S-ar putea să vă placă și
- Masini Hidraulice CavitatieDocument8 paginiMasini Hidraulice CavitatieElena Presura - ChirilescuÎncă nu există evaluări
- Proiect CalimanestiDocument98 paginiProiect CalimanestiAndreea Bogdanescu100% (1)
- Exploatarea Turbinei KaplanDocument11 paginiExploatarea Turbinei KaplanStefania BaltaÎncă nu există evaluări
- Repararea Pompelor CentrifugeDocument9 paginiRepararea Pompelor Centrifugecoman_claudiu_silviuÎncă nu există evaluări
- Netezirea Suprafetelor Prin RulareDocument2 paginiNetezirea Suprafetelor Prin RularePertea FlorinÎncă nu există evaluări
- Curs 1CHEDocument6 paginiCurs 1CHEDaniel Pop0% (1)
- Caiet de SarciniDocument44 paginiCaiet de Sarcinijacky jackyÎncă nu există evaluări
- MFMH Lucrarea 4 - Cuplare Serie Si ParalelDocument7 paginiMFMH Lucrarea 4 - Cuplare Serie Si ParalelIonut Cocianga100% (1)
- Transformatorul Electric Ti Parti ComponenteDocument20 paginiTransformatorul Electric Ti Parti ComponenteFranciuc VladÎncă nu există evaluări
- Issm-He 001Document13 paginiIssm-He 001dj_danyÎncă nu există evaluări
- Echipamente ElectriceDocument17 paginiEchipamente ElectriceIonașcu IonÎncă nu există evaluări
- INTRERUPTOR Cu SF6-mentenantaDocument12 paginiINTRERUPTOR Cu SF6-mentenantaCiolpan CristianÎncă nu există evaluări
- Prezentare Spatiul Hidrografic BanatDocument30 paginiPrezentare Spatiul Hidrografic BanatFlavius SebastianÎncă nu există evaluări
- Barajul VadeniDocument2 paginiBarajul Vadenicristina.sorana.ionescu6397Încă nu există evaluări
- Contoare Ultrasonice Țurcanu CorneliuDocument15 paginiContoare Ultrasonice Țurcanu CorneliuCorneliu Turcanu100% (1)
- Modelul Curentului Unidimensional de FluidDocument39 paginiModelul Curentului Unidimensional de FluidMiha MihaÎncă nu există evaluări
- 40 de Ani CHE Portile de Fier IDocument25 pagini40 de Ani CHE Portile de Fier IRazvan RomanÎncă nu există evaluări
- Caiet-Sarcini - Retea-CanalDocument9 paginiCaiet-Sarcini - Retea-CanalOsman PetreÎncă nu există evaluări
- Automatizari Teorie Si Aplicatii2013Document146 paginiAutomatizari Teorie Si Aplicatii2013Octavian MangosÎncă nu există evaluări
- Barajul Motru Si CHE TismanaDocument2 paginiBarajul Motru Si CHE Tismanacristina.sorana.ionescu6397Încă nu există evaluări
- 4.pompe AxialeDocument15 pagini4.pompe AxialetheocrisÎncă nu există evaluări
- Cap 2 - Modelarea Elementelor Retelelor ElectriceDocument7 paginiCap 2 - Modelarea Elementelor Retelelor ElectriceAndrei FurtunaÎncă nu există evaluări
- Laborator 6 MusuroiDocument5 paginiLaborator 6 MusuroiStanciu AlinÎncă nu există evaluări
- Optimizarea Construcţiei Maşinii Sincrone Cu Magneţi PermanenţiDocument2 paginiOptimizarea Construcţiei Maşinii Sincrone Cu Magneţi PermanenţiUrsatii Nicolai100% (1)
- Instructiuni Tehnice Pentru Exploatarea DecantoarelorDocument8 paginiInstructiuni Tehnice Pentru Exploatarea Decantoarelorcostel11Încă nu există evaluări
- Pompe, Ventilatoare, Compresoare (I)Document91 paginiPompe, Ventilatoare, Compresoare (I)Deleanu DanielÎncă nu există evaluări
- Curs6 MH 2019Document36 paginiCurs6 MH 2019Petruta OloguÎncă nu există evaluări
- 10 C1 C2 AHP 2022 2023 Introducere CircuiteDocument49 pagini10 C1 C2 AHP 2022 2023 Introducere CircuiteSorin Cretu100% (1)
- ExpandoareDocument3 paginiExpandoareMarius CoșoiÎncă nu există evaluări
