Documente Academic
Documente Profesional
Documente Cultură
Modelarea Convertoarelor
Încărcat de
Katona MariusTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Modelarea Convertoarelor
Încărcat de
Katona MariusDrepturi de autor:
Formate disponibile
FACULTATEA DE ELECTRONIC, TELECOMUNICAII I TEHNOLOGIA INFORMAIEI
Ing. Adrian Ctlin Tut
TEZ DE DOCTORAT
MODELAREA CONVERTOARELOR N COMUTAIE
Conductor tiinific, Prof.dr.ing.erban Lungu Comisia de evaluare a tezei de doctorat:
PREEDINTE: MEMBRI: - Prof.dr.ing. Marina opa - Decan, Facultatea de Electronic, Telecomunicaii i Tehnologia Informaiei, Universitatea Tehnic din Cluj-Napoca; - Prof.dr.ing. erban Lungu - Conductor tiinific, Facultatea de Electronic, Telecomunicaii i Tehnologia Informaiei, Universitatea Tehnic din Cluj-Napoca; - Prof.dr.ing. Paul Svasta - Referent, Facultatea de Electronic i Telecomunicaii, Universitatea Politehnica din Bucureti; - Prof.dr. ing. Petre Ogruan - Referent, Facultatea de Inginerie Electric i tiina Calculatoarelor, Universitatea Transilvania din Braov; - Conf.dr.ing. Ovidiu Pop Referent, Facultatea de Electronic, Telecomunicaii i Tehnologia Informaiei, Universitatea Tehnic din Cluj-Napoca;
Modelarea convertoarelor n comutaie_______________________________________________
Cuprins
1 Introducere _______________________________________________________________________ 1 1.1 1.2 2 Obiectivele tezei ______________________________________________________________ 3 Structura tezei ________________________________________________________________ 5
Capitolul II. Analiza, modelarea matematic, simularea i implementarea convertoarelor c.a.-c.c. __ 7 2.1 2.2 2.3 2.3.1 2.3.2 2.3.3 2.3.4 2.4 2.4.1 2.4.2 2.5 2.5 Clasificare i ipoteze de studiu ___________________________________________________ 7 Transformatorul _______________________________________________________________ 8 Redresoare monofazate monoalternan ___________________________________________ 12 Redresoare monofazate monoalternan cu sarcin rezistiv _________________________ 12 Redresoare monofazate monoalternan cu sarcin rezistiv capacitiv. _________________ 14 Modelul matematic realizat pentru simularea redresoarelor monoalternan _____________ 16 Redresoare monofazate monoalternan cu sarcin rezistiv inductiv __________________ 22 Redresoare monofazate dubl alternan ___________________________________________ 25 Redresoare dubl alternan cu sarcin rezistiv ___________________________________ 26 Redresoare monofazate dubl alternan cu sarcin RC paralel _______________________ 28 Concluzii i contribuii personale ________________________________________________ 32 Bibliografie selectiv __________________________________________________________ 34
Capitolul III. Analiza, modelarea matematic, simularea i implementarea convertoarelor c.c.-c.c. _ 36 3.1 3.1.1 Convertoare c.c-c.c fr separare galvanic ________________________________________ 37 Convertorul cobortor (Buck) _________________________________________________ 37 Implementarea practic a convertorului Buck n bucl nchis ___________________ 44
3.1.1.1 3.1.2 3.1.3
Convertorul ridictor (Boost) _________________________________________________ 48 Convertorul inversor (Buck-Boost) _____________________________________________ 56
3.1.4 Platform Matlab de simulare i proiectare a convertoarelor n comutaie fr separare galvanic _______________________________________________________________________ 59 3.1.4.1 3.1.4.2 3.1.4.3 Simulrile convertorului Buck n regim CCM i DCM de funcionare. _____________ 60 Simulrile convertorului Boost n regim CCM i DCM de funcionare. ____________ 63 Simulrile convertorului Buck-Boost n regim CCM i DCM de funcionare. _______ 66
ii
Universitatea Tehnic din Cluj-Napoca_______________________________________________
3.2 3.2.1 3.2.2 3.3 3.4 4 Convertoare CC-CC cu separare galvanic _________________________________________ 69 Convertorul Forward ________________________________________________________ 69 Convertorul Flyback ________________________________________________________ 75 Concluzii i contribuii personale ________________________________________________ 78 Bibliografie selectiv __________________________________________________________ 80
Analiza, modelarea matematic, simularea i implementarea convertoarelor c.c.-c.a. ____________ 82 4.1 4.1.1 4.1.2 Invertoare de tensiune cu tensiune dreptunghiular la ieire ____________________________ 83 Invertorul monofazat n semipunte _____________________________________________ 83 Invertorul monofazat n punte _________________________________________________ 84 Comanda simetric _____________________________________________________ 85 Comanda asimetric ____________________________________________________ 87
4.1.2.1 4.1.2.2 4.1.3 4.2 4.2.1 4.2.2 4.2.3
Simularea invertoarelor cu und dreptunghiular la ieire ___________________________ 89 Invertoare rezonante __________________________________________________________ 92 Invertoarele rezonante de tip serie (sau cu alimentare n tensiune)_____________________ 93 Invertoare rezonante de tip paralel (sau alimentate n curent) ________________________ 94 Modelarea i simularea invertoarelor rezonante ___________________________________ 96 Modelarea invertorului rezonant n semipunte ________________________________ 96 Modelarea invertorului rezonant n punte __________________________________ 104
4.2.3.1 4.2.3.2 4.3 4.3.1 4.4
Invertoare rezonante serie-paralel n clas D. Modelare i implementare. ________________ 121 Implementarea practic _____________________________________________________ 128 Concluzii i contribuii personale _______________________________________________ 131
5 Simularea i implementarea experimental a unui sistem cu convertor n punte H i circuit de corecie a factorului de putere _________________________________________________________________ 135 5.1 5.2 5.2.1 Convertorul Boost cu corecia factorului de putere __________________________________ 139 Strategii de control al curentului si corecia activ a factorului de putere. ________________ 140 Preregulatoare cu controlul valorii medii a curentului _____________________________ 141
5.3 Proiectarea convertorului Boost cu corecia factorului de putere prin metoda valorii medii a curentului ________________________________________________________________________ 142 5.4 Convertor n punte H _________________________________________________________ 162
iii
Modelarea convertoarelor n comutaie_______________________________________________
5.4.1 5.5 5.6 6 7 Implementarea convertorului n punte H________________________________________ 164 Concluzii i contribuii personale _______________________________________________ 168 Bibliografie selectiv _________________________________________________________ 170
Concluzii i contribuii personale ____________________________________________________ 172 Bibliografie ____________________________________________________________________ 176
Anexa 2-1 __________________________________________________________________________ 181 Anexa 2-2 __________________________________________________________________________ 184 Anexa 3-1 __________________________________________________________________________ 192 Anexa 3-2 __________________________________________________________________________ 196 Anexa 3.4 __________________________________________________________________________ 202 Anexa 4.1. __________________________________________________________________________ 206 Anexa 4-4. __________________________________________________________________________ 214 Anexa 4-6. __________________________________________________________________________ 221 Anexa 5-1. __________________________________________________________________________ 222
iv
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Lista figurilor
Figura 1. 1 Evoluia vnzrilor convertoarelor n comutaie. Sursa: The Worldwide Market for Power Supplies .................................................................................................................... 2 Figura 1. 2 Organigrama de lucru ............................................................................................. 4
Figura 2. 1 Schema de principiu a unui sistem de alimentare n curent continuu alimentat de la reeaua de tensiune alternativ. ............................................................................................. 7 Figura 2. 2 a) transformator ideal; b) schema transformatorului pentru analiza n timp a funcionrii ................................................................................................................................ 9 Figura 2. 3 Rezutatele simulrii unui transformator cu platforma Matlab implementat a), rezultatele obinute pentru validarea platformei cu simulatorul PSpice b), pentru setul 1 de valori ....................................................................................................................................... 10 Figura 2. 4 Rezultatele simulrii obinute pentru setul 2 de valori a) platform Matlab, b) simulatorul PSpice, cu meniunea c, curentul din secundar a fost multiplicat de 10 ori n ambele simulri ....................................................................................................................... 11 Figura 2. 5 Schema unui redresor monofazat monoalternan cu sarcin rezistiv ................ 12 Figura 2. 6 Schema de principiu a redresorului monofazat monoalternana cu sarcin RC ... 14 Figura 2. 7 a) Formele de und caracteristice ale unui redresor monofazat monoalternan cu sarcin RC paralel, plot 1 curent primar, curent secundar, plot 2 tensiune primar, plot 3 tensiunea secundar, tensiunea de sarcin; b) variaiile 1 i 2 n funcie de R C plot 1, variaia curentului plot 2 i variaia tensiunii plot 3 ............................................................... 16 Figura 2. 8 Modelele diodei folosite n ipotezele analizei matematice................................... 17 Figura 2. 9 Rezultate obinute n urma simulrii cu platforma Matlab pentru un redresor monoalternan cu sarcin rezistiv i nfurrile transformatorului n faz. a) setul 1 de valori, b) setul 2 de valori ....................................................................................................... 20 Figura 2. 10 Rezultate obinute n urma simulrii cu platforma Matlab pentru un redresor monoalternan cu sarcin RC paralel i nfurrile transformatorului n faz. a), i b) simulare Pspice pentru setul 1 de valori. ................................................................................ 20
Modelarea convertoarelor n comutaie_______________________________________________ Figura 2. 11 Setul 2 de valori pentru redresoarele monofazate monoalternan a) n faz, b) n antifaz .................................................................................................................................... 20 Figura 2. 12 Rezultate obinute pentru setul 1 de valori cu nfurrile transformatorului n antifaz a) platforma Matlab, b) simulare PSpice, cu meniunea c tensiunea din secundar este multiplicat de 5 ori ......................................................................................................... 21 Figura 2. 13 Rezultate experimentale obinute n urma achiziiei semnalelor de pe osciloscop i prelucrate n platforma Matlab. a) redresor monofazat cu sarcin RC paralel n faz, b) redresor monofazat cu sarcin RC paralel n antifaz ............................................................ 22 Figura 2. 14 Schema de principiu a unui redresor monofazat monoalternan cu sarcin RL 23 Figura 2. 15 Formele de und ale unui redresor monofazat monoalternan cu sarcin RL, L=10mH, R=10 Ohm; a) simulare Matlab, b) simulare PSpice .................................. 25 Figura 2. 16 Schema de principiu a unui redresor monofazat dubl alternan a) cu priz median, b) n punte de diode ................................................................................................. 26 Figura 2. 17 Schema de principiu a redresoarelor dubl alternan cu sarcin RC paralel a) cu priz median, b) n punte de diode, c) formele de und caracteristice ale tensiunii de ieire 28 Figura 2. 18 Simulare Matlab a redresoarelor dubl alternan cu sarcin RC paralel pentru setul 2 de valori conform tabelului 2.4. a) regimul tranzitoriu; b) regimul permanent .......... 31 Figura 2. 19 Simulare PSpice a redresorului dubl alternan cu setul 2 de valori n regim permanent................................................................................................................................ 31 Figura 2. 20 Simulare Matlab a redresorului dubl alternan cu sarcina RC pentru setul 1 de valori. a) regim tranzitoriu, b) regim permanent...................................................... 32 Figura 2. 21 Simulri PSpice a redresorului dubl alternan cu setul 2 de valori n regim tranzitoriu i permanent ......................................................................................................... 32
Figura 3. 1 a) Topologia de principiu a convertorului Buck; b) forma curentului n regim CCM de funcionare; c) forma curentului n regim DCM de funcionare .............................. 38 Figura 3. 2 Caracteristica de transfer n tensiune a convertorului Buck n funcie de factorul de umplere D i raporul 2L/RT ............................................................................................... 41 Figura 3. 3 Rezultatele obinute n urma simulrii Matlab a convertorului Buck n bucl nchis cu sarcin variabil: R=10 Ohm pentru 0-N/3 perioade, R=5 Ohm pentru N/3 2N/3
vi
Universitatea Tehnic din Cluj-Napoca_______________________________________________ perioade, R=20 Ohm pentru 2N/3 - N perioade de vizualizare, pentru o tensiune de referin de 5.5V i o tensiune de alimentare E=11V............................................................................ 43 Figura 3. 4 Rezultatele obinute n urma simulrii Matlab a convertorului Buck n bucl nchis cu tensiune de intrare variabil: E=40 V pentru 0-N/3 perioade, E=20 V pentru N/3 2N/3 perioade, E=60 V pentru 2N/3 - N perioade de vizualizare, pentru o tensiune de referin de 10 V i o rezisten de sarcin R=5 Ohm . .......................................................... 43 Figura 3. 5 Schema logic a algoritmului de control .............................................................. 45 Figura 3. 6 Forma de und a tensiunii de ieire a convertorului Buck achiziionat cu ajutorul unui dataloger.......................................................................................................................... 46 Figura 3. 7 Forma de und a tensiunii de ieire a convertorului Buck achiziionate cu ajutorul unui dataloger.......................................................................................................................... 46 Figura 3. 8 Forma de und a tensiunii la ieirea convertorului Buck cu tensiunea de referin 5V. a) la pornire curent de sarcin 500mA, b) salt de curent de la 500mA la 1A, cu factor de umplere lent variabil ............................................................................................................... 46 Figura 3. 9 Forma de und a tensiunii la ieirea convertorului Buck cu tensiunea de referin 5V. a) la pornire curent de sarcin 500mA, b) salt de curent de la 500mA la 1A, cu factor de umplere rapid variabil ............................................................................................................. 47 Figura 3. 10 Variaia tensiunii de sarcin la variaia tensiunii de intrare pentru algoritmul doi i uref 5V .................................................................................................................................. 48 Figura 3. 11 Schema de principiu a convertorului Boost........................................................ 48 Figura 3. 12 Formele de und caracteristice convertorului Boost n regim staionar ............. 49 Figura 3. 13 Formele de und ale curentului i tensiunii pe bobin n regim ntrerupt de funcionare .............................................................................................................................. 52 Figura 3. 14 Caracteristica de transfer n tensiune n funcie de factorul de umplere D i raportul 2L/RT ........................................................................................................................ 54 Figura 3. 15 Reprezentarea grafic a condiiei regimurilor de lucru ...................................... 55 Figura 3. 16 Schema de principiu a convertorului Buck-Boost .............................................. 56 Figura 3. 17 Formele de und ale curentului i tensiunii pe bobina L caracteristice convertorului Buck-Boost ....................................................................................................... 56 Figura 3. 18 Variaia raportului de transfer n tensiune a convertorului Buck-Boost............ 58
vii
Modelarea convertoarelor n comutaie_______________________________________________ Figura 3. 19 Organigrama platformei Matlab ......................................................................... 59 Figura 3. 20 Simulare cu platforma Matlab a convertorului Buck n modul CCM regim tranzitoriu i permanent pentru setul 1 de valori .................................................................... 61 Figura 3. 21 Simulare cu platforma Matlab a convertorului Buck n modul DCM regim tranzitoriu i permanent pentru setul 1 de valori .................................................................... 61 Figura 3. 22 Simulare cu platforma Matlab a convertorului Buck pentru setul 2 de valori n regim permanent; a) modul CCM; b) modul DCM ................................................................ 62 Figura 3. 23 Simulare cu platforma Matlab a convertorului Boost n modul CCM regim tranzitoriu i permanent pentru setul 1 de valori .................................................................... 64 Figura 3. 24 Simulare cu platforma Matlab a convertorului Boost n modul DCM regim tranzitoriu i permanent pentru setul 1 de valori .................................................................... 64 Figura 3. 25 Simulare cu platforma Matlab a convertorului Boost pentru setul 2 de valori n regim permanent; a) modul CCM; b) modul DCM ................................................................ 65 Figura 3. 26 Simulare cu platforma Matlab a convertorului Buck-Boost n modul a) CCM i b) DCM regim permanent pentru setul 1 de valori ................................................................. 67 Figura 3. 27 Simulare cu platforma Matlab a convertorului Buck-Boost pentru setul 2 de valori n regim permanent; a) modul CCM; b) modul DCM .................................................. 67 Figura 3. 28 Schema de principiu a convertorului Forward ................................................... 69 Figura 3. 29 Schema convertorului Forward implementat n platforma Matlab................... 70 Figura 3. 30 Schema echivalent a convertorului Forward pentru primul interval de funcionare .............................................................................................................................. 70 Figura 3. 31 Schema echivalent a convertorului Forward pentru al doilea interval de funcionare .............................................................................................................................. 71 Figura 3. 32 Schema echivalent a convertorului Forward pentru intervalul al treilea de funcionare .............................................................................................................................. 72 Figura 3. 33 Rezultatele obinute n urma simulrii convertorului Forward n regim tranzitoriu i permanent .......................................................................................................... 73 Figura 3. 34 Simulare cu platforma Matlab a convertorului Forward n regim permanent: a) cu nfurarea 3 diferit de nfurarea 1; b) cu raport de transformare de 2.29 ................... 73
viii
Universitatea Tehnic din Cluj-Napoca_______________________________________________ Figura 3. 35 Simulare cu platforma Matlab a convertorului Forward n regim permanent cu factor de umplere de 70% cu nfurrile unu i trei egale ..................................................... 74 Figura 3. 36 Schema de principiu a convertorului Flyback .................................................... 75 Figura 3. 37 Simulare convertor Flyback cu platforma Matlab implementat; a) la pornire 5 perioade, b) regim tranzitoriu ................................................................................................. 77 Figura 3. 38 Simulare convertor Flyback n regim permanent ............................................... 78
Figura 4. 1 Schema de principiu a unui invertor monofazat n semipunte i formele de und caracteristice acestui invertor pentru o sarcin inductiv sau o sarcin capacitiv. ............... 83 Figura 4. 2 Schema de principiu a unui invertor monofazat n punte ..................................... 85 Figura 4. 3 Formele de und ale unui invertor monofazat monoalternan a) cu sarcin rezistiv-inductiv; b) cu sarcin rezistiv capacitiv ................................................................ 86 Figura 4. 4 Intervalele de comand ale comutatoarelor invertorului n punte pentru comanda asimetric ................................................................................................................................ 87 Figura 4. 5 Formele de und a invertorului monofazat n punte: a) sarcin inductiv; b) sarcin capacitiv .................................................................................................................... 88 Figura 4. 6 Schema de simulare PSpice a invertorului n punte monofazat cu sarcin rezistiv inductiv.................................................................................................................................. 89 Figura 4. 7 Formele de und obinute n urma simulrii invertorului; a) sus tensiunea pe sarcin, jos curentul pe sarcin; b) curentul prin tranzistorul K1 sus, curentul prin dioda D1 jos ............................................................................................................................................ 90 Figura 4. 8 Formele de und obinute n urma simulrii invertorului; a) semnalele de comand pentru K1 (sus) i K3 (jos); b) formele de und ale tensiunii (sus) i curentului (jos) pe sarcin. ............................................................................................................................... 91 Figura 4. 9 a) sus tensiunea pe rezisten, jos tensiunea pe bobin; b) sus curentul prin tranzistorul K1, jos curentul prin dioda D1 ............................................................................ 91 Figura 4. 10 Schema echivalent a invertorului cu sarcin rezonant serie. a) invertor rezonant n semipunte; b) invertor rezonant n punte ............................................................. 93 Figura 4. 11 Formele de und ale curentului i tensiunii la bornele sarcinii .......................... 94
ix
Modelarea convertoarelor n comutaie_______________________________________________ Figura 4. 12 Schema echivalent a invertorului cu sarcin rezonant paralel. a) invertor rezonant cu sarcin paralel n semipunte; b) invertor rezonant cu sarcin paralel n punte ... 95 Figura 4. 13 Formele de und ale curentului i tensiunii la bornele sarcinii invertorului rezonant de tip paralel ............................................................................................................. 95 Figura 4. 14 Schema invertorului rezonant n semipunte cu sarcin RL ................................ 96 Figura 4. 15 Formele de und obinute n urma simulrii Matlab a invertorului n regim tranzitoriu ................................................................................................................................ 99 Figura 4. 16 Formele de und obinute n urma simulrii Matlab a invertorului n regim permanent................................................................................................................................ 99 Figura 4. 17 Formele de und ale curentului i tensiunii pe sarcin n regim tranzitoriu ..... 100 Figura 4. 18 Formele de und ale curentului i tensiunii pe sarcin n regim permanent .... 100 Figura 4. 19 Schema de simulare a invertorului n programul Simulink .............................. 101 Figura 4. 20 Formele de und ale curentului (jos) i tensiunii (sus) pe sarcin obinute n urma unei simulri Simulink a invertorului .......................................................................... 101 Figura 4. 21 Schema de simulare a invertorului n Orcad Pspice ......................................... 101 Figura 4. 22 Formele de und ale tensiunii (sus) i ale curentului (jos) pe sarcin obinute n urma unei simulri PSpice asupra invertorului ..................................................................... 102 Figura 4. 23 Simularea invertorului rezonant cu sarcin variabil si frecven fix a semnalului PWM de comand. (sus curentul prin sarcin, jos tensiunea pe sarcin) ........... 103 Figura 4. 24 Simularea invertorului rezonant cu sarcin variabil si frecven ajustabil (n funcie de frecvena de rezonan a sarcinii) a semnalului PWM de comand. (sus curentul prin sarcin, jos tensiunea pe sarcin)................................................................................... 104 Figura 4. 25 Schema de principiu a invertorului rezonant n punte ...................................... 105 Figura 4. 26 Schema echivalent a circuitului ...................................................................... 105 Figura 4. 27 Rezultatele simulrii invertorului rezonant n punte cu sarcin R-L-C pentru setul I de valori n regim tranzitoriu de funcionare ............................................................. 112 Figura 4. 28 Rezultatele simulrii invertorului rezonant n punte cu sarcin R-L-C pentru setul I de valori n regim permanent de funcionare ............................................................. 113 Figura 4. 29 Rezultatele simulrii invertorului rezonant n punte cu sarcin R-L-C pentru setul II de valori n regim pemanent de funcionare ............................................................. 114
Universitatea Tehnic din Cluj-Napoca_______________________________________________ Figura 4. 30 Schema de simulare PSpice a invertorului rezonant n punte cu sarcin R-L-C serie ....................................................................................................................................... 115 Figura 4. 31 Rezultatele Pspice obinute n urma simulrii invertorului rezonant n punte n regim permanent; a) pentru setul I de valori cu Tr = 126us ; b) pentru setul II de valori cu Tr = 188,9 us .............................................................................................................................. 115 Figura 4. 32 Rezultatele Matlab obinute pentru comanda asincron Tc<T pentru setul I de valori n regim tranzitoriu ............................................................................................ 116 Figura 4. 33 Rezultatele Matlab obinute pentru comanda asincron Tc<T pentru setul I de valori n regim permanent ............................................................................................ 116 Figura 4. 34 Rezultatele Matlab obinute la simularea invertorului rezonant n punte cu comand asincron Tc>Tr pentru setul I de valori n regim tranzitoriu ............................... 117 Figura 4. 35 Rezultatele Matlab obinute la simularea invertorului rezonant n punte cu comand asincron Tc>Tr pentru setul I de valori n regim permanent ............................... 117 Figura 4. 36 Formele de und n regim permanent pentru setul II de valori cu Tc>T .......... 118 Figura 4. 37 Formele de und n regim permanent pentru setul I de valori cu Tc<T .......... 118 Figura 4. 38 Rezultatele obinute pentru simularea caracteristicilor invertoarelor rezonante n punte pentru un factor de calitate de 2,68 i Tc/Tr = 0,8 ...................................................... 120 Figura 4. 39 Rezultatele obinute pentru simularea caracteristicilor invertoarelor rezonante n punte pentru un factor de calitate de 4,71 i Tc/Tr = 1,2 ...................................................... 120 Figura 4. 40 Schema de principiu a unui invertor rezonant n clas D ................................. 121 Figura 4. 41 Simulare n frecven asupra circuitului rezonant serie paralel n programul Matlab ................................................................................................................................... 123 Figura 4. 42 Rezultatele obinute n urma simulrii invertorului rezonant n regim permanent de funcionare obinute cu platforma Matlab implementat ................................................. 124 Figura 4. 43 Rezultatele obinute n urma simulrii invertorului rezonant n regim tranzitoriu de funcionare obinute cu platforma Matlab implementat ................................................. 125 Figura 4. 44 Schema de simulare PSpice a invertorului rezonant ........................................ 125 Figura 4. 45 Tensiunea pe condensator i curentul prin bobina circuitului rezonant paralel 126 Figura 4. 46 Tensiunea i curentul pe circuitul serie ............................................................ 126
xi
Modelarea convertoarelor n comutaie_______________________________________________ Figura 4. 47 Curentul absorbit de la sursa de alimentare sus, curenii de colector prin tranzistori .............................................................................................................................. 127 Figura 4. 48 Semnalele de comand sus i tensiunea pe condensator i tensiunea colectoremitor pe tranzistor ............................................................................................................... 127 Figura 4. 49 Stand experimental al invertorului rezonant..................................................... 128 Figura 4. 50 Semnalele PWM generate din microcontroller: a) 50kHz, b) 75kHz, c) 100kHz, d) 150kHz.............................................................................................................................. 129 Figura 4. 51 Formele de und pe circuitul rezonant al invertorului alimentat la 30V i comandat la frecvena de rezonan: CH1 Tensiunea msurat cu o sond cu atenuare de 10; CH2 curentul prin bobin msurat cu o sond de 100mv/A. ................................................ 129 Figura 4. 52 Formele de und pe circuitul rezonant al invertorului alimentat la 80V i comandat la frecvena de rezonan: CH1 Tensiunea msurat cu o sond cu atenuare de 10; CH2 curentul prin bobin msurat cu o sond de 100mv/A. ................................................ 130 Figura 4. 53 Semnalele de comand la intrarea optocuploarelor (stnga) i semnalele de comand dup circuitul IR2110 ............................................................................................ 130
Figura 5. 1 Schema bloc a unui sistem de acionare a unui motor de curent continuu ......... 135 Figura 5. 2 Simulare PSpice a redresoarelor monofazate: a) schema de simulare; b) simulare cu R C = 0,1 ; c) simulare cu R C = 1 ; d) simulare cu R C = 10 ....................... 136
Figura 5. 3 Simulare PSpice a convertorului Boost: a) schema de simulare; b) rezultatele obinute pentru curentul de intrare (sus), curentul prin bobin (centru), tensiunea de ieire (jos) [stnga], spectrul curentului de intrare [dreapta] .......................................................... 138 Figura 5. 4 Comparaie ntre componentele spectrale obinute i standard .......................... 139 Figura 5. 5 Schema de principiu a unui convertor Boost cu corecia factorului de putere. .. 140 Figura 5. 6 Schema de principiu a unui preregulator cu controlul valorii medii a curentului i forma de und a curentului prin bobina convertorului Boost ............................................... 141 Figura 5. 7 Schema electric a convertorului Boost cu corecia factorului de putere .......... 145 Figura 5. 8 Schema intern a circuitului integrat UC3854 ................................................... 145 Figura 5. 9 Msurarea curentului prin bobin ....................................................................... 146 Figura 5. 10 Limitarea la supracurent ................................................................................... 146
xii
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 5. 11 Reeaua de feed-back a tensiunii de ieire........................................................ 147 Figura 5. 12 Amplificatorul de eroare pentru controlul tensiunii ......................................... 148 Figura 5. 13 Schema de simulare a amplificatorului de eroare a tensiunii. ......................... 150 Figura 5. 14 Funcia de transfer: a) caracteristica de amplitudine;b) caracteristica de faz . 150 Figura 5. 15 Reeaua de FeedForward .................................................................................. 151 Figura 5. 16 Schema de simulare a reelei feedforward; caracteristica de amplitudine a reelei feedforward ........................................................................................................................... 153 Figura 5. 17 Amplificatorul de eroare a curentului............................................................... 154 Figura 5. 18 Schema de simulare a amplificatorului de curent............................................. 155 Figura 5. 19 Funcia de transfer: a) caracteristica de amplitudine;b) caracteristica de faz 156 Figura 5. 20 Schema de simulare a convertorului boost cu corecia factorului de putere .... 156 Figura 5. 21 Formele de und ale tensiunii aplicat la intrare (stnga) ................................ 157 Figura 5. 22 Detaliu a curentului prin bobin (stnga); spectrul armonicelor curentului de intrare (dreapta)..................................................................................................................... 158 Figura 5. 23 Formele de und ale tensiunii de comand i a tensiunii pe sarcin ................ 158 Figura 5. 30 Comparaie ntre standard i rezultatele simulrii ............................................ 159 Figura 5. 24 Forma de und a tensiunii de intrare Ch1 cu atenuare de 10, forma de und a curentului absorbit de la reea Ch2 cu atenuare de 10, msurat cu o sond de curent 100mV/A (stnga); Forma de und a tensiunii de intrare Ch1 cu atenuare de 10, forma de und a curentului absorbit de la reea Ch2, msurat cu o sond de curent 100mV/A (dreapta) ...... 159 Figura 5. 25 Anvelopa curentului de intrare la 50Hz (stnga); Detaliu a curentului absorbit de la reea (dreapta) ............................................................................................................... 160 Figura 5. 26 Forma de und la ieirea pinului 14 a circuitului integrat. Semnalul dinte de fierstru (stnga); Forma de und n grila tranzistorului. Semnalul PWM de comand (dreapta). ............................................................................................................................... 160 Figura 5. 27 Tensiunea Dren-Surs (stnga); Riplul tensiunii de ieire (dreapta) .............. 160 Figura 5. 29 Stand experimental al convertorului Boost cu corecia factorului de putere.... 161 Figura 5. 28 Formele de und ale unui redresor cu filtru capacitiv cu w=10; stand experimental a unui redresor ................................................................................................. 161
xiii
Modelarea convertoarelor n comutaie_______________________________________________
Figura 5. 31 Topologia unei puni H pentru comanda unui motor de curent continuu......... 163 Figura 5. 32 Schema electric de acionare a motorului de curent continuu cu convertor n punte H de tranzistoare ......................................................................................................... 164 Figura 5. 33 Partea de comand a unui bra a convertorului n punte H............................... 165 Figura 5. 34 Circuitul de protecie la supracurent................................................................. 166 Figura 5. 35 Semnalele PWM de comand a tranzistoarelor din puntea H. a) la ieirea microcontrollerului, b) la ieirea optocuploarelor. Factor de umplere egal. ......................... 166 Figura 5. 36 Semnalele PWM de comand a tranzistoarelor din puntea H. A) la ieirea microcontrollerului, B) la ieirea optocuploarelor. Factor de umplere minim. .................... 166 Figura 5. 37 Semnalele PWM de comand a tranzistoarelor din puntea H. A) la ieirea microcontrollerului, B) la ieirea optocuploarelor. Factor de umplere maxim..................... 167 Figura 5. 38 Semnalele PWM de comand a tranzistoarelor din puntea H la ieirea driverului de comand. Forma de und la ieirea convertorului n punte H msurat cu o sond de tensiune cu atenuare de 10. ................................................................................................... 167 Figura 5. 39 Stand experimental cu invertorul n punte H.................................................... 167
xiv
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Lista tabelelor
Tabel 2. 1 Setul de valori pentru simularea transformatorului ............................................ 10 Tabel 2. 2 Valori obinute n urma simulrii transformatorului........................................... 11 Tabel 2. 3 Sistemele de ecuaii difereniale ce descriu funcionarea redresorului monofazat monoalternan cu sarcin RC paralel pentru nfurrile n faz ale transformatorului. ... 18 Tabel 2. 4 Ecuaiile difereniale de funcionare a redresoarelor monofazate monoalternan cu sarcin RC paralel, pentru nfurrile transformatorului n antifaz ............................. 19 Tabel 2. 5 Seturile de valori luate n considerare pentru simularea circuitelor ................... 19 Tabel 2. 6 Valorile obinute pentru unghiul de conducie i variaia tensiunii de sarcin n urma simulrilor redresoarelor monofazate cu sarcin RC.................................................. 22
Tabel 3. 1 Ecuaiile difereniale i schemele echivalente ale convertorului Buck n intervalele de funcionare..................................................................................................... 42 Tabel 3. 2 Valorile obinute n urma msurtorilor ............................................................. 47 Tabel 3. 3 Ecuaiile difereniale i schemele echivalente ale convertorului Boost n intervalele de funcionare..................................................................................................... 55 Tabel 3. 4 Ecuaiile difereniale i schemele echivalente ale convertorului Buck-Boost n intervalele de funcionare..................................................................................................... 58 Tabel 3. 5 Datele de intrare ale convertorului Buck ............................................................ 60 Tabel 3. 6 Datele de ieire pentru convertorul Buck pe care platforma le returneaz ......... 62 Tabel 3. 7 Datele de intrare ale convertorului Boost ........................................................... 63 Tabel 3. 8 Datele de ieire pentru convertorul Boost pe care platforma le returneaz ........ 65 Tabel 3. 9 Datele de intrare ale convertorului Buck-Boost ................................................. 66 Tabel 3. 10 Datele de ieire pentru convertorul Buck-Boost pe care platforma le returneaz .............................................................................................................................................. 67 Tabel 3. 11 Datele de intrare pentru convertorul Forward................................................... 73 Tabel 3. 12 Valorile obinute n urma simulrii convertorului Forward.............................. 75
xv
Modelarea convertoarelor n comutaie_______________________________________________
Tabel 4. 1 Ecuaiile matematice i schemele echivalente ale invertorului rezonant cu sarcina R-L n cele trei intervale de funcionare .............................................................................. 97 Tabel 4. 2 Seturile de valori de simulare ale invertorului rezonant n punte cu comand sincron .............................................................................................................................. 112 Tabel 4. 4 Valorile obinute n urma simulrilor Matlab pentru invertoarele rezonante n punte cu sarcin R-L-C serie......................................................................................... 119
Tabel 5. 1 Valorile componentelor armonice obinute n urma simulrii redresoarelor cu filtru capacitiv .................................................................................................................... 137 Tabel 5. 2 Valorile componenentelor spectrale ale curentului absorbit de la reea n urma simulrii convertorului Boost din figura 5.5 ...................................................................... 139 Tabel 5. 3 Valorile componentelor spectrale rezultate n urma simulrii convertorului rezultnd un TOTAL HARMONIC DISTORTION = 7.130644E+00 PERCENT .. 158 Tabel 5. 4 Valori msurate asupra convertorului Boost cu corecia factorului de putere .. 162
xvi
Universitatea Tehnic din Cluj-Napoca_______________________________________________
1 Introducere
Circuitele electronice au ptruns n zilele noastre n toate domeniile, unde este nevoie de a msura, comanda sau regla o anumit mrime, dar aplicaiile electronicii au fost mult vreme limitate la tehnici de producere i recepie a semnalelor de frecven radio. Abia dup anii 1950 electronica i-a fcut apariia i n industrie, mai nti la comanda mainilor unelte, a utilajelor de prelucrare i producere a laminatelor ori la comanda motoarelor electrice. Odat ce dispozitivele semiconductare au ptruns tot mai susinut n electronica industrial, n anii 1960, au nceput dezvoltri ale unor sisteme tot mai complexe destinate automatizrii proceselor industriale. n cadrul aceleai evoluii, prin apariia circuitelor integrate pe scar larg, a microprocesoarelor (1970), s-a produs o adevrat revoluie n electronica industrial, ce poate fi considerat ca fiind format din dou subdomenii, electronica de putere i electronica de comand i reglaj. Bazele electronicii de putere, constau n dispozitivele electronice de putere (diode, tranzistoare, tiristoare, IGBT, GTO) care, asociate cu dispozitive de comand, permit realizarea echipamentelor de putere, cunoscute sub numele de convertoare. O clasificare a acestor convertoare se poate realiza pe baza conversiei energiei electrice dintr-o form n alta. Astfel, domeniul actual al electronicii de putere prezint diferite tipuri de convertoare: convertoare de curent alternativ curent alternativ (variatoare de tensiune alternativ, cicloconvertoare), convertoare de curent alternativ curent continuu (redresoare), convertoare de curent continuu curent continuu (stabilizatoare n comutaie cu i fr separare galvanic), convertoare de curent continuu curent alternativ (invertoare). n termeni generali, rolul electronicii de putere este de a procesa i controla fluxul de energie electric de la sursele de tensiune i curent ntr-o form optim circuitului de sarcin. Astfel n orice proces de conversie a energiei, este important obinerea unei pierderi de putere reduse i, implicit, a unui randament ridicat, din cel puin dou motive: costul suplimentar al pierderilor de putere i dificultatea nlturrii cldurii disipate datorit pierderilor de putere. n general, aceste dou obiective nu pot fi ndeplinite de ctre echipamente electronice liniare, impunndu-se, utilizarea convertoarelor n comutaie. Aadar, convertoarele n comutaie continu s creasc n popularitate fiind unul dintre domeniile cu cea mai mare cretere pe piaa echipamentelor electronice de putere, dar problemele care apar n raport cu cererile, performanele i standardele de reglementare impuse acestora suscit un interes deosebit n perspectiva evoluiei lor. Dac sursele liniare sunt caracterizate prin funcionarea n regiunea activ normal a tranzistoarelor de reglaj, tranzistoarele convertoarelor n comutaie funcioneaz n regim ON-OFF, comandate de un semnal PWM (Pulse-width 1
Modelarea convertoarelor n comutaie_______________________________________________
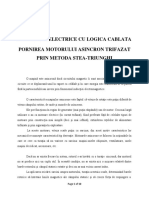
Modulation) cu o frecven n domeniul 20kHz - 400kHz [5][8][11][12][15]. n acest moment se produc convertoare n comutaie ce ofer performane ridicate i ndelinesc cerinele echipamentelor electronice moderne, iar avantajele pe care le au n comparaie cu cele liniare sunt net superioare: randament ridicat de pn la 98%, volum redus datorit frecvenelor mari de comutaie, etc, sunt doar cteva avantaje ce merit amintite. Totodat, evoluia echipamentelor electronice are o tendin de miniaturizare, iar pentru a reui ndeplinirea acestor condiii trebuie s se in cont de faptul c sursa de alimentare, care intr n componena oricrui aparat electronic, trebuie ea nsi s posede aceste caliti. Astfel, convertoarele de tensiune n comutaie se utilizeaz pentru: alimentarea calculatoarelor, echipamentelor de birou, laptop-urilor, echipamentelor de telecomunicaii, ori ca drivere pentru motoarele de curent continuu, etc. Dac n anii 2000 estimrile artau c valoarea echipamentelor electronice de acest tip, tranzacionate pe piaa produselor electronice, se ridica la 3,5-4 miliarde de dolari, ultimele studii realizate asupra acestui aspect indic creteri semnificative a nivelului de vnzri. Un studiu realizat n anul 2011 de ctre Worldwide Market for Power Supplies, este prezentat n figura 1.1.
Figura 1. 1 Evoluia vnzrilor convertoarelor n comutaie. Sursa: The Worldwide Market for Power Supplies
Dei trendul ascendent de vnzri a acestor echipamente, ar indica o eficacitate din punct de vedere a realizrii convertoarelor n comutaie, una din problemele cele mai des ntlnite la mentenana unui aparat electronic o reprezint chiar convertorul n comutaie. Astfel, funcionarea corect a oricrui aparat electronic este asigurat de existena unei surse de alimentare de calitate.
Universitatea Tehnic din Cluj-Napoca_______________________________________________
1.1 Obiectivele tezei
Orice circuit sau aparat electronic, are nevoie pentru funcionare de o surs de alimentare. Pentru a mpiedica apariia unor situaii de necompatibilitate n funcionare, ntre sursa de alimentare i restul echipamentului electronic pe care l deservete, este necesar s se cunoasc principalii parametrii ce caracterizeaz funcionarea corect a oricrui convertor. Astfel, mai multe aspecte trebuie luate n considerare atunci cnd se dorete proiectarea unui convertor n comutaie. Numrul de ieiri orice sistem este prevzut cu una sau mai multe ieiri Curentul maxim debitat - pentru fiecare tensiune de ieire este necesar precizarea gamei de curent pentu care este proiectat sursa Tensiunea de alimentare trebuie precizat tipul sursei primare de energie C.A. sau C.C. precum i limitele de variaie ale tensiunii Riplul tensiunii de ieire Factorul de stabilizare a sursei: S =
U max U min 100% , Umax, Umin reprezint U nom
variaiile tensiunii de ieire fa de tensiunea nominal Unom Randamentul Comportarea n regim dinamic RT = U Dev 100% , unde UDev reprezint deviaia U Nom
maxim a tensiunii de ieire n raport cu valoarea tensiunii nominale Considernd c riplul tensiunii de ieire a unui convertor este prea mare pentru a fi acceptat de sarcina pe care o alimenteaz, reducerea acestuia s-ar putea realiza: fie prin creterea capacitii condensatorului de filtraj, fie prin modificarea topologiei circuitului, fie printr-o modificare a logicii de comand, dar, oricare din aceste aspecte duc la: un pre de cost ridicat, la o creterea de volum i gabarit, ori la o scdere de eficien. Aadar de la reeaua de alimentare electric i pn la consumator o dimensionare greit a convertorului poate duce la distrugerea consumatorului sau la perturbaii produse asupra reelei de alimentare. O modelare corect a acestor tipuri de convertoare poate duce n cele mai multe situaii la o estimare exact a valorilor mrimilor de interes (curent, tensiune), ceea ce duce la o dimensionare corect a componentelor circuitului i la alegerea unui algoritm de control optim. Exist diverse metode de a modela i simula un circuit i totodat diverse pachete de programe care ofer rezultate bune.
Modelarea convertoarelor n comutaie_______________________________________________
Pornind de la cele enunate mai sus, obiectivul principal al acestei teze, este acela de a modela convertoarele n comutaie i de a propune metode noi de simulare i proiectare a acestor convertoare, pe baza modelelor matematice. Se urmrete: Modelarea convertoarelor c.a-c.c Modelarea convertorelor c.c-c.c Modelarea convertoarelor c.c.-c.a. Validri experimentale ale modelelor propuse Implementri ale unor platforme Matlab de simulare i proiectare
Astfel, o analiz corect de modelare a acestor convertoare, trebuie s aib la baz un circuit echivalent, pe care s se scrie un model matematic, o metod de rezolvare numeric, o implementare a algoritmului ntr-un limbaj de programare i simulare i o interpretare a rezultatelor, care ar trebui s duc n majoritatea cazurilor la mbuntirea modelului propus. Etapele procesului de modelare a convertoarelor n comutaie sunt prezentate n figura urmtoare:
Figura 1. 2 Organigrama de lucru
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 1.2 ilustreaz principiul ce st la baza modelrii propuse, asupra convertoarelor. Se studiaz i se modeleaz tipurile de convertoare c.a.-c.c., c.c.-c.c., c.c.-a.c., iar rezultatele obinute n urma implementrii n Matlab a modelelor matematice, n vederea obinerii unor platforme de simulare i proiectare a convertoarelor, sunt comparate cu simulri realizate asupra acestor convertoare cu pachete de programe specializate, ori cu rezultate obinute prin msurtori efectuate pe platforme experimentale realizate.
1.2 Structura tezei
Urmrind s cuprindem un domeniu ct mai larg de convertoare n comutaie, aceast lucrare este structurat pe ase capitole ce urmresc modelarea, simularea i implementarea acestor convertoare. Capitol doi prezint un model matematic al transformatorului electric, folosit n convertoarele n comutaie. Validarea acestui model se realizeaz prin platforme Matlab de simulare a redresoarelor monofazate ce au n componena lor un astfel de element de circuit. Astfel, un studiu asupra redresoarelor monofazate n funcie de tipul sarcinii de la ieirea lor este de asemenea realizat. Platformele Matlab de simulare a acestor convertoare urmresc diferite topologii ale redresoarelor monofazate, precum i funcionarea acestora din punct de vedere a sarcinii conectate la ieirea acestora. Este prezentat de asemenea o reprezentare a caracteristicilor redresoarelor. Platformele Matlab implementate, sunt validate prin simulri PSpice i prin implementri practice. Compararea rezultatelor obinute se realizeaz printr-o platform Matlab de achiziie de date. n capitolul trei se prezint modelarea convertoarelor c.c.-c.c. n comutaie. Pornind de la regimurile de funcionare, regim de curent nentrerupt i regim de curent ntrerupt a convertoarelor cu i fr separare galvanic, acestea sunt modelate i simulate cu ajutorul unor platforme Matlab de proiectare. Totodat capitolul trei prezint implementarea practic a convertorului Buck n bucl nchis n vederea validrii unei platforme Matlab, de simulare a acestui convertor n aceleai condiii. O analiz n regim static de funcionare a convertorului Boost este prezentat n detaliu, iar modelele matematice ale convertoarelor cu separare galvanic de tip Forward i Flyback sunt prezentate sub forma unor platforme Matlab. Capitolul patru prezint o analiz asupra convertoarelor c.c.-c.a.. Pornind de la invertoarele cu und dreptunghiular la ieire, unde se evideniaz diferite tipuri de comand, se trece la modelarea invertoarelor cu circuit rezonant. Platformele Matlab de simulare a invertoarelor rezonante sunt prezentate pe larg, precum i metodele de comand ale acestor invertoare rezonante. 5
Modelarea convertoarelor n comutaie_______________________________________________
Sunt analizate invertoare n topologie semipunte i punte de tranzistoare, iar platformele Matlab implementate urmresc funcionalitatea acestora din punct de vedere al modului de comand. Astfel se prezint particulariti ale comenzii de tip sincron cu trecerile curentului prin zero, ori a comenzii asincrone. Sunt prezentate comparaii ale acestor metode de control din punct de vedere al puterii transmise sarcinii. O platform Matlab ce returneaz caracteristicile de tensiune i curent ale acestor invertoare este prezentat, iar validarea rezultatelor obinute analitic se realizeaz prin simulri Pspice i prin rezultate experimentale obinute n urma implementrii unui invertor rezonant n clas D, cu sarcin serie-paralel. Capitolul cinci prezint implementarea practic a unui circuit cu corecia factorului de putere, n vederea simulrii unui sistem format din redresor-convertor boost cu corecia factorului de putere - convertor n punte H. n urma studierii standardelor de reglementare n vigoare cu privire la armonicile de curent i a diferitelor metode de control a factorului de putere, se propune implementarea practic a convertorului Boost, cu circuit de control a factorului de putere prin metoda controlului valorii medii a curentului. Se prezint o analiz detaliat de proiectare, precum i un studiu comparativ ntre valorile obinute n urma simulrii, implementrii practice i a standardului de reglementare. Capitolul ase este dedicat concluziilor, evalurii metodelor de modelare a convertoarelor n comutaie i a implementrii acestora, precum i ilustrrii contribuiilor personale aduse de autor.
Universitatea Tehnic din Cluj-Napoca_______________________________________________
2 Capitolul II. Analiza, modelarea matematic, simularea i implementarea convertoarelor c.a.-c.c.
2.1 Clasificare i ipoteze de studiu
Majoritatea circuitelor electrice se alimenteaz de la una sau mai multe surse de alimentare n curent continuu. De cele mai multe ori, tensiunea continu se obine prin conversia tensiunii alternative din reeaua de distribuie cu frecvena de 50Hz. Aceast conversie se realizeaz cu ajutorul convertoarelor c.a-c.c., care sunt circuite de redresare. O schem bloc a unui circuit de alimentare n curent continuu care se compune dintr-un transformator, un redresor, un filtru i un stabilizator este prezentat n figura urmtoare. [1][2]
Figura 2. 1 Schema de principiu a unui sistem de alimentare n curent continuu alimentat de la reeaua de tensiune alternativ.
Transformatorul (T), are rolul de a separa consumatorul (C), de reeaua de alimentare de curent alternativ i de a modifica tensiunea reelei (220Vef/50Hz) la o valoare mai mare sau mai mic, necesar pentru a obine tensiunea continu dorit la bornele consumatorului. Redresorul (R), este un circuit care realizeaz conversia unei tensiuni alternative (mono sau polifazat) ntr-o tensiune care are o component continu diferit de zero i care pe lng aceasta are o component variabil numit ondulaie, sensul conversiei fiind dinspre partea de curent alternativ spre partea de curent continuu. Astfel putem spune c aceste redresoare prezint cel puin un element neliniar care permite conducia curentului numai ntr-un singur sens. Filtrul de netezire (F), are rolul de a extrage componenta continu i de a atenua ct mai mult pulsaiile (ondulaiile) tensiunii redresate, iar stabilizatorul (S), are rolul de a furniza tensiunea la bornele consumatorului ct mai stabil, astfel putem spune c tensiunea la ieirea stabilizatorului este independent de variaiile tensiunii de intrare, a sarcinii i temperaturii i de a menine tensiunea pe sarcin ntre anumite limite determinate de funcionarea corect a circuitului. Clasificarea redresoarelor se poate face dup urmtoarele criterii [1][2][3].: dup tensiunea alternativ de alimentare: redresoare monofazate
Modelarea convertoarelor n comutaie_______________________________________________
redresoare trifazate dup modul n care poate fi controlat tensiunea continu de ieire redresoare necomandate (nu conin dect diode) redresoare semicomandate (cu tiristoare i diode) redresoare comandate (cu tiristoare) n continuare se prezint studiul asupra redresoarelor monofazate pornind de la urmtoarele ipoteze: rezistenele, capacitile, inductivitile sunt liniare i egale pe fazele redresorului; curentul de magnetizare al transformatorului i pierderile la mers n gol sunt neglijabile; reeaua de alimentare are o putere de scurtcircuit infinit, deci o impedan nul (Z=0); dispozitivele semiconductoare de putere au o caracteristic ideal.
2.2 Transformatorul
Transformatorul electric este un ansamblu de dou sau mai multe bobine cuplate inductiv foarte strns (coeficientul de cuplaj k 1), ntre care se poate realiza, n curent alternativ, un transfer de putere cu randament apropiat de unitate. Pentru obinerea cuplajului magnetic foarte strns, nfurrile transformatorului sunt bobinate, pe un miez magnetic care are rolul de a concentra liniile de cmp[5]. Deoarece prezena unui transformator se impune n realizarea unui redresor sau convertor n comutaie, s-a implementat o platform Matlab pentru analiza acestor transformatoare. Modelul matematic este realizat pe baza circuitului din figura 2.2 b), unde cu Lp i Ls s-au notat inductanele totale din primarul i secundarul transformatorului. Analiza transformatorului este necesar i din punct de vedere a comportrii acestuia la diferite frecvene, innd seama de comportamentul su de tip filtru trece band n frecven. Astfel, ecuaiile matematice n timp ce se pot scrie n timpul funcionrii transformatorului, sunt date de relaiile urmtoare [8].
Universitatea Tehnic din Cluj-Napoca_______________________________________________
a)
b)
Figura 2. 2 a) transformator ideal; b) schema transformatorului pentru analiza n timp a funcionrii
di p di p di di M s Lp M s = e Rp i p e = R p i p + L p dt dt dt dt di p di p di di 0 = M Rs is Ls s R is M Ls s = is ( Rs + R ) dt dt dt dt
(2.1)
,unde e este tensiunea alternativ aplicat n primarul transformatorului, iar M = k Lp Ls reprezint inductana mutual format ntre primarul i secundarul transformatorului. Din relaia (2.1) rezult un sistem de dou ecuaii difereniale rezolvate.
di p dis , , ce trebuie dt dt
Lp M
M Ls
= Lp Ls + M 2
(2.2)
Rezultnd astfel din relaiile (2.1) i (2.2):
p =
e Rp ip
( Rs + R) is
M Ls
= Ls (e R p i p ) + M ( Rs + R) is
(2.3)
s =
Lp M
e Rp i p
( Rs + R) is
= L1 ( Rs + R) is M (e R p i p )
(2.4)
Pornind de la ecuaiile descrise anterior i considernd parametrii transformatorului ca cei din tabelul 2.1 (parametri prelevai prin msurtori asupra unor transformatoare), s-a trecut la o simulare a transformatorului cu ajutorul platformei Matlab implementat.
Modelarea convertoarelor n comutaie_______________________________________________
Tabel 2. 1 Setul de valori pentru simularea transformatorului
Parametrii Tensiunea de alimentare, e [Vef]
Set 1 de valori 220 50 155 1,55 2 0,012 100
400V
Set 2 de valori 50 50000 0,04 0,02 4e-6 2e-6 1
Frecvena tensiunii din primar [Hz] Rezistena primarului, Rp Rezistena secundarului, Rs Inductana primarului, Lp Inductana secundarului, Ls Rezistena de sarcin, R [ ] [ ] [H] [H] []
0V
-400V V(TX1:3) 1.0A V(Rp:1)
0A
SEL>> -1.0A 0s -I(R3)
20ms I(Rp)
40ms Time
60ms
80ms
100ms
a)
b)
Figura 2. 3 Rezutatele simulrii unui transformator cu platforma Matlab implementat a), rezultatele obinute pentru validarea platformei cu simulatorul PSpice b), pentru setul 1 de valori
10
Universitatea Tehnic din Cluj-Napoca_______________________________________________
50V
0V
-50V V(Rp:1) 100A V(TX1:3)
0A
SEL>> -100A 0s -I(R3)*10
20us I(Rp)
40us Time
60us
80us
100us
a)
b)
Figura 2. 4 Rezultatele simulrii obinute pentru setul 2 de valori a) platform Matlab, b) simulatorul PSpice, cu meniunea c, curentul din secundar a fost multiplicat de 10 ori n ambele simulri
n figurile 2.3 a) i 2.4 a) este prezentat platforma Matlab implementat pentru simularea transformatoarelor. Aa cum se poate observa platforma calculeaz amplitudinea maxim a tensiunii din secundar, raportul numrului de spire, precum i inductana mutual ce apare ntre primarul i secundarul transformatorului. Seturile de valori au fost alese astfel nct simularea transformatorului s fie realizat att la frecvena reelei de alimentare, ct i la o frecven de ordinul kHz, n vederea validrii modelului de transformator pentru convertoarele c.c-c.c.. Pentru a valida rezultatele obinute cu platforma implementat, s-a trecut la o simulare a transformatorului, pentru cele dou seturi de valori, n programul specializat PSpice. Comparnd rezultatele obinute n urma simulrilor, se poate spune c rezultatele obinute n urma simulrii transformatorului cu platforma Matlab implementat sunt satisfctoare n raport cu rezultatele obinute cu simulatorul specializat PSpice.
Tabel 2. 2 Valori obinute n urma simulrii transformatorului
Simulare Matlab Set 1 de valori Set 2 de valori
Simulare PSpice Set 1 de valori Set 2 de valori
umax = 24.01V i1max = 0.5 A i2max = 0.25 A
umax = 35.35V i1max = 55.5 A i2max = 3.56 A
umax = 24V i1max = 0.42 A i2max = 0.21A
umax = 35V i1max = 54.3 A i2max = 3.5 A
Pornind de la modelul transformatorului prezentat anterior s-a trecut la implementarea unor platforme Matlab de simulare a redresoarelor monofazate n vederea validrii acestui model ce urmeaz a fi integrat n simulrile convertoarelor cu separare galvanic.
11
Modelarea convertoarelor n comutaie_______________________________________________
2.3 Redresoare monofazate monoalternan
Aceste redresoare sunt caracterizate prin prezena unui singur dispozitiv semiconductor iar funcionarea acestora este legat de natura sarcinii conectate la ieire. n continuare se prezint un studiu asupra acestor redresoare monofazate monoalternan cu diferite tipuri de sarcin lund n considerare modelul transformatorului prezentat anterior.
