Documente Academic
Documente Profesional
Documente Cultură
Capitolul 3 - Estimatori - Gauss Markov
Încărcat de
Avram Lucia AlexandraTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Capitolul 3 - Estimatori - Gauss Markov
Încărcat de
Avram Lucia AlexandraDrepturi de autor:
Formate disponibile
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 24
CAPITOLUL III - ESTIMATORI
3.1. ESTIMATORUL GAUSS-MARKOV (METODA CELOR MAI MICI PATRATE)
3.1.1.Cazul General, forma ecuaiilor coreciilor:
n cazul msuratorilor indirecte, valoarea mrimilor care ne intereseaz se obine prin intermediul
unei (unor) mrimi msurate direct. Mrimile msurate direct i cele de determinat sunt funcional
dependente ntre ele.
Se va avea n vedere un ir de msurtori de forma
| |
T
0
n
0
2
0
1
o
, m , , m m m =
care sunt efectuate ntr-o
reea geodezic, deci nu asupra unei singure mrimi. Valorile medii ale unor mrimi sunt rezultate din
msuratori directe si X
1
, X
2
, , X
h
, aadar sunt determinate indirect.
Presupunem c ntre mrimile fizice msurate direct i parametrii
i
X de determinat, exist urmatoarele
dependente funcionale:
; ) , X , , X X ( F M
h 2 1 i
0
i
= unde: i = 1..n
(3.1)
Relaia (3.1) definete modelul funcional.
Problema care se pune este, ca din sistemul (3.1) s deducem valorile cele mai probabile (cele mai bune)
pentru ( )
h
X X X ,....., ,
2 1
. Determinarea valorilor cele mai probabile se face pe baza relaiei urmtoare :
;
T
h 2 1
] X , , X , [X = X
(3.2)
Un scop important al prelucrrii msurtorilor const n determinarea valorilor cele mai probabile care
cuprind, n primul rnd, parametrii de poziionare ai reelei geodezice n sistemul de coordonate
corespondent, dar i alte mrimi care intervin n prelucrare.
Dac valorile msurate direct
0
i
M nu ar fi afectate de erori, atunci sistemul (3.1) se poate scrie:
; ) , X , , X X ( F M
h 2 1 i
0
i
= unde: i = 1..n
(3.3)
unde: n reprezint numrul de msuratori efectuate,iar h reprezint numarul de necunoscute.
Se fac urmatoarele observatii:
- dac n < h atunci, din punct de vedere matematic, sistemul este nedeterminat deoarece din punct de
vedere geodezic, numrul de msuratori este insuficient pentru rezolvarea problemei.
- dac n = h atunci, din punct de vedere matematic sistemul este compatibil cu solutie unic deoarece
din punct de vedere geodezic, se msoara numai strictul necesar pentru rezolvarea problemei.
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 25
- dac n > h atunci, din punct de vedere matematic sistemul este incompatibil deoarece din punct de
vedere geodezic, datorit erorilor de msurare, sistemul devine incompatibil.
Astfel o caracteristic important a prelucrrilor msurtorilor geodezice este reprezentat de
faptul c numrul de msurtori M
o
, notat n, care intervine n calcule, este ntotdeauna mult mai mare
dect numrul parametrilor X , notat h:
n >> h
(3.4)
n practic,msurtorile efectuate sunt n mod inerent afectate de erori, indiferent de grija sau
priceperea operatorului , sau de condiiile bune asigurate pentru efectuarea msurtorilor.
Datorit erorilor de msurare, sistemul (3.1) este incompatibil, astfel nct mrimilor msurate trebuie s
li se aplice nite corecii
i
v . Dup aplicarea acestor corecii sistemul este compatibil cu necunoscutele
( )
h 2 1
X ,....., X , X .
Astfel sistemul (3.1) devine:
; ) , X , , X X ( F v M
h 2 1 i i
0
i
= + i = 1..n, n>h
(3.5)
unde :
h 1, = j x + X = X
n 1, = i M - M = v
j
*
j j
o
i i i
(3.6)
Sistemul (3.5) este compatibil dar ,n acelai timp, nedeterminat deoarece avem n ecuaii (n mrimi
cunoscute) si n+h necunoscute (n corecii aplicate mrimilor msurate i h corecii X aplicate
parametrilor determinai indirect). Prin urmare, n urma prelucrrii se vor determina dou iruri de
corecii: pentru msurtori i respectiv pentru necunoscute:
| |
| | . x , , x , x
;
T
u 2 1
T
=
=
x
v
n 2 1
, v , , v v
(3.7)
Valorile cele mai probabile ale coreciilor se determin aplicnd metoda celor mai mici ptrate.
3.1.2. Liniarizarea ecuaiilor coreciilor:
In general, relaiile (3.3) nu sunt de form liniar, totalitatea lor constituind aa-zisul model
funcional neliniarizat al compensrii msurtorilor geodezice prin metoda msurtorilor indirecte.
Aceste relaii depind de geometria intrinsec a reelei geodezice considerate, precum i de natura i tipul
msurtorilor geodezice care stau la baza determinrilor
Folosind relaiile (3.6), ecuaiile (3.3) se pot scrie mai dezvoltat sub urmtoarea forma:
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 26
( )
( )
( ),
h u 2 2 1 1 n n
0
n
h u 2 2 1 1 2 2
0
2
h u 2 2 1 1 1 1
0
1
x , X , x , X x X f v M
; x , X , x , X x X f v M
; x , X , x , X x X f v M
+ + + = +
+ + + = +
+ + + = +
- - -
- - -
- -
(3.8)
Compensarea devine astfel mai complicat de realizat astfel nct, pentru uurarea calculelor de
compensare, ecuaiile (3.8) se aproximeaz cu nite ecuaii liniare ce se obin prin dezvoltarea n serie
Taylor, n vecintatea unor valori
0
i
X , apropiate de cele adevrate.
Valorile probabile ale necunoscutelor vor fi deci:
x + X = X
j
*
j j
(3.9)
Coreciile x
j
trebuie s fie suficient de mici, astfel ca n dezvoltarea n serie s putem neglija termenii de
ordinul 2 i mai mari.
( ) ( ) ; x
X
F
x
X
F
x
X
F
, X , , X X F x , X , x , X x X F v M
h
h
i
2
2
i
1
1
i
h 2 1 i h h 2 2 1 1 i i
0
i
- - -
- - - - - -
|
|
.
|
\
|
c
c
+ +
|
|
.
|
\
|
c
c
+
|
|
.
|
\
|
c
c
+ ~ + + + = +
(3.10)
Relaia (3.10) reprezint forma liniarizat a ecuaiilor de condiie. Pentru a uura forma de scriere vom
nota:
2 1
i
h
i
i
i
i
i
h
X
F
; ; b
X
F
; a
X
F
=
|
|
.
|
\
|
c
c
=
|
|
.
|
\
|
c
c
=
|
|
.
|
\
|
c
c
- - -
(3.11)
( )
0
2 1 i i h i
M , X , , X X f =
- - -
(3.12)
Regula practic de calcul a termenului liber, li, este:
Termenul
liber
=
Valoarea
calculat
-
Valoarea
msurat
(3.13)
Relaiile (3.10) vor deveni cu ajutorul notaiilor (3.11) si (3.12):
.
n
+ + + + =
+ + + + =
+ + + + =
h n 2 n 1 n n
2 h 2 2 2 1 2 2
1 1 2 1 1 1 1
x u x b x a v
x u x b x a v
xh u x b x a v
(3.14)
Relaia (3.14) poart numele de sistemul liniar al ecuaiilor de corecii.
