Documente Academic
Documente Profesional
Documente Cultură
Cercetari Magneti Permanenti
Încărcat de
Anonymous WO9KSfNJ4aTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Cercetari Magneti Permanenti
Încărcat de
Anonymous WO9KSfNJ4aDrepturi de autor:
Formate disponibile
UNIVERSITATEA TRANSILVANIA DIN BRAOV
FACULTATEA DE INGINERIE ELECTRIC
I TIINA CALCULATOARELOR
ing. LAURENIU-IONEL DIACONU
CERCETRI PRIVIND REGLAREA N LIMITE
LARGI A CUPLULUI I VITEZEI MOTORELOR
SINCRONE CU MAGNEI PERMANENI
A STUDY ON THE CONTROL WITHIN LARGE LIMITS OF
THE TORQUE AND SPEED OF PERMANENT-MAGNET
SYNCHRONOUS MOTORS
= Rezumatul tezei de doctorat =
CONDUCTOR TIINIFIC
Prof. univ. dr. ing. IULIAN OPA
2010
MINISTERUL EDUCAIEI I CERCETRII
UNIVERSITATEA TRANSILVANIA DIN BRAOV
BRAOV, B-dul EROILOR nr. 29, 500036
Tel. 0040-0268-413000, Fax 0040-0268-410525
RECTORAT
COMPONENA
comisiei de doctorat
numit prin Ordinul Rectorului Universitii Transilvania din Braov
nr. 4129 din 25.06.2010
PREEDINTE
Prof. univ. dr. ing. Sorin Aurel MORARU
Decan,
Facultatea de Inginerie Electric i tiina Calculatoarelor
Universitatea Transilvania din Braov
CONDUCTOR TIINIFIC
Prof. univ. dr. ing. Iulian OPA
Universitatea Transilvania din Braov
REFERENI
Prof. univ. dr. ing.,d. h. c. Cornel PANAIT
Universitatea Maritim din Conctana
Prof. univ. dr. ing. Gheorghe BLU
Universitatea Tehnic Gheorghe Asachi din Iai
Prof. univ. dr. ing. Florin MOLDOVEANU
Universitatea Transilvania din Braov
Susinerea public a tezei de doctorat va avea loc n data de 24.09.2010,
ora 11.30, n corpul V al Universitii Transilvania, str. Mihai Viteazu nr. 5,
etajul III, sala V III 9.
V rugm s transmitei eventuale aprecieri sau observaii asupra
coninutului lucrrii pe adresa de email laurentiu.diaconu@unitbv.ro.
PREFA
n domeniul sistemelor de acionare electric cercettorii depun, n
prezent, eforturi pentru obinerea unor performane ct mai ridicate. Dezvoltarea
impetuoas a electronicii de putere, procesoarelor digitale de semnal i
calculatoarelor, pe de o parte, dar i realizarea de maini electrice moderne,
construite cu materiale descoperite recent, cu proprieti deosebite, pe de alt
parte, au fcut ca atenia s fie ndreptat ctre utilizarea mainilor asincrone
(MA), mainilor sincrone cu magnei permaneni (MSMP) i mainilor cu
reluctan n comutaie (MRC).
Cele dou direcii moderne de realizare a acionrilor electrice reglabile
de curent alternativ sunt: reglarea cu orientare dup cmp (Field Oriented Control
FOC) i reglarea direct a cuplului (Direct Torque Control DTC).
Datorit unor avantaje reale, mainile sincrone cu magnei permaneni
constituie o alternativ serioas la utilizarea mainilor asincrone att n
acionrile electrice ct i n sistemele de poziionare (servoacionri).
Aceste maini (MSMP) sunt larg folosite n servoacionri de mic putere
pentru maini-unelte (de exemplu, motoarele axelor, poziionri) n manipula-
toare, aeronautic, roboi i n traciune (automobile electrice i hibride). La puteri
de cca.1MW s-au utilizat i n acionrile de propulsie a navelor. De asemenea,
este posibil s fie folosite la producerea energiei electrice, n aplicaii eoliene, etc.
n prezent, sistemele de reglare cu orientare dup cmp i reglare direct
a cuplului tratate mpreun cu cu reglarea fr senzori i reglarea adaptiv au
nceput s capteze atenia cercettorilor din ara noastr. Din acest punct de
vedere, consider c lucrarea de fa este una de actualitate i aduce contribuii n
domeniul sistemelor de acionare cu maini sincrone cu magnei permaneni.
n ncheiere, in s aduc pe aceast cale, sincere mulumiri domnului
Prof.univ.dr.ing. Iulian OPA, care, n calitate de conductor tiinific al acestei
lucrri, m-a sprijinit i ajutat n mod deosebit. De asemenea, mulumesc colegilor
din Catedra de Automatic i din facultate care m-au ajutat i sprijinit. Voi fi
recunosctor familiei mele care m-a susinut ntotdeauna.
Braov, 2010 ing. Laureniu-Ionel DIACONU
1
CUPRINS
Introducere ...........................................................................................
(4) 4
1. Motoarele sincrone cu magnei permaneni n acionrile
electrice reglabile ........................................................................... (8) 9
1.1. Introducere ................................................................................
(8) 9
1.2. Magnei permaneni utilizai n construcia MSMP ....................
(8) 10
1.3. Consideraii constructive i caracteristicile MSMP ...................
(9) 13
1.4. Comparaie ntre motoarele sincrone cu magnei permaneni
i motoarele asincrone .............................................................. (9) 20
1.5. Concluzii ...................................................................................
(10) 22
2. Teoria i modelarea motorului sincron cu magnei permaneni..
(11) 23
2.1. Regimul staionar al motorului sincron cu magnei permaneni.
(11) 23
2.1.1. Relaii fundamentale .....................................................
(11) 23
2.1.2. Diagrame fazoriale .......................................................
(11) 30
2.1.3. Caracteristici .................................................................
(13) 34
2.2. Regimul nestaionar (dinamic) al motorului sincron cu magnei
permaneni ............................................................................... (14) 36
2.2.1. Ipoteze simplificatoare ..................................................
(14) 36
2.2.2. Ecuaiile MSMP n sistem trifazat statoric ....................
(15) 37
2.2.3. Ecuaiile MSMP n sistem bifazat rotoric orientat dup
fluxul magnetic .............................................................. (15) 42
2.2.4. Ecuaiile de stare ..........................................................
(15) 43
2.3. Concluzii ...................................................................................
(16) 45
3. Comanda convertoarelor de putere ...............................................
(17) 46
3.1. Introducere ...............................................................................
(17) 46
3.2. Convertoare cu circuit intermediar de curent continuu i
invertoare PWM ....................................................................... (17) 46
3.3. Invertoare PWM comandate n curent .....................................
(17) 49
3.3.1. Regulatoare PWM cu histerezis ...................................
(18) 50
3.3.2. Regulatoare PWM cu comparator ramp .....................
(19) 55
3.4. Invertoare PWM comandate n tensiune ..................................
(19) 56
3.4.1. Generarea vectorilor spaiali de tensiune .....................
(19) 56
3.4.2. Generarea secvenei de comutare a invertorului ..........
(21) 59
3.5. Decuplarea de curent ...............................................................
(22) 64
3.6. Compensarea tensiunilor de comand ....................................
(23) 67
3.7. Bucla de reglare a vitezei .........................................................
(24) 69
3.8. Concluzii ..................................................................................
(24) 71
2
4. Reglarea n limite largi a cuplului i vitezei motorului sincron
cu magnei permaneni interiori .................................................... (25) 72
4.1. Introducere ...............................................................................
(25) 72
4.2. Reglarea n limite largi a MSMPI .............................................
(25) 74
4.2.1. Implementarea n regiunea de cuplu constant .............
(26) 74
4.2.2. Implementarea n regiunea de putere constant ..........
(28) 77
4.3. Tranziia regimurilor de funcionare .........................................
(29) 80
4.4. Implementarea sistemului complet de reglare combinat a
MSMPI i rezultatele simulrii .................................................. (29) 81
4.5. Concluzii ..................................................................................
(30) 85
5. Reglarea fr senzori a motorului sincron cu magnei
permaneni interiori bazat pe filtru Kalman extins .................... (30) 86
5.1. Introducere ...............................................................................
(30) 86
5.2. Tehnica filtrrii Kalman ............................................................
(30) 88
5.2.1. Estimarea optimal .......................................................
(31) 88
5.2.2. filtrul Kalman liniar, discret n timp ................................
(31) 89
5.2.3. Filtrul Kalman liniarizat .................................................
(31) 92
5.2.4. Filtru Kalman extins ......................................................
(31) 95
5.3. Aplicarea FKE pentru o acionare cu MSMPI fr senzori .......
(32) 96
5.3.1. Selecia modelului mainii n domeniul timp .................
(32) 97
5.3.2. Modelul discret al MSMP n spaiul strilor ...................
(32) 98
5.3.3. Determinarea zgomotului i a matricilor de covarian
Q, R, P .......................................................................... 99
5.3.4. Implementarea algoritmului FKE discretizat; acordarea
filtrului ........................................................................... (32) 100
5.4. Modelarea sistemului complet de reglare a MSMPI fr
senzori ...................................................................................... (33) 110
5.5. Rezultatele simulrilor ..............................................................
(34) 111
5.5.1. Rezultatele simulrii n condiiile cunoaterii
parametrilor acionrii i a condiiilor iniiale ................. 111
5.5.2. Importana cunoaterii parametrilor acionrii i a
condiiilor iniiale ........................................................... 121
5.6. Concluzii ..................................................................................
(34) 125
6. Reglarea adaptiv a motorului cu magnei permaneni interiori.
(34) 126
6.1. Introducere ...............................................................................
(34) 126
6.2. Modele pentru identificarea parametrilor .................................
(34) 127
6.2.1. Modele parametrice ......................................................
127
6.2.2. Modele de regresie (modelul ARMA) ...........................
128
6.3. Estimarea prin metoda celor mai mici ptrate ..........................
(35) 129
3
6.3.1. Principiul metodei .........................................................
(35) 129
6.3.2. Estimarea recursiv prin metoda celor mai mici ptrate
(35) 130
6.3.3. Parametri variabili n timp .............................................
(35) 132
6.4. Reglarea adaptiv a MSMPI ....................................................
(35) 133
6.4.1. Specificaiile de proiectare a regulatorului adaptiv .......
(35) 133
6.4.2. Algoritmul de estimare a parametrilor ...........................
(36) 135
6.5. Implementarea strategiei de reglare adaptiv i estimarea
parametrilor .............................................................................. (36) 139
6.5.1. Descrierea general a modelului ..................................
(36) 139
6.5.2. Generatorul de stare (State Generator) ........................
139
6.5.3. Estimatorul parametrilor (Parameter estimator)
140
6.5.4. Proiectarea blocului de plasare a polilor (Pole
Placement Controller Design) ....................................... 142
6.5.5. Regulatorul adaptiv .......................................................
(37) 145
6.6. Rezultatele simulrii ................................................................
(37) 145
6.6.1. Funcionarea n gol ......................................................
145
6.6.2. Funcionarea in sarcin ................................................
147
6.7. Excitaia persistent .................................................................
(37) 148
6.8. Concluzii ..................................................................................
(37) 149
7. Reglarea direct a cuplului motoarelor sincrone cu magnei
permaneni ..................................................................................... (38) 151
7.1. Introducere ...............................................................................
(38) 151
7.2. Bazele fizice i matematice ale producerii rspunsului rapid al
cuplului ..................................................................................... (38) 151
7.3. Reglarea direct a cuplului MSMP alimentat de la VSI ...........
(40) 162
7.3.1. Reglarea direct a cuplului electromagnetic i fluxului
statoric folosind tabelul de comutaie optim a tensiunii (40) 162
7.3.2. Reglarea direct a cuplului electromagnetic i
curentului statoric n axa folosind tabelul de
comutaie optim a tensiunii .........................................
d
170
7.3.3. Reglarea direct a cuplului folosind un algoritm
predictiv pentru selectarea vectorului de comutaie a
tensiunii ......................................................................... (42) 172
7.4. Concluzii ..................................................................................
(42) 174
8. Rezultate experimentale .................................................................
(42) 175
Concluzii finale ....................................................................................
(44) 181
Bibliografie ...........................................................................................
(46) 183
4
INTRODUCERE
n prezent, pe plan mondial, atenia cercettorilor este focalizat n special pe
mbuntirea performanelor sistemelor de acionare electric utiliznd maini
asincrone (MA), maini sincrone cu magnei permaneni (MSMP) i maini cu
reluctan n comutaie (MRC). n ceea ce privete teoria reglrii acestora se disting:
reglarea cu orientare dup cmp sau reglarea vectorial (Field Oriented Control -
FOC) i reglarea direct a cuplului (Direct Torque Control - DTC).
Conceptele de reglare se bazeaz pe teoria fazorilor spaiali. n reglarea cu
orientare dup cmp prin introducerea fazorilor spaiali maina trifazat de c.a.
real este echivalat cu o main bifazat de c.c. la care, pentru a se obine cuplul
maxim, sistemul bifazat comun (la care sunt raportate att fenomenele din stator ct
i cele din rotor) se orienteaz, cu axa real, dup fazorul spaial al unui flux
(statoric, rotoric sau din ntrefier). n cazul reglrii directe a cuplului, abaterile (erorile)
dintre valorile impuse (de referin) i valorile reale (estimate) ale fluxului i cuplului
se folosesc pentru reglarea direct a strilor invertorului de alimentare a mainii,
pentru a menine abaterile n intervalul unor benzi de histerezis fixate ale fluxului
respectiv cuplului.
n lucrare se trateaz reglarea cu orientare dup cmp a motorului sincron cu
magnei permaneni interiori (MSMPI), reglarea fr senzori electromecanici bazat
pe filtrul Kalman extins (FKE), reglarea adaptiv cu autoacordare i estimarea
parametrilor precum i reglarea direct a cuplului (mai puin tratat n literatura
tehnic de specialitate din ara noastr).
Sunt prezentate strategiile de reglare, modelele SIMULINK, rezultatele
simulrilor, rezultatele experimentale, se comenteaz aceste rezultate i se
contureaz noi domenii de continuare a cercetrilor.
n capitolul 1 se prezint ntr-o form inedit principalele caracteristici ale
magneilor permaneni utilizai n construcia MSMP, configuraiile rotorice i se pun
n eviden caracteristicile acestor maini n vederea folosirii lor ntr-un sistem de
acionare electric. Se realizeaz o comparaie ntre MSMP i MA lund n
consideraie numai cracteristicile mainii (vitez, factor de putere, caracteristica
cuplu-vitez, ntrefier i de cost) i o alt comparaie privind ntregul sistem de
acionare, care confer un avantaj real acionrii cu MSMP.
