Documente Academic
Documente Profesional
Documente Cultură
ST1 Acr
Încărcat de
Alex ChirilaTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
ST1 Acr
Încărcat de
Alex ChirilaDrepturi de autor:
Formate disponibile
TRADUCTOARE ELECTRONICE
CAPITOLUL 1 NOTIUNI INTRODUCTIVE
1.1 Definitie, generalitati, clasificare
Traductoarele, cunoscute frecvent sub numele de elemente de masura sunt destinate pentru masurarea marimilor conduse si a unor marimi semnificative pe baza carora se pune n evidenta echilibrul proceselor. Prin intermediul lor, se pot obtine informatiile necesare conducerii automate a proceselor n circuit nchis, fiind montate de regula pe bucla de reactie.
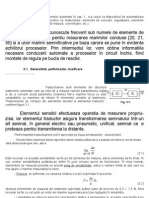
Traductoarele sunt elemente din structura sistemelor automate care au rolul de a masura valorile parametrului reglat si de a converti acest parametru (marime) ntr-o marime fizica ce este compatibila cu marimea de intrare n elementul urmator al sistemului. Traductoarele se compun din elementul sensibil si elementul traductor, conform figurii 1.1.
Elementul sensibil efectueaza operatia de masurare propriu-zisa a semnalului de la intrare x(t), iar elementul x(t) traductor asigura transformarea semnalului ntr-un alt semnal, n general semnal electric sau pneumatic y(t), unificat, semnal ce ndeplineste conditiile pentru a putea fi transmis la distanta.
M ES ET y(t)
Fig. 1.1. Traductoarele electronice transforma marimea fizica de masurat ntr-o marime electrica, utiliznd tehnici electronice. Criteriile de clasificare a traductoarelor electronice sunt urmatoarele: a) Dupa natura marimii fizice neelectrice de intrare, traductoarele sunt: - pentru semnale radiante, termice, chimice, mecanice, magnetice, etc. b) Dupa modul n care se face transformarea semnalului de la intrare si modul de interconectare, traductoarele se mpart n: - traductoare directe, care realizeaza o singura transformare si - traductoare complexe, care nglobeaza mai multe tipuri de traductoare directe si uneori chiar elemente auxiliare. Transformarea directa se face ntr-un singur element fizic iar transformarea complexa (indirecta) se face atunci cnd sunt necesare mai multe transformari succesive ale marimii fizice de intrare. c) Dupa principiul de functionare, traductoarele sunt: - parametrice (modulatoare) si - energetice (generatoare). Traductoarele parametrice sau modulatoare transforma variatia marimii neelectrice de la intrare ntr-o variatie a unui parametru electric (rezistenta, inductanta mutuala,
13
Liliana Vornicu-Albu
capacitate) si necesita o sursa de energie auxiliara (termorezistenta, m arca tensometrica, fotorezistenta, piezorezistenta, bolometrul, etc.). Traductoarele energetice sau generatoare transforma marimea neelectrica de intrare ntr-o tensiune, curent sau sarcina electrica fara a avea nevoie de o sursa auxiliara de energie. Exemple: termopila, fotodioda, fotodetectorul piroelectric, traductorul piezoelectric, etc. d) Dupa forma semnalului electric de iesire, traductoarele sunt: - analogice, la care semnalul produs depinde continuu de marimea de intrare si - numerice, la care semnalul de iesire varia za discontinuu, dupa un anumit cod (operatie de codificare). e) Dupa marimea neelectrica : - Traductoare pentru marimi geometrice: rezistive, inductive, capacitive si numerice de deplasare; cu radiatii; de proximitate. - Traductoare pentru marimi cinematice: de viteza; de acceleratie; de socuri si vibratii; giroscopice. - Traductoare pentru marimi mecanice : elastice (tractiune, compresie, ndoire, cuplu); tensometrice rezistive; cu coarda vibranta; magnetostrictive; de forta; de cuplu. - Traductoare pentru marimi tehnologice: presiune, debite, nivel, temperatura. - Alte traductoare: integrate, etc. Una din variantele de clasificare, n functie de marimea de intrare si cea de iesire, este prezentata schematic n figura 1.2.
x (marime de intrare) y (marime de iesire) Traductor
Semnal Electric
Semnal Neelectric
Parametric
Generator
Frecventa Faza Curent Tensiune Putere
Deplasare Viteza Acceleratie Presiune Nivel Debit Temperatura s.a.
Rezistiv
Inductiv De nalta si joasa frecventa
Capacitiv
Reostatic Termorezistiv Termometric Tensometric Electrolitic Fotoemisiv
cu s, d, variabil
Inductie Piezoelectric Termoelectric pH-metric Efect Hall s.a.
Fig. 1.2
14
TRADUCTOARE ELECTRONICE
Clasificarea traductoarelor este o problema destul de dificila, deoarece varietatea acestora este multipla. n cadrul cursului vor fi prezentate doar traductoarele cele mai uzuale, detalii suplimentare gasindu-se n referintele bibliografice, cu referiri la principiul lor de functionare, prezentarea schematica a acestora, variante constructive posibil de realizat, fara a insista prea mult asupra aspectului matematic al acestora, problema ce revine altor lucrari de specialitate.
1. 2 Performantele traductoarelor Performantele traductoarelor pot fi apreciate pe baza urmatoarelor caracteristici: Sensibilitatea (S) reprezinta limita raportului dintre variatia infinit mica a marimii de iesire si cea de intrare, atunci cnd marimea de intrare tinde spre zero, adica:
lim y x
x 0
(1.1)
Sensibilitatea traductorului se defineste n raport cu marimea de intrare, neglijnd sensibilitatile parazite introduse de marimile perturbatoare. Pentru variatii mici ? x si ? y sensibilitatea se defineste prin raportul dintre variatia iesirii si variatia intrarii. n cazul unei caracteristici statice liniare sensibilitatea este reprezentata de coeficientul unghiular al dreptei.