2.3.1 Redresoare monofazate monoalternan cu sarcin rezistiv
Schema de principiu a unui redresor monofazat monoalternan cu sarcin rezistiv se prezint n figura 2.5, unde cu R1 i L1 s-a notat rezistena i inductana primarului, cu R2 i L2 s-a notat rezistena i inductana secundarului, iar cu M inductana mutual ce apare ntre nfurrile transformatorului. [1][8][9]
Figura 2. 5 Schema unui redresor monofazat monoalternan cu sarcin rezistiv
Dac aplicm n primarul transformatorului tensiunea e = Emax sin(t ) , atunci tensiunea din secundar este dat de relaia: e2 (t ) = E 2 max sin(t ) = 2 E 2 ef sin(t ) . Raportul celor dou
amplitudini fiind egal cu raportul de transformare dat de relaia: n1 Emax , unde n1 reprezint = n2 E2max
numrul de spire al nfurrii primare, iar n2 reprezint numrul de spire al nfurrii secundare. Dac ne raportm la valoarea inductanelor transformatorului, raportul numrului de spire este dat de:
ns = n1 = n2 L1 L2
(2.5)
Pentru a simplifica analiza redresorului, caracteristica neliniara a diodei se aproximeaz liniar pe poriuni, dioda nlocuindu-se cu o rezisten echivalent Rd. n semialternana pozitiv
12
Universitatea Tehnic din Cluj-Napoca_______________________________________________
dioda conduce lsnd s treac un curent iD, care produce o cdere de tensiune us(t) la bornele sarcinii. Astfel curentul prin sarcin are expresia:
is (t ) =
E e2 (t ) = 2max sin(t ) Ri + R Ri + R
(2.6)
unde, Ri reprezint rezistena total de pierderi i este dat de relaia:
L Ri = R2 + R1 2 + Rd L1
2
(2.7)
Putem defini ntr-un mod analic curentul prin sarcin astfel:
is (t ) = I s max sin(t ) , pentru 0 E , I s max = 2max Ri + Rs is (t ) = 0, pentru 2
(2.8)
iar, tensiunea la bornele sarcinii este us (t ) = Rs is (t ) . Astfel, putem descrie tensiunea la bornele sarcinii n funcie de conducia diodei ca fiind: us (t ) = U s max sin(t ) , pentru 0 2 R , U 2max = E2max Ri + Rs us (t ) = 0, pentru 2 (2.9)
Dac aplicm relaia de definiie a valorii medii, putem determina valoarea tensiunii continue redresate la bornele sarcinii ca n relaia (2.10).
U s = U smed
1 = us (t )d (t ) T 0 (2.10)
Us =
U max U max Us 1 U smed sin(t )dt = 2s ( cos t ) |0 = 2s 2 = max 2 0 U s max
U s = U smed =
Rs E 2max Ri + Rs
n mod similar valoarea medie a curentului rezult: I s = I smed = Us E I 1 = U s max ( RS ) = 2max = s max RS Ri + RS (2.11)
Tensiunea alternativa e2 din secundarul transformatorului (de componenta medie nul) este convertit ntr-o tensiune pulsatorie (are componenta continu nenul) prin operaia de redresare. Astfel, valoare efectiv a curentului total prin sarcin este dat de :
13
Modelarea convertoarelor n comutaie_______________________________________________
1 = T
2
I sef
I
0
2 s max
sin 2 (t ) I sef =
I s max 2
, U sef =
U s max 2
(2.12)
n cazul acestor redresoare monofazate monoalternan, a cror sarcin este pur rezistiv, unghiul de conducie al diodei este de 1800. Astfel, alternana pozitiv din secundarul transformatorului se regsete la bornele sarcinii, iar n alternana negativ dioda este blocat. Relaiile de calcul prezentate mai sus vor fi utilizate la implementarea platformei Matlab.
2.3.2 Redresoare monofazate monoalternan cu sarcin rezistiv capacitiv.
n majoritatea aplicaiilor se cere ca factorul de ondulaie a tensiunii pe sarcin s nu fie mai mare de cteva procente. Deoarece la redresoarele cu sarcin pur rezistiv, tensiunea pe sarcin are o component important de curent alternativ suprapus peste componenta util de curent continuu, pentru multe aplicaii se impune folosirea unor filtre. Schema de principiu a unui redresor monofazat monoalternan cu sarcin RC este prezentat n figura 2.6. [8][9]
Figura 2. 6 Schema de principiu a redresorului monofazat monoalternana cu sarcin RC
Condensatorul C se ncarc n intervalele de conducie ale diodei adic [1 + 2k , 2 + 2 ]
i se descarc pe rezistena de sarcin n intervalele n care dioda este blocat, adic [ 2 + 2k , 1 + 2(k + 1) ] , unde 1 este momentul n care dioada ncepe conducia, iar 2 momentul n care dioda se blocheaz. Astfel, dac constanta de timp de descrcare a condensatorului = R C , este mult mai mare dect perioada determinat de frecvena reelei atunci condensatorul se descarc foarte puin n timpul unei perioade, iar tensiunea la bornele sale poate fi considerat aproximativ constant. Dac redresorul lucrez n gol ( Rs ) atunci condensatorul se ncarc la valoarea E2 max . Aceast tensiune se pastreaz constant deoarece dioda rmne mereu blocat i condensatorul nu se mai descarc. O particularitate important a redresorului cu filtru RC este aceea c dioda este parcurs de vrfuri mari de curent. Analiza redresorului cu filtru RC este dificil, datorit caracteristicii neliniare a diodei. Pentru simplificarea
14
Universitatea Tehnic din Cluj-Napoca_______________________________________________
calculelor i pentru a scoate n eviden particularitile introduse de capacitatea de filtraj n continuare se neglijeaz rezistena intern a diodei i a transformatorului. n intervalul de timp [1 , 2 ] n care dioda conduce tensiunea pe sarcin este egal cu tensiunea indus n secundar. Astfel, putem scrie tensiunea i curentul n acest interval ca fiind:
us (t ) = e2 (t ) = E2max sin( t ) is (t ) = E2max sin( t ) Rs (2.13)
Curentul ce strbate dioda n acest interval este o sum a curenilor prin condensator i sarcin i este dat de:
iD (t ) = iC (t ) + iS (t ) =
C duc (t ) E2max E + sin( t ) = 2max (sin t + Rs C cos t ) dt Rs Rs
(2.14)
Dac notm tg = Rs C , unde = arctg ( Rs C ) putem rescrie curentul prin diod ca fiind: iD (t ) = E2max 1 + ( Rs C ) 2 sin(t + ) Rs (2.15)
Astfel pentru t = 2 curentul prin diod este nul, iar 2 se calculeaz cu relaia:
2 = arctg ( Rs C )
(2.16)
n intervalul ( 2 , 1 + 2 ) condensatorul se descarc prin rezistena de sarcin, tensiunea pe aceasta scznd exponenial cu constanta de timp , avnd expresia matematic de forma celei din relaia (2.17). t us (t ) = A exp Rs C
(2.17)
unde, A este o constant, iar la momentul t2=2 deoarece tensiunea la bornele condensatorului este o funcie continu rezult:
t 2 us (t ) = E2 max sin 2 exp , Rs C 2 A exp = E2 max sin 2 Rs C
(2.18)
Deoarece n acest interval ic (t ) = is (t ) , putem determina unghiul 1 cu relaiile:
2 + 1 2 2 1 2 E2 max sin 1 = E2 max sin 2 exp sin 1 = sin 2 exp Rs C Rs C (2.19)
15
Modelarea convertoarelor n comutaie_______________________________________________
n figura 2.7 a) se prezint formele de und caracteristice unui redresor monofazat monoalternan cu sarcin RC paralel, unde se evideniaz unghiurile 1 i 2 , precum i unghiul de conducie al diodei: c = 2 1 n momentul funcionrii, iar n figura 2.8 b) sunt reprezentate grafic variaiile unghiurilor 1, 2, n funcie de R C , variaia normalizat a curentului Is/E/R i variaia n funcie de R C a tensiunii pe sarcin fa de tensiunea din primarul transformatorului. Aceste rezultate au fost obinute printr-o simulare Matlab pe baza ecuaiilor prezentate anterior.
a)
b)
Figura 2. 7 a) Formele de und caracteristice ale unui redresor monofazat monoalternan cu sarcin RC paralel, plot 1 curent primar, curent secundar, plot 2 tensiune primar, plot 3 tensiunea secundar, tensiunea de sarcin; b) variaiile 1 i 2 n funcie de R C plot 1, variaia curentului plot 2 i variaia tensiunii plot 3
2.3.3 Modelul matematic realizat pentru simularea redresoarelor monoalternan
Pornind de la schemele prezentate n figurile 2.5 i 2.6, n continuare se va prezenta analiza matematic a acestor redresoare prin sisteme de ecuaii difereniale care vor fi introduse n programul Matlab n scopul simulrii acestor redresoare. Ipotezele de plecare n analiza acestor circuite au la baz funcionarea diodei care a fost modelat prin trei metode diferite. n primul caz s-a considerat o diod ce prezint o rezisten de ordinul m n conducie i ideal la blocare, n cazul al doilea aceast diod a fost modelat avnd aceeai caracteristic ca n primul caz pentru conducie dar o rezisten de ordinul M la blocare, iar n cazul trei dioda este modelat avnd o tensiune de prag de 0,6-0,7 V n cadranul I restul caracteristicilor din modelul doi ramnnd la fel. Tot ca o ipotez s-a luat n considerare i modelul transformatorului, considernd acest element ca avnd nfurrile n faz sau antifaz. 16
Universitatea Tehnic din Cluj-Napoca_______________________________________________
a)
b)
c)
Figura 2. 8 Modelele diodei folosite n ipotezele analizei matematice
Dac ne raportm la figura 2.6 sistemul de ecuaii matematice ce se pot scrie n urma funcionrii circuitului este dat de:
di1 di2 e = R1 i1 + L1 dt M dt di1 di ( R2 + RD )i2 L2 2 0 = M dt dt u du u i2 = ic + R = C dt + R
(2.20)
Rezolvnd ecuaia (2.20), unde cu RD s-a notat rezistena diodei, rezult un sistem de trei ecuaii difereniale
di1 di2 du , , , ce trebuie rezolvate, n vederea determinrii soluiilor de interes. dt dt dt
di2 di1 L1 dt M dt = e R1 i1 M di1 L di2 = u + ( R + R ) i D 2 2 2 dt dt L M = 1 = L1 L2 + M 2 M L2 1 = 2 = e R1 i1 L1 e R1 i1 M u + ( R2 + RD ) i2 M L2 u + ( R2 + RD ) i2 = L2 (e R1 i1 ) + M [u + ( R2 + RD ) i2 ] = L1 [u + ( R2 + RD ) i2 ] M (e R1 i1 ) (2.21)
e = E sin t Astfel pentru cele trei modele, din ipotezele prezentate anterior pentru modelarea diodei, s-au obinut urmtoarele sisteme de ecuaii difereniale, ce urmeaz a fi implementate n Matlab, n ipoteza nfurrilor n faz ale transformatorului.
17
Modelarea convertoarelor n comutaie_______________________________________________
Tabel 2. 3 Sistemele de ecuaii difereniale ce descriu funcionarea redresorului monofazat monoalternan cu sarcin RC paralel pentru nfurrile n faz ale transformatorului.
Dioda n conducie Model I
Dioda blocat
di1 L2 (e R1 i1 ) M (( R2 + Rd ) i2 + u ) dt = di2 L1 (( R2 + Rd ) i2 + u ) + M (e R1 i1 ) = dt u du i2 R = C dt
Model II
di1 e R1 i1 dt = L1 di2 =0 dt u du dt = R C
di1 L2 (e R1 i1 ) M (( R2 + Rd ) i2 + u ) dt = di2 L1 (( R2 + Rd ) i2 + u ) + M (e R1 i1 ) = dt u du i2 R = C dt
di1 = e R1i1 dt L1 di2 L1 (( R2 + Rd B ) i2 + u ) + M (e R1i1 ) = dt u du i2 R = C dt
Model III
di1 L2 (e R1 i1 ) M (( R2 + Rd ) i2 + u ) dt = di2 L1 (( R2 + Rd ) i2 + u ) + M (e R1 i1 ) = dt u du i2 R = C dt
di1 L2 (e R1 i1 ) M (( R2 + RdB ) i2 + u + ud ) dt = di2 L1 (( R2 + RdB ) i2 + u + ud ) + M (e R1 i1 ) = dt u du i2 R = C dt
e R1 i1 L1
Tensiunea n secundar este dat de: u21 = M
Pentru modelarea redresoarelor monofazate cu sarcin RC, cu nfurrile transformatorului n antifaz, sistemele de ecuaii difereniale ce descriu funcionarea redresoarelor, se deduc n mod analog cu cele prezentate n tabelul 2.2. Sistemul de ecuaii
18
Universitatea Tehnic din Cluj-Napoca_______________________________________________
difereniale pentru modelul I al diodei pentru un redresor cu nfurrile n antifaz este dat n tabelul 2.4.
Tabel 2. 4 Ecuaiile difereniale de funcionare a redresoarelor monofazate monoalternan cu sarcin RC paralel, pentru nfurrile transformatorului n antifaz
Dioda n conducie
Dioda blocat
di1 e R1i1 dt = L 1 di2 =0 dt du u dt = RC e R1 i1 L1
di1 L2 (e R1i1 ) + M (( R2 + Rd )i2 + u ) dt = di2 L1 (( R2 + Rd ) i2 + u ) + M (e R1i1 ) = dt u du i2 R = C dt
Tensiunea n secundar este dat de: u21 = M
n urma stabilirii modelului matematic diferenial, a acestor redresoare, s-a trecut la implementarea unei platforme Matlab pentru simularea circuitelor analizate. Rezultatele obinute n urma utilizrii platformei Matlab sunt prezentate n figurile urmtoare, iar ca o paralel acestea sunt comparate cu rezultatele obinute n urma simulrilor cu software-ul specializat PSpice. Datele de simulare sunt prezentate n tabelul 2.5, menionnd c simulrile Matlab i PSpice au fost realizate n aceleai condiii.
Tabel 2. 5 Seturile de valori luate n considerare pentru simularea circuitelor
Sarcina R
Tensiune de intrare E [V] Frecvena tensiunii f [Hz] Lp [H] Ls [H] Rp [ ] Rs [ ] R [ ] C [F] Rd [ ] Ud [V]
RC Set 2 20 50000 4e-6 2e-6 0,4 0,2 10 0,5 0,6 Set 1 220 50 2 0,012 155 1,55 100 22e-6 0,9 0,6 Set 2 20 50000 4e-6 2e-6 0,4 0,2 100 25e-6 0,5 0,6
Set 1 220 50 2 0,012 155 1,55 10 0,9 0,6
19
Modelarea convertoarelor n comutaie_______________________________________________
a) b) Figura 2. 9 Rezultate obinute n urma simulrii cu platforma Matlab pentru un redresor monoalternan cu sarcin rezistiv i nfurrile transformatorului n faz. a) setul 1 de valori, b) setul 2 de valori
2.0A
0A
-2.0A I(R4) 400V I(R5)
0V
-400V V(V2:+) 20V 10V SEL>> 0V 0s V(D5:2) Time V(TX2:3)*5
10ms
20ms
30ms
40ms
50ms
60ms
a)
b)
Figura 2. 10 Rezultate obinute n urma simulrii cu platforma Matlab pentru un redresor monoalternan cu sarcin RC paralel i nfurrile transformatorului n faz. a), i b) simulare Pspice pentru setul 1 de valori.
a)
b)
Figura 2. 11 Setul 2 de valori pentru redresoarele monofazate monoalternan a) n faz, b) n antifaz
20
Universitatea Tehnic din Cluj-Napoca_______________________________________________
1.0A 0A -1.0A I(R7) 400V 0V -400V V(R7:1) 20V 10V SEL>> 0V 540ms 550ms V(R9:1) V(R8:1)*5 I(R8)
560ms
570ms Time
580ms
590ms
600ms
a)
b)
Figura 2. 12 Rezultate obinute pentru setul 1 de valori cu nfurrile transformatorului n antifaz a) platforma Matlab, b) simulare PSpice, cu meniunea c tensiunea din secundar este multiplicat de 5 ori
Figurile anterioare prezint rezultatele obinute n urma simulrii redresoarelor monoalternan monofazate cu platforma Matlab implementat. Acest platform permite utilizatorului introducerea valorilor elementelor de circuit i returneaz formele de und caracteristice curenilor din primarul i secundarul transformatorului, tensiunilor din primar i secundar, precum i tensiunii pe sarcin. Din caseta Transformator utilizatorului i se permite introducerea valorilor unui transformator iar parametrii circuitului pot fi modificai din caseta Parametri circuit. Formele de und pe care platforma Matlab le returneaz, pot fi vizualizate att n regim permanent ct i n regim tranzitoriu de funcionare. Unghiul de conducie al diodei, precum i riplul tensiunii de la ieire, ori valoarea inductanei mutuale a transformatorului sunt returnate de platform, astfel nct utilizatorul s aib un rezultat clar asupra funcionrii circuitului. Din meniul platformei, utilizatorul poate selecta tipul de circuit dorit, precum i tipul de transformator cu care s se realizeze simularea, cu nfurri n faz sau n antifaz. Pentru verificarea rezultatelor obinute prin simularea acestor circuite cu platforma Matlab implementat pe baza ecuaiilor matematice, s-au realizat simulri PSpice i o serie de msurtori experimentale asupra acestor circuite. Rezultatele experimentale sunt prezentate n figurile urmtoare, cu meniunea c valorile de simulare pentru setul unu, sunt identice cu valorile circuitului implementat practic. Astfel pentru vizualizarea i interpretarea rezultatelor din aceeai platform matlab de simulare a redresoarelor, se permite deschiderea unor fiiere de date achiziionate cu ajutorul unui osciloscop Tektronics.[7][12]
21
Modelarea convertoarelor n comutaie_______________________________________________
a)
b)
Figura 2. 13 Rezultate experimentale obinute n urma achiziiei semnalelor de pe osciloscop i prelucrate n platforma Matlab. a) redresor monofazat cu sarcin RC paralel n faz, b) redresor monofazat cu sarcin RC paralel n antifaz
Figura 2.13 prezint o platforma Matlab de achiziie de date i reprezentare grafic a valorilor. Cu ajutorul osciloscopului s-au achiziionat datele corespunztoare formelor de und vizualizate, acestea fiind prelucrate n programul Matlab i reprezentate grafic n vederea comparrii rezultatelor. O comparaie a valorilor obinute n urma simulrii Matlab, PSpice i a msurtorilor experimentale, asupra variaiei tensiunii de sarcin i unghiului de conducie este prezentat n tabelul 2.6.
Tabel 2. 6 Valorile obinute pentru unghiul de conducie i variaia tensiunii de sarcin n urma simulrilor redresoarelor monofazate cu sarcin RC
Metoda utilizat Tipul Matlab PSpice Experimental
c [ ]
Faz Antifaz 81.80 78.84
u [V]
8.66 8.97
c [ ]
81 80
u [V]
8.7 8.8
c [0]
87 85
u [V]
10.4 10.4
2.3.4 Redresoare monofazate monoalternan cu sarcin rezistiv inductiv
Schema de principiu a unui astfel de redresor este prezentat n figura 2.14, unde cu Us s-a notat tensiunea din secundarul transformatorului, cu Ud tensiunea redresat dup diod iar cu UL i UR s-a notat tensiunea pe bobin i pe rezisten.[1]
22
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 2. 14 Schema de principiu a unui redresor monofazat monoalternan cu sarcin RL
Considernd dioda D ideal i n conducie i aplicnd teorema lui Kirchoff se obine: Us = Ud = UL +UR = L did + R id dt (2.22)
tiind c tensiunea la bornele secundarului are o form sinusoidal U s sin(t ) , atunci soluia ecuaiei difereniale este de forma:
id (t ) = i f (t ) + il (t )
(2.23)
unde, if este o component forat ce are forma tensiunii de alimentare i poate fi exprimat ca fiind: i f (t ) = I f 2 sin(t ) = unde, Z = R 2 + ( L) 2 i = arctan
fiind:
il (t ) = A e
R
Us sin(t ) Z
(2.24)
L
R
; iar componenta liber il a curentului id se poate scrie ca
(t )
(2.25)
unde, A este o constant a crei valoare rezult din condiiile iniiale la momentul t=0, deoarece n acest moment tensiunea Us i curentul id au valori nule. Dac nlocuim n relaia (2.23) premisele prezentate anterior atunci: id (0) = i f (0) + il (0) il (0) = i f (0) A = Us sin Z (2.26)
Rescriind ecuaia (2.25) i nlocuind valoarea constantei A obinut n urma relaiei (2.26), atunci componenta liber a curentului prin sarcina rezistiv inductiv se poate scrie ca fiind:
U ( t ) il (t ) = s sin e L Z Din relaiile (2.24) i (2.27), relaia (2.23) devine:
R
(2.27)
23
Modelarea convertoarelor n comutaie_______________________________________________
Us Z
R ( t ) sin(t ) + e L sin
id (t ) =
(2.28)
Unghiul de conducie c al diodei se poate exprima din urmtoarea relaie dac se consider c la momentul c = (t ) curentul id este nul:
R c id ( c = t ) = 0 sin( c ) + e L sin = 0 L = arctan = arctan = , R = 0 R 2
(2.29)
Ecuaia (2.29) se poate rezolva prin metode numerice, rezultnd astfel o dependen a unghiului de conducie c a diodei n funcie de termenul
L
R
Dac inductana este egal cu zero, atunci unghiul de conducie este ca n cazul redresoarelor cu sarcin pur rezistiv, 1800. Dac sarcina se comport pur inductiv, rezistena dispare, iar termenul
L
R
tinde la infinit, ceea ce duce la o conducie permanent a diodei, unghiul
c avnd valoare de 3600. n acest caz putem scrie curentul prin sarcin ca fiind:
id (t ) = Us (1 cos t ) Z
(2.30)
Raportndu-ne strict la natura sarcinii rezistiv inductive, atunci unghiul de conducie c este n intervalul [1800,3600], ceea ce ne arat c trecerea curentului prin diod este prelungit dup alternana redresat, adic dup schimbarea de semn a tensiunii din secundarul transformatorului. Cauza producerii acestui fenomen are la baz energia acumulat de ctre inductan pe intervalul de conducie a diodei. Pentru simularea acestor redresoare s-a implementat o platform Matlab care permite vizualizarea formelor de und caracteristice circuitului, precum tensiunea i curentul prin sarcin, permind modificarea valorilor componentelor n orice moment de simulare. Rezultatele obinute se prezint n figurile urmtoare.
24
Universitatea Tehnic din Cluj-Napoca_______________________________________________
10V
5V
0V
SEL>> -5V V(R1:2,L1:2) 1.0A
0.5A
0A
-0.5A 0s I(D1) Time 10ms 20ms 30ms 40ms 50ms 60ms 70ms 80ms 90ms 100ms
a)
b)
Figura 2. 15 Formele de und ale unui redresor monofazat monoalternan cu sarcin RL, L=10mH, R=10 Ohm; a) simulare Matlab, b) simulare PSpice
Privind cele dou simulri putem spune c prezena inductanei L n componena sarcinii are caracterul de a crete unghiul de conducie i realizeaz o diminuare medie a tensiunii de ieire, dar forma curentului prezint o alur mai puin ondulat. Valoarea medie a tensiunii de ieire este dat de: U dmed = U 1 cos 1 c U s sin(t ) = s 2 c 2 0
(2.31)
2.4 Redresoare monofazate dubl alternan
Deoarece redresoarele monoalternan ofer un randament sczut prin redresarea unei singure alternane a tensiunii de alimentare n majoritatea circuitelor unde se impune prezena unui astfel de circuit de redresare se folosesc redresoarele dubl alternan. Din punct de vedere constructiv aceste tipuri de redresoare se pot clasifica n: redresoare dubl alternan cu transformator cu priz median redresoare dubl alternan n punte de diode
n paragrafele urmtoare se va face un studiu asupra acestor tipuri de redresoare din punct de vedere al sarcinii conectat la bornele redresorului.
25
Modelarea convertoarelor n comutaie_______________________________________________
2.4.1 Redresoare dubl alternan cu sarcin rezistiv
n figura 2.16 sunt prezentate shemele de principiu ale unui redresor dubl alternan cu priz median i n punte de diode.
a)
b)
Figura 2. 16 Schema de principiu a unui redresor monofazat dubl alternan a) cu priz median, b) n punte de diode
Dac ne raportm la figura 2.16 a), redresorul cu priz median, se observ c acest circuit este format din dou redresoare monoalternan conectate astfel nct n alternana pozitiv va conduce dioda D1, iar n alternana negativ va conduce dioda D2. Astfel putem scrie curentul prin sarcin ca fiind suma curenilor ce strbat cele dou diode, avnd acelai sens n ambele alternane. T is = i1 + i2 is (t ) = i1 (t ) + i2 (t ) = i1 (t ) + i1 t 2 (2.32)
Prin urmare forma curentului de sarcin este dubl alternan i considernd dioda liniar putem rescrie curentul de sarcin ca fiind:
is (t ) = I s max sin(t ) , I s max =
E2max Ri + R
(2.33)
Dezvoltarea n serie Fourier a curentului de sarcin duce la relaia:
2 4 cos 2kt is = I s max k =1 (2k 1)(2k + 1) de unde rezult c valoare medie a curentului redresat i a tensiunii redresate sunt de forma: (2.34)
I 0 = I smed =
U 0 = U smed =
2 I s max
=
=
1 2 E2max R + Ri
Rs 2 E2max Rs + Ri
(2.35)
2U s max
(2.36)
26
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Ca o prim concluzie a redresoarelor dubl alternana putem spune c, componentele continue se dubleaz fa de redresorul monoalternan. De asemenea, se observ c frecvena minim a tensiunii redresate (a ondulaiilor) este dublul frecvenei tensiunii aplicate n primarul transformatorului, deci: 2 f . Astfel putem scrie valoarea efectiv a curentului prin sarcin ca fiind de forma:
I sef = 1 2
2
I
0
2 s max
sin 2 (t )d (t ) I sef =
I s max 2
(2.37)
iar valoarea tensiunii efective este: U sef = U s max 2
(2.38)
n cazul acestor redresoare curentul maxim prin diod i tensiunea invers maxim la bornele acesteia sunt date de relaiile:
I DM = I s max =
E2max Ri + R
(2.39) (2.40)
(U Dinv ) M = 2 E2max Ri I s max 2 E2max
Analiznd relaia (2.40), putem spune c tensiunea invers pe diod este de dou ori mai mare n cazul redresoarelor dubl alternan dect n cazul redresoarelor monoalternan. Daca ne raportm la figura 2.16 b), redresorul dubl alternan n punte de diode, n alternana pozitiv diodele D1 i D3 conduc, iar diodele D2 i D4 sunt blocate, urmnd ca n alternana negativ s conduc diodele D2 i D4, iar diodele D1 i D3 sunt blocate. Curentul prin sarcin are acelai sens n ambele alternane iar formele de und ale redresorului n punte sunt identice cu cele ale redresorului cu priz median. Spre deosebire de redresoarele dubl alternan cu priz median care necesit un transformator mai costisitor datorit numrului de spire dublu i a tensiuni inverse pe diod de dou ori mai mare dect n cazul redresorului monoalternan, redresoarele n punte elimin aceaste dezavantaje, astfel c la aceeai putere de ieire, se poate folosi un transformator mai mic i se pot utiliza diode ce au tensiunea invers la jumtate din cea corespunztoare diodelor folosite la redresoarele cu priz median.
27
Modelarea convertoarelor n comutaie_______________________________________________
2.4.2 Redresoare monofazate dubl alternan cu sarcin RC paralel
Aceste redresoare dubl alternan cu sarcin RC paralel vor fi studiate cu aceleai ipoteze ca n cazul redresoarelor monoalternan cu sarcin RC: transformatorul i dioda considerate ideale. Schemele de principiu ale acestor circuite se prezint n figura urmtoare.
a)
b)
c)
Figura 2. 17 Schema de principiu a redresoarelor dubl alternan cu sarcin RC paralel a) cu priz median, b) n punte de diode, c) formele de und caracteristice ale tensiunii de ieire
Dac ne raportm la circuitul cu priz median, n intervalul [1 , 2 ] , dioda D1 considerat ideal, este deschis i tensiunea pe sarcin este egal cu tensiunea indus n secundar :
us (t ) = e2 (t ) = E2 max sin( t )
iar curentul prin sarcin este dat de:
(2.41)
is =
E2max sin t R
(2.42)
, curentul prin condensator fiind dat de relaia:
iC (t ) = C
duC (t ) = C E2 max cos t dt
(2.43)
Curentul prin diod este suma curenilor prin rezisten i condensator:
28
Universitatea Tehnic din Cluj-Napoca_______________________________________________
iD (t ) = iC (t ) + iS (t ) iD (t ) =
Pentru t = 2 , rezult iD=0, deci:
E2max 1 + ( R C ) 2 sin(t + ) = I m ax sin(t + ) R
(2.44)
2 = arctg ( R C )
(2.45)
n intervalul ( 2 ,1 + ) , dioda este blocat iar condensatorul se descarc pe rezistena de sarcin :
t 2 us (t ) = E2max sin 2 exp R C
La acest redresor condiia de periodicitate se pune pentru 1 i + 1 , deci:
(2.46)
us (1 ) = us ( + 1 )
de unde rezult ecuaia transcendent de unde se calculeaz unghiul 1 :
(2.47)
+ 1 2 sin 1 = sin 2 exp R C
(2.48)
Pentru analiza i simularea acestor redresoare s-a implementat o platform Matlab bazat pe ecuaiile difereniale ce se pot scrie n momentul funcionrii circuitului. Analiza acestor circuite s-a fcut pornind de la modelul transformatorului prezentat n subcapitolele anterioare i de la modelul trei al diodei, aplicate pe schema de principiu 2.17 b). Analiza acestor redresoare are la baz cinci intervale distincte de funcionare, dar, deoarece pe intervalele de blocare a diodelor, ecuaiile matematice se scriu la fel, ntregul circuit poate fi modelat cu ajutorul a trei sisteme de ecuaii difereniale. Considernd iniial diodele blocate, ecuaiile matematice ce se pot scrie n momentul funcionrii redresorului sunt date de relaia 2.49.
di1 L2 (e R1 i1 ) M (( R2 + 2 RdB ) i2 + u + ud ) dt = L1 L2 + M 2 di2 L1 (( R2 + 2 RdB ) i2 + u + 2 ud ) + M (e R1 i1 ) = L1 L2 + M 2 dt u du i2 R = C dt
(2.49)
29
Modelarea convertoarelor n comutaie_______________________________________________
Intervalul doi de funcionare ncepe odat cu intrarea n conducie a diodele D1 i D3. Ecuaiile matematice caracteristice acestui interval de funcionare sunt date de: di1 L2 (e R1 i1 ) M (( R2 + 2 Rd ) i2 + u ) dt = L1 L2 + M 2 di2 L1 (( R2 + 2 Rd ) i2 + u ) + M (e R1 i1 ) = L1 L2 + M 2 dt u du i2 R = C dt
(2.50)
Odat ce tensiunea pe condensator depete tensiunea din secundar, diodele D1 i D3 se blocheaz. Astfel apare un al treilea interval de funcionare n care diodele convertorului sunt blocate. Ecuaiile matematice ce descriu funcionarea circuitului sunt identice cu ecuaiile prezentate n relaia 2.49. Intrarea n conducie a diodelor D2, D4 caracterizeaz nceputul intervalului patru de funcionare, care se sfrete odat cu blocarea acestor diode. Ecuaiile matematice sunt date de: di1 L2 (e R1i1 ) + M (( R2 + 2 Rd ) i2 + u ) dt = L1 L2 + M 2 di2 L1 (( R2 + 2 Rd ) i2 + u ) + M (e R1 i1 ) = L1 L2 + M 2 dt u du i2 R = C dt
(2.51)
Similar intervalului trei de funcionare, este intervalul cinci, interval cuprins ntre blocarea diodelor D2 i D4 i redeschiderea diodelor D1 i D3. Ecuaiile matematice ce se scriu pe acest interval fiind date de relaia 2.49. Pe baza sistemelor de ecuaii difereniale prezentate n relaiile anterioare, o platform Matlab de simulare a fost implementat. La fel ca n cazul platformei de simulare a redresoarelor monoalternan, platforma dispune de o interfa grafic ce permite vizualizarea formelor de und att n regim tranzitoriu ct i n regim permanent de funcionare, precum i modificarea parametrilor circuitului. n figurile urmtoare se prezint rezultatele obinute n urma simulrilor acestor circuite cu platforma Matlab implementat. Valorile de simulare a acestor redresoare sunt identice cu valorile folosite n cazul simulrii redresoarelor monoalternan cu sarcin RC paralel prezentate n tabelul 2.5.
30
Universitatea Tehnic din Cluj-Napoca_______________________________________________
a)
b)
Figura 2. 18 Simulare Matlab a redresoarelor dubl alternan cu sarcin RC paralel pentru setul 2 de valori conform tabelului 2.4. a) regimul tranzitoriu; b) regimul permanent
20A 0A -20A 20V 0V -20V 7.42V 7.41V SEL>> 7.40V 2.96ms V(R2:2)
I(D4)
I(R1)
I(D1)
V(V1:+)
V(TX1:3,D3:2)
2.97ms
2.98ms Time
2.99ms
3.00ms
Figura 2. 19 Simulare PSpice a redresorului dubl alternan cu setul 2 de valori n regim permanent
Comparnd rezultatele obinute n urma simulrilor Matlab i PSpice putem spune c modelul matematic dedus, coincide cu simulrile returnate de un simulator dedicat analizei circuitelor electrice. Alura formelor de und obinute, precum i valorile tensiunilor i a curenilor din circuit, indic faptul c analiza i modelarea circuitului a fost corect. Privind spre setul doi de valori, unde frecvena a fost aleas la 50Khz, putem spune c modelul transformatorului este validat i la frecvene mult mai mari dect frecvena reelei.
31
Modelarea convertoarelor n comutaie_______________________________________________
a)
b)
Figura 2. 20 Simulare Matlab a redresorului dubl alternan cu sarcina RC pentru setul 1 de valori. a) regim tranzitoriu, b) regim permanent
2.0A 0A -2.0A I(R1) 400V 0V SEL>> -400V V(V1:+) 20V 10V
20V 10V SEL>> 0V 540ms 550ms V(R2:2) 2.0A 0A -2.0A
I(D4)
I(D1)
400V 0V -400V
I(R1)
I(D4)
I(D1)
V(V1:+)
0V 0s V(R2:2)
10ms
20ms
30ms Time
40ms
50ms
60ms
560ms
570ms Time
580ms
590ms
600ms
a)
b)
Figura 2. 21 Simulri PSpice a redresorului dubl alternan cu setul 2 de valori n regim tranzitoriu i permanent
2.5
Concluzii i contribuii personale
Pornind de la o schem de principiu a unui transformator ce este utilizat n electronica de putere att la frecvena reelei ntr-un convertor c.a.-c.c, ct i la frecvene mult mai mari n cazul convertoarelor c.c.-c.c., s-au dezvoltat platforme Matlab de simulare care s valideze un model matematic propus. Simulrile PSpice au condus la aceleai rezultate, dar o verificare mai riguroas a modelului s-a considerat important. Astfel, validarea modelului transformatorului, n ansamblu reea de alimentare, redresor a condus la implementarea unor platforme de simulare a redresoarelor
32
Universitatea Tehnic din Cluj-Napoca_______________________________________________
monofazate. Plecnd de la analiza clasic a acestor redresoare, s-au determinat pe cale analitic formulele de calcul a curentului i a tensiunii de la ieirea acestora n funcie de tipul sarcinii. Platformele Matlab implementate, n vederea simulrii redresoarelor monofazate au la baz modele matematice descrise sub forma ecuaiilor difereniale, ce au fost deduse pentru fiecare tip de redresor, n funcie de natura sarcinii. Aceast metod de analiz pe baza ecuaiilor difereniale este necesar n vederea reprezentrii grafice a mrimilor de interes, curentul n primarul i n secundarul transformatorului, tensiune de sarcin. Platformele Matlab de simulare a redresoarelor monofazate, cu diferite tipuri de sarcin, calculeaz i returneaz valoarea unghiului de conducie al diodei, valoarea tensiunii medii, valoarea curentului mediu i reprezint grafic formele de und, ce pot fi vizualizate att n regim tranzitoriu ct i n regim permanent de funcionare, permind utilizatorului s aib un control asupra parametrilor circuitului, printr-o interfa grafic. Aceste platforme au fost validate prin simulri PSpice ori prin msurtori experimentale. Dintre contribuiile personale se pot aminti: Implementarea unui model matematic de transformator n vederea simulrii convertoarelor n comutaie Validarea modelului de transformator propus prin includerea acestuia n platformelor Matlab implementate de simulare a redresoarelor, mono i dublalternan Implementarea platformelor Matlab de simulare a redresoarelor pe baza modelelor ideale i reale ale diodelor.
33
Modelarea convertoarelor n comutaie_______________________________________________
2.5 Bibliografie selectiv
[1] F. Ionescu, D. Floricau, S. Nitu, Jean-Paul Six, Philippe Delarue, C. Bogus Electronica de putere, Convertoare statice, Editura Tehnica Bucuresti, 1998, ISBN 973-311262-3 [2] V. Popescu Electronica de putere, Editura de Vest Timisoara, 1998, ISBN 973-360306-6 [3] N. Palaghita Dispozitive semiconductoare de putere, partea I, Editura Mediamira Cluj-Napoca, 2002, ISBN 973-9358-96-9Dasdasda [4] N. Palaghita, D. Petreus, C. Farcas Electronica de comanda si reglaj, Editura Mediamira Cluj-Napoca, 2006, ISBN (10) 973-713-109-6; ISBN (13) 978-973-1096Dasdasd [5] G. Mindru Teoria circuitelor electrice, Editura U.T. Pres Cluj-Napoca 2004, ISBN 973-662-110-3 [6] V. Popescu,D. Lascu, D. Negoitescu Surse de alimentare in telecomunicatii, Editura de Vest Timisoara, 2002, ISBN 973-36-0365-1Dasdasdas [7] John O. Attia Electronics and circuit analysis, CRC Press 1999, ISBN 0-8493-1176-4 [8] Adrian TAUT, Ovidiu Pop, Serban Lungu, Power Transformers Model used for Inverters Simulation SIITME 2010 IEEE 16th International Symposium for Design and Technology in Electronic Packaging September 23-26,2010 Pitesti, Romania [9] S. Lungu , O. Pop , Modelarea circuitelor electronice , Casa Cartii de Stiinta , Cluj Napoca 2006 , ISBN 973-686-975-X [10] Erickson R. W.- Some topologies of high quality rectifies, First International Conference on Energy, Power, and Motion control, May 5-6 1997. Tel Aviv, Israel-Keynote paper. [11] Erickson R., Madigan M., S. Singer.- Desing of simple high power factor rectifier based on the flyback convertor, Applied Power Electronics Conference Proceedings, 1990, pp. 792-801. [12] R Sheffer, Fundamentals of Power Electronics with Matlab, ISBN 1-58450-852-3 [13] Gacsadi Alexandru, Electronic de putere, Universitatea din Oradea, 2009 [14] Lena Max, T. Thiringer, T. Underland, R. Karlsson, Power Electronics Design Laboratory Exercise for Final-Year M.SC. Students, IEEE Transaction On Education, IEEE Education Society, Noiembrie 2009, Volumul 52, Numarul 4, ISSN 0018-9359 [15] C.A.Canesin, F.Gonvalves, L.P.Sampaio, Simulation Tools for Power Electronics Courses Based on Java Technologies, IEEE Transaction On Education, IEEE Education Society, Noiembrie 2010, Volumul 53, Numarul 4, ISSN 0018-9359 [16] G.Chindri, A.Rusu, Proiectare asistat a circuitelor electronice - aplicaii-, Casa Crii de tiin, Cluj-Napoca, 2001. [17] Andrew Knight, Basics of MaTlab and Beyond, Library of Congress, ISBNO-84932039-9, 1999 34
Universitatea Tehnic din Cluj-Napoca_______________________________________________
[18] K.E. Lonngren, S.V.Savov, Fundamental of Electromagnetics with MATLAB, Scitech Publishing, ISBN 1-891121-30-8,2005 [19] L.F. Shampine, I Gladwell, S.Thompson, Solving Odes with Matlab, Cambridge University Press, New York, ISBN-13 978-0-511-07707-4 (EBL), 2003 [20] *** Texas Instruments Aplication Notes, Catalog 2002 [21] *** Unitrode Aplication Notes, Catalog 2002
35
Modelarea convertoarelor n comutaie_______________________________________________
3 Capitolul III. Analiza, modelarea matematic, simularea i implementarea convertoarelor c.c.-c.c.
Funcionarea convertoarelor c.c-c.c. n comutaie are la baz funcionarea n regim de ON-OFF a tranzistoarelor comandate de un semnal PWM (Pulse-width Modulation) cu o frecven n domeniul 20kHz - 400kHz [5][8][11] [12][15]. Exist o mare varietate de convertoare de tensiune continu ce lucreaz n comutaie, iar o clasificare a acestora se poate face pe baza principiilor de funcionare ce definesc comportarea acestora: - convertoare fr separare galvanic : - convertoare cu separare galvanic : convertorul Flyback convertorul Forward convertorul Push-Pull convertorul Buck convertorul Boost convertorul Buck-Boost convertorul Cuk convertorul Sepic convertoare rezonante
Din tipurile de convertoare c.c.-c.c. enumerate mai sus, doar convertoarele Buck i Boost constituie configuraii de baz, celelalte convertoare fiind combinaii a acestor topologi. Aceste convertoare se caracterizeaz prin faptul c stabilizeaz valoarea tensiunii de la intrarea lor n tensiuni continue de valori mai mici sau mai mari sau eventual reglabile ntr-o scar dat. Ca i principiu de funcionare, convertoarele n comutaie lucreaz pe principiul conectrii i deconectrii sarcinii la sursa de alimentare prin intermediul elementului de putere, funcionnd att n regim de curent nentrerupt (CCM - continuous conduction mode) ct i n regim de curent ntrerupt (DCM discontinuous conduction mode). Regimul CCM de funcionare a convertoarelor n comutaie, este caracterizat de faptul c, pe o perioad de comutaie a tranzistorului, curentul prin bobina de lucru a convertorului nu atinge
36
Universitatea Tehnic din Cluj-Napoca_______________________________________________
valoarea zero, iar tensiunea de ieire poate fi exprimat ca o dependen de tensiunea de alimentare a convertorului i de factorul de umplere al semnalului PWM cu care se comand tranzistorul. Modul de funcionare DCM al unui convertor CC-CC apare n momentul n care, n circuit, apar condiiile ca unul din comutatoare (tranzistor sau diod) s se blocheze n mod natural. De regul, acest regim apare atunci cnd riplul curentului prin bobin are valori mari n timpul funcionrii cu o sarcin relativ mic, iar comutatoarele convertorului sunt unidirecionale n curent (curentul prin comutator tinde s devin negativ). Astfel pentru o durat scurt de timp dintr-o perioad de comutaie, curentul prin bobin atinge valoarea zero i rmne la aceast valoare pn n urmtoarea perioad de comutaie cnd unul din cele dou comutatoare se deschide din nou. n acest caz particular de funcionare a convertoarelor, proprietile acestora se modific radical. US , devine dependent de sarcin i impedana E circuitului de ieire este mult ridicat [5][8][12]. Dei funcionarea n regim DCM este un caz particular datorat n general unei dimensionri greite a bobinei convertorului, n practic se proiecteaz surse n comutaie, care s funcioneze n acest mod. Astfel funcia de transfer n tensiune M =
3.1 Convertoare c.c-c.c fr separare galvanic
3.1.1 Convertorul cobortor (Buck)
Convertorul cobortor (Buck), se regsete integrat pe majoritatea aparatelor electronice moderne, caracterizat fiind de faptul c tensiunea continu furnizat la ieire, este mai mic dect tensiunea continu aplicat la bornele de intrare a convertorului. Topologia acestui convertor este una simpl, ce ofer o eficien ridicat n majoritatea aplicaiilor n care este folosit [5][8][9][12]. Schema de principiu a convertorului Buck este prezentat n figura 3.1, iar formele de und caracteristice curentului i tensiunii prin bobina L n regim CCM i DCM de funcionare, sunt de asemenea reprezentate.
37
Modelarea convertoarelor n comutaie_______________________________________________
a)
b)
c)
Figura 3. 1 a) Topologia de principiu a convertorului Buck; b) forma curentului n regim CCM de funcionare; c) forma curentului n regim DCM de funcionare
La intrarea convertorului se aplic o tensiune continu E i se asigur la ieirea pe rezistena de sarcin RS o tensiune continu US n condiiile n care tensiunea de intrare i sarcina variaz ntre anumite limite. O analiz matematic asupra convertorului se poate realiza n funcie de strile de conducie i blocare a celor dou comutatoare. Dac ne raportm la modul CCM n intervalul de conducie a tranzistorului [0-DT], unde cu D s-a notat factorul de umplere a semnalului de comand (duty-cycle), tensiunea pe bobin este dat de relaia (3.1), iar curentul crete liniar cu o panta dat de relaia (3.2). UL = E US = L I I I I iL = L L max L min = L L max L min t TC D T iL = E Us L (3.1)
(3.2)
38
Universitatea Tehnic din Cluj-Napoca_______________________________________________
La momentul de timp DT tranzistorul este comandat s se blocheze. Deoarece curentul prin bobin nu poate cdea instant la zero, iar tensiunea la bornele acesteia ii schimb polaritatea fiind egal cu inversul tensiunii de sarcin, dioda intr n conducie pe intervalul de timp [DT-T], interval n care curentul prin bobin scade cu o pant dat de relaia (3.4). U L = U s = L I I I I iL = L L max L min = L L max L min (1 D) T dt TB iL = Us L (3.3)
(3.4)
Cum valoarea medie a tensiunii pe bobin pe o perioad de comutaie este nul, prin relaia (3.5) se arat faptul c tensiunea de ieire este direct proporional cu factorul de umplere a semnalului de comand a tranzistorului convertorului Buck. U L = ( E U s ) D T + [U s (1 D) T ] = 0 E D T U s T = 0 U s = D E (3.5)
Curentul de sarcin is este media curentului prin bobina L a convertorului cobortor. Astfel: Cum iL este : Is = I L m ax + I L m in U s = Rs 2 (3.6)
iL = I L m ax I L m in =
E Us U D T = s (1 D) T L L
(3.7)
Putem exprima valoarea curentului minim i maxim prin bobin din relaiile (3.6) i (3.7) ca fiind:
E Us I L m in + L D T + I L m in U s U E Us U E Us = 2 I L min = 2 s D T I L min = s D T 2 2 L Rs Rs L Rs Us E Us + D T I L max = 2 L Rs (3.8) n regim de conducie nentrerupt a convertorului, valoarea curentului minim prin bobin, pe o perioad de comutaie, nu trebuie s ating valoarea zero. Astfel condiia ce trebuie ndeplinit pentru a asigura acest regim de funcionare este dat de relaia (3.9). I L min > 0 Us E Us D T > 0 Rs 2 L
Us E Us 2 L E Us 2 L U s (1 D) 2 L > D T > D > > (1 D) Rs Rs T Us Rs T Us RsT 2 L
(3.9)
39
Modelarea convertoarelor n comutaie_______________________________________________
Dac ne raportm la modul de lucru DCM prezentat n figura 3.1 c), n intervalul [D1T-T] valoarea curentului prin bobina L a convertorului este zero i se menine la aceast valoare pn n urmtoarea perioad de comutaie. Acest fapt se datoreaz blocrii pe cale natural a diodei convertorului, care ar trebui pe acest interval s conduc un curent negativ. Astfel valoarea curentului i tensiunii pe bobina L devin nule pe intervalul [D1T-T]. Valoarea curentului pe condensatororul C, iC, este dat de relaia: [0 D1T ] ic = iL is [ D1T T ] ic = is ;U L = 0, iL = 0 Cum valoarea tensiunii pe bobin pe o perioad de comutaie este nul putem scrie: UL = E Us D D T + (U s D1 T ) + 0 T = 0 U s ( D + D1 ) = D E U s = E L D D1 (3.11) (3.10)
Relaia (3.11) arat faptul c tensiunea de ieire n conducie ntrerupt nu mai este dependent doar de factorul de umplere ci i de perioada de conducie a diodei. Aceast perioad este o perioad necunoscut i, astfel o estimare a tensiunii de ieire nu se poate realiza. Cunoscnd valoarea maxim a curentului prin bobin i tiind c valoarea curentului mediu absorbit de la sursa de alimentare este egal cu valoarea curentul prin tranzistor, dac considerm convertorul ideal, atunci din egalarea puterilor putem scrie:
U s2 1 = E I m ed ; I m ed T = I L m ax D T Ps = Pi Rs 2 E Us E Us 2 D T D T I m ed = I L m ax = L 2 L U s2 E Us U 2 R T 2 Us = E D 2T s2 = D 1 2 L 2 L E E Rs Folosind notaia M =
(3.12)
Us pentru raportul de transfer n tensiune a convertorului n regim E DCM de funcionare, putem scrie astfel, raportul de transfer ca fiind:
M= Us = E 2 2 L 4 Rs T 1+ 1+ D2 (3.13)
40
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Relaia (3.13) indic faptul c n regim DCM, raportul de transfer n tensiune depinde pe lng factorul de umplere D i de raportul 2 L , raport ce se regsete i n relaia (3.9). Aceast Rs T 2 L se prezint n Rs T
relaie indic delimitarea celor dou moduri de lucru ale convertorului. O detaliere a variaiei raportului de transfer M n funcie de factorul de umplere D i de raportul figura urmtoare.
Figura 3. 2 Caracteristica de transfer n tensiune a convertorului Buck n funcie de factorul de umplere D i raporul 2L/RT
Figura 3.2 prezint caracteristica convertorului Buck n funcie de variaia factorului de umplere D i al raportului
2 L . Se poate observa c pentru valori mai mici dect unu ale Rs T
raportului, convertorul lucreaz n mod discontinuu, iar comanda acestuia este greu de realizat. Pentru simularea i analiza funcionrii convertorului s-a implementat o platform Matlab ce permite vizualizarea formelor de und ale curentului i tensiunii de ieire n bucl nchis, atunci cnd, la ieirea acestui convertor avem o sarcin variabil, sau cnd, la intrarea convertorului se aplic o tensiunea variabil. Pentru a implementa platforma Matlab este necesar a se scrie ecuaiile difereniale caracteristice fiecrui interval de funcionare n parte. Astfel n tabelul 3.1 se prezint ecuaiile difereniale i schema echivalent la care se reduce convertorul n momentul funcionrii.
41
Modelarea convertoarelor n comutaie_______________________________________________
Tabel 3. 1 Ecuaiile difereniale i schemele echivalente ale convertorului Buck n intervalele de funcionare
Convertorul Buck model matematic diferenial
Schema Ecuaii Intervalul I de funcionare: Tranzistorul conduce, dioda blocat. dus U = iL s dt Rs diL E U s dt = L 1 C
Intervalul II de funcionare: Tranzistorul blocat, dioda conduce
dus U = iL s Rs dt diL = U s dt Rs
1 C
Intervalul III de funcionare: Tranzistorul i dioda blocate dus U 1 = iL s dt Rs C diL dt = 0
Platforma implementat, permite utilizatorului introducerea parametrilor convertorului cum ar fi: valorile bobinei de lucru, a condensatorului de filtraj, frecvena de comutaie a tranzistorului de putere, tensiunea de referin la care se dorete s lucreze convertorul, numrul de perioade de vizualizare, etc. Rezultatele obinute n urma rulrii platformei Matlab sunt prezentate n figurile urmtoare [17][20].
42
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 3. 3 Rezultatele obinute n urma simulrii Matlab a convertorului Buck n bucl nchis cu sarcin variabil: R=10 Ohm pentru 0-N/3 perioade, R=5 Ohm pentru N/3 2N/3 perioade, R=20 Ohm pentru 2N/3 - N perioade de vizualizare, pentru o tensiune de referin de 5.5V i o tensiune de alimentare E=11V.
Figura 3. 4 Rezultatele obinute n urma simulrii Matlab a convertorului Buck n bucl nchis cu tensiune de intrare variabil: E=40 V pentru 0-N/3 perioade, E=20 V pentru N/3 2N/3 perioade, E=60 V pentru 2N/3 - N perioade de vizualizare, pentru o tensiune de referin de 10 V i o rezisten de sarcin R=5 Ohm .
Pe baza ecuaiilor difereniale prezentate n tabelul 3.1 s-a realizat platforma de simulare a convertorului buck n bucl nchis prezentat n figurile 3.3 i 3.4. Considernd un numar N de perioade de funcionare a convertorului, s-a impus ca acesta s funcioneze att cu sarcin variabil figura 3.3 ct i cu tensiune de intrare variabil, figura 3.4. Setnd factorul de umplere D la o valoare iniial de 20% din perioada de comutaie, i modificnd sarcina sau tensiunea de intrare la 43
Modelarea convertoarelor n comutaie_______________________________________________
1/3 i 2/3 din intervalul de funcionare ales se poate observa c, tensiunea de referin impus este meninut. Privind figura 3.3 se poate observa c platforma implementat permite funcionarea convertorului att n regim de conducie nentrerupt ct i n regim de conducie ntrerupt meninnd indiferent de regimul de funcionare valoarea impus a tensiunii de ieire. Relaia matematic de setare a regimului de lucru, este relaia dat de ecuaia (3.9), iar dac aceast condiie este ndeplinit tensiunea de ieire este uor de calculat i se exprim pe baza relaiei (3.5). Dac condiia din relaia (3.9) nu este ndeplinit, atunci convertorul lucreaz n regim ntrerupt iar tensiunea de ieire este dat de:
1 R D2 2 z = L f com v = 1 ( z 2 + 4 z ) z 2 Us = v E
(3.14)
Factorul de umplere se recalculeaz dup fiecare perioad de lucru a convertorului i este dat de relaia: U ref Us Dnou = Dvechi + E (3.15)
O astfel de platform Matlab de simulare a convertorului Buck n bucl nchis este util i necesar atunci cnd se dorete implementarea unui astfel de convertor. Pe baza rezultatelor furnizate de platforma Matlab utilizatorul poate obine un algoritm exact de comand a convertorului i poate estima timpul de rspuns al acestuia la variaiile sarcinii ori a tensiunii de intrare.
3.1.1.1 Implementarea practic a convertorului Buck n bucl nchis
Pornind de la algoritmul de nchidere a buclei de tensiune implementat n platforma Matlab, s-a trecut la implementarea practic a convertorului Buck n bucl nchis folosind ca modul de comand a tranzistorului de putere o plac de dezvoltare Infineon ce conine un microcontroller din familia C508. Circuitul de control implica un modul pentru generarea unui semnal PWM, un convertor analog-digital i un algoritm soft care stabilete legea de control implementata pe un procesor. Schema logica ce descrie algoritmul este prezentat n figura 3.5, iar algoritmul complet este prezentat n anexa 3-2. Factorul de umplere al semnalului de comand este
44
Universitatea Tehnic din Cluj-Napoca_______________________________________________
modulat de tensiunea de la ieirea convertorului Buck, cu ajutorul convertorului A/D. Precizia cu care tensiunea de ieire este controlat, este dat de rezoluia convertorului A/D, calculat cu formula urmtoare :[18][21]
resolutionADC = Vref [V ] 2n [bit ] (3.16)
, unde Vref reprezint tensiunea de referin a convertorului A/D, iar n este numrul de bii ai convertorului A/D.
