S-ar putea să vă placă și
- Ecuatia CerculuiDocument5 paginiEcuatia CerculuiMarin BînzariÎncă nu există evaluări
- Formule m2Document14 paginiFormule m2Ianis PalagaÎncă nu există evaluări
- Variante Rezolvate Matematica 2009Document5 paginiVariante Rezolvate Matematica 2009mirelusi59480% (5)
- GeometrieDocument17 paginiGeometrieIulian PistanilaÎncă nu există evaluări
- Teste Matematica - C-P Nicolescu (1989)Document386 paginiTeste Matematica - C-P Nicolescu (1989)mihaela lumezeanuÎncă nu există evaluări
- Probleme Rezolvate AGDocument30 paginiProbleme Rezolvate AGdolo bobo100% (2)
- Tema 15 Societatile CooperatisteDocument6 paginiTema 15 Societatile CooperatisteDaniela Gîsca100% (1)
- BAC - Rezolvari Matematica 2009Document3 paginiBAC - Rezolvari Matematica 2009bdigitala80% (5)
- Rezolvare - Bacalaureat Matematica Subiecte 29 August 2012 M1Document7 paginiRezolvare - Bacalaureat Matematica Subiecte 29 August 2012 M1Hyperion100% (1)
- Rezolvare Model Bac 2020 Mate-Info M PDFDocument7 paginiRezolvare Model Bac 2020 Mate-Info M PDFClaudia ArdeleanÎncă nu există evaluări
- Rezolvar Subiecte Bacalaureat 2020 - Matematică-InformaticăDocument7 paginiRezolvar Subiecte Bacalaureat 2020 - Matematică-InformaticăMediafax.ro75% (4)
- Conice Și Cuadrice PDFDocument30 paginiConice Și Cuadrice PDFSerban ElenaÎncă nu există evaluări
- Problem Rezolvate Curbe 3dDocument12 paginiProblem Rezolvate Curbe 3drazvan_raz_1Încă nu există evaluări
- Functia de Gradul IIDocument11 paginiFunctia de Gradul IImohihek698Încă nu există evaluări
- Numere Complexe Afixe Teorie Si AplicatiiDocument12 paginiNumere Complexe Afixe Teorie Si AplicatiiTudor Minascurta100% (1)
- Tema Sistem BancarDocument11 paginiTema Sistem BancarMihaela MunteanuÎncă nu există evaluări
- 0908 Probleme PDFDocument10 pagini0908 Probleme PDFConstantinescu SebastianÎncă nu există evaluări
- Tema 17 Reorganizarea Si Lichidarea Persoanelor Juridice Cu Scop LucrativDocument17 paginiTema 17 Reorganizarea Si Lichidarea Persoanelor Juridice Cu Scop LucrativCătălina UnÎncă nu există evaluări
- MatriceDocument12 paginiMatriceAle MariaÎncă nu există evaluări
- 11 - Fisa - de - Lucru MatriceDocument2 pagini11 - Fisa - de - Lucru MatriceSanduSandu50% (2)
- Tema 18 Insolvabilitatea ÎntreprinzătorilorDocument10 paginiTema 18 Insolvabilitatea ÎntreprinzătorilorCorina PapucÎncă nu există evaluări
- Fizica, Sem 6Document4 paginiFizica, Sem 6leryleÎncă nu există evaluări
- Concepte - Matematice - Liceu - Ce Trebuie Cunoscute - (Mai-Ales-Pentru-Studenti-Profil-Uman-1Document10 paginiConcepte - Matematice - Liceu - Ce Trebuie Cunoscute - (Mai-Ales-Pentru-Studenti-Profil-Uman-1Yusuf RadawiÎncă nu există evaluări
- Model 2 Subiect Matematica Admitere 2018Document2 paginiModel 2 Subiect Matematica Admitere 2018Flaviu DanielÎncă nu există evaluări
- Note 2Document9 paginiNote 2pink pantherÎncă nu există evaluări
- Plan Si DreaptaDocument15 paginiPlan Si Dreaptabe HÎncă nu există evaluări
- Ongm CT 9Document3 paginiOngm CT 9Raluu IlincqÎncă nu există evaluări
- Matematica Manual Suport PDFDocument97 paginiMatematica Manual Suport PDFcristina7anamaria7ge100% (1)
- ALGAD Curs3Document9 paginiALGAD Curs3camelia.croitoruÎncă nu există evaluări
- Cursuri AlgebraDocument34 paginiCursuri AlgebraLilyÎncă nu există evaluări
- Planul Si Dreapta in SpatiuDocument13 paginiPlanul Si Dreapta in SpatiuionÎncă nu există evaluări
- Spatii VectorialeDocument6 paginiSpatii VectorialeChim VesaÎncă nu există evaluări
- GeometrieDocument3 paginiGeometrieCeriseu AndreiÎncă nu există evaluări
- Cap. Determinanti SeminariiDocument25 paginiCap. Determinanti SeminariiTeodorescu MadalinaÎncă nu există evaluări
- GD Sem1Document9 paginiGD Sem1the.successful.women.cornerÎncă nu există evaluări
- Seminara 7Document2 paginiSeminara 7Maria GaneanuÎncă nu există evaluări
- Probleme Algebra RezolvateDocument122 paginiProbleme Algebra RezolvateAna JugravuÎncă nu există evaluări
