S-ar putea să vă placă și
- Ecuatia CerculuiDocument5 paginiEcuatia CerculuiMarin BînzariÎncă nu există evaluări
- Variante Rezolvate Matematica 2009Document5 paginiVariante Rezolvate Matematica 2009mirelusi59480% (5)
- Rezolvare Model Bac 2020 Mate-Info M PDFDocument7 paginiRezolvare Model Bac 2020 Mate-Info M PDFClaudia ArdeleanÎncă nu există evaluări
- Rezolvar Subiecte Bacalaureat 2020 - Matematică-InformaticăDocument7 paginiRezolvar Subiecte Bacalaureat 2020 - Matematică-InformaticăMediafax.ro75% (4)
- SINTEZE Conice Si CuadriceDocument28 paginiSINTEZE Conice Si Cuadriceandorian86% (7)
- GeometrieDocument17 paginiGeometrieIulian PistanilaÎncă nu există evaluări
- Probleme Geometrie Analitica-parteaI I+II PDFDocument13 paginiProbleme Geometrie Analitica-parteaI I+II PDFjokeCrstÎncă nu există evaluări
- Dreapta Plan RezolvateDocument6 paginiDreapta Plan RezolvateSlavita JarcovÎncă nu există evaluări
- Dreapta in Plan 2Document6 paginiDreapta in Plan 2bogdanmunteanuÎncă nu există evaluări
- Sem 7,8Document16 paginiSem 7,8cvacasa50Încă nu există evaluări
- Probleme Rezolvate AGDocument30 paginiProbleme Rezolvate AGdolo bobo100% (2)
- Numere Complexe Afixe Teorie Si AplicatiiDocument12 paginiNumere Complexe Afixe Teorie Si AplicatiiTudor Minascurta100% (1)
- Conice Și Cuadrice PDFDocument30 paginiConice Și Cuadrice PDFSerban ElenaÎncă nu există evaluări
- Vectori de PozitieDocument3 paginiVectori de PozitieAdi CatanăÎncă nu există evaluări
- Rezolvare Subiecte Bacalaureat 2020 - Matematica-TehnologicDocument5 paginiRezolvare Subiecte Bacalaureat 2020 - Matematica-TehnologicMediafax.ro100% (1)
- Probleme Cuadrice PDFDocument10 paginiProbleme Cuadrice PDFCristina BerlinschiÎncă nu există evaluări
- Tema 18 Insolvabilitatea ÎntreprinzătorilorDocument10 paginiTema 18 Insolvabilitatea ÎntreprinzătorilorCorina PapucÎncă nu există evaluări
- Tema 17 Reorganizarea Si Lichidarea Persoanelor Juridice Cu Scop LucrativDocument17 paginiTema 17 Reorganizarea Si Lichidarea Persoanelor Juridice Cu Scop LucrativCătălina UnÎncă nu există evaluări
- Tema Sistem BancarDocument11 paginiTema Sistem BancarMihaela MunteanuÎncă nu există evaluări
- Tema 15 Societatile CooperatisteDocument6 paginiTema 15 Societatile CooperatisteDaniela Gîsca100% (1)
- Numere Complexe Afixe Teorie Si AplicatiiDocument15 paginiNumere Complexe Afixe Teorie Si AplicatiiTudor Minascurta100% (1)
- Sdrem2 AlgaDocument6 paginiSdrem2 AlgaCris BraduÎncă nu există evaluări
- Matematica Manual Suport PDFDocument97 paginiMatematica Manual Suport PDFcristina7anamaria7ge100% (1)
- Plan Si DreaptaDocument15 paginiPlan Si Dreaptabe HÎncă nu există evaluări
- Trigonometrie Dreapta in PlanDocument7 paginiTrigonometrie Dreapta in PlangabycomanderÎncă nu există evaluări
- Refacere Teste 30 August 2021Document21 paginiRefacere Teste 30 August 2021knasto05Încă nu există evaluări
- Planul Si Dreapta in SpatiuDocument13 paginiPlanul Si Dreapta in SpatiuionÎncă nu există evaluări
- Cursuri AlgebraDocument34 paginiCursuri AlgebraLilyÎncă nu există evaluări
- Geometrie Afina (Conice&cuadrice)Document28 paginiGeometrie Afina (Conice&cuadrice)Iulian DanciuÎncă nu există evaluări
- ALGAD_Curs3_52026bfd08a3240d73ef96f8b6f1841aDocument9 paginiALGAD_Curs3_52026bfd08a3240d73ef96f8b6f1841acamelia.croitoruÎncă nu există evaluări
- Dreapta in Spatiu - SemDocument3 paginiDreapta in Spatiu - SemRada IoanÎncă nu există evaluări
- Numere Complexe Afixe Teorie Si Aplicatii 564cc3c6efd75Document121 paginiNumere Complexe Afixe Teorie Si Aplicatii 564cc3c6efd75Blasciuc Chirosca GabrielaÎncă nu există evaluări
- ALGA Cap9Document20 paginiALGA Cap9Ioana-Bianca LascaracheÎncă nu există evaluări