Figura 3. 5 Schema logic a algoritmului de control
O intrare analogic a convertorului A/D este folosit pentru a seta valoarea de referina a regulatorului, iar cealalt intrare este folosit pentru a msura semnalul de reacie. Cele dou valori numerice sunt comparate, iar n urma rezultatului se intervine asupra factorului de umplere, reglnd n acest fel tensiunea la bornele de ieire a convertorului Buck, ca rezultat al proporionalitii dintre aceasta i factorul de umplere, ce este incrementat sau decrementat cu o valoare fix pn cnd tensiunea de la ieirea convertorului ajunge n jurul valorii de referin setate. n figurile 3.6 i 3.7 sunt prezentate rezultatele obinute n urma msurtorilor asupra tensiunii de ieire a convertorului Buck implementat practic n bucl nchis, captate cu ajutorul unui datalog-er. Asemenea platformei Matlab, s-a impus o tensiune de referina: 5,5V i 7V i s-a modificat sarcina. O prim metod de control a convertorului const ntr-o variaie lent a factorului de umplere.
45
Modelarea convertoarelor n comutaie_______________________________________________
Figura 3. 6 Forma de und a tensiunii de ieire a convertorului Buck achiziionat cu ajutorul unui dataloger la variaia sarcinii: Is=(200mA,300mA,100mA) i tensiunea de referin 5,5 V
Figura 3. 7 Forma de und a tensiunii de ieire a convertorului Buck achiziionate cu ajutorul unui dataloger la variaia sarcinii: Is=(200mA,300mA,100mA) i tensiunea de referin 7 V
a)
b)
Figura 3. 8 Forma de und a tensiunii la ieirea convertorului Buck cu tensiunea de referin 5V. a) la pornire curent de sarcin 500mA, b) salt de curent de la 500mA la 1A, cu factor de umplere lent variabil
Figura 3.8 prezint forma de und a tensiunii la ieirea convertorului n regim de pornire i la variaia sarcinii n momentul funcionrii. Implementarea algoritmului de control i interpretarea rezultatelor la modificri mari ale sarcinii, au condus la urmtoarele concluzii: algoritmul este satisfctor din punct de vedere a stabilizrii tensiunii de sarcin, dar, datorit variaiei lente a factorului de umplere timpul de rspuns a circuitului este lent i apar variaii mari ale tensiunii de ieire n regim tranzitoriu. Astfel s-a trecut la o optimizare a algoritmului de control prin care se dorete reducerea timpului de rspuns a convertorului Buck i diminuarea salturilor mari a 46
Universitatea Tehnic din Cluj-Napoca_______________________________________________
tensiunii de ieire. Soluia adoptat a fost incrementarea i decrementarea factorului de umplere cu o valoarea proporional cu diferena dintre valoarea de referin i valoarea msurat. Rezultatele obinute n urma implementrii metodei a doua de control sunt prezentate n figura 3.9.
a)
b)
Figura 3. 9 Forma de und a tensiunii la ieirea convertorului Buck cu tensiunea de referin 5V. a) la pornire curent de sarcin 500mA, b) salt de curent de la 500mA la 1A, cu factor de umplere rapid variabil
Ca o concluzie asupra figurilor 3.9 a) i b), putem spune c timpul de rspuns (tr) al convertorului Buck n regim de pornire este mult mbuntit n varianta unei comenzi cu factor de umplere rapid variabil tr = 16ms , dect n cazul comenzii cu factor de umplere lent variabil tr = 146ms , iar n cazul variaiei sarcinii timpul de rspuns n cea de-a doua variant de comand este deasemea mai scurt tr = 14.8ms ; pentru prima variant obinnd un tr = 37.2ms . Asupra variaiei tensiunii de ieire putem spune c n ambele cazuri la pornire se obine acelai suprasalt n jurul valorii de 200mV peste valoarea de referin impus, dar n cazul variaiei sarcinii n timpul funcionrii convertorului, pentru prima variant de comand se obine o scdere a tensiunii de sarcin mult peste valoarea obinut cu cel de-al doilea algoritm. Dac folosind primul algoritm s-a obinut o stabilizare a convertorului de 60% la variaia sarcinii, folosind algoritmul doi stabilizarea la variaia sarcinii crete n jurul valorii de 85%.
Tabel 3. 2 Valorile obinute n urma msurtorilor
tr pornire [ms] tr sarcina [ms] Us [V] U s max U s min S= U nom
Msurtori asupra convertorului Buck n bucl nchis Factor de umplere lent variabil Factor de umplere rapid variabil 146 16 37,2 14,8 3 1,5 60[%] 85[%]
47
Modelarea convertoarelor n comutaie_______________________________________________
Variatia tensiunii de iesire
5,075 5,07 5,065 Tensiunea de iesire 5,06 5,055 5,05 5,045 5,04 5,035 5,03 5,025 0 2 4 6 8 10 12 14 Tensiunea de intrare Series1
Figura 3. 10 Variaia tensiunii de sarcin la variaia tensiunii de intrare pentru algoritmul doi i uref 5V
Ca o concluzie asupra platformei Matlab implementat, putem spune c utilitatea unei astfel de platforme, este dat de posibilitatea de estimare a timpilor de rspuns ai convertorului, a valorilor tensiunii i curentului de sarcin, precum i n stabilirea unor algoritmi de reglare a convertorului. De asemenea este permis vizualizarea formelor de und a curentului prin bobin i a tensiunii pe sarcin, putnd modifica att parametrii circuitului ct i logica de comand a acestuia.
3.1.2 Convertorul ridictor (Boost)
Convertorul Boost este cel mai cunoscut circuit utilizat pentru obinerea la ieirea sa a unei tensiuni medii mai mari dect tensiunea la care se alimenteaz [10][12]. Schema de principiu a convertorului Boost este prezentat n figura 3.11, iar din punct de vedere al modului de funcionare, convertorul Boost funcioneaz att n regim CCM ct i n regim DCM.
Figura 3. 11 Schema de principiu a convertorului Boost
48
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Analiznd convertorul n regim nentrerupt i staionar, valoarea tensiunii i valoarea curentului de la sfritul unui interval de funcionare trebuie s fie egale cu valorile de la nceputul intervalului. Formele de und ale curentului prin bobina L i ale tensiunii pe condensatorul C caracteristice convertorului boost n regim de funcionare staionar sunt prezentate n figura 3.12.
Figura 3. 12 Formele de und caracteristice convertorului Boost n regim staionar
Pe intervalul [0, DT] tranzistorul este nchis, tensiunea de intrare este aplicat direct inductanei L, determinnd prin aceasta un curent liniar cresctor, ceea ce duce la acumularea unei energii n inductan. Variaiile curentului prin bobin i a tensiunii pe condensator se exprim ca:
E iL (t ) = I 0 + t L u (t ) = U e 2at 0 C , unde a este o constant dat de: a = 1 2 Rs C
(3.17)
La sfritul acestui interval, similar cu sfritul perioadei de conducie a tranzistorului valorile curentului prin bobin i a tensiunii pe condensator vor fi date de relaiile: E iL = I 0 + D T L u = U e 2aDT 0 C (3.18)
Pe intervalul [DT,T], tranzistorul este deschis, iar variaia curentului prin bobin i tensiunea pe condensator este dat de relaiile: diL E uC dt = L duC = 1 i uC dt C Rs
(3.19)
49
Modelarea convertoarelor n comutaie_______________________________________________
Derivnd cea de-a doua ecuaie se obine: duC 2 1 diL duC 1 = dt C dt dt Rs C nlocuind (3.20)
diL din ultima ecuaie se obine pentru (3.20) o form de ordinul 2 a ecuaiei: dt
duC 2 du u 1 E = C C + dt Rs C dt L C L C duC 2 duC u 1 E + + C = dt dt Rs C L C L C duC 2 L duC L C + + uC = E dt Rs dt LC (3.21)
(3.22)
(3.23)
Ecuaia curentului se deduce n mod analog cu ecuaia tensiunii i este dat de relaia: diL 2 L diL + + iL = 0 L C dt Rs dt Dac notm p = diL i rescriem ecuaia 3.24, atunci aceasta devine: dt L C p2 + Soluiile acestei ecuaii sunt date de: L L 4 L C R R p1,2 = 2 L C
2
(3.24)
1 p +1 = 0 R
(3.25)
(3.26)
p1,2 =
1 i r = 2 R C
1 1 1 2 R C 2 R C L C
(3.27)
cum a =
1 putem rescrie soluiile ecuaiei 3.24 ca fiind: L C
p1,2 = a a 2 r 2
(3.28)
n funcie de soluiile ecuaiei se poate purta o discuie ce duce la trei cazuri distincte.
50
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Dac a = r atunci p1 = p2 = a iar valorile curenilor i tensiunilor pe fiecare interval sunt de forma:
E I1 = I 0 + L DT , t (0, DT ) 2 at U1 = U 0 e , t (0, DT ) I 0 = E + ( Ai + Bi t ) e 2 at , t ( DT , T ) R U = E + A + B t e 2 at , t ( DT , T ) ( u u) 0 Cazul al doilea este caracterizat de condiia a > r , ceea ce duce la p1,2 = a r .
(3.29)
Dac a < r atunci p1,2 = a jr de unde rezult valorile curenilor i tensiunilor pe fiecare interval de forma: E I1 = I 0 + L D T , t [0, DT ] 2 aDT , t [0, DT ] U1 = U 0 e I = E + [ A cos (T DT ) + B cos (T DT )] e 2 a (T DT ) , t [ DT , T ] i i 0 R 2 a (T DT ) , t [ DT , T ] U 0 = E + [ Ai cos (t t0 ) + Bi cos (t t0 )] e Coeficienii Ai, Bi, Au, Bu, din relaiile (3.29), (3.30) sunt dai de:
E Ai = I1 Rs E U1 E + a I1 L Rs Bi = r A = (U E ) 1 u 2 I1 Rs E U1 a Bu = r
(3.30)
(3.31)
Cum n modul CCM valoarea tensiunii pe bobin n timpul conduciei tranzistorului este egal cu valoarea tensiunii pe durata de blocare, putem s determinm valoarea tensiunii de sarcin exprimat n funcie de tensiunea de alimentare i factorul de umplere i raportul tensiune de ieire tensiune de intrare ca n relaia (3.32).
51
Modelarea convertoarelor n comutaie_______________________________________________
1 E D T = (U s E ) (1 D) T E = U s (1 D) U s = E 1 D M = Us = 1 E 1 D
(3.32)
Condiia pentru care convertorul funcioneaz n regim nentrerupt este ca valoarea curentului minim dat de relaia: iL min = astfel c:
Us E D T , s fie mai mare ca zero. Rezult Rs (1 D) 2 L
2 L D (1 D) 2 . Pe baza ecuaiilor prezentate anterior, se pot implementa platforme Rs T
Matlab utiliznd metoda de calcul simbolic, cu ajutorul crora s se determine valorile curentului i a tensiunii n regim staionar. n regim de conducie ntrerupt, valoarea curentului prin bobina L a convertorului ajunge la zero. Astfel avem un al treilea interval de funcionare n care tensiunea pe bobin i curentul au valoarea zero.
Figura 3. 13 Formele de und ale curentului i tensiunii pe bobin n regim ntrerupt de funcionare
tiind c pe perioada de conducie a tranzistorului tensiunea pe bobin U L = E i curentul prin condensator este dat de ic = Us , pe perioada de conducie a diodei, tensiunea pe bobin este R Us . n intervalul Rs
U L = E U s , iar curentul prin condensator se poate exprima ca: iC = iL is = iL
[D1T-T], curentul i tensiunea pe bobin sunt zero i putem exprima curentul prin condensator ca n cazul conduciei tranzistorului. Cum valoarea medie a tensiunii pe bobin ntr-o perioad de comutaie este nul, putem scrie astfel: E D T + ( E U s ) D1 T + 0 = 0 E ( D + D1 ) = U s D1 U s = E D + D1 D1 (3.33)
52
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Relaia (3.33) ne indic valoarea tensiunii de ieire n conducie ntrerupt. Dac perioada de conducie a tranzistorului este cunoscut, intervalul D1T, ce reprezint perioada de conducie a diodei, este necunoscut, ceea ce ne arat c relaia (3.33) nu este suficient pentru determinarea tensiunii de ieire a convertorului Boost n regim ntrerupt. Astfel pe intervalul de conducie al diodei curentul ce o strbate, este egal cu suma curenilor prin condensatorul de filtraj i sarcin. Dac ne raportm la un regim permanent de funcionare, componenta continu a curentului prin condensator este zero i astfel se poate exprima curentul de sarcin ca fiind valoarea medie a curentul prin diod pe o perioad de comutaie. iD T = U U U 1 1 1 E E I m ax D1 T = s D T D1 T = s D D1 T = s Rs T 2 L Rs Rs 2 2L (3.34)
Din relaia (3.34) i din relaia (3.33) putem scrie tensiunea de ieire a convertorului Boost n regim DCM de funcionare ca fiind: Us = Rs T T Rs 1 D2 E 2 U s2 U s E E 2 D2 Us E 2 L 2 L (3.35)
Soluiile ecuaiei de ordinul doi din relaia (3.35) sunt date de: E E 2 + 4 E 2 D2 U s1,2 = 2 RsT R T 1 1 + 4 D2 s 2L = E 2 L 2
(3.36)
Cum tensiunea de ieire a convertorului Boost trebuie s fie pozitiv, soluia tensiunii de ieire este soluia a crui numrtor este supraunitar, de unde se poate deduce i funcia de transfer n tensiune de forma: Us M= = E 1 + 1 + 4 D2 2 Rs T 2 L
(3.37)
Pentru a evidenia comportarea convertorului n regim CCM i DCM de funcionare, pe baza relaiilor (3.32) i (3.37), s-a reprezentat grafic variaia raportului de transfer n tensiune n funcie de variaia factorului de umplere i de variaia raportului 2 L , prezentat n figura 3.14 . Rs T
53
Modelarea convertoarelor n comutaie_______________________________________________
Figura 3. 14 Caracteristica de transfer n tensiune n funcie de factorul de umplere D i raportul 2L/RT
Figura 3.14 prezint variaia raportului de transfer n tensiune M n funcie de factorul de umplere al semnalului de comand D, pentru diferite valori ale raportului 2 L . Se poate observa Rs T
c valori mici ale raportului conduc la o caracteristic liniar, dar, spre deosebire de convertorul Buck, aceast caracteristic liniar, prezint regim de funcionare DCM, regim n care controlul asupra convertorului este uor de realizat. Dac ne raportm la condiia ce stabilete modul de funcionare a convertorului, CCM sau DCM, se poate observa c valoarea minim a raportului pentru care convertorul s funcioneze n mod CCM este n jurul valorii de 0,148, fapt evideniat i de figura 3.14, unde cu albastru s-a figurat curba D (1 D ) 2 , iar cu rou s-a impus un raport 2 L = 0.1 . Se poate observa c Rs T
interseciile dreptei raportului egal cu 0.1 cu curba D (1 D) 2 , delimiteaz regimul DCM, regim n care convertorul se controleaz uor dar riplul curentului prin bobin este mare. Figura 3.14 prezint de asemenea o particularitate a convertorului Boost, aceea c pentru un raport mai mic dect valoare de 0,148 n apropierea extremitilor intervalului variabilei D, convertorul poate s funcioneze i n regim CCM. Dintre avantajele pe care convertorul Boost le prezint, ar fi randamentul destul de ridicat, peste 87% i faptul c pe intervalul de conducie al tranzistorului sarcina este separat de sursa de alimentare. Un dezavantaj major l prezint rspunsul lent la tranziii, viteza de variaie a curentului de sarcin fiind limitat de prezena inductanei. 54
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 3. 15 Reprezentarea grafic a condiiei regimurilor de lucru
Schemele de principiu la care se reduce circuitul, precum i ecuaiile difereniale ce se pot scrie pentru fiecare interval de funcionare sunt prezentate n tabelul 3.3.
Tabel 3. 3 Ecuaiile difereniale i schemele echivalente ale convertorului Boost n intervalele de funcionare
Convertorul Boost model matematic diferenial Schema Ecuaii Intervalul I de funcionare: Tranzistorul conduce, dioda blocat. diL E dt = L du c = Us Rs C dt Intervalul II de funcionare: Tranzistorul blocat, dioda conduce. diL E U s dt = L duC = 1 iL U s dt C Rs Intervalul II de funcionare: Tranzistorul blocat, dioda blocat. diL dt = 0 du C = Us Rs C dt
55
Modelarea convertoarelor n comutaie_______________________________________________
3.1.3 Convertorul inversor (Buck-Boost)
Convertorul Buck-Boost se caracterizeaz prin faptul c produce la ieire o tensiune de polaritate invers tensiunii de intrare, cu particularitatea c valoarea absolut a tensiunii de ieire poate fi mai mare sau mai mic dect valoare tensiunii de intrare. Schema convertorului BuckBoost este prezentat n figura 3.16 i se poate obine prin conectarea n cascad a unui convertor Buck i a unui convertor Boost. Formele de und ale curentului i tensiunii pe bobina L, caracteristice celor dou regimuri de funcionare sunt prezentate n figura 3.17.[15]
Figura 3. 16 Schema de principiu a convertorului Buck-Boost
Figura 3. 17 Formele de und ale curentului i tensiunii pe bobina L caracteristice convertorului Buck-Boost
Pe durata de conducie a tranzistorului, [0-DT], dioda este blocat, inductana L nmagazineaz energie de la sursa de alimentare E, iar condensatorul se descarc pe rezistena de sarcin. Pe durata blocrii tranzistorului, datorit inversrii polaritii tensiunii de pe bobin, dioda intr n conducie, iar energia nmagazinat n bobin este cedat condesatorului de filtraj i circuitului de sarcin. Astfel, n regim CCM de funcionare, valoarea medie a tensiunii pe bobina L a convertorului este nul i putem exprima tensiunea la bornele de ieire ale convertorului i raportul de transfer n tensiune ca fiind: D U L = E D T U s (1 D) T = 0 U s = E 1 D M = U s = D E 1 D
(3.38)
56
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Variaia curentului prin bobin este: iL = I m ax I m in = E D T i deoarece curentul mediu prin L diod pe o perioad de comutaie este curentul de sarcin, se poate exprima valoarea minim a curentului, iar din condiia ca acesta s fie mai mare ca zero pentru obinerea regimul nentrerupt, rezult: Us E D T I L min = R (1 D) 2 L s 2 L (1 D) 2 Rs T
(3.39)
Dac condiia dat de relaia (3.39) nu este ndeplinit, convertorul funcioneaz n regim DCM, iar pe intervalul [D1T-T], aa cum se arat i n figura 3.16, valoarea curentului i a tensiunii pe bobina L a convertorului sunt egale cu zero. Exprimarea tensiunii de sarcin n acest regim de funcionare este greu de realizat avnd 3 intervale de funcionare din care, cunoatem, doar intervalul de timp n care tranzistorul conduce. O analiz a convertorului n regim DCM se poate face plecnd de la ipoteza unui convertor ideal n care puterea de intrare este egal cu puterea de ieire. Astfel valoarea curentului mediu absorbit de convertor de la sursa de alimentare, este egal cu valoarea medie a curentului ce trece prin tranzistor. Valoarea tensiunii de ieire precum i a factorului de transfer n tensiune sunt date n relaia (3.40). 1 E D2 T I m ed T = I m ax D T = 2 2 L 2 Us D 2 T Rs E2 = U s2 Pi = Po E I m ed = Rs 2 L T Rs U D U s = E D M = s = 2 L E 2 L Rs T
(3.40)
n figura 3.18 se prezint variaia raportului de transfer n tensiune n funcie de factorul de umplere D i raportul 2 L . Se poate observa c valori mici ale raportului impun o comportare n Rs T
regim DCM, dar caracteristica este liniar, ceea ce face convertorul mai uor de controlat. n tabelul 3.4 se prezint schemele echivalente la care se reduce convertorul n cele trei intervale distincte de funcionare, precum i ecuaiile matematice difereniale aferente intervalelor de funcionare.
57
Modelarea convertoarelor n comutaie_______________________________________________
Figura 3. 18 Variaia raportului de transfer n tensiune a convertorului Buck-Boost Tabel 3. 4 Ecuaiile difereniale i schemele echivalente ale convertorului Buck-Boost n intervalele de funcionare
Convertorul Boost model matematic diferenial Schema Ecuaii Intervalul I de funcionare: Tranzistorul conduce, dioda blocat. diL dt = E du s = us Rs C dt Intervalul II de funcionare: Tranzistorul blocat, dioda conduce. us diL dt = L dus = iL us 1 dt Rs C Intervalul II de funcionare: Tranzistorul blocat, dioda blocat. diL dt = 0 du s = us Rs C dt Principalul avantaj al acestui convertor const n obinerea polaritii inverse a tensiunii de ieire fa de tensiunea de intrare i obinerea unei tensiuni mai mici sau mai mari dect valoarea la care a fost alimentat. Ca dezavantaj major l constituie solicitarea tranzistorului, care la blocare suport suma tensiunilor de intrare i de ieire, iar n conducie, curentul de colector este foarte mare. 58
Universitatea Tehnic din Cluj-Napoca_______________________________________________
3.1.4 Platform Matlab de simulare i proiectare a convertoarelor n comutaie fr separare galvanic
Pornind de la ecuaiile matematice ce descriu funcionarea convertoarelor prezentate anterior, s-a implementat o platform Matlab de simulare i proiectare a acestor tipuri de convertoare c.c.-c.c. fr separare galvanic [13]. Platforma Matlab implementat permite selectarea tipului de convertor (Buck, Boost, Buck-Boost), modul de funcionare (CCM, DCM), precum i regimul de vizualizare a formelor de und (tranzitoriu sau permanent), dispunnd de o interfa grafic n care se permite modificarea parametrilor convertorului cu care se dorete a fi rulat simularea. De asemenea platforma returneaz valorile mrimilor de interes cum ar fi valorile bobinei i condensatorului, sau ale factorului de umplere i returneaz grafic formele de und ale curentului prin bobina convertorului i a tensiunii pe condensator reprezentnd i forma puterii ca produsul dintre tensiunea de sarcin i curentul de sarcin. Structura acestei platforme are la baz ase fiiere distincte de lucru, care se apeleaz ntre ele n scopul rezolvrii problemei propuse. Organigrama de funcionare a acestei platforme este prezentat n figura 3.18, iar n anexele lucrrii sunt prezentate fiierele implementate.
Figura 3. 19 Organigrama platformei Matlab
59
Modelarea convertoarelor n comutaie_______________________________________________
Fiierul Start este fiierul de iniializare a unor valori elementare de simulare i fiierul cu care aplicaia se lanseaz. Acest fiier apeleaz fiierele Calcule (fiier ce calculeaz i dimensioneaz componentele n funcie de modul de lucru specificat i de datele de intrare introduse n fisierul Interfa), Interfaa (fiier ce returneaz interfaa grafic a utilizatorului din care se permite introducerea datelor de intrare cum ar fi: valoarea tensiunii de alimentare a convertorului, valoarea curentului de sarcin, frecvena de lucru a convertorului, riplul maxim admis al tensiunii de ieire i al curentului prin bobina L, modul de lucru n care se dorete a fi rulat simularea CCM sau DCM, regimul de vizualizare a formelor de und, etc. n interfaa grafic, se returneaz valorile calculate ale componentelor circuitului, pentru datele de intrare specificate), Rezolvare_ode (fiier ce are nglobat algoritmul de funcionare al convertorului) n scopul returnrii valorilor componentelor i afirii formelor de und caracteristice fiecrui convertor. Fiierul Difereniale cuprinde ecuaiile difereniale a convertoarelor, iar n fiierul Detectare, se detecteaz momentele n care curentul prin bobin ajunge la valoarea zero, returnnd aceast informaie fiierului Rezolvare_ode. n vederea simulrii convertoarelor cu platforma Matlab implementat se propun dou seturi de valori, iar convertorul este selectat pentru a funciona att n regim CCM de funcionare ct i n regim DCM de funcionare. n subcapitolele urmtoare se prezint rezultatele simulrilor convertoarelor fr separare galvanic realizate cu ajutorul acestei platforme, i se prezint rezultatele returnate n urma simulrii.
3.1.4.1 Simulrile convertorului Buck n regim CCM i DCM de funcionare.
Tabel 3. 5 Datele de intrare ale convertorului Buck
Setul 1 de valori Tensiunea de alimentare Tensiunea de ieire Variaia tesiunii de ieire Curentul de sarcin Variaia curentului de sarcin Frecvena de lucru 15 V 7,5 V 800 mV 1A 20% 20 kHz
Setul 2 de valori 15 V 10 V 900 mV 3A 50% 80 kHz
60
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 3. 20 Simulare cu platforma Matlab a convertorului Buck n modul CCM regim tranzitoriu i permanent pentru setul 1 de valori
Figura 3. 21 Simulare cu platforma Matlab a convertorului Buck n modul DCM regim tranzitoriu i permanent pentru setul 1 de valori
61
Modelarea convertoarelor n comutaie_______________________________________________
a) b) Figura 3. 22 Simulare cu platforma Matlab a convertorului Buck pentru setul 2 de valori n regim permanent; a) modul CCM; b) modul DCM Tabel 3. 6 Datele de ieire pentru convertorul Buck pe care platforma le returneaz
Setul 1 CCM Curentul Maxim Curentul Minim Inductana minin Inductana convertorului Condensatorul de filtraj Factorul de umplere 1,2 A 0,8 A 93,75 uH 468,75 uH 3,125 uF 50% DCM 2,58 A 0A 93,75 uH 56 uH 26 uF 38,7% CCM 4,5 A 1,5 A
Setul 2 DCM 8,48 A 0A 6,944 uH 3,472 uH 20 uF 47,1%
6,944 uH 13,88 uH 5,208 uF 66,6%
Figurile 4.20:4.32 ilustreaz rezultatele obinute n urma simulrii convertorului pentru valorile din tabelul 3.5 n regim CCM i DCM de funcionare. Valorile componentelor convertorului, care satisfac datele de intrare sunt prezentate n tabelul 3.6. Ecuaiile de dimensionare a componentelor convertorului sunt date de urmtoarele relaii, unde D este factorul de umplere cu care se comand tranzistorul la frecvena de comutaie fcom . Valoarea bobinei minime astfel nct convertorul s funcioneze la grania conduciei continue i ntrerupte este dat de relaia: Lmin = 1 Rs (1 D) 2 f com (3.41)
62
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Valoarea bobinei convertorului n regim de conducie continu pentru limitarea riplului curentului de sarcin este dat de:
L=
, unde i = I s max I s min i
E D (1 D) i f com
(3.42)
I s max = I s , I s min = I s (2 ) , iar reprezint o valoarea n
domeniul (1.1 1.9 ) , astfel nct riplul curentului prin bobin s poat fi setat ntre 10 i 90%. n modul de conducie discontinu, valoarea bobinei convertorului este dat de relaia (3.43), unde parametrul a=0,2:0,9 reprezint o valoare n procente din bobina minim calculat. L = a Lmin (3.43)
Condensatorul de filtraj este dat de relaia (3.44) i se observ c, dimensionarea acestuia depinde de frecvena de lucru a convertorului: C= ( E U s ) U s 2 8 E L f com U s (3.44)
n regim DCM factorul de umplere poate fi determinat din relaia (3.45), unde cu D ' s-a notat factorul de umplere exprimat n conducie nentrerupt. D = D' 2 L f com Rs (1 D ' ) (3.45)
3.1.4.2 Simulrile convertorului Boost n regim CCM i DCM de funcionare.
Tabel 3. 7 Datele de intrare ale convertorului Boost
Tensiune de alimentare Tensiune de ieire Variaia tensiunii de ieire Curentul de sarcin Riplul curentului prin bobin Frecvena de comutaie
Setul 1 de valori 10 16 800 mV 4A 10% 20 kHZ
Sedul 2 de valori 10 40 1,5 V 2A 20% 80 kHz
63
Modelarea convertoarelor n comutaie_______________________________________________
Figura 3. 23 Simulare cu platforma Matlab a convertorului Boost n modul CCM regim tranzitoriu i permanent pentru setul 1 de valori
Figura 3. 24 Simulare cu platforma Matlab a convertorului Boost n modul DCM regim tranzitoriu i permanent pentru setul 1 de valori
64
Universitatea Tehnic din Cluj-Napoca_______________________________________________
a) b) Figura 3. 25 Simulare cu platforma Matlab a convertorului Boost pentru setul 2 de valori n regim permanent; a) modul CCM; b) modul DCM Tabel 3. 8 Datele de ieire pentru convertorul Boost pe care platforma le returneaz
Setul 1 Curent maxim n bobin Curentul minim n bobin Inductana minim Inductana convertorului Condensatorul de filtraj Factorul de umplere CCM 6,8 A 6A 14,64 uH 234,375 uH 93,75 uF 37,5 % DCM 19,081 A 0 6,591 uH 93,75 uF 25,15 %
Setul 2 CCM 8,4 A 7,6 A 5,85 uH 117,188 uH 12,5 uF 75 % DCM 25,29 A 0 2,343 uH 12,5 uF 47,43 %
Relaiile matematice de dimensionare a componentelor convertorului Boost utilizate n platforma Matlab sunt prezentate n cele ce urmeaz, pornind de la dimensionarea bobinei convertorului astfel nct acesta s funcioneze la grania celor dou regimuri de lucru CCM i DCM, dat de relaia: Lmin = Rs D (1 D 2 ) 2 f com (3.46)
n conducie continu bobina de lucru a convertorului poate fi determinat cu relaia: L=
(U s E ) E
U s f com i
(3.47)
65
Modelarea convertoarelor n comutaie_______________________________________________
Variaia curentului prin bobin se determin din relaia (3.48), iar curentul maxim din relaia (3.49). Cum variaia curentului prin bobin este egal cu diferena dintre curentul maxim i curentul minim, valoarea curentului minim este uor de calculat avnd cele dou relaii . i = 2 ( 1) I s i = I m ax I m in I m ax = Is i + 1 D 2 (3.48)
(3.49)
n regim de curent ntrerupt tensiunea de ieire este dat de relaia (3.50), iar factorul de umplere D este exprimat ca fiind (3.51). 1 R D2 U s = + 0, 25 + s 2 2 L f com D = 2 L U s Us E Rs E 2 T E (3.50)
(3.51)
Valoarea maxim a curentului prin tranzistor, precum i valoarea maxim a curentului prin diod satisfac urmtoarea relaie: IT , D = I s Us E E + 1 E 2 L f com U s (3.52)
3.1.4.3 Simulrile convertorului Buck-Boost n regim CCM i DCM de funcionare.
Tabel 3. 9 Datele de intrare ale convertorului Buck-Boost
Tensiune de alimentare Tensiune de ieire Variaia tensiunii de ieire Curentul de sarcin Riplul curentului prin bobin Frecvena de comutaie
Setul 1 de valori 20 40 V 800 mV 3A 10% 40 kHZ
Sedul 2 de valori 20 5V 400 mV 7A 40% 20 kHz
66
Universitatea Tehnic din Cluj-Napoca_______________________________________________
a)
b)
Figura 3. 26 Simulare cu platforma Matlab a convertorului Buck-Boost n modul a) CCM i b) DCM regim permanent pentru setul 1 de valori
a) b) Figura 3. 27 Simulare cu platforma Matlab a convertorului Buck-Boost pentru setul 2 de valori n regim permanent; a) modul CCM; b) modul DCM Tabel 3. 10 Datele de ieire pentru convertorul Buck-Boost pe care platforma le returneaz
Curent maxim prin bobin Curentul minim prin bobin Inductana minim Inductana convertorului Condensatorul de filtraj Factorul de umplere
Setul 1 CCM DCM 9,3 A 18,97 A 8,7 A 0 22,34 uH 555,5 uH 16,3 uH 62,5 uF 59,29 uF 66 % 63 %
Setul 2 CCM DCM 11,55 A 22,59 A 5,95 A 0 2,28 uH 11,42 uH 35,7 uH 6,85 uH 175 uF 135 uF 20 % 15 % 67
Modelarea convertoarelor n comutaie_______________________________________________
Ecuaiile de dimensionare a componentelor convertorului inversor pe care platforma Matlab implementat le utilizeaz n timpul simulrii, att n regim nentrerupt ct i n regim ntrerupt de funcionare, sunt prezentate n cele ce urmeaz. Valoare minim a bobinei convertorului pentru ca acestea s funcioneze la grania dintre cele dou regimuri de funcionare este determinat cu ajutorul relaiei (3.53), orice valoare a bobinei mai mic dect valoarea rezultat din aceast relaie face ca funcionarea convertorul s fie n regim DCM. Lmin Rs D (1 D 2 ) = f com i (3.53)
Valoarea optim a bobinei convertorului pentru regimul CCM este exprimat de relaia:
Us E U +E L= s f com i
(3.54)
Variaia tensiunii de ieire este asigurat de o dimensionare corect a condensatorului de filtraj. O valoare corect a condensatorului se poate determina din relaia matematic dat de formula (3.55).
U s2 E +Us C= R U f com
(3.55)
Curentul prin tranzistor se poate determina aplicnd relaia (3.56) att n regim CCM ct i n regim DCM de funcionare.
U IT = I s 1 + s E Us E + 2 L f U + E com s
(3.56)
Avantajul implementrii i utilizrii unei astfel de platforme const n rapiditatea timpului de calcul asupra dimensionrii componentelor unui convertor n comutaie fr separare galvanic. Odat ce ecuaiile matematice au fost implementate i algoritmul de control a fost realizat, se poate simula oricare din cele trei convertoare prezentate anterior n orice regim de funcionare i cu orice valori, fr a fi necesar o redesenare a convertorului sau o adugare de linii de cod. n acelai timp, returnarea formelor de und, face posibil o analiz asupra funcionrii convertorului pentru valorile de intrare impuse. Totodat utilizarea unei astfel de platforme n mediul educaional ajut studenii s nteleag funcionarea acestor convertoare pe baza ecuaiilor matematice pe care le descriu n timpul funcionrii lor.
68
Universitatea Tehnic din Cluj-Napoca_______________________________________________
3.2 Convertoare CC-CC cu separare galvanic
3.2.1 Convertorul Forward
Convertorul Forward este un convertor c.c-c.c. ce ofer o izolare ntre intrarea i ieirea sa, fiind format dintr-un etaj de izolare cu transformator i un convertor Buck, din care este derivat. Schema de principiu a convertorului forward este prezentat n figura 3.28, unde se evideniaz cele dou componente inductive, transformatorul cu rol de separare galvanic ntre intrarea i ieirea convertorului forward, permind totodat i obinerea unor tensiuni mai mari dect tensiunea de alimentare a convertorului i bobina L pentru stocarea energiei.[12]
Figura 3. 28 Schema de principiu a convertorului Forward
Principiul de funcionare a convertorul Forward este foarte asemntor cu convertorul Buck din care este derivat. Pe durata de conducie a tranzistorului, curentul de magnetizare crete liniar stocndu-se astfel energie n miezul transformatorului. Cnd tranzistorul se blocheaz, trebuie asigurat o cale pentru scurgerea curentului de magnetizare, altfel apar vrfuri de tensiune ce pot distruge tranzistorul. Una din cele mai utilizate soluii pentru eliminarea acestei probleme const n includerea unei nfurri suplimentare n3 ca n figura 3.28. Aceast nfurare trebuie s fie strns cuplat cu nfurarea primar pentru a elimina vrfurile de tensiune ce apar pe tranzistor cnd acesta se blocheaz, astfel limitnd tensiunea pe tranzistor la o valoare dubl fa de tensiunea de intrare atunci cnd numrul de spire al nfurrii unu este egal cu numrul de spire al nfurrii trei. Aceste ipoteze fac ca factorul de umplere al tensiunii de comand s se limiteaz la o valoare ce nu poate depi 50%, pentru a preveni saturaia miezului. Pentru simularea i reprezentarea grafic a formelor de und caracteristice acestui convertor cu ajutorul unei platforme Matlab, este necesar scrierea ecuaiilor difereniale care descriu funcionarea convertorului, pentru a putea fi rezolvate cu ajutorul funciilor ode45 din Matlab. Schema convertorului Forward modelat n platforma Matlab este prezentat n figura 3.29, iar intervalele de funcionare au fost alese n funcie de strile de conducie i blocare a tranzistorului. Modelul transformatorului are la baz modelul prezentat n capitolul anterior, dar este evideniat cea de-a treia nfurare a transformatorului i bobina de magnetizare LM n paralel cu acesta.
69
Modelarea convertoarelor n comutaie_______________________________________________
Figura 3. 29 Schema convertorului Forward implementat n platforma Matlab
Un prim interval de funcionare a convertorului este descris de conducia tranzistorului. Cnd tranzistorul conduce dioda D1 fiind polarizat invers este blocat, astfel curentul de magnetizare crete liniar. Dioda D2 este polarizat direct i conduce, curentul prin bobin crete liniar iar dioda D3 fiind polarizat invers este blocat. Schema echivalent a circuitului pentru acest interval este prezentat n figura 3.30, iar ecuaiile matematice sunt date de relaia (3.57).
Figura 3. 30 Schema echivalent a convertorului Forward pentru primul interval de funcionare
di1 M (us + Rs i2 ) ( Lp ( L + Ls )) ( E R p i1 ) = L p ( Ls + L) M 2 dt di L (u + Rs i2 ) M ( E R p i1 ) 2 = p s L p ( Ls + L) M 2 dt E diM = LM dt di Ls E u L = LM iM s Lp L L dt dus = iL us dt C R C
(3.57)
, unde cu i1 s-a notat curentul din primarul transformatorului, cu i2 curentul din secundarul transformatorului, iM curentul de magnetizare ce strbate bobina LM, Lp, Rp reprezint valoarea inductanei i a rezistenei primarului, Ls, Rs reprezint valoarea inductanei i a rezistenei
70
Universitatea Tehnic din Cluj-Napoca_______________________________________________
secundarului, iL reprezint curentul prin bobina L a convertorului, us este tensiunea de ieire, iar inductana mutual M i inductana de magnetizare sunt date de:
M = k Lp Ls Lp LM = M Ls
(3.58)
Cnd tranzistorul se blocheaz, tensiunile pe nfurrile transformatorului i schimb polaritatea. Dioda D1 se deschide i curentul de magnetizare circul prin nfurarea auxiliar asigurnd astfel demagnetizarea transformatorului i totodat transferul de energie nspre intrare. Dioda D2 este blocat datorit polaritii tensiunii din secundar iar dioda D3 se deschide asigurnd astfel o cale pentru curentului acumulat n bobina L. Schema echivalent a convertorului caracteristic acestui interval de funcionare devine:
Figura 3. 31 Schema echivalent a convertorului Forward pentru al doilea interval de funcionare
Ecuaiile matematice ce se pot scrie pe acest interval de funcionare sunt date de: di1 E R p i1 = Lp dt di L (u + Rs i2 ) M ( E R p i1 ) 2 = p s Lp ( Ls + L) M 2 dt E diM = LM dt diL u = s L dt dus iL u = s dt C R C
(3.59)
Un al treilea interval de funcionare al convertorului Forward apare atunci cnd curentul de magnetizare atinge valoarea zero nainte ca tranzistorul s intre din nou n starea de conducie. Acest interval este caracterizat prin faptul ca tranzistorul, dioda D2 i dioda D1 sunt blocate. Dioda
71
Modelarea convertoarelor n comutaie_______________________________________________
D3 ramne deschis asigurnd calea de nchidere a curentului din bobina L, iar curentul de magnetizare iM rmne la valoarea zero pentru a compensa perioada de comutaie. Schema echivalent a convertorului pentru acest interval este prezentat n figura 3.32, iar relaiile matematice n (3.60).
Figura 3. 32 Schema echivalent a convertorului Forward pentru intervalul al treilea de funcionare
di1 dt = 0 di2 L p (us + Rs i2 ) M ( E R p i1 ) dt = L p ( Ls + L) M 2 diM =0 dt us diL dt = L dus = iL us dt C R C
(3.60)
Pe baza ecuaiilor difereniale prezentate anterior s-a implementat o platform Matlab de simulare a convertorului, ce permite utilizatorului introducerea parametrilor convertorului i returneaz formele de und caracteristice valorilor introduse. Parametri ce pot fi modificai n aceast platform sunt mprii n trei casete dup cum urmeaz: Date de intrare, unde se introduc valorile tensiunii de alimentare, frecvena de lucru a tranzistorului, factorul de umplere sau numrul de perioade de vizualizare; Transformator, caseta de editare a valorilor transformatorului ce permite modificarea inductanei i rezistenei primarului Lp, Rp, inductanei i rezistenei secundarului Ls, Rs, inductanei nfurrii trei L3 i factorul de cuplaj ntre primar i secundar k; Parametri circuit, unde utilizatorul modific valoarea rezistenei de sarcin, a bobinei de lucru sau a condensatorului de filtraj. Formele de und pe care platforma le returneaz sunt tensiunea de ieire, curentul de sarcin, puterea total, tensiunea pe tranzistor, curentul de dren i curentul de magnetizare i calculeaz inductana mutual, inductana de magnetizare i raportul de transformare al transformatorului. Rezultatele obinute n urma simulrilor pentru valorile prezentate n tabelul 3.11 sunt ilustrate n figurile urmtoare.[19]
72
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Tabel 3. 11 Datele de intrare pentru convertorul Forward
Tensiunea de intrare Frecvena de comutaie Factorul de umplere Inductana primarului Inductana secundarului Factorul de cuplaj Rezistena de sarcin Bobina de lucru Condensatorul de filtraj
100 V 40 kHz 40% 0,095 H 0,005 H 0,98 10 0,0008 H 1 uF
Figura 3. 33 Rezultatele obinute n urma simulrii convertorului Forward n regim tranzitoriu i permanent
a)
b)
Figura 3. 34 Simulare cu platforma Matlab a convertorului Forward n regim permanent: a) cu nfurarea 3 diferit de nfurarea 1; b) cu raport de transformare de 2.29
73
Modelarea convertoarelor n comutaie_______________________________________________
Figura 3. 35 Simulare cu platforma Matlab a convertorului Forward n regim permanent cu factor de umplere de 70% cu nfurrile unu i trei egale
Figurile 3.33:3.35 prezint rezultatele simulrii cu platforma Matlab implementat asupra convertorului Forward. n figura 3.33 sunt prezentate formele de und caracteristice setului de valori impus. Figura 3.34 scoate n eviden comportarea convertorului atunci cnd nfurarea 3 a transformatorului, este diferit de nfurarea 1. n figura 3.35 se prezint aspectul negativ al comportrii convertorului, cauzat de un factor de umplere peste valoarea de 50%. Se observ c valoarea curentului de magnetizare tinde la infinit. Aadar, privind figurile 3.34 i 3.35 i comparnd rezultatele cu studiul teoretic care relev aceste aspecte, se poate afirma c platforma Matlab a fost bine implementat urmrind s simuleze comportarea convertorului din toate punctele de vedere. Tensiunea de ieire a convertorului este dat de relaia (3.61), iar variaiile tensiunii de ieire se pot exprima pe baza relaiei (3.63).
Us = E
Ls D Lp
(3.61)
us =
E D (1 D) 8 f com 2 L C
Ls Lp
(3.62)
Astfel pentru setul de valori impus iniial la simularea convertorului un calcul al variaiei tensiunii de sarcin ne duce la valoare de 56mV, iar n platforma Matlab se obine n regim permanent aceai valoare. Pentru validarea acestei platforme s-a trecut la simularea convertorului
74
Universitatea Tehnic din Cluj-Napoca_______________________________________________
cu ajutorul unui soft specializat pentru convertoarele n comutaie, iar o comparare a valorilor obinute este prezentat n tabelul urmtor.
Tabel 3. 12 Valorile obinute n urma simulrii convertorului Forward
Matlab Tensiunea de ieire [V] Tensiunea maxim pe tranzistor [V] Curentul de ieire [A] Curentul de magnetizare [A] Puterea [W] 9,2 200 0,9 0,005 8,5
Spice 9,8 500 0,93 0,006 9,1
Avantajul major al simulrii convertorului Forward cu ajutorul acestei platforme const n rapiditatea timpului de returnare a valorilor de interes i a reprezentri formelor de und, ce pot fi vizualizate att n regim tranzitoriu ct i n regim permanent. Odat ce codul Matlab a fost implementat i platforma validat, se poate utiliza platforma n proiectarea convertoarelor de tip forward i n simulrile acestui convertor.
3.2.2 Convertorul Flyback
La fel ca i convertorul Forward, convertorul Flyback este un convertor c.c.-c.c. ce ofer izolare ntre intrare i ieire i funcioneaz n mod asemntor convertorului Buck-Boost, cu deosebirea c circuitul magnetic este format dintr-un transformator cu nfurarea secundar bobinat n sens opus fa de nfurarea primar, folosit n general la puteri relativ mici pn la 200W (datorit volumului mare al transformatorului necesar la puteri mari)[5][9][12]. Schema de principiu a convertorului Flyback este prezentat n figura 3.36, unde se evideniaz prezena transformatorului ce ndeplinete funcia de dispozitiv de nmagazinare a energiei, iar ca un avantaj asupra convertorului Forward am putea preciza prezena unui singur element inductiv.
Figura 3. 36 Schema de principiu a convertorului Flyback
75
Modelarea convertoarelor n comutaie_______________________________________________
Analiza convertorului Flyback pornete de la strile de conducie i blocare ale tranzistorului i, la fel ca i la convertoarele prezentate anterior, permite modelarea funcionrii n regim de conducie nentrerupt, ct i n regim de conducie ntrerupt. Astfel pe durata de conduciei a tranzistorului, dioda este blocat i ntreaga energie este stocat n primarul transformatorului. Relaiile matematice ale curentului prin bobina L i ale tensiunii pe condensator, ce se pot deduce pentru acest interval de funcionare sunt date de:
E diL dt = L s L Lp du uc c = ( R + Rc ) C dt
(3.63)
, unde cu Lp i Ls s-a notat inductana primarului, respectiv a secundarului transformatorului, iar cu Rc rezistena serie a condensatorului. n momentul n care tranzistorul se blocheaz, tensiunea pe nfurrile transformatorului se inverseaz i astfel dioda intr n conducie, energia stocat n intervalul anterior n primar fiind acum transmis sarcinii. Ecuaiile matematice ce descriu variaia curentului prin bobin i a tensiunii pe condensator, ce se pot deduce pentru acest interval de funcionare sunt exprimate n relaia (3.65). uc + Rc iL R diL dt = R + R L c duc = R iL uc dt ( R + Rc ) C
(3.64)
Cele dou situaii prezentate anterior caracterizeaz regimul CCM de funcionare n care valoarea curentului n secundarul transformatorului nu atinge valoarea zero. Tensiunea la ieirea convertorului se poate exprima ca fiind: us = E D Ls 1 D Lp (3.65)
, iar curentul de sarcin care reprezint valoarea medie a curentului prin diod este dat de: Is = I L max + I L min (1 D) f com 2 (3.66)
Funcionarea n regim de conducie ntrerupt duce la apariia unui nou interval caracterizat de atingerea valorii de zero a curentului prin bobin. n acest interval, cele dou comutatoare,
76
Universitatea Tehnic din Cluj-Napoca_______________________________________________
tranzistorul i dioda, sunt blocate, astfel curentul din secundarul transformatorului este zero. Ecuaiile matematice ce se pot deduce pentru acest interval sunt: diL dt = 0 du uc c = ( R + Rc ) C dt
(3.67)
Valoarea tensiunii de ieire a convertorului Flyback, n regim DCM de funcionare se poate exprima ca fiind:
D ' = D u = D ' s
0.5 T E Ls Lp
R L (3.68)
Pentru simularea acestor convertoare s-a implementat o platform Matlab ce permite vizualizarea formelor de und caracteristice convertorului cum ar fi: curentul n primar, curentul n secundar, tensiunea de sarcin, tensiunea pe tranzistor i care ofer utilizatorului posibilitatea de a modifica valorile componentelor convertorului. Rezultatele obinute sunt prezentate n figurile urmtoare, iar structura i fiierele platformei Matbal sunt prezentate n anexe.
a)
b)
Figura 3. 37 Simulare convertor Flyback cu platforma Matlab implementat; a) la pornire 5 perioade, b) regim tranzitoriu
77
Modelarea convertoarelor n comutaie_______________________________________________
Figura 3. 38 Simulare convertor Flyback n regim permanent
Figurile 3.37 i 3.38 prezint rezultatele obinute n urma simulrii convertorului Flyback cu platforma Matlab implementat. Odat ce ecuaiile difereniale deduse au fost rezolvate platforma returneaz formele de und ale curenilor prin transformator i ale tensiunii pe sarcin i tranzistor. Totodat se returneaz valoarea maxim a curentul n primar i valoarea tensiunii la ieirea convertorului, precum si valorile inductanei de magnetizare Lm ori a inductanei mutuale M.
3.3 Concluzii i contribuii personale
n acest capitol s-a realizat un studiu asupra convertoarelor CC-CC cu i fr izolare pentru a scoate n eviden comportarea acestora att n regim de funcionare de curent ntrerupt ct i n regim de funcionare de curent nentrerupt. Astfel, convertoarele CC-CC far izolare pot furniza la ieirea lor, n funcie de topologia aleas, o tensiune de valoare mai mare sau mai mic dect valoarea la care sunt alimentate, sau o tensiune de polaritate diferit polaritii tensiunii de intrare. n general aceste tipuri de convertoare sunt simple i se bazeaz pe un singur comutator ce poate fi controlat, fie un tranzistor MOS fie un IGBT. Din punct de vedere al randamentului, convertoarele fr izolare prezint un randament ridicat, att n regim CCM ct i n regim DCM.
78
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Convertoarele CC-CC cu izolare ntre intrarea i ieirea lor, Forward i Flyback, sunt destinate n general n sfera puterilor de pna la 300W, acolo unde se impune o valoare ridicat a tensiunii de ieire stabilizat i un curent de ieire de valori mici. Ca un dezavantaj al acestor convertoare l constituie transformatorul, care devine mai voluminos pe msur ce puterea la ieirea convertorului crete. La fel ca n cazul convertoarelor fr separare aceste convertoare funcioneaz att n regim de curent nentrerupt, ct i n regim de curent ntrerupt asigurnd izolarea sarcinii de sursa de alimentare a convertorului. Din punct de vedere a strategiilor de comand i control ce se impun asupra acestor convertoare, n momentul actual sunt disponibile procesoare dezvoltate numai pentru aplicaii din electronica de putere, prevzute cu module PWM care permit controlul acestor convertoare n funcie de bucla de reglaj ce se dorete a fi nchis. Astfel prin aplicarea unui algoritm de control adecvat convertorului, se pot reduce timpii regimului tranzitoriu i se pot mbunti performanele regimului staionar. Contribuiile personale ale autorului n acest capitol constau n: realizarea unei platforme Matlab de simulare a convertoarelor Buck n bucl nchis implementarea unui algoritm de control a convertorului Buck n bucl nchis utiliznd controlerul C508, pe baza rezultatelor obinute n urma simulrilor Matlab analiza matematic a convertoarelor CC-CC n funcie de regimul de funcionare. analiza matematic a convertorului Boost n regim staionar, pentru determinarea valorilor tensiunii de sarcin i curentului prin bobin implementarea unei platforme Matlab de simulare i proiectare a convertoarelor CC-CC fr separare ntre intrare i ieire analiza matematic i simularea cu ajutorul unei platforme Matlab a convertorului Forward cu transformator cu trei nfurri analiza i simularea convertorului Flyback n Matlab pe baza ecuaiilor difereniale deduse pentru intervalele de funcionare
79
Modelarea convertoarelor n comutaie_______________________________________________
3.4 Bibliografie selectiv
[1] J. G. Kassakian Principles of Power Electronics, Addison-Wesley Publishing Co.,1991. [2] , S. Erickson, R. W. Power source element and its properties, IEE Proceedings-Circuits Devices Sysatems, vol.141, no.3, pp. 220-226, June 1994. [3] M.H. Rasid Power Electronics-Circuits, Devices and application, Prentice Hall, Englewood Cliffs, New Jersey, Second Edition. [4] Chen J., Erickson R., Maksimovic D. Averaged Switch Modeling of Boundary Conduction Mode DC-to-Dc Converters, Proc. IEEE Industrial Electronics Society Annual Conference (IECON 01), Nov.2001 [5] Erickson R.- Dc-Dc Power Converters, tutorial article in Wiley Enciclopedia of Electrical and Electronics Engineering, 1998. [6] Lungu S., Pop Ovidiu, Plesa S.- Spice Model for Zero Current Switching Quasi-Resonant Buck Convertor, Acta Tehnica Napocensis, vol37, nr.2, Cluj-Napoca, 1998. [7] Lungu S., Pop Ovidiu, Chindris G. Educational Platform for Modeling of Zero-Voltage Switching Quasi-Resonant Boost onverters, ISSE 04, Sofia, Bulgaria, 2004 [8] V. Popescu,D. Lascu, D. Negoitescu Surse de alimentare in telecomunicatii, Editura de Vest Timisoara, 2002, ISBN 973-36-0365-1 [9] D. Petreus, S. Lungu Surse in comutatie, Indrumator de laborator, Editura Mediamira ClujNapoca, 1999, ISBN 973-9358-32-2 [10] Bengt Johansson Improved models for DC-DC converters, Media-Tryck Sweden, 2003, ISBN 91-88934-29-2 [11] Keith Billings Switchmode power supply handbook, McGraw-Hill Companies, 1999, ISBN13: 978-0-07-006719-6, ISBN-10: 0-07-006719-8 [12] Robert W. Erickson, Dragan Maksimovic Fundamentals of power electronics second edition, Library of Congress, 2001, ISBN 0-7923-7270-0 [13] S. Lungu, O. Pop Modelarea circuitelor electronice, Editura Casa Cartii de Stiinta ClujNapoca, 2006, ISBN (10) 973-686-975-X; ISBN (13) 978-973-686-975-4 [14] Ron Lenk Practical design of power supplies, IEEE Press, ISBN 0-7803-3458-2 [15] D. Petreus Electronica surselor de alimentare, Editura Mediamira Cluj-Napoca, 2002, ISBN 973-9358-92-6
80
Universitatea Tehnic din Cluj-Napoca_______________________________________________
[16] Adrian TAUT, Alin GRAMA, Ovidiu POP, Serban LUNGU Power Converters Study Regarding the ESR of an SUPERCAPACITOR, 15th International Symposium for Design and Technology of Electronics Packages SIITME, 17-20 septembrie 2009, Gyula, Ungaria, Issue 1, Conference Proceedings CD, ISBN: 978-1-4244-50330309. [17] Adrian TAUT, Serban LUNGU, Ovidiu POP Educational Platform for Cloased-loop Simulation of Power Converters, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic [18] Adriana Buruian, Adrian TAUT, Ovidiu Pop, Anamaria Matei, Digital Control Algoritm for DC-DC Converter, The 6TH Symposium for Students in Electronics and Telecomunications, 27 May 2010, Cluj-Napoca, Romnia. [19] A Taut, O. Pop, A . Grama, S. Lungu Educational Matlab tool for simulating of Forward Converters, 34th International Spring Seminar on Electronics Technology, Slovakia, Mai 11-15 [20] R Sheffer, Fundamentals of Power Electronics with Matlab, ISBN 1-58450-852-3 [21] K. M. Daugherty , Analog-to-Digital Conversion , McGraw-Hill , ISBN 0-07-015675-1 [22] E. Fossas , G. Olivar , Study of Chaos in the Buck Converter , IEEE Transaction on Circuits and Systems-I: Fundamental Theory and Applications, vol. 43, no 1 January 1996 [23] Infineon Technologies, C508 8-Bit CMOS Microcontroller. Users Manual, May 2001 [24] ***L296***DataSheet
81
Modelarea convertoarelor n comutaie_______________________________________________
4 Analiza, modelarea matematic, simularea i implementarea convertoarelor c.c.-c.a.
Convertoarele c.c.-c.a, demunite i invertoare, reprezint o categorie de circuite electronice de putere, prin care se controleaz puterea ntr-o sarcin de curent alternativ. Aceste invertoare transform o surs de tensiune (sau curent) continu ntr-o surs de tensiune (sau curent) alternativ, de amplitudine sau/i frecven variabil. O clasificare a invertoarelor se poate face pe baza mai multor criterii, astfel[1][2]: a) dup numrul de faze al semnalului de ieire: monofazat invertoare monofazate trifazat invertoare trifazate
b) dup natura circuitului de alimentare i dup natura comutat n circuitul de ieire invertoare de tensiune sunt cele alimentate de la o surs de tensiune continu, mrimea comutat n circuitul de ieire fiind tensiunea, iar forma curentului este impus de sarcin invertoare de curent sunt cele alimentate de la o surs de curent continuu, mrimea comutat n circuit fiind curentul, iar forma tensiunii este impus de sarcin - invertoarele de tensiune alimenteaz receptoare de curent - invertoarele de curent alimenteaz receptoare de tensiune, pentru c sursa i receptorul (sarcina) trebuie s fie de naturi diferite c) dup forma de und la ieire invertoarele cu semnal dreptunghiular invertoarele cu semnal dreptunghiular modulat n durat invertoare cu semnal sinusoidal invertoare cu semnal sintetizat care aproximeaz sinusoida prin trepte
d) dup modul de comand invertoare comandate cu und plin invertoare comandate pe principiul modulrii n durat a impulsurilor de comand PWM (Pulse Width Modulation) 82
Universitatea Tehnic din Cluj-Napoca_______________________________________________
4.1 Invertoare de tensiune cu tensiune dreptunghiular la ieire
Invertoarele cu tensiune dreptunghiular la ieire sunt utilizate n convertoare cu faz intermediar de tensiune continu sau pentru alimentarea sarcinilor care suport armonici de rang ridicat. Pentru sarcinile care cer o alimentare de calitate, obinerea tensiunii sinusoidale la ieire se realizeaz printr-un filtru "trece jos"[1][2][4][6].