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 27
Modelul stochastic:
Vectorul mrimilor msurate este un vector n dimensional i, innd seama de relaia :
; ) , X , , X X ( F M
h 2 1 i
0
i
=
(3.15)
Rezult c matricea de varian covarian va avea forma:
|
|
|
.
|
\
|
o o o o o o o
o o o o o o o
o o o o o o o
= E
2
n 3 n 3 n 2 n 2 n 1 n 1 n
n 2 n 2 3 2 23
2
2 1 2 21
n 1 n 1 3 1 13 2 1 12
2
1
ll
(3.16)
n relaia (3.16) s-au folosit notaiile:
-
2
i
o - care este variana msurtorii
o
i
M si este :
) ( E
2
i
c = o
2
i
(3.17)
-
ij
- care este coeficientul de corelaie ntre mrimile
o
i
M si
o
j
M si este:
j i
ij
ij
o o
o
= si ( )
j i ij
E c c = o
(3.18)
Unde:
ij
o este covariana msurtorilor
o
i
M si
o
j
M
Trebuie menionat c n relaiile (3.17) si (3.18) termenul
i
c este definit uzual ca eroare adevrat.
Erorile adevrate sunt diferene ntre msurtorile
0
M i valorile lor adevarate M i se calculeaz cu
urmtoarea formul:
i
0
i i
M M = c
(3.19)
n cazul msurtorilor independente 0 =
ij
pentru j i, si j i = ,ceea ce nseamn c matricea de
varian covarian devine diagonal i anume:
|
|
|
.
|
\
|
o
o
o
= E
2
n
2
2
2
1
ll
0 0 0
0 0 0
0 0 0
(3.20)
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 28
Relaia (3.20) mai poate fi scris i sub urmtoarea form:
|
|
|
|
|
|
|
.
|
\
|
o
o
o
o
o
o
o = o = E
2
n
2
0
2
2
2
0
2
1
2
0
2
0 ll
2
0 ll
0 0 0
0 0 0
0 0 0
Q
(3.21)
innd cont c:
2
i
2
0
i
p
o
o
= , rezult c:
(3.22)
Dac msurtorile sunt independente i de aceeai precizie relaia (1.16) devine:
n , n
2
2
2
2
ll
I
0 0 0
0 0 0
0 0 0
o =
|
|
|
.
|
\
|
o
o
o
= E
(3.23)
unde: I Q
ll
=
Se fac urmtoarele observaii:
- fiecare msurtoare genereaz cte o ecuaie de corecie;
- din expresiile coeficienilor i termenilor liberi, se observ c mrimea msurat direct
o
i
M , deci cea
care este afectat de erori, intervine numai n termenul liber;
- din relaia (3.13) se deduce c eroarea termenului liber este egal cu eroarea mrimii msurate,
deoarece mrimile
i
X sunt nite constante. Rezult deci c eroarea unei ecuaii de corecie este egal cu
eroarea termenului liber a acesteia, coeficienii
i i i
h ,..., b , a putnd fi considerai nite constante lipsite de
erori.
- dac mrimile msurate
o
i
M , sunt determinate cu aceiai precizie i ecuaiile sistemului liniar al
coreciilor vor avea aceiai precizie. n caz contrar vom avea un sistem liniar al ecuaiilor de corecii
ponderat.
3.1.3. Rezolvarea sistemelor de ecuaii liniare:
Metodele de rezolvare a sistemelor de ecuaii liniare se mpart n dou grupe:
1. Metode exacte, care dau un algoritm finit pentru calculul soluiei (de exemplu regula lui Cramer
sau metoda eliminrii lui Gauss);
1
ll
Q P
=
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 29
2. Metode iterative, care permit s gsim soluia cu o eroare arbitrar mic (dar nenul), sub forma
unui ir convergent de vectori R
n
(unde n reprezint numrul ecuaiilor i al necunoscutelor din
sistemul dat), a crui construcie se face printr-un proces unic, numit proces de iteraie.
Desigur, metodele exacte nu dau soluia numeric dect cu aproximaie, n msura n care rezultatul unui
calcul simplu, de exemplu rezultatul mpririi unor numere prime ntre ele, nu se poate da dect cu
aproximaie orict de mic, dar nenul.
Metodele iterative sunt, de regul, simple i comode pentru folosirea mainilor de calcul. Dar fiecare
proces iterativ are un domeniu limitat de aplicare, deoarece un proces iterativ poate fi divergent pentru
un sistem dat, sau poate s convearg att de ncet nct s fie practic inutilizabil.
De regul, metodele iterative se aplic atunci cnd coeficienii diagonali ai sistemului sunt mai mari
n valoare absolut dect coeficienii nediagonali, convergena fiind asigurat n acest caz. Sistemele
normale, rezultate n procesul de compensare, se bucur n general de aceast caracteristic (mai ales n
cazul reelelor de nivelment).
Rezolvarea sistemelor de ecuaii normale cu un numr mare de necunoscute necesit calcule destul
de laborioase, iar erorile de calcul pot atinge valori apreciabile.
De aceea, caracteristicile i structura ecuaiilor normale, impun alegerea cu discernmnt a celor mai
adecvate metode de rezolvare.
Vom aborda a ecuatiilor liniare prin tratarea matriciala a masuratorilor indirecte cazurile masuratorilor
de aceiasi precizie si masuratorilor poderate.
3.1.4. Tratarea matriceal a msuratorilor indirecte.
3.1.4.1.Cazul msuratorilor de aceiai precizie.
3.1.4.1.1.Normalizarea sistemului liniar al escuatiilor de corectii:
Fie sistemul liniar al ecuaiilor de corecii :
i h i 2 i 1 i i
l x h ..... x b x a v + + + + = , i = 1..n, n>h
(3.24)
Notaii:
( )
|
|
|
.
|
\
|
=
n n n
2 2 2
1 1 1
h , n
h b a
h b a
h b a
A ; matricea coeficienilor sistemului de ecuaii de corecii,
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 30
( )
|
|
|
.
|
\
|
=
n
2
1
1 , n
v
v
v
V ; vectorul coreciilor sistemului de ecuaii de corecii,
( )
|
|
|
.
|
\
|
=
h
2
1
1 , h
x
x
x
x ; vectorul coreciilor aduse parametrilor determinai indirect,
( )
|
|
|
.
|
\
|
=
n
2
1
1 , n
l
l
l
L ; vectorul termenilor liberi,
(3.25)
Cu ajutorul notaiilor (3.25), din relaia (3.24) rezult c forma general a sistemului de ecuaii de
corecii va fi:
L Ax V + = (3.26)
Sistemul (3.26) este nedeterminat.Acesta se poate rezolva daca se foloseste conditia data de metoda
celor mai mici ptrate:
min V V
T
= (3.27)
Substituind in (3.27) valorile corectiilor date de relatia (3.26)
( ) ( ) min L Ax L Ax V V
T T
= + + = (3.28)
Efectuand derivata partiala in raport cu x:
0
x
V V
T
T
=
c
c
(3.29)
Rezulta:
( ) ( ) { } 0 A L Ax L Ax A
T T
= + + +
( ) 0 L Ax A 2
T
= +
Adica:
( ) 0 = + L A x A A
T T
(3.30)
Relaia (3.30) reprezint sistemul normal n cazul msurtorilor indirecte de aceiasi precizie.