S= dy y = k = tg dx x
(1.2)
O alta exprimare a sensibilitatii, ce tine seama de domeniul de masurare, este data de relatia:
S= ymax ymin xmax xmin
(1.3)
Din relatia (1.3) rezulta ca sensibilitatea este constanta pentru ntregul domeniu de masurare. n cazul unor caracteristici statice neliniare se pot defini numai valori locale ale sensibilitatii sub forma:
S= dy dx
x = xi
y x
x=x'
(1.4)
15
Liliana Vornicu-Albu
unde ? x si ? y sunt varia tii mici n jurul punctului de coordonate (xi, yi). Sensibilitatea Si se numeste si sensibilitate diferentiala. Din relatiile de mai sus se observa ca sensibilitatea este o marime ale carei dimensiuni depind de dimensiunile marimilor de intrare si de iesire, iar valoarea sa depinde de unitatile de masura utilizate pentru marimile respective. n cazurile caracteristicilor liniare, la care natura marimilor x si y este aceeasi, sensibilitatea (S) se va numi factor de amplificare , daca este supraunitara (S > 1), iar daca S < 1 sensibilitatea se va numi factor de atenuare . Acesti factori sunt adimensionali si sunt frecvent utilizati pentru caracterizarea traductoarelor. Cnd domeniul marimii de intrare este foarte extins, amplificarea sau atenuarea se exprima n decibeli [db] prin relatia: A=20 log (y/x); [db] Uneori se utilizeaza no tiunea de sensibilitate relativa exprimata prin: (1.5)
y y Sr = x x
(1.6)
unde ? y/y este variatia relativa a iesirii, iar ? x /x este varia tia relativa a intrarii. Sensibilitatea relativa (Sr) se exprima printr- un numar adimensional, iar valoarea sa nu depinde de sistemul de unitati si ca urmare Sr este utila la compararea traductoarelor atunci cnd acestea au domenii de masurare diferite. Este necesar ca aceasta sensibilitate sa fie constanta pe tot domeniul de masura, adica elementul sa fie liniar, n caz contrar sensibilitatea putndu-se defini n jurul oricarui punct de functionare. n mod normal, elementele de masurat prezinta un anumit prag de sensibilitate, adica o valoare limita x sub care nu mai apare o marime masurabila la iesire. Pragul de sensibilitate Cea mai mica va riatie a marimii de intrare care poate determina o variatie sesizabila (masurabila) a semnalului de iesire, se numeste prag de sensibilitate. Pragul de sensibilitate este important, ntruct conditioneaza varia tiile minime la intrare care pot fi masurate prin intermediul semnalului de iesire. Factorii care determina pragul de sensibilitate sunt fluctuatiile datorate perturbatiilor interne si externe: zgomotul n circuitele electrice, frecarile statice si jocurile n angrenaje pentru dispozitive mecanice. Calitatea traductoarelor este cu att mai buna cu ct sensibilitatea S este mai mare, iar rezolutia si pragul de sensibilitate sunt mai reduse.
16
TRADUCTOARE ELECTRONICE
Liniaritatea se refera la aspectul caracteristicii statice a elementelor si, aceasta caracteristica nu trebuie sa prezinte curburi si histerezis pe tot domeniul de variatie al marimilor de intrare si iesire. Comportarea dinamica. Aceasta caracteristica se refera la capacitatea elementului de a reproduce ct mai exact si fara ntrziere variatiile marimii masurate. Se apreciaza pe baza functiei de transfer a elementului, adica pe baza constantelor de timp ce intervin sau, uneori pe baza benzii de trecere. Reproductibilitatea, reprezinta proprietatea elementelor de a -si mentine neschimbate caracteristicile statice si dinamice pe o perioada ct mai lunga de timp, n anumite conditii de mediu admisibile. Timpul de raspuns reprezinta intervalul de timp n care un semnal aplicat la intrare se va resimti la iesirea elementului. Acest timp poate fi orict de mic, dar niciodata nul, putnd fi asimilat cu inertia. Gradul de finete se caracterizeaza prin cantitatea de energie absorbita de traductor din mediul de masura, recomandndu-se sa fie ct mai mica pentru a nu influenta desfasurarea procesului. Alegerea traductorului se va face n functie de parametrul reglat, n functie de mediul de masura, n functie de tipul semnalului: continuu, electric sau neelectric, discontinuu, s.a. Rezolutia Sunt traductoare care au caracteristici statice ce nu sunt perfect netede. Ca urmare, la variatii continue ale marimii de intrare (x ) n domeniul de masurare, semnalul de iesire (y) se modifica prin salturi avnd valori bine precizate (deoarece are varia tii discrete). Intervalul maxim de variatie al marimii de intrare necesar pentru a determina aparitia unui salt la semnalul de iesire, se numeste rezolutie. Rezolutia este utilizata, mai ales, la traductoare cu semnale de iesire numerice, a caror caracteristica statica este data printr-o succesiune de trepte. n acest caz rezolutia este data de intervalul de cuantificare ? x al marimii de intrare, iar pentru un domeniu de masurare fixat prin ? x se stabileste numarul de nivele analogice ce pot fi reprezentate de catre semnalul de iesire. Rezolutia reprezinta un indicator de performanta si n cazul unor traductoare considerate (de obicei) analogice, cum sunt traductoarele pentru deplasari liniare sau unghiulare bobinate, la care varia tiile de rezistenta (sau de tensiune - la montajele potentiometrice) prezinta un salt la trecerea cursorului de pe o spira pe alta. Precizia (P) se defineste ca valoarea relativa a erorii exprimata n procente:
17
Liliana Vornicu-Albu
P=
y % y
(1.7)
Obisnuit, elementele de masurat din sistemele automate au clase de precizie de 0,2 1,5 %, fiind necesar sa fie cu cel putin un ordin de marime superioara preciziei reglajului n ansamblu. Scopul fundamental al oricarei masurari, acela de a determinarea si exprima numeric valoarea marimii de masurat, poate fi realizat numai cu un anumit grad de incertitudine. Orict de perfectionate ar fi metodele si aparatele utilizate si orict de atent ar fi controlat procesul de masurare, rezultatul masurarii va fi ntotdeauna diferit de valoarea reala sau adevarata a masurandului.