- Tensiune Curent PutereDocument2 paginiTensiune Curent PutereSergiu Canureci100% (1)
- Intocmirea Si Interpretarea Hartilor Cu Hidroizohipse (Piezometrice) in Cazul Unui Acvifer Cu Nivelul LiberDocument4 paginiIntocmirea Si Interpretarea Hartilor Cu Hidroizohipse (Piezometrice) in Cazul Unui Acvifer Cu Nivelul LiberIulia Alexandra100% (1)
- Grille MH ScrisDocument6 paginiGrille MH ScrisObogeanu AndreeaÎncă nu există evaluări
- Mecanisme Si Organe de MasiniDocument53 paginiMecanisme Si Organe de MasiniRadu PandaÎncă nu există evaluări
- Decantoare Cu EtajDocument6 paginiDecantoare Cu EtajAlexandru ZotescuÎncă nu există evaluări
- Lovitura de Berbec 2Document20 paginiLovitura de Berbec 2Veres SzabolcsÎncă nu există evaluări
- Carte Tehnica ASU PDFDocument28 paginiCarte Tehnica ASU PDFDimitriu CarmenÎncă nu există evaluări
- Pornirea TurbineiDocument9 paginiPornirea Turbineibdiaconu20048672Încă nu există evaluări
- Proiect La HidraulicaDocument7 paginiProiect La HidraulicaBoisoreanu AntonioÎncă nu există evaluări
- Decantor VerticalDocument10 paginiDecantor VerticalPhilip HendrixÎncă nu există evaluări
- Manual Statie Epurare GVDocument14 paginiManual Statie Epurare GVMeMySelf&MyMusicÎncă nu există evaluări
- Procese Si Caracteristici in MAI 1 - 7Document18 paginiProcese Si Caracteristici in MAI 1 - 7Ivan PaliiÎncă nu există evaluări
- TurbomasiniDocument25 paginiTurbomasiniFlorin DamianÎncă nu există evaluări
- Rolul Si Clasificarea TraductoarelorDocument1 paginăRolul Si Clasificarea TraductoarelorCiobotaru AlexÎncă nu există evaluări
- Micro Hidro CentralaDocument7 paginiMicro Hidro CentralaCristian NituÎncă nu există evaluări
- Tipuri de Curent Si PolaritateDocument5 paginiTipuri de Curent Si PolaritateStefan LuchianÎncă nu există evaluări
- Pompe Cu PistonDocument24 paginiPompe Cu PistonemmanuelbahemukaÎncă nu există evaluări
- Caiet de Sarcini Rep Pompe CentrifugaleDocument24 paginiCaiet de Sarcini Rep Pompe CentrifugaleAugustaÎncă nu există evaluări
- Armament NuclearDocument7 paginiArmament NuclearLorena DanÎncă nu există evaluări
- Aparat de SuduraDocument2 paginiAparat de Suduradjboyy100% (1)
- Grile AhpDocument2 paginiGrile Ahpalin_the_00100% (1)
- Calcul Aripa RealaDocument19 paginiCalcul Aripa RealaAdn AdinaÎncă nu există evaluări
- MicrohidrocentraleDocument8 paginiMicrohidrocentraleGeorgianaÎncă nu există evaluări
- Acul Si BarosulDocument2 paginiAcul Si Barosuldanutza442Încă nu există evaluări
- Cercetari Magneti PermanentiDocument54 paginiCercetari Magneti PermanentiAnonymous WO9KSfNJ4aÎncă nu există evaluări
- Manual de Instrusctiuni Pompa SubmersibilaDocument8 paginiManual de Instrusctiuni Pompa SubmersibilaOana SarcaÎncă nu există evaluări
- Turbine Cu Abur - Suport de CursDocument24 paginiTurbine Cu Abur - Suport de CursMario Mro100% (4)
- Turbine Cu AburDocument81 paginiTurbine Cu AburGhiorghițanu Oana75% (4)
- TurbineDocument24 paginiTurbineValentin100% (1)
- Capitolul 2 R GabrielDocument33 paginiCapitolul 2 R Gabrielgabriel neaguÎncă nu există evaluări
- Turbina Francis1Document11 paginiTurbina Francis1George Molnar100% (1)
- m09 Chimfiz PDFDocument29 paginim09 Chimfiz PDFboctraian55Încă nu există evaluări
- Transformatoare ElectriceDocument15 paginiTransformatoare ElectriceDiana IacobÎncă nu există evaluări
