0% au considerat acest document util (0 voturi)
123 vizualizări13 paginiCurs 7 - Complemente TE - PL Ortotrope
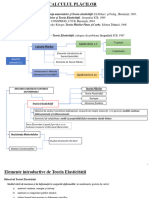
Documentul prezintă teoria elasticității plăcilor plane ortotrope. Sunt prezentate ipotezele generale și relațiile dintre deformații și curburile plăcilor. De asemenea, sunt prezentate ecuațiile de echilibru static pentru plăcile ortotrope.
Încărcat de
Laura DimaDrepturi de autor
© © All Rights Reserved
Respectăm cu strictețe drepturile privind conținutul. Dacă suspectați că acesta este conținutul dumneavoastră, reclamați-l aici.
Formate disponibile
Descărcați ca PDF, TXT sau citiți online pe Scribd
0% au considerat acest document util (0 voturi)
123 vizualizări13 paginiCurs 7 - Complemente TE - PL Ortotrope
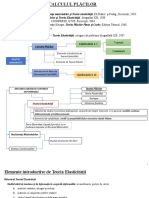
Documentul prezintă teoria elasticității plăcilor plane ortotrope. Sunt prezentate ipotezele generale și relațiile dintre deformații și curburile plăcilor. De asemenea, sunt prezentate ecuațiile de echilibru static pentru plăcile ortotrope.
Încărcat de
Laura DimaDrepturi de autor
© © All Rights Reserved
Respectăm cu strictețe drepturile privind conținutul. Dacă suspectați că acesta este conținutul dumneavoastră, reclamați-l aici.
Formate disponibile
Descărcați ca PDF, TXT sau citiți online pe Scribd