1. 3 Erorile traductoarelor 1.3.1 Erorile de neliniaritate si histerezis O masura a aproximarii o reprezinta abaterea de la liniaritate sau eroarea de neliniaritate , ilustrata n figura 1.3.
yN y max ? y ? ymax ? y y min A xmin xmax x B B B
Fig. 1.3
n domeniul (x min , xmax ), n care ne intereseaza determinarea erorii de neliniarizare se traseaza dreapta AB (cu linie continua), care aproximeaza cel mai bine caracteristica reala. Paralel cu dreapta AB, se traseaza dreptele AB si AB, astfel nct sa ncadreze ntre ele caracteristica reala. Cea mai mare dintre diferentele ? y si ? y reprezinta abaterea absoluta de la liniaritate , notata prin ? ymax si definita prin relatia:
r =
ymax 100 [ %] ymax ymin
(1.8)
unde: ? ymax este abaterea absoluta de la liniaritate, definita prin relatia:
ymax = y " y ' .
18
TRADUCTOARE ELECTRONICE
Alt tip de eroare, care poate fi estimata pe caracteristicile statice este eroarea de histerezis. Din figura 1.3 se observa ca fenomenul de histerezis se manifesta prin aceea ca se obtin doua nivele diferite ale semnalului de iesire (y) pentru aceeasi valoare a marimii de intrare, n raport cu sensul crescator ( ? ) sau descrescator ( ? ) de varia tie prin care acesta atinge valoarea respectiva. Eroarea de histerezis este data de diferenta dintre cele doua nivele ale semnalului de iesire (y). Pentru a asigura univocitatea valorii masurate, eroarea de histerezis trebuie sa se ncadreze, ca si cea de neliniaritate, sub o limita admisibila. Domeniul de masurare se situeaza pe caracteristica statica n zona n care aceasta este liniara. Domeniul de masurare se exprima prin intervalul [x min xmax ] n cadrul caruia traductorul permite efectuarea corecta a masurarii. Valorile limita minime att pentru intrarea x min , ct si pentru iesirea ymin pot fi zero sau diferite de zero, de aceeasi polaritate sau de polaritate opusa limitei maxime. Pentru traductoarele cu semnal unificat se ntlnesc cazuri n care ymin ? 0 pentru x min = 0, precum si invers: ymin = 0 cnd x min ? 0. Motivatia care justifica existenta acestor situa tii se va explica ulterior. De regula domeniul de masurare se defineste pentru intervalul n care eroarea ramne n limitele admisibile. Observatie. La traductoarele cu semnal unificat, limitele semnalelor de iesire ymin si ymax ramn constante indiferent de limitele x min si x max ale semnalelor de intrare. 1.3.2 Erorile de masurare Eroarea de masurare reprezinta diferenta dintre rezultatul masurarii si valoarea reala. Este evident ca, din punct de vedere calitativ masurarile sunt cu att mai bune cu ct erorile respective sunt mai mici. Problematica erorilor de masurare este complexa. n cele ce urmeaza, se prezinta succint no tiunile necesare pentru ntelegerea semnificatiei preciziei traductoarelor. Cauzele erorilor de masurare sunt multiple si se pot evidentia printr-o analiza atenta a operatiei de masurare. Acestea sunt: n raport cu proprietatile lor generale s-au stabilit urmatoarele criterii de clasificare a erorilor: a) Dupa modul de realizare a operatiei de masurare, erorile pot fi: - erori de interactiune, care sunt provocate de faptul ca elementul sensibil al traductorului exercita o actiune asupra valorii reale a marimii de masurat, astfel nct valoarea efectiv convertita difera de cea reala. Erorile de interactiune pot aparea si ntre diversele componente din structura traductorului. - erorile de model sunt determinate de faptul ca se idealizeaza caracteristicile statice, ignorndu-se anumiti factori care le pot influenta. Determinarea experimentala a caracteristicilor statice prin utilizarea unor etaloane cu precizie limitata, genereaza eroarea de model.
19
Liliana Vornicu-Albu
- erorile de influenta, care apar atunci cnd marimile perturbatoare au variatii mari si nu pot fi compensate (prin mijloace tehnice). b) Dupa caracterul variatiilor si valorilor pe care le pot lua : erorile sistematice, care se produc n acelasi sens n conditii neschimbate de repetare a masurarii si au valori constante sau variabile, dupa o lege determinata n raport cu sursele care le genereaza. erorile aleatoare (ntmplatoare sau accidentale) variaza imprevizibil la repetarea masuratorii, putnd lua va lori diferite att ca sens ct si ca valoare. - erorile grosiere (inadmisibile) afecteaza prea grav rezultatele masuratorii, nct rezultatele nu pot fi luate n considerare. Aceste erori au doua cauze: functionarea incorecta a aparatelor; utilizarea unei metode incorecte de masurare. c) Dupa modul de exprimare valorica prin care se face deosebirea ntre erorile absolute si erorile relative: - erorile absolute sunt: ?x i, ?v i pozitive (sau negative) exprimate n aceleasi unitati de masura cu vi. - eroarea relativa (reala sau conventionala) a unei masurari individuale se defineste prin relatiile urmatoare:
xir = xi v i x v v v = ; vir = i = i x x v v
(1.9)
Erorile relative sunt exprimate prin numere fara dimensiune. Acestea pot estima precizia de masurare, deoarece nglobeaza si informatia cu privire la valoarea marimii masurate. d) Dupa marimea de referinta n functie de care se deosebesc erorile reale fata de erorile conventionale: - eroarea reala (a unei masurari individuale) este notata ? x i si exprima diferenta dintre valoarea masurata v i s i valoarea reala (adevarata) x : xi = v i x - e roarea conventionala a unei masuri individuale este diferenta vi = v i v (1.11) (1.10)
unde: v este valoarea de referinta admisa iar v i reprezinta valoarea masurata. - eroarea admisibila (sau tolerata) reprezinta valoarea limita a erorii ce nu poate fi depasita n conditii corecte de utilizare a aparatului. Cunoscnd valoarea admisibila absoluta ? x ad, intervalul n care se afla valoarea reala (x ) a marimii de masurat este determinat cu probabilitatea 1, conform relatiei:
20
TRADUCTOARE ELECTRONICE
x [ vi xad , vi + xad ]
care poate care poate fi exprimat si n formele:
[ vi xad x vi + xad ]
sau x = vi xad
(1.12) (1.13)
n cazul traductoarelor, n general, se prevad dispozitive pentru compensarea automata a erorilor suplimentare, astfel nct precizia masurarilor sa fie determinata numai de eroarea intrinseca, chiar la variatii mari ale factorilor de mediu. n final eroarea tolerata de aparat, sub forma absoluta, prin care se poate exprima corect precizia masurarii efectuate n conditii reale de functionare, este data de rela tia: xtot = xb xs unde: ? x b este eroarea tolerata intrinseca (de baza) determinata n primul rnd de clasa de precizie ; ? x s este eroarea tolerata suplimentara, calculata corespunzator intervalelor n care se afla marimile de influenta.
