S-ar putea să vă placă și
- Instructiuni Circulatie Drumuri PubliceDocument4 paginiInstructiuni Circulatie Drumuri PubliceMonica StanÎncă nu există evaluări
- Instructiune CalculatorDocument7 paginiInstructiune CalculatorMonica StanÎncă nu există evaluări
- Instruire Introductiv GeneralaDocument27 paginiInstruire Introductiv GeneralaMonica StanÎncă nu există evaluări
- TEMATICIDocument4 paginiTEMATICICostan GinaÎncă nu există evaluări
- Verificare Tehnica ISCIRDocument1 paginăVerificare Tehnica ISCIRFlorinÎncă nu există evaluări
- Tematica Instructaj Trimestrial PSIDocument1 paginăTematica Instructaj Trimestrial PSIMarchiș AlexandraÎncă nu există evaluări
- Echipamente de Stingere A IncendiilorDocument11 paginiEchipamente de Stingere A IncendiilorMonica Stan100% (3)
- IP-SU-06 Regulament Lucru Cu Foc DeschisDocument5 paginiIP-SU-06 Regulament Lucru Cu Foc DeschissonimagdaÎncă nu există evaluări
- Ipssm Op DanaDocument10 paginiIpssm Op Danajenel NiculaeÎncă nu există evaluări
- Instructiune MercantizorDocument5 paginiInstructiune MercantizorAnghel DorinÎncă nu există evaluări
- Explicatie Detaliata Pictograme Substante Chimice - Fraze de Securitate - PpsDocument9 paginiExplicatie Detaliata Pictograme Substante Chimice - Fraze de Securitate - PpsMonica StanÎncă nu există evaluări
- LEGE nr.319 Din 2006Document25 paginiLEGE nr.319 Din 2006petre olteanuÎncă nu există evaluări
- nr15 MagazinerDocument3 pagininr15 MagazinerVioletta IurieÎncă nu există evaluări
- Instructiuni SSM PoartaDocument2 paginiInstructiuni SSM PoartaMonica Stan100% (1)
- StrungDocument26 paginiStrungAurora Cojocea50% (6)
- Instruire Periodica, Tematica 1 - 2Document3 paginiInstruire Periodica, Tematica 1 - 2Anca ChiraÎncă nu există evaluări
- I. Cerinţe Generale de Protecție A Lucrătorilor La Locul de Lucru Și Prevenire A Riscurilor ProfesionaleDocument6 paginiI. Cerinţe Generale de Protecție A Lucrătorilor La Locul de Lucru Și Prevenire A Riscurilor ProfesionaleUVTÎncă nu există evaluări
- Evaluarea Riscurilor de Accidentare Si Imbolnavire ProfesionalaDocument23 paginiEvaluarea Riscurilor de Accidentare Si Imbolnavire ProfesionalaAnca PirvanÎncă nu există evaluări
- Evaluare Programator ITDocument17 paginiEvaluare Programator ITMonica Stan100% (1)
- Ipssm Utilizarea EIPDocument9 paginiIpssm Utilizarea EIPIonÎncă nu există evaluări
- Tematica SSM - TESA SoferDocument1 paginăTematica SSM - TESA SoferAnca PirvanÎncă nu există evaluări
- Instructiuni Proprii de SSMDocument4 paginiInstructiuni Proprii de SSMaurel vilcuÎncă nu există evaluări
- Operator Statie Betoane, AsfaltDocument21 paginiOperator Statie Betoane, Asfaltalexom01Încă nu există evaluări
- 2020..adresa Cu Masuri SSM Şi Prim Ajutor Pentru Perioadele CaniculareDocument9 pagini2020..adresa Cu Masuri SSM Şi Prim Ajutor Pentru Perioadele CaniculareAndrei PureceÎncă nu există evaluări
