S-ar putea să vă placă și
- Schema Bloc A Unui RobotDocument9 paginiSchema Bloc A Unui RobotCristi PirvanescuÎncă nu există evaluări
- Micro ActuatoriDocument13 paginiMicro Actuatorirazvanjuv100% (2)
- 5 MotoareDocument32 pagini5 Motoareadrianl136378100% (1)
- Capitolul 2 - Motoarele Pas Cu PasDocument7 paginiCapitolul 2 - Motoarele Pas Cu PasMarius-Mirel GiurăscuÎncă nu există evaluări
- Sistem Robotic Mobil Cu Posibilitate de Deplasare Pe Perete Plan VerticalDocument18 paginiSistem Robotic Mobil Cu Posibilitate de Deplasare Pe Perete Plan VerticalMihnea Andrei Alexe100% (1)
- Motoare Pas Cu PasDocument18 paginiMotoare Pas Cu PasMagdalinoiu Dragos80% (5)
- Teme Licenta 2012 2013 Telecom ModDocument10 paginiTeme Licenta 2012 2013 Telecom ModCorina NeculaÎncă nu există evaluări
- SAD - Notite de CursDocument72 paginiSAD - Notite de CursAlexandru-Marian DanilaÎncă nu există evaluări
- Proiect AtestatDocument22 paginiProiect AtestatMihai NistorÎncă nu există evaluări
- Exemplu Proiect Cu Nota MinimaDocument42 paginiExemplu Proiect Cu Nota MinimaGigi BadaranzaÎncă nu există evaluări
- Motorul Pas Cu PasDocument5 paginiMotorul Pas Cu PasRoman AncaÎncă nu există evaluări
- Motorul ElectricDocument41 paginiMotorul ElectricteiusanuÎncă nu există evaluări
- Proiect Senzor de Culoare TCS 230Document4 paginiProiect Senzor de Culoare TCS 230Gabriel BalintÎncă nu există evaluări
- Controlul Unui Motor Stepper, Folosind Un MicrocontrolerDocument46 paginiControlul Unui Motor Stepper, Folosind Un MicrocontrolerPuscas100% (1)
- MEMSDocument22 paginiMEMSmasterdac2014Încă nu există evaluări
- Servomotoare de C.A. TrifazateDocument11 paginiServomotoare de C.A. TrifazateCraciun Alex100% (1)
- Interfete Pentru Controlul Temperaturii Masei Din Cuva Si Al Turatiei Motorului Pentru o Masina de SpalatDocument15 paginiInterfete Pentru Controlul Temperaturii Masei Din Cuva Si Al Turatiei Motorului Pentru o Masina de SpalatILIUȚĂ-DANIEL BOCȘARU100% (1)
- L1Document6 paginiL1Alex PumneaÎncă nu există evaluări
- 018 - Laborator 003 - MAP - Controlul Turatiei Cu ArduinoDocument5 pagini018 - Laborator 003 - MAP - Controlul Turatiei Cu ArduinoEnache DoruÎncă nu există evaluări
- Masini Cu Magneti PermanentiDocument42 paginiMasini Cu Magneti PermanentiCosmin Andrei50% (2)
- LicentaDocument49 paginiLicentaVera VeronikÎncă nu există evaluări
- Instrument A Ti A Virtuala Si Limbajul LabVIEWDocument14 paginiInstrument A Ti A Virtuala Si Limbajul LabVIEWCasandra CostinÎncă nu există evaluări
- Proiect RoboticaDocument68 paginiProiect RoboticaJolandaÎncă nu există evaluări
- Motor Pas Cu PasDocument14 paginiMotor Pas Cu PasIonut IlieÎncă nu există evaluări
- Senzori Și Traductoare Pneumatice Și HidrauliceDocument10 paginiSenzori Și Traductoare Pneumatice Și HidrauliceCristi FerikÎncă nu există evaluări
- Caracteristicile Motoarelor Pas Cu PasDocument8 paginiCaracteristicile Motoarelor Pas Cu Pastenzi2Încă nu există evaluări
- Catalog Motoare Pas Cu PasDocument8 paginiCatalog Motoare Pas Cu PasMarian Smadu100% (1)
- Inst AlimentareDocument53 paginiInst AlimentareCristian AnghelÎncă nu există evaluări
- Motoare Pas Cu PasDocument7 paginiMotoare Pas Cu PasCosmin AndreiÎncă nu există evaluări
- Teză de DoctoratDocument107 paginiTeză de DoctoratDana VerejanÎncă nu există evaluări
- Proiect 8Document17 paginiProiect 8camy1992Încă nu există evaluări
- Motorul DCDocument8 paginiMotorul DCBogdanGiuÎncă nu există evaluări
- Comanda Motoarelor Pas Cu PasDocument4 paginiComanda Motoarelor Pas Cu Pastenzi2Încă nu există evaluări
- ProiectDocument17 paginiProiectFlorin GeamanuÎncă nu există evaluări
- 13a - Actionarea Motoarelor Pas Cu Pas BipolareDocument5 pagini13a - Actionarea Motoarelor Pas Cu Pas BipolareMosu MisuÎncă nu există evaluări