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 31
3.1.4.1.2.Rezolvarea sistemului normal:
Rezolvarea sistemului normal se face astfel:
Notm:
A A N
T
= (3.31)
(3.31)- reprezint matricea normal a sistemului
Cu (3.31) i cu ajutorul relaiei (3.30) rezult:
(3.32)
(3.32) reprezint rezolvarea sistemului normal n cazul msurtorilor indirecte de aceiai precizie.
3.1.4.1.3.Determinarea marimilor compensate:
Coreciile se vor aplica mrimilor determinate indirect, mrimilor aproximative rezultnd mrimile
estimate:
i
*
i i
x X X + =
(3.33)
unde:
i
X - reprezint valori compensate
*
i
X - reprezint valori masurate
i
x - reprezint coreciile aplicate valorilor masurate.
Cu ajutorul valorilor determinate n relaia (3.33) se determin vectorul rezidurilor L Ax V + = , care se
aplic mrimilor msurate
0
i
M , rezultnd mrimile estimate ale acestora
i
M date de relaia:
(3.34)
3.1.4.1.4. Calculul preciziilor n cazul msurtorilor indirecte de aceiai precizie:
Evaluarea preciziilor se va face cu relaiile:
1. Eroarea medie ptratic a unei singure msurtori:
h n
V V
T
0
= o ; (3.35)
unde:
n reprezint numrul de ecuaii(numrul de msuratori);
h reprezint numrul de necunoscute.
L A N x
T 1
=
i
0
i i
v M M + =
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 32
2. Erorile medii ptratice ale necunoscutelor:
ii x 0 x
) Q (
i
o = o ;
(3.36)
unde Q- matricea cofactorilor:
1
N Q
=
(3.37)
3.1.4.2. Tratarea matriceal a msurtorilor indirecte. Cazul msurtorilor ponderate.
3.1.4.2.1.Normalizarea sistemului liniar al escuatiilor de corectii:
Fie sistemul liniar al ecuaiilor de corecii ponderat (de pondere p
i
):
i i h i 2 i 1 i i
p , l x h ..... x b x a v + + + + = , i = 1..n, n>h
(3.38)
Notaii:
; matricea coeficienilor sistemului de ecuaii de corecii,
; vectorul coreciilor sistemului de ecuaii de corecii,
; vectorul coreciilor aduse parametrilor determinai indirect,
; vectorul termenilor liberi,
; matricea ponderilor sistemului ecuaiilor de corecii.
(3.39)
Folosind notaiile (3.39), in relaia (3.38) rezult forma general a sistemului de ecuaii de corecii:
(3.40)
Sistemul (3.40) este nedeterminat.Acesta se poate rezolva dac se folosete condiia dat de metoda
celor mai mici ptrate:
( )
|
|
|
.
|
\
|
=
n n n
h n
h b a
h b a
h b a
A
2 2 2
1 1 1
,
( )
|
|
|
.
|
\
|
=
n
n
v
v
v
V
2
1
1 ,
( )
|
|
|
.
|
\
|
=
h
h
x
x
x
x
2
1
1 ,
( )
|
|
|
.
|
\
|
=
n
n
l
l
l
L
2
1
1 ,
( )
|
|
|
.
|
\
|
=
n
n n
p
p
p
P
0 0 0 0
0 0 0 0
0 0 0 0
2
1
,
L Ax V + =
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 33
(3.41)
Substituind n (3.41) valorile coreciilor date de relaia (3.40) rezult:
(3.42)
Efectund derivata parial n raport cu x :
(3.43)
Rezult:
Adic:
(3.44)
Relaia (3.44) reprezint sistemul normal n cazul msurtorilor indirecte ponderate.
3.1.4.2.2.Rezolvarea sistemului normal:
Rezolvarea sistemului normal se face astfel:
Notm:
( ) PA A N
T
=
Si (3.44) devine:
(3.45)
Relaia (3.45) reprezint rezolvarea sistemului normal n cazul msurtorilor indirecte ponderate.
3.1.4.2.3.Determinarea marimilor compensate:
Coreciile se vor aplica mrimilor determinate indirect, mrimilor aproximative rezultnd mrimile
estimate:
i
*
i i
x X X + =
(3.46)
unde:
i
X - reprezint valori compensate
min = PV V
T
( ) ( ) min = + + = L Ax P L Ax PV V
T T
0 =
c
c
T
T
x
PV V
( ) ( ) { } 0 = + + + PA L Ax L Ax P A
T T
( ) ( ) 0 = + + + L Ax P A L Ax P A
T T
( ) 0 = + PL A x PA A
T T
0 = + PL A Nx
T
0
1 1
= +
PL A N Nx N
T
PL A N x
T 1
=
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 34
*
i
X - reprezint valori masurate
i
x - reprezint coreciile aplicate valorilor masurate.
Cu ajutorul valorilor determinate n relaia (3.32) se determin vectorul rezidurilor L Ax V + = , care se
aplic mrimilor msurate
0
i
M , rezultnd mrimile estimate ale acestora
i
M date de relaia:
(3.47)
3.1.4.2.3. Calculul preciziilor n cazul msuratorilor indirecte ponderate:
Pentru evaluarea preciziilor se folosesc urmtoarele relaii:
1. Eroarea medie ptratic a unitaii de pondere:
h n
PV V
T
0
= o ; (3.48)
unde:
n reprezint numrul de ecuaii (numrul de msuratori);
h reprezint numrul de necunoscute.
2. Erorile medii ptratice ale necunoscutelor:
ii x x
Q
i
) (
0
o o = ;
(3.49)
unde : Q este matricea cofactorilor
1
= N Q
(3.50)
3. Eroarea medie ptratic a unei funcii de mrimi determinate indirect:
Fie funcia ( ) 0 ,....., ,
2 1
=
n
X X X F , unde parametrii
i
X reprezint mrimi determinate indirect.
Eroarea medie ptratic a acestei funcii este:
FF F
Q
0
o o = ; (3.51)
Unde:
f N f Q
T
FF
1
= ;
(3.52)
Iar vectorul
|
|
|
.
|
\
|
=
n
f
f
f
f
2
1
unde elementele
i
i
X
F
f
c
c
= .
i
0
i i
v M M + =
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 35
3.2. ESTIMATORI ROBUTI
3.2.1. Introducere i definiii:
Statistica robust ofer o altfel de abordare fa de clasicile metode de prelucrare statistice.
Scopul este de a determina estimatori care nu sunt nmod nejustificat afectai de micile abateri de la
ipotezele modelului.
n estimarea parametric se presupune c observaiile urmeaz un anumit model parametric
(funcional), numit model clasic sau model ideal. n aceast ipotez, au fost definite criterii de
optimalitate i au fost construii estimatori optimali, constituind aa numiii estimatori clasici (m.c.m.p).
Modelul clasic a fost readus n discuie n anii '50 cnd Tukey a evideniat deficiene ale estimatorilor
clasici n cazul unor modele contaminate (alterate). Astfel aceste modele clasice se bazeaza puternic pe
ipoteze teoretice (care nu sunt des intalnite npractica). nparticular se presupune ca erorile (corectiile)
datelor sunt distribuite normal sau macar aproximativ, dar din nefericire atunci cnd avem valori
extreme ndate metodele clasice dau rezultate slabe.