- Problemepropuse gz345Document2 paginiProblemepropuse gz345Bujor AlexandruÎncă nu există evaluări
- Model 2 Subiect Matematica Admitere 2018Document2 paginiModel 2 Subiect Matematica Admitere 2018Flaviu DanielÎncă nu există evaluări
- Examen IE A 1 09 2021Document16 paginiExamen IE A 1 09 2021Robert PetreÎncă nu există evaluări
- Test Recapitulativ - Clasa A VIII ADocument1 paginăTest Recapitulativ - Clasa A VIII ACarmen FiricescuÎncă nu există evaluări
- Dreapta PlanDocument6 paginiDreapta Plantudor111Încă nu există evaluări
- Seminar 13Document10 paginiSeminar 13Chivu Andrei-VladÎncă nu există evaluări
- 1207 Grupuri de Transformari GeometriceDocument14 pagini1207 Grupuri de Transformari GeometriceVasile LucianÎncă nu există evaluări
- E Nr15Document1 paginăE Nr15Cristian SanduÎncă nu există evaluări
- Tema AlgDocument9 paginiTema AlgFreakazoid GeorgeÎncă nu există evaluări
- Cap. Determinanti SeminariiDocument25 paginiCap. Determinanti SeminariiTeodorescu MadalinaÎncă nu există evaluări
- Curs 9 AlgebraDocument8 paginiCurs 9 AlgebraOana MaryaÎncă nu există evaluări
- 1 Fisadelucru3Document4 pagini1 Fisadelucru3maya blogÎncă nu există evaluări
- EC DiferențialeDocument40 paginiEC DiferențialeAl 1Încă nu există evaluări
- Dreapta. Teorie Si ProblemeDocument10 paginiDreapta. Teorie Si ProblemeDaniel SarbuÎncă nu există evaluări
- Sem 13Document1 paginăSem 13Sirghi AndreiÎncă nu există evaluări
- GD Sem1Document9 paginiGD Sem1the.successful.women.cornerÎncă nu există evaluări
- CL 9 EnunturiDocument3 paginiCL 9 EnunturiStevineonÎncă nu există evaluări
- Izometrii Aplicatii PDFDocument2 paginiIzometrii Aplicatii PDFcami_cris2116Încă nu există evaluări
- Cls 9Document2 paginiCls 9Gabriel OPÎncă nu există evaluări
- Tema 2Document2 paginiTema 2MmmÎncă nu există evaluări
- Concepte - Matematice - Liceu - Ce Trebuie Cunoscute - (Mai-Ales-Pentru-Studenti-Profil-Uman-1Document10 paginiConcepte - Matematice - Liceu - Ce Trebuie Cunoscute - (Mai-Ales-Pentru-Studenti-Profil-Uman-1Yusuf RadawiÎncă nu există evaluări
- Exercitii 1 ALGAED 2020Document2 paginiExercitii 1 ALGAED 2020Madalina GhiutaÎncă nu există evaluări
- 1004 Numere Complexe in GeometrieDocument6 pagini1004 Numere Complexe in GeometrievalentinbrojbanÎncă nu există evaluări
- StiinteDocument2 paginiStiinteRazvan TimofciucÎncă nu există evaluări
- ElipsaDocument4 paginiElipsaAxl CarnabyÎncă nu există evaluări
- ER14Document4 paginiER14Corina PapucÎncă nu există evaluări
- ER13Document3 paginiER13Corina PapucÎncă nu există evaluări
- ER12Document7 paginiER12Corina PapucÎncă nu există evaluări
- ER11Document15 paginiER11Corina PapucÎncă nu există evaluări
- Tema 3 Sisteme Monetare NationaleDocument6 paginiTema 3 Sisteme Monetare NationaleCorina PapucÎncă nu există evaluări
- Institutiile SmiDocument10 paginiInstitutiile SmiQountino WasqesÎncă nu există evaluări
- Uniunea Economica Si MonetaraDocument24 paginiUniunea Economica Si MonetaraDenissa LoredanaÎncă nu există evaluări
- Tema 1Document8 paginiTema 1Maria DanutaÎncă nu există evaluări
- Tema 16 Intreprinderea de Stat Si MunicipalaDocument11 paginiTema 16 Intreprinderea de Stat Si MunicipalaDaniela GîscaÎncă nu există evaluări
- SI Dreptul AfacerilorDocument24 paginiSI Dreptul AfacerilorCorina PapucÎncă nu există evaluări
- Tema 5 Raportul Juridic. Raspunderea JuridicaDocument8 paginiTema 5 Raportul Juridic. Raspunderea JuridicaDaniela GîscaÎncă nu există evaluări
- Tema 4 Izvoarele Dreptului Afacerilor. Interpretarea.Document11 paginiTema 4 Izvoarele Dreptului Afacerilor. Interpretarea.Noname00Încă nu există evaluări
- AccizeleDocument61 paginiAccizeleMia Balan100% (1)
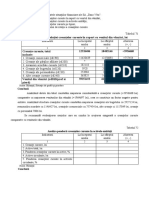
- Analiza CreanteDocument4 paginiAnaliza CreanteCorina PapucÎncă nu există evaluări