- ALGA Cap5Document15 paginiALGA Cap5Ioana-Bianca LascaracheÎncă nu există evaluări
- RezolvariDocument12 paginiRezolvariJohanna LenoraterianÎncă nu există evaluări
- Adobe Scan 17 Sept. 2022Document25 paginiAdobe Scan 17 Sept. 2022catiÎncă nu există evaluări
- Baze În Plan Şi În Spaţiu. Sisteme Carteziene de Coordonate. Coordonatele Vectorului Şi Punctului. Operaţii Liniare Cu Vectori În CoordonateDocument4 paginiBaze În Plan Şi În Spaţiu. Sisteme Carteziene de Coordonate. Coordonatele Vectorului Şi Punctului. Operaţii Liniare Cu Vectori În CoordonateAlexandr TrimaliucÎncă nu există evaluări
- Proprietăți Ale DeterminanțilorDocument4 paginiProprietăți Ale DeterminanțilorConstantin BirilÎncă nu există evaluări
- Numere Complexe Afixe Teorie Si Aplicatii 564cc3c6efd75Document121 paginiNumere Complexe Afixe Teorie Si Aplicatii 564cc3c6efd75Blasciuc Chirosca GabrielaÎncă nu există evaluări
- Det FCT de GR II in Conditii Date PDFDocument5 paginiDet FCT de GR II in Conditii Date PDFDragos NistorÎncă nu există evaluări
- Geometrie Afina (Conice&cuadrice)Document28 paginiGeometrie Afina (Conice&cuadrice)Iulian DanciuÎncă nu există evaluări
- Dinca Sa InequalitiesBook (p.41-49)Document9 paginiDinca Sa InequalitiesBook (p.41-49)Daniel DanÎncă nu există evaluări
- 01 Etapa - 01 - Concurs - FMI - 22 - Mai - 2021Document3 pagini01 Etapa - 01 - Concurs - FMI - 22 - Mai - 2021Irina CÎncă nu există evaluări
- Barem A Februarie2022 RezolvareDocument10 paginiBarem A Februarie2022 RezolvareDarknessÎncă nu există evaluări
- Puncte Laticiale - PT Clasa A VII-ADocument2 paginiPuncte Laticiale - PT Clasa A VII-AMaria ToricelliÎncă nu există evaluări
- Seminar 13-IEDocument18 paginiSeminar 13-IEKarina MariaÎncă nu există evaluări
- 1006 Metoda VectorialaDocument9 pagini1006 Metoda VectorialaLavinia MaxineanuÎncă nu există evaluări
- MateInfoUB 2023 SubiecteDocument3 paginiMateInfoUB 2023 SubiecteMilioara Qi VîrlanÎncă nu există evaluări
- Med 8.2Document2 paginiMed 8.2dragosÎncă nu există evaluări
- 2 2021Document2 pagini2 2021AndreiÎncă nu există evaluări
- 2 2021Document2 pagini2 2021AndreiÎncă nu există evaluări
- Tema AlgDocument9 paginiTema AlgFreakazoid GeorgeÎncă nu există evaluări
- Chestionar Matematica Nr. 1Document2 paginiChestionar Matematica Nr. 1raceanu_catalin7449100% (1)
- Asupra Inegalit. de Tip I.W - ruSU CONSTANTINDocument4 paginiAsupra Inegalit. de Tip I.W - ruSU CONSTANTINTatan OvidiuÎncă nu există evaluări
- Subiecte ExameneDocument122 paginiSubiecte ExamenebereghicixeniaÎncă nu există evaluări
- ER13Document3 paginiER13Corina PapucÎncă nu există evaluări
- ER14Document4 paginiER14Corina PapucÎncă nu există evaluări
- ER11Document15 paginiER11Corina PapucÎncă nu există evaluări
- ER17Document3 paginiER17Corina PapucÎncă nu există evaluări
- Tema 1Document8 paginiTema 1Maria DanutaÎncă nu există evaluări
- Tema 3 Sisteme Monetare NationaleDocument6 paginiTema 3 Sisteme Monetare NationaleCorina PapucÎncă nu există evaluări
- Tema 16 Intreprinderea de Stat Si MunicipalaDocument11 paginiTema 16 Intreprinderea de Stat Si MunicipalaDaniela GîscaÎncă nu există evaluări
- AccizeleDocument61 paginiAccizeleMia Balan100% (1)
- Uniunea Economica Si MonetaraDocument24 paginiUniunea Economica Si MonetaraDenissa LoredanaÎncă nu există evaluări
- Institutiile SmiDocument10 paginiInstitutiile SmiQountino WasqesÎncă nu există evaluări
- Tema 5 Raportul Juridic. Raspunderea JuridicaDocument8 paginiTema 5 Raportul Juridic. Raspunderea JuridicaDaniela GîscaÎncă nu există evaluări
- Tema 4 Izvoarele Dreptului Afacerilor. Interpretarea.Document11 paginiTema 4 Izvoarele Dreptului Afacerilor. Interpretarea.Noname00Încă nu există evaluări
- SI Dreptul AfacerilorDocument24 paginiSI Dreptul AfacerilorCorina PapucÎncă nu există evaluări
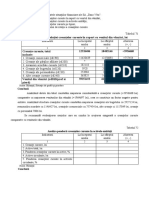
- Analiza CreanteDocument4 paginiAnaliza CreanteCorina PapucÎncă nu există evaluări