Capitolul 2 trateaz pe larg i ntr-o form unitar, teoria i modelarea
MSMP n cazul regimului staionar i nestaionar. Sunt prezentate ntr-o form uor
de neles, relaiile fundamentale ale regimului staionar, diagramele fazoriale i
caracteristicile MSMP. Tratarea regimului nestaionar cuprinde ecuaiile MSMP n
sistemul trifazat statoric, ecuaia de tensiune, inductanele motorului, fluxurile
nlnuite, ecuaia mecanic, etc. Regimul nestaionar tratat n sistemul bifazat rotoric
cuprinde: ecuaia fazorial de tensiune, fluxurile nlnuite, inductanele i expresia
cuplului electromagnetic. Pe baza ecuaiilor de stare se ntocmete modelul
SIMULINK al motorului sincron cu magnei permaneni interiori (MSMPI), model care
se va utiliza n sistemele de reglare prezentate n continuare.
Capitolul 3 un capitol important al lucrrii trateaz comanda
convertoarelor statice de putere utilizate pentru alimentarea MSMP din sistemele de
acionare electric. Dup tratarea succint a convertorului cu circuit intermediar de
5
c.c. i a principiului de funcionare a invertorului PWM se prezint pe larg invertoarele
PWM comandate n curent i invertoarele PWM comandate n tensiune.
Invertoarele PWM comandate n curent, care opereaz cu frcvene de
comutaie de ordinul KHz-ilor, pot funciona ca surse reglabile de curent avnd un
rspuns dinamic bun i un coninut armonic redus.
Pentru comanda acestora se utilizez: regulatoare PWM cu histerezis (cele
mai folosite) i regulatoare PWM cu comparator cu semnal ramp. Regulatoarele
PWM cu histerezis sunt explicate detaliat, ntr-o form original, deoarece se vor
utiliza n schemele de reglare tratate n continuare i se insist pe analiza posibilelor
cicluri limit de frecven ridicat.
n cazul invertoarelor comandate n tensiune curenii sunt reglai n buclele
de cuplu sau de vitez i nu se impune o condiie ca s rmn sinusoidali.
Generarea vectorilor spaiali de tensiune este analizat n detaliu pentru a genera
secvena de comutaie a invertorului pe baza modulrii PWM simetrice. Pentru a
anula efectele de intercuplare a curenilor, n ecuaiile de tensiune ale componentelor
dup cele dou axe, se propune o compensare anticipativ, n urma creia ecuaia
rezultant a sistemului se reduce la un integrator (n fiecare din cele dou axe) ceea
ce constituie o dinamic mult mai uoar pentru bucla de curent. Pentru aceasta se
prezint algoritmul original de decuplare a curentului i implementarea SIMULINK.
Compensatorul tensiunilor de comand propus este un algoritm soft (v. schema
logic din fig. 3.23) care alege valorile optime pentru tensiunile de referin impuse n
cele dou axe i astfel nct componenta a curentului s poat fi reglat
preferenial fa de .
sd
u
sq
u
sd
i
sq
i
Reglarea n limite largi a cuplului i vitezei MSMPI, dezvoltat n capitolul
4, este necesar, n special, n traciunea electric i la vehiculele comandate de la
distan, care necesit cupluri mari la viteze reduse i cupluri mici la viteze mari. Aa-
numita reglare combinat de la mainile de c.c. se poate aplica i n cazul mainilor
de c.a. cu aceleai limitri privind cerinele de cuplu. n cazul mainilor cu magnei
permaneni, slbirea cmpului se realizeaz prin alocarea unei valori negative
componentei longitudinale a curentului statoric, care va produce un flux de reacie
opus fluxului magnetului permanent.
sd
i
Sub viteza de baz (nominal), n regiunea de cuplu constant,
amplitudinea vectorului de curent statoric nu trebuie s depeasc valoarea sa
limit I
sm
, ceea ce nseamn c componentele i ale curentului statoric, n
planul d-q, trebuie s fie totdeauna n interiorul cercului de curent limit. Pentru a
avea un cuplu maxim/amper se arat c vrful vectorului de curent statoric trebuie
s se afle pe o hiperbol echilater de cuplu constant. n acest regim, datorit t.e.m.
de valori reduse exist suficiente resurse de tensiune n invertor, pentru ca locul
geometric al limitei de tensiune a invertorului (elipsa limit) s nconjoare cercul de
curent limit.
sd
i
sq
i
n regiunea de putere constant, cnd tensiunile aplicate motorului se
apropie de tensiunea maxim a invertorului, are loc saturaia regulatoarelor de curent
ale invertorului PWM comandat n curent. n aceast situaie, considernd
componentele curentului n regim staionar, corespunztor tensiunii statorice
maxime, se demonstreaz c locul geometric al fazorului de curent statoric este o
6
elips limit de tensiune. Fazorul curentului statoric trebuie s se afle n interiorul
elipsei.
Pe baza implementrii sistemului complet de reglare i a rezultatelor
simulrilor sunt validate concluziile teoretice cu respectarea limitrilor impuse.
Deoarece sistemul implementat conine senzori electromecanici de vitez i poziie
se impun msuri de eliminare a acestora ceea ce va constitui subiectul capitolului
urmtor.
n capitolul 5 se elaboreaz i testeaz un sistem de reglare n limite largi a
MSMPI fr senzori electromecanici bazat pe filtrul Kalman extins (FKE).
Filtrele Kalman intervin att pentru estimarea mrimilor de stare
nemsurabile ct i pentru filtrarea valorilor msurate care au fost puternic perturbate
(de unde i denumirea de filtru Kalman). Astfel, se iau n consideraie toate sursele
de erori care acioneaz asupra sistemului i care sunt (v. fig. 5.1):
zgomotul procesului dat de:
- perturbaiile din sistem;
- descrierea matematic aproximativ a modelului;
zgomotul introdus de senzorii de curent i efectele de cuantizare din
convertoarele A/D.
Tehnica filtrrii Kalman, care este prezentat detaliat i logic, se aplic apoi
pentru o acionare cu MSMPI fr senzori pe baza unui algoritm care conine:
selecia modelului mainii n domeniul timp;
discretizarea modelului mainii;
determinarea zgomotului i a matricelor de covarian a strii Q, R, P;
implementarea algoritmului FKE discretizat; acordarea.
Se evideniaz n aceast parte (ca o contribuie original) introducerea de
ctre autor a unei stri suplimentare i anume cuplul de sarcin, ceea ce conduce la
un sistem de ordinul cinci i care contribuie la o mbuntire considerabil a
estimrii comportrii mecanice a sistemului.
Algoritmul Kalman este proiectat ca o funcie Matlab obinuit (M-function)
care returneaz la fiecare perioad de eantionare vectorul de curent al estimrilor
de stare i matricea de covarian P. S-a considerat, ca i n capitolul precedent,
reglarea n limite largi a cuplului i vitezei (sub i peste viteza nominal).
Prin numeroasele simulri efectuate (v. fig. 5.13 5.24) n diverse regimuri
tranzitorii s-a demonstrat capacitatea FKE de a estima corect strile sistemului i de
a furniza mrimile de reacie pentru regulatoarele de vitez i curent. Trebuie
observat totui c filtrul Kalman prezint o mare sensibilitate la variaia parametrilor
motorului.
Capitolul 6 prezint reglarea adaptiv i estimarea parametrilor MSMPI. n
reglarea adaptiv cnd exist perturbaii i modelele nu sunt complet cunoscute
reglarea on-line este combinat cu estimarea on-line a parametrilor. De fapt,
estimarea parametrilor formeaz o parte integrant a oricrei scheme adaptive. Din
7
aceast cauz proiectarea regulatorului adaptiv va necesita elaborarea unui bloc de
estimare a parametrilor motorului considerat.
Parametri estimai (momentul de inerie J, coeficientul de frecare vscoas B,
fluxul magnetului , diferena inductanelor n cele dou axe L
f
d
-
L
q
) s-au ales
inndu-se seama de observaiile din capitolele precedente referitoare la importana
cunoaterii cu precizie a parametrilor mecanici ai acionrii (v. ec. 2.80). n acest
scop se prezint mai nti modelele pentru identificarea parametrilor (modelele
parametrice i de regresie ARMA). Modelul continuu n timp al ecuaiei de micare
(v. ec. 6.29) pentru MSMPI se discretizeaz i se asociaz cu un model ARMA cu
eliminare exponenial. Acest algoritm elaborat de autor a fost apoi implementat n
SIMULINK ntr-o schem de reglare adaptiv. n acest scop s-a elaborat funcia S-
function n MATLAB, care simuleaz funcionarea sistemului digital de calcul pentru
estimarea parametrilor.
Sistemul de reglare adaptiv s-a realizat innd seama de sistemul de reglare
n limite largi (v. cap.4) n care regulatorul de vitez PI s-a nlocuit cu un regulator
adaptiv care permite meninerea polilor sistemului nchis n locaiile stabilite i
condiiile existenei cuplului de sarcin la arbore.
Rezultatele simulrii (n gol i n sarcin) dovedesc estimarea corect a
parametrilor n timpul funcionrii staionare iar performanele reglrii adaptive sunt
superioare oricrui tip de reglare (rspuns n vitez foarte rapid, fr suprareglaj i
estimare precis a parametrilor cu o eroare de cca. 1%). O observaie important se
refer la faptul c att timp ct nu se aplic la arbore un cuplu de sarcin, fluxul
magnetului permanent nu poate fi determinat. Estimrile sunt corecte numai
cnd s-a trecut testul excitaiei persistente i componentele curentului n axele d i q
au completat cel puin o form de und dreptunghiular. Fr testele de validare
estimarea incorect a parametrilor este trecut regulatorului de vitez, iar estimarea
incorect poate conduce la o reglare instabil.
f
n capitolul 7 se trateaz reglarea direct a cuplului a MSMP. ntr-o
asemenea acionare fluxul nlnuit (de exemplu, fluxul statoric) i cuplul
electromagnetic se regleaz direct i independent prin selecia modului de comutaie
optim a invertorului care alimenteaz motorul. Selecia se realizeaz astfel nct s
se restricioneze erorile fluxului i cuplului n interiorul unor benzi de histerezis de flux
i respectiv de cuplu, la frecven redus de comutaie a invertorului i pierderi
armonice reduse.
Sunt prezentate bazele fizice i matematice ale producerii rspunsului rapid
al cuplului. Pentru reglarea direct a cuplului MSMP alimentat de la VSI se
analizeaz n detaliu: reglarea nepredictiv a cuplului electromagnetic i fluxului
statoric folosind un tabel de comutaie optim a tensiunii, reglarea direct a cuplului
i curentului statoric n axa d i reglarea direct a cuplului folosind un algoritm
predictiv.
Se prezint n detaliu schemele de reglare corespunztoare, estimarea
fluxului statoric nlnuit, estimarea cuplului electromagnetic i generarea fluxului
statoric de referin (impus) aplicnd criteriile de cuplu maxim/unitate de curent i
cuplu maxim/unitate de flux, corespunztoare reglrii n limite largi a cuplului i
vitezei MSMPI. Pentru fiecare schem analizat am dedus tabelul de comutaie
optim a tensiunii.
8
Rezultatele experimentale din capitolul 8 confirm rezultatele teoretice
tratate n lucrare privind reglarea n limite largi a cuplului i vitezei MSMPI.
Se prezint rezultatele experimentale privind pornirea pn la o vitez
impus situat peste viteza nominal, rspunsul n curent, variaiile mrimilor
caracteristice n timpul procesului de reversare, traiectoria vectorului de curent
statoric, variaia curentului de faz statoric n timpul reversrii etc. i se trag concluzii
privind influena frecvenei de eantionare i a limitei inferioare a acesteia.
CAPITOLUL 1
MOTOARELE SINCRONE CU MAGNEI PERMANENI N
ACIONRILE ELECTRICE REGLABILE
1.1. Introducere
n prezent, atenia cercettorilor este focalizat n special asupra
mbuntirii performanelor sistemelor de acionare electric cu maini asincrone,
maini sincrone cu magnei permaneni i maini cu reluctan n comutaie.
1.2. Magnei permaneni utilizai n construcia MSMP
Magneii permaneni utilizai n construcia mainilor electrice se pot mpri
n urmtoarele grupe, corespunztor proprietilor de material [39].
(b) (a)
Fig. 1.3. (a) Curbele (BH)
max
pentru diferii magnei;
(b) Caracteristici magnetice de material.
9
1.3. Consideraii constructive i caracteristicile MSMP
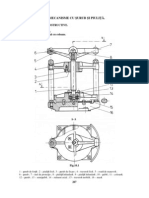
MSMP sunt, de obicei, construite folosindu-se una dintre urmatoarele
configuraii rotorice:
- clasic (rotor Merrill), cu poli apareni, piese polare laminate cu
nfurare colivie (v. fig. 1.4 a) ;
- rotor cu magnei interiori (v. fig. 1.4 b,i,j);
- rotor cu magnei pe suprafat (v. fig. 1.4 c,g,h);
- rotor cu magnei inserai; (v. fig. 1.4 d);
- rotor cu magnei ngropai simetric distribuii (v. fig. 1.4 e);
- rotor cu magnei ngropai asimetric distribuii (v.fig. 1.4 f).
Analiza caracteristicilor MSMP pentru includerea lor ntr-un sistem de reglare
trebuie s cuprind urmtoarele criterii:
- cost;
- densitate de putere;
- raport cuplu curent;
- gama de vitez;
- cupluri armonice electrice i de poziie;
- alegerea traductoarelor pentru bucla de reglare.
1.4. Comparaie ntre motoarele sincrone cu magnei permaneni i
motoarele asincrone
Tabelul 1.1. Comparaie ntre motoarele sincrone cu MP i motoarele asincrone
Mrimea
Motor sincron cu
magnei permaneni
Motor asincron
Vitez Constant,
independent de sarcin
La creterea sarcinii
viteza scade uor
Factor de putere (fp)
cos
Fp reglabil n motoarele
excitate electromagnetic.
Este posibil funci-
onarea la fp=1
Nu este posibil
schimbarea fp (exceptnd
motoarele alimentate de
la invertor)
fp 0,8 ... 0,9 la sarcina
nominal
fp 0,1 la mersul n gol
ntrefier neferomagnetic Mare, de la o fraciune
de mm la civa centi-
metri
Mic, de la o fraciune de
mm la max. 3mm
Caracteristica
cuplu-tensiune
Cuplul direct propor-
ional cu tensiunea de
alimentare. Pornire mai
bun dect cea a unui
motor asincron
Cuplul direct propor-
ional cu ptratul tensiunii
de alimentare
Pre Main scump Cost disponibil al
mainii
10
Un ntrefier mai mare al motoarelor sincrone le face mai sigure dect
motoarele asincrone. ntrefierul crescut este necesar pentru a minimiza efectul
reaciei nfurrii statorice, pentru a reduce reactana sincron (dac este necesar)
i a mbunti stabilitatea.