1.3.3 Erorile traductoarelor numerice Cele mentionate cu privire la precizie si indicatorii corespunzatori sunt specifice traductoarelor analogice, dar tinnd seama de particularitatile conversiei analog-numerice aceste no tiuni se pot extinde si la traductoarele cu iesiri numerice. La traductoarele cu ie siri numerice, datorita faptului ca adaptorul contine un convertor analog-numeric (CAN), apare o eroare inerenta de metoda, numita eroare de cuantificare, egala cu 1/2 din intervalul de cuantificare ? x , adica 1/2 din bitul cel mai putin semnificativ (LSB). Reducerea acestor erori la valori acceptabile se face prin micsorarea lui ? x . Erorii de cuantificare i se poate adauga eroarea de zero, ilustrata n figura 1.4-a, si/sau eroarea de domeniu prezentata n figura 1.4-b.
21
Liliana Vornicu-Albu
EN (iesire numerica)
EN (iesire numerica)
IA (intrare analogica)
IA (intrare analogica)
a) Eroare de zero
a) Eroare de domeniu
Fig. 1.4
1.4 Caracteristicile si performantele traductoarelor n regim stationar Caracteristicile functionale ale traductoarelor reflecta (n esenta) modul n care se realizeaza relatia de dependenta ntre intrare si iesire (I-E). Performantele traductoarelor sunt indicatori care permit sa se aprecieze masura n care caracteristicile reale corespund cu cele ideale si ce conditii sunt necesare pentru o buna concordanta ntre acestea. Caracteristicile si performantele de regim stationar se refera la situatia n care marimile de intrare si de iesire din traductor nu variaza, adica parametrii purtatori de informatie specifici celor doua marimi sunt invarianti. Caracteristica statica a traductorului este reprezentata prin rela tia intrare iesire (I-E) data de relatia: y = f (x) (1.14)
n care y si x ndeplinesc cerintele unei masurari statice. Relatia (1.14) poate fi exprimata analitic sau poate fi data grafic printr-o curba trasata cu perechile de valori (x , y). Caracteristica y = f (x) reda dependenta I-E sub forma ideala deoarece, n realitate, n timpul func tionarii traductorului, simultan cu marimea de masurat x , se exercita att efectele marimilor perturbatoare externe ?1 , ?2 , ?3 , ..., ?n ct si a celor interne ?1 , ?2 , ?3 , ..., ?r care determina modificari nedorite ale caracteristicii statice ideale.
22
TRADUCTOARE ELECTRONICE
n afara acestor perturbatii (nedorite), asupra traductorului intervin si marimile de reglaj, notate prin C1 ,C2 , C3 , ..., Cq (figura 1.5). Aceste reglaje servesc la obtinerea unor caracteristici adecvate domeniului de variatie al marimii de masurat n conditii reale de functionare a traductorului. Tinnd seama de toate marimile care pot conditiona functionarea ?1, ?2, ?3, ?n, ?1, ?2 , ?3, ?r traductorului, acesta se poate reprezenta printr-o schema functionala restrnsa, X Y ilustrata n figura 1.5. Reglajele marimilor C1 ,C2 , C3 , ..., y = f(x) Cq nu provoaca modificari nedorite ale caracteristicii statice ideale si sunt necesare pentru: C1, C2, C3, C q, - alegerea domeniului de masurare; - prescrierea sensibilitatii traductorului, Fig. 1.5 - calibrarea interna si reglarea zeroului. Marimile perturbatoare externe ?1 , ?2 , ?3 , ..., ?n cele mai importante sunt de natura unor factori de mediu: presiunea, umiditatea, temperatura, cmpuri electrice sau cmpuri magnetice etc. Aceste perturbatii nedorite pot actiona att asupra marimii de masurat, ct si asupra elementelor constructive ale traductorului. Marimile perturbatoare interne ?1 , ?2 , ?3 , ..., ?r se datoreaza zgomotelor generate de rezistoare, de semiconductoare, frecari n lagare, mbatrnirea materialelor care-si schimba proprietatile, varia tii ale parametrilor surselor de alimentare etc. Datorita marimilor perturbatoare, traductorul va functiona dupa o rela tie de dependenta (I - E) reala, descrisa de functia: y = f (x, ?1 , ?2 , ?3 , ..., ?n , ?1 , ?2 , ?3 , ..., ?r); (1.15)
Este important de observat ca erorile sunt generate de varia tiile marimilor perturbatoare si nu de valorile lor absolute care, daca ar ramne constante ar putea fi luate n considerare ca atare n expresia caracteristicii. Modul n care marimile perturbatoare influenteaza iesirea, admitnd ca variatiile lor sunt mici, se pune n evidenta prin dezvoltarea n serie Taylor a functiei (1.15) cu neglijarea termenilor corespunzatori derivatelor de ordin superior. Se obtine:
y= f f f f f x + 1 + ... + n + 1 + ... + r x 1 n 1 r
(1.16)
Derivatele de ordinul I au semnificatia unor sensibilitati:
23
Liliana Vornicu-Albu
f x
- este sensibilitatea utila a traductorului
f f si - sunt sensibilitati parazite. i i
Cu ct sensibilitatea utila va fi mai mare, iar sensibilitatile parazite vor fi mai mici, cu att caracteristica reala a traductorului va fi mai apropiata de cea ideala (1.14). Daca sensibilitatile parazite au valori ridicate, se impune introducerea unor dispozitive de compensare automata. Prin conceptie (proiectare) si constructie, traductoarele se realizeaza astfel nct marimile de influenta (perturbatoare) sa determine efecte minime si deci, sa se poata considera valabila caracteristica statica ideala y = f (x) n limitele unei erori tolerate. n ipoteza de liniaritate si admitnd ca influent ele marimilor perturbatoare nu depasesc eroarea tolerata, forma uzuala pentru caracteristica statica a traductoarelor analogice este: y = k . (x - x 0 ) + y0 (1.17)