4.1.1 Invertorul monofazat n semipunte
Invertorul n semipunte este cea mai simpl configuraie posibil de invertor monofazat, n care circuitul conine dou comutatoare bidirecionale n curent i unidirecionale n tensiune. Aceste invertoare sunt invertoare cu surs de tensiune cu punct median i sunt cunoscute i sub denumirea de "dubloare de curent". Schema de principiu a invertorului monofazat n semipunte, precum i formele de und caracteristice sunt prezentate n figura 4.1.
Figura 4. 1 Schema de principiu a unui invertor monofazat n semipunte i formele de und caracteristice acestui invertor pentru o sarcin inductiv sau o sarcin capacitiv.
Punctul O este punctul median al sursei, obinut prin intermediul celor dou condensatoare C de valori egale, iar comutatoarele bidirecionale constau ntr-o conexiune antiparalel dintre un tranzistor i o diod. Astfel putem scrie: uc1 + uc 2 = E du duc1 = c2 dt dt duc1 duc 2 ic1 = C dt = ic 2 = C dt = ic
(4.1)
83
Modelarea convertoarelor n comutaie_______________________________________________
Relaia 4.1 indic faptul c un condensator se ncarc i altul se descarc cu acelai curent ic. Scriind teorema lui Kirchoff n nodul O atunci: is = ic1 ic 2 = 2 ic . Putem spune astfel c curentul ce ajunge n punctul median O este dublu curentului care circul prin braul divizorului capacitiv. Atunci cnd T1 sau D2 conduc, relaiile ntre cureni sunt: ie = i1 + ic1 = is + ic = 2 ic + ic = ic is = +2 ie (4.2)
Intervalul de conducie a tranzistorului T2 este comun cu intervalul de conducie a diodei D1, iar curentul de sarcin este dat de relaia: is = 2 ie (4.3)
Ca o prim concluzie, putem spune c tranzistoarele sunt mai solicitate n curent (2ie) dect n tensiune (E). Cele dou tranzistoare conduc alternativ cte un unghi egal cu n cadrul fiecrei perioade a tensiunii de ieire, pentru a genera la bornele sarcinii o und dreptunghiular de amplitudine E/2. Avantajul undei dreptunghiulare const n faptul c, fiecare tranzistor comut doar de dou ori pe durata unei perioade a semnalului de ieire. Acest lucru permite o funcionare sigur a invertorului la puteri mari unde, de regul, comutatoarele electronice sunt mai lente. Ca dezavantaj major putem spune c, n cazul undei dreptunghiulare, nu se poate controla amplitudinea tensiunii pe sarcin, dect prin modificarea valorii E a tensiunii de alimentare. Din analiza Fourier putem scrie valoarea amplitudinii armonicii de ordinul n ca fiind:
bn =
1
us sin(nt )d (t ) =
0
4 1 1 E sin(nt )d (t ) = E 02 n 2 2
(4.4)
, iar fundamentala va avea amplitudinea: us max = 4 E E = 1.237 2 2 (4.5)
Avnd n vedere c, n majoritatea aplicaiilor, sarcina are o component inductiv, curentul va rmne ntrziat n urma tensiunii cu un unghi , ceea ce determin existena unui regim de recuperare, cnd o parte din puterea acumulat n sarcin se transfer sursei de alimentare prin conducia uneia dintre cele dou diode.
4.1.2 Invertorul monofazat n punte
Invertorul monofazat n punte, din punct de vedere constructiv are la baz dou brae de semipunte aa cum se observ i din schema de principiu a unui astfel de invertor, prezentat n 84
Universitatea Tehnic din Cluj-Napoca_______________________________________________
figura 4.2. n cazul acestui tip de invertor, sarcina se conecteaz ntre ieirile celor dou brae de semipunte notate cu A respectiv B, iar ca ipoteze n analiza invertorului vom considera comutatoarele i sursa de alimentare ideale.
Figura 4. 2 Schema de principiu a unui invertor monofazat n punte
Din punct de vedere al obinerii undei dreptunghiulare la ieirea acestui invertor, putem distinge dou tipuri de comenzi: comanda simetric i comanda asimetric.
4.1.2.1 Comanda simetric
Pentru ca la ieirea invertorului s se obin aa numita und dreptunghiular plin, tranzistoarele celor dou ramuri vor fi comandate perechi: T1 i T4, cu un semnal s1 de comand i respectiv T2 i T3 cu un semnal s2 de comand n antifaz cu semnalul s1. Pentru simplitate vom considera un comutator bidirecional format dintr-un tranzistor i dioda n antiparalel ca fiind un comutator K, astfel vom avea patru comutatoare bidirecionale Ki, i=(1:4). Indiferent de natura sarcinii, comutatoarele K1 i K4 vor fi nchise pentru un interval de timp t ( 0, T / 2 ) , iar K2 i K3 pentru t (T / 2, T ) , astfel putem scrie tensiunea la bornele sarcinii ca fiind: T + E pentru t 0, 2 us = E pentru t T , T 2
(4.6)
n figura 4.3 sunt prezentate formele de und caracteristice invertorului monofazat n punte comandat simetric avnd sarcina rezistiv-inductiv i rezistiv-capacitiv. Ca o prim observaie, n cazul unei sarcini rezistiv inductive, curentul is este defazat n urma tensiunii us cu un unghi , iar la schimbarea de polaritate a tensiunii de sarcin, transferul conduciei se face ntre un tranzistor i o diod situate pe poziii diferite n cadrul ramurii de invertor, superioar i respectiv inferioar. n 85
Modelarea convertoarelor n comutaie_______________________________________________
cazul sarcinii capacitive, curentul de sarcin is este defazat cu un unghi naintea tensiunii de sarcin. Astfel la momentul t = 0 tranzistorul T1 este comandat s se nchid i preia astfel curentul de la dioda D2. La momentul t = t0 curentul devine negativ, astfel T1 se blocheaz n mod natural i dioda D1 preia conducia, fiind parcurs de curent pn la momentul t= (T / 2 ) , unde intervine blocarea acesteia, determinata de intrarea n conducie prin comand a tranzistorului T2.
a) b) Figura 4. 3 Formele de und ale unui invertor monofazat monoalternan a) cu sarcin rezistiv-inductiv; b) cu sarcin rezistiv capacitiv
Dup cum se observ i n figura 4.3, o perioad a tensiunii de ieire poate fi descompus n patru intervale distincte. Astfel, putem spune c prin conducia tranzistoarelor T1, T4 sau T2, T3, puterea se transfer de la surs nspre sarcin. n funcie de polaritatea tensiunii de ieire vom avea un regim activ direct, n cazul n care valoarea instantanee a tensiunii de ieire este pozitiv, i un regim activ indirect, dac tensiunea de ieire este mai mic ca zero. Atunci cnd diodele de fug D1, D4 sau D2, D3 conduc, se realizeaz o conversie curent alternativ curent continuu ceea ce indic o funcionalitate de redresor, astfel n funcie de polaritatea tensiunii de ieire se obine un regim de recuperare direct sau inversat. n cazul unei comenzi simetrice aplicate unui invertor monofazat n punte, valoarea efectiv a tensiunii de sarcin se poate exprima cu relaia:
us.rms = 1 1 1 2 us2 d (t ) = E 2 d (t ) + ( E ) d (t ) = E 2 0 2 0 2
2
(4.7)
, iar din analiza Fourier valoarea amplitudinii armonicii de ordinul n se poate scrie ca fiind: bn = 1
2
us sin(nt )d (t ) =
0
E sin(nt )d (t ) =
0
4 E n
(4.8)
86
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Fundamentala semnalului dreptunghiular obinut la ieirea invertorului o putem exprima ca n relaia (4.9), iar valoarea efectiv a fundamentalei este dat de relaia (4.10).
us.1 =
4 E
sin t = 1.273 E sin t
4 E = 0.9 E 2
(4.9) (4.10)
us.1.rms =
4.1.2.2 Comanda asimetric
Comanda asimetric a invertorului monofazat n punte pentru obinerea undei deptunghiulare la ieire implic decalarea cu un unghi a semnalelor de comand pentru cele dou brae de semipunte. Astfel putem spune c e nevoie de o tratare independent a celor dou ramuri de invertor, principiul de comand rmnnd acelai ca i n cazul comenzi simetrice, doar c a doua ramur va comuta cu unghiul de ntrziere . Schema de principiu a unei comenzi asimetrice pentru fiecare comutator din puntea invertorului, este prezentat n figura 4.4.
Figura 4. 4 Intervalele de comand ale comutatoarelor invertorului n punte pentru comanda asimetric
Indiferent de natura sarcinii, comutatorul K1 este nchis n intervalul [ 0, T 2] , comutatorul K2 n intervalul [T 2, T ] , comutatorul K4 va fi nchis n intervalul [ , T 2 + ] , iar comutatorul K3 n intervalul [T 2 + , T + ] . Pornind de la figura 4.4, ce ilustreaz intervalele de comand ale comutatoarelor bidirecionale i de la schema invertorului n punte prezentat n figura 4.2, putem defini tensiunea pe sarcin, pentru fiecare interval de conducie a comutatoarelor, can relaia (4.11).
87
Modelarea convertoarelor n comutaie_______________________________________________
0 E u s = 0 E 0
pentru t (0, ) T pentru t , 2 T T pentru t , + 2 2 T pentru t + , T 2 pentru t (T , T + )
(4.11)
Formele de und caracteristice invertorului monofazat n punte, considernd ipotezele referitoare la sarcin, surs de alimentare i comutatoare ca cele enunate n cazul comenzii simetrice, adic ideale, pentru o sarcin inductiv sau o sarcin capacitiv sunt cele prezentate n figura 4.5.
a) b) Figura 4. 5 Formele de und a invertorului monofazat n punte: a) sarcin inductiv; b) sarcin capacitiv
Printr-o analiz a coeficienilor Fourier putem scrie tensiunea de ieire a celor dou semipuni din cadrul invertorului n punte cu relaiile (4.12) i (4.13), considernd c ieirea primei semipuni este borna A, iar ieirea celei de-a doua semipuni este borna B. U A0 = U B0 =
2 E sin nt n =1,3,5 n
(4.12)
2 E sin n(t ) n =1,3,5 n
(4.13)
88
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Valoarea efectiv a tensiunii de sarcin se poate exprima astfel ca fiind: us = E 1
(4.14)
, avnd valoarea efectiv a fundamentalei dat de relaia (4.15), iar valoarea efectiv a armonicii de ordinul n putnd fi exprimat cu relaia (4.16). us.1 = E us.1n = E 2 2
cos
(4.15)
2 2 cos n n 2
(4.16)
Ca o concluzie asupra comenzii asimetrice a invertoarelor n punte putem spune c valoarea efectiv a tensiunii de ieire se poate modifica prin reglarea defazajului ntre comenzile celor dou brae de punte.
4.1.3 Simularea invertoarelor cu und dreptunghiular la ieire
Pentru a evidenia cele enunate anterior s-a trecut la o simulare PSpice a invertoarelor n punte att comandate simetric ct i comandate asimetric. Astfel pentru invertorul n punte cu sarcin rezistiv inductiv comandat simetric cu: Rsarcin = 40 Ohm, Lsarcin = 10mH s-au obinut urmtoarele rezultatele.
IN+
K1 RG1 D1 VCOM1 V1 = -10 V2 = 15 TD = 1u TR = 1u TF = 1u PW = 499u PER = 1m 47 IRGBC30F D3
K3 RG3 IRGBC30F 47 VCOM3 V1 = -10 V2 = 15 TD = 501u TR = 1u TF = 1u PW = 499u PER = 1m OUT+ Rsarcina 40 Lsarcina 10mH OUT-
Vin
K2 RG2 D2 VCOM2 V1 = -10 V2 = 15 TD = 501u TR = 1u TF = 1u PW = 499u PER = 1m IN47 IRGBC30F D4
K4 RG4 IRGBC30F 47 VCOM4 V1 = -10 V2 = 15 TD = 1u TR = 1u TF = 1u PW = 499u PER = 1m
Figura 4. 6 Schema de simulare PSpice a invertorului n punte monofazat cu sarcin rezistiv inductiv
89
Modelarea convertoarelor n comutaie_______________________________________________
400V
10A
0V
5A
0A
-400V V(OUT+,OUT-) 10A
10A
IC(K1)
0A
5A
SEL>> -10A 5ms
6ms I(Rsarcina) Time
8ms
10ms
SEL>> -1A 5ms I(D1)
6ms Time
8ms
10ms
a)
b)
Figura 4. 7 Formele de und obinute n urma simulrii invertorului; a) sus tensiunea pe sarcin, jos curentul pe sarcin; b) curentul prin tranzistorul K1 sus, curentul prin dioda D1 jos
Pentru simularea acestui invertor s-a aplicat la intrarea lui o surs de tensiune continu de 310V, iar semnalele de comand pentru cele patru tranzistoare au fost modelate cu ajutorul surselor Vpulse pentru o frecven de comutaie de 1kHz dup cum urmeaz: se comand simultan tranzistoarele K1 i K4 cu sursele Vcom1 i Vcom4 caracterizate de: V1=-10V, V2=15V, Td=1us, Tr=1us, Tf=1us, PW=499us, PER=1ms; se comand simultan tranzistoarele K2 i K3 cu sursele Vcom2 i Vcom3 caracterizate de: V1=-10V, V2=15V, Td=501us, Tr=1us, Tf=1us, PW=499us, PER=1ms;
Pentru simularea invertorului monofazat cu sarcin R-L comandat asimetric valorile componentelor utilizate pentru simularea comenzi sincrone rmn nemodificate. Singurii parametrii ce se vor modifica sunt timpii de ntrziere Td ai surselor de comand cu 200us. Acest
2 fapt duce la obinerea unghiului = . 5 urmtoare.
Rezultatele obinute sunt prezentate n figurile
90
Universitatea Tehnic din Cluj-Napoca_______________________________________________
20V 400V
0V
0V
SEL>> -20V 20V
V(RG1:1,OUT+)
-400V 5.0A
V(OUT+,OUT-)
0V
0A
-20V 5ms
6ms V(VCOM3:+,OUT-) Time
8ms
10ms
SEL>> -5.0A 5ms
6ms I(Rsarcina) Time
8ms
10ms
a) b) Figura 4. 8 Formele de und obinute n urma simulrii invertorului; a) semnalele de comand pentru K1 (sus) i K3 (jos); b) formele de und ale tensiunii (sus) i curentului (jos) pe sarcin.
200V 5.0A
0V
2.5A
0A -200V 400V V(OUT+,Rsarcina:2) 5.0A IC(K1)
0V
2.5A
SEL>> -400V 5ms
6ms V(Lsarcina:1,Lsarcina:2) Time
8ms
10ms
SEL>> -1.0A 5ms
I(D1)
6ms Time
8ms
10ms
a) b) Figura 4. 9 a) sus tensiunea pe rezisten, jos tensiunea pe bobin; b) sus curentul prin tranzistorul K1, jos curentul prin dioda D1
Modelul surselor de comand a tranzistoarelor invertorului n punte sunt identice cu modelul prezentat pentru invertoarele cu comand simetric cu particularitatea timpilor de ntrziere: Vcom1: Td=1us; Vcom2: Td=501us, Vcom3: Td=701us; Vcom4: Td=201us. Prin aceste simulri se prezint avantajul folosirii unei comenzi asimetrice din punct de vedere a controlului puterii transmis sarcinii, prin modificarea decalajului semnalelor de comand ntre cele patru comutatoare cu unghiul . Dac n cazul comenzii simetrice puterea transmis sarcinii poate fi modificat doar prin variaia tensiunii de intrare, n cazul comenzii asimetrice puterea transmis sarcinii se poate regla prin pstrarea tensiunii de alimentare constant i modificarea decalajului .
91
Modelarea convertoarelor n comutaie_______________________________________________
4.2 Invertoare rezonante
Invertoarele rezonante sunt invertoare de band ngust, care sunt cuplate la sarcin prin intermediul unui filtru trece band, realizat, de obicei, ca un circuit rezonant L-C serie, derivaie sau mixt. Aceste invertoare lucreaz la o frecven apropiat sau egal cu frecvena de rezonan a circuitului cuplat la ieirea lor, format din sarcin i eventual un filtru L-C ataat [3][5][7]. Elementele circuitului sunt astfel proiectate, nct factorul de calitate s fie supraunitar, adic puterea reactiv s fie mai mare de ct cea activ, la frecvena de rezonan. Modul n care este realizat circuitul de ieire al invertoarelor rezonante (care cuprinde i sarcina) determin cteva din caracteristicile de baz ale acestor invertoare: Frecvena de lucru este fix sau fluctueaz n funcie de variaia frecvenei de rezonan a circuitului conectat la ieirea invertorului Comutaiile dispozitivelor active pot fi realizate n momentele trecerii prin zero a curentului sau tensiunii, fapt ce asigur pierderi n comutaie mai mici i posibilitatea utilizrii lor la capacitatea maxim de comutaie Datorit filtrrii realizate de circuitul exterior, forma de und a curentului sau tensiunii este aproximativ sinusoidal, micorndu-se valoarea energiei electromagnetice radiate n exterior.
n situaia n care se utilizeaz circuite i algoritmi de comand care s asigure comutaia dispozitivelor de putere la curent nul (ZCS-zero current switching) sau la tensiune nul (ZVS-zero voltage switching), frecvena de lucru poate fi crescut pentru puteri medii i mari. Astfel frecvena mare de lucru i posibilitatea realizrii comutaiilor cu pierderi mici de energie (ZCS sau ZVS) conduce la obinerea unor gabarite mici prin absena sau micorarea dimensiunilor snubberelor ce se folosesc pentru protecia dispozitivelor de putere i la creterea randamentului invertorului. Din punct de vedere al modului de comand, invertoarele rezonante pot fi mparite n dou categorii distincte: invertoare cu comand sincron; comutaia dispozitivelor de putere este sincronizat cu trecerile prin zero ale curentului (la invertorul cu alimtentare n tensiune) sau ale tensiunii (la invertorul cu alimentare n curent) i invertoare cu comand asincron situaie n care dispozitivele nu sunt comandate sincron cu trecerile prin zero ale mrimilor comutate.
92
Universitatea Tehnic din Cluj-Napoca_______________________________________________
4.2.1 Invertoarele rezonante de tip serie (sau cu alimentare n tensiune)
Figura 4.10 ilustreaz configuraiile de tip punte i semipunte ale unui invertor rezonant de tip serie sau invertor rezonant cu alimentare n tensiune[5]. Datorit faptului c frecvena de comutaie difer de regul de frecvena de rezonan a circuitului oscilant LC, dat de formula lui Thomson f 0 =
1 2 L C
, ntre tensiunea de ieire us i curentul de ieire is exist un defazaj.
Datorit acestui defazaj construcia invertoarelor are la baz comutatoare bidirecionale n curent, care permit comutarea tensiunii fr inversarea sensului curentului prin sarcin.
a)
b)
Figura 4. 10 Schema echivalent a invertorului cu sarcin rezonant serie. a) invertor rezonant n semipunte; b) invertor rezonant n punte
Principiul de funcionare a acestor invertoare const n aplicarea impulsurilor de tensiune dreptunghiular asupra circuitului de ieire, la o frecven apropiat sau egal cu frecvena de rezonan a circuitului oscilant LC. Dac considerm invertorul rezonant n punte, tensiunea la bornele sarcinii fiind dreptunghiular, se poate exprima din dezvoltarea n serie Fourier ca fiind:
us =
4 E
1 sin nt n =1,3,5 n
(4.17)
, iar curentul de sarcin se poate exprima ca fiind:
is (t ) =
4E
1 sin(nt n ) n =1,3,5 nZ n
(4.18)
1 , unde Z n = R 2 + n L este impedana circuitului rezonant, iar n = arctan nC reprezint defazajul dintre curentul i tensiunea de sarcin.
n L R
1 nC
93
Modelarea convertoarelor n comutaie_______________________________________________
Formele de und ale curentului i tensiunii pe sarcin pentru invertorul rezonant cu sarcin de tip serie sunt prezentate n figura 4.11.
Figura 4. 11 Formele de und ale curentului i tensiunii la bornele sarcinii
Pentru a avea o comutaie liber, este necesar ndeplinirea condiiei t1 <
T pentru 2
0t1 = , astfel:
t1 =
T 1 1 1 1 < L C < LC < L < L < 2 f 0 2 C C
(4.19)
Relaia (4.19) indic faptul c reactana total este capacitiv i circuitul oscilant este supracompensat. Curentul maxim de sarcina is are valoarea maxim pe intervalul de conducie a tranzistoarelor Q1 i Q4, iar tensiunea la bornele condensatorului este foarte aproape de o sinusoid i n cuadratur cu curentul de sarcin.
4.2.2 Invertoare rezonante de tip paralel (sau alimentate n curent)
Datorit rezonanei circuitului oscilant RLC paralel, la ieirea acestor invertoare se obine o tensiune sinusoidal i un curent dreptunghiular defazat nainte n raport cu tensiunea [3][5][7]. Datorit rezonanei de tip paralel construcia acestor invertoare necesit comutatoare cu blocare invers, care s permit comutarea curentului fr ca tensiunea de ieire s se inverseze. Schema de principiu a acestor invertoare rezonante cu sarcin paralel, n punte sau semipunte este prezentat n figura 4.12, iar formele de und caracteristice curentului i tensiunii la bornele sarcinii sunt ilustrate n figura 4.13.
94
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 4. 12 Schema echivalent a invertorului cu sarcin rezonant paralel. a) invertor rezonant cu sarcin paralel n semipunte; b) invertor rezonant cu sarcin paralel n punte
Figura 4. 13 Formele de und ale curentului i tensiunii la bornele sarcinii invertorului rezonant de tip paralel
Dezvoltarea n serie Fourier a curentului de sarcin duce la obinerea valorii lui din relaia: is (t ) = 4 I
1 sin nt n =1,3,5 n
(4.20)
Valoarea de vrf a fundamentalei se poate exprima cu relaia (4.21), iar valoarea efectiv se exprim cu ajutorul relaiei (4.22). is max = 4 I
(4.21)
is max =
4 I 2 2 = I 2
(4.22)
Considerm c n momentul t0 tranzistoarele invertorului n punte Q1 i Q4 conduc, condensatorul C se ncarc, iar tensiunea la bornele sarcinii us este sinusoidal dat de relaia: us = U s max sin(t + ) (4.23)
n momentul t1, tranzistoarele Q2 i Q3 primesc impulsul de comand. De la intrarea n conducie a celor dou tranzistoare condensatorul C se descarc prin Q2, sursa de alimentare i Q3. n timpul descrcrii condensatorului C, acesta aplic o tensiune invers tranzistoarelor Q1 i Q4, asigurnd astfel blocarea acestora. Curentul iL prin inductan are o form apropiat de sinusoid i este n cuadratur cu tensiunea de sarcin us. Dezavantajul major al acestor invertoare const n sursa de alimentare ce ar trebui s fie fcut printr-un redresor comandat datorit faptului c la 95
Modelarea convertoarelor n comutaie_______________________________________________
rezonan valoarea curentului total din circuit este minim i egal cu valoarea curentului pe rezisten, deoarece impedana circuitului paralel este maxim n acest caz. Astfel n afara frecvenei de rezonan tensiunea la bornele sarcinii crete odat cu creterea defazajului ceea ce duce la o putere primit mai mare i la o suprasolicitare a dispozitivelor semiconductoare.
4.2.3 Modelarea i simularea invertoarelor rezonante
n continuarea se prezint modelarea invertoarelor rezonante n semipunte ori punte de tranzistoare. Astfel, se propune un convertor rezonant ce urmeaz a fi modelat matematic pe baza relaiilor descrise de funcionarea acestuia. n urma modelului matematic propus, analitic sau pe baza ecuaiilor difereniale se realizeaz platforme Matlab de simulare a acestor invertoare. n final rezultatele obinute pe baza expresiilor matematice deduse i implementate n programul Matlab, sunt verificate cu ajutorul unor simulatoare dedicate simulrii circuitelor electrice sau prin validri experimentale, aa cum este cazul unui invertor rezonant n clas D prezentat n finalul capitolului.
4.2.3.1 Modelarea invertorului rezonant n semipunte
Schema circuitului analizat este prezentat n figura 4.14, iar ecuaiile matematice deduse pentru funcionarea circuitului sunt prezentate n cele ce urmeaz [18].
Uc3
Uc2
Figura 4. 14 Schema invertorului rezonant n semipunte cu sarcin RL
Pentru analiza acestui circuit au fost considerate patru intervale distincte de funcionare a invertorului, n funcie de strile de conducie i blocare a celor dou comutatoare. Astfel, n primul interval s-a considerat tranzistorul Q1 n conducie, iar tranzistorul Q2 blocat. Ecuaiile
Uc5
Uc4
96
Universitatea Tehnic din Cluj-Napoca_______________________________________________
difereniale ce se pot scrie n acest interval de funcionare precum i schema circuitului la care se reduce invertorul sunt prezentate n tabelul 4.1. Cel de-al doilea interval de funcionare a invertorului, ncepe odat cu blocarea tranzistorului Q1. Semnale de comand ale tranzistoarelor sunt generate n contratimp, iar pentru evitarea conduciei simultane a acestora, ntre cele dou semnale de comand exist un timp mort, ce ne asigur c astfel tranzistoarele sunt blocate. n acest interval tensiunea pe condensatorul C5 este nul, iar tensiunea de sarcin este dat de: us = E uc 4 uc 3 . Intervalul trei de funcionare ncepe odat cu intrarea n conducie a tranzistorului Q2. Valoarea tensiunii pe sarcin este egal cu valoarea tensiunii pe condensatorul C3 cu semn schimbat, iar tensiunea la bornele condensatorului C4 este tensiunea de alimentare a invertorului. Intervalul patru de funcionare este dat de blocarea tranzistorului Q2 i continuarea intervalului de comutaie cu timpul mort dintre semnale, astfel nct cele dou comutatoare sunt blocate n vederea evitrii producerii unui scurt. Acest interval este similar cu intervalul al doilea de funcionare, doar c, valoarea tensiunii la bornele condensatorului C4 este nul.
Tabel 4. 1 Ecuaiile matematice i schemele echivalente ale invertorului rezonant cu sarcina R-L n cele trei intervale de funcionare
Intervalul I de funcionare diL E uC 3 R iL dt = L duC 2 = iL dt C2 + C3 du duC 3 = C2 dt dt duC 4 dt = 0 duC 5 = 0 dt Intervalul II de funcionare (similar cu intervalul patru) diL E uC 3 uC 4 R iL dt = L duC 2 iL = dt C2 + C3 du duC 3 = C2 dt dt iL duC 4 dt = C + C 4 5 duC 5 du = C4 dt dt
97
Modelarea convertoarelor n comutaie_______________________________________________
Intervalul III de funcionare diL E uC 2 R iL dt = L duC 2 iL = dt C2 + C3 du duC 3 = C2 dt dt duC 4 dt = 0 duC 5 = 0 dt Pe baza acestor ecuaii difereniale deduse pentru fiecare din cele patru intervale de lucru ale invertorului i prezentate n tabelul 4.1, s-a implementat o platform Matlab de simulare care s permit vizualizarea formelor de und corespunztoare tensiunilor pe cele patru condensatoare, precum i a curentului prin bobin circuitului de sarcin. Platforma Matlab permite vizualizarea formelor de und att n regim permanent ct i n regim tranzitoriu, dispunnd de o interfa grafic cu ajutorul creia se pot modifica parametrii circuitului. Rezultatele obinute n urma simulrii Matlab a invertorului sunt prezentate n figurile ce urmeaz, pornind de la urmtoarele valori ale elementelor circuitului, valori prelevate de la un sistem funcional: tensiunea de alimentare E=310V, C2 = C3 = 680nF, C4 = C5 = 22nF, R = 3Ohm, L = 39,5uH, perioada de conducie a unui tranzistor Tc = 18us, timpul mort ntre cele dou semnale de comand dt = 2us. Astfel, perioada de comutaie a tranzistoarelor este TC = 2 (Tc + dt ) , iar perioada de rezonan este: Tr =
2 2 . 1 L (C2 + C3 )
98
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 4. 15 Formele de und obinute n urma simulrii Matlab a invertorului n regim tranzitoriu
Figura 4. 16 Formele de und obinute n urma simulrii Matlab a invertorului n regim permanent
n figurile 4.15 i 4.16 sunt prezentate rezultatele obinute n urma simulrii invertorului rezonant n semipunte att n regim de funcionare tranzitoriu ct i permanent. Platforma Matlab implementat returneaz formele de und caracteristice mrimilor de interes cum ar fi: curentul prin bobin, tensiunea pe condensatoarele C2 i C3 i tensiunea comutat de fiecare tranzistor prin reprezentarea tensiunilor pe condensatoarele C4 i C5. Putem spune astfel c aceast platform poate fi utilizat naintea proiectrii unui astfel de invertor. Returnarea formelor de und, precum i controlul parametrilor circuitului din interfaa grafic, reprezint un tool folositor n vederea simulrii i proiectrii invertoarelor rezonante n semipunte. 99
Modelarea convertoarelor n comutaie_______________________________________________
Figura 4. 17 Formele de und ale curentului i tensiunii pe sarcin n regim tranzitoriu
Figura 4. 18 Formele de und ale curentului i tensiunii pe sarcin n regim permanent
Figurile 4.17 i 4.18 ilustreaz formele de und ale tensiunii i curentului prin bobina L a invertorului rezonant att n regim tranzitoriu ct i n regim permanent de funcionare. Pentru a evidenia aceste forme de und, platforma le returneaz ntr-o figur separat. Pentru a valida rezultatele obinute n urma simulrii invertorului cu platforma Matlab implementat, s-a trecut la o simulare a acestui circuit cu ajutorul simulatoarelor specializate Orcad Pspice i Simulink. Condiiile de simulare i valorile componentelor au fost considerate aceleai ca i n simularea cu platforma Matlab. Schemele circuitelor simulate, precum i formele de und obinute, sunt prezentate n figurile urmtoare, iar platforma Matlab implementat este prezentat n anexa 4-1.
100
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 4. 19 Schema de simulare a invertorului n programul Simulink
Figura 4. 20 Formele de und ale curentului (jos) i tensiunii (sus) pe sarcin obinute n urma unei simulri Simulink a invertorului
Z1 C2 .75uF R3 0.5 V1 310 1 C1 3.3uF 40u R4 0.5 C5 C3 .75u 10n V1 = -12 V2 = 12 TD = 25.5u TR = .1u TF = .1u PW = 23.5u PER = 50.1u 10 V3 IXGH40N60A Z2 R2 L1 2 3 R5 C4 10n IXGH40N60A D5 R1 10
V1 = -12 V2 = 12 TD = 0 TR = .1u TF = .1u PW = 23.5u PER = 50.1u
V2
D6
Figura 4. 21 Schema de simulare a invertorului n Orcad Pspice
101
Modelarea convertoarelor n comutaie_______________________________________________
500V
0V
SEL>> -500V V(L1:1)- V(R5:2) 100A
0A
-100A 8.0713ms I(L1)
8.1000ms
8.1500ms Time
8.2000ms
8.2404ms
Figura 4. 22 Formele de und ale tensiunii (sus) i ale curentului (jos) pe sarcin obinute n urma unei simulri PSpice asupra invertorului
Comparnd rezultatele obinute prin cele trei metode putem spune c rezultatele obinute n urma simulrii cu platforma Matlab implementat sunt relevante n raport cu celelalte simulatoare fiind ntr-o marj de toleran acceptat de pna la 5%. Din punct de vedere al avantajelor pe care o astfel de platform le ofer putem aminti rapiditatea simulrii circuitului i faptul c odat ce ecuaiile au fost implementate, interfaa grafic permite utilizatorului s introduc valori noi pentru componentele circuitului cu care se dorete a fi rulat o alt simulare permind vizualizarea formelor de und att n regim tranzitoriu ct i n regim permanent. Matlab iLmax = 57 [A] uSmax = 462 [V] Pspice iLmax = 60 [A] uSmax = 490 [V] Simulink iLmax = 56 [A] uSmax = 455 [V]
Considernd sarcina invertorului ca fiind variabil pe durata funcionrii acestuia, este necesar a se implementa un algoritm care s reueasc meninerea transferului maxim de putere ntre ieirea invertorului i sarcina variabil n timp. Astfel pornind de la platforma Matlab implementat i prezentat anterior s-a realizat o simulare a acestor invertoare rezonante n bucl nchis. Rezultatele obinute n urma simulrii circuitului cu sarcin variabil sunt prezentate n figurile urmtoare. S-a pornit simularea invertorului pstrnd valorile condensatoarelor i a bobinei inverorului ca n cazul simulrilor precedente. S-a ales un interval de simulare care a fost
102
Universitatea Tehnic din Cluj-Napoca_______________________________________________
mprit n 3 intervale disticte, intervale n care bobina invertorului rezonant ii modific valoarea. Pentru a evidenia necesitatea unui astfel de algoritm care s realizeze transferul maxim de putere dinspre invertor nspre sarcin, s-a meninut n prim faz constant frecvena de comutaie determinat pentru frecvena de rezonan a circuitului cu prima valoare a bobinei de 39,5uH. n al doilea interval de simulare valoarea bobinei se njumtete, urmnd ca n ultimul interval s devin dublul valorii iniiale.
Figura 4. 23 Simularea invertorului rezonant cu sarcin variabil si frecven fix a semnalului PWM de comand. (sus curentul prin sarcin, jos tensiunea pe sarcin)
Figura 4.23. prezint rezultatele obinute n urma simulrii invertorului rezonant n semipunte cu sarcin variabil i meninerea constant a frecvenei de comutaie a tranzistoarelor de putere. Aa cum se observ i n figura de mai sus, unde sunt ilustrate formele de und ale curentului respectiv tensiunii pe bobin, la variaia sarcinii valoarea curentului i a tensiunii scade, ceea ce denot o puterea transmis dinspre invertor nspre sarcin de asemenea variabil. n cele mai multe cazuri de utilizare a unui astfel de invertor rezonant care prezint o sarcin cu caracter variabil n momentul funcionrii, astfel de diferene mari de putere nu sunt acceptate i duc la un randament sczut a invertorului rezonant.
103
Modelarea convertoarelor n comutaie_______________________________________________
Figura 4. 24 Simularea invertorului rezonant cu sarcin variabil si frecven ajustabil (n funcie de frecvena de rezonan a sarcinii) a semnalului PWM de comand. (sus curentul prin sarcin, jos tensiunea pe sarcin)
Figura 4.24 prezint formele de und ale curentului i respectiv tensiunii pe bobina L a invertorului rezonant, atunci cnd se utilizeaz un regulator care s ajusteze frecvena semnalelor PWM de comand n funcie de frecvena de rezonan a circuitului oscilant LC. Aa cum se observ i n figur, valorile curentului i tensiunii pe bobina L sunt meninute n jurul aceleai valori indiferent de variaiile bobinei, ceea ce duce la asigurarea unei puteri constante furnizate sarcinii. O astfel de platform de simulare ajut n proiectarea unor invertoare rezonante i din punct de vedere a comenzii tranzistoarelor de putere, astfel nct s se obin transferul maxim de putere dinspre invertorul rezonant nspre sarcin. [17][15][20]
4.2.3.2 Modelarea invertorului rezonant n punte
Schema de principiu a invertorului rezonant n punte este prezentat n figura 4.25, unde pentru obinerea semialternanei pozitive a tensiunii de ieire comutatoarele S1 i S3 sunt n conducie iar S2 i S4 blocate, iar pentru semialternana negativ se regsesc n conducie comutatoarele S2 i S4 iar S1 i S3 sunt blocate. ntreaga schem a circuitului se poate reduce la schema prezentat n figura 4.26, n care cele patru comutatoare sunt substituite de un singur comutator poziionat ntre sursele +E i E.
104
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 4. 25 Schema de principiu a invertorului rezonant n punte
Figura 4. 26 Schema echivalent a circuitului
Dac considerm comutatorul nchis spre pozitia sursei +E, atunci tensiunea i curentul prin sarcin o putem scrie ca:
di E = R i + L dt + uc i = C duc dt diL E Ri uc dt = L duc = i dt C
(4.24)
(4.25)
Derivnd cea de-a doua ecuaie din (4.26) se obine:
duc 2 1 E R i uc 1 E R du u u E R du = = C c c = c c dt C L C L L dt L L C L dt L C
nmulind cu LC ecuaia (4.26) obinem o ecuaie diferenial de ordinul 2 de forma:
(4.26)
L C
duc 2 du + R C c + uc = E dt dt
(4.27)
105
Modelarea convertoarelor n comutaie_______________________________________________
n mod analog se determin ecuaia matematic pentru curent i este dat de relaia (4.28).
L C
nlocuind n relaia (4.28)
diL 2 di + R C L + i = 0 dt dt
(4.28)
diL = p pentru simplitatea calculelor, putem rescrie ecuaia ca fiind: dt L C p2 + R C p + 1 = 0
(4.29)
Factorul de calitate al circuitului Q este dat de relaia Q = dat de relaia r =
1 L , pulsaia de rezonan r este R C
R 1 , iar constanta de amortizare a circuitului este: a = . Relaiile ntre 2L LC aceste valori se pot exprima ca fiind: 1 L 1 1 = Q r = R C LC RC 1 L Q = R C = L r R 1 LC
Astfel putem rescrie relaia (4.30) ca fiind:
(4.30)
p2 +
r
Q
p + r 2 = 0 Q
(4.31) (4.32) (4.33)
Q p 2 + r p + Q r 2 = 0
p1,2 = r r 2 (1 4Q 2 ) 2Q
Privind forma soluiilor ecuaiei (4.30), se poate purta o discuie n funcie de factorul de calitate al circuitului Q. Astfel dac Q =
1 , soluiile ecuaiei devin de forma (cazul I): 2
1 r r 2 1 4 4 p = 1,2 1 2 2 p1 = p2 = r
(4.34)
106
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Dac Q > 1 , soluiile ecuaiei se pot scrie sub forma (cazul II): 2 1 + j 4 Q 2 1 p = r 1 2Q r 1 j 4 Q 2 1 p2 = 2Q
) )
(4.35)
Dac Q <
1 , soluiile ecuaiei devin (cazul III): 2
1 + 1 4 Q 2 p = r 1 2Q r 1 1 4 Q 2 p2 = 2Q
) )
(4.36)
Pentru cel de-al treilea caz forma general a ecuaiilor tensiunii i curentului prin sarcin se poate exprima ca fiind: u (t ) = E + Au exp p1t + Bu exp p2t pt pt i (i ) = Ai exp 1 + Bi exp 2 , iar derivatele acestor ecuaii sunt de forma: du p1t p2 t dt = p1 Au exp + p2 Bu exp di = p A exp p1t + p B exp p2t 1 2 i i dt La momentul iniial t =0 valoarea tensiunii i a curentului este dat de: u (0) = E + Au + Bu i (0) = Ai + Bi , iar derivatele lor au forma: du dt = p1 Au + p2 Bu = Du di = p A + p B = D 1 2 i i i dt (4.39) (4.37)
(4.38)
(4.40)
107
Modelarea convertoarelor n comutaie_______________________________________________
Coeficienii Au, Bu pentru tensiune i Ai, Bi pentru curent din relaiile (4.39) i (4.40) se pot determin astfel: = 1 p1 1 p2 uE Du i Di 1 p1 1 p2 = p2 p1 (4.41)
Au =
uE Du 1 p1
= p2 (u E ) Du
(4.42)
Bu =
= Du p1 (u E ) 1
(4.43)
Ai =
p2 i Di
= p2 i Di
(4.44)
Bi = Stiind c: Du =
= Di p1 i
(4.45)
I0 E R I0 U 0 i Di = , derivatele tensiunii pe condensator i a C L curentului prin bobin, coeficienii Au, Bu, Ai, Bi se exprima ca fiind: p2 (U 0 E ) Du D p1 (U 0 E ) , Bu = u Au = p2 p1 p2 p1 A = p2 I 0 Di , B = Di p1 I 0 i i p2 p1 p2 p1 Notnd cu e1 = exp p1t i e2 = exp p2t putem scrie tensiunea i curentul ca fiind: p2 (U 0 E ) Du Du p1 (U 0 E ) u = E + e1 + e2 p2 p1 p2 p1 Di p1 I 0 p2 I 0 Di i = p p e1 + p p e2 2 1 1 2 Notm p2 p1 = d rezult: p2 e1 (U 0 E ) Du e1 Du e2 p1 e2 (U 0 E ) + u = E + d d p2 e1 I 0 Di e1 Di e2 p1 e2 I 0 i = + d d
(4.46)
(4.47)
(4.48)
108
Universitatea Tehnic din Cluj-Napoca_______________________________________________
p2 e1 p1 e2 e e + Du 2 1 u = E + (U 0 E ) d d i = I p2 e1 p1 e2 + D e2 e1 0 i d d Dac notm cu x = curentului se reduce la: I u = E + (U 0 E ) x + 0 y u = E + (U 0 E ) x + Du y C i = I 0 x + Di y i = I x + E R I 0 U 0 y 0 L 1 u = E + (U 0 E ) x + R I 0 Q r y u = E + (U 0 E ) x + R I 0 R C y E r R I 0 U 0 i = I 0 x + E R 1 R I 0 U 0 y i = I 0 x + R Q 1 E E y R L E E
(4.49)
p2 e1 p1 e2 e e i cu y = 2 1 forma matematic a tensiunii i a d d
(4.50)
(4.51)
Astfel, putem rescrie ntr-un mod mai elegant forma matematic a curentului i tensiunii pe sarcina R-L-C ca fiind:
u = E + (U 0 E ) x + R I 0 Q r y u = E + (U 0 E ) x + R I 0 Q r y r U 0 r r E U0 r (4.52) E r i = R Q y I 0 Q y R Q y + I 0 x i = Q y R + I 0 x Q y Cum la momentul iniial t=0, U0=0 i I0=0 iar n regim staionar valoarea tensiunii i a curentului la sfritul unei perioade trebuie sa coincid cu valoarea acestora la nceputul perioadei urmtoare, se poate exprima valoarea tensiunii si a curentului n urmtorul moment de timp ca:
u1 = E (1 + x) E r i1 = R Q y Pentru cazul II atunci cnd Q >
(4.53)
1 , datorit soluiilor complexe ale ecuaiilor difereniale 2 de ordinul doi, forma general a ecuaiilor matematice ce se pot scrie pentru tensiunea i curentul pe sarcina R-L-C a invertorului sunt date de relaia:
u = E + ( Au cos( t ) + Bu sin( t )) exp at at i = ( Ai cos( t ) + Bi sin( t )) exp (4.54)
109
Modelarea convertoarelor n comutaie_______________________________________________
Dac derivm ecuaia tensiunii din relaia (4.54) se obine: du = exp at ( Au sin( t ) + Bu cos( t )) a exp at ( Au cos( t ) + Bu sin( t )) (4.55) dt du = exp at [( Bu a Au ) cos( t ) (a Bu + Au ) sin( t )] dt La momentul iniial t=0 tensiunea pe sarcin se poate exprima ca fiind: U 0 = E + Au Au = U 0 E Du + a Au i , Du = Du = Bu a Au Bu = C (4.57) (4.56)
Valoarea curentului prin sarcin se poate determina din relaia (4.58), prin relaiile (4.57) i ecuaia curentului din relaia (4.54).
du = C exp at [( Bu a Au ) cos( t ) (a Bu + Au ) sin( t )] i = C dt Ai = ( Bu a Au ) C = C Du Ai = I 0
Coeficientul Bi se poate exprima ca fiind: Du + a Au C Au Bi = C (a Bu + Au ) = a C a Du + a 2 Au + 2 Au 1 R I 0 + 2 U 0 2 E Bi = Bi = C 2 L Di + a Ai U E + R I0 , Di = 0 Bi = L Dac factorul de calitate al circuitului este Q =
(4.58)
(4.59)
1 , soluiile ecuaiilor difereniale de ordinul 2 doi sunt reale i egale, de unde rezult forma general a ecuaiilor tensiunii i curentului pe sarcina R-L-C de forma: u = E + ( Au + Bu t ) exp pt , pt i = ( Ai + Bi t ) exp , cu coeficienii Au, Bu, Ai, Bi descrii de relaia: p = r (4.60)
110
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Au = U 0 E A = I 0 i i Bu = Du + a Au , Du = C E U 0 R I0 Bi = Di + a Ai , Di = L
(4.61)
Astfel n funcie de factorul de calitate al circuitului rezonant R-L-C tensiunea i curentul la bornele sarcinii se pot exprima ca:
T p 1 + 1 4Q 2 e1 = exp c 1 , p1 = r 2Q u = E + Au e1 + Bu e2 Tr r , Q < 0,5 i = Ai e1 + Bi e2 T p 1 1 4Q 2 e2 = exp c 2 , p2 = r 2Q Tr r
(4.62)
u = E + ( Au + Bu t ) e T , e = exp c Q = 0,5 Tr i = ( Ai + Bi t ) e
p1 = p2 = r
(4.63)
c = cos Tc Tr T u = E + ( Au c + Bu s ) e Q > 0,5 , s = sin c Tr i = ( Au c + Bu s ) e Tc T r e = exp Q 2
4 Q2 2 2Q 4 Q2 2 2Q (4.64)
Sistemele de ecuaii determinate anterior stau la baza implementrii unor platforme Matlab de simulare a invertoarelor rezonante n punte. Aceste platforme Matlab trebuie s returneze formele de und caracteristice ale invertorului rezonant cu sarcin R-L-C serie, att n regim tranzitoriu de funcionare, ct i n regim permanent i s permit simularea invertorului cu comand sincron, ct i cu comand asincron. Pentru exprimarea puterii transmise dinspre invertor nspre sarcin, pentru un regim tranzitoriu de funcionare, sau pentru un invertor rezonant comandat asincron, puterea se poate exprima ca fiind produsul dintre tensiunea i curentul
111
Modelarea convertoarelor n comutaie_______________________________________________
exprimate cu ajutorul relaiilor prezentate anterior. Astfel, rezultatele obinute n urma simulrii Matlab a invertorului rezonant n punte cu sarcin R-L-C serie, sunt prezentate n figurile urmtoare. Comanda sincron a acestor invertoare are la baz sincronizarea semnalelor de comand a comutatoarelor de putere cu trecerile prin zero ale curentului de sarcin. Din acest motiv puterea disipat pe dispozitivele de comutaie este aproape nul. Pentru a arta funcionarea invertorului simulat cu ajutorul platformei Matlab implementat pe baza ecuaiilor prezentate anterior, s-au ales dou seturi de valori prezentate n tabelul 4.2, astfel nct valoarea factorului de calitate a circuitului rezonant, s fie supraunitar i subunitar.
Tabel 4. 2 Seturile de valori de simulare ale invertorului rezonant n punte cu comand sincron
Date de intrare pentru setul I de valori
Tensiunea de alimentare E = 25 [V] Bobina circuitului rezonant L = 400 [uH] Condensatorul circuitului rezonant C = 1 [uF] Rezistena circuitului rezonant R = 3 [Ohm]
Date de intrare pentru setul II de valori
Tensiunea de alimentare E = 25 [V] Bobina circuitului rezonant L = 40 [uH] Condensatorul circuitului rezonant C = 10 [uF] Rezistena circuitului rezonant R = 3 [Ohm]
Figura 4. 27 Rezultatele simulrii invertorului rezonant n punte cu sarcin R-L-C pentru setul I de valori n regim tranzitoriu de funcionare
112
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 4. 28 Rezultatele simulrii invertorului rezonant n punte cu sarcin R-L-C pentru setul I de valori n regim permanent de funcionare
Figurile 4.27 i 4.28 prezint simulrile Matlab asupra invertorului rezonant cu sarcin R-L-C serie, comandat sincron cu trecerile curentului prin zero. Aa cum se poate observa i n figurile anterioare platforma Matlab returneaz formele de und caracteristice invertorului: curentul de sarcin, tensiunea pe condensator, forma semnalului de comand precum i forma puterii medii furnizat sarcinii, exprimat ca produsul dintre valoarea RMS (root mean square) a curentului i valoare RMS a tensiunii pe fiecare perioad.. De asemenea, platforma calculeaz perioada de rezonan a circuitului L-C, perioada de comutaie, factorul de calitate i returneaz valorile maxime ale curentului i tensiunii. Dac ne raportm la perioada de comutaie Tc i la perioada de rezonan Tr , se observ c n cazul unui factor de calitate supraunitar, chiar mai mare ca trei, aceste perioade devin aproximativ egale, diferena dintre cele dou, fiind n jurul valorii de 1%. Cele dou perioade se pot exprima ca n relaia 4.65. 2 Tr = , 0 = 0 T = 2 , = c c c 1 LC R2 1 1 = 0 1 2 L C 4 L 4 Q2
(4.65)
Valorile foarte apropiate a celor dou perioade, face ca invertorul s fie comandat cu o frecven foarte apropiat de frecvena de rezonan a circuitului oscilant. Acest fapt este datorat unui factor de calitate ridicat, care impune ca pulsaia de comutaie i pulsaia de rezonan din relaia 4.65, s fie aproximativ egale. Astfel, comandat pe frecvena de rezonan a circuitului oscilant i la trecerile prin zero ale curentului prin bobina, invertorul furnizeaz o putere maxim sarcinii i diminueaz pierderile de comutaie la maxim, ceea ce l face s aib un randament foarte
113
Modelarea convertoarelor n comutaie_______________________________________________
ridicat. Un aspect interesant din punct de vedere a funcionrii invertorului este prezentat prin simularea acestuia cu setul doi de valori.
Figura 4. 29 Rezultatele simulrii invertorului rezonant n punte cu sarcin R-L-C pentru setul II de valori n regim pemanent de funcionare
n figura 4.29 se prezint rezultatele obinute n urma simulrii Matlab a invertorului comandat sincron, pentru setul doi de valori. Aceste valori duc la un factor de calitate subunitar, ceea ce duce la o diminuare a puterii transmise sarcinii. Acest fapt se datoreaz n principal valorii sczute a factorului de calitate Q, ce duce la o frecven de comutaie a dispozitivelor de putere ale invertorului, sub valoarea frecvenei de rezonan a circuitului oscilant. Astfel, forma dreptunghiular a tensiunii aplicate sarcinii de o frecven mai mic dect frecvena de oscilaie, face ca sarcina s aib un comportament capacitiv, ceea ce duce la o pierdere de putere. Ca o prim concluzie asupra acestor invertoare comandate sincron, datorit legturii ntre perioada de comutaie i perioada de rezonan prin factorul de calitate al circuitului de sarcin, obinerea unor valori mari a puterii transmise unui circuit R-L-C dat, se poate realiza doar prin modificarea tensiunii de alimentare. n vederea validrii rezultatelor obinute pe baza modelului matematic propus i a platformei Matlab implementat, asupra invertoarelor rezonante comandate sincron cu trecerile prin zero ale curentului, s-a realizat o simulare a acestor invertoare cu ajutorul pachetului de programe Orcad Pspice, pentru aceleai valori ale componentelor ca i n cazul simulrilor Matlab. Schema de simulare i rezultatele obinute se prezint n figurile urmtoare.
114
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Z3 Z1 IXGH40N60A D5 Dbreak V1 = -12 V2 = 12 TD = 0 TR = 0.1u TF = 0.1u PW = 62.9u PER = 126u V7 L1 1 400uH Z2 IXGH40N60A V1 = -12 V2 = 12 TD = 64u TR = 0.1u TF = 0.1u PW = 62.9u PER = 126u V6 V1 = -12 V2 = 12 TD = 0 TR = 0.1u TF = 0.1u PW = 62.9u PER = 126u V5 D6 Dbreak C9 1n
I
IXGH40N60A C6 1n V1 = -12 V2 = 12 TD = 64u TR = 0.1u TF = 0.1u PW = 62.9u PER = 126u C5 1u
V+ V-
V8 D8 Dbreak C7 1n
V1 25
R1 2 3
Z4
D7 IXGH40N60A Dbreak
C8 1n
Figura 4. 30 Schema de simulare PSpice a invertorului rezonant n punte cu sarcin R-L-C serie
1.00KW 0.95KW 0.90KW 0.85KW RMS(I(L1))* RMS(V(C5:1,Z3:E)) 10A 0A SEL>> -19A 400V (4.6971m,10.250)
10A 0A -10A (4.2027m,10.223) 108.375W 108.250W 108.125W RMS(I(L1))* RMS(V(C5:1,C7:1)) (4.3871m,108.224)
I(L1)
40V
I(L1)
0V
(4.8547m,204.7
0V SEL>> -40V 4.0ms 4.1ms V(C5:1,C7:1)
(4.2756m,24.078)
-400V 4.655ms
4.700ms V(C5:1,C7:1)
4.750ms
4.800ms Time
4.850ms 4.900ms
4.2ms
4.3ms Time
4.4ms
4.5ms
a)
b)
Figura 4. 31 Rezultatele Pspice obinute n urma simulrii invertorului rezonant n punte n regim permanent; a) pentru setul I de valori cu Tr = 126us ; b) pentru setul II de valori cu Tr = 188,9 us
O comparaie asupra valorilor obinute n urma celor dou simulri este prezentat n tabelul 4.2. Privind formele de und obinute, se poate afirma c alura formelor de und obinute n Matlab este foarte asemntoare cu forma de und pe care simulatorul PSpice o returneaz. Puterea transmis sarcinii n cazul acestor invertoare rezonante comandate sincron se poate determina n regim permanent cu relaia[5][7]:
2 C 2 0 2 R 2 E 2 exp 2 1 2 2Q = 2 E P = I R = 2 R Q2 2 R 1 exp 2 Q
2
exp 2Q
1 exp 2 Q
(4.66)
115
Modelarea convertoarelor n comutaie_______________________________________________
n cazul unei comenzi asincrone aplicat invertoarelor rezonante n punte, comanda dispozitivelor de putere nu se mai face sincron cu trecerile prin zero a curentului de sarcin. Astfel, aceast comand are la baz raportul dintre perioada de comutaie a invertorului i perioada de rezonan a circuitului L-C. Pe baza modelului matematic prezentat anterior, s-a implementat o platform Matlab de simulare a invertorului rezonant comandat asincron. Rezultatele obinute n urma simulrilor Matlab sunt prezentate n figurile urmtoare, pornind de la aceleai seturi de valori ca i n cazul comenzii sincrone, valori prezentate n tabelul 4.2.