Tabelul 1.2. Pierderile de putere i randamentul acionrilor cu un motor sincron cu MP respectiv cu
motor asincron n scurtcircuit la valorile nominale de 50kW, 6000rot/min i 200Hz
Pierderi
Motor
sincron cu
MP
Motor
asincron n
scurtcircuit
Pierderi n nfurri
nfurarea statoric 820W
nfurarea rotoric -
} 1198W
Amortizor 90W -
Pierderile datorate efectului pelicular n nfurarea
statoric
30W
Pierderile datorate efectului pelicular n nfurarea
rotoric
-
710W
Pierderi n miez 845W 773W
Pierderi datorate armonicelor superioare
Amortizor 425W -
Suprafaa rotorului - 221W
Pulsaia fluxului - 301W
Pierderi mecanice
Frecri n lagre 295W
Ventilaie 70W
} 580W
Total pierderi n motor 2575W 3783W
Total pierderi n invertor 537W 1700W
Total pierderi n acionare 3112W 5483W
Randamentul
Motor 95,1% 93,0%
Sistem de acionare electromecanic 94,1% 90,1%
Pierderile totale de putere ale acionrii cu motor sincron cu MP se reduc cu
43% comparativ cu cele ale acionrii cu motor asincron. Astfel, randamentul a fost
crescut de la 90,1 la 94,1, cu 4% (2kW putere economisit) [2].
1.5. Concluzii
Mainile sincrone cu magnei permaneni reprezint o alternativ important
la utilizarea mainilor asincrone n sistemele de acionri electrice de medie i mare
vitez. MSMP se utilizeaz n acionarea mainilor-unelte, a perifericelor de
calculatoare, n aparatura medical, roboi, traciune electric, producerea energiei
electrice, propulsarea navelor, aplicaii eoliene etc. Utilizarea acestor maini este n
special datorat urmtoarelor caracteristici principale:
inerie mic, din cauza absenei coliviei rotorice i deci un rspuns
rapid n cuplu;
pierderi neglijabile n rotor;
cuplu cu coninut de armonici redus;
11
rcire mai uoar (pierderi concentrate n stator)
ntr-o form inedit se evideniaz importana alegerii: materialelor
magnetice; configuraiei rotorului i caracteristicilor mainii. Comparaia dintre MSMP
i MA, lund n considerare nu numai caracteristicile mainii dar i ntregul sistem de
acionare, arat o cretere de cca. 4% a randamentului n favoarea MSMP.
CAPITOLUL 2
TEORIA I MODELAREA
MOTORULUI SINCRON CU MAGNEI PERMANENI
2.1. Regimul staionar al motorului sincron cu magnei permaneni
2.1.1. Relaii fundamentale
Sunt prezentate i explicate la acest paragraf relaiile fundamentale n regim
staionar pentru:
turaie;
inducie magnetic n ntrefier;
tensiunea electromotoare (t.e.m.);
densitatea curentului statoric;
puterea electromagnetic;
reactana sincron;
reactana sincron subtranzitorie;
reactana sincron tranzitorie;
cuplul electromagnetic dezvoltat;
factorul de form a cmpului de excitaie;
factorii de form ai reaciei statorice;
tensiunea magnetomotoare echivalent (t.m.m.);
reactana de reacie a statorului.
2.1.2. Diagrame fazoriale
Cnd se traseaz diagramele fazoriale ale mainilor sincrone se folosesc
dou sisteme de fazori :
a) convenia de semne de la generator, adic:
12
( ) ( )
sq aq sd ad
sq aq sd ad a f
jX R I jX R I U
X jI X jI R I U E
+ + + +
= + + + =
1 1 1
1 1
(2.34)
b) convenia de semne de la receptor, adic:
( ) (
sq aq sd ad f
sq aq sd ad a f
jX R I jX R I E
X jI X jI R I E U
+ + + + )
= + + + =
1 1
1 1
(2.35)
E
f
jI
ad
(X
sd
-X
sq
)
jI
a
X
sq
jI
a
X
sd
)
jI
ad
X
sd
)
jI
aq
X
sq
)
U
1
I
a
R
1
q
d
I
aq
I
ad
I
a
R
1
=-
U
1
jI
aq
X
aq
jI
ad
X
ad
E
i
jI
a
X
1
I
ad
I
aq
i
I
a
d
q
E
f
jI
aq
X
sq
jI
a
X
sa
jI
ad
X
sd
I
ad
jI
a
X
sd
I
aq
I
a
E
f
jI
ad
(X
sd
-X
sq
)
I
a
R
1
q
d
U
1
I
ad
I
a
d
I
aq
jI
a
X
1
jI
aq
X
aq
E
i
I
a
R
1
jI
ad
X
ad
=+
E
f
U
1
(b)
(a)
q
Fig. 2.3. Diagrame de fazori ale motorului sincron cu poli proieminenti pentru convenia de
semne de la receptor: (a)-motor subexcitat, (b)-motor supraexcitat
13
2.1.3. Caracteristici
jI
aq
X
sq
jI
ad
X
ad
I
a
R
1
I
ad
R
1
jI
ad
X
sd
jI
aq
X
1
E
i
jI
aq
X
aq
E
f
I
aq
R
1
U
1
U
1
sin
I
ad
X
sd
I
aq
I
ad
I
a
d
U
1
cos
q
U
1
I
a
cos
I
ad
I
aq
d
I
ad
sin
I
ad
sin
I
a
I
aq
cos
(a)
Fig. 2.4. Diagrame fazoriale pentru determinarea: (a) - axelor curentilor si ;
ad
I
aq
I
(b) - puterea de intrare la functionarea la , si
in
P
ad
I
aq
I .
(b)
q
U
1
Fig. 2.5. Caracteristicile n gol ale unui motor sincron cu MP : ( )
1
U f I
a
= , ( )
1
U f P
in
= i
( )
1
cos U f =
14
Fig. 2.6. Caracteristicile de performan ale unui motor sincron cu MP: Curentul statoric ,
cuplul la arbore transmis , puterea de intrare , factorul de putere
a
I
sh
M
in
P cos i
randamentul n funcie de , unde este puterea nominal de ieire.
isN is
P P /
isN
P
2.2. Regimul nestaionar (dinamic) al motorului sincron cu magnei
permaneni
2.2.1. Ipoteze simplificatoare
Modelele dinamice sunt preferate celor staionare deoarece motorul se
presupune a fi inclus ntr-o schem de reglare care trebuie s ia n considerare
regimurile tranzitorii.
Pentru modelele dinamice se iau n considerare urmtoarele ipoteze
simplificatoare:
fluxul din ntrefier este sinusoidal distribuit i orientat pe direcie
radial, att datorit nfurrilor statorice ct i magneilor
permaneni din rotor;
materialul magnetic permanent are o curb liniar de demagnetizare,
independent de temperatur;
saturaia magnetic n ntrefier este neglijat i pierderile din fier,
datorate curenilor de histerezis i celor turbionari, sunt neglijate;
rezistenele i inductanele sunt independente de temperatur i
frecven;
ntrefier uniform i structur magnetic uniform.
15
Fig. 2.7. Seciune prin MSMP cu doi poli
2.2.2. Ecuaiile MSMP n sistem trifazat statoric
Sunt cuprinse: ecuaiile de tensiune; inductanele motorului; fluxurile
nlnuite; ecuaiile matriceale ale modelului electric; ecuaia de micare.
2.2.3. Ecuaiile MSMP n sistem bifazat rotoric orientat dup fluxul magnetic
Sunt cuprinse; ecuaia fazorial de tensiune; fluxurile nlnuite; inductanele;
expresia cuplului electromagnetic.
2.2.4. Ecuaiile de stare
Pentru a reprezenta n spaiul strilor trebuie s rescriem ecuaiile n
derivatele temporale ale mrimilor de stare:
(
sd sq q sd s
d
sd
u i L i r
L dt
di
+ + =
1
) (2.78)
(
sq f sd d sq s
q
sq
u i L i r
L dt
di
+ =
1
) (2.79)
( ) [ ]
J
B
m i i L L i p
J
p
dt
d
s sq sd q d sq f
+ =
2
3 1
(2.80)
=
dt
d
(2.81)
16
Modelul SIMULINK este prezentat n figura 2.9.
L
q
1/s
-
-
+
s d
r s L +
1
s q
r s L +
1
a-b
to
d-q
+
+
L
d
-K-
-K-
-K-
1
s
u
3
s
u
d-q
to
a-b
i
s
5
i
s
6
Subsystem 2
Subsystem 1
4
r
omega_r1
+
+
p
B Js +
1
Ecuaia de
micare
m
em
7
m
s
2
+
-
-K-
3p(L
d
-L
q
)/2
isd
i
sd
isd
1
isq
i
sq
isq
2
p
f
Fig. 2.9. Modelul SIMULINK pentru motorul sincron cu magnei permaneni interiori (MSMPI).
2.3. Concluzii
Teoria i modelarea motorului sincron cu magnei permaneni aprofundeaz
regimul staionar i regimul nestaionar (dinamic).
Regimul staionar al MSMP cuprinde relaiile fundamentale specifice ale
mainii, diagramele fazoriale i caracteristicile mainii.
Regimul nestaionar utilizat n sistemele de reglare generale ale acionrilor
electrice trateaz, ntr-o manier original, ecuaiile fazoriale n sistemul trifazat
statoric, ecuaiile fazoriale n sistem bifazat rotoric orientat dup fluxul magnetului
permanent i ecuaiile de stare. Pe aceste baze s-a realizat modelul SIMULINK al
(MSMPI), model care se va utiliza n schemele de reglare i n simulrile ulterioare.
17
CAPITOLUL 3
COMANDA CONVERTOARELOR DE PUTERE
3.1. Introducere
ntr-o acionare electric convertorul de putere funcioneaz ca un
amplificator de putere, reproducnd semnalele de reglare de nivel de putere redus,
generate de regulatoarele sistemului de reglare, n semnale de nivel de putere
corespunztor pentru maina electric.
3.2. Convertoare cu circuit intermediar de curent continuu i invertoare
PWM
O posibilitate de a transforma frecvena f a reelei n frecven variabil f
1
este aceea de a utiliza dou trepte de transformare i anume:
energia de curent alternativ de tensiune i frecven constante se
transform n energie de curent continuu prin intermediul unui
redresor cu funcionare n dou sau patru cadrane;
energia de curent continuu din circuitul intermediar se transform n
energie de curent alternativ de tensiune i frecven variabile folosind
un invertor static.
3.3. Invertoare PWM comandate n curent
PWM
b
u
a
u
c
u
( ) t i
a
( ) t i
c
( ) t i
b
a
i
c
i
b
i
Regulator
de curent
Fig. 3.4. Schema-bloc general a sistemului PWM cu reglarea curentului pentru a produce o
surs trifazat reglabil de curent.
Un invertor PWM comandat n curent, opernd cu frecvene de comutaie n
domeniul kHz-ilor, poate funciona ca surs reglabil de curent avnd un rspuns
dinamic bun i un coninut armonic redus.
18
3.3.1. Regulatoare PWM cu histerezis
Cel mai simplu tip de regulator de curent PWM este regulatorul cu histerezis.
Conceptul de baz al acestui tip de regulator este ilustrat n figura 3.5.
Linia punctat din fig. 3.8 reprezint un ciclu limit cnd t.c.e.m. nu este zero.
a
i
h
Circiut de
memorare
-A
a
i
+A
-A
-B
+B
-C
+C
u
1
u
8
Fig. 3.7. Traiectoria curentului regulatorului cu histerezis care are drept rezultat eroarea egal
cu dublul benzii de histerezis.
Fig. 3.5. Regulator de curent cu histerezis pentru o singur faz.
+A
+A
-A
-B
+B
-C
+C
u
1
u
6
u
5
Fig. 3.8. Traiectoria reglrii cu histerezis ilustrnd posibile cicluri limit de frecven ridicat.
19
Ciclul limit va putea fi ocazional ntrerupt prin apariia intermitent a
vectorului de tensiune zero (
7
u sau
8
u ). Un vector de tensiune zero se produce
cnd una dintre liniile de comutaie este srit ca rezultat al survenirii t.c.e.m. sau
rezistenei, sau prin micarea diagramei de comutaie cauzat de schimbri ale
referinei de curent. Aplicarea unui vector de tensiune zero va reduce mult frecvena
de comutaie a invertorului cnd t.c.e.m. este redus deoarece viteza de-a lungul
unei traiectorii este proporional cu tensiunea total e u .
3.3.2. Regulatoare PWM cu comparator ramp
Figura 3.10 ilustreaz conceptul de baz care este fundamental n folosirea
unui semnal PWM triunghiular sincron cu eroarea de curent furnizat intrrii
sinusoidale.
3.4. Invertoare PWM comandate n tensiune
Schema-bloc de principiu a comenzii n tensiune a invertoarelor PWM este
reprezentat n figura 3.11.
3.4.1. Generarea vectorilor spaiali de tensiune
Considerm, conform figurii 3.13 sensul potenialelor bornelor a, b, c ale
sarcinii (mainii trifazate) pentru fiecare interval de comutaie. n intervalul 0 60
0
el.
trebuie ca: U
a
= + E; U
b
= - E i U
c
= - E i deci trebuie s fie n conducie tranzistoarele
sa
i
Comparator
G
c
(s)
Generator
triunghiular
Circiut de
memorare
+A
sa
i
-A
Fig. 3.10. Regulator cu comparator ramp pentru o faz.
Regulator
de curent
Modulator al
vectorului de
tensiune
Matrice de
rotaie 3-2
1 s
i
2 s
i
3 s
i
sd
i
sq
i
sq
i
sd
i
sd
u
sq
u
Semnale de
comand pe
poart
Fig. 3.11. Schema-bloc de principiu a comenzii n tensiune a invertoarelor PWM.
20
T
1
, T
6
i T
2
. Convenim s marcm prin 1 starea de conducie a unui dispozitiv din
jumtatea superioar a ramurei corespunztoare fazei respective i prin 0 starea de
conducie a unui dispozitiv din jumtatea inferioar.
u
a
u
b
u
c
U
6
U
5
U
4
U
3
U
2
U
1
Fig. 3.13. Generarea vectorilor de tensiune la ieirea unui invertor trifazat n punte.
U
6
(1.0.1)
U
3
(0.1.0)
a
)
b
)
U
2
(1.1.0)
U
1
(1.0.0)
c b a a
b
c
U
4
(0.1.1)
U
5
(0.0.1)
U
U
b) a)
d
q
Fig. 3.14. Invertor trifazat n punte: a) schema de principiu;
b) vectorii spaiali de tensiune generai.
Cei opt vectori de tensiune sunt reprezentai n figura 3.14. Modul de
generare a vectorilor este sintetizat n tabelul 3.1.