n care x 0 si y0 pot lua diverse valori pozitive sau negative, inclusiv zero. Caracteristicile statice liniare sunt tipice pentru traductoare, dar pot aparea, n anumite cazuri particulare (cerute de un S.R.A. - sistem de reglare automata) caracteristici neliniare. n cele ce urmeaza se prezinta cteva exemple de caracteristici statice pentru traductoare: a) caracteristica liniara unidirectionala (figura 1.6), definta prin functia: y = k . (x - x 0 ) + y0 , x = x 0 , k = tg a (panta caracteristicii)
y0 0 x0
a a x 0 x
Fig. 1.6
Fig. 1.7
24
TRADUCTOARE ELECTRONICE
b) caracteristica proportionala liniara bidirectionala (figura 1.7), definita prin func tia: y = k.x; k= tga
c) caracteristica liniara pe portiuni cu zona de insensibilitate si saturatie (figura 1.8) d) caracteristica liniara pe portiuni cu zona de insensibilitate, saturatie si histerezis (figura 1.9)
ys -x2 -x1 0 -ys x1 a x2 x
-x2 -x1 -x 2 -x 1
ys a 0 -ys x 1 x2 x1 x2
Fig. 1.8
Fig. 1.9
Pentru traductoarele cu iesiri numerice caracteristica statica este cvasiliniara, avnd forma din figura 1.10.
yN (k+1) k (k-1)
3 2 1
?x 3?x 2?x (k-1)?x (k+1)?x k?x x
Fig. 1.10
Reprezentarea este pur conventionala, graficul corespunznd echivalentului n sistemul de numeratie zecimal al codului redat de semnalul YN de la iesirea traductorului, pentru diverse valori ale marimii de intrare, considernd un interval de cuantificare ? x .
25
Liliana Vornicu-Albu
Prin unirea punctelor corespunzatoare valorilor medii ale nivelelor de cuantificare se obtine o dreapta ( reprezentata printr-o linie discontinua) ce reprezinta caracteristica statica a traductorului numeric. Exceptnd discontinuitatile datorate operatiei de cuantificare, aceasta caracteristica se considera liniara. Estimarea marimii de ie sire a traductorului ( YN) este cu att mai precisa, cu ct intervalul de cuantificare ? x este mai mic. Caracteristicile statice sunt determinate de legile fizice pe care se bazeaza functionarea elementelor componente din structura traductorului. Aceste caracteristici se deduc prin calcul sau experimental. Raportate la un domeniu larg de varia tie a marimii de intrare, caracteristicile statice se obtin neliniare. Datorita avantajelor pe care le au caracteristicile liniare, se procedeaza fie la limitarea funcitionarii traductorului pe anumite zone ale caracteristicii (unde neliniaritatea este redusa), fie se liniarizeaza pe portiuni caracteristica cu ajutorul unor dispozitive special introduse n structura traductorului. Astfel, caracteristicile statice liniare constituie o aproximare a caracteristicilor reale neliniare, aproximare acceptabila pentru conditiile de utilizare a traductorului.
1.5 Caracteristici si performante n regim dinamic Regimul dinamic al unui traductor corespunde func tionarii acestuia n situatia n care marimea de masurat (x ) si implicit semnalul de iesire (y) variaza n timp. Variatiile marimii de intrare nu pot fi urmarite instantaneu la ie sire, datorita inertiilor care pot fi de natura: mecanica, electromagnetica, termica etc. Functionarea traductorului n regim dinamic este descrisa de o ecuatie diferentiala de tipul:
ak y (k ) (t) = bq x ( q) (t )
k =0 q=0
(1.18)
unde x (q) , y(k) sunt derivatele n raport cu timpul de ordinul q si k ale intrarii x (t) si respectiv iesirii y(t); ak si bq sunt coeficienti (de regula invarianti). Ecuatia caracterizeaza complet regimul dinamic al traductorului daca sunt prevazute: conditiile initiale, valorile marimilor x (t), y(t) si valorile derivatelor la momentul initial t 0 . Pentru ca traductorul (ca element fizic) sa poata fi realizat practic este necesara conditia: n > m, deci se impune ordinul ecua tiei diferentiale. Pentru determinarea solutiei ecuatiei (1.18) se utilizeaza tehnicile uzuale de rezolvare a ecuatiilor diferentiale liniare cu coeficienti constanti. Dupa rezolvarea ecuatiei diferentiale (1.18) se obtine solutia ecuatiei pentru conditii initiale date si marimea de intrare cunoscuta sub forma unei anumite functii de timp:
26
TRADUCTOARE ELECTRONICE
y (t ) = yt1 (t ) + ytf (t ) + ysf (t )
(1.19)
Cei trei termeni ai solutiei (1.19) au semnificatiile: - yt1 (t) ? componenta tranzitorie libera, care nu depinde de intrare, dar depinde de dinamica traductorului, ct si de conditiile initiale nenule de la iesire; - ytf (t) ? componenta tranzitorie fortata, care depinde att de dinamica traductorului ct si de intrare (x ) ; - ysf (t) ? componenta fortata n regim stabilizat (sau permanent), n care, datorita neliniaritatii, se regaseste forma de variatie a intrarii. Traductorul ideal, din punct de vedere al comportarii dinamice, ar fi acela la care sa existe numai ultima componenta n (1.19), fara componente tranzitorii. Analiza comportarii dinamice a traductoarelor utiliznd rezolvari ale ecua tiei (1.19) reprezinta operatii complicate (desi posibile). Din acest motiv se utilizeaza metode mai simple care sa asigure suficienta precizie, dar aprecieri si comparatii mai rapide referitor la performantele dinamice ale traductoarelor. Adoptnd ipotezele simplificatoare: conditii initiale nule, intrari ( x ) standard (impuls sau treapta) se poate aplica transformarea directa Laplace ecuatiei diferentiale si rezulta functia de transfer a traductorului:
Y (s ) H (s) = = X (s )
b s a s
i =0 i j =0 n j
(1.20)
i