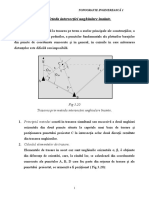
Fig 3.1. Prelucrare prin metoda celor mai mici patrate: opinie general asupra dispunerii punctelor.
Fig 3.2. Prelucrare printr-o metoda robust: opinie clar asupra dispunerii punctelor.
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 36
Erorile grosiere deseori se dovedesc a fi valori extreme (date avand corectii cu cel putin o clasa de
msura diferita de restul observatiilor), dar nu toate valorile extreme sunt erori grosiere.
Uneori unele date extreme sunt corecte (nu sunt afectate de erori grosolane) i pot pot fi cele mai
importante observatii din setul de date. Insasi aceste date extreme -date care nu se ncadreaz n modelul
stabilit de ctre majoritatea datelor- sunt un concept slab definit, fr limite clare; cu toate acestea sunt
un concept util atat timp cat nu se uita c exist o tranzitie continua la observaiile obinuite.
Rezulta ca este suficient o singura valoare grosier (extrem) coninuta nsetul initial de date
pentru a modifica rezultatele obinute n urma prelucrarii prin metoda celor mai mici patrate. De
exemplu, o singur valoare extrema poate face ca media de selecie s dea rezultate complet eronate.
Dac oricare din valorile de selecie tind ctre infinit, atunci media de selecie tinde ctre infinit. Spre
deosebire de media de selecie, mediana de selecie este mai puin afectat de prezena unei valori
aberante. Spunem c mediana este rezistent sau robust nprezena valorilor aberante, n timp ce media
de selecie nu are aceast proprietate. De fapt mediana va tolera pn la 50% valori aberante; spunem c
punctul su de ruptur este 50%, n timp ce punctul de ruptur al mediei de selecie este 0%. Dei media
de selecie este un estimator optimal al mediei repartiiei normale, ea poate fi substanial suboptimal
pentru repartiii apropiate de normal.
O reacie comuna la acest pericol este (subiectiva sau obiectiva) respingerea datelor extreme
dei, n principiu, datele extreme ar trebui s fie scoase temporar din model pentru o tratare separata.
Astfel putem spune ca nu ntotdeauna este indicat s se resping valorile extreme.
De ce nu este multumitor s controlam datele i s le inlaturam valorile extreme? Sunt mai multe aspecte
care trebuie luate nconsiderare:
1. Utilizatorii, chiar i expertii statisticieni nu controleaza intodeauna suficient de bine datele.
2. Decizia de a pstra sau de a respinge o observaie poate s nu fie cea mai bun solutie, mai
indicat fiind s se atribuie observailor suspecte ponderi mai mici. De exemplu, dat fiind un set
de date normale printre care se afl i valori aberante, datele filtrate dup o anumit regul nu vor
fi neaprat normale (pot exista false respingeri, sau false reineri) i situaia poate deveni chiar
mai rea dect cea iniial (putem trage concluzii false sau se poate ca reteaua geodezica sa ajunga
la un defect de configuratie). Astfel teoria clasic nu este aplicabil seleciei "curate".
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 37
3. Poate fi dificil sau imposibil depistarea datelor extreme ndate foarte variate (distane, direcii,
unghiuri zenitale-msuratori eterogene) sau foarte structurate (multidimensionale);
4. Respingerea datelor extreme afecteaza teoria distribuiei care ar trebui s fie modificata. n
particular deosebirile vor fi subestimate din datele curatate.
Este un fapt cunoscut c cele mai bune proceduri de detectare-respingere a valorilor aberante nu ating
performana celor mai bune proceduri robuste de estimare.
Fig 3.3. Diferite moduri de analizare a datelor.
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 38
3.2.2. Caracteristicile estimatorilor robuti i msuri ale robusteii:
3.2.2.1. Caracteristicile unei proceduri robuste de estimare:
S-a pus aadar problema construciei unor estimatori, numii robuti, care s fie ct mai puin sensibili la
anumite deviaii de la un model ideal. Dorim ca prin cuvntul "robust" s ne referim la acele abordari
calitativ bune ce urmeaz s fie stabilite ale estimaiilor parametrilor, chiar n cazul n care ipotezele
modelului metodei celor mai mici ptrate nu sunt ndeplinite.
Caracteristicile unei proceduri robuste de estimare dup CASPARY (1988) sunt urmtoarele:
Distributia este robusta. Adic trebuie s fie conceputa s piard din eficien ct mai puin
posibil n apropierea unui model stocastic.
Estimarea datelor ar trebui s fie robusta adic rezultatele trebuie s fie cat mai apropiate de
valorile adevarate ale parametrilor, s existe efecte de rotunjire n cazul n care intre date se afla
inexactitati sau erori grosiere. Rezultatele sunt, prin urmare, ct mai puin posibil influentate de datele
"rele"
Modelul de estimare trebuie s fie robust, ceea ce nseamn c parametrii estimati trebuie s se
bazeze n principal pe datele modelului conform, prin urmare i influena modelului (punctelor) slabe se
va atenua.
Estimatorul are o mare capacitate de separare, ceea ce nseamn erorile grosiere i punctele
slabe din model ar trebui s evidente. De exemplu, ar trebui s fie considerate "bune" observaiile cu
corectii mici, i "proste" atunci cnd sunt identificate corectii mari.
n cele din urm, un estimator robust ce abordezeaza un model corect i observaii aproape
perfecte trebuie ca rezultatele acestuia s fie optime, adic rezultatele s fie identice cu cele rezultate
dac prelucrarea se realizeaza prin metoda celor mai mici patrate.
3.2.2.2. Msuri ale robusteii:
Dei problema robusteei este veche, primele abordri teoretice n domeniul statisticii robuste sunt
datorate lui Huber i lui Hampel. Cercetrile celor doi autori au condus la definirea unor concepte
fundamentale n estimarea (statistica) robust, cele mai des utilizate fiind funcia de influen i punctul
de ruptur. De asemenea, rezultatele lor teoretice au oferit bazele estimarii robustificrii metodelor
parametrice clasice.Robusteea unui estimator se poate msura cu ajutorul funciei de infulenta,
punctului de rupere, i a funciei de erori.
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 39
3.2.2.2.1.Funcia de influen (IF): dup cum i indic numele, este o msur a influenei pe care o
observaie o are asupra parametrilor estimai.
n vederea obinerii celui mai important model pentru funcia de influen, se va porni de la
urmtorul raionament: cele (n - 1) variabile aleatoare X
i
(i = 1, 2 .... n - 1) posed funcia empiric de
distribuie F
n-1
. Funcia de estimare pentru aceste (n - 1) variabile aleatoare, este
T
n-1
= T (F
n-1
) = t
n-1
(X
1
, X
2
..... X
n
)
(3.53)
Pentru acest estimator, se va adauga o alt variabil aleatoare X cu funcie de distribuie o
x
necunoscuta.