Figura 4. 32 Rezultatele Matlab obinute pentru comanda asincron Tc<T pentru setul I de valori n regim tranzitoriu
Figura 4. 33 Rezultatele Matlab obinute pentru comanda asincron Tc<T pentru setul I de valori n regim permanent
116
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 4. 34 Rezultatele Matlab obinute la simularea invertorului rezonant n punte cu comand asincron Tc>Tr pentru setul I de valori n regim tranzitoriu
Figura 4. 35 Rezultatele Matlab obinute la simularea invertorului rezonant n punte cu comand asincron Tc>Tr pentru setul I de valori n regim permanent
117
Modelarea convertoarelor n comutaie_______________________________________________
Figura 4. 36 Formele de und n regim permanent pentru setul II de valori cu Tc>T
Figura 4. 37 Formele de und n regim permanent pentru setul I de valori cu Tc<T
Figurile 4.32:4.37 prezint rezultatele obinute n urma simulrilor Matlab a invertoarelor rezonante n punte cu comand asincron. Platforma Matlab implementat returneaz formele de und ale curentului i tensiunii pe sarcina invertorului i calculeaz perioada de comutaie n funcie de gradul de asincromatism dorit, prin modificarea parametrului m din interfaa grafic. Defazajul dintre tensiunea de sarcin i curent este calculat n programul Matlab, rezultnd astfel un unghi exprimat n radiani ce se returneaz n interfaa grafic. Pe baza acestui aspect se pot trage concluzii relevante din punct de vedere a funcionrii circuitului. Astfel, pentru un unghi negativ, circuitul se comport capacitiv, fapt datorat ntrzierii tensiunii fa de curent. Altfel exprimat, acest fapt se datoreaz frecvenei de comutaie sub valoarea frecvenei de rezonan. 118
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Pentru un unghi pozitiv, curentul este n urma tensiunii, fapt datorat frecvenei de comutaie peste valoarea frecvenei de rezonan. Pornind de la rezultatele obinute n urma simulrii celor dou metode de control a invertoarelor rezonante se prezint o comparaie ntre valorile tensiunii, valorii curentului i puterii de sarcin obinute.
Tabel 4. 3 Valorile obinute n urma simulrilor Matlab pentru invertoarele rezonante n punte cu sarcin R-L-C serie
Invertor comandat sincron PSpice Matlab
Invertor asincron Tc>Tr Matlab Q = 6,66 Tr = 125,6 us
Invertor asincron Tc<Tr
Tc = 126 us
Tc = 126 us
Tc = 150 us Ucmax = 97,22 [V] Imax = 4,08 [A] Pmed =278 [W] Q = 0,66 Tr = 125,6 us
Tc = 100 us Ucmax = 52,94 [V] Imax = 3,48 [A] Pmed =209 [W]
Ucmax =204,1[V] Ucmax =213,18 [V] Imax = 10,25 [A] Pmed =0,98 [kW] Imax = 10,6 [A] Pmed =1,01 [kW]
Tc = 189,6 us Ucmax = 24 [V] Imax = 10,23 [A] Pmed =108 [W]
Tc = 189,6 us Ucmax =30,23 [V] Imax = 11,33 [A] Pmed =115 [W]
Tc = 150 us Ucmax = 25,17 [V] Imax = 11,06 [A] Pmed =128,79 [W]
Tc = 100 us Ucmax = 17,17[V] Imax = 9,29 [A] Pmed =109 [W]
Comparnd rezultatele obinute n urma celor dou metode de comand, putem spune c n cazul comenzii sincrone se obine o valoare a puterii transmise sarcinii superioar metodei de comand asincron. La comand asincron, o valoare ridicat a puterii transmise sarcinii se obine pentru o perioad de comutaie mai mare dect perioada de rezonan a circuitului L-C. De cele mai multe ori n proiectare sunt necesare doar valorile maxime n regim permanent ale mrimilor de interes. Astfel pentru determinarea valorile exacte ale curentului i tensiunii de sarcin s-a implementat o platform Matlab care calculeaz n regim staionar valorile maxime ale
119
Modelarea convertoarelor n comutaie_______________________________________________
curentului i tensiunii, i reprezint grafic caracteristica tensiune de sarcin - tensiune de intrare i caracteristica curent de sarcin - curent de intrare, pentru diferite valori ale factorului de calitate i ale raportului perioadei de comutaie-perioad de rezonan, pe baza ecuaiilor deduse din (4.24:4.64). Rezultatele obinute n urma implementrii acestei platforme sunt prezentate n figurile urmtoare.
Figura 4. 38 Rezultatele obinute pentru simularea caracteristicilor invertoarelor rezonante n punte pentru un factor de calitate de 2,68 i Tc/Tr = 0,8
Figura 4. 39 Rezultatele obinute pentru simularea caracteristicilor invertoarelor rezonante n punte pentru un factor de calitate de 4,71 i Tc/Tr = 1,2
Figurile 4.38 i 4.39 prezint rezultatele obinute n urma simulrii invertorului cu platforma Matlab implementat pentru determinarea valorilor n regim permanent de funcionare. Astfel de platforme de simulare sunt necesare atunci cnd se dorete proiectare unor invertoare 120
Universitatea Tehnic din Cluj-Napoca_______________________________________________
rezonante, i aa cum se poate observa i din figurile prezentate anterior pe baza rezultatelor obinute se pot trage concluzii asupra funcionrii circuitului. Caracteristica de transfer n tensiune i n curent a circuitului se reprezint n funcie de variaia raportului dintre cele dou perioade, perioada de comutaie i perioad de rezonan i de valori ale factorului de calitate a circuitului. Totodat din caracteristicile de tensiune i curent pentru un raport stabilit se poate determina comportarea circuitului. Astfel pentru un raport mai mare ca 1 circuitul se comporta inductiv, iar pentru un raport subunitar circuitul este capacitiv, astfel explicnd i diferenele de putere obinute n funcie de comanda asincron. Valorile maxime, se obin pentru un raport egal cu 1 ceea ce indic c circuitul este comandat sincron. Platforma Matlab permite introducerea parametrilor circuitului i returneaz caracteristica de tensiune i de curent pentru patru valori diferite ale factorului de calitate, permitnd utilizatorului s reia simularea cu un set nou de valori n cazul n care rezultatele returnate nu sunt considerate satisfctoare. Prin modificarea raportului Tc/Tr , pentru un set de valori dat, se poate determina valoarea maxim a puterii transmise sarcinii i astfel se pot deduce algoritmi de comand ai invertorului rezonant.
4.3 Invertoare rezonante serie-paralel n clas D. Modelare i implementare.
Implementarea i modelarea acestor invertoare pornete de la schema unui invertor rezonant n clas D prezentat n figura 4.40, unde se evideniaz faptul c acest invertor este compus din dou comutatoare bidirecionale notate Q1 i Q2, un circuit rezonant serie format din L1-C1-R1 i un circuit rezonant paralel format din L2-C2-R2.
Figura 4. 40 Schema de principiu a unui invertor rezonant n clas D
121
Modelarea convertoarelor n comutaie_______________________________________________
Privind spre circuitul rezonant al invertorului putem distinge cele dou circuite oscilante LC serie i paralel. Astfel, pentru modelarea acestui invertor o analiz n frecven a circuitului de sarcin este necesar. Considernd circuitul serie C1L1 avnd impedana: Z1 = R1 + j L1 + i circuitul paralel C2L2 cu impedana: 1 j C2 Z2 = 1 R2 + j L2 + j C2 ( R2 + j L2 ) Funcia de transfer n tensiune este dat de relaia: Z2 Us = Ui Z1 + Z 2 (4.69) 1 j C1 (4.67)
(4.68)
Pornind de la faptul c se dorete a se obine o rezonana de curent, adic pe circuitul paralel i c frecvena de rezonan a acestuia s fie n jurul valorii de 100kHz, astfel nct comanda comutatoarelor convertorului s fie uor de realizat, a fost implementat o platform Matlab de simulare a circuitului serie-paralel n frecven. Deoarece prin circuitul serie C1L1 se realizeaz o adaptare de impedan ntre circuitul paralel C2L2 si ieirea invertorului, astfel nct condensatorul C1 are rolul de a tia componenta continu a tensiunii, iar bobina L1 de a proteja comutatoarele atunci cnd se obine rezonana de curent pe circuitul paralel, formula de calcul a frecvenei circuitului paralel se poate exprima cu formula Thomson a frecvenei de rezonan a unui oscilator LC, fr a lua n considerare circuitul serie. Astfel pentru a obine valoarea de 100kHz pe circuitul paralel valorile bobinei si a condensatorului au fost alese: L2 = 25uH, C2 = 100nF, iar circuitul serie are valorile C1 = 450nF, L1 = 300 uH, asigurnd astfel o frecven de rezonan pe circuitul serie mult inferioar.
122
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 4. 41 Simulare n frecven asupra circuitului rezonant serie paralel n programul Matlab
Figura 4.41 prezint comportarea circuitului serie-paralel n frecven, simulare realizat cu ajutorul unei platforme Matlab implementat pentru acest circuit. Se pot observa n figura de mai sus cele 2 frecvene de rezonan ale circuitului serie n jurul valorii de 13,6 kHz i a circuitului paralel n jurul valorii de 100kHz. Totodat aceast simulare ne prezint i faptul c cele 2 circuite nu se influeneaz reciproc, deci frecvena de comand a tranzistoarelor invertorului se poate face n jurul frecvenei de rezonan a circuitului paralel. Pentru a determina funcionarea circuitului i pentru a vizualiza formele de und caracteristice acestui invertor s-a realizat o platform Matlab de simulare ce are la baz ecuaiile matematice difereniale ce pot fi deduse pentru invertorul rezonant cu sarcin serie-paralel n clas D de funcionare. Astfel s-au considerat patru intervale distincte de funcionare a invertorului date de strile de conducie i blocare ale tranzistoarelor respectiv diodelor n paralel cu acestea. Considernd n primul interval tranzistorul Q1 deschis ecuaile ce se pot deduce pentru acest interval sunt date de: diL1 E uC2 uC1 R1 i1 = dt L1 diL uC R2 i2 2 = 2 L2 dt duC1 = i1 dt C1 duC2 i1 i2 dt = C 2 Iar pentru intervalul n care tranzistorul Q2 este deschis ecuaiile sunt date de: 123
(4.70)
Modelarea convertoarelor n comutaie_______________________________________________
diL1 uC2 uC1 R1 i1 = dt L1 diL uC R2 i2 2 = 2 L2 dt duC1 = i1 dt C1 duC2 i1 i2 dt = C 2
(4.71)
Intervalele de conducie a celor dou diode sunt determinate de evoluia curentului i a tensiunii prin circuit, astfel nct invertorul s funcioneze n mod rezonant. Ecuaiile matematice pentru aceste intervale de conducie a diodelor nu implic nici o problem ele fiind similare cu ecuaiile caracteristice tranzistoarelor pe care le nsoesc. Problema este dat de timpi de deschidere i de blocare ai diodelor, timpi ce depind de evoluia mrimilor din circuit i de intervalul n care cele dou comutatoare controlate sunt blocate simultan, prin introducerea timpului mort ntre semnalele de comand. Rezultatele obinute n urma rulrii platformei Matlab implementat sunt prezentate n figurile urmtoare.
Figura 4. 42 Rezultatele obinute n urma simulrii invertorului rezonant n regim permanent de funcionare obinute cu platforma Matlab implementat
124
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 4. 43 Rezultatele obinute n urma simulrii invertorului rezonant n regim tranzitoriu de funcionare obinute cu platforma Matlab implementat
Figurile 4.42 i 4.43 prezint rezultatele obinute n urma rulrii platformei Matlab implementat pentru aceste invertoare n regim de funcionare permanent i tranzitoriu returnnd formele de und ale mrimilor de interes pentru o perioad de comutaie de 9.5 us. Platforma Matlab returneaz formele de und ale curentului prin bobina L1 i bobina L2, precum i formele de und ale tensiunii pe cele dou condensatoare. Interfaa grafic implementat permite de asemenea modificarea parametrilor de simulare sau ai perioadei de comutaie a celor 2 tranzistoare. Pentru a verifica rezultatele obinute n urma simulrii invertorului cu platforma Matlab implementat s-a trecut la o simulare a acestui invertor cu ajutorul programului PSpice. Schema de simulare precum i rezultatele obinute sunt prezentate n figurile urmtoare.
Z1 R1 V1 = -10 V2 = 10 TD = 0 TR = 0.01u TF = 0.01u PW = 3u PER = 9.5u V2 10 IRG4PC50S D1 MBR1540 C1 1 450n Z2 R2 V1 = -10 V2 = 10 TD = 4.75u TR = 0.01u TF = 0.01u PW = 3u PER = 9.5u V3 10 IRG4PC50S R3 0.001 D2 MBR1540 C2 25uH 100nF L2 2 1 300u L1 2
V1 80V C3 1uF
Figura 4. 44 Schema de simulare PSpice a invertorului rezonant
125
Modelarea convertoarelor n comutaie_______________________________________________
Sursele de comand a celor dou tranzistoare IGBT au fost modelate astfel nct tranzistoarele s comute la frecvena de rezonan a circuitului paralel. Aadar pentru tranzistorul Z1 sursa V2 care l comand este caracterizat de: V1=-10V, V2=10V, Td=0, Tr= 0,01us, Tf= 0,01us, PW=3us, PER= 9,5us iar pentru tranzistorul Z2 sursa V3 care l comand este identic cu meniunea c Td= 3us astfel asigurnd un timp mort ntre conducia celor dou tranzistoare. Formele de und obinute la simularea invertorului se prezint n figurile urmtoare.
100V
0V
-100V 5.0A 0A -5.0A SEL>>
V(C2:2)
920us I(L2)
930us
940us Time
950us
960us
Figura 4. 45 Tensiunea pe condensator i curentul prin bobina circuitului rezonant paralel
42.00V
40.00V
38.00V SEL>> 36.25V V(V2:-,C1:2) 1.0A
0A
-1.0A 920.0us I(L1) 925.0us 930.0us Time 935.0us 940.0us
Figura 4. 46 Tensiunea i curentul pe circuitul serie
126
Universitatea Tehnic din Cluj-Napoca_______________________________________________
1.0A
0A
-1.0A 1.0A
I(V1)
0A
SEL>> -1.0A 791us IC(Z1)
800us IC(Z2)
810us Time
820us
827us
Figura 4. 47 Curentul absorbit de la sursa de alimentare sus, curenii de colector prin tranzistori
10V 0V -10V V(R2:1) 100V V(R1:1,C1:1)
0V
SEL>> -100V 791.1us V(C2:2)
800.0us V(V1:+,C1:1)
810.0us Time
820.0us
826.8us
Figura 4. 48 Semnalele de comand sus i tensiunea pe condensator i tensiunea colector-emitor pe tranzistor
Aa cum se observ i n figurile anterioare invertorul funcioneaz cu comutaie la tensiune zero iar valorile tensiunii i curentului pe circuitul rezonant sunt superioare valorilor sursei de alimentare. Privind la circuitul de impedan se observ c valoarea curentului ce trece prin circuitul serie, este mult inferioar valorii curentului din circuitul rezonant, ceea ce duce la protecia ntregului sistem.
127
Modelarea convertoarelor n comutaie_______________________________________________
4.3.1 Implementarea practic
Implementarea practic a invertorului are la baz schema electric prezentat n anexa 4-4 i studiul prezentat anterior. Deoarece este necesar ca partea de fora a circuitului i partea de comand sa fie separate, soluia adoptat a fost folosirea unor optocuploare ntre partea de comand realizat cu ajutorul microcontrollerului C508 i circuitul specializat de comand a tranzistoarelor de putere IR2110. Scopul aplicaiei propuse este de a obine rezonana de curent pe circuitul oscilant LC, rezultnd astfel, o form de und a curentului prin bobina L2 a invertorului sinusoidal i de aplitudine 5A aa cum a reieit n urma simulrii invertorului cu platforma Matlab implementat. Standul experimental pentru invertorul rezonant este prezentat n figura 4.49.
Figura 4. 49 Stand experimental al invertorului rezonant
Deoarece optocuploarele alese inverseaz semnalele PWM primite de la microcontroler soluia aleas a fost aceea de a inversa semnalele generate prin setarea strii iniiale a pinului CC0 n high i a pinului COUT0 n low. Figurile urmtoare prezint semnalele PWM astfel generate pentru fiecare frecven aleas.
a)
b) 128
Universitatea Tehnic din Cluj-Napoca_______________________________________________
c)
d)
Figura 4. 50 Semnalele PWM generate din microcontroller: a) 50kHz, b) 75kHz, c) 100kHz, d) 150kHz
Figura 4. 51 Formele de und pe circuitul rezonant al invertorului alimentat la 30V i comandat la frecvena de rezonan: CH1 Tensiunea msurat cu o sond cu atenuare de 10; CH2 curentul prin bobin msurat cu o sond de 100mv/A.
Figura 4.51 prezint o captur a formelor de und de la ieirea invertorului achiziionate cu un osciloscop Techtronix cu o band de 60MHz i o rat de eantionare de 1Gs/sec. Aceste forme de und au fost obinute aplicnd la intrarea invertorului o tensiune de 30 V i comanda tranzistoarelor pe 100kHz. Se observ c valoarea maxim a tensiunii este de 25V iar curentul 1A. Privind forma de und a semnalelor, acestea tind spre un sinus, dar datorit frecvenei de comutaie uor sub frecvena de rezonan a circuitului, acesta nu oscileaz corespunztor.
129
Modelarea convertoarelor n comutaie_______________________________________________
Figura 4. 52 Formele de und pe circuitul rezonant al invertorului alimentat la 80V i comandat la frecvena de rezonan: CH1 Tensiunea msurat cu o sond cu atenuare de 10; CH2 curentul prin bobin msurat cu o sond de 100mv/A.
Figura 4. 53 Semnalele de comand la intrarea optocuploarelor (stnga) i semnalele de comand dup circuitul IR2110
Figura 4.54 prezint formele de und ale invertorului rezonant alimentat la 80V i comandat la frecvena de rezonan a circuitului paralel, observm c s-au obinut pentru tensiune o valoare de vrf de aproximativ 88V, iar pentru curent o valoare de vrf de aproximativ 5A. Comparnd valorile obinute experimental, cu valorile obinute n urma simulrilor Matlab i PSpice putem spune c rezultatele msurate experimental coincid cu cele obinute prin simularea acestui invertor i astfel, platforma Matlab implementat, este de asemenea validat i prin rezultate experimentale.
130
Universitatea Tehnic din Cluj-Napoca_______________________________________________
4.4 Concluzii i contribuii personale
Acest capitol trateaz invertoarele monofazate cu und dreptunghiular la ieire sau cu circuit rezonant pe partea de sarcin. Construcia invertoarelor are la baz braul de semipunte monofazat, dar este necesar ca acest bra s conin dou comutatoare bidirecionale care funcioneaz n contratimp, astfel nct mrimea alternativ de la ieire s aib valoare medie nul. Un studiu asupra invertoarelor monofazate n punte cu und dreptunghiular la ieire, din punct de vedere a modului de comand a fost realizat. Pe baza simulrilor realizate asupra circuitului, se poate concluziona c, n cazul unei comenzi simetrice transferul de putere dinspre invertor nspre sarcin este maxim, dar o modificare a puterii transmise sarcinii se poate realiza doar dac valoarea tensiunii continue de alimentare se modific. Astfel, comanda asimetric permite un control al puterii trimise sarcinii prin reglarea defazajului dintre semnalele de comand a celor dou brae de semipunte, fr a fi nevoie de o modificare a tensiunii de alimentare. Raportndu-ne la invertoarelor rezonante, acestea au un comportament diferit prin natura circuitului de sarcin. Astfel, n funcie de tipul circuitului RLC serie sau paralel, se obin pe circuitul de sarcin rezonane de curent sau tensiune, n cazul n care invertorul este comandat la frecvena de rezonan a oscilatorului. Din punct de vedere a comenzii acestor invertoare, comanda sincron ofer un transfer maxim de putere sarcinii i totodat datorit comutaiei la tensiune ori curent zero se reduc pierderile la comutaia dispozitivelor de putere. Reglarea puterii n sarcin se poate realiza printr-o comand asincron cu trecerile prin zero ale curentului ori tensiunii, n funcie de raportul dintre frecvena de comutaie i frecvena de rezonan a circuitului de sarcin. Un raport supraunitar indic totodat o funcionare a circuitului n zona inductiv, ceea ce face ca puterea transmis sarcinii s fie mai mare dect n cazul unui raport subunitar, ce ar duce la o comportare n regim capacitiv. O alt mrime ce prezint un interes n analiza i dimensionarea unor astfel de invertoare o reprezint factorul de calitate al circuitului RLC. Un factor de calitate ridicat, asigura o eficien ridicat a invertorului rezonant. Astfel, nainte de a implementa un invertoar rezonant, o serie de factori sunt necesari a fi luai n considerare. Un studiu asupra fenomenelor ce se petrec n momentul funcionrii este deasemenea indicat. Modelarea corect a acestor circuite poate duce la o evaluare exact a valorilor mrimilor de interes n timpul funcionrii, ceea ce duce la o dimensionare corect a componentelor i la un algoritm de control eficient n funcie de aplicaia dat. Datorit puterilor relativ mari la care astfel de circuite se proiecteaz i a frecvenelor ridicate ce se impun la ora actual, utilizarea unor controllere pe partea de comand este pe lng o necesitate i o soluie atractiv datorat preului de cost tot mai sczut i a multiplelor metode de comand i reglaj ce pot fi implementate. 131
Modelarea convertoarelor n comutaie_______________________________________________
Dintre contribuiile personale aduse asupra acestui capitol se pot meniona: Analiza metodelor de comand asupra invertoarelor cu und dreptunghiular la ieire n funcie de tipul sarcinii i de tipul comenzii ramurii de invertor; Modelarea matematic i implementarea unei platforme Matlab pentru simularea invertoarelor rezonante n semipunte; Modelarea matematic i implementarea unor platforme Matlab pentru invertoarele rezonante n punte cu sarcina R-L-C, att comandate sincron ct i asincron Implementarea unei platforme Matlab pentru determinarea valorilor n regim staionar a invertoarelor rezonante i a caracteristicilor acestora Modelarea i implementarea unei platforme Matlab de simulare, a invertoarelor n clas D cu sarcin serie-paralel Propunerea unei topologi a invertoarelor rezonante n clas D i implementarea acestora Dezvoltarea unui program pentru microcontrollerul C508 pentru comanda invertorului rezonant propus
Ca direcii viitoare de dezvoltare autorul i propune s dezvolte aplicaia prezentat n vedere realizrii unui invertor rezonant pentru puteri mai mari de 1kW folosit pentru instalaii de nclzire prin inducie i mbuntirea algoritmilor de control astfel nct comanda invertorului s se realizeze pe frecvena de rezonan indiferent de variaiile sarcinii.
132
Universitatea Tehnic din Cluj-Napoca_______________________________________________
[1] N. Palaghita Dispozitive semiconductoare de putere, partea I, Editura Mediamira Cluj-Napoca, 2002, ISBN 973-9358-96-9 [2] F. Ionescu, D. Floricau, S. Nitu, Jean-Paul Six, Philippe Delarue, C. Bogus Electronica de putere, Convertoare statice, Editura Tehnica Bucuresti, 1998, ISBN 973-311262-3 [3] R. W. Erickson , D. Maksimovic , Fundamental of Power Electronics Second Edition, Library of Congress, ISBN 0-7923-7270-0, 2001 [4] N. Palaghita, D. Petreus, C. Farcas Electronica de putere, partea a II-a, Editura Mediamira Cluj-Napoca, 2004, ISBN 973-713-039-1 [5] D. Alexa, L.Gatlan, F. Ionescu, A. Lazar Convertoare de putere cu circuite rezonante, Editura Tehnica Bucuresti, 1998, ISBN 973-31-1245-3 [6] Gacsadi Alexandru, Electronic de putere, Universitatea din Oradea, 2009
[7] Kazimierczuk M.K., Czarkowski D. Resonant Power Converters, John Willy&Sons,
Inc. New York, 1995, ISBN 0-471-04706-6 [8] V. Popescu Electronica de putere, Editura de Vest Timisoara, 1998, ISBN 973-360306-6 [9] John O.Attia Electronics and circuit analysis,CRC Press 1999, ISBN 0-8493-1176-4 James W. Nilsson, Susan A. Riedel Electric circuits, Prentice-Hall 2001, 2000, 1996, ISBN 0-13-032120-6 [10] N. Golovanov, I. Sora ,s.a. Electrometrie si electrotehnologii, vol. I Electrometrie, Editura Tehnica Bucuresti, 1997, ISBN 973-31-1144-9 [11] S.Arumugam, S.Ramareddy, Computer Simulation of Class D Inverter Fed Induction Heated Jar, Journal of Theoretical and Applied information Technology 2009 [12] J.M.Rivas, Y. Han, O.Lietermann, A.Sagneri, D.J.Perreault, A High-Frequencz Resonant Inverter Topologz with Low Voltage Stress, IEEE, 1-4244-0655-2/07, 2007
[13] A.Suresh, S. RamaReddy, Parallel Resonance based Current Source Inverter for Induction Heating, European Journal of Scientific Research, ISSN 145-216X, Vol.58 No.2 (2011) [14] Muhammad H. Rashid Power electronics circuits, devices, and aplications, second
edition, Prentice-Hall 1988, ISBN 0-13-334483-5 [15] Ovidiu Pop, Adrian TAUT, Analysis and simulation of power inverter with load variation for induction heating applications, 33rd International Spring Seminar on Electronics Technology, May 12-16, 2010, Poland, Warsaw
133
Modelarea convertoarelor n comutaie_______________________________________________
[16] Adriana Buruian, Adrian TAUT, Ovidiu Pop, Anamaria Matei, Digital Control Algoritm for DC-DC Converter, The 6TH Symposium for Students in Electronics and Telecomunications, 27 May 2010, Cluj-Napoca, Romnia [17] Ionel H. BACIU, Adrian TAUT, Ovidiu POP, Serban LUNGU Advanced Simulation of a Load Variation in Induction Heating Systems, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic [18] Ovidiu POP, Adrian TAUT Analysis and Simulation of a Half-Bridge Inverter, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic [19] Lucian Man, Ovidiu Pop, Adrian TAUT- Packaging and Thermal Analysis of a Power Inverter for Induction Heating Applications SIITME 2010 IEEE 16th International Symposium for Design and Technology in Electronic Packaging September 23-26,2010 Pitesti, Romania. [20] Adrian TAUT, Ovidiu Pop, Serban Lungu, Power Transformers Model used for Inverters Simulation SIITME 2010 IEEE 16th International Symposium for Design and Technology in Electronic Packaging September 23-26,2010 Pitesti, Romania [21] R Sheffer, Fundamentals of Power Electronics with Matlab, ISBN 1-58450-852-3 [22] S. Lungu , I. Baciu , Comparison Between Different Method to Obtain the Solution for Differential Equation of Half Bridge Inverter , IEEE 2008 [23] S.T.Karris, Circuit Analzsis II with Matlab Aplications, Orchard Publications, California, ISBN 0-9709511-9-1, USA [24] O Pop, Influence of power consumption over the input current harmonics pollution for a half-bridge power inverters,ISSE 2008, pp.312, 2008 [25] D. Petreus, G. Muntean, Z. Juhos, N. Palaghita Aplicatii cu microcontrolere din familia 8051, Editura Mediamira Cluj-Napoca, 2005, ISBN 973-713-014-6
134
Universitatea Tehnic din Cluj-Napoca_______________________________________________
5 Simularea i implementarea experimental a unui sistem cu convertor n punte H i circuit de corecie a factorului de putere
Acest capitol trateaz problema coreciei active a factorului de putere ntr-un ansamblu redresor, convertor ridictor, convertor n punte H ce alimenteaz o sarcin de putere relativ mare, de exemplu, un motor de curent continuu. Schema de principiu a sistemului propus este prezentat n figura 5.1, unde se evideniaz blocurile necesare implementrii aplicaiei propuse.
Figura 5. 1 Schema bloc a unui sistem de acionare a unui motor de curent continuu
Una din problemele ridicate la implementarea unui astfel de sistem din punctul de vedere al sarcinii, este sursa de putere care va alimenta convertorul n punte H, ce urmeaz s controleze motorul. Datorit puterii relativ mari necesar sarcinii, s-au luat n considerare diferite variante de alimentare a convertorului n punte H, innd cont de standardele de reglementare ale armonicilor de curent absorbit de la reeaua de alimentare, i anume, standardul EN61000-3-2 revizuit n anul 2010 i prezentat n anexa 5-1. Cum majoritatea consumatorilor ce utilizeaz tensiunea reelei sunt alimentai cu ajutorul unui redresor cu filtru capacitiv, o prim etap n implemetarea sursei de putere a fost dimensionare unui astfel de redresor, care s asigure puterea necesar sarcinii, de 1kW. Problematica acestor redresoare monofazate i trifazate, comandate i necomandate este dat de faptul c, introduc armonici de curent ntr-o reea electric de distribuie. Astfel, simulrile PSpice a unui redresor cu filtru capacitiv care s furnizeze o putere de 1kW sarcinii, prezentate n figura 5.2, ilustreaz curentul de intrare de o form nesinusoidal, adic impulsuri de curent pe fiecare semiperioad a tensiunii.
135
Modelarea convertoarelor n comutaie_______________________________________________
D1 Dbreak V1 VOFF = 0 VAMPL = 110 FREQ = 50
I V+
D3 Dbreak C1
I
{c}
V-
R1 I 10
D2 Dbreak
D4 Dbreak
a)
V(D2:2,D4:2)
100V 0V -100V V(D2:2,D4:2) 10A 0A -10A -I(V1) 100V 50V 0V V(R1:2) 10A 5A 0A -I(R1) 1.0KW SEL>> 0W 0s
100V SEL>> -100V V(D2:2,D4:2) 20A 0A -20A -I(V1) 100V 50V 0V V(R1:2) 10A 5A 0A -I(R1) 1.0KW 0.5KW
10ms RMS(I(R1)*V(R1:2)) 20ms Time 30ms 40ms
100V 0V -100V 100A 0A -100A -I(V1) 100V 50V 0V V(R1:2) 10A 5A 0A -I(R1) 1.0KW SEL>> 0W 0s
0W 0s
10ms RMS(V(R1:2)*I(R1))
20ms Time
30ms
40ms
10ms RMS(V(R1:2)*I(R1))
20ms Time
30ms
40ms
10A
10A
20A
5A
5A
10A
0A 0Hz -I(V1)
0.2KHz
0.4KHz Frequency
0.6KHz
0.8KHz
1.0KHz
0A 0Hz -I(V1)
0.2KHz
0.4KHz Frequency
0.6KHz
0.8KHz
1.0KHz
0A 0Hz -I(V1)
0.2KHz
0.4KHz Frequency
0.6KHz
0.8KHz
1.0KHz
b)
c)
d)
Figura 5. 2 Simulare PSpice a redresoarelor monofazate: a) schema de simulare; b) simulare cu R C = 0,1 ; c) simulare cu R C = 1 ; d) simulare cu R C = 10
Din rezultatele obinute n urma simulrii PSpice a acestor redresoare, observm c pentru a obine puterea dorit n sarcin e nevoie de un filtru capacitiv de valori ridicate, ceea ce duce la prezena unor armonici superioare de valori mari, prezentate n tabelul 5.1. Raportndu-ne la un regim pur sinusoidal, puterea activ definit ca: P = U I cos [W ] , indic faptul c, factorul de putere (PF) poate fi exprimat ca fiind valoarea defazajului dintre tensiunea i curentul de intrare n circuit, PF = cos . n cazul unui regim n care tensiunea este sinusoidal de forma u = U sin t , iar curentul este nesinusoidal, ca n cazul redresoarelor, putem exprima factorul de putere ca fiind de forma:
PF =
unde : K p =
U rms I1rms cos I1rms = cos = K p cos U rms I rms I rms
(5.1)
I1rms , K p [0,1] descrie componentele armonice ale curentului cu raportate la I rms
armonica fundamental, iar PF depinde att de unghiul ct i de componentele armonice. I1rms 136
Universitatea Tehnic din Cluj-Napoca_______________________________________________
n
este valoarea efectiv a fundamentalei curentului, iar I rms =
I
i =1
2 i
este valoarea efectiv total.
Dac defazajul ntre fundamentala curentului i tensiunea de intrare este = 0 atunci putem rescrie ecuaia (5.1) ca fiind: PF = I1rms I rms (5.2)
O alt mrime ce caracterizeaz regimul nesinusoidal este factorul de distorsiuni armonice (Total Harmonic Distortion - THD) ce prin definiie are expresia:
THD =
I
n=2
2 n , rms
I1rms
I rms 2 I1rms 2 I1rms
100
(5.3)
n aceeai msur este simplu de artat legtura dintre THD i Kp sau factorul de putere. Kp = 1 1 + THD
2
(5.4)
PF =
1 THD 1+ 100
2
(5.5)
Astfel, putem spune c doar componenta armonic fundamental contribuie la puterea activ, celelalte componente armonice superioare contribuie doar la creterea valorii efective a curentului de intrare i la creterea puterii reactive.
Tabel 5. 1 Valorile componentelor armonice obinute n urma simulrii redresoarelor cu filtru capacitiv
Armonica
RC 0,1 1
12,6 A 146 uA 3,62 A 147 uA 2,05 A 138 uA 1,02 A 146 uA 941 mA 145 uA 34% 0,94
10
18,3 A 160 uA 15,1 A 169 uA 9,9 A 122 uA 4,73 A 73 uA 1,88 A 109 uA 102% 0,7
1 2 3 4 5 6 7 8 9 10 THD PF
10,6 A 81uA 98 mA 74 uA 79 mA 56 uA 72 mA 39 uA 68 mA 25 uA 1,5% 0,99
137
Modelarea convertoarelor n comutaie_______________________________________________
Aadar, implementarea sursei de putere cu un redresor dubl alternan cu filtru capacitiv nu este o soluie acceptat n raport cu standardul de reglementare. Deoarece convertorul Boost ofer un control bun asupra factorului de putere, fapt datorat prezenei inductanei la intrarea acestuia, s-a trecut la o simulare a convertorului n vederea implementrii sursei de putere ce urmeaz a alimenta convertorul n punte H. Astfel, convertorul a fost proiectat pentru a furniza la ieire o tensiune constant de 200V i pentru a asigura o putere pe sarcin de 1,5kW, alimentat fiind de la o surs de tensiune alternativ, printr-un redresor. Rezultatele simulrii PSpice asupra convertorului Boost, sunt prezentate n figurile urmtoare.
D3 MBR1540 V3 VOFF = 0 VAMPL = 100 FREQ = 50
I
D4 MBR1540
L1 1 10m
I
D2 2 MBR1540 M3 C1 IRF640 300u
V
V+
R1
26
V-
D5 MBR1540
D6 MBR1540
V1 = 0 V2 = 10 TD = 0 TR = 0.01u TF = 0.01u PW = 14u PER = 20u
V2
a)
40A
0A
-40A I(V3) 40A
40A
20A
20A
0A I(L1) 212.5V 200.0V SEL>> 180.0V 170ms 175ms V(D2:2)
0A 0Hz
180ms 185ms Time 190ms 195ms 200ms
0.2KHz I(V3)
0.4KHz Frequency
0.6KHz
0.8KHz
1.0KHz
b)
Figura 5. 3 Simulare PSpice a convertorului Boost: a) schema de simulare; b) rezultatele obinute pentru curentul de intrare (sus), curentul prin bobin (centru), tensiunea de ieire (jos) [stnga], spectrul curentului de intrare [dreapta]
Figura 5.3 prezint formele de und ale tensiunii de ieire, curentului prin bobin i a curentului absorbit de la reeaua de alimentare, a) i spectrul curentului de intrare b), iar valorile componentelor spectrale sunt date n tabelul 5.2, de unde rezult un factor total de distrorsiuni armonice THD = 42,3%.
138
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Tabel 5. 2 Valorile componenentelor spectrale ale curentului absorbit de la reea n urma simulrii convertorului Boost din figura 5.5
Pornind de la valorile pe care standardul de reglementare a armonicilor curentului de intrare EN61000-3-2, le stabilete pentru sursele a cror putere de ieire este mai mare sau egal cu 1kW, s-a realizat o comparaie ntre valorile obinute n urma simulrilor redresoarelor cu filtru capacitiv, convertorului boost alimentat de la o tensiune sinusoidal i standardul n vigoare. Rezultatele sunt prezentate n figura 5.4.
Comparatie-componente spectrale
35 30 25 20 Valoarea Armonicei[A] 15 10 5 0 1 3 5 Armonica 7 9 Standard Redres w=0.1 Redres w=1 Redres w=10 Boost
Figura 5. 4 Comparaie ntre componentele spectrale obinute i standard
Aadar, n urma comparrii valorilor obinute cu valorile de reglementare ale standardului EN61000-3-2, nici varianta implementrii sursei de putere folosind convertorul Boost, nu este optim, din punct de vedere a armonicilor curentului de intrare. Soluia adoptat a fost implementarea convertorului Boost cu un preregulator pentru corecia factorului de putere.
5.1 Convertorul Boost cu corecia factorului de putere
O schem simplificat a unui convertor boost alimentat de la un redresor monofazat, cu un preregulator pentru controlul factorului de putere este prezentat n figura 5.5. Astfel, la intrarea convertorului se aplic o tensiune redresat, iar convertorul este controlat pentru a menine pe sarcin, o tensiune continu constant, indiferent de variaiile curentului de sarcin ori a tensiunii alternative la intrarea redresorului. 139
Modelarea convertoarelor n comutaie_______________________________________________
Figura 5. 5 Schema de principiu a unui convertor Boost cu corecia factorului de putere.
Principiul de funcionare al acestui convertor este simplu i analiza acestuia este similar cu cea prezentat n capitolul trei. Preregulatorul funcioneaz la o frecvena de comutaie mult mai mare dect frecvena reelei, controlnd tensiunea de ieire prin bucla exterioar de tensiune i determinnd forma curentului de intrare prin bucla interioar de curent.
5.2 Strategii de control al curentului si corecia activ a factorului de putere.
n vederea rezolvrii problemei propuse, aceea de implementare a convertorului boost cu corecia factorului de putere, s-au studiat diferite metode de control a curentului: controlul valorii de vrf, controlul curentului prin histerezis, controlul cu comutaie la curent zero, controlul valorii medii a curentului. Deoarece n urma studiului, am considerat c metoda de control a valorii medii, este una din metodele ce prezint o fiabilitate ridicat pentru aplicaia noastr am ales implementarea convertorului cu corecia factorului de putere folosind aceast metod prezentat n cele ce urmeaz, celelalte metode fiind prezentate n anexe.[1][2][4][18][19][20]
140
Universitatea Tehnic din Cluj-Napoca_______________________________________________
5.2.1 Preregulatoare cu controlul valorii medii a curentului
Principiul metodei controlului valorii medii a curentului este ilustrat n figura urmtoare:
L D1 iI(t) uI (t) D2 CS R1 D IS
k1uI redr(t)
Comutator
+ + -
k0uS(t)
-
RS
R2
iL
D3
D4
uc-da(t)
um(t)=f(IL) CP RZ RIN uref I(t) _ uerr(t) + Amplificator de eroare a curentului CR RR _ uAEU(t) Amplificator de eroare a tensiunii + UREF CZ + _ Modulator PWM
t[ms] 0 5 10
Figura 5. 6 Schema de principiu a unui preregulator cu controlul valorii medii a curentului i forma de und a curentului prin bobina convertorului Boost
Tensiunea um (t ) de la ieirea traductorului de curent este comparat cu semnalul de referin uref 1 (t ) . Referina pentru amplificatorul de eroare se obine prin nmulirea unei fraciuni din tensiunea de reea redresat k1u Iredr (t ) cu tensiunea de la ieirea regulatorului PI. Datorit componentelor alternative ale tensiunii de ieire, diferena dintre tensiunea de referin i tensiunea de ieire trebuie mediat. Aceasta se relizeaz cu un regulator PI, a crui funcie de transfer este: F (s) = 1 + 1 s Ti (5.6)
iar, tensiunea la ieirea regulatorului PI este dat de relaia: u AEU (t ) = 1 + (U REF k0 us (t ))dt
Ti
(5.7)
Ieirea amplificatorului de eroare uerr (t ) este folosit ca intrare n modulatorul PWM. Pentru obinerea semnalului de comand de tip PWM, tensiunea de eroare este comparat cu un semnal dinte de fierstru. Avantajele pe care aceast metod le are sunt: frecven constant de comutaie, nu avem nevoie de o ramp de compensaie, controlul este mai puin sensibil la zgomotul de comutaie (datorit filtrrii curentului), factor de putere foarte bun i THD mic 141
Modelarea convertoarelor n comutaie_______________________________________________
deoarece bucla de control a curentului foreaz curentul de intrare s fie proporional cu tensiunea reelei, perturbaiile de mod diferenial sunt reduse, datorit riplului mic al curentului de intrare, forma curentului este mai bun dect la controlul valorii de vrf a curentului, deoarece n apropierea trecerilor prin zero a tensiunii de reea, factorul de umplere este aproape de unu, reducndu-se astfel unghiul mort pentru curentul de intrare. Ca dezavantaje se pot preciza: pierderile la comutaia direct sunt mai mari dect n cazul convertoarelor care lucreaz la limita conduciei ntrerupte, valoarea bobinei este uor mai mare dect n cazul convertoarelor care lucreaz la limita conduciei ntrerupte.
5.3 Proiectarea convertorului Boost cu corecia factorului de putere prin metoda valorii medii a curentului
Pentru implemetarea practic a convertorului ridictor de tensiune s-a folosit ca circuit de comand, circuitul specializat realizat de productorul de echipamente electronice Texas Instruments, UC3854. Ca date de proiectare s-a luat n considerare un preregulator cu controlul valorii medii a curentului, a crui tensiune de intrare poate s varieze n domeniul 50-100Vef. Astfel amplitudinea tensiunii de intrare va varia n domeniul 70,5-141V, asigurnd cu ajutorul convertorului Boost o tensiune de ieire Us de 200V i o putere de 1,5kW. [19][22][23] Privind din punct de vedere al convertorului Boost i tiind c pe durata de conducie a comutatorului bobina nmagazineaz energie iar pe durata de blocare a acestuia cedeaz energia acumulat sarcinii, este important de determinat factorul de umplere, ce se definete ca fiind raportul dintre timpul de conducie al comutatorului Ton i perioada de comutaie Ts. innd cont c tensiunea de intrare este un sinus redresat, pe parcursul unei semiperioade a tensiunii de reea, timpul de conducie variaz. D= Ton T ( ) U s U I ( ) = ; D ( ) = on ; = I t Ts Ts Us (5.8)
tiind c tensiunea pe bobina convertorului Boost o putem exprima ca fiind valoarea acesteia multiplicat cu derivata curentului prin bobin n timp, putem explicita relaia pentru un unghi pe perioada ct tranzistorul conduce. uL = L diL di ( ) ; u L ( ) = U I ( ) = L L dt dt (5.9)
142
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Din relaia (5.9) se poate scoate uor riplul curentului prin bobin la un unghi . nlocuind n relaia (5.8) Ts = 1 D ( ) rezult c timpul de conducie la un unghi este Ton ( ) = . Astfel fs fs U ( ) [U s U I ( )] U I ( ) D( ) = I fs L f s L U s
expresia pentru riplul curentului o putem scrie ca: iL ( ) = (5.10)
Valoarea minim a inductanei bobinei convertorului boost astfel nct s nu se depeasc riplul maxim admis de curent este dat de: Lmin = U ( ) [U s U I ( )] U I ( ) D ( ) = I f s iL (max) ( ) f s U s iL (max) ( ) (5.11)
Pornind de la faptul c se dorete o frecven de comutaie a tranzistorului convertorului Boost de 50kHz, tensiune variabil la intrare n domeniul 50-100Vef, tensiune de ieire 200V, putem dimensiona att preregulatorul ct i componentele convertorului Boost. Curentul maxim ce parcurge bobina este dat de relaia (5.12), iar transpus aplicaiei propuse se obine valoarea riplului curentului exprimat n relaia (5.13). 2 Ps (max) 2 1500 I L (max) = U (min) = 50 2 = 42 A I I = 2 Ps (max) = 2 1500 = 21A L U I (max) 100 2 I L (max) I L (max) I L (max) I L (max) I L (max) I L (max) ; [ 0;1] 0.1 42; 4.2 A 0.3 42; 12.6 A 0.1 21; 2.1A 0.3 21; 6.3 A (5.13)
(5.12)
Valoarea minim a curentului de intrare este dat de relaia (2.32) cu specificaia c am limitat valoarea riplului curentului prin bobin la 10%:
143
Modelarea convertoarelor n comutaie_______________________________________________
I L (max) I L (max)tot = I L (max) + 2 4.2 = 44.1A I L (max)tot = 42 + 2 2.1 I L (max)tot = 21 + 2 = 23.05 A
(5.14)
Avnd valorile curentului se poate dimensiona bobina convertorului, pornind de la relaia (5.15), relaie ce indic valoarea minim a acesteia. U I(min) (Us U I(min) ) L min > f s U s I L (max) 70.5 (200 70.5) L min > 50 200 4.2 103 = 217.37 H
(5.15)
Valoarea inductanei obinute din formula (5.15) ne indic valoarea minim a inductanei pe care bobina trebuie s o aib astfel nct convertorul s funcioneze n regim nentrerupt. Pentru realizarea bobinei, este important s determinm volumul de miez necesar, dat de relaia (5.16), relaie n care inducia maxim n miezul magnetic este Bmax = 0, 4[T ] , permeabilitatea efectiv are valoarea e 100 i permeabilitatea vidului 0 = 4 107 . Deoarece nu se dorete o funcionare n regim ntrerupt ori la grania celor dou regimuri de funcionare a convertorului, se impune o bobin a crei valoare s fie aproximativ 800 H , mult peste valoarea limit a bobinei rezultat n urma relaiei (5.15). Ve = 0 e
2 L IL 2 Bmax
(5.16)
Condensatorul de ieire a convertorului Boost se dimensioneaz conform relaiei 5.17, impunnd un riplu maxim al tensiunii de ieire n jurul valorii de 20V i un randament n jurul valorii de = 0.9 : C0 min = C0 min Ps PI = I Us U s 2 fi U s U s
1500 = = 1,3mF 2 3.14 50 0.9 200 20
(5.17)
Deoarece curentul care strbate bobina este acelai cu curentul ce trece prin tranzistor, este necesar ca acesta s poate funciona optim la valorile maxime ale curentului i tensiunii aplicate pe el. Astfel tranzistorul ales pentru circuitul propus este un tranzistor CMOS 40N60C3 produs de
144
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Infineon Technologis, caracterizat prin tensiunea dren surs de 650V i curent de dren de 50A. Dioda care este necesar s ndeplineasc aceleai cerine ca i comutatorul i astfel s-a ales o diod ultra-rapid 60APU04 produs de International Rectifier caracterizat printr-un curent pe care l poate conduce de 60A i o tensiune de polarizare invers admis de 400V. Schema electric a circuitului este prezentat n figura 5.7, figur ce evideniaz i circuitul integrat UC3854.
D1 Punte Redresoare Inductor 1 2 ac1+ - ac2 D1B4B1 47n60c3 C_f ilt_intrare 1u/450v C_f ilt_out1 C_f ilt_out2 4 3 1 400u 2 60APU40 R_div 1 470k POT 1 1K GBL639 470u/250v 470u/250V OUTPUT R_div 2 18k J2 1 2 60APU40 D2 Alternativ 1 2 J1
R_masura 27m
D3 D1N4148 R2.7k Cp R_rms1 270k R_iac 160k Rz Cz C_pk 100p 1 R_pk2 2 100p 1k 3 4 18k 2.2n R+ 2.7k R_rms2 8 100k R_rms3 C_rms1 470n C_rms2 2.2u UC3854 18k R_pk1 7.5k Rp 5 6 7 U1 GND PKLMT CAOUT ISNS MULTOUT IAC VAOUT VRMS GTDRV VCC CT SS REST VSNS ENA VREF 16 15 14 13 12 R_set 10k 11 10 Alimentare uc 9 Cr 220n Rr 37k R_10/1 68k R_10/2 22k 1 2 J3 Ct 2.2n D4 D02CZ16 R_gate 10 R14 2.7k
Cs 100n
0
37k
Figura 5. 7 Schema electric a convertorului Boost cu corecia factorului de putere
Schema intern a circuitului UC3854 este prezentat n figura 5.8, iar detaliile acestui circuit precum i dimensionarea componentelor sunt discutate n cele ce urmeaz.
Figura 5. 8 Schema intern a circuitului integrat UC3854
145
Modelarea convertoarelor n comutaie_______________________________________________
Schema intern a circuitului integrat UC3854, prezentat n figura 5.8, evideniaz prezena unui amplificator de tensiune, un divizor/multiplicator analogic, un amplificator de curent i un bloc de generare a semnalului PWM cu o frecven fix. Se poate spune astfel, raportndu-ne la schema de principiu a unui convertor boost cu corecia factorului de putere prin metoda controlului valorii medii a curentului, ilustrat n figura 5.6, c prin intermediul acestui circuit integrat sunt asigurate toate blocurile de care este nevoie n realizarea convertorului. Pentru a reui s determinm i s monitorizm valoarea curentului prin bobin putem utiliza ca traductor de curent o rezisten, nseriat n circuitul bobinei pe firul de mas. Calculul valorii traductorului de curent se reduce la relaia (5.18), dorind s asigurm o cdere de tensiune pe rezistena de msur de 1V, astfel limitm puterea disipat i sensibilitatea la zgomot.
Figura 5. 9 Msurarea curentului prin bobin
U Rmas = R_ masura I L 1V = R_ masura 46 A R_ masura 22m
(5.18)
Deoarece puterea disipat pe rezistena de msur este relativ mare 50W soluia adoptat const n conectarea n paralel a 10 rezistene de 0.22 capabile fiecare s disipe 9W . Deasemenea este foarte important s limitm valoarea maxim a curentului care poate s treac prin circuitul nostru, iar circuitul integrat UC3854 ofer posibilitatea de a bloca tranzistorul atunci cnd valoarea instantanee a curentului depete limitele admise. Protecia circuitului la supracurent este asigurat printr-un divizor de tensiune conectat ntre pinii 2 i 9 ai circuitului de comand i se realizeaz atunci cnd potenialul n pinul 2 coboar sub limita impus de fabricant, de zero voli. Pinul 9 al circuitului integrat asigur tensiunea de referin a acestuia i este limitat la valoarea de 7,5V.
Figura 5. 10 Limitarea la supracurent
146
Universitatea Tehnic din Cluj-Napoca_______________________________________________
R_ masura I lim R_ pk1 R_ pk 2 = U REF 0.022 48 A R = R_ pk1 R_ pk 2 = 0.140 R_ pk1 _ pk 2 7.5V
(5.19)
Dac impunem curentului prin divizor s nu depeasc valoarea de 1mA atunci putem calcula valoarea celor dou rezistene din relaia (5.19) i: U REF + R_ masura I lim R_ pk 2 + R_ pk1 = 1mA 7.5 + 1.056 R = 8.55k _ pk 2 + R_ pk 1 = 1mA
(5.20)
Alegnd R_ pk1 = 7.5k rezult o valoare pentru R_ pk1 = 1k . Pentru creterea imunitii la zgomot ntre pinul doi al circuitului integrat si pinul 1 de mas am introdus un condensator de valoare mic, C_ pk = 100 pF . Intrarea 11 a circuitului integrat UC3854, este intrarea inversoare a amplificatorului de tensiune. Cu ajutorul acestei intrri se nchide bucla de tensiune a convertorului ridictor.
Figura 5. 11 Reeaua de feed-back a tensiunii de ieire
Dac ne raportm la figura 5.6, se poate observa c amplificatorul de eroare a tensiunii are reacia asigurat de un filtru RC de ordinul nti. Comparativ cu frecvena de comutaie la care funcionez convertorul, limea de band a buclei de tensiune este mic, astfel nct, principala cerin pentru bucla de control a tensiunii este de a pstra distorsiunile de intrare la valori minime. Limea de band a buclei de control a tensiunii, trebuie s fie suficient de mic pentru a atenua armonica a doua a frecvenei reelei asupra condensatorului de ieire pentru a putea pstra modulaiile curentului de intrare la valori mici. Schema amplificatorului de eroare a tensiunii este prezentat n figura 5.12.
147
Modelarea convertoarelor n comutaie_______________________________________________
Figura 5. 12 Amplificatorul de eroare pentru controlul tensiunii
Pentru o dimensionare corect a rezistenelor divizorului de tensiune de la ieirea convertorului boost se poate scrie:
R_ div1 U U out = 1 + R_ div 2 REF R_ div1 R_ div1 200 = 1 = 25.66 7.5 200V = 1 + R R_ div 2 7.5 _ div 2
(5.21)
Impedana echivalent din reacia amplificatorului de eroare a tensiunii este dat de relaia (5.22). 1 s Cr Rr Z r = Rr || Cr = = 1 1 + s Rr Cr Rr + s Cr Rr Funcia de transfer de semnal mic a amplificatorului de eroare are valoarea:
(5.22)
Rr U AEU Z Rr 1 + s Cr Rr 1 = r = = = AAEU ( s ) = U out R_ div1 R_ div1 R_ div1 + s Cr Rr R_ div1 R_ div1 + sCr R_ div1 Rr
(5.23)
Privind funcia de transfer a amplificatorului de eroare pentru controlul tensiunii, se observ prezena unui pol la frecvena: p = 1 . Rezistena Rr stabilete amplificarea n curent Cr Rr
continuu a amplificatorului de eroare, iar n cazul n care lipsete, amplificarea se reduce la: AAEU ( s ) = 1 . Aa cum reiese i din funcia de transfer, rezistena R_ div 2 nu are nici o s Cr Rdiv _1
influen asupra ctigului de semnal mic deoarece pe intrarea neinversoare a amplificatorului de eroare este conectat tensiunea de referin, iar prin R_ div 2 nu va trece nici o component de curent
148
Universitatea Tehnic din Cluj-Napoca_______________________________________________
alternativ. Condensatorul Cr din reacia amplificatorului se calculeaz cu ajutorul relaiei (5.24), lund n considerare ctigul amplificatorului la dublul frecvenei reelei: Cr = 1 2 2 f I R_ div1 AAEU (2 f I ) (5.24)
Banda de frecven a buclei de tensiune trebuie calculat astfel nct s fie mai mic dect riplurile liniei de alimentare pentru a minimiza distorsiunile. Aadar, polul p trebuie plasat dup sau la frecvena de tiere a buclei de tensiune pentru a asigura o atenuare suficient a riplurilor de intrare i o margine de faz acceptabil. Din cele enunate, putem calcula valoarea rezistenei Rr ca fiind: Rr = 1 2 f T Cr (5.25)
unde, fT este frecvena de tiere a buclei de tensiune ce se calculeaz cu relaia: fT = Ps (max)
( 2 )
R_ div1 Cr C filt _ out U out U AEU
(5.26)
Putem calcula astfel valorile componentelor buclei de tensiune. Dac considerm
R_ div 2 = 18k n serie cu poteniometrul POT = 1k , cu ajutorul cruia se face reglajul fin al
tensiunii de ieire, va rezulta o rezisten R_ div1 = 470k . Amplificarea amplificatorului de eroare la dublul frecvenei o putem calcula dac admitem ca distorsiunile datorate armonicii a treia s nu depeasc o valoare i impunnd riplul maxim admis a tensiunii de ieire.