21
Tabelul 3.1
U U
1
U
2
U
3
U
4
U
5
U
6
U
7
U
8
a 1 1 0 0 0 1 1 0
b 0 1 1 1 0 0 1 0
c 0 0 0 1 1 1 1 0
Timpul de aplicare al fiecrui vector elementar este:
f n
t
C
. . 6
1
=
3.4.2. Generarea secvenei de comutare a invertorului
Cunoscnd
d
i
q
, pentru sistemul ortogonal (bifazat), trebuie s
determinm intervalele de timp t
0
, t
1
i t
2
corespunztoare aplicrii vectorilor U
7(8)
, U
1
i U
2
, pentru a obine vectorul de tensiune prescris U* rezultat din sistemul de
reglare. Transformarea factorilor de umplere
d
i
q
pentru tensiunile U
d
i U
q
,
aplicate pe cele dou faze ale modelului ortogonal, n durate de timp pentru modelul
trifazat se face pe baza diagramei din figura 3.17.
d
T
q
T
U
2
(110)
U
1
(100)
U
Fig. 3.17. Conversia mrimilor
d,q
n semnale de comand trifazate.
22
n funcie de sectorul n care se ncadreaz vectorul de tensiune prescris,
ordinea i timpii de aplicare ai vectorilor de tensiune se regsesc n tabelele 3.2 i
3.3, [47].
Tabelul 3.2.
Sector Condiii limit de sector
Ordinea de aplicare a
vectorilor
de tensiune
1
d
> 0;
q
> 0;
q
< 3 .
d
U
8
U
1
U
2
U
7
U
7
U
2
U
1
U
8
2
d
> 0;
q
> 3 .
d
U
8
U
3
U
2
U
7
U
7
U
2
U
3
U
8
3
d
< 0;
q
> 0;
q
< 3 .
d
U
8
U
3
U
4
U
7
U
7
U
4
U
3
U
8
4
d
> 0;
q
< 0;
q
< 3 .
d
U
8
U
5
U
4
U
7
U
7
U
4
U
5
U
8
5
d
< 0;
q
> 3 .
d
U
8
U
5
U
6
U
7
U
7
U
6
U
5
U
8
6
d
> 0;
q
< 0;
q
< 3 .
d
U
8
U
1
U
6
U
7
U
7
U
6
U
1
U
8
Tabelul 3.3.
Sector t
1
t
2
t
0
1
=
3
2
T
t
q
d 1
3
2
T
t
q
=
3
1
4
T
t
q
d 0
2
+ =
3 2
T
t
q
d 1
=
d
q
2
3 2
T
t
=
3
2
1
4
T
t
q
0
3
3
1
T
t
q
+ =
3 2
T
t
q
d 2
+ =
3
1
4
T
t
q
d 0
4
3
1
T
t
q
+ =
3 2
T
t
q
d 2
+ + =
3
1
4
T
t
q
d 0
5
+ =
3 2
T
t
q
d 1
=
3 2
T
t
q
d 2
+ =
3
2
1
4
T
t
q
0
6
+ =
3 2
T
t
q
d 1
3
2
T
t
q
+ =
3
1
4
T
t
q
d 0
3.5. Decuplarea de curent
Diagrama bloc pentru algoritmul de decuplare a curentului este prezentat n
figura. 3.22.
23
+
+
+
+
+
+
+
-
-
+
+
-
*
*
K
K R
R
K
K
PID
1
2
3
4
5
1
2
i
sd
*
i
sq
*
u
sd
*
u
sq
*
L
d
L
q
H
d
(s)
H
q
(s)
R
R
L
d
L
q
i
sd
i
sq
+
+
K
PID
Fig. 3.22. Implementarea SIMULINK a algoritmului de decuplare a curenilor.
3.6. Compensarea tensiunilor de comand
Compensarea tensiunilor de comand este, aa cum am afirmat anterior,
necesar n regiunea de slbire de flux. Aici, componentele pe axele d i q ale
tensiunii, derivate din reglarea de curent i decuplare, pot genera o tensiune statoric
rezultant care depete tensiunea maxim disponibil de la convertor.
Acest fenomen apare mai ales n cazul treptelor de cureni de referin i .
s
U
sm
U
sd
i
sq
i
n cazul n care tensiunea statoric de referin rezultant depete tensiunea
maxim a convertorului, regulatoarele de curent pe axele d i q sunt saturate i se
afecteaz reciproc. Rezultatul este c rspunsul n curent se nrutete, iar curenii
din motor nu pot urmri referinele impuse.
Compensatorul tensiunii de comand este un algoritm soft care alege valorile
optime pentru tensiunile de referin i astfel nct s poat fi reglat
preferenial fa de .
sd
u
sq
u
sd
i
sq
i
24
2 2 2
sm sqComp sd
u u u < +
sd
u
,
sq
u
2 2 2
sm sq sd
u u u < +
sdc
u
,
sqc
u
Rel. 3.24 Rel. 3.25 Rel. 3.26
YES
YES
NO
Fig. 3.23. Schema logic a algoritmului de compensare a tensiunilor de comand.
3.7. Bucla de reglare a vitezei
Sunt prezentate schema de acionare reglabil cu MSMP cu invertor PWM
comandat n curent i schema de acionare reglabil cu MSMP utiliznd un invertor
PWM comandat n tensiune.
3.8. Concluzii
Pentru alimentarea MSMP se utilizeaz invertoare PWM comandate n
tensiune.
Sistemul PWM comandat n curent utilizeaz regulatoare PWM cu histerezis
(cele mai utilizate) i regulatoare cu comparator cu semnal ramp. Pentru
regulatoarele PWM cu histerezis se prezint n mod original diagramele de comutaie
n planul complex i se demonstreaz existena posibilelor cicluri limit de frecven
ridicat. n cazul invertoarelor PWM comandate n tensiune curenii sunt reglai n
buclele de cuplu sau vitez iar generarea vectorilor spaiali de tensiune se
efectueaz pe baza modulrii simetrice, rezultnd tabelele cu ordinea de aplicare a
vectorilor de tensiune i timpii de aplicare ai acestora. Pentru a anula efectele de
25
intercuplare a curenilor, n ecuaiile de tensiune ale componentelor dup cele dou
axe, se prezint algoritmul original de decuplare a curentului i implementarea sa n
SIMULINK. De asemenea se realizeaz un algoritm soft pentru compensarea
tensiunilor de comand, care prin alegerea valorilor optime ale tensiunilor de
referin ( i ) s permit reglarea preferenial a componentei a
curentului fa de componenta .
sd
u
sq
u
sd
i
sq
i
CAPITOLUL 4
REGLAREA N LIMITE LARGI A CUPLULUI I VITEZEI MOTORULUI
SINCRON CU MAGNEI PERMANENI INTERIORI
4.1. Introducere
Pe baza modelului dinamic al MSMPI, determinat anterior i orientat dup
fluxul magnetului permanent (orientat rotor), cuplul electromagnetic i fluxul de
magnetizare pot fi reglate cu ajutorul celor dou componente ale curentului statoric.
Componenta longitudinal ( ) produce fluxul de magnetizare iar componenta
transversal ( ) cuplul.
sd
i
sq
i
e
m
1.2
1.0
0.8
4.2. Reglarea n limite largi a MSMPI
La motoarele fr salien (
q d
L L = ) cel de al doilea termen din expresia
cuplului dispare i deci cuplul poate fi comandat numai prin reglarea curentului .
sq
i
n cazul motoarelor cu magnei interiori (MSMPI), cum este cazul considerat,
componenta longitudinal , care va regla fluxul, prin alocarea unei valori negative
sd
i
0.6
0.4
0.2
1.0 2.0 3.0
Regiunea de
putere constant
e=const.
Limita regiunei
de putere
constant
Regiunea de
cuplu constant
1
0
2
Fig. 4.1. Caracteristica cuplu-vitez la o acionare cu motor de c.c. (mrimi raportate la
valorile nominale).
26
va produce un flux de reacie opus fluxului magnetului permanent i maina va
micora fluxul n ntrefier (slbete cmpul).
Dac pentru curentul negativ nu se prevede nici o reglare cuplul produs
de motor se poate degrada. Pentru a avea un cuplu de valoare maxim, schema de
reglare trebuie s in seama de componenta transversal i s poziioneze vrful
vectorului de curent statoric
sd
i
sq
i
s
i n poziia sa optim. Aceast poziie, dup cum se va
vedea n continuare, rezult din locul geometric al vectorului de curent obinut prin
maximalizarea cuplului pe amper.
4.2.1. Implementarea n regiunea de cuplu constant
Din diagrama fazorial a curentului statoric n sistemul bifazat d-q ataat
rotorului rezult componentele:
sin
cos
s sq
s sd
I i
I i
=
=
(4.3)
nlocuind aceste relaii n ecuaia cuplului (2.77) se obine
( )
( )
+ =
2
2 sin
3
2
2
s q d sq f em
I L L i p m (4.4)
Cuplul maxim, pentru curent constant, se obine din
s
I 0 =
em
m
. Rezult:
( ) ( ) 0 2 cos cos
2
= +
s q d f
I L L (4.5)
Ecuaia transcedental: ( ) ( ) 2 cos cos
2
s q d s f
I L L I = (4.6)
trebuie rezolvat iterativ. Cunoscnd , i se determin uor.
sd
i
sq
i
Pe de alt parte amplitudinea vectorului de curent nu trebuie s depeasc
o valoare limit :
sm
I
sm sq sd s
I i i I < + =
2 2
(4.7)
Condiia (4.7) nseamn c componentele i ale curentului statoric, n
planul d-q, trebuie s se afle totdeauna n interiorul cercului de raz , care
reprezint cercul de curent limit (v. fig. 4.4).
sd
i
sq
i
sm
I
Pentru a avea un cuplu maxim/amper cel mai avantajos unghi al vectorului
de curent se gsete prin rezolvarea ecuaiilor (4.6), (4.7). Ecuaia (4.6) poate fi
pus, innd seama de (4.3), sub formele:
( ) ( )
2 2 2
sin cos cos =
s q d s f
I L L I , (4.8)
( )( )
2 2
sq sd q d sd f
i i L L i = , (4.9)
( ) ( ) 0
2 2
=
sq d q sd f sd d q
i L L i i L L , (4.10)
27
Ecuaia (4.10) reprezint o hiperbol echilater de cuplu constant (v. fig.4.4)
situat n semiplanul stng al planului - [72].
sd
i
sq
i
i
sq,P
axa d
axa q
I
sm
i
sd,P
P
m crete
Hiperbole de cuplu
constant
Hiperbola de raport
cuplu/curent optim
Cercul de curent
limit
Fig. 4.4. Hiperbolele de cuplu constant i cercul de curent limit pentru un MSMPI.
.
axa q
Traiectorie optim
de cuplu/amper
Hiperbola de
cuplu constant
Elipsa de
tensiune limit
Cercul limit
de curent
P
axa d
Fig. 4.5. Locurile geometrice de curent, tensiune i cuplu pentru un MSMPI
28
La viteze sub viteza nominal, datorit unei t.e.m. reduse, exist suficiente
resurse de tensiune n convertor pentru ca locul geometric al limitei de tensiune (o
elips aa cum vom vedea n continuare) s nconjoare cercul de curent limit.
Funcionarea optim se obine (v. fig. 4.5) de-a lungul traiectoriei de raport
cuplu/curent optim pn la limita de curent (punctul P din fig. 4.5)
4.2.2. Implementarea n regiunea de putere constant
La viteze mari, peste viteza nominal, cnd tensiunile aplicate motorului se
apropie de tensiunea maxim a invertorului are loc saturaia regulatoarelor de curent
ale invertorului PWM comandat n curent [51].
Pentru orice valoare a vitezei rotorului, fazorul curentului statoric
este direcionat din originea planului complex spre un punct al elipsei, dar deoarece
este o tensiune maxim, el trebuie totdeauna s se afle n interiorul elipsei, nu n
afara ei. O asemenea elips este o elips limit de tensiune (v. fig. 4.5 i 4.6). Pentru
viteze crescute ale rotorului, exist un grup de elipse, a cror axe sunt invers
proporionale cu viteza rotorului. Este necesar s se mreasc i s se micoreze
astfel c, urmrind limita de tensiune, punctul B se deplaseaz spre punctul C
care se afl pe hiperbola de cuplu M
sq sd s
ji i i + =
'
sq
i
sd
i
A
.
Este uor de observat din figura 4.6 c cuplul maxim posibil obinut este
definit de punctul R la intersecia dintre ambele locuri geometrice limit, i este vizibil
mai mic dect cuplul maxim atins n punctul P pentru regiunea de funcionare la
cuplu constant.
B
A
P
C
R
axa d
axa q
Traiectoria optim
de cuplu/amper
Noua traiectorie
de curent
Hiperbole de cuplu
Elipsa limit de
tensiune
Cercul limit
de curent
Fig. 4.6. Limitrile aprute la funcionarea cu vitez superioar celei nominale
M
max
=M
P
>M
R
M
B
M
A
29
Obinerea coordonatelor punctului C se realizeaz prin rezolvarea ecuaiei
(4.19) pentru i . Regulatorul trebuie s limiteze referina de curent transversal
pentru a rmne n interiorul elipsei n timp ce se descrete valoarea lui .
sd
i
sq
i
sq
i
sd
i
4.3. Tranziia regimurilor de funcionare
Tranziia dintre cele dou moduri de reglare este descris n schema logic
din figura 4.7.
N
<
Rel. 4.11
sq
i Rel. 4.21 i
sd
sd
i
No Yes
, i ,
sq N
Fig. 4.7. Schema logic pentru calculul referinei de curent din axa d.
4.4. Implementarea sistemului complet de reglare combinat a MSMPI i
rezultatele simulrii
Fig. 4.8. Diagrama bloc Simulink pentru sistemul complet de reglare combinat a MSMPI.
Sunt prezentate: rspunsul la treapt de vitez unghiular, rspunsurile
corespondente ale componentelor de curent, traiectoria vectorului de curent, tranziia
dintre modurile de reglare etc.
30
4.5. Concluzii
Aa-numita reglare combinat (sub i peste viteza nominal), cunoscut la
mainile de c.c., se poate aplica i mainilor de c.a. n ceea ce privete cerinele de
cuplu.
n regiunea de cuplu constant, pentru a limita amplitudinea curentului
statoric, componentele acestuia n planul d-q ataat rotorului trebuie s se afle n
interiorul cercului de curent limit iar pentru a avea un cuplu maxim/unitatea de
curent vrful fazorului de curent statoric trebuie s se gseasc pe hiperbola de
cuplu constant.
n regiunea de putere constant, cnd tensiunile aplicate motorului se
apropie de tensiunea maxim a invertorului, se arat c locul geometric al fazorului
de curent statoric este elipsa limit de tensiune.