- Organizarea Apararii Pe Locul de MuncaDocument1 paginăOrganizarea Apararii Pe Locul de MuncaAlina KiraÎncă nu există evaluări
- Model Plan Evacuare Institutii - Operatori EconomiciDocument17 paginiModel Plan Evacuare Institutii - Operatori EconomiciVica IancuÎncă nu există evaluări
- Producere IncendiuDocument14 paginiProducere IncendiuMonica StanÎncă nu există evaluări
- 01 Ipssm Masuri de Prim AjutorDocument16 pagini01 Ipssm Masuri de Prim AjutorAndreeaÎncă nu există evaluări
- HG-nr.-1425-2006 - ACTUALIZATA 2022Document81 paginiHG-nr.-1425-2006 - ACTUALIZATA 2022dan botezatuÎncă nu există evaluări
- NSSM 26Document35 paginiNSSM 26Adrian MarinÎncă nu există evaluări
- Instructiuni Proprii SsmdocxDocument34 paginiInstructiuni Proprii SsmdocxoctavÎncă nu există evaluări
- Lacatus MecanicDocument26 paginiLacatus MecanicRazvanÎncă nu există evaluări
- Standard Ocupational BarmanDocument21 paginiStandard Ocupational BarmanAnonymous RUVTR8PaH100% (1)
- INSTRUCTIUNIDocument52 paginiINSTRUCTIUNIGanguCE100% (1)
- XXX Plan Prevenire Si ProtectieDocument5 paginiXXX Plan Prevenire Si ProtectieRus Claudiu AlinÎncă nu există evaluări
- 67-Cod 03002-Proced de Execut A Contr Medical Periodic Al AngajatilorDocument2 pagini67-Cod 03002-Proced de Execut A Contr Medical Periodic Al AngajatilorHope HopeÎncă nu există evaluări
- Tematica 2022 ElectricianDocument4 paginiTematica 2022 ElectricianCosmina RøxanaÎncă nu există evaluări
- Evaluare SpalatorDocument12 paginiEvaluare SpalatorPop AndradaÎncă nu există evaluări
- Ipssm Butelii de OxigenDocument7 paginiIpssm Butelii de OxigenEu MisÎncă nu există evaluări
- Organizare Psi EchipaDocument1 paginăOrganizare Psi EchipaMonica StanÎncă nu există evaluări
- IP SSM 12 - Bucatarie, Bar, RestaurantDocument6 paginiIP SSM 12 - Bucatarie, Bar, RestaurantAndreea AnghelescuÎncă nu există evaluări
- Instr. Interne - BucatarDocument4 paginiInstr. Interne - Bucatarpetrescu danny100% (1)
- Decizie Serviciu InternDocument1 paginăDecizie Serviciu InternCostina StoicaÎncă nu există evaluări
- HG 1425 Din 2006 ActualizataDocument156 paginiHG 1425 Din 2006 ActualizataLiviuÎncă nu există evaluări
- Instructiuni Proprii GeneraleDocument10 paginiInstructiuni Proprii GeneraleMihaela StoicaÎncă nu există evaluări
- Spalator de VaseDocument4 paginiSpalator de VaseIurie CiocaÎncă nu există evaluări
- Test G SSM - Protectia Mediului, ImbuteliereDocument3 paginiTest G SSM - Protectia Mediului, ImbuteliereVasile GhiocÎncă nu există evaluări
- Telefonist Si TelesalesDocument8 paginiTelefonist Si TelesalesadorinmihaiÎncă nu există evaluări
- Instructiuni Utilizare FlexDocument2 paginiInstructiuni Utilizare FlexMihai VeresÎncă nu există evaluări
- IPSSM - 4instructiuni Proprii Prevenire IncendiiDocument5 paginiIPSSM - 4instructiuni Proprii Prevenire IncendiiALINA LUCREŢIA DUMITRAŞÎncă nu există evaluări
- IPSSM 10 MicroclimatDocument2 paginiIPSSM 10 MicroclimatDan FirtulescuÎncă nu există evaluări