U AEU AAEU (2 f I ) = U out A (2 f ) = 0.03 4 = 0.012 I AEU 10
(5.27)
unde, U AEU este variaia la ieirea amplificatorului de eroare i este dat de productorul circuitului integrat ca fiind de 4V. 1 220n Cr = 2 3.14 100 470 103 0.012 1500 21.4 Hz fT = 2 3 ( 2 3.14 ) 470 10 220 109 103 200 4 1 Rr = 37 k 6.28 21.4 220 109
(5.28)
149
Modelarea convertoarelor n comutaie_______________________________________________
Simularea amplificatorului de eroare a tensiunii a condus la urmtoarele rezultate prezentate n figura 5.14.
Cr 220n Us Rr R1 Us Uref V2 7.5 OUT Uref + out 470k 39k
V3 1Vac 200Vdc
R2 18k
Figura 5. 13 Schema de simulare a amplificatorului de eroare a tensiunii.
a)
b)
Figura 5. 14 Funcia de transfer: a) caracteristica de amplitudine;b) caracteristica de faz
Ieirea amplificatorului de eroare a tensiunii se regsete la intrarea A a multiplicatorului divizorului care are rolul cel mai important n obinerea unui factor de putere ridicat. Intrarea B a multiplicatorului este asigurat de un curent proporional cu tensiunea de intrare (iAC), iar intrarea C este asigurat de ptratul tensiunii de feedforward (uRMS). Ieirea multiplicatorului reprezint referina amplificatorului de eroare a curentului. Curentul iAC(t) se obine prin intermediul rezistenei R_iac. Productorul recomand un curent maxim la intrarea multiplicatorului de 0.6mA, astfel asigurm un curent maxim la intrarea multiplicatorului de 0.5mA. Potenialul pinului 6 (IAC) conform datelor de catalog a integratului este 6V. Rezistena R_iac se poate calcula cu relaia: 2 U Ief U I AC R_ iac = iAC 2 100 6 = 270k R_ iac = 0.5 103
(5.29)
150
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Deoarece trebuie asigurat un curent de polarizare la intrarea iAC a circuitului integrat i atunci cnd tensiunea de intrare este n apropiere de zero, aceast intrare trebuie conectat prin intermediul unei rezistene Rp, care se calculeaz ca fiind un sfert din rezistena R_iac. R_ iac Rp = 4 R = 270k 68k p 4
(5.30)
Intrarea C a multiplicatorului este asigurat de reeaua de feedforward care este interpus ntre borna de plus a punii redresoare i borna de mas. Tensiunea uRMS recomandat de productorul integratului este n intervalul 1.4V - 4.5V, tot ce depete aceast valoare ducnd la pierderea funciei de feedforward.
Figura 5. 15 Reeaua de FeedForward
Aa cum se poate observa i n figura 5.15 tensiunea uRMS este proporional cu valoarea efectiv a tensiunii de alimentare, iar reeaua de feedforward este format dintr-un divizor rezistiv format din cele trei rezistene R_rms1, R_rms2 i R_rms3, i un filtru de ordinul doi format cu ajutorul celor dou condensatoare C_rms1 i C_rms2. Relaia care stabilete valoarea potenialului pinului 8 uRMS este dat de: uRMS = R_ rms 3 R_ rms1 + R_ rms1 + R_ rms1 0.707 U Ief (5.31)
Deoarece tensiunea de intrare este variabil n domeniul 50Vef-100Vef ,potenialul uRMS poate fi calculat lund n considerare valorile limit la care funcioneaz reeaua de feedforward: R_ rms 3 0.707 50V 1.5V uRMS = R_ rms1 + R_ rms1 + R_ rms1 R_ rms 3 u = 0.707 100V 4.5V RMS R_ rms1 + R_ rms1 + R_ rms1 rezultnd astfel valorile R_ rms 2 = 100k , R_ rms1 = 270k , potenialul uRMS fiind:
(5.32)
Pentru a reui s meninem activ funcia de feedforward am ales R_rms3 ca fiind 18k
151
Modelarea convertoarelor n comutaie_______________________________________________
18k uRMS = 18k + 100k + 270k 35.35 1.6 1.4 18k u 70.7 3.3 4.5 RMS = 18k + 100k + 270k
(5.33)
Dac ne raportm la atenuarea reelei de feedforward aceasta este asigurat doar de cele trei rezistene, nefiind influenat de valoarea celor dou condensatoare. Atenuarea n curent continuu este dat de: R_ rms 3 uRMS = 20 lg Arms = 20 lg U Ired R_ rms1 + R_ rms 2 + R_ rms 3 18k Arms = 20 lg 26dB 18k + 100k + 270k
(5.34)
La alegerea condensatoarelor Crms1 i Crms2 trebuie pus condiia ca la dublul frecvenei reelei (2f1=100Hz) s avem o atenuare de -80dB. Cele dou condensatoare dau frecvena celor doi poli care apar, iar frecvena celor doi poli o alegem astfel nct la 100Hz s putem obine atenuarea de -80dB dorit. Relaiile dup care se calculeaz condensatoarele sunt date de:
1 C_ rms1 = 2 f R p1 _ rms 2 1 C _ rms 2 = 2 f p 2 R_ rms 3
(5.35)
Pentru a obine atenuarea de -80 dB la dublul frecvenei reelei s-a trecut la o simulare a circuitului de feedforward punnd condiia ca cei doi poli s aib aceai frecven de 3,7 Hz. Circuitul simulat este prezentat n figura 5.16, iar calculul funciei de transfer este deasemenea prezentat.
1 1 470n = C_ rms1 = 2 f R 2 3.14 3.7 100k p1 _ rms 2 1 1 C 2.2 = _ rms 2 = 2 f p 2 R_ rms 3 2 3.14 3.7 18k Funcia de transfer este dat de:
H ( s) = s C_ rms1 C_ rms 2 R_ rms 2 R_ rms 3 + s
2
(5.36)
R_ rms 2 R_ rms1
(5.37)
C_ rms 2 R_ rms1
( R_ rms 2 R_ rms 3 + R_ rms1 R_ rms 3 + R_ rms1 R_ rms 2 ) + 1
152
Universitatea Tehnic din Cluj-Napoca_______________________________________________
1 rms = C _ rms1 C _ rms 2 R_ rms 2 R_ rms 3 1 23.17 Hz rms = 470 2.2 100 18 109 f p = rms 3.7 Hz 2
Pulsaia este dat de:
(5.38)
Figura 5. 16 Schema de simulare a reelei feedforward; caracteristica de amplitudine a reelei feedforward
Conform informaiilor furnizate de productor, curentul de ieire maxim al multiplicatorului se stabilete prin intermediul rezistenei RSET, n concordan cu relaia (5.39): 3.75 I mult = R _ set I = 3.75 = 375 A mult 10k
(5.39)
Aa cum s-a enunat anterior, metoda controlului valorii medii a curentului const n msurarea i filtrarea curentului prin bobina L a convertorului boost, cu ajutorul amplificatorului de eroare al curentului. Intrarea neinversoare a amplificatorului de eroare a curentului, care este de obicei un amplificator diferenial pentru a reui reducerea perturbaiilor de mod comun din traseul de mas, este asigurat de ieirea multiplicatorului care furnizeaz prescrierea de curent. Schema amplificatorului de eroare a curentului este prezentat n figura 5.17, iar funcia de transfer de semnal mic este prezentat de asemenea.
153
Modelarea convertoarelor n comutaie_______________________________________________
Figura 5. 17 Amplificatorul de eroare a curentului.
Curentul la ieirea multiplicatorului este dat de relaia: imult (t ) = km iAC (u AEU (t ) 1) 2 u RMS (t ) (5.40)
unde, km este o constant a multiplicatorului egal cu unu. Funcia de transfer de semnal mic a amplificatorului de eroare a curentului este dat de:
AAEC ( s ) =
1 + s Rz C z C C s R (C z + C p ) 1 + s Rz z p Cz + C p
(5.41)
Analiznd aceast relaie, se observ c funcia de transfer a amplificatorului de eroare a curentului are un zero i doi poli. Se poate rescrie ecuaia (5.41) sub urmtoarea form:
s 1+ z AAEC ( s ) = i s 1+ s p 1 = i R (Cz + C p ) 1 z = R C z z C p + Cz p = Rz C z C p
(5.42)
unde, z reprezint zeroul, iar p reprezint unul din cei doi poli, cellalt fiind nul. Dac lum n calcul faptul c condensatorul C p << C z , atunci putem scrie: i
1 i p R Cz
1 . Rz C p
Pentru a asigura o reducere a sensibilitii la zgomot, polul vp ar trebui plasat n apropierea sau dup frecvena de comutaie a convertorului. Astfel, acesta nu va afecta rspunsul buclei de
154
Universitatea Tehnic din Cluj-Napoca_______________________________________________
curent n frecven. Zeroul trebuie plasat la o frecven ct mai mic pentru a asigura o margine de faz suficient. Frecvena de tiere a buclei de curent este dat de relaia: fs fTi = 2 3 f = 50 10 = 7.96kHz Ti 2 3.14
(5.43)
Dac alegem o rezisten Rz = 18k , i considerm frecvena zeroului ca fiind la jumtatea frecvenei de tiere a buclei de tensiune rezult: fs 50 103 = 4kHz fz = 4 4 3.14 2 Cz = 2 = = 2.2n 3 f s Rz 50 10 18 103 Frecvena polului o alegem s fie n jurul valori de 75kHz astfel rezultnd: 1 C p = 2 1,5 f R s z 1 C = 100 p p 2 3.14 1,5 50 103 18 103 Simularea amplificatorului de eroare a tensiunii este prezentat n figurile alturate:
(5.44)
(5.45)
Figura 5. 18 Schema de simulare a amplificatorului de curent.
155
Modelarea convertoarelor n comutaie_______________________________________________
a)
b)
Figura 5. 19 Funcia de transfer: a) caracteristica de amplitudine;b) caracteristica de faz
Setarea frecvenei de comutaie a comutatorului convertorului este dat de relaia: 1.25 fs = R C t _ set C = 1.25 t 10k 50k
(5.46) 2.2n
Schema de simulare a ntregului circuit i rezultatele obinute sunt prezentate n figurile urmtoare.
Figura 5. 20 Schema de simulare a convertorului boost cu corecia factorului de putere
156
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Tensiunea de referin pentru amplificatorul de eroare este dat de relaia:
t 1 uref 1 (t ) = ki uI redr (t ) u AEU (t ) = 0, 01 uI redr (t ) 200V uS (t ) + ( 200V uS ( ) ) d 0, 04 0
(5.47) Tesiunea redresat este divizat cu 100 cu ajutorul blocului ELAPLACE. Pentru msurarea curentului prin bobin am folosit o surs de tensiune comandat n tensiune. Regulatorul PI are funcia de transfer 1 + 1 , fiind implementat cu o surs comandat n tensiune, care citete 0,04 s
tensiunea pe o rezisten de msur. Semnalul de la ieirea amplificatorului de eroare este folosit ca intrare a generatorului PWM. Generarea semnalului PWM s-a realizat prin compararea semnalului de eroare cu un semnal dinte de fierstru, iar pentru modelul comparatorului s-a folosit un bloc diferenial urmat de blocul GLIMIT, care amplific cu 1000 ieirea blocului diferenial i o limiteaz la +10V, respectiv 0V. Ieirea comparatorului este conectat la comutatorul convertorului Boost. Simulrile asupra acestui convertor au fost realizate pentru o putere transmis sarcinii de 400W. Figurile urmtoare prezint rezultatele simulrii convertorului iar n final se prezint o comparaie ntre armonicile rezultate n urma simulrii i clasa D a standardului de reglementare ce permite puteri de pn la 600W.
Figura 5. 21 Formele de und ale tensiunii aplicat la intrare (stnga) i a curentului absorbit de la reea (dreapta)
157
Modelarea convertoarelor n comutaie_______________________________________________
Figura 5. 22 Detaliu a curentului prin bobin (stnga); spectrul armonicelor curentului de intrare (dreapta)
Figura 5. 23 Formele de und ale tensiunii de comand i a tensiunii pe sarcin Tabel 5. 3 Valorile componentelor spectrale rezultate n urma simulrii convertorului rezultnd un TOTAL HARMONIC DISTORTION = 7.130644E+00 PERCENT HARMONIC FREQUENCY FOURIER NORMALIZED PHASE NORMALIZED NO (HZ) COMPONENT COMPONENT (DEG) PHASE (DEG) 1 5.000E+01 2.930E+01 1.000E+00 1.786E+02 0.000E+00 2 1.000E+02 4.791E-03 1.635E-04 7.098E+01 -2.861E+02 3 1.500E+02 1.694E+00 5.780E-02 -4.347E+00 -5.400E+02 4 2.000E+02 6.898E-03 2.354E-04 5.968E+01 -6.545E+02 5 2.500E+02 9.558E-01 3.262E-02 -1.030E+01 -9.031E+02 6 3.000E+02 9.089E-03 3.102E-04 1.086E+02 -9.627E+02 7 3.500E+02 6.288E-01 2.146E-02 -1.668E+01 -1.267E+03 8 4.000E+02 8.819E-03 3.010E-04 1.364E+02 -1.292E+03 9 4.500E+02 4.331E-01 1.478E-02 -3.096E+01 -1.638E+03 10 5.000E+02 1.073E-02 3.661E-04 -1.547E+02 -1.940E+03
Din tabelul 5.3, unde se prezint valorile componentelor spectrale ale curentului de intrare a rezultat un THD=7,13%, ceea ce duce la un PF=0,997. Comparnd cu valorile exprimate n standard pentru puteri de pn la 600W s-a observat c convertorul se ncadreaz n aceast clas.
158
Universitatea Tehnic din Cluj-Napoca_______________________________________________
30 25 20 Standard 15 10 5 0 1 3 5 7 9 Simulare
Figura 5. 24 Comparaie ntre standard i rezultatele simulrii
Realizarea practic a convertorului are la baz schema din figura 5.7 cu dimensionarea componentelor aa cum s-a prezentat anterior. Tensiunea de intrare este variabil n domeniul 50100V efectiv, frecvena de comutaie este setat n jurul valorii de 50kHz, iar tensiunea de ieire este de 200V. Formele de und obinute n urma funcionrii convertorului boost cu corecia factorului de putere sunt prezentate n figurile urmtoare.
Figura 5. 25 Forma de und a tensiunii de intrare Ch1 cu atenuare de 10, forma de und a curentului absorbit de la reea Ch2 cu atenuare de 10, msurat cu o sond de curent 100mV/A (stnga); Forma de und a tensiunii de intrare Ch1 cu atenuare de 10, forma de und a curentului absorbit de la reea Ch2, msurat cu o sond de curent 100mV/A (dreapta)
159
Modelarea convertoarelor n comutaie_______________________________________________
Figura 5. 26 Anvelopa curentului de intrare la 50Hz (stnga); Detaliu a curentului absorbit de la reea (dreapta)
Figura 5. 27 Forma de und la ieirea pinului 14 a circuitului integrat. Semnalul dinte de fierstru (stnga); Forma de und n grila tranzistorului. Semnalul PWM de comand (dreapta).
Figura 5. 28 Tensiunea Dren-Surs (stnga); Riplul tensiunii de ieire (dreapta)
160
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 5. 29 Stand experimental al convertorului Boost cu corecia factorului de putere.
Figura 5. 30 Formele de und ale unui redresor cu filtru capacitiv cu w=10; stand experimental a unui redresor
n urma implementrii convertorului, s-a ridicat un set de msurtori experimentale pentru a detalia funcionarea convertorului. Din considerente de aparatur msurtorile au fost realizate pentru o putere de 80W, iar rezultatele msurtorilor sunt prezentate n tabelul 5.4.
161
Modelarea convertoarelor n comutaie_______________________________________________
Tabel 5. 4 Valori msurate asupra convertorului Boost cu corecia factorului de putere Tensiunea de Curentul de Puterea la Tensiunea de Curentul la Puterea la intrare intrare intrare iesire iesire iesire Randamentul 45 50 55 60 65 70 75 80 85 90 95 100 2,07 1,86 1,65 1,47 1,38 1,26 1,17 1,11 1,02 0,96 0,9 0,84 93,15 93 90,75 88,2 89,7 88,2 87,75 88,8 86,7 86,4 85,5 84 198 198 198 199 199 199 199 199 199 199 199 199 0,396 0,396 0,396 0,398 0,398 0,398 0,398 0,398 0,398 0,398 0,398 0,398 78,4 78,4 78,4 79,2 79,2 79,2 79,2 79,2 79,2 79,2 79,2 79,2 0,843 0,843 0,86 0,89 0,88 0,89 0,9 0,89 0,91 0,91 0,92 0,94
Comparnd rezultatele obinute n urma simulrii i implementrii practice a convertorului putem spune c soluia aleas i metoda de implementare au fost corect corelate. Din punct de vedere a standardului de reglementare cu privire la distorsiunilor introduse n reea, se poate afirma c rezultatele obinute n urma implementrii practice a convertorului Boost se ncadreaz n standardul de reglementare.
5.4
Convertor n punte H
Structura n punte H cu dispozitive semiconductoare controlabile nu este utilizat n electronica de putere doar pentru realizarea convertoarelor c.c-c.c cu funcionare n patru cadrane. Aceast topologie este folosit, de asemenea, pentru obinerea invertoarelor sau a redresoarelor PWM, ori a filtrelor active monofazate. Aa cum se prezint n figura 5.31 puntea H este format din dou brae de punte, notate cu A i B, fiecare bra fiind constituit din dou tranzistoare de putere (MOSFET, IGBT, BJT, etc) legate n serie i prevzute cu diode de descrcare n antiparalel.
162
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Figura 5. 31 Topologia unei puni H pentru comanda unui motor de curent continuu.
Tranzistoarele din braul A sunt notate cu T1 i T2, iar cele din braul B cu T3 i T4, iar diodele n antiparalel cu fiecare tranzistor au fost notate cu aceleai cifre dup cum urmeaz: D1, D2 pentru braul A i D3, D4 pentru braul B. Alimentarea structurii se face de la o singur surs care furnizeaz tensiunea continu Ud bine filtrat. Ct mai aproape de puntea H se prevede obligatoriu capacitatea Cd care, pe lng rolul de filtru al tensiunii, are funcia important de a prelua energiile descrcate din cmpul inductanelor de sarcin dup fiecare comand de blocare a tranzistoarelor. Avnd n vedere c tranzistoarele comut n timpi foarte scuri trebuie utilizate condensatoare rapide cu rezisten serie echivalent sczut (Low ESR Equivalent Series Resistance). Punctele mediane ale celor dou brae notate cu A, respectiv B sunt i bornele de ieire ale structurii ntre care se leag sarcina activ a convertorului de tip R-L-E (motorul Mcc). Tensiunea de la ieirea convertorului s-a notat cu ue, iar curentul cu ie. Comanda tranzistoarelor din fiecare bra se face cu o pereche de semnale modulate n lime (PWM) complementare. n funcie de cum sunt corelate comenzile celor dou brae A i B pot fi puse n eviden dou tehnici (strategii) de comand ale punii H: Comanda PWM cu o comutaie bipolar a tensiunii la ieirea punii; Comanda PWM cu o comutaie unipolar a tensiunii la ieirea punii .
Cele dou tehnici enumerate mai sus pot fi utilizate, att pentru chopper-ul n punte H,ct i pentru invertorul sau redresorul PWM monofazat. Toate aceste convertoare vor lucra diferit, n funcie de tehnica utilizat iar calitatea conversiei se schimb de la o tehnic la alta.
163
Modelarea convertoarelor n comutaie_______________________________________________
5.4.1 Implementarea convertorului n punte H
Pentru acionarea unui motor de curent continuu, s-a realizat o punte H capabil s ndeplineasc cerinele motorului de curent continuu. Schema electric a convertorului n punte H este prezentat n figura 5.32 iar componentele ce alctuiesc convertorul sunt de asemenea prezentate. Scopul final al convertorului care lucreaz la frecvena de 40kHz, este acela de a reui s acioneze motorul n ambele sensuri i totodat s aib control asupra vitezei de rotaie i a curentului prin nfurarea rotoric a motorului. Ca element de comand a convertorului n punte H s-a folosit un microcontroler produs de Infineon, modelul C508 compatibil cu standardul 8051.
+5V
J4
+5V Com1 +12V
J3
+20V
J2
Alimentar e
ISO1 R3
PWM 1
2 470
M_OC
8 7 6
R8 1k
1 2 CON2
1 2 CON2
1 2 CON2
R7 1k
C5 100n U3 7 6 5 3
3 4 1 5 6N137 C1 100n
R15 10 HO
9 10
VDD VB HIN VS SHDN LIN VCC
0
+5V
SHDN1
11 12 13
C6 220n
D1 MBR1045
SEN S1 +15V
Alimentar e
ISO2 R4
PWM 1-2
T1 C7 220n R16 10
Com1- 2 Com1 Com2
T3 IRFP450 J1
2 470
M_OC
8 7 6
R10 1k
R9 1k
2 VSS COM 1 LO 4 4 8 8 14 14
0
IR2110
IRFP450
3 4 1 5 6N137 C2 100n
SEN S1
1 2 Motor
SEN S2
0
+5V
0
T2
Com2- 2 Com1- 2 +5V Com2
T4 1 IRFP450
U5 LM7815C 3 IN GND OUT 2
+15V
IRFP450
ISO3 R5
PWM 2 +20V
C11 100u
2 470
M_OC
8 7 6
R12 1k
R11 1k
C8 100n 9 10
SHDN2
U4 HO VDD VB HIN VS SHDN 3 VCC 2 VSS COM 1 LO LIN 4 4 8 8 14 14 7 6 5
R17 10
0
C14 100u U7 LM7812C 3 1 IN GND OUT 2
R1 1
R2 1
0
+12V
3 4 1 5 6N137 C3 100n
11 12 13
C9 220n
D2 MBR1045
SEN S2 +15V +15V
0 0
+ 5
+5V +15V
C12 100u
0
+5V
0
1 U6 LM7805C 3 IN GND OUT 2
8 V+
VSDH 2
0
+5V
C10 220n R18 10
Com2- 2
ISO4 R6
PWM 2-2
0
8 7 6 R14 1k IR2110 R13 1k
OUT V6 TL082 U8B R19 1K SET = 0.5
2 470
M_OC
C13 100u
0
SHDN2
0
8 V+ + U8A TL082 3
3 4 1 5 6N137 C4 100n
0
VSDH 1
+15V
+5V
OUT V2 R20 1K SET = 0.5
0
+5V_PL
0
SHDN1
ISO5 R21 R22 1k
VSDH 1_PL
0
VSDH 1
R23 1k
8 7 6
2 470 3
+5V_PL
ISO6 C15 100n
M_OC
4 6N137 5
M_OC
R24
J6
VSDH 2 +5V
R25 1k
R26 1k
8 7 6
2 470
0
3 4 6N137 5
M_OC
1 2 CON2
CON8
VSDH 2_PL
1 2 3 4 5 6 7 8 J5
M_OC PWM 1 PWM 1-2 PWM 2 PWM 2-2 VSDH 1_PL VSDH 2_PL +5V_P L
C16 100n 1
M_OC
Title <Title> Size B Date: Document Number <Doc> Thursday, November 18, 2010 Sheet 1 of 1 Rev <RevCode>
Figura 5. 32 Schema electric de acionare a motorului de curent continuu cu convertor n punte H de tranzistoare
Aa cum se poate observa i n figura 5.32 puntea H este alctuit din tranzistoare de putere MOS care au incluse n structura lor intern diodele de descrcare n paralel cu jonciunea drensurs. Deoarece tensiunea de alimentare a punii este asigurat de convertorul boost prezentat n subcapitolul anterior, care furnizeaz la ieire o tensiune continu de 200V, iar motorul ce urmeaz a fi acionat se presupune c ar necesita un curent n regim de pornire ce depete valoarea de 10A, tranzistoarele convertorului n punte H, trebuie s fie capabile s comute o tensiune de 200V i s permit conducia unui curent peste valoarea de 10A. Astfel tranzistoarele alese sunt 164
Universitatea Tehnic din Cluj-Napoca_______________________________________________
tranzistoarele IRFP450 caracterizate printr-o tensiune dren surs UDS=500V, i un curent de dren de 18A. Comanda unui bra al punii se face cu ajutorul unui driver specializat de comand a tranzistoarelor de putere IR2110 capabil s preia semnalele PWM de amplitudine mic de la ieirea microcontrollerului i s le converteasc n semnale de comand pentru tranzistoarele de putere de amplitudini mult mai mari. n figura 5.48 este prezentat partea de comand a unui bra al punii i se poate observa c circuitul integrat este alimentat de la o surs de tensiune de 15V, iar tensiunea izolat VB de aproximativ aceeai valoare se obine printr-o conexiune de tip Bootstrap, din tensiunea de alimentare, printr-o diod ultrarapid caracterizat de o tensiune invers maxim peste valoarea tensiunii de alimentare a punii.
+5V
ISO1 R3
PWM1
+5V Com1
2 470
M_OC
8 7 6
R8 1k
R7 1k
C5 100n U3 7 6 5 3 2 1
3 4 1 5 6N137 C1 100n
R15 10 HO
9 10
VDD VB HIN VS SHDN LIN VSS 4 4 8 8 VCC COM LO 14 14
0
+5V
SHDN1
11 12 13
C6 220n
D1 MBR1045
SENS1 +15V
ISO2 R4
PWM1-2
2 470
M_OC
8 7 6
R10 1k
R9 1k
C7 220n R16 10
Com1-2
0
IR2110
3 4 1 5 6N137 C2 100n
Figura 5. 33 Partea de comand a unui bra a convertorului n punte H
Semnalele de la intrrile PWM, Hin i Lin, n circuitul IR2110 sunt asigurate de ctre microcontrollerul C508 prin intermediul unor optocuploare rapide 6n137, astfel asigurnd i o separare galvanic ntre circuitul de for i circuitul de comand. Anodul diodelor optocuploarelor este legat direct la un port al microcontrollerului care furnizeaz semnalele PWM de comand a tranzistoarelor cu frecvena de 40kHz. Limitarea valorii curentului prin rotorul motorului se face folosind un comparator neinversor aa cum se prezint n figura 5.34. Ieirea comparatorului este legat la intrarea de shutdown a circuitului IR2110 care ntrerupe automat comanda tranzistoarelor n momentul detectrii unui supracurent. Dei este suficient ca pinul de shut-down al circuitului integrat s fie conectat la un potenial pozitiv de tensiune pentru a opri funcionarea punii, aceeai ieire a comparatorului este regsit i la intrarea unui port al microcontrollerului, care va sista generarea semnalelor PWM de comand. Astfel protecia la supracurent a convertorului este asigurat pe 2 ci: 1blocarea tranzistoarelor cu ajutorul circuitului IR2110 i 2- sistarea semnalelor de comand PWM din microcontroller.
165
Modelarea convertoarelor n comutaie_______________________________________________
T2
Com2-2
IRFP450
R1 1
0
+15V
8 7
V+ +
+10V
VSDH2
OUT 4 V6 TL082 U8B R19 1K SET = 0.5
SHDN2
Figura 5. 34 Circuitul de protecie la supracurent.
Deoarece optocuploarele folosite inverseaz semnalele de la intrarea lor, a fost necesar o inversare a semnalelor PWM generate n microcontroler. Rezultatele obinute sunt prezentate n figurile urmtoare.
a)
b)
Figura 5. 35 Semnalele PWM de comand a tranzistoarelor din puntea H. a) la ieirea microcontrollerului, b) la ieirea optocuploarelor. Factor de umplere egal.
a)
b)
Figura 5. 36 Semnalele PWM de comand a tranzistoarelor din puntea H. A) la ieirea microcontrollerului, B) la ieirea optocuploarelor. Factor de umplere minim.
166
Universitatea Tehnic din Cluj-Napoca_______________________________________________
a)
b)
Figura 5. 37 Semnalele PWM de comand a tranzistoarelor din puntea H. A) la ieirea microcontrollerului, B) la ieirea optocuploarelor. Factor de umplere maxim.
Figura 5. 38 Semnalele PWM de comand a tranzistoarelor din puntea H la ieirea driverului de comand. Forma de und la ieirea convertorului n punte H msurat cu o sond de tensiune cu atenuare de 10.
Figura 5. 39 Stand experimental cu invertorul n punte H.
167
Modelarea convertoarelor n comutaie_______________________________________________
5.5 Concluzii i contribuii personale
n acest capitol se prezint implementarea practic a unui ansamblu redresor - convertor boost cu corecia factorului de putere convertor n punte H pentru comanda unui motor de curent continuu. Pornind de la problemele pe care le impune o surs de putere n reeaua de alimetare s-a trecut la un studiu asupra standardelor n vigoare. S-au studiat diferite aspecte ale redresoarelor i convertoarelor Boost i s-a propus implementarea unui convertor cu preregulator pentru controlul factorului de putere. Preregulatorul funcioneaz la o frecven de comutaie mult mai mare dect frecvena reelei i foreaz curentul de intrare s fie de aceeai form i n faz cu tensiunea reelei. Avantajele utilizrii preregulatoarelor constau n: mbuntirea factorului de putere (pn la 0,95-0,99); reducerea armonicilor (sub 3% dac este necesar); funcionarea ntr-un domeniu mare a tensiunilor reelei (90-270V); prestabilizarea tensiunii de ieire, suficient pentru ca etajul urmtor s fie supus la fluctuaii mici; un condensator de ieire mai mic i mai ieftin; reducerea valorii efective a curentului de ncrcare rezultnd o mbuntire a fiabilitii condensatorului. Pe baza studiului efectuat, s-au fcut simulri n PSpice pentru un convertor ridictor cu controlul valorii medii a curentului. De asemenea, s-a prezentat implementarea practic a unui convertor ridictor cu controlul valorii medii a curentului pentru o putere nominal de ieire de 1,5kW. Rezultatele simulrilor, precum i cele obinute experimental au fost prezentate n detaliu. Din reprezentarea grafic a componentelor spectrale ale curentului, comparativ cu limitele impuse de standardul EC61000-3-2 se observ c implementarea practic a convertorului respect cerinele impuse de standardul EC61000-3-2. n ultima parte a capitolului se prezint un studiu asupra convertoarelor n punte H folosite pentru acionarea unui motor de curent continuu. Implementarea practic precum i simulrile convertorului au fost prezentate n detaliu, iar algoritmul de comand al motorului de asemenea. Dintre realizrile personale aduse n acest capitol se pot preciza: aplicarea standardului EC61000-3-2 privind valorile maxime a armonicilor curentului de intrare la implementarea sistemului propus proiectarea i implementarea practic a unui convertor Boost cu corecia factorului de putere
168
Universitatea Tehnic din Cluj-Napoca_______________________________________________
studiul asupra comenzii convertoarelor n punte H i implementarea acestora dezvoltarea i implementarea software-ului de comand i control a convertorului n punte H Direciile viitoare de cercetare, propun implementarea unei platforme Matlab de simulare a ansamblului convertor ridictor cu corecia factorului de putere - convertor n punte H-motor de curent continuu.
169
Modelarea convertoarelor n comutaie_______________________________________________
5.6 Bibliografie selectiv
[1] Frca C., Petreu D., Palaghi N., mbuntirea factorului de putere n sistemele moderne de alimentare, Editura Risoprint, Colecia Scientia, Cluj-Napoca, 2003, pp. 62-77. [2] Tse C. K., Chow M. H. L., Cheung M. K. H., A Family of PFC Voltage Regulator Configurations with Reduced Redundant Power Processing, IEEE Transactions on Power Electronics, Vol. 16, No. 6, Nov. 2001, pp. 794-802. [3] Palaghi N., Petreu D., Frca C., Electronic de comand i reglaj, Editura Mediamira, Cluj-Napoca, 2006. [4] Petreu D., Lungu ., Surse n comutaie ndrumtor de laborator, Editura Mediamira, Cluj-Napoca, 1999. [5] Petreu D., Electronica surselor de alimentare, Editura Mediamira, Cluj-Napoca, 2002 [6] G. Mindru Teoria circuitelor electrice, Editura U.T. Pres Cluj-Napoca 2004, ISBN 973-662-110-3 [7] Robert W. Erickson, Dragan Maksimovic Fundamentals of power electronics second edition, Library of Congress, 2001, ISBN 0-7923-7270-0 [8] M.H. Rasid Power Electronics-Circuits, Devices and application, Prentice Hall, Englewood Cliffs, New Jersey, Second Edition. [9] Maksimovic D. Design of the clamped-curent high-power-factor boost rectifier, IEEE Trans. On Induatry Applications, vol.31, no.5, pp 986-991, Sept-Oct 1995. [10] Erickson R., Madigan M., S. Singer.- Desing of simple high power factor rectifier based on the flyback convertor, Applied Power Electronics Conference Proceedings, 1990, pp. 792-801. [11] Muresan M., Lungu Serban., Pop Ovidiu Modern education Methodsin Extracting Power Factor Preregulators, ISSE 2004, Sofia, Bulgaria, May 2004. [12] Frca C., Palaghi N., Petreu D., Juhos Z., Boost Power Factor Correction Preregulator Designed for a Plasmatron Power Supply, The 11th International Symposium for Design and Technology of Electronic Packages, SIITME 2005, Bucureti, Romania, 2225 September 2005, pp. 172-176, ISBN 973-713-063-4 Noon J.P., UC3855A/B High Performance Power Factor Preregulator, n Power [13] Supply Control Products, Texas Instruments, 2000, pp. 4.1344.153. [14] Basu S., Undeland T.M., Design Considerations for Optimizing Performance & Cost of Continuous Mode Boost PFC Circuits, 4th Nordic Workshop on Power and Industrial Electronics (NORPIE), 2004. [15] Petreu D., Frca C., A Comparison between some Different Current Control Methods for Power Factor Corrections Circuits, Proceedings of the 12th DAAAM International Symposium, Jena, Germania, 24-27th October 2001, pp. 363-364, ISBN 3901509-19-4.
170
Universitatea Tehnic din Cluj-Napoca_______________________________________________
[16] Rossetto L., Spiazzi G., Tenti P., Control Techniques for Power Factor Correction Converters, Proc. of Power Electronics, Motion Control (PEMC), September 1994, pp. 1310-1318. [17] Cathell F., Using Critical Conduction Mode for High Power Factor Correction, ON Semiconductor (AND8179/D), 2004. [18] ***, UC3854 High Power Factor Preregulator, n Power Supply Control Products, Texas Instruments, 2000, pp. 4.32 4.41. [19] ***, UC3854A/B Enhanced High Power Factor Preregulator, n Power Supply Control Products, Texas Instruments, 2000, pp. 4.424.47. [20] ***, Modeling, Analysis and Compensation of the Current Mode Converter, n Power Supply Control Products, Texas Instruments, pp. 3.5263.532, 2000. [21] ***, Practical Considerations in Current Mode Power Supplies, n Power Supply Control Products, Texas Instruments, pp. 3.5583.575, 2000. [22] ***, Power Factor Correction Handbook. Choosing the Right Power Factor Controller Solution, ON Semiconductor, 2004
171
Modelarea convertoarelor n comutaie_______________________________________________
6 Concluzii i contribuii personale
Problematica surselor de alimentare cu energie electric a circuitelor i aparatelor electronice suscit un interes deosebit n perspective evoluiei industriei electronice i implicit n modernizarea aparaturii din acest domeniu. O dimensionare corect a convertoarelor n comutaie reduce costul, volumul i pierderile datorate n special comutaiilor. Aadar, nainte de a fi proiectate, se impune o analiz riguroas asupra acestor tipuri de convertoare. n aceast tez este prezentat o metod modern de modelare a convertoarelor n comutaie, bazat pe ecuaii difereniale n vederea implementrii unor platforme Matlab de simulare i proiectare a acestor convertoare. Aceast metod implic cunoaterea topologiilor de circuit, astfel nct acestea s poat fi reduse la scheme echivalente pe care se pot scrie ecuaiile matematice aferente fiecrui interval de conducie sau blocare a comutatoarelor convertoarelor. De asemenea este necesar a se cunoate modul n care convertorul funcioneaz. Referindune la convertoarele c.c.-c.c. este important de tiut dac se dorete o funcionare n regim ntrerupt sau nentrerupt. Dac ne referim la convertoarele c.c.-c.a. este important s se cunoasc modul de comand ce st st la baza realizrii convertorului i forma semnalului de la ieire. Contribuiile personale ale autorului se regsesc cu preponderen n capitolele 3, 4 i 5, n care autorul prezint att modele matematice sub forma unor platforme Matlab, ct i realizri practice care valideaz aceste platforme. O prim etap se realizeaz n capitolul 2 unde autorul face un studiu asupra transformatoarelor n vederea validrii unui model care s fie utilizabil ntr-un domeniu larg de frecvene. n vederea validrii modelului matematic se implementeaz platforme Matlab de simulare a redresoarelor monoalternan, care tratateaz comportarea acestora din punct de vedere al sarcinii conectare la ieirea lor. n vederea validrii rezultatelor obinute se implementeaz o platform n Matlab de achizitie de date. Contribuiile personale aduse n cadrul acestui capitol sunt: Implementarea unui model matematic de transformator n vederea simulrii convertoarelor n comutaie Validarea modelului de transformator propus prin includerea acestuia n platformelor Matlab implementate de simulare a redresoarelor, mono i dublalternan Implementarea platformelor Matlab de simulare a redresoarelor pe baza modelelor ideale i reale ale diodelor.
172
Universitatea Tehnic din Cluj-Napoca_______________________________________________
n capitolul 3, autorul face o analiz a convertoarelor c.c.-c.c. n comutaie, n funcie de regimul de funcionare a acestora. Se pornete de la analiza n regim CCM a convertoarelor i se prezint particularitile regimului DCM pentru fiecare convertor. Se exprim un model matematic pe baza ecuaiilor difereniale ce descriu funcionarea acestor convertoare i se reprezint R T , n funcie de 2 L factorul de umplere al semnalului PWM de comand. Convertoarele c.c.-c.c. fr separare galvanic sunt simulate cu ajutorul unei platforme Matlab de proiectare, platform ce permite utilizatorului introducerea unor date elementare de proiectare cum ar fi: tensiunea de alimentare, tensiunea dorit pe sarcin, frecvena de lucru, curentul pe sarcin, variaia maxim admis a tensiunii de sarcin i a curentului prin bobina convertorului, precum i regimul de lucru n care se dorete a fi proiectat convertorul. Platforma Matlab returneaz formele de und ale curentului prin bobin, ale tensiunii pe condensatorul de filtraj ori a puterii debitate sarcinii i calculeaz valorile componentelor circuitului pentru datele de intrare furnizate. Astfel platforma returneaz valorile bobinei, ale condensatorului de filtraj ori a factorului de umplere necesar pentru a obine rezultatele impuse din datele de intrare. Totodat o platform Matlab de simulare a convertorului Buck n bucl nchis este prezentat, platform ce ajut n gsirea unui algoritm optim de control. n vederea validrii rezultatelor s-a implementat practic convertorul n bucl nchis folosind ca sistem de control un microcontroller din familia C508. Convertoarele cu separare galvanic ce necesit n componena lor un transformator, au fost de asemenea modelate prin ecuaii difereniale pornind de la modelul transformatorului propus n capitolul 2. Astfel platformele de simulare a convertoarelor Forward si Flyback au la baz modelul transformatorului i re turneaz formele de und ale mrimilor de interes. Contribuiile personale aduse asupra acestui capitol sunt: caracteristica de transfer n tensiune pentru diferite valori ale raportului Implementarea unei platforme Matlab de simulare a convertorului Buck n bucl nchis Validarea platformei prin implementarea practic a convertorului Modelarea n regim staionar a convertorului Boost Implementarea unei platforme Matlab de simulare i proiectare a convertoarelor c.c.-c.c. fr separare galvanic Implementarea unor platforme Matlab pe baza ecuaiilor difereniale i a modelului transformatorului prezentat n capitolul 2, n vederea simulrii convertoarelor cu separare galvanic de tip Forward si Flyback Implementarea unui algoritm de control n bucl nchis pe microcontrolerul C508 pentru convertorul Buck
173
Modelarea convertoarelor n comutaie_______________________________________________
n capitolul 4 se prezint un studiu asupra convertoarelor c.c-c.a. din punct de vedere a formei semnalului la ieirea acestora i a modului de comand. Astfel, se prezint un studiu asupra invertoarelor cu und dreptunghiular aratnd prin simulri Pspice, c n cazul unei comenzi asimetrice, se poate controla puterea transmis sarcinii, prim modificare decalajului semnalelor de comand cu un unghi , ceea ce n cazul unei comenzi simetrice ar implica modificarea tensiunii de alimentare a invertorului. Dac ne raportm la invertoarele rezonante, acestea au fost modelate n funcie de topologia de circuit i de tipul comenzii. Pornind de la un invertor rezonant n semipunte, acesta a fost modelat pe baza ecuaiilor difereniale i s-au implementat platforme de simulare a invertorului rezonant n vederea determinrii comportrii circuitului n momentul funcionrii. Considernd c sarcina invertorului poate fi variabil n momentul n care aceasta funcioneaz, s-a implementat o platform Matlab de simulare n bucl nchis, astfel nct comanda tranzistoarelor circuitului, s se realizeze la frecvena de rezonan a circuitului oscilant. Rezultatele obinute au demonstrat c n cazul unui astfel de invertor, transferul maxim de putere se realizeaz doar dac comanda este realizat n jurul frecvenei de rezonan a circuzitului oscilant. Invertoarele n punte au fost modelate analitic, iar soluiile tensiunilor i curentului circuitului de sarcin au fost exprimate n funcie de factorul de calitate Q al circuitului RLC. S-au dezvoltat platforme Matlab de simulare a invertoarelor rezonante n punte din punct de vedere al comenzii acestora. Astfel n cazul unei comenzi sincrone cu trecerile curentului prin zero, puterea transmis sarcinii este maxim. Din punct de vedere a comenzii asincrone s-au implementat platforme de simulare i s-a artat c n cazul unei perioade de comutaie mai mare dect perioada de rezonan transferul de putere este mai mare dect n cazul unui raport perioad de comutaie perioad de rezonan subunitar. Totodat autorul a realizat o analiz din punct de vedere a caracteristicilor acestor invertoare sub forma unei platforme Matlab ce returneaz valorile maxime ale tensiunii i curentului pe circuitul de sarcin n funcie de gradul de asincromatism cu care se comand invertorul. Implementarea invertoarelor n Clas D este de asemenea o contribuie proprie a autorului. Pornind de la o schem de principiu este realizat o platform Matlab de simulare a invertoarelor cu sarcin serie-paralel, privind comportamentul invertorului att din punct de vedere al funcionalitii acestuia ct i din punct de vedere al comportrii circuitului de sarcin n frecven. Se arat c o dimensionare corect a celor dou circuite, astfel nct s se urmreasc o rezonan n circuitul paralel face ca circutul serie s se comporte ca un circuit de adaptare. Validarea platformei Matlab implementat se verifi prin simulri PSpice asupra circuitului i prin msurtori experimentale realizate asupra invertorului cu sarcin serie-paralel implementat. Contribuiile aduse de autor n acest capitol sunt: Simularea i compararea rezultatelor invertoarelor cu und dreptunghiular la ieire, privind din punct de vedere al comenzii acestora
174
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Modelarea invertoarelor rezonante n semipunte i implementarea unei platforme de simulare Implementarea unei platforme de simulare a invertoarelor rezonante n semipunte n bucl nchis n vederea obinerii puterii maxime n sarcina invertorului Analiza matematic a invertoarelor n punte cu circuit rezonant serie din punct de vedere al factorului de calitate Implementarea unor platformelor Matlab de simulare a invertoarelor rezonante n punte, din punct de vedere al comenzii acestora Implementarea unei platforme Matlab pe baza ecuaiilor matematice deduse pentru un invertor n clasa D de funcionare cu sarcin serie-paralel Implementarea practic a invertorului rezonant n clas D cu sarcin serieparalel Implementarea unui algoritm de control a invertoarelor pe microcontrolerul C508
n capitolul 5 autorul un studiu asupra convertoarelor cu corecia factorului de putere n vederea simulrii i implementrii unui convertor n punte H folosit pentru comanda unor motoare de curent continuu de putere. Astfel se studiaz diferite variante de implementare a unei surse de putere i se propune implementarea unui convertor boost cu un preregulator n vederea coreciei factorului de putere prin metoda controlului valorii medii a curentului. Se detaliaz proiectarea convertorului boost i se prezint simulri realizate de autor asupra buclelor de control, de tensiune i de curent i asupra schemei convertorului cu preregulator. Rezultatele sunt comparate cu standardele e reglementare cu privire la armonicile curentului de intrare, iar rezultatele obinute sunt ncadrate corespunztor cu standardul n vigoare. Msurtorile experimentale realizate pe convertorul implementat conduc la obinerea unor randamente de peste 92% pentru o putere de sarcin de 80W. Implementarea convertorului n punte H precum i realizarea algoritmului de control pentru acesta sunt de asemenea realizri personale ale autorului. Aplicarea standardelor de reglementare a armonicilor curentului de intrare asupra sistemului propus Implementarea practic a unui convertor Boost cu corecia factorului de putere prin controlul valorii medii Implementarea practic a unui convertor n punte H i a algoritmului de control.
175
Modelarea convertoarelor n comutaie_______________________________________________
7 Bibliografie
[1] D. Alexa, L.Gatlan, F. Ionescu, A. Lazr Convertoare de putere cu circuite rezonante, Editura Tehnic Bucureti, 1998, ISBN 973-31-1245-3 [2] S. Arumugam, S. Ramareddy, Computer Simulation of Class D Inverter Fed Induction Heated Jar, Journal of Theoretical and Applied information Technology 2009 [3] John O. Attia Electronics and circuit analysis, CRC Press 1999, ISBN 0-8493-1176-4 [4] I. H. Baciu, A. Tut, O. Pop, . Lungu, Advanced Simulation of a Load Variation in Induction Heating Systems, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic [5] S. Basu, T.M. Undeland, Design Considerations for Optimizing Performance & Cost of Continuous Mode Boost PFC Circuits, 4th Nordic Workshop on Power and Industrial Electronics (NORPIE), 2004. [6] Johansson Bengt Improved models for DC-DC converters, Media-Tryck Sweden, 2003, ISBN 91-88934-29-2 [7] Keith Billings Switchmode power supply handbook, McGraw-Hill Companies, 1999, ISBN-13: 978-0-07-006719-6, ISBN-10: 0-07-006719-8 [8] A. Buruian, A. Tut, O. Pop, A. Matei, Digital Control Algoritm for DC-DC Converter, The 6TH Symposium for Students in Electronics and Telecomunications, 27 May 2010, Cluj-Napoca, Romnia. [9] C.A. Canesin, F. Gonvalves, L.P. Sampaio, Simulation Tools for Power Electronics Courses Based on Java Technologies, IEEE Transaction On Education, IEEE Education Society, Noiembrie 2010, Volumul 53, Numarul 4, ISSN 0018-9359 [10] F. Cathell - Using Critical Conduction Mode for High Power Factor Correction, ON Semiconductor (AND8179/D), 2004. [11] J. Chen, R. Erickson, D. Maksimovic, Averaged Switch Modeling of Boundary Conduction Mode DC-to-Dc Converters, Proc. IEEE Industrial Electronics Society Annual Conference (IECON 01), Nov.2001 [12] G. Chindri, A. Rusu - Proiectare asistat a circuitelor electronice - aplicaii-, Casa Crii de tiin, Cluj-Napoca, 2001. [13] G. Chindri, O. Pop, A. Grama, F. Hurgoi, ,,New PSpice Model for Power MOSFET Devices, Proceedings of ISSE 24 th International Spring seminar on Electronics, Climneti-Cciulata, Romnia, 5-9 May 2011, pp.158-162, ISBN 0-7803-7111-9, IEEE Xplore DOI 10.1109/ISSE.2001.931039 [14] K. M. Daugherty - Analog-to-Digital Conversion , McGraw-Hill , ISBN 0-07-015675-1 [15] P. Dobra, M. Trusca, D. Moga, D. Petreus , Stability Aspects in DC-DC Converters using PID Controller, Control Engineering and Applied Informatics, vol.9, Nr.1, pp: 3340, March 2007, ISSN 1454-8659. [16] Robert W. Erickson, Dragan Maksimovic Fundamentals of power electronics second edition, Library of Congress, 2001, ISBN 0-7923-7270-0. [17] Erickson R.- Dc-Dc Power Converters, tutorial article in Wiley Enciclopedia of Electrical and Electronics Engineering, 1998. [18] Erickson R., Madigan, S. Singer.- Desing of simple high power factor rectifier based on the flyback convertor,Applied Power Electronics Conference Proceedings,1990,pp.792-801
176
Universitatea Tehnic din Cluj-Napoca_______________________________________________
[19] R. W. Erickson, Some topologies of high quality rectifies, First International Conference on Energy, Power, and Motion control, May 5-6 1997. Tel Aviv, IsraelKeynote paper. [20] S. Erickson, R. W. Power source element and its properties, IEE ProceedingsCircuits Devices Sysatems, vol.141, no.3, pp. 220-226, June 1994. [21] C. Frca, D. Petreu, N. Palaghi - mbuntirea factorului de putere n sistemele moderne de alimentare, Editura Risoprint, Colecia Scientia, Cluj-Napoca, 2003, pp. 62-77. [22] C. Frca, N. Palaghi, D. Petreu, Z. Juhos, Boost Power Factor Correction Preregulator Designed for a Plasmatron Power Supply, The 11th International Symposium for Design and Technology of Electronic Packages, SIITME 2005, Bucureti, Romania, 22-25 September 2005, pp. 172-176, ISBN 973-713-063-4. [23] E. Fossas, G. Olivar, Study of Chaos in the Buck Converter , IEEE Transaction on Circuits and Systems-I: Fundamental Theory and Applications, vol. 43, no 1 January 1996. [24] Gacsadi Alexandru - Electronic de putere, Universitatea din Oradea, 2009. [25] A . Grama, A. Tut, O. Pop, Cad Tool for a Class E Tuned Power Amplifier Design, 34th International Spring Seminar on Electronics Technology, Slovakia, Mai 11-15 2011. [26] A. Grama, L. Grama, D. Petreu, C. Rusu, ,,Supercapacitor Modelling Using Experimental Measurements,Proceedings of ISSCS International Symposium on Signals, Circuits and Systems, Iai, Romnia, 9-10 July 2009, pp. 565-568, ISBN 978-1-4244-37856, IEEE Xplore DOI: 10.1109/ISSCS.2009.5206168. [27] A. Grama, D. Petreu, P. Borza, L. Grama- ,,Experimental Determination of Equivalent Series Resistance of Supercapacitor, Proceedings of ISSE 32th International Spring Seminar on Electronics Technologz, Brno, Cyech Republic, 13-17 Maz 2009, pp.1-4, ISBN 978-1-4244-4260-7, IEE Xplore DOI 10.1109/ISSE.2009.5207057. [28] A. Grama, G. Chindri, M. Murean, ,,Phase Locked Loop Simulated Using LabVIEW Programming Language,Proceedings of SIITME 10th International Szmposium for Design and Technology of Electronic Packaging, Bucharest,Romnia, 23-26 September 2004, pp.135-139, ISBN 973-9463-83-5. [29] A. Grama, G. Chindri, ,,Switch Mode Power Supply Design with Power MOSFET, Proceedings of SIITME 9th International Symposium for Design and Technology of Electronic Packaging, Timioara, Romnia, September 2003, pp.222-225, ISBN 97396592-6-8. [30] N. Golovanov, I. Sora ,.a. Electrometrie si electrotehnologii, vol. I Electrometrie, Editura Tehnic Bucureti, 1997, ISBN 973-31-1144-9. [31] Infineon Technologies, C508 8-Bit CMOS Microcontroller. Users Manual, May 2001. [32] F. Ionescu, D. Floricau, S. Nitu, Jean-Paul Six, Philippe Delarue, C. Bogus Electronic de putere, Convertoare statice, Editura Tehnic Bucureti, 1998, ISBN 973-31-1262-3. [33] J. G. Kassakian Principles of Power Electronics, Addison-Wesley Publishing Co.,1991. [34] S.T.Karris, Circuit Analzsis II with Matlab Aplications, Orchard Publications, California, ISBN 0-9709511-9-1, USA. [35] Kazimierczuk M.K., Czarkowski D. Resonant Power Converters, John Willy&Sons, Inc. New York, 1995, ISBN 0-471-04706-6. [36] Andrew Knight, Basics of MaTlab and Beyond, Library of Congress, ISBNO-8493-20399, 1999. [37] Ron Lenk Practical design of power supplies, IEEE Press, ISBN 0-7803-3458-2.
177
Modelarea convertoarelor n comutaie_______________________________________________
[38] K.E. Lonngren, S.V.Savov, Fundamental of Electromagnetics with MATLAB, Scitech Publishing, ISBN 1-891121-30-8,2005. [39] . Lungu, O. Pop, S. Plea- Spice Model for Zero Current Switching Quasi-Resonant Buck Convertor, Acta Tehnica Napocensis, vol37, nr.2, Cluj-Napoca, 1998. [40] . Lungu, O. Pop, G. Chindri Educational Platform for Modeling of Zero-Voltage Switching Quasi-Resonant Boost onverters, ISSE 04, Sofia, Bulgaria, 2004. [41] . Lungu, O. Pop Modelarea circuitelor electronice, Editura Casa Crii de tiin ClujNapoca, 2006, ISBN (10) 973-686-975-X; ISBN (13) 978-973-686-975-4. [42] . Lungu , I. Baciu - Comparison Between Different Method to Obtain the Solution for Differential Equation of Half Bridge Inverter , IEEE 2008. [43] . Lungu, O. Pop, G. Chindri Educational Platform for Modeling of Zero-Voltage Switching Quasi-Resonant Boost Converters, 27th International Spring Seminar on Electronics Technology, Sofia, Bulgaria, ISBN 0-7803-8422-9, pp.147-152, 2004 Indexare IEEEXplore INSPEC Accession Number 8487636. [44] D. Maksimovic, Design of the clamped-curent high-power-factor boost rectifier, IEEE Trans. On Induatry Applications, vol.31, no.5, pp 986-991, Sept-Oct 1995. [45] L. Man, O. Pop, A. Tut- Packaging and Thermal Analysis of a Power Inverter for Induction Heating Applications SIITME 2010 IEEE 16th International Symposium for Design and Technology in Electronic PackagingSeptember 23-26,2010 Piteti, Romnia. [46] Lena Max, T. Thiringer, T. Underland, R. Karlsson, Power Electronics Design Laboratory Exercise for Final-Year M.SC. Students, IEEE Transaction On Education, IEEE Education Society, Noiembrie 2009, Volumul 52, Numarul 4, ISSN 0018-9359. [47] . Lungu, A. Tut, O. Pop Educational Platform for study of Operational Amplifiers using Matlab, 33rd International Spring Seminar on Electronics Technology, May 12-16, 2010, Poland, Warsaw. [48] . Lungu, A. Grama, D. Petreu, A. Tut Simulation and design of a Class E power Amplifier, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic [49] . Lungu, D.Petreus, A Matlab Simulator for DC-DC Power Converter, ISSE 2007, 30 th International Spring Seminar on Electronics Technology for Electronics-Emerging Technology for Electronics Packaging, 9-13 May, 2007, Cluj-Napoca, Romania, pp.:559563, ISBN:1-4244-1218-8, IEEE Catalog Number: 07EX1780C. ISBN [50] G. Mndru Teoria circuitelor electrice, Editura U.T. Pres Cluj-Napoca 2004, 973-662-110-3. [51] Muhammad H. Rashid Power electronics circuits, devices, and aplications, second edition, Prentice-Hall 1988, ISBN 0-13-334483-5. [52] M. Murean, . Lungu, O. Pop, Modern education Methods in Extracting Power Factor Preregulators, ISSE 2004, Sofia, Bulgaria, May 2004. [53] James W. Nilsson, Susan A. Riedel Electric circuits, Prentice-Hall 2001, 2000, 1996, ISBN 0-13-032120-6. [54] Noon J.P., UC3855A/B High Performance Power Factor Preregulator, n Power Supply Control Products, Texas Instruments, 2000, pp. 4.1344.153. [55] N. Palaghi Dispozitive semiconductoare de putere, partea I, Editura Mediamira ClujNapoca, 2002, ISBN 973-9358-96-9. [56] N. Palaghi, D. Petreu, C. Frca Electronica de putere, partea a II-a, Editura Mediamira Cluj-Napoca, 2004, ISBN 973-713-039-1.