Pentru tranziia regimurilor de funcionare s-a propus o abordare profesional
a algoritmului de reglare, care se bazeaz i pe calculul componentei longitudinale
a curentului n timpul procesului de slbire de flux.
sd
i
Sistemul complet de reglare s-a implementat n SIMULINK iar regulatoarele
simulrilor confirm concluziile teoretice impuse de limitrile respective.
CAPITOLUL 5
REGLAREA FR SENZORI A MOTORULUI
SINCRON CU MAGNEI PERMANENI INTERIORI BAZAT PE FILTRU
KALMAN EXTINS
5.1. Introducere
Folosind tensiunile statorice i curenii statorici monitorizai i observatoare
Kalman sau Luenberger este posibil implementarea unei acionri cu MSMP de
nalt performan dinamic fr senzori electromecanici de vitez sau poziie.
Filtrele Kalman pot interveni att pentru estimarea mrimilor de stare nemsurabile
ct i pentru filtrarea valorilor msurate care au fost puternic perturbate (de unde i
denumirea de filtru Kalman). Se poate interpreta filtrul Kalman i ca observator.
Un filtru Kalman extins (FKE) este un estimator de stare optim recursiv care
poate fi folosit pentru mbinarea estimrii parametrilor i strii unui sistem dinamic
neliniar n timp real prin utilizarea semnalelor monitorizate de zgomote distribuite ca
zgomote aleatoare (sohastice). Aceasta presupune c zgomotul de msurare i
zgomotul perturbator nu sunt corelate.
Astfel algoritmul FKE conine n esen dou stri: o stare de predicie i o
stare de filtrare.
5.2. Tehnica filtrrii Kalman
Tehnica filtrrii Kalman a fost larg studiat n literatur [10], [14], [23], [38],
[40]. Scopul acestui subcapitol este de a furniza o descriere simplificat a
algoritmului de filtrare Kalman i de a prezenta paii care trebuie urmai pentru
determinarea ecuaiilor filtrului.
31
5.2.1. Estimarea optimal
Estimarea optimal se refer la extragerea unui semnal corect dintr-un set de
date msurate afectate de zgomot, bazndu-se pe ipoteze concrete.
5.2.2. Filtrul Kalman liniar, discret n timp
Se prezint obinerea matricei de amplificare Kalman i ecuaiile care desciu
algoritmul recursiv de filtrare prezentat n figura 5.3.
Introducerea estimrii apriorice
i a covarianei aferente
Calculul amplificrii Kalman
( )
1
+ =
k
T
k k k
T
k k k
R H P H H P K
Proiectarea n viitor
( ) ( ) (k X k k X
= +1 )
( ) ( ) ( ) k Q k P k P
T
k k
+ =
+1
Actualizarea estimrii cu vectorul
mrimilor msurate Y(k)
( ) ( )
+ =
k k k
X k H k Y K X X
Calculul covarianei erorii pentru
estimarea actualizat
( )
=
k k k k
P H K I P
Fig. 5.3. Algoritmul filtrrii Kalman
5.2.3. Filtrul Kalman liniarizat
Se prezint teoria filtrrii liniare a modelului sistemului i forma estimatorului
denumit filtru Kalman liniarizat sau filtru Kalman de perturbaie.
( ) ( ) ( ) t X t X t X
n
+ = (5.30)
5.2.4. Filtru Kalman extins
Idea de baz pentru definirea unui filtru Kalman extins const n reliniarizarea
n jurul fiecrei estimri de stare imediat ce aceasta a fost calculat la
momentul corespunztor t
( ) k X
k
. Imediat ce a fost realizat o nou estimare a strii,
traiectoria de stare nominal este imbuntit i introdus n algoritm. Astfel, se
ntrete valabilitatea ipotezei prin care deviaia de la traiectoria de referin este
suficient de mic pentru a permite aplicarea tehnicilor de linearizare a perturbaiilor
cu rezultate optime.
32
5.3. Aplicarea FKE pentru o acionare cu MSMPI fr senzori
Paii principali n realizarea unei acionri cu MSMPI fr senzori
electromecanici de poziie i vitez, implementat folosind un algoritm FKE, sunt
urmtorii:
selecia modelului mainii n domeniul timp;
discretizarea modelului mainii;
determinarea zgomotului i a matricilor de covarian a strii Q, R, P;
implementarea algoritmului FKE discretizat; acordarea.
5.3.1. Selecia modelului mainii n domeniul timp
Considernd sistemul de referin rotoric (d-q) i faptul c FKE asigur o
estimare precis a strilor, se poate folosi reglarea n cele dou regiuni, de cuplu
maxim pe amper i prin slbire de cmp (cap.4), cu rezultate optime n rspunsul
sistemului (n special la viteze ridicate). Pentru a determina matricile de stare ale
modelului filtrului Kalman extins se va utiliza descrierea motorului n sistemul de
referin d-q orientat dup fluxul magnetului permanent (a se vedea paragraful 2.2.3).
Fa de cele prezentate se va introduce ca variabil de stare i cuplul de sarcin
(dei pentru modelul clasic al motorului constitue mrime de intrare), pentru a ine
seama de efectele variaiei sarcinii la arbore.
s
m
5.3.2. Modelul discret al MSMP n spaiul strilor
Modelul discret al MSMP n spaiul de stare se obine din ecuaiile (5.40) i
(5.41) i acest model se folosete n algoritmul FKE pentru estimarea vectorului de
stare, dac se monitorizeaz (i se eantioneaz) tensiunile i curenii.
u(k)
z
-1
B(k) C(k)
A(k)
x(k)
w(k)
v(k)
y(k)
Fig. 5.7. Modelul sistemului cu FKE.
O parte critic a proiectrii FKE o constituie folosirea valorilor iniiale corecte
pentru diferitele matrici de covarian, Q, R i P. Pentru a obine cele mai bune valori
estimate a strilor, FKE trebuie acordat iar acordarea implic o cutare interactiv a
matricilor de covarian care produc cele mai bune estimri [72].
5.3.4. Implementarea algoritmului FKE discretizat; acordarea filtrului
Filtrul Kalman va fi descris de un sistem discret de ordinul cinci.
33
( )
( )
k
k
s
s
sq f sq sd q d
q
s
q
s
q
f
sq
q
s
sd
q
d
d
s
d
s sq
d
q
sd
d
s
k
s
sq
sd
t w
m
p
J
m
J
B
i
J
p
i i L L
J
p
L
u
L
u
L
i
L
r
i
L
L
L
u
L
u i
L
L
i
L
r
m
i
i
+
+
+
+ + +
=
2
3
2
3
1
cos
1
sin
1
sin
1
cos
2 2
1
Se prezint structura FKE, blocul filtrului Kalman i schema-bloc simplificat a
algoritmului filtrului. n final am observat c, n general, se pot obine urmtoarele
reguli calificative de acordare:
regula 1: dac Q este mare atunci K este mare (i performana tranzitorie
este mai rapid)
regula 2: dac R este mare atunci K este mic (i performana tranzitorie este
mai lent)
totui, dac Q este prea mare sau R este prea mic poate aprea
instabilitate. Matricile de covarian P
0
, Q i R se presupun a fi diagonale de la
nceput, datorit lipsei de informaii de natur statistic pentru evaluarea termenilor
ne-diagonali.
n simulare s-au folosit urmtoarele valori pentru P
0
, Q i R care prin ncercri
au dat rezultatele cele mai bune.
5.4. Modelarea sistemului complet de reglare a MSMPI fr senzori
Fig.5.12. Schema-bloc a implementrii Simulink a strategiei de reglare fr senzori electromecanici
34
Sistemul de acionare complet incluznd motorul, invertorul, estimatorul i
regulatoarele de vitez i curent au fost construite i simulate cu ajutorul limbajului
SIMULINK i funciilor MATLAB. Sistemul complet funcioneaz n bucl nchis,
adic poziia i viteza estimate, generate de filtrul Kalman sunt folosite ca semnale
de reacie pentru regulatoarele de curent i vitez. n figura 5.12 se prezint
implementarea cu ajutorul limbajului SIMULINK
5.5. Rezultatele simulrilor
Rezultatele simulrilor demonstreaz capacitatea FKE de a estima corect
strile sistemului i de a furniza mrimi de reacie pentru regulatoarele de vitez i de
curent.
5.6. Concluzii
Tehnica filtrrii Kalman, prezentat detaliat i logic, este aplicat unei
acionri fr senzori electromecanici cu MSMPI i cuprinde urmtoarele etape:
selecia modelului mainii n domeniul timp;
discretizarea modelului mainii;
determinarea zgomotului i a matricilor de covarian a strii Q, R, P;
implementarea FKE discretizat; acordarea.
O contribuie personal o constituie introducerea unei stri suplimentare,
cuplul de sarcin m
s
, pe lng strile de estimat clasice din modelul de stare al
MSMP (poziie, vitez, componentele curentului statoric). Estimarea acestei variabile
prin includerea ei n modelul de stare i deci n matricea sistemului conduce la
mbuntirea substanial a comportrii mecanice a sistemului.
Prin consideraiile asupra acordrii FKE se determin dou reguli calificative,
simple, de acordare. n urma efecturii mai multor seturi de simulri s-au determinat
valorile pentru matricile P
0
, Q i R care au generat rezultate bune privind estimarea
vitezei i poziiei.
Numeroasele simulri efectuate au demonstrat capacitatea FKE de a estima
corect strile sistemului i de a furniza mrimile de reacie pentru regulatoarele de
vitez i curent.
Trebuie observat totui c filtrul Kalman prezint o mare sensibilitate la
variaia parametrilor motorului.
CAPITOLUL 6
REGLAREA ADAPTIV A MOTORULUI SINCRON CU
MAGNEI PERMANENI INTERIORI
6.1. Introducere
n acest capitol se prezint reglarea adaptiv i estimarea parametrilor
motorului sincron cu magnei permaneni interiori.
6.2. Modele pentru identificarea parametrilor
Sunt prezentate modelele parametrice i modelele de regresie (modelul
ARMA).
35
6.3. Estimarea prin metoda celor mai mici ptrate
6.3.1. Principiul metodei
Gauss a formulat principiul celor mai mici ptrate, conform cruia parametri
necunoscui ai unui model matematic ar trebui alei astfel nct: suma ptratelor
diferenelor dintre parametri actuali observai i valorile lor calculate, nmulite
cu anumite constante care msoar gradul de precizie, este minimizat.
6.3.2. Estimarea recursiv prin metoda celor mai mici ptrate
n regulatoarele adaptive mrimile de stare msurate sunt obinute
secvenial, n timp. Este prin urmare de dorit a efectua calculele recursiv pentru a
economisi timpul afectat acestora n procesor. Calcularea estimrilor prin metoda
celor mai mici ptrate poate fi astfel fcut nct rezultatele obinute la timpul 1 t s
poat fi folosite pentru a genera estimrile de la timpul t .
6.3.3. Parametri variabili n timp
n multe probleme de adaptare, i n special n cazul motorului sincron tratat
n aceast lucrare, este necesar s analizm situaia n care parametrii sunt variabili
n timp.
Prin simpla extindere a metodei celor mai mici ptrate pot fi acoperite dou
cazuri distincte: ntr-unul dintre acestea se presupune c parametri se modific foarte
rapid, dar cu frecven sczut; n cellalt caz, parametri se modific continuu i lent.
Modelul
procesului
Mecanismul
de adaptare
-1
u
y
Fig. 6.1. Schema-bloc a estimatorului recursiv bazat pe msurarea ieirilor
6.4. Reglarea adaptiv a vitezei MSMPI
6.4.1. Specificaiile de proiectare a regulatorului adaptiv
Cele dou tipuri principale de regulatoare adaptive folosite n reglarea vitezei
motoarelor electrice sunt regulatoarele cu model de referin i regulatoarele
autoacordabile. Sunt prezentate structura bloc pentru implementarea regulatorului
adaptiv si structura controller-ului adaptiv.
36
6.4.2. Algoritmul de estimare a parametrilor
Estimatorul parametrilor se utilizeaz pentru a estima, discret n timp,
parametri mecanici ai motorului. Datorit convergenei lor rapide i a uurinei de
implementare, cei mai uzuali estimatori se bazeaz pe estimarea recursiv cu
metoda celor mai mici ptrate. Este prezentat un model, rezultat din ecuaia de
micare, care s fie apropiat scopului propus.
Algoritmul de estimare recursiv prin metoda celor mai mici ptrate duce la
identificarea parametrilor mecanici ai MSMPI (J, B,
f
i
q d
L L ).
6.5. Implementarea strategiei de reglare adaptiv i estimarea
parametrilor
6.5.1. Descrierea general a modelului
Schema-bloc a modelului SIMULINK pentru sistemul complet de reglare
adaptiv este prezentat n figura 6.4. Acest model conine submodele care au fost
prezentate i discutate n subcapitolele precedente. Modelele motorului, al
invertorului i ale matricilor de rotaie nu vor mai fi discutate aici.
Fig. 6.4. Diagrama bloc SIMULINK a unui sistem complet de reglare adaptiv
Este prezentat blocul mascat al generatorului de stare, blocul estimatorilor de
parametri bazat pe funcia RLSE.M i proiectarea blocului de plasare a polilor pe
baza funciei RLSPPS.M
37
6.5.5. Regulatorul adaptiv
Regulatorul adaptiv este un controller digital clasic de tip PI. Performanele
sale sunt specificate n timpul de prim stabilire i n suprareglaj. O soluie mai bun
ar putea fi implementarea unui regulator de IP care difer de primul prin aceea c
plaseaz constanta de amplificare (proporional) n starea reglat n locul erorii de
stare. Dei amndou tipurile de regulatoare au eroare staionar zero la intrri de
reglare zero, regulatorul IP nu are un zero n funcia de transfer cum are regulatorul
PI.
Totui, folosind un regulator de tip PI s-au obinut rezultate bune, care vor fi
prezentate n continuare.
6.6. Rezultatele simulrii
Sunt prezentate pentru funcionarea n gol i n sarcin sub forma celor din
figura 6.9 b.
f
Fig. 6.9b. Parametri estimai ai motorului
6.7. Excitaia persistent justific faptul c parametrii sunt corect estimai
doar n timpul unui regim staionar dup executare unui regim tranzitoriu.
6.8. Concluzii
n acest capitol s-a prezentat modalitatea de realizare a unui regulator digital
adaptiv de vitez pentru un motor sincron cu magnei permaneni.
Pentru aceasta au fost tratate o serie de noiuni preliminare. Acestea conin
algoritmul de estimare dup metoda celor mai mici ptrate recursiv cu eliminare
exponenial, reproiectarea regulatorului adaptiv, excitaia persistent a strilor
mecanice, estimarea parametrilor mecanici i validarea acestor estimri n diferite
regimuri de funcionare.
Originalitatea cercetrilor efectuate n aceast direcie const n discretizarea
modelului continuu n timp al dinamicii mecanice i asocierea sa cu un model ARMA.