Functia de transfer permite determinarea raspunsului traductorului n forma explicita pentru orice tip de variatie a intrarii (x ). De asemenea, func tia de transfer permite o corelare ntre analiza teoretica a regimului dinamic si determinarile experimentale. Analiza performantelor n regim dinamic pentru traductoare utiliznd functia H(s) se poate face astfel: 1) n domeniul timpului utiliznd functia indiciala (raspunsul la semnal treapta) sau functia pondere (raspunsul la semnal tip impuls); 2) n domeniul frecventei, pe baza raspunsului permanent armonic la variatia sinusoidala a intrarii (x ). Analiza n regim dinamic este similara cu analiza de la circuitele electronice (sau din teoria SRA Sistemelor cu Reglare Automata) cu precizarea ca valoarea benzii de stabilizare nu trebuie sa depaseasca valoarea de 2% din semnalul de la iesire n regim stationar (stabilizat) ys. Principalii indicatori de regim dinamic pentru traductoarele analogice sunt: a) eM abaterea dinamica maxima (influentata de factorul de amortizare al traductorului); b) - suprareglarea (supracresterea) definita prin relatia:
27
Liliana Vornicu-Albu
[%] =
M 100 ys
(1.21)
c) Abaterea (eroarea) dinamica curenta definita prin relatia: D = y( t ) y s (1.22)
d) Timpul tranzitoriu (timp de raspuns) tt . Criteriul de delimitare a timpului tranzitoriu (tt ) este stabilit prin rela tia:
D (t ) Bs , t t t
(1.23)
y(t)
eM Bs ys
0,9 y s
T=2p/?
0,1 y s
tc tt
Fig. 1.11 Functia indiciala a unui traductor analogic echivalent cu un element de ordinal II (oscilant - amortizat)
28
TRADUCTOARE ELECTRONICE
1.6 Schema bloc a traductorului electronic Structura generala a unui traductor electronic este reprezentata n figura 1.12. La intrarea traductorului se aplica marimea de masurat X care poate fi: temperatura, debit, presiune, nivel, viteza, etc. Marimea de iesire Y este un semnal electric unificat sau specializat, n functie de aparatele sau sistemelor de achizitii de semnale folosite n aplicatie. Pentru sistemele complexe este necesara caracterizarea procesului de transformare printr-o marime de calitate rezultata din combinarea mai multor parametri. Marimea de calitate se obtine prin operatii specifice masuratorilor indirecte, efectuate asupra mai multor marimi componente din traductor sau asupra semnalelor de iesire de la mai multe traductoare cu structura din figura 1.12.
X SENZOR Elemente de legatura si transmisie Adaptor electronic Y
Surse de alimentare
Fig. 1.12
Functiile blocurilor componente din structura generala a traductorului electronic sunt urmatoarele: Senzorul (elementul sensibil) detector sau captor, este elementul specific fiecarui traductor si are functia de a detecta marimea fizica ce trebuie masurata. Senzorul detecteaza doar marimea de intrare X, eliminnd sau reducnd la minim influentele celorlalte marimi fizice existente n mediul respectiv. Sub actiunea marimii de intrare are loc o modificare de stare a elementului sensibil, modificare ce se manifesta sub forma unui semnal electric la iesirea senzorului. Adaptorul electronic are rolul de a adapta informatia obtinuta la iesirea senzorului la cerintele impuse de sistemele de achizitii de semnale. La intrare, adaptorul electronic se caracterizeaza printr-o mare diversificare, pentru a putea prelua diferitele forme ale semnalelor de la iesirea senzorilor. La iesire, adaptoarele electronice sunt prevazute cu elemente constructive comune, specifice generarii semnalelor electrice unificate si care nu depind de tipul sau domeniul de valori al marimii de intrare.
29
Liliana Vornicu-Albu
Functiile realizate de adaptorul electronic sunt: conditionari de semnale, adaptare de nivel, adaptare de putere sau adaptare de impedanta. Adaptorul electronic asigura conversia variatiilor de stare ale senzorilor n semnale calibrate reprezentnd valoarea marimii de intrare. Realizeaza operatia specifica masurarii (comparatia cu unitatea de masura adoptata). Modurile de comparatie depind de metodele de masurare aplicate si determina diferentieri structurale ale adaptoarelor electronice. Comparatia se face cu o marime elalon, care exercita o actiune permanenta si simultana asupra marimii de intrare. n multe cazuri, comparatia este nesimultana, marimea etalon fiind aplicata din exterior initial n cadrul operatiei de calibrare, anumite elemente constructive memornd efectele sale si utilizndu- le apoi pentru comparatia cu marimea de masurat, singura care se aplica din exterior n aceste cazuri (comparatie succesiva). Din acest motiv, adaptorul realizeaza uneori operatii de calcul liniare (atenuare, amplificare, sumare, integrare, diferentiere), operatii de calcul neliniare (produs, ridicare la putere, logaritmare) sau functii neliniare particulare (compensarea neliniaritatilor unor componente, asigurarea liniaritatii intrare iesire). Elementele auxiliare sunt impuse de unele particularitati tehnologice sau economice. De exemplu, la masurarea temperaturilor ridicate, senzorul nu poate fi amplasat n aceeasi unitate constructiva cu adaptorul, fiind necesare elemente de legatura pentru transmiterea semnalului de la senzor catre adaptorul electronic. Elementele de transmisie realizeaza conexiuni electrice, mecanice, optice, etc. Daca marimea generata de senzor este neadecvata pentru transmisie (de exemplu n cazul transmisiilor la mare distanta) elementele de transmisie au si componente de conversie, n functie de cerintele canalelor de transmisie. Din categoria elementelo r auxiliare fac parte si sursele de alimentare, care pot fi surse de tensiune sau curent continuu sau alternative, tipic stabilizate sau surse de referinta de precizie.
