S-ar putea să vă placă și
- Scheme Electrice de AcţionăriDocument12 paginiScheme Electrice de AcţionăriGhioc Iuliana100% (2)
- Elemente de ExecuţieDocument9 paginiElemente de ExecuţieSiimo Ssv0% (1)
- Regimurile de Functionare Ale Masinii AsincroneDocument8 paginiRegimurile de Functionare Ale Masinii Asincronemihaela plesea100% (1)
- Proiect Pornirea Stea-Triunghi A Unui Motor AsincronDocument22 paginiProiect Pornirea Stea-Triunghi A Unui Motor AsincronweekendÎncă nu există evaluări
- Proiect Actionari ElectriceDocument13 paginiProiect Actionari ElectriceAxel XÎncă nu există evaluări
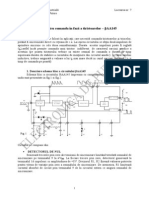
- L7 - Circuit Pentru Comanda in Faza A Tiristoarelor BA 145Document4 paginiL7 - Circuit Pentru Comanda in Faza A Tiristoarelor BA 145Vlad StanÎncă nu există evaluări
- Indrumar de Laborator Actionari Electrice NavaleDocument81 paginiIndrumar de Laborator Actionari Electrice NavaleVlad VraciuÎncă nu există evaluări
- Proiect Componente MecatroniceDocument15 paginiProiect Componente MecatroniceAnca FronoiuÎncă nu există evaluări
- Scheme Electrice de ActionariDocument10 paginiScheme Electrice de ActionariIulian RosuÎncă nu există evaluări
- Pornirea Y-DDocument12 paginiPornirea Y-DBilinschi Luca Ionel100% (1)
- Reglarea Turaţiei Motoarelor ElectriceDocument15 paginiReglarea Turaţiei Motoarelor ElectriceDumitru Sorin CosminÎncă nu există evaluări
- Elemente de ExecutieDocument16 paginiElemente de ExecutieSergiu Sandru100% (1)
- Reglarea Turatiei Unui Mcc-PROIECTDocument16 paginiReglarea Turatiei Unui Mcc-PROIECTLavinia GeorgianaÎncă nu există evaluări
- Zreglarea TuraţieiDocument14 paginiZreglarea TuraţieiIonutÎncă nu există evaluări
- CSFDocument8 paginiCSFVictor TudoracheÎncă nu există evaluări
- 5.MASINA ASINCRONA-metode de PornireDocument7 pagini5.MASINA ASINCRONA-metode de PornireGabitza GabrielaÎncă nu există evaluări
- Sisteme de Acţionare Pentru Reglarea Automată A Poziţiei Utilizând Motoare AsincroneDocument14 paginiSisteme de Acţionare Pentru Reglarea Automată A Poziţiei Utilizând Motoare AsincroneCraciun AlexÎncă nu există evaluări
- Sistem de Actionare Electrica Cu Motor de Curent Continuu Pentru o Sarcina PotentialaDocument21 paginiSistem de Actionare Electrica Cu Motor de Curent Continuu Pentru o Sarcina PotentialanumaionelÎncă nu există evaluări
- Convertizoare de FrecventaDocument3 paginiConvertizoare de FrecventaIonica IonÎncă nu există evaluări
- Micromotor Control LiniarDocument19 paginiMicromotor Control LiniarRusu CristianÎncă nu există evaluări
- Stand de TestareDocument8 paginiStand de TestareAndra AndrutzaÎncă nu există evaluări
- C ActionariDocument27 paginiC ActionariAlyFlyÎncă nu există evaluări
- 4.masina de C.CDocument6 pagini4.masina de C.CGabitza GabrielaÎncă nu există evaluări
- L2 MPPDocument11 paginiL2 MPPBuțurcă DănuțÎncă nu există evaluări
- Ministerul Educației Și Cercetării Al Republicii Moldov4Document6 paginiMinisterul Educației Și Cercetării Al Republicii Moldov4Daniel Cheptănari lordsÎncă nu există evaluări
- Incercare TrafDocument13 paginiIncercare TrafnaiditzaÎncă nu există evaluări
- Pornirea Motoarelor ElectriceDocument11 paginiPornirea Motoarelor ElectricecudalbgeoÎncă nu există evaluări
- Probleme LicentaDocument56 paginiProbleme LicentaConstantin Gabriel DobreanÎncă nu există evaluări
- Convertoare de Curent Continuu Si de Curent Alternativ Cu Caracter Sursa de Tensiune Cu Modulatia PulsuluiDocument14 paginiConvertoare de Curent Continuu Si de Curent Alternativ Cu Caracter Sursa de Tensiune Cu Modulatia Pulsuluispace_monkey_no992221Încă nu există evaluări