38
n acest fel s-a reuit implementarea algoritmului de estimare recursiv prin metoda
celor mai mici ptrate pentru identificarea parametrilor mecanici ai motorului sincron
cu magneti permaneni.
Algoritmul prezentat teoretic a fost implementat ntr-o schem de reglare
adaptiv ntr-un model SIMULINK. Pentru aceasta am elaborat o funcie S-Function
n MATLAB care simuleaz funcionarea unui sistem digital de calcul pentru
estimarea parametrilor i
f
B J , ,
q d
L L
Sistemul de reglare adaptiv a fost realizat n corelaie cu algoritmul de
reglare direct de cuplu prezentat anterior, n care regulatorul de vitez de tip PI a
fost nlocuit cu un regulator adaptiv care realizeaz meninerea polilor sistemului
nchis n locaiile stabilite i n condiiile existenei unui observator de cuplu care
estimeaz corect valoarea cuplului de sarcin la arbore.
Cu ajutorul simulrilor efectuate i prezentate anterior rezult c:
a) un controller adaptiv poate realiza reglarea precis a vitezei MSMP n prezena
modificrii parametrilor mecanici;
b) metoda estimrii celor mai mici ptrate cu eliminare exponenial poate fi
aplicat cu succes pentru estimarea parametrilor mecanici ai MSMP;
c) estimrile sunt corecte numai cnd s-a trecut testul excitaiei persistente i
componentele curentului au completat cel puin o form de und
dreptunghiular. Este necesar s accentum importana testelor de validare.
Fr aceste teste, estimarea incorect a parametrilor este trecut regulatorului
de vitez. Asemenea estimri incorecte pot conduce la o reglare instabil i
bine neles la o reglare nedorit;
d) fluxul magnetic poate fi determinat numai n prezena celei de a patra stri,
nenule, a generatorului de stare: cuplul de sarcin. Deoarece msurarea
direct a sarcinii nu este acceptabil, trebuie implementat un observator de
cuplu, pentru a avea o informaie asupra acestuia ca mrime de stare;
CAPITOLUL 7
REGLAREA DIRECT A CUPLULUI MOTOARELOR
SINCRONE CU MAGNEI PERMANENI
7.1. Introducere
n general, controlul direct al cuplului (DTC) unui motor sincron implic
controlul direct al fluxului nlnuit (de exemplu fluxul nlnuit statoric) i al cuplului
electromagnetic prin aplicarea vectorilor optimi de curent sau de tensiune ai
invertorului care alimenteaz motorul selectai prin utilizarea unui aa numit tabel de
comutaie optim.
7.2. Bazele fizice i matematice ale producerii rspunsului rapid al
cuplului
Sunt prezentate teoretic principalele elemente care stau la baza
principiului pe baza crora se obine tabelul de comutaie optim a vectorilor.
39
Fig. 7.4. Poziia diferiilor fazori spaiali ai fluxului i alegerea optim
a vectorilor de comutaie a tensiunii: FC fluxul crete; FS
Figura 7.4 este sugestiv pentru obinerea tabelului vectorilor de comutaie
optim n funcie de necesitile de cretere sau scdere a fluxului statoric.
Tabelul 7.1. Tabelul de comutaie.
d dm
e
sector 1
(1)
sector 2
(2)
sector 3
(3)
sector 4
(4)
sector 5
(5)
sector 6
(6)
1 u
2
u
3
u
4
u
5
u
6
u
1
1 0 u
7
u
8
u
7
u
8
u
7
u
8
-1 u
6
u
1
u
2
u
3
u
4
u
5
1 u
3
u
4
u
5
u
6
u
1
u
2
0 0 u
8
u
7
u
8
u
7
u
8
u
7
-1 u
5
u
6
u
1
u
2
u
3
u
4
Vectorii de comutaie activi: u
1
=(1 0 0); u
2
=(1 1 0); u
3
=(0 1 0); u
4
=(0 1 1); u
5
=(0 0 1); u
6
=(1 0 1).
Vectorii de comutaie zero: u
7
=(1 1 1); u
8
=(0 0 0).
40
Tabelul 7.2. Selecia sectorului fazorului spaial al fluxului statoric.
Sect
oa-re
Sem
nul
fluxul
ui
sector
1
(1)
sector
2
(2)
sector
3
(3)
sector
4
(4)
sector
5
(5)
sector
6
(6)
Semnul lui
sd
+ + - - - +
Semnul lui
sq
(NU) + + (NU) - -
Semnul lui
sb
- + + + - -
7.3. Reglarea direct a cuplului MSMP alimentat de la VSI
7.3.1. Reglarea direct a cuplului electromagnetic i fluxului statoric folosind
tabelul de comutaie optim a tensiunii
a)
u
6
=(100)
u
5
=(100)
u
4
=(100)
u
3
=(100)
u
2
=(100)
u
1
=(100)
(2)
(6) (5)
(3)
(4)
(1)
( )
e s
m
e s
m ,
Tabelul de selecie a
vectorului de comutaie
optim a tensiunii
1
-1
1
-1
e
m
e
m
s
s
d
e
dm
(n)
n=1,2, ,6)
(n)
s
e
m
Comparator
de flux
Comparator
de cuplu
VSI
b)
MSMP
Fig. 7.6. Controlul direct al fluxului nlnuit i cuplului electromagnetic a MSMP alimentat de la
VSI: a) ase vectori activi de comutaie (u
1
, u
2
, ... , u
6
); b) schema de reglare
41
7.3.1.1. Schema de reglare
Principalul scop este de a selecta acei vectori de comutaie a tensiunii care
produc cel mai rapid rspuns al cuplului electromagnetic. Cei ase vectori activi de
comutaie (u
1
, u
2
, ... , u
6
) i schema DTC a MSMP alimentat de la un VSI sunt
reprezentai n fig. 7.6.
n figura 7.6b eroarea cuplului electromagnetic i eroarea fluxului nlnuit
reprezint intrrile n comparatoarele cu histerezis ale fluxului nlnuit i respectiv
cuplului. Ieirile discrete ale comparatoarelor ( d , ) reprezint intrrile n tabelul
de selecie al vectorului de comutaie optim a tensiunii. Informaia privind poziia
vectorului spaial al fluxului statoric (numrul vectorului) este de asemenea o intrare
n tabel. Figura 7.6a arat cei ase vectori de comutaie a tensiunii i cele ase
e
dm
Tabelul 7.4. Tabelul de selecie a vectorului de comutaie.
sd
di
e
dm
sector 1
(1)
sector 2
(2)
sector 3
(3)
sector 4
(4)
sector 5
(5)
sector 6
(6)
1
u
2
u
3
u
4
u
5
u
6
u
1
1
-1
u
6
u
1
u
2
u
3
u
4
u
5
1
u
3
u
4
u
5
u
6
u
1
u
2
-1
-1
u
5
u
6
u
1
u
2
u
3
u
4
1
-1
s
i
VSI
MSMP
Comparator
e
m
1
-1
e
m
e
dm
e
m
sd
i
Comparator
sd
i
Selecia vectorului
de comutaie
optim a tensiunii
Estimator
e
m
j
e
sd
di
sa
i
sb
i
s
i
s
i
s
i , i
s
sd
i
sq
i
e
m
Fig. 7.8. Reglarea direct a curentului statoric n axa i a cuplului electromagnetic a unui
MSMP alimentat de la VSI.
d
42
7.3.3. Reglarea direct a cuplului folosind un algoritm predictiv pentru
selectarea vectorului de comutaie a tensiunii
Utilizarea procesoarelor digitale de semnal (DSP) permite calcularea on-line
(n timp real) a vectorilor de comutaie, conducnd la soluii optime. Astfel, este de
asemenea posibil s se implementeze scheme DTC n care vectorii necesari de
comutaie ai tensiunii se obin utiliznd algoritmi predictivi. n acest scop se discut,
pe scurt, doi algoritmi. n primul caz se folosete un model matematic al MSMP i
cuplul electromagnetic se estimeaz pentru fiecare perioad de eantionare pentru
toate modurile posibile ale invertorului. Apoi, algoritmul predictiv selecteaz pentru a
da abaterea minim dintre cuplul electromagnetic prezis i cuplul de referin [62].
Deoarece pentru modelul matematic exist multe posibiliti, se vor discuta n
continuare numai conceptele de baz. n continuare, urmeaz descrierea celui de al
doilea algoritm predictiv care se obine din modificarea primului algoritm astfel c
se asigur raportul maxim cuplu / curent.
Pentru a obine algoritmul predictiv, trebuie mai nti determinat un model
corespunztor al MSMP. Acesta se poate baza pe modelul vectorilor spaiali ai
MSMP. Sarcina principal a acestui algoritm de reglare este de a minimiza n fiecare
interval de eantionare diferena dintre cuplul de referin (impus) i cel real. Sunt
prezentate astfel modul de abordare teoretic.
n final ar trebui observat c este posibil s avem unii algoritmi predictivi n
DTC al MSMP n care cuplul electromagnetic se regleaz direct folosind cuplul
electromagnetic n funcie de poziia rotorului i funcie de caracteristicile de curent
ale mainii. Metodele de obinere a unor asemenea caracteristici s-au discutat mai
nainte n paragraful 7.3.1.3.
7.4. Concluzii
Reglarea direct a cuplului MSMP alimentat de la un invertor surs de
tensiune este analizat n detaliu i cuprinde:
reglarea nepredictiv a cuplului electromagnetic i fluxului statoric
folosind tabelul de comutaie otim a tensiunii;
reglarea direct a cuplului i curentului statoric n axa d;
reglarea direct a cuplului folosind un algoritm predictiv.
CAPITOLUL 8
REZULTATE EXPERIMENTALE
Rezultatele experimentale s-au realizat pentru schema de reglare n limite
largi a cuplului i vitezei motorului sincron cu magnei permaneni interiori (MSMPI)
utilizat i pentru simulrile prezentate n capitolele anterioare. Implementarea
algoritmului de reglare fr senzori de vitez i a algoritmului de reglare adaptiv
pentru care s-au prezentat rezultatele simulrilor urmeaz s fac subiectul unor
cercetri experimentale ulterioare datorit bazei materiale nc incomplete.
43
Codul MATLAB pentru algoritmul de calcul al curenilor dup metoda cuplului
maxim pe amper i al slbirii de flux este prezentat mai jos.
function y=iqcalc(x) function y=idcalc(x)
L
d
=0.0087; L
d
=0.0087;
L
q
=0.0228; L
q
=0.0228;
fi= 0.108; fi= 0.108;
V
sm
=45 V
sm
=45
If abs (x(2))<200 If x(2)<=200 % wbase 200
y=x(1); y=fi/(2
*
(L
q
-L
d
))-sqrt((fi/(2
*
(L
q
-L
d
)))
^
2+x(1)
^
2);
elseif x(1)>V
sm
/(L
q
*
x(2)) Else
y=V
sm
/(L
q
*
x(2)); y=(fi/L
d
)+(1/L
d
)
*
sqrt((46.1/x(2))
^
2-(L
q
*
x(1))
^
2);
else y=x(1); end
end
Rezultatele sunt obinute n cazul unei sacini suplimentare, pur ineriale,
rezultnd un moment de inerie total J=J
motor
+J
sarcin
=0.01Kgm
2
i un coeficient de
frecare vscoas B=0.005Nms.
Ca exemplu de rezultate obinute, care sunt explicate i interpretate, este cel
din figura 8.8.
Fig. 8.8. Variaia curentului de faz statoric n timpul reversrii turaiei MSMPI.
44
CONCLUZII FINALE
Concluziile finale ale tezei de doctorat i direciile de cercetare ulterioar se
prezint pe scurt n cele ce urmeaz:
n capitolul 1 se prezint mainile sincrone cu magnei permaneni (MSMP)
ca o alternativ la folosirea mainilor asincrone (MA) n sistemele de acionare
electric. Se evideniaz importana alegerii materialelor magnetice, configuraiile
rotorului i i caracteristicile mainilor. O comparaie ntre MSMP i MA considernd
mai nti numai caracteristicile mainii i apoi ntregul sistem de acionare arat o
cretere a randamentului n favoarea MSMP.
Capitolul 2 cuprinde teoria i modelarea motorului sincron cu magnei
permaneni interiori (MSMPI) considernd regimul staionar i regimul nestaionar
(dinamic). n regim nestaionar se prezint ntr-o manier original ecuaiile fazoriale
(n sistem trifazat i bifazat rotoric) i pe baza ecuaiilor n spaiul strilor se
ntocmete modelul SIMULINK al MSMPI. Acest model se va utiliza n toate
sistemele de reglare prezentate n continuare.
n capitolul 3 dedicat comenzii convertoarelor de putere destinate alimentrii
MSMP se isist pe invertoarele PWM comandate n curent i invertoarele PWM
comandate n tensiune.
Diagramele de comutaie n planul complex ale invertoarelor comandate n
curent cu regulatoare cu histerezis i existena unor cicluri limit de frecven ridicat
reprezint contribuii originale ale autorului.
Pentru invertoarele comandate n tensiune contribuiile originale se refer la;
deducerea pe baza modulaiei PWM simetrice a tabelelor de
generare a vectorilor spaiali de tensiune i ai timpilor de aplicare ai
acestora pentru ncrcare n memoria microcontrolerului;
modelarea n SIMULINK a algoritmului de decuplare a curentului (din
ecuaiile de tensiune) prin compensare anticipativ;
realizarea algoritmului soft pentru compensarea tensiunilor de
comand.
Reglarea n limite largi a cuplului i vitezei MSMPI, tratat n capitolul 4,
cuprinde regiunea de cuplu constant (sub viteza nominal) i regiunea de putere
constant (peste viteza nominal) evideniindu-se: cercul de curent limit, hiperbola
echilater de cuplu constant i elipsa limit de tensiune.
Pentru tranziia regimurilor de funcionare, algoritmul de reglare bazat i pe
calculul componentei longitudinale i
sd
a curentului statoric n timpul procesului de
slbire de cmp este contribuie original a autorului.
n capitolul 5 se trateaz un sistem de reglare n limite largi a cuplului i
vitezei MSMPI fr senzori electromecanici bazat pe filtrul Kalman extins (FKE).
45
Contribuia original a autorului o constituie introducerea, n spaiul strilor, a
unei stri suplimentare i anume cuplul de sarcin m
s
.
Se determin de ctre autor dou reguli calificative de acordare a FKE
(paragraful 5.3.4) i prin simulrile realizate (fig. 5.13 5.24) se demonstreaz
capacitatea FKE de a estima corect strile sistemului i de a furniza mrimi de
reacie pentru regulatoarele de vitez i curent.
Capitolul 6 cuprinde reglarea adaptiv a MSMPI i estimarea parametrilor
prin discretizarea modelului continuu n timp al dinamicii mecanice i asocierea sa cu
un model ARMA (Autoregressive Moving Average).
