S-ar putea să vă placă și
- Mecanica Analitica - Curs1Document24 paginiMecanica Analitica - Curs1Gabriela MileaÎncă nu există evaluări
- Fizica Automatica Anul 1Document13 paginiFizica Automatica Anul 1Alex SuciuÎncă nu există evaluări
- Ex DinamicaDocument7 paginiEx DinamicaAlexanderNCÎncă nu există evaluări
- Curs 1Document8 paginiCurs 1ursrici3Încă nu există evaluări
- Sisteme de Arbori RamificateDocument7 paginiSisteme de Arbori RamificateAnadDanaÎncă nu există evaluări
- Curs 2Document11 paginiCurs 2Simonika OanaÎncă nu există evaluări
- TAPDS Curs 2 SISTEME MULTIRATĂ PDFDocument67 paginiTAPDS Curs 2 SISTEME MULTIRATĂ PDFMarius FerdyÎncă nu există evaluări
- Curs 4 Cmaie MicuDocument55 paginiCurs 4 Cmaie MicuPaunescu MihaiÎncă nu există evaluări
- Laboratoare TSDocument80 paginiLaboratoare TSCirnaROÎncă nu există evaluări
- Curs NukaDocument77 paginiCurs NukaVictor FurmanÎncă nu există evaluări
- 3 Probleme Cu Sisteme 1gdlDocument2 pagini3 Probleme Cu Sisteme 1gdladrianmarian1994Încă nu există evaluări
- Vibratii 1Document11 paginiVibratii 1goita94Încă nu există evaluări
- Iii. Elemente de Mecanică Analitică: IntroducereDocument10 paginiIii. Elemente de Mecanică Analitică: IntroducereDan GhimpuÎncă nu există evaluări
- Robotica Avansata CursDocument107 paginiRobotica Avansata CursgomarluxÎncă nu există evaluări
- Metoda Elementului Finit În AviațieDocument69 paginiMetoda Elementului Finit În AviațieRamona NeculaiÎncă nu există evaluări
- Robotica Avansata Curs Stadiul Actual Al RoboticiiDocument152 paginiRobotica Avansata Curs Stadiul Actual Al RoboticiiRazvan MitruÎncă nu există evaluări
- Teoria Sistemelor 2Document26 paginiTeoria Sistemelor 2Viorel CuricÎncă nu există evaluări
- Mecanica Clasica2 PDFDocument13 paginiMecanica Clasica2 PDFkillerbee1967Încă nu există evaluări
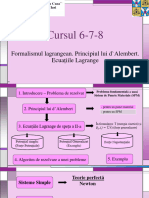
- Formalismul Lagrangean c6 8Document24 paginiFormalismul Lagrangean c6 8Not DavidÎncă nu există evaluări
- SCF Lucrarea6Document75 paginiSCF Lucrarea6Beatrice SecosanÎncă nu există evaluări
- Dinamica Masinilor Si UtilajelorDocument139 paginiDinamica Masinilor Si UtilajelorLORELAY1004Încă nu există evaluări
- Levitatie Magnetica (Ultima Varianta)Document31 paginiLevitatie Magnetica (Ultima Varianta)Anad DanaÎncă nu există evaluări
- Cap1 - Notiuni RecapitulativeDocument18 paginiCap1 - Notiuni RecapitulativeLucicaPatuleaÎncă nu există evaluări
- Cuantificarea Energiei.Document19 paginiCuantificarea Energiei.Ghita Alexandru MihaiÎncă nu există evaluări
- 6 (1) - Curs Spectre RotatieDocument34 pagini6 (1) - Curs Spectre RotatieLaura NicolaeÎncă nu există evaluări
- DSM Curs 02Document7 paginiDSM Curs 02Gabriel SirboiuÎncă nu există evaluări
- Cursuri 1 7Document145 paginiCursuri 1 7Alin NegarăÎncă nu există evaluări
- Proiect Tsa 2 19 WordDocument37 paginiProiect Tsa 2 19 WordGold RiverÎncă nu există evaluări
- Proiect Tsa 2 WordDocument30 paginiProiect Tsa 2 WordВитёк МужичёкÎncă nu există evaluări
- CURS 1 Introducere Sisteme DinamiceDocument22 paginiCURS 1 Introducere Sisteme DinamiceAlessandroÎncă nu există evaluări
- Fizica Parte IDocument139 paginiFizica Parte ISilviuÎncă nu există evaluări
- Mecanica AnaliticaDocument3 paginiMecanica AnaliticaRadu Ene100% (1)
- Exemple Subiecte de Examen La Metode NumericeDocument7 paginiExemple Subiecte de Examen La Metode NumericePanait DragosÎncă nu există evaluări
- Curs de Fizica Generala (Pt. Anul I)Document139 paginiCurs de Fizica Generala (Pt. Anul I)petrasÎncă nu există evaluări
- TSRA Cap6Document28 paginiTSRA Cap6victorinneÎncă nu există evaluări
- Curs 1 Micu MNDocument32 paginiCurs 1 Micu MNNicole Hanson100% (1)
- Curs Vibratii-Siteme DiscreteDocument14 paginiCurs Vibratii-Siteme Discretefrog_roÎncă nu există evaluări
- Probleme de Fizica cls.10 - A. Popescu Et Al (2000)Document208 paginiProbleme de Fizica cls.10 - A. Popescu Et Al (2000)winchester lungÎncă nu există evaluări
- Capitolul 16 PDFDocument87 paginiCapitolul 16 PDFIacob AndreiÎncă nu există evaluări
- SS Cap1Document47 paginiSS Cap1gi_henry_20064237Încă nu există evaluări
- Curs Teoria Sistemelor 1Document7 paginiCurs Teoria Sistemelor 1GavriloaiaClaudiuAndreiÎncă nu există evaluări
- 5.1 S Absorbitorul DinamicDocument2 pagini5.1 S Absorbitorul Dinamicadrianmarian1994Încă nu există evaluări
- MIS14Document95 paginiMIS14Urban CasianÎncă nu există evaluări
- TRR 1Document15 paginiTRR 1Marian Bogdan MicuÎncă nu există evaluări
- Curs 11 Micu MN PDFDocument46 paginiCurs 11 Micu MN PDFAlex D. StefanÎncă nu există evaluări
- Circ Logice SecventialeDocument26 paginiCirc Logice SecventialeStanescu KosminÎncă nu există evaluări
- 1Document78 pagini1Maher309Încă nu există evaluări
- Procese Tranzitorii ElectromagneticeDocument61 paginiProcese Tranzitorii ElectromagneticeCodreanu Petru100% (1)
- Matematici PTR EconomistiDocument189 paginiMatematici PTR EconomistiHim47Încă nu există evaluări
- Despre FEMMDocument3 paginiDespre FEMMAndrei RadulescuÎncă nu există evaluări
- Dinamica Structurilor Si Eleme curs-MX 2020 PDFDocument123 paginiDinamica Structurilor Si Eleme curs-MX 2020 PDFGrigoreOzonÎncă nu există evaluări
- Proiect - Mecanisme - 1Document36 paginiProiect - Mecanisme - 1MihaiBuleu100% (1)
- Fizica fenomenologică: Compendiu - Volumul 1De la EverandFizica fenomenologică: Compendiu - Volumul 1Evaluare: 4.5 din 5 stele4.5/5 (2)
- Fizica fenomenologică: Compendiu - Volumul 2De la EverandFizica fenomenologică: Compendiu - Volumul 2Evaluare: 5 din 5 stele5/5 (1)