , System theory, Part one, Reprografia Universitatii din Craiova, 2000.
51. Marin C., Structuri i legi de reglare automat, Editura Universitaria, 2000
52. Marin C., Popescu D., Petre E., Ionete C., Seliteanu D., Teoria sistemelor,
Editura SITECH, Craiova, 2001.
53. Marin C., Ingineria reglrii automate-Elemente de analiz i sintez, Editura
SITECH, Craiova, 2004.
54. Ogata K., Discrete time control systems, Prentice Hall, 1987.
55. Preitl t., Precup R., Introducere n ingineria reglrii automate, Editura
Politehnica, Timioara, 2001.
56. Rsvan Vl., Teoria stabilitii, Edit. tiinific i Enciclopedic, Bucureti,1987.
57. Sastry S, s.a., Adaptive control, Prentice Hall, 1989.
58. Singeorzan D., Echipamente de reglare numeric, Edit. Militar, Bucureti,1980.
59. abac I., Matematici speciale, Editura Didactic i Pedagogic, Bucureti, 1981.
60. Vinatoru M., Sisteme automate, Editura SPICON, 1997.
61. Vinatoru M., Conducerea automat a proceselor industriale, Editura
Universitaria, Craiova, 2001.
62. Voicu M., Tehnici de analiz a stabilitii sistemelor automate, Ed.Tehnic,
Bucureti,1986.
63. Voicu M, Sisteme automate multivariabile, Editura Gh. Asachi, Iai, 1993.
64. Voicu M., Introducere n automatic, Editura POLIROM, 2002.
65. Wiberg D., State Space and Linear Systems , Mc. Graw Hill, 1971.
66. Williamson D., Digital control and implementation, Prentice Hall, 1991.
67. * * * MATLAB - User's Guide.
68. * * * Catalog West Instruments, Brighton, U.K.
SISTEME NECONVENIONALE Bibliografie
DE REGLARE AUTOMAT
184
S-ar putea să vă placă și
- Instalatii Electrice Navale Nanu Dumitru PDFDocument760 paginiInstalatii Electrice Navale Nanu Dumitru PDFCatalin Apetre100% (8)
- Carte - Actionari Electrice Reglabile Cu Masini de Curent ContinuuDocument194 paginiCarte - Actionari Electrice Reglabile Cu Masini de Curent ContinuuSeby AndreiÎncă nu există evaluări
- Actionari Cu Mot de InductieDocument88 paginiActionari Cu Mot de InductieVasi ValiÎncă nu există evaluări
- Mecanica StaticaDocument179 paginiMecanica StaticaIleana CîndeaÎncă nu există evaluări
- Suport Curs AutomatizariDocument234 paginiSuport Curs AutomatizariAndreeaIrinaÎncă nu există evaluări
- Ghid SCADA Ver. 2.0Document75 paginiGhid SCADA Ver. 2.0Claudiu VlasceanuÎncă nu există evaluări
- Curs+ +Algoritmica+GrafurilorDocument265 paginiCurs+ +Algoritmica+GrafurilorPelea100% (1)
- Cartea mică a ideilor mari: 150 de concepte și descoperiri care au schimbat istoriaDe la EverandCartea mică a ideilor mari: 150 de concepte și descoperiri care au schimbat istoriaÎncă nu există evaluări
- Ecuatii Cu Derivate Partiale de Ordinul Al DoileaDocument179 paginiEcuatii Cu Derivate Partiale de Ordinul Al DoileaFrancesco ValentinÎncă nu există evaluări
- Curs Tsra IraDocument371 paginiCurs Tsra IraRobert Allen HarkonennÎncă nu există evaluări
- Elemente de Teoria Sistemelor MultivariabileDocument187 paginiElemente de Teoria Sistemelor MultivariabileGheorghe GîlcăÎncă nu există evaluări
- Modele Matematice Ale Actionarilor M.A Prin Convertoare PDFDocument125 paginiModele Matematice Ale Actionarilor M.A Prin Convertoare PDFvalentinmullerÎncă nu există evaluări