- Ip SSM Gestionar Vanzator Produse NealimentareDocument32 paginiIp SSM Gestionar Vanzator Produse NealimentareIon TurcanuÎncă nu există evaluări
- Masuri Tehnico - Organizatorice, Prevenire, Alarmare, InterventieDocument8 paginiMasuri Tehnico - Organizatorice, Prevenire, Alarmare, InterventieEd'Încă nu există evaluări
- NSSM - 007 - BetoaneDocument32 paginiNSSM - 007 - BetoaneAnonymous baIaf1xUÎncă nu există evaluări
- Model-Tematica SSMDocument4 paginiModel-Tematica SSMFlorentina DraghiciÎncă nu există evaluări
- Tematica MacaragiuDocument1 paginăTematica MacaragiuIrinel BnÎncă nu există evaluări
- Decizie de Reducere A Timpului de LucruDocument1 paginăDecizie de Reducere A Timpului de LucruDonatella HulubanÎncă nu există evaluări
- Permis Lucru Cu Foc - F-BSSM 10Document2 paginiPermis Lucru Cu Foc - F-BSSM 10MarryNettaÎncă nu există evaluări
- Evaluare Riscuri Operator Statie EpurareDocument34 paginiEvaluare Riscuri Operator Statie EpuraregigimocanescuÎncă nu există evaluări
- Istructiuni Folosire Malaxor Framantat AluatDocument9 paginiIstructiuni Folosire Malaxor Framantat AluatMihaela BarbaianiÎncă nu există evaluări
- Raportul Administratorului PT C.S.S.MDocument2 paginiRaportul Administratorului PT C.S.S.MCatalin SalaruÎncă nu există evaluări
- CONCASORISTDocument12 paginiCONCASORISTbestmarlanuÎncă nu există evaluări
- Sanctiuni Si Contraventii SSM PDFDocument8 paginiSanctiuni Si Contraventii SSM PDFDaniela RaduÎncă nu există evaluări
- OMAA Nr. 121 Din 2000 - N.Sp. Psi AGRICULTURĂDocument63 paginiOMAA Nr. 121 Din 2000 - N.Sp. Psi AGRICULTURĂorsiÎncă nu există evaluări
- Panificatie ScanatDocument29 paginiPanificatie ScanatdanixwebÎncă nu există evaluări
- 1 Evaluare MuzicianDocument21 pagini1 Evaluare MuzicianCipri CipÎncă nu există evaluări
- Oferta SSM+SUDocument4 paginiOferta SSM+SUadorinmihaiÎncă nu există evaluări
- Vulcanizator-Industrial Fisa de PostDocument30 paginiVulcanizator-Industrial Fisa de PostMiulescu CristinaÎncă nu există evaluări
- Plan de Prevenire Si Protectie Operator Sectie StantariDocument4 paginiPlan de Prevenire Si Protectie Operator Sectie StantariSpan DanielÎncă nu există evaluări
- Abricht 300 Universal DRGDocument8 paginiAbricht 300 Universal DRGAdorian IonescuÎncă nu există evaluări
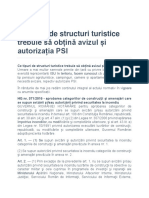
- Ce Tipuri de Structuri Turistice Trebuie Să Obțină Avizul Și Autorizația PSIDocument6 paginiCe Tipuri de Structuri Turistice Trebuie Să Obțină Avizul Și Autorizația PSIMonica StanÎncă nu există evaluări
- Cazare BaietiDocument16 paginiCazare BaietiMonica StanÎncă nu există evaluări
- Anexa Procedura Privind Orele SuplimentareDocument2 paginiAnexa Procedura Privind Orele SuplimentareMonica StanÎncă nu există evaluări
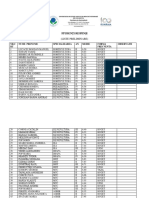
- Studenti Respinsi PDFDocument3 paginiStudenti Respinsi PDFMonica StanÎncă nu există evaluări
- Afis GazDocument1 paginăAfis GazMonica StanÎncă nu există evaluări