178
Universitatea Tehnic din Cluj-Napoca_______________________________________________
[57] N. Palaghi, D. Petreu, C. Frca Electronic de comand i reglaj, Editura Mediamira Cluj-Napoca, 2006, ISBN (10) 973-713-109-6; ISBN (13) 978-973-109-6. [58] D. Petreu Electronica surselor de alimentare, Editura Mediamira Cluj-Napoca, 2002, ISBN 973-9358-92-6. [59] D. Petreu, C. Frca, A Comparison between some Different Current Control Methods for Power Factor Corrections Circuits, Proceedings of the 12th DAAAM International Symposium, Jena, Germania, 24-27th October 2001, pp. 363-364, ISBN 3-901509-19-4. [60] D. Petreu, . Lungu Surse n comutaie, ndrumtor de laborator, Editura Mediamira Cluj-Napoca, 1999, ISBN 973-9358-32-2. [61] D. Petreu, G. Muntean, Z. Juhos, N. Palaghi Aplicaii cu microcontrolere din familia 8051, Editura Mediamira Cluj-Napoca, 2005, ISBN 973-713-014-6. [62] D. Petreu, C. Frca, N. Palaghi, F. Mitruly, Biphasic Motor Control with an 8 Bit Microcontroller, The 10th International Symposium for Design and Technology of Electronic Packages, SIITME 2004, Bucureti, Romania, 23-26 September 2004, pp. 162166, ISBN 973-9463-83-5. [63] O. Pop, G. Chindri, A. Grama, F. Hurgoi, ,,Power Factor Correction Circuit with a New Modified SEPIC Converter, Proceedings of ISSE 24 th International Spring Seminar on Electronics Technology, Climneti-Cciulata, Romnia, 5-9 Maz 2001, pp. 117-120, ISBN 0-7803-7111-9, IEEE Xplore DOI 10.1109/ISSE.2001.931026. [64] O. Pop, G. Chindris Matlab Simulation Platform for SEPIC Power Converter in Discontinuous Current Mode Operation, The 11th International Symposium for Design And Technology of Electronic Modules September 22-25, 2005, Cluj-Napoca. [65] O. Pop, S. Lungu Switching Mode Power Converters Modeling with Parasitic Components, 30th International Spring Seminar on Electronics Technology, ISSE 2007, Cluj-Napoca, Romania, ISBN 978-973-713-174-4, IEEEXplore D.O.I. 10.1109/ISSE.2007.4432916. [66] O.Pop, D. Micu, A. Tut, A. Grama, Analysis and simulation of a half bridge inverter for induction heating applications, 4th international Conference on Electromagnetic Fields, Health and Environment, Coimbra-Portugal, 26-28 May 2011. [67] O. Pop, A Tut, A . Grama, S. Lungu, Educational Matlab Tool for PID Regulators Design, 34th International Spring Seminar on Electronics Technology, Slovakia, Mai 1115, abstract proceedings, ISBN 978-80-553-0646-9. [68] O. Pop, A. Tut, Analysis and simulation of power inverter with load variation for induction heating applications, 33rd International Spring Seminar on Electronics Technology, May 12-16, 2010, Poland, Warsaw. [69] O. Pop, A. Tut, Analysis and Simulation of a Half-Bridge Inverter, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic. [70] O. Pop, Influence of power consumption over the input current harmonics pollution for a half-bridge power inverters,ISSE 2008, pp.312, 2008. [71] V. Popescu Electronic de putere,Editura de Vest Timioara,1998,ISBN 973-36-0306-6. [72] V. Popescu, D. Lascu, D. Negoiescu Surse de alimentare n telecomunicaii, Editura de Vest Timioara, 2002, ISBN 973-36-0365-1. [73] M. H. Rasid Power Electronics-Circuits, Devices and application, Prentice Hall, Englewood Cliffs, New Jersey, Second Edition.
179
Modelarea convertoarelor n comutaie_______________________________________________
[74] J. M. Rivas, Y. Han, O. Lietermann, A. Sagneri, D. J. Perreault, A High-Frequencz Resonant Inverter Topology with Low Voltage Stress, IEEE, 1-4244-0655-2/07, 2007 [75] L. Rossetto, G. Spiazzi, P. Tenti, Control Techniques for Power Factor Correction Converters, Proc. of Power Electronics, Motion Control (PEMC), September 1994, pp. 1310-1318. [76] L. F. Shampine, I. Gladwell, S. Thompson - Solving Odes with Matlab, Cambridge University Press, New York, ISBN-13 978-0-511-07707-4 (EBL), 2003. [77] A. Suresh, S. RamaReddy, Parallel Resonance based Current Source Inverter for Induction Heating, European Journal of Scientific Research, ISSN 145-216X, Vol.58 No.2 (2011). [78] R. Sheffer, Fundamentals of Power Electronics with Matlab, ISBN 1-58450-852-3. [79] A. Tut, O. Pop, A . Grama, . Lungu, Educational Matlab tool for simulating of Forward Converters, 34th International Spring Seminar on Electronics Technology, Slovakia, Mai 11-15, 2011. [80] A. Tut, O. Pop, . Lungu, Power Transformers Model used for Inverters Simulation SIITME 2010 IEEE 16th International Symposium for Design and Technology in Electronic Packaging September 23-26,2010 Pitesti, Romania. [81] A. Tut, A. Grama, O. Pop, . Lungu Power Converters Study Regarding the ESR of an Supercapacitor, 15th International Symposium for Design and Technology of Electronics Packages SIITME, 17-20 septembrie 2009, Gyula, Ungaria, Issue 1, Conference Proceedings CD, ISBN: 978-1-4244-50330309. [82] A. Tut, O. POP, Educational Matlab platform for Closed-Loop Simulation of Buck Converters, Novice Insight in Electronics, Communications and Information Technology, Cluj Napoca, Romnia, Issue 6, 2009, pag 69, ISSN 1842-6085. [83] A. Tut, . Lungu, O. Pop, Educational Platform for Closed-loop Simulation of Power Converters, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic. [84] C. K. Tse, M. H. L. Chow, M. K. H. Cheung, A Family of PFC Voltage Regulator Configurations with Reduced Redundant Power Processing, IEEE Transactions on Power Electronics, Vol. 16, No. 6, Nov. 2001, pp. 794-802. [85] Todd P.C., UC3854 Controlled Power Factor Correction Circuit Design n Power Supply Control Products, Texas Instruments, 2000, pp. 4.1144.133. [86] ***, UC3854 High Power Factor Preregulator, n Power Supply Control Products, Texas Instruments, 2000, pp. 4.32 4.41. [87] ***, UC3854A/B Enhanced High Power Factor Preregulator, n Power Supply Control Products, Texas Instruments, 2000, pp. 4.424.47. [88] ***, Modeling, Analysis and Compensation of the Current Mode Converter, n Power Supply Control Products, Texas Instruments, pp. 3.5263.532, 2000. [89] ***, Practical Considerations in Current Mode Power Supplies, n Power Supply Control Products, Texas Instruments, pp. 3.5583.575, 2000. [90] ***, Power Factor Correction Handbook. Choosing the Right Power Factor Controller Solution, ON Semiconductor, 2004. [91] *** Texas Instruments Aplication Notes, Catalog 2002. [92] *** Unitrode Aplication Notes, Catalog 2002. [93] ***L296***DataSheet.
180
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Anexa 2-1
Modelul n complex a transformatorului
Schema echivalent a unui transformator electric este prezentat n figura 2.2, iar n cele ce urmeaz se prezint un model matematic al transformatorului exprimat n complex.
Figura A-1.1
Considernd c Z1=R1+jX1 este impedana circuitului primar, iar Z2=R2+jX2 este impedana circuitului secundar i ZS este impedana de sarcin cuplat la circuitul secundar, putem scrie impedana de cuplaj magnetic dintre primar i secundar ca fiind Zm=jXm=jL12. Ecuaiile de tensiune ale circuitului pot fi scrise sub urmtoarea form, innd cont c tensiunea de alimentare la bornele primarului 1-1 este U1, iar la bornele secundarului 2-2 este U2. U 1 = Z 1 I 1 + Z m I 2 0 = Z m I 1 + ( Z 2 + Z S ) I 2 Dac adugm i scdem n prima ecuaie termenul (jXmI1) iar n a doua termenul (jXmI1), sistemul devine: U 1 = R1 I 1 + j ( X 1 X m ) I 1 + jX m ( I 1 + I 2 ) 0 = jX m ( I 1 + I 2 ) + R2 I 2 + j ( X 2 X m ) I 2 + Z S I 2 Acestor ecuaii le corespunde o schem echivalent fr cuplaj magnetic prezentat n figura A-.1.2. Scriind ecuaiile de funcionare pentru cele dou ochiuri de circuit ale schemei echivalente, acestea sunt identice cu ecuaiile descrise de circuitul din figura 2.3.
Figura A-.1.2 Schema echivalent a unui transformator fr cuplaj magnetic
I2 =
2 Z m Zm I1 U1 = Z1 Z2 + ZS Z2 + ZS
I1
181
Modelarea convertoarelor n comutaie_______________________________________________
Astfel putem scrie impedana echivalent a ntregului circuit n raport cu bornele de intrare 1-1 Ze11 ca fiind: Z e11' = U1 Zm Xm X = Z1 = Z1 + = Z1 + m I1 Z2 + ZS Z2 + ZS Z 2t
2 2 2
Unde: Z2t este impedana total a circuitului secundar: Z 2t = Z 2 + Z S = ( R2 + RS ) + j ( X 2 + X S ) = R2t + jX 2t Impedana secundarului reflectat n primar poate fi exprimat cu relaia: Z2 =
' 2 2 Zm Xm * * 2 2 ' ' = 2 Z 2t = 12 Z 2t = 12 ( R2t jX 2t ) = R2 + jX 2 Z 2 + Z S Z 2t
Unde 212 reprezint coefientul de reflexie al impedanei secundare n primar:
2 12 = 2 Xm X2 = 2 m 2 2 Z 2t R2t + X 2t
Mrimea R2 este rezistena secundarului reflectat n primar:
' 2 2 R2 = 12 R2t = 12 ( R2 + RS ) 0
Mrimea X2 este reactana secundarului reflectat n primar:
' 2 X 2 = 12 ( X 2 + X S )
Astfel conform relaiei enunate anterior impedana echivalent la bornele 1-1 se poate scrie sub forma: Z e11' = Z 1 +
2 Xm ' 2 2 = Z 1 + Z 2 = [ R1 + 12 ( R2 + RS )] + j[ X 1 12 ( X 2 + X S )] = Re + jX e Z 2t
Iar rezistena i reactana echivalent vor avea valorile:
2 Re11' = R1 + 12 ( R2 + RS ) 2 X e11' = X 1 12 ( X 2 + X S )
Fluxul magnetic creat de fiecare bobin poate fi descompus n dou componente: o component util u care strbate cealalt bobin i o component pe care o vom denumi flux de dispersie sau de scpri, S, care nu strbate cealalt bobin. Notnd cu 1 i 2 fluxurile proprii create de cele dou bobine se poate scrie: 1 = u1 + s1 2 = u 2 + s 2
182
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Fluxul magnetic creat de fiecare bobin poate fi descompus n dou componente: o component util u care strbate cealalt bobin i o component pe care o vom denumi flux de dispersie sau de scpri, S, care nu strbate cealalt bobin. Notnd cu 1 i 2 fluxurile proprii create de cele dou bobine se poate scrie: 1 = u1 + s1 2 = u 2 + s 2 de unde rezult:
u1 = (1 12 )1 u 2 = (1 21 )2
Avnd n vedere definiia coeficientului de cuplaj: k= M = M max
M = k12 k21 = 12 21 1 2 L1 L2
unde Mmax este valoarea maxim posibil a inductivitii mutuale. Sensul fizic al coeficientului de cuplaj este acela c acesta include n structura sa att cuplajul dinspre primar spre secundar (k12) ct i cel invers dinspre secundar spre primar (k21). Putem rescrie ecuaia coeficientului de cuplaj ca fiind: k=
u1 u 2 = (1 12 ) (1 21 ) 1 2
183
Modelarea convertoarelor n comutaie_______________________________________________
Anexa 2-2
Platform Matlab de simulare a redresoarelor
Platforma Matlab de simulare a redresoarelor monofazate este structurat n 6 fiiere. Fiierul de iniializare, apel_transf_c:
clear all; close all; clc; % Secundar cu redresor si filtru C %-------------% Primar L1=2; R1=155; % ------------% Secundar L2=12e-3; R2=1.55; %--------------E=220; f=50; k=0.98; % coeficientul de cuplaj %----------------------------------%nn=Raportul nr de spire %ns=sqrt(L1./L2); %ns=N1./N2=sqrt(L1./L2) M=k.*sqrt(L1.*L2); %----------% Sarcina redresor Rd=0.5; R=100; C=220e-6; %-----------N=3; p=1; tip=1; % 1 -faza s=1; %---------------------------------------
Fiierul de interfaare grafic cu utilizatorul i fiierul de conine algoritmul platformei Matlab.
function interfata1(E,f,k,L1,R1,L2,R2,Rd,R,C,N,p,tip,s) %--------------------------------------------fig=figure('name','Redresor',... 'units','normalized',... 'position',[0.07 0.07 0.8 0.8],... 'color',[0.75 0.75 0.75],... 'numbertitle','off'); %---Date de intrare---% intrare=uipanel('BackgroundColor',[0 .75,0.75,0.75],... 'ForegroundColor','black',... 'Title','Date de intrare',...
184
Universitatea Tehnic din Cluj-Napoca_______________________________________________
'FontSize',11,... 'TitlePosition','centertop',... 'Position',[0.05 0.72 0.2 0.25]); BModt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.68 0.4 0.2],... 'BackgroundColor',[0.75,0.75,0.75],. .. 'ForegroundColor','black',... 'String', 'Tipul',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',intrare); redres=uicontrol('Style','popup',... 'Units','normalized',... 'Position',[0.5 0.7 0.4 0.2],... 'String',' Faza | aFaza ',... 'value',tip,... 'Parent',intrare,... 'Callback','tip=get(gco,''value'');c lose;interfata1(E,f,k,L1,R1,L2,R2,Rd ,R,C,N,p,tip,s)'); xc='str2num(get(gco,''String''));clo se;interfata1(E,f,k,L1,R1,L2,R2,Rd,R ,C,N,p,tip,s)'; BEt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.47 0.4 0.2],... 'BackgroundColor',[0.75,0.75,0.75],. .. 'ForegroundColor','black',... 'String', 'E [V]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',intrare); BEe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.5 0.4 0.2],... 'String', E,... 'Callback',['E=',xc],... 'Parent',intrare); Bft=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.24 0.4 0.2],... 'BackgroundColor',[0.75,0.75,0.75] 'ForegroundColor','black',... 'String', 'f [Hz]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',intrare); Bfe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.27 0.4 0.2],... 'String', f,... 'Callback',['f=',xc],... 'Parent',intrare); BNt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.01 0.4 0.2],... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'String', 'N ',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'parent',intrare); BNe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.04 0.4 0.2],... 'String', N,... 'Tag','tempN',... 'Callback',['N=',xc],... 'parent',intrare); %---Transformator ---% iesire=uipanel('BackgroundColor',[0. 75,0.75,0.75],...'white' 'ForegroundColor','black',... 'Title','Transformator',... 'FontSize',11,... 'TitlePosition','centertop',... 'Position',[0.05 0.35 0.2 0.36]); BLpt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.73 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'String', 'Lp [H]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); BLpe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.76 0.4 0.15],... 'String', L1,... 'Callback',['L1=',xc],... 'Parent',iesire); BRpt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.55 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'String', 'Rp [Ohm]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); BRpe=uicontrol('Style','edit',... 'Units','normalized',...
185
Modelarea convertoarelor n comutaie_______________________________________________
'Position',[0.5 0.58 0.4 0.15],... 'String', R1 ,... 'Callback',['R1=',xc],... 'Parent',iesire); BLst=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.37 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'String', 'Ls [H]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); BLse=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.4 0.4 0.15],... 'String', L2,... 'Callback',['L2=',xc],... 'Parent',iesire); BRst=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.19 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'String', 'Rs [Ohm] ',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); BRse=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.22 0.4 0.15],... 'String', R2,... 'Callback',['R2=',xc],... 'Parent',iesire); Bkt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.01 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'String', 'k ',... 'Fontsize', 11,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); Bke=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.04 0.4 0.15],... 'String', k,... 'Callback',['k=',xc],... 'Parent',iesire); %--- Parametri circuit ---% calc=uipanel('BackgroundColor',[0.75 ,0.75,0.75],...'white' 'ForegroundColor','black',... 'Title','Parametri circuit',... 'FontSize',11,... 'TitlePosition','centertop',... 'Position',[0.05 0.09 0.2 0.25]); BRdt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.7 0.4 0.2],... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'String', 'Rd [Ohm] ',... 'Fontsize', 9,... FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',calc); BRde=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.73 0.4 0.2],... 'String', Rd,... 'Callback',['Rd=',xc],... 'Parent',calc); BUdt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.47 0.4 0.2],... 'BackgroundColor',[0.75,0.75,0.75],. ForegroundColor','black',... 'String', 'Ud [V] ',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',calc); tensdiod=uicontrol('Style','popup',. Units','normalized',... 'Position',[0.5 0.49 0.4 0.2],... 'String',' 0.7 | 0.6 ',... 'value',s,... 'Parent',calc,... 'Callback','s=get(gco,''value'');clo se;interfata1(E,f,k,L1,R1,L2,R2,Rd,R ,C,N,p,tip,s)'); BRst=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.24 0.4 0.2],... 'BackgroundColor',[0.75,0.75,0.75] 'ForegroundColor','black',... 'String', 'Rs [Ohm]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',calc); BRse=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.27 0.4 0.2],... 'String', R,... 'Callback',['R=',xc],... 'Parent',calc); BCt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.01 0.4 0.2],...
186
Universitatea Tehnic din Cluj-Napoca_______________________________________________
options=odeset('Events',@Tr_eve_R); % detecteaza i2=0 [t,y,te,ye,ie]=ode45(@ec_transf_R,[t 0,tf],[ci],[options],L1,R1,L2,R2,M,E ,f,Rd,R,C,ud); te1=te; nt=length(t); e=E.*sin(w.*t); u21=M.*(e-R1.*y(:,1))./L1; Det=L1.*L2-M.^2; d1=(L2.*(e-R1.*y(:,1))M.*((R2+Rd).*y(:,2)+y(:,3)))./Det; % i1 d2=(L1.*((R2+Rd).*y(:,2)+y(:,3))+M.*(eR1.*y(:,1)))./Det; % i2 u211=M.*d1-R2.*y(:,2)-L2.*d2; %-----------------------subplot('position',[0.32 0.72 0.6 0.25])%(2,1,1); plot(t,y(:,1),'b',t,y(:,2),'r');grid on; subplot('position',[0.32 0.4 0.6 0.25]) plot(t,e,'b',t,u21,'k');grid on; subplot('position',[0.32 0.07 0.6 0.25])%(2,1,2); plot(t,y(:,3),'b');grid on; %---------------------if (p==0)&&(m<=N-N1) subplot('position',[0.32 0.72 0.6 0.25]); hold off;%(2,1,1); hold off; subplot('position',[0.32 0.4 0.6 0.25]); hold off; subplot('position',[0.32 0.05 0.6 0.25]); hold off;%(2,1,2); hold off; else subplot('position',[0.32 0.72 0.6 0.25]); hold on;%(2,1,1); hold on; subplot('position',[0.32 0.4 0.6 0.25]); hold on; subplot('position',[0.32 0.07 0.6 0.25]); hold on;%(2,1,2); hold on; end %--------------------------intervalul 2 i2=0 t0=t(nt); tf=t0+T; ci=y(nt,:); options=odeset('Events',@Tr_eve_R1); % detecteaza uD>=0 [t,y,te,ye,ie]=ode45(@ec_transf_R1,[ t0,tf],[ci],[options],L1,R1,L2,R2,M, E,f,Rd1,R,C,ud); te2=te; nt=length(t); e=E.*sin(w.*t);
'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'String', 'C [F]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',calc); BCe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.04 0.4 0.2],... 'String', C,... 'Callback',['C=',xc],... 'Parent',calc); % =======Reprezentari Grafice =========== % BR1=uicontrol('Style','push',... 'Units','normalized',... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'Position',[0.05 0.02 0.08 0.05],... 'String','Permanent',... 'Callback','p=0;close,interfata1(E,f ,k,L1,R1,L2,R2,Rd,R,C,N,p,tip,s)'); BR2=uicontrol('Style','push',... 'Units','normalized',... 'BackgroundColor',[0.75,0.75,0.75],. 'ForegroundColor','black',... 'Position',[0.17 0.02 0.08 0.05],... 'String','Tranzitoriu',... 'Callback','p=1;close;interfata1(E,f ,k,L1,R1,L2,R2,Rd,R,C,N,p,tip,s)'); %=================================== ========================= if s==1 ud=0.7; elseif s==2 ud=0.6; end M=k.*sqrt(L1.*L2); w=2.*pi.*f; T=1./f; t=0; nt=length(t); y=[0 0 0]; N1=3; Rd1=10e2; switch tip case 1 for m=1:N %--------------------------intervalul 1 i2>0 t0=t(nt); tf=t0+T; ci=y(nt,:);
187
Modelarea convertoarelor n comutaie_______________________________________________
u21=M.*(e-R1.*y(:,1))./L1; Det=L1.*L2-M.^2; d1=(L2.*(e-R1.*y(:,1))M.*((R2+Rd1).*y(:,2)+y(:,3)+ud))./De t; % i1 d2=(L1.*((R2+Rd1).*y(:,2)+y(:,3)+ud)+M.* (e-R1.*y(:,1)))./Det; % i2 u211=M.*d1-R2.*y(:,2)-L2.*d2; %-----------------------subplot('position',[0.32 0.72 0.6 0.25])%(2,1,1); plot(t,y(:,1),'m',t,y(:,2),'k');grid on; subplot('position',[0.32 0.4 0.6 0.25]); plot(t,e,'b',t,u21,'k');grid on; subplot('position',[0.32 0.07 0.6 0.25])%(2,1,2); plot(t,y(:,3),'g');grid on; %---------------------if (p==0)&&(m<=N-N1) subplot('position',[0.32 0.72 0.6 0.25]); hold off; subplot('position',[0.32 0.4 0.6 0.25]); hold off; subplot('position',[0.32 0.05 0.6 0.25]); hold off; else subplot('position',[0.32 0.72 0.6 0.25]); hold on; subplot('position',[0.32 0.4 0.6 0.25]); hold on; subplot('position',[0.32 0.07 0.6 0.25]); hold on; end %=================================== ================================= end case 2 for m=1:N %--------------------------intervalul 1 i2>0 t0=t(nt); tf=t0+1.2*T; ci=y(nt,:); options=odeset('Events',@Tr_eve_Ra); % detecteaza u21 > uC [t,y,te,ye,ie]=ode45(@ec_transf_R0,[ t0,tf],[ci],[options],L1,R1,L2,R2,M, E,f,Rd,R,C,ud); te1=te; nt=length(t); w=2.*pi.*f; e=E.*sin(w.*t); u21=-M.*(e-R1.*y(:,1))./L1; %-----------------------subplot('position',[0.32 0.72 0.6 0.25]);%(3,1,1); plot(t,y(:,1),'b',t,y(:,2),'r'); subplot('position',[0.32 0.4 0.6 0.25]);%(3,1,1); plot(t,e,'b',t,u21,'r'); subplot('position',[0.32 0.07 0.6 0.25]);%(3,1,3); plot(t,y(:,3),'r'); %---------------------if (p==0)&(m<=N-N1) subplot('position',[0.32 0.72 0.6 0.25]); hold off;%;(3,1,1); hold subplot('position',[0.32 0.4 0.6 0.25]); hold off;%(3,1,1); subplot('position',[0.32 0.07 0.6 0.25]); hold off;%;(3,1,3); hold else subplot('position',[0.32 0.72 0.6 0.25]); hold on;%;(3,1,1); hold on; subplot('position',[0.32 0.4 0.6 0.25]); hold on; subplot('position',[0.32 0.07 0.6 0.25]); hold on;%;(3,1,3); hold on; end %--------------------------intervalul 2 i2=0 t0=t(nt); tf=t0+T; ci=y(nt,:); options=odeset('Events',@Tr_eve_Ra1) ; % detecteaza i2 < 0 [t,y,te,ye,ie]=ode45(@ec_transf_Ra,[ t0,tf],[ci],[options],L1,R1,L2,R2,M, E,f,Rd,R,C,ud); te2=te; nt=length(t); e=E.*sin(w.*t); u21=-M.*(e-R1.*y(:,1))./L1; %-----------------------subplot('position',[0.32 0.72 0.6 0.25]);%(3,1,1); plot(t,y(:,1),'m',t,y(:,2),'k'); subplot('position',[0.32 0.4 0.6 0.25]);%(3,1,1); plot(t,e,'b',t,u21,'r'); subplot('position',[0.32 0.07 0.6 0.25]);%(3,1,3); plot(t,y(:,3),'g'); %---------------------if (p==0)&(m<=N-N1) subplot('position',[0.32 0.72 0.6 0.25]); hold off;%(3,1,1); hold off; subplot('position',[0.32 0.4 0.6 0.25]); hold off;%(3,1,1);
188
Universitatea Tehnic din Cluj-Napoca_______________________________________________
function [dy]=ec_transf_R(t,y,L1,R1,L2,R2,M,E ,f,Rd,R,C,ud) dy=zeros(3,1); w=2.*pi.*f; e=E.*sin(w.*t); %----------------------Det=L1.*L2-M.^2; %-------------------------% e si u2 in faza dy(1)=(L2.*(e-R1.*y(1))M.*((R2+Rd).*y(2)+y(3)))./Det; % i1 dy(2)=(L1.*((R2+Rd).*y(2)+y(3))+M.*(eR1.*y(1)))./Det; % i2 dy(3)=(y(2)-y(3)./R)./C; % uc=u %----------------------------------function dy=ec_transf_R1(t,y,L1,R1,L2,R2,M,E, f,Rd1,R,C,ud) dy=zeros(3,1); w=2.*pi.*f; e=E.*sin(w.*t); Det=L1*L2-M^2; %----------------------% i1 si i2 in faza %------------------% dy(1)=(e-R1.*y(1))./L1; % i1 % dy(2)=0; % i2 % dy(3)=-y(3)./(R.*C); % uc=u dy(1)=(e-R1.*y(1))./L1; % i1 dy(2)=(L1.*((R2+Rd1).*y(2)+ud+y(3))+M.*(eR1.*y(1)))./Det; % i2 dy(3)=(y(2)-y(3)./R)./C; %----------------------------------function [value,isterminal,direction] = Tr_eve_R1(t,y,L1,R1,L2,R2,M,E,f,Rd,R ,C,ud) w=2.*pi.*f; e=E.*sin(w.*t); u21=M.*(e-R1.*y(1))./L1; value =u21-y(3)-ud; % detect uD =0.7 isterminal = 1; % stop the integration direction =1; % negative direction %-----------------------------------
subplot('position',[0.32 0.07 0.6 0.25]); hold off;%(3,1,3); hold off; else subplot('position',[0.32 0.72 0.6 0.25]); hold on;%(3,1,1); hold on; subplot('position',[0.32 0.4 0.6 0.25]); hold on;%(3,1,1); subplot('position',[0.32 0.07 0.6 0.25]); hold on;%(3,1,3); hold on; end %----------------------------------------end end %-----------------------------z1=max(y(:,3)); z2=min(y(:,3)); z3=z1-z2; if tip==1 teta2=te1; teta1=te2-T; tetaC=teta2-teta1; cond=(tetaC*2*180)/T; elseif tip==2 teta1=te1; teta2=te2; tetaC=teta2-teta1; cond=(tetaC*2*180)/T; end subplot('position',[0.32 0.72 0.6 0.25]); grid on;%(3,1,1);grid on; ylabel(['i1,i2 [ A ] ']); subplot('position',[0.32 0.4 0.6 0.25]); grid on;%(3,1,3);grid on; ylabel(['e, u2 [ V ] ']); subplot('position',[0.32 0.07 0.6 0.25]); grid on;%(3,1,3);grid on; ylabel(['uC [ V ] ']); xlabel([' t [s]' , ' DuC = ',num2str(z3),' [ V ]' , ' \thetac^\o = ',num2str(cond)]); %=================================== =================== Functii function [value,isterminal,direction] = Tr_eve_R(t,y,L1,R1,L2,R2,M,E,f,Rd,R, C,ud) value = y(2); % detect i2 = 0 isterminal = 1; % stop the integration direction = -1; % negative direction %-----------------------------------
189
Modelarea convertoarelor n comutaie_______________________________________________
function dy=ec_transf_R0(t,y,L1,R1,L2,R2,M,E, f,Rd,R,C,ud) dy=zeros(3,1); w=2.*pi.*f; e=E.*sin(w.*t); %----------------------% i1 si i2 in faza %------------------dy(1)=(e-R1.*y(1))./L1; % i1 dy(2)=0; % i2 dy(3)=-y(3)./(R.*C); % uc=u %----------------------------------function [value,isterminal,direction] = Tr_eve_Ra(t,y,L1,R1,L2,R2,M,E,f,Rd,R ,C,ud) w=2.*pi.*f; e=E.*sin(w.*t); u21=-M.*(e-R1.*y(1))./L1; value =u21-y(3)-ud; % detect uD =0.7 isterminal = 1; % stop the integration direction =1; % negative direction %=================================== ============= function [dy]=ec_transf_Ra(t,y,L1,R1,L2,R2,M, E,f,Rd,R,C,ud) dy=zeros(3,1); w=2.*pi.*f; e=E.*sin(w.*t); %----------------------Det=L1.*L2-M.^2; %-------------------------% i1 si i2 in antifaza dy(1)=(L2.*(eR1.*y(1))+M.*((R2+Rd).*y(2)+y(3)))./ Det; % i1 dy(2)=(L1.*((R2+Rd).*y(2)+y(3))+M.*(eR1.*y(1)))./Det; % i2 dy(3)=(y(2)-y(3)./R)./C; % uc=u %----------------------------------function [value,isterminal,direction] = Tr_eve_Ra1(t,y,L1,R1,L2,R2,M,E,f,Rd, R,C,ud); w=2.*pi.*f; e=E.*sin(w.*t); %u21=M.*(e-R1.*y(1))./L1; %value =u21-y(3); % detect uD = 0 %u2=Rd.*y(2)+y(3)+0.6; value =y(2); % detect i2 = 0 isterminal = 1; % stop the integration direction =-1; % negative direction %=================================== =============
Fiierul de reprezentare a caracteristicelor redresoarelor
function car_red (C,R,f) fig=figure('name','Caracteristica',... 'units','normalized',... 'position',[0.07 0.07 0.8 0.8],... 'color',[0.75 0.75 0.75],... 'numbertitle','off'); x=logspace(-1,2,100); % x=w.*R.*C; nx=length(x); for k=1:nx te2(k)=pi-atan(x(k)); % rad te1(k)=fzero(@interval1,[0],[optimset],x(k)); te1d(k)=fzero(@interval2,[0],[optimset],x(k)); end te2g=180.*te2./pi; te1g=180.*te1./pi; te1dg=180.*te1d./pi;
% mono % dubla
190
Universitatea Tehnic din Cluj-Napoca_______________________________________________
%--------------------------------------------subplot(3,1,1); semilogx(x,te2g,'r',x,te1g,'b',x,te1dg,'g');grid on;hold on; ylabel(['te2 te1 [ grade ]']); %----------------------------------------y=sqrt(1+x.^2); %-----------------subplot(3,1,2); semilogx(x,y,'r');grid on; ylabel(['I./E./R ']); w=2*pi*f; x=w*R*C; te2=pi-atan(x); % rad te1=fzero(@interval1,[0],[optimset],x); % mono te1d=fzero(@interval2,[0],[optimset],x); % dubla % unghiul de conductie tecm=180.*(te2-te1)./pi tecd=180.*(te2-te1d)./pi ss=logspace(-1,2,100); te2=pi-atan(ss); % rad te1=fzero(@interval11,[0],[optimset],x); % mono zz=(2*pi-(sin(te2)-sin(te1)))/x; subplot(313) semilogx(ss,zz,'b',[x,x],[min(zz),min(zz)],'or'); grid on; ylabel(['DU/E']); xlabel(['x = w.*R.*C']); xlabel([' x = w.*R.*C' , ' x = ',num2str(x)]); subplot(311) xlabel([ ' \thetac^\o = ',num2str(tecm)]); function [y]=interval11(te1,x); te2=pi-atan(x); y=sin(te2)*exp((te2-te1-2*pi)/x)-sin(te1);
Fiiere care calculeaz variaia unghiurilor theta:
function y=interval1(te1,x); te2=pi-atan(x); y=sin(te2)*exp((te2-te1-2*pi)/x)-sin(te1);
function y=interval2(te1,x); te2=pi-atan(x); y=sin(te2)*exp((te2-te1-pi)/x)-sin(te1);
191
Modelarea convertoarelor n comutaie_______________________________________________
Anexa 3-1
Platforma Matlab de simulare a convertorului Buck n bucl nchis
Platforma matlab implementat pentru simularea convertorului Buck n bucl nchis are la baz dou fiiere. Fiierul start, fiier n care se iniializeaz valorile convertorului i fiierul ed_buck, fiier n care este descris algoritmul de funcionare i interfaa grafic a platformei cu utilizatorul. Fiierul start
clear all ; close all; %=========================== % initializarea valorilor --E=40; L=0.00013; C=10e-6; R=10; Uref=18; Freq=2e+4; N=90; p=1; %------------Apelarea algoritmului ed_buck(E,L,C,R,Freq,Uref,N,p);
Fiierul ed_buck
function ed_buck(E,L,C,R,Freq,Uref,N,p); %================================== %------Interfata Grafica----------Fig=figure('Name', 'Circuitul Buck',... 'Units', 'normalized',... 'Position',[0.05 0.05 0.95 0.85],... 'Color',[0.5 0.6 0.7],... 'NumberTitle','off'); txt=[' E[V] L[H] C[F] R[ohm] Freq[Hz] Uref[V] N ']; for k=1:7 B_T(k)=uicontrol('Style','text', ... 'Units','normalized', ... 'backgroundcolor',[1, 1, 1],... 'Position',[0.91 0.85-0.1.*(k-1) 0.10 0.04], ... 'String',txt((8.*(k-1))+1:8.*k), ... 'Callback','close; '); end %-----------------------uimenu('label','Documentation','accelerator','D','callback',''); xc= 'str2num(get(gco,''String''));close;ed_buck(E,L,C,R,Freq,Uref,N,p)';
192
Universitatea Tehnic din Cluj-Napoca_______________________________________________
uicontrol('Style','edit',... 'Units','normalized',... 'backgroundcolor',[1, 1, 0],... 'Position',[0.91 0.80 0.10 0.04],... 'String',E,... 'Callback',['E=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'backgroundcolor',[1, 1, 0],... 'Position',[0.91 0.70 0.10 0.04],... 'String',L,... 'Callback',['L=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'backgroundcolor',[1, 1, 0],... 'Position',[0.91 0.60 0.10 0.04],... 'String',C,... 'Callback',['C=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'backgroundcolor',[1, 1, 0],... 'Position',[0.91 0.5 0.10 0.04],... 'String',R,... 'Callback',['R=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'backgroundcolor',[1, 1, 0],... 'Position',[0.91 0.4 0.10 0.04],... 'String',Freq,... 'Callback',['Freq=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'backgroundcolor',[1, 1, 0],... 'Position',[0.91 0.3 0.10 0.04],... 'String',Uref,... 'Callback',['Uref=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'backgroundcolor',[1, 1, 0],... 'Position',[0.91 0.2 0.10 0.04],... 'String',N,... 'Callback',['N=',xc]); %==================================== Bq=uicontrol('Style','pushbutton',... 'Units','normalized',... 'Position',[0.01 0.97 0.1 0.04],... 'String','Regim Permanent',... 'backgroundcolor',[0, 1, 1],... 'Callback','p=0;close;ed_buck(E,L,C,R,Freq,Uref,N,p)'); if p==0 set(Bq,'String','Regim Tranzitoriu'); set(Bq,'Callback','p=1,close;ed_buck(E,L,C,R,Freq,Uref,N,p)'); end %============================================================= if Uref > E uicontrol('Style','text',...
193
Modelarea convertoarelor n comutaie_______________________________________________
'Units','normalized',... 'backgroundcolor',[1, 1, 0],... 'Position',[0.4 0.95 0.20 0.04],... 'String','ATENTIE Valoare Uref trebuie sa fie mai mica decat E (Uref=10) Modificati Uref in intervalul [1 E)',... 'Callback','close;ed_buck(E,L,C,R,Freq,Uref,N,p)'); Uref=10; end %============================================= %----------------Algoritm de functionare-----t=0; y=[0 0]; T=1/Freq; D=0.4; R111=R; for k=1:N if (k==N/3) R=R111/2; elseif (k==2*N/3) R=R111*2; end nt=length(t); t0=(k-1).*T; tf=t0+D.*T; ci=y(nt,:); interval=1; [t,y]=ode45(@ec_conv,[t0,tf],[ci],[],E,R,L,C,interval); nt=length(t); %----------------------subplot('Position',[0.10 0.55 0.80 0.35]); plot(t,y(:,1),'r');grid on;hold on; subplot('Position',[0.10 0.15 0.80 0.35]); plot(t,y(:,2),'r');grid on;hold on; %---------------------interval=2; t0=(k-1).*T+D.*T; tf=k.*T; ci=y(nt,:); interval=2; options=odeset('Events',@conv_ev); [t,y,te,ye,ie]=ode45(@ec_conv,[t0,tf],[ci],[options],E,R,L,C,interval); nt=length(t); subplot('Position',[0.10 0.55 0.80 0.35]); plot(t,y(:,1),'b');grid on;hold on; subplot('Position',[0.10 0.15 0.80 0.35]); plot(t,y(:,2),'b');grid on;hold on; %----------------------------interval=3; if te>0; t0=t(nt); tf=k.*T; ci=y(nt,:); interval=3; [t,y]=ode45(@ec_conv,[t0,tf],[ci],[],E,R,L,C,interval); %----------------------subplot('Position',[0.10 0.55 0.80 0.35]); plot(t,y(:,1),'g');grid on;hold on; subplot('Position',[0.10 0.15 0.80 0.35]); plot(t,y(:,2),'g');grid on;hold on;
194
Universitatea Tehnic din Cluj-Napoca_______________________________________________
end %--------------Regim de vizualizare---------------if (p==0) & (j<N-1) subplot('Position',[0.10 0.55 0.80 0.35]); hold off; end if (p==0)&(j<N-2) subplot('Position',[0.10 0.15 0.80 0.35]); hold off; end if 2.*L./(R.*T)>=1-D Us=E.*D; %regim neintrerupt else z=0.5.*R.*D.^2.*T./L; v=0.5.*(sqrt(z.^2+4.*z)-z); Us=v.*E; %regim intrerupt end D=D+(Uref/E-Us/E); % modificare D if D > 1 % limitare D D=0.98; elseif D < 0 D=0.02; end subplot('Position',[0.10 0.15 0.80 0.35]); plot(t,D*10,'m');grid on;hold on; end %======================================== subplot('Position',[0.10 0.55 0.80 0.35]); ylabel(['iL [ A ]']); title(['Circuit Buck',' Us = ',num2str(Us),' [ V ]',' D = ',num2str(D),' T = ',num2str(T) ,' [ s]']); subplot('Position',[0.10 0.15 0.80 0.35]); ylabel(['Us [ V ]']); title([' Pentru 0->N/3 perioade R = ',num2str(R111) , ' Pentru N/3>2N/3 perioade R = ',num2str(R111/2) , ' Pentru 2N/3->N perioade R = ',num2str(R111*2) ,' ']); function dy=ec_conv(t,y,E,R,L,C,interval); % Ecuatii diferentiale dy=zeros(2,1); if interval==1 a=1;b=1;c=1; elseif interval==2 a=0;b=1;c=1; else a=0;b=0;c=0; end dy(1)=(a.*E-b.*y(2))./L; % Curent dy(2)=(c.*y(1)-y(2)./R)./C; % Tensiune %============================================================= function [value,isterminal,direction] =conv_ev(t,y,E,R,L,C,interval); % detectare i=0 value = y(1); % detect iL = 0 isterminal = 1; % stop the integration direction = -1; % negative direction
195
Modelarea convertoarelor n comutaie_______________________________________________
Anexa 3-2
Algoritmul de control scris pe microcontrollerul C508 n vederea realizrii practice a convertorului Buck n bucl nchis
Microcontrolerul C508 face parte din familia C500 de la productorul Infineon, si este compatibil cu standardul 8051. Pstrnd caracteristicile arhitecturale si operaionale ale microcontrolerului C501, C508 ncorporeaz un procesor cu opt pointeri de date, un convertor analog-digital pe 10 bii, unitate de captare i comparare, timerul 2 cu funcii de captare/comparare, structura de ntreruperi mbuntit cu patru nivele de prioritate. Caracteristicile sale includ deasemenea msuri extinse de economisire a energiei, 256x8 memorie RAM, 32Kx8 memorie program integrata pe chip, mbuntiri legate de RFI, periferice ca Capture Compare Unit, utile pentru controlul aplicaiilor cu motoare, bucla PLL intern, iar cu o frecven maxim a procesorului de 20 MHz se realizeaz un ciclu maina la 300 ns. C508 este eficient ca controler dar i ca processor aritmetic. Are faciliti extinse pentru calcule binar si BCD si exceleaz n capabilittile de manipulare a biilor. Cu un cristal extern de 10 MHz 58% din instruciuni sunt executate ntr-un ciclu main.
Fig. A3.2.1 Blocurile funcionale ale microcontrollerului C508
196
Universitatea Tehnic din Cluj-Napoca_______________________________________________
// @Filename MAIN.C // @Project buck_2.dav #include "MAIN.H" uword ADC_VAL = 0; void MAIN_vInit(void) { SYSCON = 0x20; /// Initialization 'Analog/Digital Converter' ADC_vInit(); /// Initialization 'Capture/Compare Unit (CCU)' CCU_vInit(); /// Initialization 'Serial Interface (USART)' USART_vInit(); EA = 1; } // End of function MAIN_vInit void main(void) { MAIN_vInit(); //opreste compare timer 1 CCU_vStopTmr(CCU_TIMER_1); ADC_vStart(CHANNEL_0, // A/D in conversie continua, canal 0 ADC_MODE_CONT) ; ADC_VAL = ADC_ubRead8Bit(); CCU_vSetCCxReg(CCU_0,(ADC_VAL*(0xE 1)/(0xFF))); CCU_vTransferShadow(CCU_TIMER_1); CCU_vStartTmr(CCU_TIMER_1); while(1){}; } // End of function main #ifndef _MAIN_H_ #define _MAIN_H_ #define bool bit #define ulong unsigned long #define uword unsigned int #define ubyte unsigned char #define KEIL sfr ACC = 0xE0; sfr ADCON0 = 0xD8; sfr ADCON1 = 0xDC; sfr ADDATH = 0xD9; sfr ADDATL = 0xDA; sfr B = 0xF0; sfr BCON = 0xD7; sfr CCEN = 0xC1; sfr CCH0 = 0xF3; sfr CCH1 = 0xF5; sfr CCH2 = 0xF7; sfr CCIE = 0xD6; sfr CCIR = 0xE5; sfr CCL0 = 0xF2; sfr CCL1 = 0xF4; sfr CCL2 = 0xF6; sfr CCPH = 0xDF; sfr CCPL = 0xDE; sfr CMP2H = 0xD5; sfr CMP2L = 0xD4; sfr CMSEL0 = 0xE3; sfr CMSEL1 = 0xE4; sfr COINI = 0xE2; sfr COTRAP = 0xF9; sfr CP2H = 0xD3; sfr CP2L = 0xD2; sfr CRCH = 0xCB; sfr CRCL = 0xCA; sfr CT1CON = 0xE1; sfr CT1OFH = 0xE7; sfr CT1OFL = 0xE6; sfr CT2CON = 0xF1; sfr DPH = 0x83; sfr DPL = 0x82; sfr DPSEL = 0x92; sfr EINT = 0xFB; sfr IEN0 = 0xA8; sfr IEN1 = 0xB8; sfr IEN2 = 0x9A; sfr IEN3 = 0xBE; sfr IP0 = 0xA9; sfr IP1 = 0xB9; sfr IRCON = 0xC0; sfr P0 = 0x80; sfr P1 = 0x90; sfr P2 = 0xA0; sfr P3 = 0xB0; sfr P4 = 0xDB; sfr P5 = 0xF8; sfr PCON = 0x87; // located in the mapped SFR area sfr PCON1 = 0x88; sfr PSW = 0xD0; sfr SBUF = 0x99; sfr SCON = 0x98; sfr SP = 0x81; sfr SRELH = 0xBA; sfr SRELL = 0xAA; sfr SYSCON = 0xB1; sfr T2CCH1 = 0xC3;
197
Modelarea convertoarelor n comutaie_______________________________________________
sfr T2CCH2 = 0xC5; sfr T2CCH3 = 0xC7; sfr T2CCL1 = 0xC2; sfr T2CCL2 = 0xC4; sfr T2CCL3 = 0xC6; sfr T2CON = 0xC8; sfr TCON = 0x88; sfr TH0 = 0x8C; sfr TH1 = 0x8D; sfr TH2 = 0xCD; sfr TL0 = 0x8A; sfr TL1 = 0x8B; sfr TL2 = 0xCC; sfr TMOD = 0x89; sfr TRCON = 0xFF; // located in the mapped SFR area sfr VR0 = 0xFC; // located in the mapped SFR area sfr VR1 = 0xFD; // located in the mapped SFR area sfr VR2 = 0xFE; sfr WDTREL = 0x86; sfr XPAGE = 0x91; // SFR bit definitions // ADCON0 sbit ADM = 0xDB; sbit BD = 0xDF; sbit BSY = 0xDC; sbit CLK = 0xDE; sbit MX0 = 0xD8; sbit MX1 = 0xD9; sbit MX2 = 0xDA; // IEN0 sbit EA = 0xAF; sbit ES = 0xAC; sbit ET0 = 0xA9; sbit ET1 = 0xAB; sbit ET2 = 0xAD; sbit EX0 = 0xA8; sbit EX1 = 0xAA; sbit WDT = 0xAE; // IEN1 sbit EADC = 0xB8; sbit EX2 = 0xB9; sbit EX3 = 0xBA; sbit EX4 = 0xBB; sbit EX5 = 0xBC; sbit EX6 = 0xBD; sbit SWDT = 0xBE; // IRCON sbit IADC = 0xC0; sbit IEX2 = 0xC1; sbit IEX3 = 0xC2; sbit IEX4 = 0xC3; sbit IEX5 = 0xC4; sbit IEX6 = 0xC5; sbit TF2 = 0xC6; // PCON1 (located in the mapped SFR area) sbit EWPD = 0x8F; sbit WS = 0x8C; // SCON sbit RB8 = 0x9A; sbit REN = 0x9C; sbit RI = 0x98; sbit SM0 = 0x9F; sbit SM1 = 0x9E; sbit SM2 = 0x9D; sbit TB8 = 0x9B; sbit TI = 0x99; // T2CON sbit I2FR = 0xCD; sbit I3FR = 0xCE; sbit T2CM = 0xCA; sbit T2I = 0xC8; sbit T2PS = 0xCF; sbit T2R = 0xCC; // TCON sbit IE0 = 0x89; sbit IE1 = 0x8B; sbit IT0 = 0x88; sbit IT1 = 0x8A; sbit TF0 = 0x8D; sbit TF1 = 0x8F; sbit TR0 = 0x8C; sbit TR1 = 0x8E; #include <intrins.h> #include "ADC.H" #include "CCU.H" #include "USART.H" #endif // ifndef _MAIN_H_ #include "MAIN.H" // USER CODE BEGIN (CCU_General,7) uword ADC_VAL1 = 0; uword reference = 127; uword step = 1; uword duty =0; uword i = 0; uword cnt = 0;
198
Universitatea Tehnic din Cluj-Napoca_______________________________________________
uword ADC = 0; void CCU_vInit(void) { // init all CT1CON bits apart from CT1R CT1CON = 0x80; CCPL = 0xFA; CCPH = 0x00; CT1OFL = 0x00; CT1OFH = 0x00; /// Compare Timer 2 // init all CT2CON bits apart from CT2R CT2CON = 0x10; CP2L = 0xE7; CP2H = 0x03; BCON = 0x00; // init all BCON bits apart from BCEN, BCM1, BCM0 /// Channel 0 (COMP Unit) /// Duty Cycle: 10 % /// Channel 1 (COMP Unit) /// Channel 2 (COMP Unit) /// Duty Cycle: 50 % COINI = 0xFE; CMSEL1 = 0x00; CMSEL0 = 0x01; CCH0 = 0x00; CCL0 = 0xE1; CCH1 = 0x00; CCL1 = 0x00; CCH2 = 0x00; CCL2 = 0x7D; CMP2H = 0x01; CMP2L = 0xF4; CCIE = 0x40; // set the shadow transfer enable bits for both timers CT1CON |= 0x20; // set STE1 CT2CON |= 0x20; // set STE2 COTRAP = 0x00; TRCON = 0x00; IEN2 |= 0x20; CT1CON |= 0x08; // start compare timer 1 (CT1R) } // End of function CCU_vInit void CCU_viTmr1(void) interrupt CCU_T1INT { if(((CCIR & 0x40) != 0)) // if count direction change interrupt (CT1FC) { CCIR &= ~0x40; // clear CT1FC // USER CODE BEGIN (CCU_IsrTmr1,2) cnt++; if (cnt >= 9) { ADCON1 = 0x40; //select CH1 ADC_VAL1 = ADC_ubRead8Bit(); ADCON1 = 0x42; //select CH2 ADC = ADC_ubRead8Bit(); //read CH2 reference = ADC; cnt = 0; //reset cnt } duty = CCU_uwGetCCxReg(CCU_0); if(ADC_VAL1 <= reference) { duty -= step; ADC_VAL1 += step; } if (ADC_VAL1 >= reference) { duty += step; ADC_VAL1 -= step; } CCU_vSetCCxReg(CCU_0,duty); CCU_vTransferShadow(CCU_TIMER_1); // USER CODE END } cnt +=1; } // End of function CCU_viTmr1 #define CCU_TIMER_1 CT1CON #define CCU_TIMER_2 CT2CON #define CCU_0 0 #define CCU_1 1 #define CCU_2 2 #define CCU_3 3 void CCU_vInit(void); #define CCU_uwGetCCxReg(RegName) ((((uword)_CCH(RegName)) << 8) + _CCL(RegName)) #define CCU_vSetCCxReg(RegName, Value) \ { uword uwTmp = Value; _CCH(RegName) = (ubyte)(uwTmp >> 8); _CCL(RegName) = (ubyte)uwTmp; } #define _CCH(CNr) _CCH##CNr #define _CCL(CNr) _CCL##CNr #define _CCH0 CCH0 #define _CCL0 CCL0 #define _CCH1 CCH1 #define _CCL1 CCL1 #define _CCH2 CCH2
199
Modelarea convertoarelor n comutaie_______________________________________________
#define _CCL2 CCL2 #define _CCH3 CMP2H #define _CCL3 CMP2L #define CCU_vSetTmr1Offset(Value) \ { uword uwTmp = Value; CMP2H = (ubyte)(uwTmp >> 8); CMP2L = (ubyte)uwTmp; } CCU_vTransferShadow. #define CCU_vSetTmrPeriod(TimerReg, Value) \ { uword uwTmp = Value; CCU_vPeriodL(TimerReg, L, uwTmp); CCU_vPeriodH(TimerReg, H, uwTmp); } #define CCU_vPeriodH(TimerReg, H, Value) TimerReg##H = (ubyte)((Value) >> 8) #define CCU_vPeriodL(TimerReg, L, Value) TimerReg##L = (ubyte)(Value) #define CCU_vStartTmr(TimerNr) TimerNr |= 0x08 #define CCU_vStopTmr(TimerNr) TimerNr &= ~0x08 #define CCU_vTransferShadow(TimerNr) TimerNr |= 0x20 #include "MAIN.H" void ADC_vInit(void) { /// total conversion time = 9.6 s ADCON1 |= 0x80; // set ADCL1 ADCON1 &= ~0x40; // clear ADCL0 /// ---------- Conversion Mode -----------/// continuous conversion (ADM=1) ADM = 1; } // End of function ADC_vInit bit ADC_bReady(void) { ubyte ubResult; ubResult = 0; // check the A/D converter interrupt request flag if (IADC) { // flag has to be reset by software IADC = 0; ubResult = 1; } return(ubResult); } // End of function ADC_bReady uword ADC_uwRead10Bit(void) { uword uwData; uwData = ADDATH; uwData <<= 8; uwData |= ADDATL; uwData >>= 6; return(uwData); } // End of function ADC_uwRead10Bit #ifndef _ADC_H_ #define _ADC_H_ #define CHANNEL_0 0 #define CHANNEL_2 2 #define ADC_MODE_SINGLE 0 #define ADC_MODE_CONT 1 void ADC_vInit(void); bit ADC_bReady(void); uword ADC_uwRead10Bit(void); #define ADC_vStart(Channel, Mode) \ { ADCON1 = ADCON1 & 0xF8 | (Channel); ADM = Mode; ADDATL = 0; } #define ADC_vStop() ADM = 0 #define ADC_bBusy() BSY #define ADC_ubRead8Bit() ADDATH #endif // ifndef _ADC_H_
200
Universitatea Tehnic din Cluj-Napoca_______________________________________________
a)
b)
c)
d)
Fig. A3.2.2 Semnalul PWM genearat de microcontroller penru:
a) tensiune de intrare constant E 10V, tensiune de referin 5V, curent de sarcin 100mA b) tensiune de intrare constant E 10V, tensiune de referin 7,5V, curent de sarcin 200mA c) tensiune de intrare 13V, tensiune de referin 7,5V d) tensiune de intrare 5V tensiune de referin 5V, tensiune de ieire obinut 4,9V
Formele de und ale semnalelor de comand generate de microcontroller sunt inversate datorit trecerii acestora printr-un optocuplor care inverseaz semnalele.