- Disertatie Preda Valentin CASTR PDFDocument53 paginiDisertatie Preda Valentin CASTR PDFIoanaFlondorÎncă nu există evaluări
- Microsoft Word - Cuprins CursDocument8 paginiMicrosoft Word - Cuprins CursHitÎncă nu există evaluări
- Algoritmi Numerici Pentru Calcule Stiintifice in Ingineria Electrica - Gabriela Ciuprina Upb Elth (2013)Document216 paginiAlgoritmi Numerici Pentru Calcule Stiintifice in Ingineria Electrica - Gabriela Ciuprina Upb Elth (2013)rtec83Încă nu există evaluări
- Automatizarea Instalatiilor v2.2Document254 paginiAutomatizarea Instalatiilor v2.2Lica Emil100% (10)
- Carte - Elemente de Executie ElectriceDocument161 paginiCarte - Elemente de Executie ElectriceMarin AndraÎncă nu există evaluări
- Teoria SistemelorDocument365 paginiTeoria SistemelorVadeanu CristianÎncă nu există evaluări
- VAM-J - 4PRO487293-1 - Installer and User Reference Guide - RomanianDocument48 paginiVAM-J - 4PRO487293-1 - Installer and User Reference Guide - RomanianNicolae RoÎncă nu există evaluări
- Curs SFFDocument104 paginiCurs SFFHoza MarianaÎncă nu există evaluări
- Ingineria Reglarii Automate CursDocument79 paginiIngineria Reglarii Automate CursARazvan 123Încă nu există evaluări
- Echipamente Hidro-PneumaticeDocument190 paginiEchipamente Hidro-PneumaticeAndrada Spinean100% (1)
- !!! indrumarMN C++Document175 pagini!!! indrumarMN C++Vladimir STARÎncă nu există evaluări
- Metode NumericeDocument237 paginiMetode NumericeTudor SorinÎncă nu există evaluări
- Carte - Actionari Electrice Reglabile Cu Masini AsincroneDocument141 paginiCarte - Actionari Electrice Reglabile Cu Masini AsincroneMarcel GhitaÎncă nu există evaluări
- Actionari Electrice CursDocument303 paginiActionari Electrice Cursrtec83Încă nu există evaluări
- Indrumar LMN2012Document237 paginiIndrumar LMN2012Ioana ApostolÎncă nu există evaluări
- Sisteme Automate SorescuDocument283 paginiSisteme Automate Sorescuonlyforgod50% (2)
- Carte FiabilitateDocument208 paginiCarte FiabilitateAdrian PușcașuÎncă nu există evaluări
- Motoare Si AutovehiculeDocument100 paginiMotoare Si AutovehiculeCiumegu Jmecher100% (1)
- Matematici Aplicate in Economie - 2011 - Pagini Tehnice, CuprinsDocument7 paginiMatematici Aplicate in Economie - 2011 - Pagini Tehnice, CuprinsIonutz GasparÎncă nu există evaluări
- Partea Tehnica FinalaDocument96 paginiPartea Tehnica FinalaCazan Stelian100% (1)
- Studiul Sistemului de FranareDocument55 paginiStudiul Sistemului de FranareChiriac Andreea RalucaÎncă nu există evaluări
- Sistem Inteligent de Control Al Alimentarii Vehiculelor Electrice PDFDocument66 paginiSistem Inteligent de Control Al Alimentarii Vehiculelor Electrice PDFȘtefan VelixÎncă nu există evaluări
- Statii Electrice Si Posturi de TransformareDocument357 paginiStatii Electrice Si Posturi de Transformarertec8392% (12)
- Curs Algoritmica Grafurilor PDFDocument265 paginiCurs Algoritmica Grafurilor PDFLaura MorosanÎncă nu există evaluări
- Actionari Electrice de CCDocument239 paginiActionari Electrice de CCConstantin Popa67% (3)
- Fizica fenomenologică: Compendiu - Volumul 2De la EverandFizica fenomenologică: Compendiu - Volumul 2Evaluare: 5 din 5 stele5/5 (1)
- C1 BNAIA Retele Neuronale NaturaleDocument6 paginiC1 BNAIA Retele Neuronale NaturaleStefanitza Catalin NeamtuÎncă nu există evaluări