- Circuit de Comanda Pentru Motoarele Pas Cu Pas Control Motor Pas Cu Pas - ElectroKITSDocument4 paginiCircuit de Comanda Pentru Motoarele Pas Cu Pas Control Motor Pas Cu Pas - ElectroKITSvali2daduicaÎncă nu există evaluări
- Circuite Integrate Pentru Comanda Servomotoarelor de Curent ContinuuDocument8 paginiCircuite Integrate Pentru Comanda Servomotoarelor de Curent ContinuuAndrei CandaleÎncă nu există evaluări
- FPDDocument20 paginiFPDFLORESCU MARCELÎncă nu există evaluări
- 2011-L2 Display LCD PDFDocument17 pagini2011-L2 Display LCD PDFAlexandra ParfenieÎncă nu există evaluări
- Vehicul RobotDocument7 paginiVehicul Robotpaula09Încă nu există evaluări
- Comanda MPP Implement at A Pe CalculatorDocument78 paginiComanda MPP Implement at A Pe CalculatorComputerEngineer Universitatea Petru MaiorÎncă nu există evaluări
- Voncila Ion Masini Electrice Capitolul8Document42 paginiVoncila Ion Masini Electrice Capitolul8terry bogardÎncă nu există evaluări
- Actionarea Robotilor MobiliDocument4 paginiActionarea Robotilor MobiliIonuţTudoracheÎncă nu există evaluări
- Cursul Meu 10 6. Structura Hardware A Unui Sistem MecatronicDocument26 paginiCursul Meu 10 6. Structura Hardware A Unui Sistem MecatronicVadim EriomencoÎncă nu există evaluări
- Senzor HallDocument7 paginiSenzor HallAutogrederÎncă nu există evaluări
- Sistem de Actionare Reversibila in 4 Cadrane Cu Convertor Bidirectional Cu Curenti de CirculatieDocument3 paginiSistem de Actionare Reversibila in 4 Cadrane Cu Convertor Bidirectional Cu Curenti de Circulatiesonic8659Încă nu există evaluări
- Comanda Motoarelor Pas Cu PasDocument13 paginiComanda Motoarelor Pas Cu PasCătălin Mănăilă100% (1)
- Proiectarea Unui TurometruDocument7 paginiProiectarea Unui TurometruDan StefanÎncă nu există evaluări
- Proiectarea Şi Implementarea de Brushless DC Motor Drive Si Sistemul de ControlDocument2 paginiProiectarea Şi Implementarea de Brushless DC Motor Drive Si Sistemul de ControlRamona_4ever14Încă nu există evaluări
- Micromotoare de Curent Continuu Fara PeriiDocument35 paginiMicromotoare de Curent Continuu Fara Periiicul1Încă nu există evaluări
- B ActionariDocument32 paginiB ActionariVladv123Încă nu există evaluări
- Motorul Universal Cu ColectorDocument3 paginiMotorul Universal Cu ColectorMIHAIMG19100% (1)
- Masinuta Teleghidata Controlata Cu PIC.Document19 paginiMasinuta Teleghidata Controlata Cu PIC.Popa LoredanÎncă nu există evaluări
- Termostat Cu TermistorDocument11 paginiTermostat Cu Termistorr_cristiÎncă nu există evaluări
- Sorina Zirbo Circuite ElectroniceDocument79 paginiSorina Zirbo Circuite ElectroniceSanda RuxandraÎncă nu există evaluări
- Robotic-Vacuum-cleaner-manual de Utilizare Nistor Petronela ElenaDocument226 paginiRobotic-Vacuum-cleaner-manual de Utilizare Nistor Petronela ElenaPetronela NistorÎncă nu există evaluări
- Robot Paralel Cu Trei Grade de LibertateDocument3 paginiRobot Paralel Cu Trei Grade de LibertateMihai CristianÎncă nu există evaluări
- Actionarea Motoarelor Pas Cu PasDocument4 paginiActionarea Motoarelor Pas Cu PasDiana TudoracheÎncă nu există evaluări
- Motorul PP Constr Model SimulareDocument37 paginiMotorul PP Constr Model Simularecoman_daniel_3Încă nu există evaluări
- Raport L1 ASDNDocument7 paginiRaport L1 ASDNAlexandru UmaneţÎncă nu există evaluări
- TCM PrezentareDocument18 paginiTCM PrezentareAlexandru UmaneţÎncă nu există evaluări
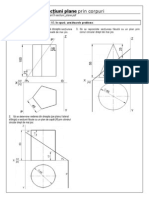
- 5 Sectiuni Plane5-Sectiuni - PlaneDocument1 pagină5 Sectiuni Plane5-Sectiuni - PlaneAlexandru UmaneţÎncă nu există evaluări
- 3-Epura PlanuluiDocument3 pagini3-Epura PlanuluiAlexandru UmaneţÎncă nu există evaluări