Implementarea algoritmului de estimare recursiv prin metoda celor mai mici
ptrate pentru identificarea parametrilor mecanici ai MSMPI (J, B,
f
i L
d
-L
q
),
deducerea faptului c estimrile sunt corecte numai dup trecerea testului excitaiei
persistente i cnd componentele bifazate ale curentului au completat cel puin o
form de und dreptunghiular i observarea c fluxul
f
al magnetului permanent
poate fi determinat numai n prezena cuplului de sarcin (rezistiv) m
s
constituiecontribuii originale.
n capitolul 7 se trateaz reglarea direct a cuplului (DTC) a MSMP, subiect
tratat mai puin n literatura tehnic de specialitate din ara noastr. Dup
prezentarea bazelor fizice i matematice ale producerii rspunsului rapid al cuplului
se analizeaz trei scheme de reglare. Deducerea tabelelor de comutaie otim a
tensiunii, pentru fiecare schem, constituie contribuii originale ale autorului.
Rezulatatele experimentale din capitolul 8 confirm cercetrile teoretice
tratate n lucrare.
n ceea ce privete direciile viitoare de cercetare am putea releva estimarea
parametrilor folosind diferite tipuri de inteligen artificial i estimatoare de poziie.
De asemenea se pot investiga soluii noi utiliznd reele neuronale i reele neuro-
fuzzy ca parte a unui sistem adaptiv cu model de referin (MRAS).
46
BIBLIOGRAFIE
1. Adanes, A.K., Optimum Torque Performance in PMSM Drives above Rated
Speed, IEEE Ind. Appl. Society Meeting, Dearborn, Michigan, 1991.
2. Andresen, E.C. and Keller, R., Squirrel cage induction motor or permanent
magnet synchronous motor, Sympon Power Electronics, Electr Drives,
Advanced Electr Motors SPEEDAM96, Capri, Italy, 1996.
3. strom, K.J. and Wittenmark, B., Adaptive Control, Addison-Westley
Publishing, Second Edition, 1995.
4. Bausch, H. and Lange, B. Permanent Magnet AC Servomotors with
Sinusoidal Stator Currents. Beijing International Conference on Electrical
Machines, Aug. 1987.
5. Bedford, B.D. and Hoft, R.G., Principles of Inverter Circuits. New York, John
Wiley and Sons, 1964.
6. Binns, K.J., Chaaban, F.B. and Hameed, A.A.K., The use of buried magnets
in high speed permanent magnet machines, Electr Drives Symposium
EDS90, Capri, Italy, 1990, pp. 145-149.
7. Blaschke, F., Das Verfahren der Feldorientierung zur Regelung der
Drehfeldmaschine. Ph. D. Dissertation. Tech. Universitt Braunschweig,
1973.
8. Bojyup, M., Karlsson, P., Alakula, M. and Gertmar, L., A multiple rotating
integrator controller for active filters, presented at Proc. EPE99 Conf. [CD-
ROM].
9. Bose, B.K. A High-Performance Inverter-fed Drive System of an nterior
Permanent-Magnet Synchronous Motor, IEEE Trans. in Ind. Appl., vol.24,
Nov/Dec 1988, pp.987-997.
10. Bozic, S.M., Digital and Kalman Filtering, The Bath Press, Avon, 1986.
11. Brickwedde, A., Microprocessor-based Adaptive Speed and position for
Electrical Drives, IEEE Trans. on Ind. Appl., vol.21, No.1, Sept./Oct. 1985,
pp.1154-1161.
12. Brod, D.M., Current Control of VSI-PWM Inverters, M.S.E.E. Thesis,
University of Wisconsin, 1984.
13. Brod, D.M. and Novotny, D.W., Current Control of VSI-PWM Inverters, IEEE
Trans. Ind. Appl. Vol. I A-21, vr.4, May June 1985, pp. 562-570.
14. Brown, R.G. and Hwang, P.Y.C., Introduction to Random Signals and Applied
Kalman Filtering, John Wiley & Sons, London, 1992.
15. Buso, S., Malesani, L. and Mattavelli, P., Comparisonof current control
techniques for active filter applications, IEEE Trans. Ind. Electron., vol. 45, no.
5, oct. 1998, pp. 722-729.
16. Chapman, P.L., Sudhof, S.D. and Whitcomb, C.A., Optimal current control
strategies for surface-mounted permanent-magnet synchronous
machinedrives, IEEE Trans. Electromag. Compat., vol. 14, no. 4, Dec. 1999,
47
pp. 1043-1050.
17. Diaconu, L.I., Consideraii privind implementarea unui sistem de reglare
robust pentru o acionare electric, Referat de doctorat, Braov, 2004.
18. Diaconu, L.I., Reglarea adaptiv a acionrilor electrice, Referat de doctorat,
Braov, 2004.
19. Diaconu, L.I., Sensorless control of interior permanent-magnet synchronous
motor based on extended Kalman filter, 10
th
International Conference on
Applied and Theoretical Electricity, Craiova, October 8-9 (n curs de apariie).
20. El-Habrouk, M., Darwish, M.K. and Metha, P., Active power filters: A review,
Proc. Inst. Electr. Eng., vol. 147, no. 5, sep. 2000, pp. 7-12.
21. Feodoreanu, M., Dnil, A., Lunc, Gh. i Diaconu, L.I., Experimental Data
Processing on an Inertia Dynamometer Test-Band for Brake Lining Assembly,
In 10
th
International Congress CONAT, 2004.
22. Fortunato, F. and Haufman, H., Model Reference Adaptive Control of
Thyristor Driven Direct Current Motor System with Resonant Loading, Proc.
IEEE CDC, Dec. 1984, pp.375-380.
23. Franklin, G.F., Powell, J.D. and Workman, M.J., Digital Control of Dynamic
Systems, Addison-Wesley Publishing, 1990.
24. Garces, L.J., Adaptation for the Speed-controlled Static AC Drive with a
Squirrel Cage Induction Motor, IEEE Trans. on Ind. Appl., vol. IA-6, Mar.
1980, pp.173-178.
25. Goodwin, G.C. and Sin, K.S., Adaptive Filtering, Prediction and Control,
Prentice-Hall, Inc., Englewood Cliffs, New Jersey, 1984.
26. Hasse, K., Zur Dynamik Drehzahlgeregelter Antriebe mit Strom-
richtergespeisten Asynchron Kurtzschlusslaufermaschinen. Ph. D. Dis-
sertation. Tech. Hochschule Darmstadt, 1969.
27. Jacobina, C.B., Correa, M.B.R., Oliveira, T.M., Lima, A.M.N. and Da Silva
E.R.C., Current control of unbalanced electrical systems, in Proc. IEEE IAS
conf., oct. 1999, pp. 1011-1017.
28. Jahns, T.M., Kliman, G.B. and Neumann, T.W., Interior PM synchronous
motors for adjustable-speed drives, IEEE Trans on IA 22(4):738-747, 1986.
29. Jahns, T.M. and Macminn, S., Control Techniques for Improved High Speed
Performance of Interior PM Synchronous Motor Drives, IEEE Trans. on Ind.
Appl., vol.27, No.5, Sept/Oct 1991, pp.997-1004.
30. Kim, H., Huk, K.K., Lorenz, R.D. and Jahns, T.M., A Novel Method for Initial
Rotor Position Estimation for IPM Synchronous Machine Drives, IEEE Trans.
Ind. Appl., vol.40, Sept./Oct. 2004, pp.1369-1378.
31. Landau,I.D. and Courtiol, B., High Speed Adaptation System for Electrical
Drives, Automatica, Vol. 11, Jan. 1995, pp. 119-127.
32. Leonhard, W., Regelung in der elektrischen Antriebstechnik. Teuber
Studienbcher, Stuttgart, 1974.
33.
Leonhard, W. and Gabriel, R., Microprocessor Control of Induction Motor,
48
Conf. Rec. IEEE IAS ISPCC, 1982, pp.385-396.
34. Liaw, C.M., Pan, C.T. and Chen, Y.C., Design and Implementation of an
Adaptive Controller for Current-fed Induction Motor, IEEE Trans. in Ind.
Electron., vol. 35, Aug.. 1988, pp.393-401.
35. Lindgren, M. and Svenson, J., control of a voltage-source converter
connected to the grid through and LCL-filter Application to active filtering, in
Proc. IEEE PESC98 Conf. May 1998, pp. 229-235.
36. Lipo,T.A., Sneyers, B. and Novotny, D.W., Field Weakening in Burried
Permanent Magnet AC Motor Drives, IEEE Trans. on Ind. Appl., vol.IA-21,
Mar/Apr 1985, pp.398-407.
37. Mattavelli, P. and Marafo, F., selective active filters using repetitive control
techniques, IEEE Trans. Ind. Electron., vol. 51, no. 5, Oct. 2004, pp. 1018-
1024.
38. Maybeck, P.S., Stochastic Models, Estimation and Control, Academic Press,
New , Academic Press, New York, 1982.
39. Mgureanu, R. i Vasile, N., Servomotoare fr perii de tip sincron. Bucureti,
Editura Tehnic, 1990.
40. Meditch, J.S., Stochastic Optimal Linear Estimation and Control, McGraw Hill
Inc., 1969.
41. Merrill, F., Rotor for synchronous induction Motors, US Patents 2525455 and
2543639.
42. Miller, T.J.E., Brushless Permanent-Magnet and Reluctance Motor Drives,
Oxford University Press, New York, 1989.
43. Mohan, N., Underland, T. and Robbins, W., Power Electronics. New York,
John Wiley and Sons, 1995.
44. Morimoto, S., Sanada, M. and Takeda, Y., Wide Speed Operation of Interior
Permanent Magnet Synchronous Motor with High Performance Current
Regulator, IEEE Trans. on Ind. Appl., vol.30, July/Aug 1994, pp920-926.
45. Mltgen, G., Tiristoarele n practic. Mutatoare cu comutaie de la reea.
Bucureti, Editura Tehnic, 1970.
46. Mueller, K., Entwurf robuster Regelungen. B.G. Tenbner, Stuttgart, 1996.
47. Muntean, N., Convertoare statice. Timioara, Editura Politehnica, 1998.
48. Naitoh, H., Hirano, M. and Tadakuma, Microprocessor-based Adjustable
Speed DC Motor Drives Using Model Reference Adaptive Control, IEEE
Trans. on Ind. Appl., vol. IA-23, Mar./Apr. 1987, pp.313-318.
49. Nakashima, S., Inagki, I. and Miki, I., Sensorless Initial Rotor Position
Estimation of Surface Permanent Magnet Synchronous Motor, IEEE Trans.
Ind. Appl., vol.36, Nov./Dec., 2000, pp. 1598-1603.
50. Novotny, D.W. and Lipo, T.A., Vector Control and Dynamics of AC Drives.
Claredon Press, Oxford,2000.
51. Novotny, D.W. and Lorenz, R.D., Introduction to Field Orientation and High
Performance AC Drives, In Tutorial Course Rec., IEEE-IAS Annual Meeting
49
Conf. Rec., 1985, Sections 1 and 6.
52. Ohnishi, K. and Murakami, T., Application of Advanced Control Techniques
on Electrical Drives, Proc. IEEE Int. Workshop Microcomputer Cont. Electrical
Drives, July 1989.
53. Panaitescu, R.C., A Synchronous Motor Speed Control System Based on the
Internal Angle Deviation Controli, Proceedings of the IV-th Conference on
Optimiyation of Electric and Electronic Equipements, Braov, May 12-14, Vol.
I, 1994, pp 347-350.
54. Panaitescu, R.C., Contribuii la studiul sistemelor de reglare digital a
motorului sincron cu magnei permaneni tez de doctorat, Universitatea
Transilvania din Braov, 1998.
55. Rech, C., Pinheiro, H., Grundling, H.A., Hey, H.L. and Pinheiro, J.R., Analysis
and design of a repetitive predictive-PID controller for PWM inverters, in Proc
IEEE 32nd Annu. Power Electronics Specialists Conf. (PESC01), vol 2,
Vancouver, BC, Canada, 2001, pp. 986-991.
56. Rowan, T., Analysis of Naturally Sampled Current Regulated Pulse-width
Modulated Inverters, Ph. D. Thesis, University Wisconsin, 1985.
57. Sonnenschein, M. and Weinhold, M., Comparison of time-domain and
frequency-domain control schemes for shunt active filters, Eur. Trans. Elect.
Power Eng., vol. 9, no. 1, Jan/feb. 1999, pp. 5-16.
58. Takahashi, I. and Noguchi, T., A new quick response and high efficiency
control strategy of an induction motor. IEEE IAS Meeting, 1985, pp. 496
542.
59. Tursini, M., Petrella, R. and Parasiliti, F., Initial Rotor Position Estimation
Method for PM Motors, IEEE Trans. Ind. Appl., vol.39, Nov./Dec. 2003,
pp.1630-1640.
60. Ttinen, P., The next generation motor control method, DTC, direct torque
control, PEDES, 1996.
61. Tzou, Y.Y., Jung, S.-L. and Yeh, H.C., Adaptive repetitive control of PWM
inverters for very low THD AC-voltage regulation with unknown loads, IEEE
Trans. Power Electron., vol. 14, no. 5, Sep. 1999, pp. 973-981.
62. opa, I., Dnil, A. i Diaconu, L.I., Acionri electrice reglabile cu maini
asincrone, Matrix Rom, Bucureti, 2007.
63. opa, I., Dnil, A. i Diaconu, L.I., Advanced Control of the Electric and
Hybrid Vehicles, Buletinul Universitii Petrol-Gaze din Ploieti, vol. LIII, no.
2bis, 2006.
64. opa, I., Dnil, A. i Diaconu, L.I., Elemente de execuie electrice, Matrix
Rom, Bucureti, 2005.
65. opa, I. i Diaconu, L.I., Acionri electrice reglabile cu maini de curent
continuu, Matrix Rom, Bucureti, 2009.
66. opa, I., Dnil, A. i Diaconu, L.I., The Eddy Current Brakes in Field-
Oriented Cordinate System, Buletinul Institutului Politehnic Iai, vol. LII(LIV),
50
fasc. 5, 2006.
67. opa, I., Diaconu, L.I. i Dnil, A., A Field Oriented Based Method for DTC
of Induction Motor, Proceedings of the 6
th
International Conference on
Electromechanical and Power Systems, October 4-6, Chiinu, Rep.
Moldova, 2007.
68. opa, I., Diaconu, L.I. i Dnil, A. An Improved Speed and Flux-Linkage
Estimation Machines Sensorless Control Systems, Proceedings of the 6
th
International Conference on Electromechanical and Power Systems, October
4-6, Chiinu, Rep. Moldova, 2007.
69. opa, I., Panaitescu, R.C. and Panait, C., A Method of Modeling and
Simulaation of a Permanent Magnet Machine Electric Drive, Proceedings of
the V-th Conference on Optimiyation of Electric and Electronic Equipements
OPTIM96, Braov, May 15-17, Vol. VI, 1996, pp 1577/1584.