- Lab 6 MEA OvcearencoDocument4 paginiLab 6 MEA OvcearencoBogdanÎncă nu există evaluări
- Șapira AndreiDocument4 paginiȘapira AndreiAdi TurcanuÎncă nu există evaluări
- Studiul Intreruptoarelor Ultrarapide de Curent ContinuDocument7 paginiStudiul Intreruptoarelor Ultrarapide de Curent ContinuBozianu AndreiÎncă nu există evaluări
- Masina AsincronaDocument4 paginiMasina AsincronaFicu GheorgheÎncă nu există evaluări
- Pornirea Y-DDocument12 paginiPornirea Y-DDinu DavidÎncă nu există evaluări
- Pornirea Y-DDocument12 paginiPornirea Y-DOrjanu Myhay RobertÎncă nu există evaluări
- Lucrare11 Sursa PCDocument4 paginiLucrare11 Sursa PCAlina PricopieÎncă nu există evaluări
- 6.MASINA ASINCRONA Functionarea in Condiftii DiferiteDocument7 pagini6.MASINA ASINCRONA Functionarea in Condiftii DiferiteGabitza GabrielaÎncă nu există evaluări
- Softstartere Si VariatoareDocument19 paginiSoftstartere Si VariatoareReut Rafael100% (1)
- Convertoare de Curent Continuu Si de Curent Alternativ Cu Caracter Sursa de Tensiune Cu Modulatia PulsuluiDocument14 paginiConvertoare de Curent Continuu Si de Curent Alternativ Cu Caracter Sursa de Tensiune Cu Modulatia PulsuluiPall FerencÎncă nu există evaluări
- Neratorul Sincron Conectat La ReteaDocument5 paginiNeratorul Sincron Conectat La ReteaGabitza GabrielaÎncă nu există evaluări
- l05 - Sistem de Actionare Electrica Cu Masina Asincrona În Regim de Frânare DinamicaDocument6 paginil05 - Sistem de Actionare Electrica Cu Masina Asincrona În Regim de Frânare DinamicapavelpopescuÎncă nu există evaluări
- Aplicaţiile Motorului Asincron Ca GeneratorDocument15 paginiAplicaţiile Motorului Asincron Ca Generatorlionesssssssss100% (1)
- Laboratorul II (Pornirea Stea-Triunghi A Motorului Asincron Trifazat)Document5 paginiLaboratorul II (Pornirea Stea-Triunghi A Motorului Asincron Trifazat)Micu Adrian DanutÎncă nu există evaluări
- Proiect Ira - Conducerea Si Reglarea Unui Motor de Curent ContinuuDocument18 paginiProiect Ira - Conducerea Si Reglarea Unui Motor de Curent Continuunumer_nine99Încă nu există evaluări
- CS Vta 14Document14 paginiCS Vta 14Dobrescu AlexandruÎncă nu există evaluări
- 04 Masina AsincronaDocument7 pagini04 Masina AsincronaTroy BakerÎncă nu există evaluări
- L08 - Reglarea Vitezei Unui SAE Cu M.C.C. Ex. Sep. Prin Modificarea Tensiunii de Alimentare Si A Fluxului InductorDocument4 paginiL08 - Reglarea Vitezei Unui SAE Cu M.C.C. Ex. Sep. Prin Modificarea Tensiunii de Alimentare Si A Fluxului InductorpavelpopescuÎncă nu există evaluări
- Probleme MCCDocument9 paginiProbleme MCCBo BogdanÎncă nu există evaluări
- Dumea Iosif - Sisteme Moderne de Comanda A Masinilor de Curent Alternativ Cu CSFDocument5 paginiDumea Iosif - Sisteme Moderne de Comanda A Masinilor de Curent Alternativ Cu CSFRoxana GalatanuÎncă nu există evaluări
- Producerea Energiei Electrice Cu Panouri SolareDocument11 paginiProducerea Energiei Electrice Cu Panouri SolareAnca Manuela PopescuÎncă nu există evaluări
- Instalatii Electrice de PutereDocument11 paginiInstalatii Electrice de PutereOvidiu MATEIÎncă nu există evaluări
- Lab4 Tsa OvcearencoDocument7 paginiLab4 Tsa OvcearencoBogdanÎncă nu există evaluări
- Lab 4 SO OvcearencoDocument10 paginiLab 4 SO OvcearencoBogdanÎncă nu există evaluări
- Laborator Nr.3 SED CaraDocument4 paginiLaborator Nr.3 SED CaraBogdanÎncă nu există evaluări
- Lab3 So OvcearencoDocument6 paginiLab3 So OvcearencoBogdanÎncă nu există evaluări
- Lab 2 SO OvcearencoDocument8 paginiLab 2 SO OvcearencoBogdanÎncă nu există evaluări
- Lab 1 SO OvcearencoDocument6 paginiLab 1 SO OvcearencoBogdanÎncă nu există evaluări