- Constructia Si Function Area Releelor de Protectie Elect Rome CanDocument42 paginiConstructia Si Function Area Releelor de Protectie Elect Rome CancirlanÎncă nu există evaluări
- m09 Chimfiz PDFDocument29 paginim09 Chimfiz PDFboctraian55Încă nu există evaluări
- m09 Chimfiz PDFDocument29 paginim09 Chimfiz PDFboctraian55Încă nu există evaluări
- Capitolul 2Document59 paginiCapitolul 2NegreaDanielaÎncă nu există evaluări
- Suport de Curs ELECTRICIANDocument94 paginiSuport de Curs ELECTRICIANBebe Bucătaru87% (39)
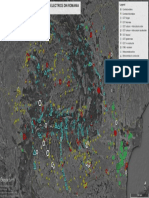
- Harta Unitatilor de Productie A Energiei Electrice Din RomaniaDocument1 paginăHarta Unitatilor de Productie A Energiei Electrice Din RomaniaNegreaDanielaÎncă nu există evaluări
- SISTEM DE AUTOMATIZARE Ha 1Document49 paginiSISTEM DE AUTOMATIZARE Ha 1NegreaDanielaÎncă nu există evaluări
- Electricieni ProblemeDocument19 paginiElectricieni ProblemeAncaOniscuÎncă nu există evaluări
- Rav Regulator Automat de VitezaDocument7 paginiRav Regulator Automat de VitezaNegreaDanielaÎncă nu există evaluări
- Laborator 004Document10 paginiLaborator 004NegreaDanielaÎncă nu există evaluări
- Codul Tehnic Al Retelelor Electrice de Transport - Revizia 1Document120 paginiCodul Tehnic Al Retelelor Electrice de Transport - Revizia 1Crenci Emil0% (1)
- Transformatoare ElectriceDocument15 paginiTransformatoare ElectriceDiana IacobÎncă nu există evaluări
- Prescriptii de Proiectare A Partii Electrice A Centralelor Si Statiilor VOL 2 - CIRCUITE SECUNDARE SI SERVICII PROPRIIDocument80 paginiPrescriptii de Proiectare A Partii Electrice A Centralelor Si Statiilor VOL 2 - CIRCUITE SECUNDARE SI SERVICII PROPRIIMoraru Marius Cristian100% (1)
- Stane ScuDocument5 paginiStane ScuDiana UMÎncă nu există evaluări
- Cheeeeeeee AutomatizareDocument43 paginiCheeeeeeee AutomatizareNegreaDanielaÎncă nu există evaluări
- Nti Tel R 005 2017 00 PDFDocument228 paginiNti Tel R 005 2017 00 PDFNegreaDanielaÎncă nu există evaluări
- Cap86PAG77 100Document24 paginiCap86PAG77 100GeorgeCristeÎncă nu există evaluări
- Cap86PAG77 100Document24 paginiCap86PAG77 100GeorgeCristeÎncă nu există evaluări
- Enunt Varianta A Varianta B Varianta CDocument37 paginiEnunt Varianta A Varianta B Varianta CNegreaDaniela100% (1)
- Model Cerere AngajatorDocument1 paginăModel Cerere AngajatorFlorin MariusÎncă nu există evaluări
- NORME TEHNICE Gr. 2 2017Document1 paginăNORME TEHNICE Gr. 2 2017NegreaDanielaÎncă nu există evaluări
- Manual de Exploatare Si Mentenanta PDFDocument1 paginăManual de Exploatare Si Mentenanta PDFNegreaDanielaÎncă nu există evaluări
- NORME TEHNICE Gr. 2 2017Document42 paginiNORME TEHNICE Gr. 2 2017Elisa Simona AntoceÎncă nu există evaluări
- Manual de Exploatare Si Mentenanta PDFDocument50 paginiManual de Exploatare Si Mentenanta PDFNegreaDanielaÎncă nu există evaluări
- New Microsoft Office Word DocumentDocument104 paginiNew Microsoft Office Word DocumentNegreaDanielaÎncă nu există evaluări
- Instalatie de Automatizare Pompe Epuisment PDFDocument1 paginăInstalatie de Automatizare Pompe Epuisment PDFNegreaDanielaÎncă nu există evaluări
- Instalatie de Masura Debite Infiltratie: AZEL Designing GroupDocument2 paginiInstalatie de Masura Debite Infiltratie: AZEL Designing GroupNegreaDanielaÎncă nu există evaluări