70. Topa, I., Panaitescu, R.C. and Panait, C., Modeling and Simulation of a
Permanent Magnet Macgine in Field Oriented Controlled Drives, Buletinul
Institutului Politehnic Iai, Tomul XLI (XLV), Secia III, 1995, pp. 679-685.
71. Vas, P., Electrical machines and drives: a space-vector theory approach.
Oxford University Press, 1992.
72. Vas, P. Sensorless vector and direct torque control. Oxford University Press,
1998.
73. Yamada, M., Riadh, Z. and Funabashi, Y., Design of discrete-time repetitive
control system for pole placement and application, IEEE/ASME Trans.
Mechatron., vol. 4, no. 2, Jun. 1999, pp. 110-118.
74. Zmood, D.N., Holmes, D.G. and Bode G., Frequency domain analysis of three
phase linear current regulators, IEEE Trans. Ind. Appl., vol. 37, no. 2,
Mar./Apr 2001, pp. 601-610.
75. Zmood, D.N. and Holmes, D.G., Stationary frame current regulation of PWM
inverter, in Proc. IEEE IAS99 Conf., Oct. 1999, pp. 1185-1190.
S-ar putea să vă placă și
- Fizica fenomenologică: Compendiu - Volumul 1De la EverandFizica fenomenologică: Compendiu - Volumul 1Evaluare: 4.5 din 5 stele4.5/5 (2)
- Cap4 BobineDocument24 paginiCap4 BobineIonut-Alin OrasanuÎncă nu există evaluări
- Curs Electrotehnica FullDocument130 paginiCurs Electrotehnica FullIorgu CristacheÎncă nu există evaluări
- Producerea Curentului AlternativDocument8 paginiProducerea Curentului Alternativspike9444Încă nu există evaluări
- Proiectarea Sistemului de Actionare Electro Hidraulic Frydembo La o Nava de 7800Document75 paginiProiectarea Sistemului de Actionare Electro Hidraulic Frydembo La o Nava de 7800Anonymous WO9KSfNJ4aÎncă nu există evaluări
- Panouri FotovoltaiceDocument5 paginiPanouri FotovoltaiceMarian ȘoveaÎncă nu există evaluări
- Interfete Pentru Controlul Temperaturii Masei Din Cuva Si Al Turatiei Motorului Pentru o Masina de SpalatDocument15 paginiInterfete Pentru Controlul Temperaturii Masei Din Cuva Si Al Turatiei Motorului Pentru o Masina de SpalatILIUȚĂ-DANIEL BOCȘARU100% (1)
- Curs 4 CESTDocument50 paginiCurs 4 CESTCipri RachitaÎncă nu există evaluări
- Proiect de Disertatie PDFDocument71 paginiProiect de Disertatie PDFOxana LesanÎncă nu există evaluări
- Referat La Actionari Electrice AvansateDocument25 paginiReferat La Actionari Electrice AvansateIzmana IonÎncă nu există evaluări
- Prezentare LicentaDocument30 paginiPrezentare LicentaMiha EllaÎncă nu există evaluări
- Tutorial Femm 2016 PDFDocument33 paginiTutorial Femm 2016 PDFnumaionelÎncă nu există evaluări
- Model Lucrare Diploma Licenta DisertatieDocument12 paginiModel Lucrare Diploma Licenta DisertatieViorel89Încă nu există evaluări
- FizicaDocument10 paginiFizicaLucian GureiÎncă nu există evaluări
- Îndreptarea Hotărârilor Judecătorești În NCPC AranjatDocument7 paginiÎndreptarea Hotărârilor Judecătorești În NCPC AranjatAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Sisteme Informatice de Proiectare Şi Analiză A SEEDocument19 paginiSisteme Informatice de Proiectare Şi Analiză A SEEduncaniada100% (1)
- Mecanisme Cu Şurub Şi Piuliţă.-Soluţii ConstructiveDocument25 paginiMecanisme Cu Şurub Şi Piuliţă.-Soluţii ConstructivePlasztikÎncă nu există evaluări
- V Cecese Van Oana PDFDocument8 paginiV Cecese Van Oana PDFOanaÎncă nu există evaluări
- Tema 2Document2 paginiTema 2Bogdan Gioana100% (1)
- Frâne ElectromagneticeDocument12 paginiFrâne ElectromagneticeStoica DanutÎncă nu există evaluări
- 2 Asmblari DemontabileDocument68 pagini2 Asmblari DemontabileTudor Botezatu100% (1)
- 2 Asmblari DemontabileDocument68 pagini2 Asmblari DemontabileTudor Botezatu100% (1)
- 2 Asmblari DemontabileDocument68 pagini2 Asmblari DemontabileTudor Botezatu100% (1)
- 2 Asmblari DemontabileDocument68 pagini2 Asmblari DemontabileTudor Botezatu100% (1)
- 2 Asmblari DemontabileDocument68 pagini2 Asmblari DemontabileTudor Botezatu100% (1)
- Ghidul Masterandului 2012 2013 v4 PDFDocument32 paginiGhidul Masterandului 2012 2013 v4 PDFgilmeanualexmihaiÎncă nu există evaluări
- Anexa 2. Foaia de TitluDocument6 paginiAnexa 2. Foaia de TitlucoleaÎncă nu există evaluări
- Model Proiectare MenghinaDocument90 paginiModel Proiectare MenghinaAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Micro ActuatoriDocument13 paginiMicro Actuatorirazvanjuv100% (2)
- Sisteme de Filtrare A Aerului.2Document20 paginiSisteme de Filtrare A Aerului.2Alina HriscaÎncă nu există evaluări
- Atestat Chis MariusDocument17 paginiAtestat Chis MariusHiriczko BenÎncă nu există evaluări
- Atestat AlinaDocument21 paginiAtestat AlinaVlad PetruÎncă nu există evaluări
- OrCad-Prezentare GeneralaDocument17 paginiOrCad-Prezentare GeneralaRamona PopescuÎncă nu există evaluări
- Circuit RLCDocument4 paginiCircuit RLCPetre CiprianÎncă nu există evaluări
- Dispozitive OptoelectroniceDocument20 paginiDispozitive OptoelectroniceMarck SolterÎncă nu există evaluări
- Licenta Voian VladDocument60 paginiLicenta Voian VladAlin ArgeseanuÎncă nu există evaluări
- Traductoare Pentru Forta Si CupluDocument7 paginiTraductoare Pentru Forta Si CupluDaniel PostolacheÎncă nu există evaluări
- L9 Traductoare TensorezistiveDocument14 paginiL9 Traductoare TensorezistiveovyttÎncă nu există evaluări
- Lucrare de LicentaDocument100 paginiLucrare de LicentaNicolae GhitaÎncă nu există evaluări
- Referat Actionari ElectriceDocument13 paginiReferat Actionari ElectriceadrianÎncă nu există evaluări
- Campuri Electromagnetice-Surse Si Interactiuni PDFDocument67 paginiCampuri Electromagnetice-Surse Si Interactiuni PDFStefan NiculceaÎncă nu există evaluări
- Curbe de Sarcina ElectricaDocument2 paginiCurbe de Sarcina Electricadanu cibotariÎncă nu există evaluări
- Intreruptoare Cu Aer ComprimatDocument24 paginiIntreruptoare Cu Aer ComprimatADRIANÎncă nu există evaluări
- Senzori Si TraductoareDocument8 paginiSenzori Si TraductoareIonica IonÎncă nu există evaluări
- Cap 2 Prezentare Estimarea Starii StaticeDocument32 paginiCap 2 Prezentare Estimarea Starii StaticeGabriela EftemieÎncă nu există evaluări
- C2 PDFDocument26 paginiC2 PDFrazvanÎncă nu există evaluări
- Studiul Fenomenelor ArmoniceDocument9 paginiStudiul Fenomenelor ArmoniceAlexÎncă nu există evaluări
- Laborator 2 Si 7 (1) .PDF Sisteme Electromecanice Umc Sem2 An2 PDFDocument27 paginiLaborator 2 Si 7 (1) .PDF Sisteme Electromecanice Umc Sem2 An2 PDFdanielÎncă nu există evaluări
- Cem 10Document33 paginiCem 10Radu CîciuÎncă nu există evaluări
- Alimentare Motoare Pas Cu PasDocument9 paginiAlimentare Motoare Pas Cu Pasbobo1992Încă nu există evaluări
- Functii de Reglare Si Comanda Intr-O HidrocentralaDocument14 paginiFunctii de Reglare Si Comanda Intr-O HidrocentralaCristian StamatescuÎncă nu există evaluări
- Masina AsincronaDocument21 paginiMasina AsincronaIsvan FlorinÎncă nu există evaluări
- Descarcari PartialeDocument16 paginiDescarcari PartialestelutsaÎncă nu există evaluări
- Perturbatiile de Retea in Sistem Monofazat Versus Perturbatiile de Retea in Sistem Trifazat - Tifrea - PaulaDocument22 paginiPerturbatiile de Retea in Sistem Monofazat Versus Perturbatiile de Retea in Sistem Trifazat - Tifrea - PaulaGeorge HolmanÎncă nu există evaluări
- Aplicatie SCADA - Panouri FotovoltaiceDocument7 paginiAplicatie SCADA - Panouri FotovoltaiceIonașcu IonÎncă nu există evaluări
- Cap 2 Estimarea Starii StaticeDocument7 paginiCap 2 Estimarea Starii StaticePaul BoangiuÎncă nu există evaluări
- Curs Fiabilitate Editura NOUDocument275 paginiCurs Fiabilitate Editura NOUDeea StateÎncă nu există evaluări
- Alexc IGDDocument30 paginiAlexc IGDAlexGripcăÎncă nu există evaluări
- Cap 2 - Modelarea Elementelor Retelelor ElectriceDocument7 paginiCap 2 - Modelarea Elementelor Retelelor ElectriceAndrei FurtunaÎncă nu există evaluări
- Chestiuni Speciale de ElectrotehnicaDocument22 paginiChestiuni Speciale de Electrotehnicathecrazyman64Încă nu există evaluări
- Militaru Mihai Radu - Senzori Si TraductoareDocument14 paginiMilitaru Mihai Radu - Senzori Si TraductoareNeagoeDanielÎncă nu există evaluări
- Proiect 2 SreDocument7 paginiProiect 2 SreLaurentiu OchirosiÎncă nu există evaluări
- Calcul Manual MFU PDFDocument36 paginiCalcul Manual MFU PDFInstalatiiGeneraleÎncă nu există evaluări
- Calculul Eficientei Ecranarii in Curent AlternativDocument37 paginiCalculul Eficientei Ecranarii in Curent AlternativAnca Georgiana AnghelÎncă nu există evaluări
- Analiza Dinamica - PT StudentiDocument10 paginiAnaliza Dinamica - PT StudentiIulian VînăÎncă nu există evaluări
- 2.3 Sisteme de Reglare Automata Ale Convertoarelor Clasice de Curent ContinuuDocument13 pagini2.3 Sisteme de Reglare Automata Ale Convertoarelor Clasice de Curent ContinuuMihaiRobuÎncă nu există evaluări
- Reglarea Tensiunii Folosind Logica FuzzyDocument11 paginiReglarea Tensiunii Folosind Logica Fuzzykiller klaus100% (2)
- MIS14Document95 paginiMIS14Urban CasianÎncă nu există evaluări
- Diaconu Laurentiu IonelDocument54 paginiDiaconu Laurentiu IoneljaphlmsÎncă nu există evaluări
- Presa Cu ParghiiDocument26 paginiPresa Cu ParghiiAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Curs Mecanisme Si Organe de MasiniDocument96 paginiCurs Mecanisme Si Organe de MasiniLungu Ionut100% (1)
- Lege 101 2016Document31 paginiLege 101 2016Diana CătuţoiuÎncă nu există evaluări
- 10.01.18 Hotărârea NR 1 Din 10 Ianuarie 2018 Pentru Aprobarea Condiţiilor Generale Şi Specifice Pentru Anumite Categorii de ContracteDocument2 pagini10.01.18 Hotărârea NR 1 Din 10 Ianuarie 2018 Pentru Aprobarea Condiţiilor Generale Şi Specifice Pentru Anumite Categorii de Contractegiurgiu iuliaÎncă nu există evaluări
- Curs Mecanisme Si Organe de MasiniDocument96 paginiCurs Mecanisme Si Organe de MasiniLungu Ionut100% (1)
- Instructiunea 3 2017Document16 paginiInstructiunea 3 2017Christi OrendiÎncă nu există evaluări
- Ordin NR 55 - 2017 PDFDocument3 paginiOrdin NR 55 - 2017 PDFAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Instructiunea NR 1 - 2017 PDFDocument17 paginiInstructiunea NR 1 - 2017 PDFSorin ZavalasÎncă nu există evaluări
- Oug 58Document12 paginiOug 58Stefania Poenaru AnghelÎncă nu există evaluări
- FISA DE DATE A ACHIZITIEI 2016 GoalaDocument14 paginiFISA DE DATE A ACHIZITIEI 2016 GoalaAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Instructiunea 3 2017Document3 paginiInstructiunea 3 2017Anonymous WO9KSfNJ4aÎncă nu există evaluări
- Cai de AtacDocument25 paginiCai de AtacAnonymous WO9KSfNJ4aÎncă nu există evaluări
- G Hid Formular Integri TateDocument19 paginiG Hid Formular Integri TateDobrescu GeorgeÎncă nu există evaluări
- Caldari NaDocument3 paginiCaldari NaAnonymous WO9KSfNJ4aÎncă nu există evaluări
- InstructiuniDUAE ACDocument11 paginiInstructiuniDUAE ACRamonaÎncă nu există evaluări
- Suprav CaldarilorDocument10 paginiSuprav CaldarilorAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Item DescriptionDocument2 paginiItem DescriptionAnonymous WO9KSfNJ4aÎncă nu există evaluări
- FISA DE DATE A ACHIZITIEI 2016 GoalaDocument14 paginiFISA DE DATE A ACHIZITIEI 2016 GoalaAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Proiectarea Sistemului de Actionare Electro Hidraulic Frydembo La o Nava de 7800Document1 paginăProiectarea Sistemului de Actionare Electro Hidraulic Frydembo La o Nava de 7800Anonymous WO9KSfNJ4aÎncă nu există evaluări
- 12 - Masini Cu AburDocument1 pagină12 - Masini Cu AburSimion Cosmin - AlinaÎncă nu există evaluări
- Proiectarea Sistemului de Actionare Electro Hidraulic Frydembo La o Nava de 7800Document1 paginăProiectarea Sistemului de Actionare Electro Hidraulic Frydembo La o Nava de 7800Anonymous WO9KSfNJ4aÎncă nu există evaluări