Fig. A3.2.3 Schema convertorului Buck comandat de la microcontrollerul C508
201
Modelarea convertoarelor n comutaie_______________________________________________
Anexa 3.4
Platforma Matlab de proiectare i simulare a convertoarelor CC-CC
Fig. A3.4.1 Organigrama Platformei Matlab
Fiierul Start
clear all close all clc %============================================ % Tipul convertorului si modul de functionare tip=1; mod=1; %============================================ %============ Date de intrare =============== E=12.5; Us=25; DU=0.8; Is=1; alfa1=2; fcom=20000; %=========================================== %========== Reprezentari grafice =========== p=1; N=10; %=========================================== %=========== Apelare functie =============== [R,L,C,D,Lmin,Imax,Imin,DI]=calcule(tip,mod,E,Us,DU,Is,alfa1,fcom); interfata(tip,mod,E,Us,DU,Is,alfa1,fcom,R,L,C,D,Lmin,Imax,Imin,DI,N,p); rezolvare_ode(E,R,L,C,D,fcom,N,tip,p,mod);
202
Universitatea Tehnic din Cluj-Napoca_______________________________________________
Fiierul Calcule
function [R,L,C,D,Lmin,Imax,Imin,DI]=calcule( tip,mod,E,Us,DU,Is,alfa1,fcom); T=1/fcom; if alfa1 == 1 alfa=1.1; ss=0.9; elseif alfa1==2 alfa=1.2; ss=0.8; elseif alfa1==3 alfa=1.3; ss=0.7; elseif alfa1==4 alfa=1.4; ss=0.6; elseif alfa1==5 alfa=1.5; ss=0.5; end if (tip==1) && (Us>E) Us=E/2; elseif (tip==2) && (E>Us) Us=E*2; end if (tip==1) && (mod==1) D=Us/E; Imax=alfa*Is; Imin=Is*(2-alfa); DI=Imax-Imin; R=Us/Is; Lmin=0.5*R*T*(1-D); L=(E*D*(1-D)*T)/DI; C=((EUs)*Us)/(8*E*L*(fcom^2)*DU); elseif (tip==1) && (mod==2) R=Us/Is; v=Us./E; Lmin=0.5*R*T*(1-v); L=ss*Lmin; D=v.*sqrt(2.*L./(R.*T.*(1-v))); Imax=((E-Us)*T*D)/L; Imin=0; DI=Imax-Imin; C=((EUs)*Us)/(8*E*L*(fcom^2)*DU); end if (tip==2) && (mod==1) D=(Us-E)/Us; R=Us/Is; C=(Us-E)/(R*fcom*DU); Lmin=0.5*R*T*D*(1-D)^2; %Imax=Is*Us/E+(E*T/2*L)*(1E/Us); DI=2*(alfa-1)*Is; L=(Us-E)*E/(Us*fcom*DI); Imax=(Is/(1-D))+DI/2; Imin=Imax-DI;
Fiierul difereniale
function dy=diferentiale(t,y,E,R,L,C,tip,int) dy=zeros(2,1); switch tip case 1 %---- Buck -----% if int==1 a=1;b=1;c=1; elseif int==2 a=0;b=1;c=1; else a=0;b=0;c=0; end case 2 %---- Boost ----% if int==1 a=1;b=0;c=0; elseif int==2 a=1;b=1;c=1; else a=0;b=0;c=0; end case 3 %---Buck-Boost---% if int==1 a=1;b=0;c=0; elseif int==2 a=0;b=1;c=1; else a=0;b=0;c=0; end end dy(1)=(a.*E-b.*y(2))./L; % Curent dy(2)=(c.*y(1)y(2)./R)./C; % Tensiune
Fiierul detectare
function [value,isterminal,direction] =detectare(t,y,E,R,L,C,tip,int); value = y(1); % detect iL = 0 isterminal = 1; % stop the integration direction = -1; % negative direction
203
Modelarea convertoarelor n comutaie_______________________________________________
Fiierul rezolvare_ode
function rezolvare_ode(E,R,L,C,D,fcom,N,tip,p ,mod) t=0; y=[0 0]; T=1/fcom; N1=3; for k=1:N nt=length(t); % -----------------------interval=1; t0=(k-1).*T; tf=t0+D.*T; ci=y(nt,:); int=1; [t,y]=ode45(@diferentiale,[t0,tf],[c i],[],E,R,L,C,tip,int); nt=length(t); pp=y(:,1).*y(:,2); pp1=max(pp); pp2=min(pp); ppp=sqrt(((pp1.^2)-(pp2.^2))/2); %----------------------subplot(3,2,2); plot(t,y(:,1),'r');%grid on;hold on; subplot(3,2,4); plot(t,y(:,2),'r');%grid on;hold on; subplot(3,2,6); plot(t,pp,'r'); %---------------------if (p==0)&&(k<=N-N1) subplot(3,2,2); hold off; subplot(3,2,4); hold off; subplot(3,2,6); hold off; else subplot(3,2,2); hold on; subplot(3,2,4); hold on; subplot(3,2,6); hold on; end %---------------------interval=2; t0=(k-1).*T+D.*T; tf=k.*T; ci=y(nt,:); int=2; options=odeset('Events',@detectare); [t,y,te,ye,ie]=ode45(@diferentiale,[ t0,tf],[ci],[options],E,R,L,C,tip,in t); nt=length(t); te; pp=y(:,1).*y(:,2); pp1=max(pp); pp2=min(pp); ppp=sqrt(((pp1.^2)-(pp2.^2))/2); %----------------------subplot(322 plot(t,y(:,1),'b');%grid on;hold on; subplot(324) plot(t,y(:,2),'b');%grid on;hold on; subplot(3,2,6); plot(t,pp,'r'); if (p==0)&&(k<=N-N1) subplot(3,2,2); hold off; subplot(3,2,4); hold off; subplot(3,2,6); hold off; else subplot(3,2,2); hold on; subplot(3,2,4); hold on; subplot(3,2,6); hold on; end %---------------------------interval=3; if te>0; t0=t(nt); tf=k.*T; ci=y(nt,:); int=3; [t,y]=ode45(@diferentiale,[t0,tf],[c i],[],E,R,L,C,tip,int); nt=length(t); pp=y(:,1).*y(:,2); pp1=max(pp); pp2=min(pp); ppp=sqrt(((pp1.^2)-(pp2.^2))/2); %----------------------subplot(322); plot(t,y(:,1),'g');%grid on;hold on; subplot(324); plot(t,y(:,2),'g');%grid on;hold on; subplot(3,2,6); plot(t,pp,'r'); %------------------if (p==0)&&(k<=N-N1) subplot(3,2,2); hold off; subplot(3,2,4); hold off; subplot(3,2,6); hold off; else subplot(3,2,2); hold on; subplot(3,2,4); hold on; subplot(3,2,6); hold on; end %--------------------end end %=================================== ========= Q=(sqrt(L./C))./R; if tip==1 subplot(3,2,2);grid on;
204
Universitatea Tehnic din Cluj-Napoca_______________________________________________
ylabel(['iL [ A ]']); title(['Circuit Buck - Coborator de tensiune']); subplot(3,2,4);grid on; if L>=0.5*R*T*(1-D); Us=D.*E; else v=2.*D./(D+sqrt(D.^2+8.*L./(R.*T))); Us=v*E; end ylabel(['Us [ V ]']); title([' Us = ',num2str(Us)]); subplot(3,2,6);grid on; xlabel(['Timp [s]']); ylabel('P [W]'); sss=imread('buck.png'); subplot('position',[0.05 0.05 0.25 0.22]) image(sss); axis off; elseif tip==2 subplot(3,2,2);grid on; ylabel(['iL [ A ]']); title(['Circuit Boost Ridicator de tensiune']); subplot(3,2,4); grid on; ylabel(['Us [ V ]']); %title([' Us = ',num2str(Us)]); subplot(326) grid on; xlabel(['Timp [s]']); xlabel(['Timp [s]']); title([' Q = ',num2str(Q)]) sss=imread('boost.png'); subplot('position',[0.05 0.05 0.25 0.22]) image(sss); axis off; elseif tip==3 subplot(3,2,2);grid on; ylabel(['iL [ A ]']); title(['Circuit Buck-Boost Inversor de tensiune']); xlabel(['Timp [s]']); subplot(3,2,4);grid on; ylabel(['Us [ V ]']); subplot(326) grid on; xlabel(['Timp [s]']); ylabel(['P [W]']) sss=imread('buck_boost.png'); subplot('position',[0.05 0.05 0.25 0.22]) image(sss); axis off; end
205
Modelarea convertoarelor n comutaie_______________________________________________
Anexa 4.1.
Platforma Matlab de simulare a invertoarelor rezonante n semipunte
Platforma Matlab implementat pentru simularea invertoarelor rezonante n semipunte realizat pe baza sistemelor de ecuaii difereniale deduse pentru acest invertor, este realizat din trei fiiere care se apeleaz succesiv pentru obinerea formelor de und ale mrimilor de interes. Fiierul de iniializare a valorilor componentelor invertorului apel_semipunte, iniializeaz valorile componentelor i apeleaz fiierul n care se rezolv plotarea formelor de und i interfaa grafic.
clear all; close all; E=310; C2=680e-9; C3=680e-9; C4=22e-9; C5=22e-9; R=4.4; L=55e-6; C=1e-6; T2=2.*pi.*sqrt(L.*(C2+C3)); % 54 us %------------------------T=51e-6; Tc=2.2e-5; % Tc<T2./2=27 us dt=4e-6; %timpul de intarziere dintre semnale N=10; p=1; ed_semipunteRL(E,C2,C4,R,L,Tc,dt,N,p); % se apeleaza fisierul de calcul
Fiierul ed_semipunte, realizeaz interfaa grafic a platformei i returneaz formele de und ale invertorului.
function ed_semipunteRL(E,C2,C4,R,L,Tc,dt,N,p); Fig=figure('Name',' Circuit semipunte cu sarcina RL ',... 'Units','normalized',... 'Color','w',... 'Position',[.05 .05 .9 .9],... 'Numbertitle','off'); % -----------------------% creaza 8 butoane text B_T; % 7 caractere txt=['E [ V ] C2[ F] C4[ F] R[ohm] L[ H] Tc[ s] dt[ s] N ']; for k=1:8 B_T(k)=uicontrol('Style','text', ... 'Units','normalized', ... 'Position',[0.95 0.95-0.07*(k-1) 0.04 0.03], ... 'backgroundcolor',get(gcf,'color'),... 'foregroundcolor','black',... 'String',txt((7.*(k-1))+1:7.*k), ...
206
Universitatea Tehnic din Cluj-Napoca_______________________________________________
'Callback','close; '); end %-----------------------% Creaza 8 Butoane edit B_E ; xc= 'str2num(get(gco,''String''));close;ed_semipunteRL(E,C2,C4,R,L,Tc,dt,N,p)'; uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.95 0.92 0.04 0.03],... 'backgroundcolor',get(gcf,'color'),... 'String',E,... 'Callback',['E=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.95 0.85 0.04 0.03],... 'backgroundcolor',get(gcf,'color'),... 'String',C2,... 'Callback',['C2=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.95 0.78 0.04 0.03],...
207
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
'backgroundcolor',get(gcf,'color'),... 'String',C4,... 'Callback',['C4=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.95 0.71 0.04 0.03],... 'backgroundcolor',get(gcf,'color'),... 'String',R,... 'Callback',['R=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.95 0.64 0.04 0.03],... 'backgroundcolor',get(gcf,'color'),... 'String',L,... 'Callback',['L=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.95 0.57 0.04 0.03],... 'backgroundcolor',get(gcf,'color'),... 'String',Tc,... 'Callback',['Tc=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.95 0.50 0.04 0.03],... 'backgroundcolor',get(gcf,'color'),... 'String',dt,... 'Callback',['dt=',xc]); uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.95 0.43 0.04 0.03],... 'backgroundcolor',get(gcf,'color'),... 'String',N,... 'Callback',['N=',xc]); %---------------Bp=uicontrol('Style','pushbutton',... 'Units','normalized',... 'Position',[0.94 0.35 0.05 0.04],... 'String','Permanent',... 'Callback','p=0;close;ed_semipunteRL(E,C2,C4,R,L,Tc,dt,N,p);'); if p==0 set(Bp,'String','Tranzitoriu'); set(Bp,'Callback','p=1;close;ed_semipunteRL(E,C2,C4,R,L,Tc,dt,N,p);'); end f=uimenu('Label','Documentatie'); %-------------------Calcule a=0.5.*R./L; w2=sqrt(1./(L.*(C2+C2))-a.^2) T2=2.*pi./w2; Q=sqrt(L./(C2+C2))./R; Ce=2.*C2.*C4./(C2+C4); we=sqrt(1./(L.*Ce)-a.^2); Te=2.*pi./we; %======================================== % Rezolvare ec. dif; % u=[iL,uC2,uC3,uC4,uC5] T=2.*(Tc+dt)
208
Modelarea convertoarelor n comutaie_______________________________________________
y=[0,E./2,E./2,0,E]; t=0; k=1; for k=1:N %======================================================= % Etapa 1 conduce K-sus %--------------------------nt=length(t) ci=y(nt,:); t0=(k-1).*T; tf=t0+Tc; Di=(E-y(nt,3)-R.*y(nt,1))./L; Bi=y(nt,1); Ai=(Di+a.*Bi)/w2; Au2=(a.*Ai-w2.*Bi)./((C2+C2).*(a.^2+w2.^2)); Bu2=(a.*Bi+w2.*Ai)./((C2+C2).*(a.^2+w2.^2)); Ku2=y(nt,2)-Bu2; tmax=t0+atan(-(a.*Bi-w2.*Ai)./(w2.*Bi+a.*Ai))./w2; [t,y]=ode45(@ec_K_sus,[t0 tf],[ci],[],E,C2,R,L); nt=length(t); Imax=max(y(:,1)); us=y(:,2); % C2 se incarca C3 se descarca iL=(Ai.*sin(w2.*(t-t0))+Bi.*cos(w2.*(t-t0))).*exp(-a.*(t-t0)); iLmax=(Ai.*sin(w2.*(tmax-t0))+Bi.*cos(w2.*(tmax-t0))).*exp(-a.*(tmaxt0)); uC2=Ku2+(Au2.*sin(w2.*(t-t0))+Bu2.*cos(w2.*(t-t0))).*exp(-a.*(t-t0)); uC2max=Ku2+(Au2.*sin(w2.*(tmax-t0))+Bu2.*cos(w2.*(tmax-t0))).*exp(a.*(tmax-t0)); uC3=E-uC2; uC4=0.*ones(nt,1); uC5=E.*ones(nt,1); ul=uC5-uC3; subplot(211); plot(t,y(:,1),'b');grid on;hold on; % curentul iL subplot(212); plot(t,ul,'r');grid on;hold on; I1=y(nt,1); U21=y(nt,2); U31=y(nt,3); %======================================================= % Etapa 2 T-sus blocat Pauza dt iL>0 se incarca C4 se descarca C5 ci=y(nt,:); t02=(k-1).*T+Tc; tf2=t02+dt; Bi2=y(nt,1); Di2=(E-y(nt,4)-y(nt,3)-R.*y(nt,1))./L; Ai2=(Di2+a.*Bi2)./we; Bu5=(a.*Bi2+we.*Ai2)./(a.^2+we.^2)./(C4+C4); Au5=(a.*Ai2-we.*Bi2)./(a.^2+we.^2)./(C4+C4); Ku5=y(nt,5)-Bu5; Bu2=(a.*Bi2+we.*Ai2)./(a.^2+we.^2)./(C2+C2); Au2=(a.*Ai2-we.*Bi2)./(a.^2+we.^2)./(C2+C2); Ku2=y(nt,2)-Bu2; options=odeset('Events',@events_punte_C4); [t,y,te,ye,ie]=ode45(@ec_semipunte_C4,[t02 tf2],[ci],[options],E,C2,C4,R,L); nt=length(t);
209
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
tc=te-t02; iL2=(Ai2.*sin(we.*(t-t02))+Bi2.*cos(we.*(t-t02))).*exp(-a.*(t-t02)); uC5=Ku5+(Au5.*sin(we.*(t-t02))+Bu5.*cos(we.*(t-t02))).*exp(-a.*(t-t02)); uC4=E-uC5; uC2=Ku2+(Au2.*sin(we.*(t-t02))+Bu2.*cos(we.*(t-t02))).*exp(-a.*(t-t02)); uC3=E-uC2; us=E-y(:,4)-y(:,3); ul=uC5-uC3; subplot(211); plot(t,y(:,1),'b');grid on;hold on; % curentul iL subplot(212); plot(t,ul,'r');grid on;hold on; %=========================================== % Etapa 3 conduce T-jos ci=y(nt,:); t0=t(nt) tf3=k.*T-dt; Di=(-E+y(nt,2)-R.*y(nt,1))./L; Bi=y(nt,1); Ai=(Di+a.*Bi)/w2; Au2=(a.*Ai-w2.*Bi)./((C2+C2).*(a.^2+w2.^2)); Bu2=(a.*Bi+w2.*Ai)./((C2+C2).*(a.^2+w2.^2)); Ku2=y(nt,2)-Bu2; [t,y]=ode45(@ec_T_jos,[t0 tf3],[ci],[],E,C2,C4,R,L); nt=length(t); iL3=(Ai.*sin(w2.*(t-t0))+Bi.*cos(w2.*(t-t0))).*exp(-a.*(t-t0)); uC2=Ku2+(Au2.*sin(w2.*(t-t0))+Bu2.*cos(w2.*(t-t0))).*exp(-a.*(t-t0)); uC3=E-uC2; uC4=E.*ones(nt,1); uC5=0.*ones(nt,1); ul=uC5-uC3; us=-y(:,3); % C2 se incarca C3 se descarca subplot(211); plot(t,y(:,1),'b');grid on;hold on; % curentul iL subplot(212); plot(t,ul,'r');grid on;hold on; %======================================================= % Etapa 4 T-jos blocat Pauza dt iL<0 se incarca C5 se descarca C4 ci=y(nt,:); t04=k.*T-dt tf4=t04+dt Bi4=y(nt,1); Di4=(E-y(nt,4)-y(nt,3)-R.*y(nt,1))./L; Ai4=(Di4+a.*Bi4)/we; Bu5=(a.*Bi4+we.*Ai4)./(a.^2+we.^2)./(C4+C4); Au5=(a.*Ai4-we.*Bi4)./(a.^2+we.^2)./(C4+C4); Ku5=y(nt,5)-Bu5; Bu2=(a.*Bi4+we.*Ai4)./(a.^2+we.^2)./(C2+C2); Au2=(a.*Ai4-we.*Bi4)./(a.^2+we.^2)./(C2+C2); Ku2=y(nt,2)-Bu2; options = odeset('Events',@events_punte_C5); [t,y,te,ye,ie]=ode45(@ec_semipunte_C4,[t04 tf4],[ci],[options],E,C2,C4,R,L); nt=length(t); t4=te-t04; iL4=(Ai4.*sin(we.*(t-t04))+Bi4.*cos(we.*(t-t04))).*exp(-a.*(t-t04)); uC5=Ku5+(Au5.*sin(we.*(t-t04))+Bu5.*cos(we.*(t-t04))).*exp(-a.*(t-t04));
210
Modelarea convertoarelor n comutaie_______________________________________________
uC4=E-uC5; uC2=Ku2+(Au2.*sin(we.*(t-t04))+Bu2.*cos(we.*(t-t04))).*exp(-a.*(t-t04)); uC3=E-uC2; ul=uC5-uC3; us=E-y(:,4)-y(:,3); % uC2 creste uC3 scade subplot(211); plot(t,y(:,1),'b');grid on;hold on; % curentul iL subplot(212); plot(t,ul,'r');grid on;hold on; %======================================================= % Etapa 5 conduce D-sus %--------------------------ci=y(nt,:); t05=t(nt); tf5=k.*T Di=(E-y(nt,3)-R.*y(nt,1))./L; Bi=y(nt,1); Ai=(Di+a.*Bi)/w2; Au2=(a.*Ai-w2.*Bi)./((C2+C2).*(a.^2+w2.^2)); Bu2=(a.*Bi+w2.*Ai)./((C2+C2).*(a.^2+w2.^2)); Ku2=y(nt,2)-Bu2; [t,y]=ode45(@ec_K_sus,[t05 tf5],[ci],[],E,C2,R,L); nt=length(t); t5=tf5-t05; Imax=max(y(:,1)); us=y(:,2); % uC2 creste uC3 scade iL=(Ai.*sin(w2.*(t-t05))+Bi.*cos(w2.*(t-t05))).*exp(-a.*(t-t05)); uC2=Ku2+(Au2.*sin(w2.*(t-t05))+Bu2.*cos(w2.*(t-t05))).*exp(-a.*(t-t05)); uC3=E-uC2; uC4=0.*ones(nt,1); uC5=E.*ones(nt,1); ul=uC5-uC3; subplot(211); plot(t,y(:,1),'b');grid on;hold on; % curentul iL subplot(212); plot(t,ul,'r');grid on;hold on; % subplot(321); I1=y(nt,1); U21=y(nt,2); U31=y(nt,3); %============================================== if (p==0)&(j<N-2) subplot(211); hold off; subplot(212); hold off; end subplot(211); if p==0 title(['Circuit semipunte-Regim permanent ']); else title(['Circuit semipunte-Regim tranzitoriu ']); end end %-----------------------------------------------------% Personalizarea graficelor subplot(211); ylabel('iL [ A ]'); xlabel(['Q= ',num2str(Q)]);
211
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
subplot(212); ylabel('uL [ V ]'); %========================================= function dy=ec_K_sus(t,y,E,C2,R,L) % Etapa 1 conduce T-sus dy=zeros(5,1); % [iL,Uc2,Uc3] dy(1)=(E-y(3)-R.*y(1))./L; %derivata iL=y(1); dy(2)=-y(1)./(C2+C2); %derivata uC2=y(2) ;C2 se descarca dy(3)=-dy(2); %derivata uC3=y(3); %C3 se incarca dy(4)=0; dy(5)=0; %============================================== function dy=ec_T_con(t,y,E,C2,C4,R,L,Rt) dy=zeros(5,1); % [iL,Uc2,Uc3,Uc4,Uc5] dy(1)=(-E+y(2)-R.*y(1))./L; %derivata iL=y(1); dy(2)=-y(1)./(C2+C2); %derivata uC2=y(2); %C2 se incarca dy(3)=-dy(2); %derivata uC3=y(3); dy(4)=(y(1)+y(5)./Rt)./(C4+C4); dy(5)=-dy(4); %========================================= function dy=ec_T_jos(t,y,E,C2,C4,R,L) dy=zeros(5,1); % [iL,Uc2,Uc3,Uc4,Uc5] dy(1)=(-E+y(2)-R.*y(1))./L; %derivata iL=y(1); dy(2)=-y(1)./(C2+C2); %derivata uC2=y(2); %C2 se incarca dy(3)=-dy(2); %derivata uC3=y(3); dy(4)=0; dy(5)=-dy(4); %========================================= function dy=ec_semipunte_Djos(t,y,E,C2,C4,R,L) dy=zeros(5,1); % [iL,Uc2,Uc3,Uc4,Uc5] dy(1)=(-E+y(2)-R.*y(1))./L; %derivata iL=y(1); dy(2)=-y(1)./(C2+C2); %derivata uC2=y(2); %C2 se incarca dy(3)=-dy(2); %derivata uC3=y(3); dy(4)=0; dy(5)=-dy(4); %========================================= function dy=ec_semipunte_Dsus(t,y,E,C2,C4,R,L) %========================================= dy=zeros(5,1); % [iL,Uc2,Uc3,Uc4,Uc5] dy(1)=(E-y(3)-R.*y(1))./L; %derivata iL=y(1); dy(2)=-y(1)./(C2+C2); %derivata uC2=y(2); %C2 se incarca dy(3)=-dy(2); %derivata uC3=y(3); dy(4)=0; dy(5)=0; function dy=ec_semipunte_C4(t,y,E,C2,C4,R,L) % Etapa 2 T-sus blocat dy=zeros(5,1); % [iL,Uc2,Uc3,Uc4,Uc5] dy(1)=(E-y(4)-y(3)-R.*y(1))./L; %derivata iL=y(1); dy(2)=-y(1)./(C2+C2); %derivata uC2=y(2); %C2 se descarca dy(3)=-dy(2); %derivata uC3=y(3); %C3 se incarca dy(4)=y(1)./(C4+C4); %derivata uC4=y(4); %C4 se incarca dy(5)=-dy(4); %derivata uC5=y(5); %C5 se descarca function [value,isterminal,direction] = events_Djos(t,y,E,C2,C4,R,L,Rt) value = y(1); % detect iL= 0 isterminal = 1; % stop the integration direction = -1; % descendent
212
Modelarea convertoarelor n comutaie_______________________________________________
%------------------------------------------------------------------function [value,isterminal,direction] = events_punte_Dsus(t,y,E,C2,C4,R,L) value = y(1); % detect iL= 0 isterminal = 1; % stop the integration direction = 1; % ascendent %------------------------------------------------------------------function [value,isterminal,direction] = events_punte_C4(t,y,E,C2,C4,R,L) value = y(5); % detect uC5= 0 isterminal = 1; % stop the integration direction = -1; % descendent %------------------------------------------------------------------function [value,isterminal,direction] = events_punte_C5(t,y,E,C2,C4,R,L) value = y(4); % detect uC4= 0 isterminal = 1; % stop the integration direction = -1; % descendent
213
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
Anexa 4-4.
Platforma Matlab de simulare a invertoarelor rezonante n punte comandate.
Fiierul de iniializare a valorilor invertorului: start_inv_asincron
clear all; close all; E=310; R=4.4; L=0.004; C=5.*10.^(-6); N=7; m=1.2; p=1; ed_inv(E,R,L,C,N,m,p);
Fiierul funcie de interfaare grafic i reprezentare a soluiilor ecuaiilor invertorului:
function ed_inv(E,R,L,C,N,m,p); %-----------------------------------% Crearea unei figuri; Fig=figure('Name','Invertor monofazat, rezonant in punte',... 'Numbertitle','off',... 'Units','normalized',... 'Position',[0.05 0.1 0.9 0.8],... 'color',[0.75 0.75 0.75] ); xc = 'str2num(get(gco,''String''));close;ed_inv(E,R,L,C,N,m,p)'; %---------------------------------------------------------------------intrare=uipanel('BackgroundColor',[0.75,0.75,0.75],... 'ForegroundColor','black',... 'Title','Date de intrare',... 'FontSize',11,... 'TitlePosition','centertop',... 'Position',[0.05 0.6 0.2 0.35]); BEt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.8 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'E [V]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',intrare); BEe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.83 0.4 0.15],... 'String',E,... 'Callback',['E=',xc],... 'Parent',intrare); BRt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.6 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white'
214
Modelarea convertoarelor n comutaie_______________________________________________
'ForegroundColor','black',... 'String', 'R [Ohm]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',intrare); BRe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.63 0.4 0.15],... 'String',R,... 'Callback',['R=',xc],... 'Parent',intrare); BLt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.4 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'L [H]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',intrare); BDUe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.43 0.4 0.15],... 'String',L,... 'Callback',['L=',xc],... 'Parent',intrare); BCt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.2 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'C [F]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',intrare); BCe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.23 0.4 0.15],... 'String',C,... 'Callback',['C=',xc],... 'Parent',intrare); Bmt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.01 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'm = Tc/Tr ',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',intrare); Bme=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.04 0.4 0.15],...
215
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
'String',m,... 'Callback',['m=',xc],... 'Parent',intrare); iesire=uipanel('BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'Title','Date de iesire',... 'FontSize',11,... 'TitlePosition','centertop',... 'Position',[0.05 0.25 0.2 0.35]); %-------------------------------------% Efectuarea calculelor pentru invertor Zr=sqrt(L./C); Q=Zr./R; % Q=(1./R).*sqrt(L./C); a=0.5.*R./L; wr=1./sqrt(L.*C); Tr=2.*pi./wr; %fr=1./Tr; w=wr.*sqrt(1-1./(2.*Q).^2); a0=exp(-pi./(2.*Q)); y0=(1+a0)./(1-a0); if Q == 0.5 T=Tr; else T=2.*pi./w; end if m==1 Tc=1.0.*T; else Tc=m.*Tr; end w=(2*pi)./Tc; dw=w-wr; phy=atan(2*Q*(dw/wr)); u=[0,0]; t=0; t1=[]; u1=[]; ud1=[]; id1=[]; %-----------------k=1; for k=1:N nt=length(t); t0=(k-1).*Tc; tf=t0+Tc./2; ci=u(nt,:); U0=u(nt,2); I0=u(nt,1); [t,u]=ode45('ec_inv',[t0,tf],[ci],[],E,R,L,C); %----------------------Circuit RLC serie alimentat +E Du=I0./C; Di=(E-R.*I0-U0)./L; Au=U0-E; Ai=I0; if Q ==0.5 Bu=Du+a.*Au; Bi=Di+a.*Ai; uc=E+(Au+Bu.*(t-t0)).*exp(-a.*(t-t0));
216
Modelarea convertoarelor n comutaie_______________________________________________
ic=(Ai+Bi.*(t-t0)).*exp(-a.*(t-t0)); else Bu=(Du+a.*Au)./w; Bi=(Di+a.*Ai)./w; uc=E+(Au.*cos(w.*(t-t0))+Bu.*sin(w.*(t-t0))).*exp(-a.*(t-t0)); ic=(Ai.*cos(w.*(t-t0))+Bi.*sin(w.*(t-t0))).*exp(-a.*(t-t0)); end nt=length(t); u(nt,2); u(nt,1); ud=E.*ones(nt,1); id=ud./R; t1=[t1;t(2:nt)]; u1=[u1;u(2:nt,:)]; ud1=[ud1;ud(2:nt,1)]; id1=[id1;id(2:nt,1)]; %++++++++++++++++++++ UCmax11=max(u(:,2)); Imax1=max(u(:,1)); %++++++++++++++++++++ subplot(232); %curent plot(t,u(:,1),'r');grid on;hold on; subplot(235); % tensiune plot(t,u(:,2),'r');grid on;hold on; subplot(236); % power plot(t,u(:,1).*u(:,2),'r');grid on;hold on; t0=t(nt); tf=k.*Tc; ci=u(nt,:); U1=u(nt,2); I1=u(nt,1); %--------------------Circuit RLC serie alimentat -E Du=I1./C; Di=(-E-R.*I1-U1)./L; Au=U1+E; Ai=I1; [t,u]=ode45('ec_inv',[t0,tf],[ci],[],-E,R,L,C); if Q ==0.5 Bu=Du+a.*Au; Bi=Di+a.*Ai; uc=-E+(Au+Bu.*(t-t0)).*exp(-a.*(t-t0)); ic=(Ai+Bi.*(t-t0)).*exp(-a.*(t-t0)); else Bu=(Du+a.*Au)./w; Bi=(Di+a.*Ai)./w; uc=-E+(Au.*cos(w.*(t-t0))+Bu.*sin(w.*(t-t0))).*exp(-a.*(t-t0)); ic=(Ai.*cos(w.*(t-t0))+Bi.*sin(w.*(t-t0))).*exp(-a.*(t-t0)); end nt=length(t); UCmax12=max(u(:,2)); ud=-E.*ones(nt,1); id=ud./R; t1=[t1;t(2:nt)]; u1=[u1;u(2:nt,:)]; ud1=[ud1;ud(2:nt,1)]; id1=[id1;id(2:nt,1)]; %-----------------------
217
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
subplot(232); % curent plot(t,u(:,1),'b');grid on;hold on; subplot(235); % tensiune plot(t,u(:,2),'b');grid on;hold on; title('Cu sistemul implementat'); ylabel('uC [V]') xlabel('timp [s]') subplot(236); % power plot(t,u(:,1).*u(:,2),'b');grid on;hold on; title(['Defazajul / i si u phy = ' ,num2str(phy), '[rad]']); xlabel('timp [ s ]'); ylabel('p = u * i [ W ]'); if m>1 UCmax=UCmax11 else UCmax=UCmax12 end if ((p==0)&(k<=(N-3))) subplot(232);hold off; subplot(236);hold off; subplot(235);hold off; subplot(233);hold off; else subplot(232);hold on;grid on; subplot(236);hold on;grid on; subplot(235);hold on;grid on; subplot(233);hold off; end end e1=exp(-a.*Tc./2); c1=cos(pi.*Tc./T); s1=sin(pi.*Tc./T); Numitor=(1+e1.^2+2.*e1.*c1).*(1+e1.^2-2.*e1.*c1); Umax=-E.*(e1.^2+2.*s1.*e1.*a./w-1)./(1+e1.^2+2.*e1.*c1); Imax=2.*E.*e1.*s1.*(1./(w.*L))./(1+e1.^2+2.*e1.*c1); nt1=length(t1); p1=round(nt1./N); % Regim stationar ; subplot(232); ylabel('iL [ A]'); if m==1 title('Invertor sincron Tc=T '); elseif m>1 title('Invertor asincron Tc>T '); else title('Invertor asincron Tc<T '); end subplot(233); plot(t1,ud1);hold on; grid on; xlabel(['timp [ s]']); ylabel('Ecom [ V ]') BLt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.8 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'Tr [s]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); BLe=uicontrol('Style','edit',... 'Units','normalized',...
218
Modelarea convertoarelor n comutaie_______________________________________________
'Position',[0.5 0.83 0.4 0.15],... 'String', Tr,... 'Parent',iesire); BCt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.6 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'Tc [s]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); BCe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.63 0.4 0.15],... 'String', Tc,... 'Parent',iesire); BRt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.4 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'Q ',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); BRe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.43 0.4 0.15],... 'String', Q,... 'Parent',iesire); BDt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.20 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'UCmax [V]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',iesire); BDe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.23 0.4 0.15],... 'String', UCmax,... 'Parent',iesire); BImint=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.08 0.01 0.4 0.15],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'Imax [A]',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',...
219
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
'Parent',iesire); BImine=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.5 0.03 0.4 0.15],... 'String', Imax1,... 'Parent',iesire); set(BLe,'enable','inactive','backgroundcolor','c'); set(BCe,'enable','inactive','backgroundcolor','c'); set(BRe,'enable','inactive','backgroundcolor','c'); set(BDe,'enable','inactive','backgroundcolor','c'); set(BImine,'enable','inactive','backgroundcolor','c'); %--- Selectarea Regimului de afisare ---% regim = uibuttongroup('Visible','on',... 'BackgroundColor',[0.75,0.75,0.75],... 'ForegroundColor','black',... 'Title','Regim:',... 'FontSize',10,... 'TitlePosition','centertop',... 'Tag','radiobutton',... 'Position',[0.05 0.05 0.2 0.15]); %'Parent',iesire); Bp=uicontrol('Style','push',... 'Units','normalized',... 'BackgroundColor',[0.75,0.75,0.75],... 'ForegroundColor','black',... 'Position',[0.3 0.60 0.4 0.3],... 'String','PERMANENT',... 'Callback','p=0;close;ed_inv(E,R,L,C,N,m,p)',... 'Parent',regim); if (p==0) set(Bp,'String','TRANZITORIU'); set(Bp,'Callback','p=1;close;ed_inv(E,R,L,C,N,m,p);'); end BNt=uicontrol('Style','text',... 'Units','normalized',... 'Position',[0.25 0.13 0.1 0.2],... 'BackgroundColor',[0.75,0.75,0.75],...'white' 'ForegroundColor','black',... 'String', 'N ',... 'Fontsize', 9,... 'FontWeight','demi',... 'HorizontalAlignment','left',... 'Parent',regim); BNe=uicontrol('Style','edit',... 'Units','normalized',... 'Position',[0.4 0.08 0.4 0.4],... 'String', N,... 'Tag','tempN',... 'Callback',['N=',xc],... 'Parent',regim); %--------------------------------
Fiierul funcie de rezolvare a ecuaiilor difereniale:
function du=ec_inv(t,u,flag,E,R,L,C) du=zeros(2,1); du(1)=(E-u(2)-R.*u(1))./L; % Derivata curentului ; du(2)=u(1)./C; % Derivata tensiunii ;
220
5V C5 100n R7 U1 IRF740 C6 9 VDD HIN MBR1540 C14 150n D2 C7 C15 150n R8 376n 1.5u 10 4 8 14 IRF740 IR2110 R5 1k M4 1 + C8 4 1u L2 ALIMENTARE 15V C3 220n 5 3 2 1 3 SD VCC LIN COM VSS 4 8 14 LO VS 2 VB 6 C4 220n D1 45uH HO C1 0.1u 10 Shut Down 12 13 5V 11 7 150n 2 5 L1 10 M3
5V
5V
5V
5V
ISO1
Anexa 4-6.
R1
PWM1
Vcc
R3 1k
R4 1k
R6 1k
470
7 VE 6 Vo
1 4 NC NC
6N137
GND
5V
BRIDGE
1 2 3 CON3
ISO2
R2
PWM2
Vcc
0
R13 0.1
470
3 5V 5V 5V
7 VE 6 Vo
1 4 NC NC C2 0.1u U4A 8 V+ + R11 V+ 1 + 1 R12 7 Shut Down 1k OUT 2 IN 2 - 4 V1 -5V 5V R9 5V POT R14 1k R16 Q1 27 BD135/PLP 12V 5V_M C18 0.1u R17 1k5 TEMP 1 2 CON2 C11 100u CON2 10uH L3 1 2 C9 100u COOLER 2 R15 1k 5V 5V 5V U2 LM7805/TO GND VOUT VIN 3 1 15V D4 1N5814 C17 100u 3 GND 1 C16 100u LM7812C U5 OUT 6 TL082 1k C13 1n 5 D3 1N5814 12V 15V U4B OUT 2 - 4 VTL082 -5V 2 3 8
GND
6N137
COMANDA
PWM1 PWM2
1 2 3
CON3
CON4
5V_M
ISO3
R10
1 2 3 4
Vcc
TENSIUNI C10 100u 1 2 3
470
RACIRE
7 VE 6 Vo
0
CON3 -5V LM7905/TO3 GND 2 VOUT U3 VIN 1 3 C12 100u -15V
1 4 NC NC
6N137 R18 22k C19 100n
GND
Schema electric a invertorului rezonant n clas D implementat practic.
Modelarea convertoarelor n comutaie_______________________________________________
221
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
Anexa 5-1.
Standardele de reglementare ale armonicilor curentului de intrare
O diagram de clasificare a echipamentelor electrice potrivit standardului EN61000-3-2 revizuit n 2010 este prezentat n figura urmtoare:
Figura A.5.1 Diagrama de clasificare a echipamentelor electrice conform EN61000-3-2
222
Modelarea convertoarelor n comutaie_______________________________________________
Clasa A include echipamente trifazate echilibrate; echipamente electrocasnice cu excepia celor din clasa D; unelte, cu excepia celor portabile; variatoare pentru lmpile cu incandecen i echipamentele audio. Mai mult orice alt echipament care nu se regsete n celelalte clase este considerat ca fiind n clasa A. Numrul armonicii n 3 5 7 9 11 13
15 n 39
Amplitudinea maxim admis [ A] 2,30 1,4 0,77 0,40 0,33 0,21 0.15 Armonici pare 8 n
Armonici impare
2 4 6
8 n 40
1,08 0,43 0,30 0.23 8 n
Tabel A.5.1 Limitele armonicelor de curent pentru echipamentele n Clasa A
Clasa B include unelte portabile i echipamente neprofesionale. Limitele pentru armonicele de curent ale echipamentelor din aceast clas sunt cele prezentate n tabelul A5.1 nmulite cu 1,5. Clasa C se refer la echipamentele de iluminat. n cazul echipamentelor de iluminat cu putere activ la intrare mai mare dect 25W, armonicele de curent nu trebuie s depeasc limitele armonicelor de curent prezentate n tabelul A5.2, cu excepia variatoarelor pentru lmpile cu incandecen, care se ncadreaz n clasa A. Echipamentele de iluminare cu lmpi de descrcare cu o putere activ de intrare mai mic dect 25W trebuie s ndeplineasc una din urmtoarele condiii: armonicele de curent raportate la putere nu trebuie s depeasc limitele impuse pentru echipamentele din clasa D; sau armonica a treia de curent trebuie s fie mai mic dect 86% din fundamental, iar armonica a cincea nu trebuie s depeasc 61% din fundamental.
223
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
Numrul armonicii n 2 3 5 7 9 11 n 39 numai armonicile impare
#
Amplitudinea maxim admis pentru fiecare armonic exprimat ca procent din fundamental [%] 2 30PF# 10 7 5 3
PF este factorul de putere al circuitului
Tabel A.5.2 Limitele armonicelor de curent pentru echipamentele n Clasa C
Clasa D includea iniial echipamente cu o putere activ de intrare de maxim 600W i la care forma normalizat se ncadreaz n figura A.5.2. n plus, armonicile de curent nu trebuie s depeasc limitele din tabelul A.5.3. n urma amendamentului adus n anul 2001, Clasa D cuprinde echipamente care au un impact important asupra reelei. Conform noi ncadrri din aceast categorie fac parte: calculatoarele personale, monitoarele, televizoarele, etc.
Figura. A5.2 Anvelopa curentului de intrare pentru echipamentele n clasa D
Numrul armonicii n 3 5 7 9 11
13 n 39 Doar armonicile impare
Amplitudinea maxim a armonicelor de curent raportat la putere [mA / W ] 3,4 1,9 1 0,5 0,35
Amplitudinea maxim admis [ A] 2,3 1,14 0,77 0,4 0,33 La fel ca n clasa A
3.85 n
Tabel A.5.3 Limitele armonicelor de curent pentru echipamentele n Clasa D
224
Modelarea convertoarelor n comutaie_______________________________________________
CURRICULUM VITAE
1. Nume: Tut 2. Prenume: Adrian Ctlin 3. Data i locul naterii: 21.11.1984 Baia Mare, jud. Maramure 4. Cetenie: romn 5. Stare civil: necstorit 6. Studii:
Instituia Perioada: Nivel Universitatea Tehnic Cluj-Napoca 10.2003 - 07.2008 Licen Universitatea Tehnic Cluj-Napoca 10.2008 10.2011 coala Doctoral
7. Titlul tiinific: doctorand 8. Experiena profesional:
Perioada: Locul: Instituia: Funcia: Perioada: Locul: Instituia: Funcia: 03.07.2007 30.09.2008 Cluj-Napoca SC April Electronic SRL Programator 01.10.2008 30.09.2011 Cluj-Napoca Universitatea Tehnic din Cluj Napoca Doctorand cu frecven
9. Locul de munc actual i funcia: Universitatea Tehnic Cluj-Napoca, Asistent universitar, Facultatea de Electronic i Telecomunicatii, Departamentul de Electronic Aplicat 10 . Vechime la locul de munc actual: 2 luni. 11. Lucrri elaborate i / sau publicate: Anexa 1 12. Limbi strine cunoscute: englez foarte bine , francez - mediu 13. Alte competene: Discipline predate - Bazele circuitelor electronice (anul I) - Proiectare Asistat de Calculator (anul II) - Introducere n grafic asistat de calculator (anul II) - Circuite electronice fundamentale (anul II) Cunotine Soft - MatLAB, OrCAD, C++.
225
Universitatea Tehnic din Cluj-Napoca_________________________________Tez de doctorat
Lista de publicaii
2.1 Adrian TAUT, Alin GRAMA, Ovidiu POP, Serban LUNGU Power Converters Study Regarding the ESR of an SUPERCAPACITOR, 15th International Symposium for Design and Technology of Electronics Packages SIITME, 17-20 septembrie 2009, Gyula, Ungaria, Issue 1, Conference Proceedings CD, ISBN: 978-1-4244-50330309. 2.2 Adrian TAUT, Ovidiu POP EducationalMatlab platform for Closed-Loop Simulation of Buck Converters, Novice Insight in Electronics, Communications and Information Technology, Cluj Napoca, Romnia, Issue 6, 2009, pag 69, ISSN 1842-6085. 2.3 Ovidiu Pop, Adrian TAUT, Analysis and simulation of power inverter with load variation for induction heating applications, 33rd International Spring Seminar on Electronics Technology, May 12-16, 2010, Poland, Warsaw 2.4 Serban Lungu, Adrian TAUT, Ovidiu Pop, Educational Platform for suty of Operational Amplifiers using Matlab, 33rd International Spring Seminar on Electronics Technology, May 12-16, 2010, Poland, Warsaw 2.5 Adriana Buruian, Adrian TAUT, Ovidiu Pop, Anamaria Matei, Digital Control Algoritm for DC-DC Converter, The 6TH Symposium for Students in Electronics and Telecomunications, 27 May 2010, Cluj-Napoca, Romnia. 2.6 Adrian TAUT, Serban LUNGU, Ovidiu POP Educational Platform for Cloased-loop Simulation of Power Converters, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic 2.7 Serban LUNGU, Alin GRAMA, Dorin PETREUS, Adrian TAUT Simulation and design of a Class E power Amplifier, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic 2.8 Ionel H. BACIU, Adrian TAUT, Ovidiu POP, Serban LUNGU Advanced Simulation of a Load Variation in Induction Heating Systems, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic 2.9 Ovidiu POP, Adrian TAUT Analysis and Simulation of a Half-Bridge Inverter, ISSE 2009 32nd International Spring Seminar on Electronics Technology, 13-17 May 2009, Brno, Czech Republic 2.10 Lucian Man, Ovidiu Pop, Adrian TAUT- Packaging and Thermal Analysis of a Power Inverter for Induction Heating Applications SIITME 2010 IEEE 16th International Symposium for Design and Technology in Electronic Packaging September 23-26,2010 Pitesti, Romania.
226
Modelarea convertoarelor n comutaie_______________________________________________ 2.11 Adrian TAUT, Ovidiu Pop, Serban Lungu, Power Transformers Model used for Inverters Simulation SIITME 2010 IEEE 16th International Symposium for Design and Technology in Electronic Packaging September 23-26,2010 Pitesti, Romania 2.12 O.Pop, D. Micu, A. Taut, A. Grama Analysis and simulation of a half bridge inverter for induction heating applications, 4th international Conference on Electromagnetic Fields, Health and Environment, Coimbra-Portugal, 26-28 May 2011 2.13 A . Grama, A. Taut, O. Pop, Cad Tool for a Class E Tuned Power Amplifier Design, 34th International Spring Seminar on Electronics Technology, Slovakia, Mai 11-15 2.14 A Taut, O. Pop, A . Grama, S. Lungu Educational Matlab tool for simulating of Forward Converters, 34th International Spring Seminar on Electronics Technology, Slovakia, Mai 1115, abstract proceedings, ISBN 978-80-553-0646-9 2.15 O. Pop, A Taut, A . Grama, S. Lungu Educational Matlab Tool for PID Regulators Design, 34th International Spring Seminar on Electronics Technology, Slovakia, Mai 11-15, abstract proceedings, ISBN 978-80-553-0646-9
227
S-ar putea să vă placă și
- Simulare Proiectare Convert Oar BoostDocument86 paginiSimulare Proiectare Convert Oar BoostCau23Încă nu există evaluări
- SCADA În Rețelele de Distribuție (Generalităţi)Document17 paginiSCADA În Rețelele de Distribuție (Generalităţi)Vadim GriciucÎncă nu există evaluări
- Electricitate și magnetism: Electromagnetism fenomenologicDe la EverandElectricitate și magnetism: Electromagnetism fenomenologicEvaluare: 5 din 5 stele5/5 (2)
- Carte - Actionari Electrice Reglabile Cu Masini de Curent ContinuuDocument194 paginiCarte - Actionari Electrice Reglabile Cu Masini de Curent ContinuuSeby AndreiÎncă nu există evaluări
- Proiect de Diploma Alexandru Daniel STOENESCUDocument68 paginiProiect de Diploma Alexandru Daniel STOENESCUm3ruth83% (6)
- InvertoareDocument30 paginiInvertoareCornel Cernei100% (1)
- Curs ConvertoareDocument156 paginiCurs ConvertoareMihai PupazaÎncă nu există evaluări
- Convertoare Electronice de Putere Cu Transfer de Energie BidirecţionalDocument55 paginiConvertoare Electronice de Putere Cu Transfer de Energie BidirecţionalMarianaÎncă nu există evaluări
- EE - Carte (Badea Nicolae)Document354 paginiEE - Carte (Badea Nicolae)Florin IftodeÎncă nu există evaluări
- Elemente de Inginerie Electrica Indrumar de LaboratorDocument122 paginiElemente de Inginerie Electrica Indrumar de LaboratorThenie Cabron100% (4)
- Electronica de PutereDocument102 paginiElectronica de PutereGeorge Lucian100% (4)
- Actionari Cu Mot de InductieDocument88 paginiActionari Cu Mot de InductieVasi ValiÎncă nu există evaluări
- Electronica Industriala de Putere - Mihai Puiu-Berizintu (2007)Document138 paginiElectronica Industriala de Putere - Mihai Puiu-Berizintu (2007)rtec83100% (1)
- Invertoare PWMDocument19 paginiInvertoare PWMpartenie_mariusÎncă nu există evaluări
- Algoritmi Fuzzy - Circuite Electrice Pentru Implementarea Sistemelor InteligenteDocument48 paginiAlgoritmi Fuzzy - Circuite Electrice Pentru Implementarea Sistemelor InteligentePopa Florin100% (1)
- Proiect de Diplomă Mircea BABADocument75 paginiProiect de Diplomă Mircea BABAbaba_mirceaÎncă nu există evaluări
- III. Modelarea Motoarelor Pas Cu PasDocument28 paginiIII. Modelarea Motoarelor Pas Cu PasAlin RadaÎncă nu există evaluări
- Electronica de Putere ProiectDocument6 paginiElectronica de Putere ProiectIonuț Luca100% (1)
- Electronica de Putere IIDocument67 paginiElectronica de Putere IIVlad Adrian Roman50% (2)
- Actionari Electrice de PutereDocument19 paginiActionari Electrice de PutereesampcÎncă nu există evaluări
- Vida - Referat - Redresor Trifazat in Punte SemicomandataDocument11 paginiVida - Referat - Redresor Trifazat in Punte SemicomandataIonut Cornel VidaÎncă nu există evaluări
- Curs Convertoare StaticeDocument154 paginiCurs Convertoare StaticeRubenAronica100% (2)
- 3desenarea Schemelor Electrice Proficad PDFDocument13 pagini3desenarea Schemelor Electrice Proficad PDFAnonymous Nyjt1dxÎncă nu există evaluări
- ElectronicaindustrialaDocument384 paginiElectronicaindustrialaLa Dame Aux Camélias100% (1)
- Curs FloreaDocument92 paginiCurs FloreaAdrian Constantin0% (1)
- Controlul Unui Motor Stepper, Folosind Un MicrocontrolerDocument46 paginiControlul Unui Motor Stepper, Folosind Un MicrocontrolerPuscas100% (1)
- Reglarea Vitezeu Unui Motor de Curent ContinuuDocument14 paginiReglarea Vitezeu Unui Motor de Curent ContinuuMarius ChircaÎncă nu există evaluări
- Functiile Sistemului SCADADocument21 paginiFunctiile Sistemului SCADAvitilomaxÎncă nu există evaluări
- Despre ScadaDocument16 paginiDespre ScadaCosmin GajuÎncă nu există evaluări
- Convertoare Statice - Curs CSDocument187 paginiConvertoare Statice - Curs CSMihai Leonte75% (4)
- Masini Si Actionari Electrice IIIDocument38 paginiMasini Si Actionari Electrice IIIVasiMacoveiÎncă nu există evaluări
- Curs MAP Mar.2019Document150 paginiCurs MAP Mar.2019Adrian PoponeteÎncă nu există evaluări
- Actionari Electrice Cu Logica CablataDocument10 paginiActionari Electrice Cu Logica CablataTudor Ana-MariaÎncă nu există evaluări
- Teza de Abilitare - Ovidiu - Pop PDFDocument118 paginiTeza de Abilitare - Ovidiu - Pop PDFEdward VarneanuÎncă nu există evaluări
- Cartea Electricianului Din Statii Si PT-uri12Document609 paginiCartea Electricianului Din Statii Si PT-uri12Popescu PaulÎncă nu există evaluări
- Sorin Deaconu Teza Abilitare PDFDocument110 paginiSorin Deaconu Teza Abilitare PDFmaddie2020Încă nu există evaluări
- EP42-31 Transformatoare de Masura-Masurarea Marimilor ElectriceDocument42 paginiEP42-31 Transformatoare de Masura-Masurarea Marimilor Electricecostel nisipasuÎncă nu există evaluări
- Statii Electrice Si Posturi de TransformareDocument357 paginiStatii Electrice Si Posturi de Transformarertec8392% (12)
- Studiul Energetic Al Redresoarelor PWMDocument91 paginiStudiul Energetic Al Redresoarelor PWMAdrian AnghelÎncă nu există evaluări
- Diaconu Laurentiu IonelDocument54 paginiDiaconu Laurentiu IoneljaphlmsÎncă nu există evaluări
- W Curs PtdeeDocument169 paginiW Curs PtdeeCostin AlexandruÎncă nu există evaluări
- Indrumar AE v4 PDFDocument202 paginiIndrumar AE v4 PDFLaurian Ştefan100% (2)
- Indrumar AE v4Document202 paginiIndrumar AE v4Madalin StanciuÎncă nu există evaluări
- Actionari Electrice de CCDocument239 paginiActionari Electrice de CCConstantin Popa67% (3)
- Teza Cosmin Bogdan Dita v4Document192 paginiTeza Cosmin Bogdan Dita v4ionutzdinescuÎncă nu există evaluări
- Masini Electrice I - Masina Asincrona - Curs Si AplicatiiDocument112 paginiMasini Electrice I - Masina Asincrona - Curs Si AplicatiiCata Catalin100% (1)
- Galan Nicolae Masini ElectriceDocument705 paginiGalan Nicolae Masini ElectriceCatalin Pancescu100% (1)
- Actionari Electrice de Curent Continuu PDFDocument240 paginiActionari Electrice de Curent Continuu PDFPaul Lucian VentelÎncă nu există evaluări
- Invertoare PWMDocument97 paginiInvertoare PWMDani MatisÎncă nu există evaluări
- Controlul Motoarelor D.C. Folosind o Placa de Dezvoltare Cu DSPDocument74 paginiControlul Motoarelor D.C. Folosind o Placa de Dezvoltare Cu DSPionutÎncă nu există evaluări
- Carte - Elemente de Executie ElectriceDocument161 paginiCarte - Elemente de Executie ElectriceMarin AndraÎncă nu există evaluări
- Statii Si Posturi de Transformare - Curs 2006Document386 paginiStatii Si Posturi de Transformare - Curs 2006Alina Iordache100% (6)
- Cercetari Magneti PermanentiDocument54 paginiCercetari Magneti PermanentiAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Pdfkitcolectie 300Document43 paginiPdfkitcolectie 300Stefania PavelÎncă nu există evaluări
- Utilizarea Celulelor Fotovoltaice Pentru Alimentarea Panourilor de Semnalizare RutierăDocument99 paginiUtilizarea Celulelor Fotovoltaice Pentru Alimentarea Panourilor de Semnalizare RutierăDragos SarpeÎncă nu există evaluări
- CIRCUITE INTEGRATE ANALOGICE - Indrumator Proiectare PDFDocument94 paginiCIRCUITE INTEGRATE ANALOGICE - Indrumator Proiectare PDFmihai_daneaÎncă nu există evaluări
- Convertoare Electromecanice, Notiuni Teoretice FundamentaleDocument136 paginiConvertoare Electromecanice, Notiuni Teoretice FundamentaleMarius BonceaÎncă nu există evaluări
- Codul RET-RCDDocument166 paginiCodul RET-RCDionecirÎncă nu există evaluări
- Electrotehnica Lucrari de Laborator CD 1Document74 paginiElectrotehnica Lucrari de Laborator CD 1David HalaszÎncă nu există evaluări