Documente Academic
Documente Profesional
Documente Cultură
Masuratori Terestre - Generalitati
Încărcat de
Una DouaTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Masuratori Terestre - Generalitati
Încărcat de
Una DouaDrepturi de autor:
Formate disponibile
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
1. MSURTORI TERESTRE - Generaliti Grupul de tiine, grupate sub denumirea generic de Msurtori Terestre, au ca obiect studiul formei i dimensiunilor Pmntului n ansamblul su, sau pe poriuni mai mari sau mai mici de teren, precum i reprezentarea acestor suprafee de teren pe hri i planuri. Msurtorile terestre cuprind urmtoarele discipline principale : a) GEODEZIA este tiina care se ocup cu msurarea i reprezentarea suprafeei Pmntului, inclusiv a cmpului gravific, ntr-un spaiu tridimensional, funcie de timp. Geodezia furnizeaz celorlalte ramuri ale msurtorilor terestre coordonatele precise ale unor puncte de pe teren (coordonate geografice, coordonate rectangulare plane i cote sau altitudini), puncte constituite n aa numitele reele de triangulaie geodezic sau, mai pe scurt reele geodezice, care acoper ntreaga suprafa de uscat a globului terestru. n calculele geodezice se ine seama de curbura Pmntului. b) TOPOGRAFIA b.1 Topografia general se ocup cu studiul instrumentelor i procedeelor pentru realizarea ridicrilor topografice, adic realizarea de hri i planuri ale diverselor zone de pe suprafaa terestr. Hrile i planurile topografice reprezint documentaia topografic de baz, util n multe ramuri economice i indispensabil n construcii, operaiuni militare, agricultur, etc. Msurtorile topografice se sprijin pe punctele reelei geodezice, suprafeele reprezentate fiind de regul mici, n acest caz nefiind necesar s se in seama de curbura terestr. b.2 Topografia inginereasc este o ramur a msurtorilor terestre care studiaz i rezolv o serie larg de probleme legate de studiile inginereti, de proiectarea, execuia i exploararea construciilor de orice fel. Termenul inginereasc n denumirea disciplinei subliniaz faptul c aceast ramur a msurtorilor terestre este legat de studiul, proiectarea, execuia i exploatarea lucrrilor de construcii inginereti. Topografia Inginereasc folosete instrumente de msurare i de calcul din topografia i geodezia utilizate la dezvoltarea bazei geodezice i cartografice de stat. Totui, la rezolvarea problemelor speciale de construcii-montaj, le verificarea construciilor nalte i de forme speciale, la observaiile asupra deformaiilor i deplasrilor construciilor, etc. Se folosesc metode speciale de nalt precizie, metode care au solicitat realizarea unor dispozitive i aparaturi originale. Topografia Inginereasc este o disciplin de sine stttoare, cu un larg spectru de probleme i problematici. Fundamentele (bazele) tiinifice sunt n strns interdependen cu problematicile specifice disciplinelor Geodezie, Fotogrametrie,
1
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
Tehnic de calcul i Fizic. Caracteristic pentru aceast disciplin este creterea contactelor cu alte domenii de specialitate. c) CARTOGRAFIA c.1 Cartografia matematic este tiina sistemelor de proiecie, care fac trecerea, prin procedee matematice, de la suprafaa curb terestr la suprafaa plan a suportului hrii i planului topografic. c.2 Redactarea, editarea i multiplicarea hrilor i planurilor. d) FOTOGRAMETRIA este o ramur mai nou a msurtorilor terestre i se ocup cu realizarea de hri i planuri prin prelucrarea unor fotografii speciale numite fotograme, preluate cu ajutorul unor camere foto speciale, de pe platforme terestre sau aeriene. d.1 Fotogrametria inginereasc furnizeaz informaii fotogrametrice referitoare la determinarea deplasrilor i deformaiilor construciilor inginereti, aprecierea volumelor de excavaii, la releveele faadelor, etc. d.2 Teledetecia studiaz, exploateaz i prelucreaz informaiile furnizate de satelii artificiali, referitoare la sol, subsol, mediu nconjurtor, atmosfer, etc. 1.1 Forma i dimensiunile pmntului Pmntul are forma unui elipsoid de revoluie (de rotaie), rezultat din rotaia
unei elipse n jurul axei mici; extremitile axei mici corespund cu polii geografici ai Pmntului. Prin secionarea cu un plan vertical a unei poriuni din suprafaa globului terestru, se pot distinge, din punct de vedere al msurtorilor terestre, trei suprafee. a) Suprafaa geoidului este dat de suprafaa linitit a mrilor i oceanelor, prelungit pe sub continente, fiind numit i suprafaa de nivel zero, sau suprafaa de referin pentru determinarea altitudinilor; Geoidul este o figur de echilibru perpendicular n orice punct al ei la direcia verticalei dat de firul de plumb. Forma geoidului depinde de direcia vectorului acceleraie gravitaional, aceasta depinznd de fora de atracie a
2
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