Astfel, rezult noua funcie de estimare:
T
n
= T (F
n
) = t (X
1
,X
2
,...,X
n
)
(3.54)
Funciile empirice de distribuie F
n
sunt suma distribuiilor individuale:
x
n
1
F
n
1 n
F
1 n n
o +
=
(3.55)
Acum, n termeni generali, va fi descris efectul asupra funciei de estimare, care este generat prin
adugarea doar a unei observaiei X
n
. Acest efect este descris de curba de sensibilitate (sensitivity curve)
SC, care se obine din diferena dintre cele dou funcii de estimare T
n
i T
n-1
i nmulirea cu n:
n
F T x
n
F
n
n
T
T T n SC
n n
n n n
1
) ( )
1 1
(
) (
1
1 1
+
= =
o
(3.56)
Dac n i 1/n este nlocuit de o valoare mic c, rezulta clar din (3.56) funcia de influen IF
(influence funcion) al estimatorului T dup Hampel i alii (1986):
c
co + c
=
c
) F ( T ) x F ) ( T
lim ) F , T , x ( IF
i
1
(3.57)
Aceast funcie de influen acord pentru un anumit estimator T ca efect o modificare infinitezimal n
datele x din estimator i este o funcie riguros teoretic ,dar o metod abstract de a se face distincia
ntre estimatori. Din punct de vedere al erorilor grosiere numai funciile de estimare, ale cror funcii
de influen sunt limitate, vor conduce la estimatori robuti.Cu alte cuvinte, se deduce c influena unei
erori brute dintr-un estimator robust este limitat.
n figura de mai jos sunt reprezentate grafic funcii de influen pentru estimatori tipici. Acesti
estimatori sunt: media aritmetica, mediana i estimatorul Huber. Pentru media aritmetic a
msurtorilor, influena unei erori n date este n acest caz monoton i nelimitat. Pentru median,
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 40
funcia de influen este monoton i limitat. De asemenea, i pentru estimatorii Huber, exist o funcie
de influen limitat i monoton.
Fig 3.4. Principalele tipuri de funcii de influen dup Wicki F. (1999).
Modul de calcul a funciei de influen, n sine, este evaluat de exemplu de ctre Wicki (1999)
pentru media aritmetic:
Pentru x standardizat i distribuit normal densitatea de probabilitate (x), precum i funcia de
distribuie | (x) este:
=
= = =
n
1 i
i n
x
n
1
T ) x ( E x
(3.58)
Pentru n, aceast ecuaie devine:
}
+
= = = 0 ) ( ) ( dx x x T x E
n
(3.59)
Astfel funcia de influen (3.57) evideniaz
x
dx ) x ( x ) x ( x xd dx ) x ( x ) 1 (
lim
du ) x ( x ) F ( T ) u )( x ) 1 (( xd
lim ) F , T , x ( IF
i
=
c
o + c
=
=
c
+ co + u c
=
} } } }
} }
c
c
(3.60)
c influena unei singure observaii care crete liniar cu mrimea erorii, are importanta asupra estimaiei
parametrilor, ceea ce reprezint un semn al lipsei de robustee a metodei.
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 41
3.2.2.2.2. Punctul de rupere: este proporia ncare un estimator poate tolera observaiile incorecte
inainte de a da un rezultat aberant. Cu ct punctul de rupere al unui estimator este mai mare cu att
acesta este considerat mai robust. n general, putem considera c punctul de rupere nu poate depsi
valoarea de 50% deoarece dac mai mult de jumatate din observaii sunt alterate nu este posibil
distingerea distribuiei normale de distribuia contaminat (alterat). Punctul de rupere BP este, prin
urmare, o msur globala a robusteii (de fiabilitate); este de multe ori primul i cel mai important
criteriu de luat nconsiderare nainte de a intra n detalii privind proprietile robusteii locale.
3.2.2.2.3. Funciile de erori:
Un alt parametru important este funcia de erori, care se dovedete a fi un instrument just de evaluare
a estimatorilor. Pentru observaiile compensate (valori cele mai probabile)
i
, n conformitate cu
consideraiile anterioare :
i i i
v l l
+ = . (3.61)
Unde au fost introduse coreciile v
i
, avnd n vedere c valoarea real a observaiilor l
i
, nu satisface
modelul funcional.
Pentru a determina coreciile v
i
trebuie introdus o funcie de estimare bine definit. Ca mrime noua
este introdus acum eroarea unei funcii de estimare. Funcia de erori (v
i
) este definit ca fiind abaterea
unui estimator din cutarea rezultatelor optime de estimare.
Funcii de erori comune sunt:
- Funcia de erori Gaussian . Prin minimizarea sumei acestei funcii de erori se ajunge
(pierdere) se reduce la metoda celor mai mici ptrate.
2
) (
i i
v v =
(3.62)
- Minimizarea sumei acestei funcii de erori se reduce la ntreaga clas de Ls-norm-
estimri.
2
) (
i i
v v =
(3.63)
Aceasta duce la metoda modulelor minime (norma octoedrica).
- Minimizarea sumei acestei funcii de erori duce la estimatorul Huber
>
<
=
k v pentru v k
k v pentru v
) v (
i i
i
2
i
i
(3.64)
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 42
3.2.3. Modelul estimarii robuste ale parametrilor :
3.2.3.1. Modelul stochastic:
Se presupune c erorile observaiilor sunt distribuite n mod normal:
F(x)~N(0,o
2
) (3.65)
Funcia de distribuie este valabil n cazul n care msurtorile:
-sunt lipsite de erori grosolane
-nu sunt influenate de erori sistematice
-modelul funcional este corect
Numai ncondiii ideale aceste ipoteze sunt valabile aa cum au demonstrat diverse studii.
Pentru distribuia normal sau n apropierea de distribuia normal de la baza observaiilor, metoda
celor mai mici ptrate furnizeaz cele mai bune estimri (a se vedea capitolul 3 gauss-markov),
nschimb dac observatiile contin erori grosolane acestea duc la o distribuie ce difer n mod
semnificativ de distribuia normal. Pentru observaii distribuite normal, mai puin riguroase, se justifica
tratarea (compensarea) cu ajutorul estimatorilor robusti.
Cei mai muli estimatori robuti sunt derivai din (3.55) i (3.57) consolidai de ipoteza distribuiei:
) ( ) ( ) 1 ( ) ( x S x G x F c c + =
(3.66)
Acest model prevede c majoritatea incertitudinilor de msurare ale unui model de distribuie G(x)
aparin de distribuia normal; pentru o mica parte a incertitudinilor de msurare exista o divizie
Strver S(x), care de obicei, rmne necunoscuta.
3.2.3.2. Derivarea funciei de estimare:
Vom prezenta principiul de derivare a unui estimator, fcnd paralela la metoda convenionala a
celor mai mici ptrate cu ajutorul funciei de erori Gaussian dup relaia:
2
) (
i i
v v =
(3.67)
Lum un caz unidimesional al unui estimator al unor parametrii :
) ,... , (
2 1 n
X X X t X =
(3.68)
i rezult funcia erorilor:
2 2
) ( ) ( ) (
i i i i
v X X X X v = = =
(3.69)
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 43
Aceasta se numete funcia erorilor a lui Gauss, ducnd la minimizarea erorilor:
min ) v ( ) X X ( ) v (
n
1 i
2
i
n
1 i
2
i i
= = ,
= =
(3.70)
Pentru a rezolva aceast problema se considera prima derivata zero rezultand relatiile:
0 ) X X ( 2
n
1 i
i
=
=
Sau 0 ) X X (
n
1 i
i
=
=
Ca soluie, s-a introdus simpla formul de determinare a mediei aritmetice:
=
=
n
1 i
i
X
n
1
X
(3.71)
n cazuri multidimensionale nconformitate cu modelul liniar clasic, cu observaii de aceiasi precizie
sistemul ecuaiilor de corecii este liniarizat fiind de forma:
L X A V + = (3.72)
de unde se deduce pentru i observaii independente:
=
=
n
1 i
j j ij i
l x a v
(3.73)
Rezultand forma generala a ecuatiei de corectie (gauss-markov).