- SLRA 20ian09Document283 paginiSLRA 20ian09Stefanitza Catalin NeamtuÎncă nu există evaluări
- SIM Cursul 1-2Document9 paginiSIM Cursul 1-2Stefanitza Catalin NeamtuÎncă nu există evaluări
- SIM Cursul 6-7-8Document19 paginiSIM Cursul 6-7-8Stefanitza Catalin NeamtuÎncă nu există evaluări
- SIM Cursul 3-4-5Document28 paginiSIM Cursul 3-4-5Stefanitza Catalin NeamtuÎncă nu există evaluări
- Cerintele Software GrilaDocument2 paginiCerintele Software GrilaStefanitza Catalin NeamtuÎncă nu există evaluări
- SNR Cap 3 Sisteme Numerice de Reglare AutomataDocument101 paginiSNR Cap 3 Sisteme Numerice de Reglare AutomataStefanitza Catalin NeamtuÎncă nu există evaluări
- Cerintele SoftDocument14 paginiCerintele SoftStefanitza Catalin NeamtuÎncă nu există evaluări
- Subiecte-Sisteme Informatice MedicaleDocument1 paginăSubiecte-Sisteme Informatice MedicaleStefanitza Catalin NeamtuÎncă nu există evaluări
- SIM Cursul 12Document6 paginiSIM Cursul 12Stefanitza Catalin NeamtuÎncă nu există evaluări
- SIM Cursul 9Document18 paginiSIM Cursul 9Stefanitza Catalin NeamtuÎncă nu există evaluări
- SLRA 20ian09Document283 paginiSLRA 20ian09Stefanitza Catalin NeamtuÎncă nu există evaluări
- SIM Cursul 12Document6 paginiSIM Cursul 12Stefanitza Catalin NeamtuÎncă nu există evaluări
- Subiecte-Sisteme Informatice MedicaleDocument1 paginăSubiecte-Sisteme Informatice MedicaleStefanitza Catalin NeamtuÎncă nu există evaluări
- SIM Cursul 1-2Document9 paginiSIM Cursul 1-2Stefanitza Catalin NeamtuÎncă nu există evaluări
- 00 Start ActivitateDocument4 pagini00 Start ActivitateStefanitza Catalin NeamtuÎncă nu există evaluări
- SIM Cursul 1-2Document9 paginiSIM Cursul 1-2Stefanitza Catalin NeamtuÎncă nu există evaluări
- Elemente de ProiectareDocument2 paginiElemente de ProiectareStefanitza Catalin NeamtuÎncă nu există evaluări
- Prim AjutorDocument10 paginiPrim AjutorPetrescu AuraÎncă nu există evaluări
- DepozitareDocument7 paginiDepozitareMaria SolonaruÎncă nu există evaluări
- Barem Model Matematica Filiera Teoretică, Profilul Real, Specializarea Mate-Info Și Filiera Vocaţională, Profilul Militar, Specializarea Mate-InfoDocument2 paginiBarem Model Matematica Filiera Teoretică, Profilul Real, Specializarea Mate-Info Și Filiera Vocaţională, Profilul Militar, Specializarea Mate-InfoIoana NicolescuÎncă nu există evaluări
- Cerinte Minime Protectia Muncii Pe SantierDocument2 paginiCerinte Minime Protectia Muncii Pe SantierCosmin CinciÎncă nu există evaluări
- An Ex A 1Document70 paginiAn Ex A 1Stefanitza Catalin NeamtuÎncă nu există evaluări
- Protectia Muncii: NSSM 42 Norme de Securitate A Muncii Pentru Constructii Si Confectii MetaliceDocument20 paginiProtectia Muncii: NSSM 42 Norme de Securitate A Muncii Pentru Constructii Si Confectii MetaliceStefanitza Catalin NeamtuÎncă nu există evaluări
- ProtectiaDocument55 paginiProtectiaToader GabrielÎncă nu există evaluări
- 2012 ACE ModelLucrareDisertatieDocument29 pagini2012 ACE ModelLucrareDisertatieMarian VaduvaÎncă nu există evaluări
- Materiale Pentru Zidarii Si TencuieliDocument40 paginiMateriale Pentru Zidarii Si TencuielicorneliamarcelaÎncă nu există evaluări