1.7 Tipuri de adaptoare electronice Rolul adaptorului electronic este de a converti marimea generata de senzor n semnal electric la iesirea traductorului electronic. n scopul standardizarii echipamentelor de automatizare si a sistemelor de achizitie de semnale, adaptoarele electronice dau la iesire semnale electrice unificate, adica tensiuni sau curentii electrici ntre limitele: 0 ... + 10 V, -5 ... +5 V, -10 + 10 V sau 2 ... 10 mA, 4 ... 20 mA, indiferent de natura si domeniul de variatie al marimii de intrare n traductor. n cazul semnalelor de iesire unificate n curent, se impun game de variatie cu limita inferioara diferita de zero, pentru a evita situatia cnd la marime neelectrica de intrare zero corespunde curent zero la iesire, caz care poate aparea si la defecte. Etajele de iesire ale adaptoarelor electronice sunt similare pentru acelasi tip de semnal unificat. Diferentierile
30
TRADUCTOARE ELECTRONICE
importante sunt la circuitele de intrare, unde se primesc de la senzori semnale diversificate ca natura fizica si gama de variatie. Adaptoarele electronice pentru senzori parametrici au la intrare circuite specifice marimilor electrice de circuit R, L, sau C. Cele mai utilizate sunt puntile de curent continuu sau de curent alternativ functionnd n regim dezechilibrat. Semnalul de dezechilibru obtinut este amplificat si aplicat etajului de iesire, care l converteste n semnalul unificat. Pentru eliminarea influentei perturbatiilor, se foloseste o reactie negativa care are n bucla ct mai multe din blocurile componente. Atunci cnd fie senzorul, fie schema de masurare are neliniaritati importante, se prevad blocuri de liniarizare sub forma unor generatoare de functii, plasate fie pe legatura directa, fie pe calea de reactie. n unele cazuri, metoda de masurare sau necesitatea eliminarii unor semnale parazite impun folosirea unor blocuri speciale de conditionare: multiplicatoare, extractoare de radicali, ridicare la patrat, mediere, filtrare, etc. Pentru alimentarea schemei de masurare n punte Wheatstone n curent continuu si regim dezechilibrat, este necesara o sursa de tensiune stabilizata, tensiunea de dezechilibru fiind direct influentata de variatiile acesteia. n figura 1.13 este reprezentata schema bloc a unui adaptor electronic pentru un senzor rezistiv.
R Amplificator de tensiune continua
Schema de masurare
Bloc de comparatie Ur
Bloc de liniarizare
Bloc de reactie
Fig. 1.13
Amplificatorul de tensiune continua poate fi de tipul cu cuplare directa, cu modulare-demodulare, de instrumentatie sau cu izolatie. Pentru a obtine iesire n curent se foloseste un convertor tensiune-curent realizat cu amplificatoare operationale, tranzistoare sau circuite specializate. Blocul de reactie este un divizor rezistiv de tens iune sau de curent. Blocul de liniarizare este un generator de functii, realizat cu diode, diode Zener sau tranzistoare si introduce nelinearitati de sens opus celor determinate de senzor sau de schema de masurare, astfel nct relatia intrare iesire a traductorului sa fie liniara. Pentru celelalte tipuri de senzori parametrici, inductivi si capacitivi structura adaptorului electronic este similara. Deosebirile apar n modul de realizare al blocurilor componente. Astfel, schemele de masurare sunt punti de curent alternativ n regim dezechilibrat iar amplificatoarele sunt de curent alternativ selective, acordate pe frecventa de alimentare a puntilor. Separarea galvanica se face mai simplu, prin transformator sau optic. Se complica n schimb liniarizarea si bucla de reactie are mai multe elemente.
31
Liliana Vornicu-Albu
Senzorii de tip generator dau la iesire tensiuni, curenti sau sarcini electrice continui sau alternative. Structura adaptorului electronic pentru senzori tip generator este aproximativ aceeasi ca pentru senzorii parametrici, din care lipseste nsa schema de masurare, tensiunea data de senzor fiind similara cu tensiunea de dezechilibru a puntii Comparatia cu semnalul de reactie se realizeaza cu un amplificator diferential de tensiune. n locul schemei de masurare poate fi un etaj adaptor de impedanta. Cerintele amplificatoarelor folosite n aceste adaptoare de impedanta depind de caracteristicile semnalului generat de senzor, cazurile cele mai frecvent ntlnite fiind: tensiuni continui de nivel mic, tensiuni de frecve nta variabila n limite largi si tensiuni continui sau alternative obtinute de la surse cu impedanta interna foarte mare. Amplificatoarele pentru tensiuni continui de nivel redus trebuie sa aiba o mare stabilitate a parametrilor, obtinuta prin compensarea statica a derivei cu temperatura sau prin termoreglarea substratului, cu derive sub 0.25 V/ C. Amplificatoarele de tensiune de banda larga, exemplu 1 Hz 1 MHz, se folosesc la senzorii electromagnetici, piezoelectnci, magnetostrictivi, etc. Aceste amplificatoare au cuplaje RC ntre etaje si o puternica reactie negativa pentru asigurarea liniaritatii pe ntreaga banda. Amplificatoarele pentru senzori cu rezistenta interna foarte mare, de ordinul 109 (de exemplu, la traductoarele de pH), denumite amplificatoare electrometrice, trebuie sa aiba rezistenta de intrare foarte mare (1012 ... 1014 ), de aceea folosesc la intrare tranzistoare TECMOS sau TECJ sau modulator cu diode varicap.