La fel ca n cazul unidimensional se cere ca suma acestor corectii mbuntite s tinda la minim.Pentru
a determina minimul se va calcula prima derivat a funciei erorilor, care va forma funcia :
i
i
i i
v
) v (
) v ( ' ) v (
c
c
= =
(3.74)
Mrimile variabile reale din modelul liniar sunt parametri x, astfel atunci cnd funcia tinde la minim
rezulta:
0
x
v
) v (
x
v
v
) v (
x
) v (
n
1 i j
i
i
j
i
n
1 i i
i
n
1 i j
i
=
c
c
=
c
c
c
c
=
c
c
= = =
(3.75)
Avand nvedere L X A V + = vom avea :
0 a ) v (
n
1 i
ij i
=
=
(3.76)
n relaia de mai sus introducnd a
i
= [a
1
, a
2
... a
n
] ca un rnd vector din matricea A :
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 44
0 a ) v (
n
1 i
i i
=
=
(3.77)
Prin trecerea la modul de scriere matriceal sistemul de normalizare va fi:
0 A
T
=
(3.78)
n cazul n care funcia vectorial este introdus:
0 )] (v .... ) (v ) (v [ =
n 2 1
=
(3.79)
n continuare se considera funcia Gaussian 2 / v ) v (
2
i i
= usor modificat, urmnd s se determine
prima derivata a acestei funcii :
i i
v ) (v =
(3.80)
Din (3.78), rezult direct :
0 V A
T
= (3.81)
i prin introducerea n modelul liniar L X A V + = , se ajunge la forma ecuaiilor normale cunoscute :
L A AX A
0 ) 1 Ax ( A
T T
T
=
=
(3.82)
Prin acest mod de abordare, prin urmare, rezult cazurile unidimensionale sau multidimensionale ale
formulelor cunoscute, n cazul n care este utilizat ecuaia de erori Gaussian.
3.2.4.Clasificarea estimatoriilor robuti:
Estimatorii robuti pot fi clasificati dup cum urmeaz:
- estimatorii M sau estimatorii de probabilitate maxim.
- estimatorii L sau estimatorii de combinatie liniara de ordine statistica.
- estimatorii R sau estimatorii derivati din testul de rang.
Printre ei estimatorii M sunt cei mai flexibili i mai uor de a generat pentru cazurile parametrilor
multipli. Acesta este motivul pentru care sunt cei mai frecvent utilizati.
Estimatorii M sunt estimatori de parametri nrudii cu binecunoscutul estimator bazat pe metoda
celor mai mici ptrate, dar cu robustee mbuntit n prezena erorilor grosiere prezente n date.
Cei mai cunoscuti dintre estimatorii sunt:
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 45
- L
p
- -norm: ca, de exemplu, L
1
- pe care Laplace l-a propus s se utilizeze cu mult timp n urm
dar care nu este stabil , poate reduce influenta valorilor extreme dar acestea au inca influenta deoarece
funcia de influenta nu are puncte de rupere, i L
2
- care, de fapt, este foarte puin robust;
- estimatorul L
1
-L
2
imprumuta de la estimatorul L
1
capacitatea de a reduce influenta erorilor mari
i de la estimatorul L
2
proprietatea de a fi convex;
- estimatorul Huber
- estimatorul Andrews
- altele: estimatorii Geman-McClure, Tukey&Welsch .
Tab.3.1 Principalii estimatori robuti i funciile lor de erori:
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 46
3.2.5. Estimatorii M :
Estimatorii M pot reduce efectul valorilor extreme inlocuind corectiile luate la ptrat din expresia
clasic a metodei celor mai mici ptrate cu o alt funcie de corectii, E
i
(vi) unde (vi) este o funcie
simetric pozitiv definit, cu un minim unic n origine i cu o cretere mai lent dect ptratul.
n general, se caut prin estimatorul M o funcie de estimare de n observaii L
1
,L
2
.... L
n
:
T
i
= L
i
(L
i
, L
2
..... L
n
),
(3.83)
astfel nct suma ecuaiilor de erori s fie minim:
min ) L L ( ) v (
n
1 i
i i
=
=
(3.84)
Printr-o alegere adecvat a unei funcii de erori (vi) se obin proprietile dorite ale procedurii de
estimare. Pentru a evalua proprietile unei funcii de erori trebuie s se determine i s se discute funcia
de influen.
Potrivit lui Hampel (1986) i lui Borutta (1988) funcia de influen de u-dimensiuni pentru
estimatorul M este descris prin relaia:
) v ( a S ) G , x , I
, A ( IF
i
T
i
1
l i
= =
(3.85)
unde: YA A S
T
l
=
cu ))]. (v ' ( E ... )) (v ' ( E )) (v ' ( [E diag = Y
n 2 1
Linia a
i
corespunde celor i observaii Li, ce are influen asupra vectorului de necunoscute x.
Funcia adic prima derivat a funciei de erori n urma aplicrii coreciilor prin estimatorul
M, este proporional cu funcia de influen (Hampel, 1986). Deoarece funcia de influen sau
funcia este limitat, ne va rezulta estimatorul robust. Acest lucru ne permite o evitare a discuiei
privind proprietile robuste ale funciei de erori datorita funciei a sa i determinarii explicite a
funciei de influen.
Pentru o distribuie ipotetic a probabiliti:
(x) S + (x) G ) - (1 = (x) F c c
(3.86)
adic tulpina distribuiei, G (x) ~ N(0,
2
) precum i o abatere de la distributie S datorata unui numr
mic de valori extreme, determina o funcie de erori continu i convex, pentru care printr-o alegere
corespunztoare a valorii lui k vor rezulta caracteristici robuste:
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 47
>
<
=
k v pentru k
2
1
v k
k v pentru v
2
1
) v (
i
2
i
i
2
i
i K
(3.87)
Derivata funciei de erori, adic funcia , ale cror proprieti pot fi considerate chiar cele ale funciei
de influen , este:
>
<
=
k v pentru k v
k v pentru v
) v (
i i
i i
i K
(3.88)
Wicki (1999), a fcut legtura dintre funcia i coreciilor standardizate w
i
= v
i
/
vi
cu ajutorul
estimatorului BIBER dezvoltat de ctre acesta, care mpreuna cu metoda celor mai mici ptrate a devenit
baza detectarii erorilor grosiere. n funcie de calitatea observaiilor pentru k va corespunde un interval
de 2,5 < k < 4 .
Fig. 3.5. Funcia de erori (v
i
) i prima derivat a estimatorului Huber
3.2.6. Estimatorii L :
Clasa aa-numiilor estimatori L este definit ca o combinare liniar a ordinului statisticilor, adic
valorile msurate sunt sortate n funcie de mrimea lor. Pentru n variabile corespunde urmtorul
eantion ordonat :
L
(1)
<L
(2)
<...<L
(i)
<L
(n)
(3.89)
unde L
(i)
, este desemnat al i -lea, pentru ordinului statisticilor.