32
S-ar putea să vă placă și
- Atestat - Traductoare de TemperaturaDocument21 paginiAtestat - Traductoare de TemperaturaLaura Vaught100% (1)
- Curs 1-Sistem de Achizitii de DateDocument17 paginiCurs 1-Sistem de Achizitii de DateAndrei DiaconuÎncă nu există evaluări
- TraductoareDocument4 paginiTraductoareIoana Gheorghe100% (3)
- Traductoare Utilizate in AutomatizariDocument39 paginiTraductoare Utilizate in AutomatizariAdrian Dobrin50% (2)
- Sunetul fizicii: Acustica fenomenologicăDe la EverandSunetul fizicii: Acustica fenomenologicăEvaluare: 4.5 din 5 stele4.5/5 (2)
- Referat Senzori Si TraductoareDocument11 paginiReferat Senzori Si Traductoareeve m,e,s100% (2)
- Senzori Si Traductoare Suport de CursDocument97 paginiSenzori Si Traductoare Suport de CursVadim Creulean100% (3)
- Laborator Sisteme Informatice Si de Control Utilizate La AutovehiculeDocument8 paginiLaborator Sisteme Informatice Si de Control Utilizate La AutovehiculeIonutChioveanu100% (1)
- TraductoareDocument7 paginiTraductoaretanaselenaÎncă nu există evaluări
- Fisa de Documentare SRA 3Document6 paginiFisa de Documentare SRA 3Marian TibranÎncă nu există evaluări
- Atestat TRADUCTOARE INDUCTIVEDocument39 paginiAtestat TRADUCTOARE INDUCTIVEGhideu RazvanÎncă nu există evaluări
- Liceul Tehnologic de Electrotehnică Și Telecomunicații - ConstanțaDocument30 paginiLiceul Tehnologic de Electrotehnică Și Telecomunicații - ConstanțaMardan AsiÎncă nu există evaluări
- Referat TRDocument19 paginiReferat TRTanase ConstantinÎncă nu există evaluări
- Curs3 SA TraductoareDocument6 paginiCurs3 SA TraductoarecarmencioataÎncă nu există evaluări
- TraductorDocument2 paginiTraductorAlina FilipÎncă nu există evaluări
- TRADUCTOAREDocument60 paginiTRADUCTOARETanase Constantin100% (1)
- Copiute MTDocument3 paginiCopiute MTEdiÎncă nu există evaluări
- SACC Stanimir Florin Traductoare de TemperaturaDocument21 paginiSACC Stanimir Florin Traductoare de TemperaturaFlorin StmÎncă nu există evaluări
- Traductoare de Deplasare, Proximitate Si TemperaturaDocument20 paginiTraductoare de Deplasare, Proximitate Si TemperaturaRadu DelaAfumatiÎncă nu există evaluări
- TraductoareDocument37 paginiTraductoarebogdanalaciÎncă nu există evaluări
- Paraschiv 12 A ProiectDocument27 paginiParaschiv 12 A ProiectDesilia AngheleÎncă nu există evaluări
- Curs S.A.DDocument84 paginiCurs S.A.DSerban BiancaÎncă nu există evaluări
- TraductoareDocument40 paginiTraductoarenickususÎncă nu există evaluări
- Traductoare de Deplasare, Proximitate Si TemperaturaDocument12 paginiTraductoare de Deplasare, Proximitate Si TemperaturaRadu DelaAfumatiÎncă nu există evaluări
- Traductoare Capacitive 2012Document11 paginiTraductoare Capacitive 2012Simionov Stefan100% (1)
- Traductoare CapacitiveDocument12 paginiTraductoare CapacitiverrganrielaÎncă nu există evaluări
- 9 MaiDocument33 pagini9 MaiCristache BoieruÎncă nu există evaluări
- TraductoareDocument48 paginiTraductoareGherasim Catalin100% (1)
- TraductoareDocument48 paginiTraductoareCatalin AlexandruÎncă nu există evaluări
- Traductoare Si SenzoriDocument52 paginiTraductoare Si SenzoriPopescu Dorel Mihai100% (2)
- 002 - Curs 2 - ST - Senzori Si TraductoareDocument5 pagini002 - Curs 2 - ST - Senzori Si TraductoareTotoliciu Dan CatalinÎncă nu există evaluări
- SemnalDocument13 paginiSemnalNarcisa LotruÎncă nu există evaluări
- Proiect TraductoareDocument22 paginiProiect TraductoareFlorin CostinÎncă nu există evaluări
- TRADUCTORULDocument14 paginiTRADUCTORULAdrianaÎncă nu există evaluări
- Sisteme de Achizitie Date Pentru Masurarea Turatiei - DacianaDocument61 paginiSisteme de Achizitie Date Pentru Masurarea Turatiei - DacianaMirela ArdeleanÎncă nu există evaluări
- Principii de Bază În Realizarea Senzorilor Și TraductoarelorDocument21 paginiPrincipii de Bază În Realizarea Senzorilor Și TraductoarelorRoxana ElenaÎncă nu există evaluări
- Curs5 SA TraductoareDocument8 paginiCurs5 SA TraductoarecarmencioataÎncă nu există evaluări
- Trad Param Rezistive 3Document18 paginiTrad Param Rezistive 3Saliu ViorelÎncă nu există evaluări
- L1 SENZORI 2019 Rev 1Document6 paginiL1 SENZORI 2019 Rev 1MassÎncă nu există evaluări
- Licenta BunaDocument65 paginiLicenta BunaCazacu AndreiÎncă nu există evaluări
- Referat TraductoareDocument7 paginiReferat TraductoareCata CatalinaÎncă nu există evaluări
- Proiect LicentaDocument50 paginiProiect LicentaSmarandescu Ionut DanielÎncă nu există evaluări
- Senzori CursDocument214 paginiSenzori CursDorinaMcnÎncă nu există evaluări
- Curs 2 Incercarea Autovehiculelor RutiereDocument28 paginiCurs 2 Incercarea Autovehiculelor RutierefantonacÎncă nu există evaluări
- Fisa de Documentare 5 - Traductoare - GeneralitatiDocument4 paginiFisa de Documentare 5 - Traductoare - Generalitatiraceanu_catalin7449Încă nu există evaluări
- Fisa ADocument4 paginiFisa AMircea Nicolae CădariuÎncă nu există evaluări
- Traductoare Piezoelectrice 1Document13 paginiTraductoare Piezoelectrice 1Alex TronciuÎncă nu există evaluări
- Laboratoare 5 8Document2 paginiLaboratoare 5 8Ady MokanuÎncă nu există evaluări