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 48
Estimatorul L este de tip:
=
= =
n
1 i
i i n 2 1
L a ) L ,... L , L ( t L
(3.90)
unde pentru suma ponerilor avem relaia:
=
=
n
1 i
i
1 a
(3.91)
n cazul unidimensional se deduc imediat dou estimri:
media aritmetic :
) L ... L L (
n
1
L
n
1
a
n 2 1 i
+ + + = =
(3.92)
estimarea Chebychev :
2
) L L (
L
2
1
a a
n 1
n i
+
= = =
(3.93)
Aceste dou metode de estimare nu sunt robuste, deoarece influena observaiilor extreme nu este
limitat.
n schimb, vom obine o estimare foarte robust - mediana, folosind numai valorile medii msurate:
|
|
.
|
+ +
\
|
= = + =
+
= =
+
) 1
2
n
( L )
2
n
( L
2
1
L
2
1
) 1
2
n
( a )
2
n
( a par n
)
2
1 n
( L L 1 )
2
1 n
( a impar n
(3.94)
Funcia de influen a medianelor este prezentat n Figura 13.
3.2.6.1 Estimatorul Ls:
O funcie de erori poate fi ales n principiu ca poten arbitrar s din |v
i
|, estimatorul Ls are funcia
de erori de forma:
(v
i
) = |v
i
|
S
(3.95)
se deduce pentru prima derivat cu ajutorul careia se va forma funcia :
2 s
i i i
v sv ) v (
=
(3.96)
i pentru ecuaiile normale:
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 49
=
n
1 i
ij
2 s
i i
0 a v v
(3.97)
Din (3.97) se observ c funcia este limitat numai pentru 1 <s <2 i, prin urmare, numai n acest
domeniu, pot fi determinai estimatori robuti.
Pentru s = 2 rezult nerobustul estimatorul L2. cu formula :
i i
2
i i
v 2 ) v (
v ) v (
=
=
(3.98)
Pentru ecuaia normal rezult din (3.97) vom avea:
=
=
n
1 i
ij i
0 a v
(3.99)
Relaie care poate fi scrisa cu formulele uzuale:
0 = v A
T
Sau 0 = 1 A - x A A
T T
(3.100)
Estimatorul L2 corespunde cu modul de abordare a metodei celor mai mici ptrate. Funcia este o
linie dreapt, astfel, - dup cum este menionat mai sus - nu are limit deci parametrul de estimare nu
este robust.
Ca o alternativ robust, a fost introdus mai devreme estimatorul L1 n geodezie (Fuchs, 1980;
Caspary, 1988; Kampmann, 1986). n acest caz funcia i funcia de eroare sunt :
i i
i i
signv ) v (
v ) v (
=
=
(3.101)
Pentru estimatorul L1 avem:
= =
=
n
1 i
i
n
1 i
i
min v ) v (
(3.102)
Estimatorul L1 conine o funcie limitat i, prin urmare, este clar robust.
3.2.6.1.1.Metoda modulelor minime (L
1
):
Metoda modulelor minime poate fi redus la o aplicaie iterativ a metodei celor mai mici ptrate astfel:
- Se impune condiia:
=
n
1 i
i
im min v
(3.103)
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 50
n metoda celor mai mici ptrate avem condiia:
=
n
1 i
2
i
im min v
(3.104)
Dificultatea metodei modulelor minime const n faptul c intervin calcule cu module. Pentru a elimina
acest inconvenient se poate face urmtorul artificiu:
-se nmulete i se mparte relaia (3.104) cu
i
v i vom avem:
im min
v
v v
v
n
1 i i
i i
n
1 i
i
=
= =
(3.105)
Sau:
im min p v v
n
1 i
i
2
i
n
1 i
i
=
= =
(3.106)
unde s-a notat :
i
i
v
1
p =
(3.107)
deci metoda modulelor minime a fost transformat n metoda celor mai mici ptrate.
Condiia:
im min v v
n
1 i
i
=
=
(3.108)
se numete norm octoedric i nu este o funcie liniar de argumente
i
v .
Totui problema gsirii minimului v se poate transforma astfel nct s devin o problem de
programare convex liniar pe poriuni, iar determinarea celei mai bune aproximri se poate face prin
una din metodele programrii liniare.Din acest motiv metoda poate fi utilizat cu succes la depistarea
erorilor mari(erori grosolane).
Problema minimalizrii sumei modulelor abaterilor poate fi redus (printr-un artificiu relativ
simplu), la aplicarea iterativ a metodei celor mai mici ptrate.
Estimatorul obinut prin metoda minimalizrii sumei are calitile unui estimator robust. Din acest motiv
metoda poate fi utilizat cu succes la depistarea valorilor extreme (erori grosolane).
Dac funcia de repartiie a abaterilor v este de forma:
o
o
=
v
i
e
2
1
) v ( f
(3.109)
atunci, aplicnd principiul verosimilitii maxime, cea mai bun aproximare a parametrilor va fi cnd:
LUCRARE DE DIPLOM AVRAM LUCIA ALEXANDRA
Page 51
=
n
1 i
i
im min v
(3.110)
deci o estimare prin metoda modulelor minime.
Procedura poate fi rezumata dup cum urmeaz :
1) Se consider n prima iteraie 1 p
i
= (sau ponderea estimat apriori), se aplica metoda celor mai mici
patrate i se deduc necunoscutele i coreciile
) 1 (
i
v ;
2) n iteraia a doua cu ajutorul corectiilor obinute n urma prelucrarii ponderile sunt recalculate cu
ajutorul relatiei
) 1 (
i
i
v
1
p = ;
3) O nou prelucarea prin metoda celor mai mici patrate se realizeaz mpreun cu noile ponderi
rezultnd noi valori pentru necunoscute i
) 2 (
i
v ; Apoi, s revine la pasul 2 i se continu iteraiile pn
cnd procesul se stabilizeaz (se obin aproximativ aceleai corecii). Ponderile trebuie evaluate dup
fiecare iteraie pentru a fi utilizate n iteraia urmtoare.
n general sunt suficiente 3-6 iteraii
Fig. 3.6. Funcia de erori i funcia pentru estimatorii L1 i L2
S-ar putea să vă placă și
- Gauss MarkovDocument17 paginiGauss MarkovAndrei Cezar OicaÎncă nu există evaluări
- Orientarea AbsolutaDocument3 paginiOrientarea AbsolutaRazvanÎncă nu există evaluări
- Compensarea Masuratorilor Si Statistica MDocument62 paginiCompensarea Masuratorilor Si Statistica MBitan Gabriel CatalinÎncă nu există evaluări
- Geode ZieDocument34 paginiGeode ZieMihai LunguÎncă nu există evaluări
- Planul Topografic TemaDocument12 paginiPlanul Topografic TemaAlinaÎncă nu există evaluări
- Putere Si Politica in OrganizatiiDocument5 paginiPutere Si Politica in OrganizatiizanrazÎncă nu există evaluări
- Model Carnet de TerenDocument2 paginiModel Carnet de Terentopograf_3xforum100% (1)
- Analiza Multicriteriala IDocument15 paginiAnaliza Multicriteriala IAlex AntofieÎncă nu există evaluări
- Curs 2Document10 paginiCurs 2Buciuman MariusÎncă nu există evaluări
- Teoria Erorilor de Masurare Si Metoda Celor Mai Mici PatrateDocument134 paginiTeoria Erorilor de Masurare Si Metoda Celor Mai Mici Patratemihai37Încă nu există evaluări
- Date Constructive Despre Cladiri Si Anexe Cu Care Se Completeaza Fisa Bunului ImobilDocument5 paginiDate Constructive Despre Cladiri Si Anexe Cu Care Se Completeaza Fisa Bunului ImobilAncaMironaConstantinescuÎncă nu există evaluări
- Calcule Topografice in CadastruDocument27 paginiCalcule Topografice in CadastruAlexinNo JblÎncă nu există evaluări
- Parametrii Elipsoidului de RotatieDocument4 paginiParametrii Elipsoidului de RotatieefimÎncă nu există evaluări
- Tema 4Document6 paginiTema 4efim100% (1)
- Referat Metode StatisticeDocument14 paginiReferat Metode StatisticeVHGRUP AchizitiiÎncă nu există evaluări
- Metode Geodezie MatematicaDocument43 paginiMetode Geodezie MatematicaAndreea100% (1)
- ProiectDocument69 paginiProiectBuse CatalinÎncă nu există evaluări
- Proiect de Curs - Geodezia InginereascaDocument38 paginiProiect de Curs - Geodezia InginereascaValera RotaruÎncă nu există evaluări
- Curs 6-14Document74 paginiCurs 6-14ValyValiusaÎncă nu există evaluări
- Calcule DrumuireDocument4 paginiCalcule DrumuireIonut Si DanielaÎncă nu există evaluări
- Topografie InginereascaDocument117 paginiTopografie InginereascaamariemihaiÎncă nu există evaluări
- Fotogrametria AerianaDocument1 paginăFotogrametria AerianaLucian Florin Blaga0% (1)
- Aspecte Ale Prelucrării Măsurătorilor GeodeziceDocument14 paginiAspecte Ale Prelucrării Măsurătorilor Geodeziceflorin serafin100% (1)
- IoanaDocument7 paginiIoanaAndra DanielÎncă nu există evaluări
- Principiul TriangulatieiDocument10 paginiPrincipiul TriangulatieiPirvu IuriiÎncă nu există evaluări
- Aparatura Utilizata La Masurarea Unghiurilor Si DistantelorDocument18 paginiAparatura Utilizata La Masurarea Unghiurilor Si DistantelorMaria NichitaÎncă nu există evaluări
- Modelul Numeric Al TerenuluiDocument12 paginiModelul Numeric Al TerenuluiMaria Mihai AlexandruÎncă nu există evaluări
- TopografieDocument62 paginiTopografieIgor PestereanÎncă nu există evaluări
- NivelmentDocument68 paginiNivelmentDaniela RaduÎncă nu există evaluări
- Etapele Documentarii AdministrativeDocument2 paginiEtapele Documentarii AdministrativeElena Mihaela OprinaÎncă nu există evaluări
- TopografieDocument368 paginiTopografienicollette_crzÎncă nu există evaluări
- Topo 2Document140 paginiTopo 2Ungureanu CristianÎncă nu există evaluări
- Tema 12Document15 paginiTema 12Mihai GrecuÎncă nu există evaluări
- FotogrammetrieDocument24 paginiFotogrammetrieDaniela Carmen Popa50% (2)
- Lucrarea 10 TCMDocument9 paginiLucrarea 10 TCMDontu AlexandruÎncă nu există evaluări
- AM II CadastruDocument119 paginiAM II CadastruAlexandra SimionescuÎncă nu există evaluări
- Topografie - Subiecte LicentaDocument58 paginiTopografie - Subiecte LicentaRenato N CentrifugÎncă nu există evaluări
- 1.6drumuire NiveliticaDocument6 pagini1.6drumuire Niveliticamateialexioan0% (1)
- Excesul Sferic Al Unui Triunghi Elipsoidic MicDocument3 paginiExcesul Sferic Al Unui Triunghi Elipsoidic MicArdelean PaulÎncă nu există evaluări
- Automatizarea Lucrarilor Topografice PDFDocument45 paginiAutomatizarea Lucrarilor Topografice PDFDumitru Botnaru50% (2)
- Evaluarea Calitativă A Produselor SoftwareDocument40 paginiEvaluarea Calitativă A Produselor SoftwareAroiu PaulÎncă nu există evaluări
- Topografie InginereascaDocument100 paginiTopografie InginereascaCatalin GabrusÎncă nu există evaluări
- Cap-6-Masurarea Unghiurilor PDFDocument13 paginiCap-6-Masurarea Unghiurilor PDFVioleta PopaÎncă nu există evaluări
- Examen GIS - Semestrul I PDFDocument1 paginăExamen GIS - Semestrul I PDFOcneanuElenaÎncă nu există evaluări
- Planuri Si Harti TopograficeDocument19 paginiPlanuri Si Harti TopograficeAndreea AlexandraÎncă nu există evaluări
- Modelarea Digitală A TerenuluiDocument8 paginiModelarea Digitală A TerenuluiMarcela HandroÎncă nu există evaluări
- Topografie - Masurarile TerestreDocument65 paginiTopografie - Masurarile TerestreTomasevschi Zinaida100% (1)
- Analiza DatelorDocument27 paginiAnaliza DatelorAda C.Încă nu există evaluări
- Lucrare de An - Topografie Inginereasca IIDocument30 paginiLucrare de An - Topografie Inginereasca IIЛёш-КаÎncă nu există evaluări
- Cadastru 1Document35 paginiCadastru 1Timur MironÎncă nu există evaluări
- Metoda de Colectare A DatelorDocument4 paginiMetoda de Colectare A DatelorCosmin SpînuÎncă nu există evaluări
- Erori de MasurareDocument15 paginiErori de MasurareIonut-Razvan PanaÎncă nu există evaluări
- Cadastru ProiectDocument10 paginiCadastru ProiectFlavius-Andrei FecioruÎncă nu există evaluări
- Compensarea MasuratorilorDocument3 paginiCompensarea MasuratorilorAndrei MariusÎncă nu există evaluări
- Teoria SistemelorDocument169 paginiTeoria SistemelorRadu LuigiÎncă nu există evaluări
- REGRESIIDocument28 paginiREGRESIIdeyutzu26Încă nu există evaluări
- Curs 3Document15 paginiCurs 3BucurIonutÎncă nu există evaluări
- Circuite TrifazateDocument20 paginiCircuite TrifazateGingarasu Mihaela100% (4)
- Curs 1 Prelucrarea Datelor ExperimentaleDocument9 paginiCurs 1 Prelucrarea Datelor ExperimentalenowbishÎncă nu există evaluări
- Interpolare Si RegresiiDocument23 paginiInterpolare Si Regresiideyutzu26100% (3)
- 1 PrefataDocument9 pagini1 PrefataAvram Lucia AlexandraÎncă nu există evaluări
- Importanta GisDocument2 paginiImportanta GisAvram Lucia AlexandraÎncă nu există evaluări
- Energia SolarăDocument13 paginiEnergia SolarăAvram Lucia AlexandraÎncă nu există evaluări
- Morfologia FeteiDocument2 paginiMorfologia FeteiAvram Lucia AlexandraÎncă nu există evaluări
- ColorimetrieDocument3 paginiColorimetrieAvram Lucia AlexandraÎncă nu există evaluări
- FrenetDocument23 paginiFrenetAvram Lucia AlexandraÎncă nu există evaluări
- Date - Modele de DateDocument19 paginiDate - Modele de DateAvram Lucia AlexandraÎncă nu există evaluări
- Panouri SolareDocument20 paginiPanouri SolareAvram Lucia AlexandraÎncă nu există evaluări
- Integrale de SuprafataDocument27 paginiIntegrale de SuprafataAvram Lucia AlexandraÎncă nu există evaluări
- Analizac 1Document15 paginiAnalizac 1Avram Lucia AlexandraÎncă nu există evaluări
- CaltopDocument5 paginiCaltopAvram Lucia AlexandraÎncă nu există evaluări