maselor care sunt dispuse neregulat n interiorul Pmntului. n consecin, geoidul are o suprafa neregulat, care nu poate fi exprimat matematic dect n urma unor calcule extrem de laborioase, ondulat datorat expunerii eterogene a maselor n interiorul Pmntului. b) Suprafaa elipsoidului de referin este suprafaa matematic cea mai apropiat de suprafaa geoidului. n timp, diveri matematicieni i geodezi au calculat mai muli elipsoizi, fiecare tinznd spre parametrii optimi ai elipsoidului de referin. Actualmente n ara noastr se folosete elipsoidul Krasovski : - semiaxa mare a = 6378245 m - semiaxa mic b = 6356863 m - turtirea elipsei =
1 ab = 298.3 a
c) Suprafaa topografic este suprafaa real, fizic care face obiectul principal al msurtorilor i al reprezentrilor pe hri i planuri. Ea are o form neregulat, care nu se poate exprima matematic. Fiecare punct de pe suprafaa topografic se transpune pe elipsoid prin normala la elipsoid i capt coordonatele geografice (latitudinea) i (longitudinea) pe elipsoid. Latitudinea - este unghiul format de normala la elipsoid cu planul ecuatorului (poate fi nordic sau sudic) Longitudinea - este unghiul diedru pe care l face planul ce conine axa polilor i meridianul 0 ( ce trece prin observatorul astronomic de la Greenwich la est de Londra ), cu planul ce conine axa polilor i meridianul locului (ce trece prin punctul A). Se msoar la est, respectiv la vest de meridianul 0. Fiind rezolvat transpunerea pe elipsoid a punctelor de pe suprafaa topografic, urmeaz transformarea plan a elipsoidului prin intermediul sistemelor de proiecie furnizate de cartografia matematic. 1.2 Elementele topografice ale terenului Pentru determinarea poziiei i formei detaliilor topografice se aleg n mod judicios puncte caracteristice denumite puncte topografice. Ca puncte caracteristice pot fi considerate toate punctele de schimbare de direcie a liniilor de detaliu i toate punctele de schimbare de pant.
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
Elementele topografice ale terenului determin poziia reciproc n spaiu a punctelor topografice. Se pot deosebi elemente topografice liniare i elemente topografice unghiulare. Secionnd terenul cu un plan vertical pe direcia punctelor topografice A i B marcate pe teren, se obin: a) elementele topografice liniare: - distana (lungimea) nclinat L lungimea segmentului de dreapt care unete punctele A i B marcare pe teren; - distana orizontal D proiecia distanei nclinate pe un plan orizontal; - diferena de nivel HAB este distana msurat pe vertical ntre suprafeele de nivel care trece prin punctele A i B. Altitudinea punctelor de pe suprafaa Pmntului se determin fa de suprafaa geoidului, denumit suprafaa de nivel 0. Suprafeele care sunt normale n fiecare punct al lor la direcia vertical se numesc suprafee de nivel. Altitudinea sau cota absolut a unui punct topografic poate fi definit ca fiind distana msurat pe verticala punctului, cuprins ntre suprafaa de nivel ce trece prin punctul considerat i suprafaa de nivel 0. n cazul suprafeelor de teren mici (cazul topografiei) se poate considera c suprafeele de nivel, mpreun cu suprafaa de nivel 0 (suprafa aleas convenional, de cele mai multe ori) sunt planuri orizontale, paralele ntre ele. Verticalele punctelor vor putea fi considerate i ele paralele. H AB = H B H A H BA = H A H B Obs. n Romnia, suprafaa convenional fa de care se msoar cotele (altitudinile) este suprafaa Mrii Negre.
4
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
b) elemente topografice unghiulare: - unghiul de pant al terenului - este unghiul n plan vertical ce trece prin punctele A i B, i pe care l face lungimea nclinat L cu planul orizontal. Legtura ntre elementele topografice dat de relaiile : D = L cos = L sin z H AB = L sin = D tg H AB = L cos z = D ctgz - unghiul zenital z este unghiul n plan vertical, format de lungimea nclinat L cu verticala locului, dat de direcia vectorului acceleraie gravitaional (direcia firului de plumb): + z = 100g sau900 - unghiul orizontal - este unghiul diedru format de planurile verticale ( V1 i V2 ) ce conin cele dou linii de vizare (S1 i S2) sau aliniamentele S1 i respectiv S-2.
1.3 Orientri i axe de coordonate
Pentru a cunoate poziia detaliilor topografice fa de direciile cardinale, este necesar ca planul s fie orientat. Un plan va fi orientat cnd direciile marginilor acestui plan vor fi orientate n raport cu o direcie de referin, care este de regul direcia Nord. Orientarea unei direcii este unghiul orizontal format de direcia nord cu direcia respectiv, msurat n sens orar, de la direcia de referin spre direcia dat. AB = orientare direct
BA = AB + 200 g orientare invers
Lund n considerare un sistem rectangular de axe XOY i cunoscnd c prin fiecare punct poate trece un meridian geografic i unul magnetic, se pot defini: - orientarea magnetic m ; - orientarea geografic (azimut); - orientarea topografic 0 ( 0 = AB ) care se determin dup o paralel la axa OX (direcia meridianului geografic de origine);
5
Sisteme de scanare 3D ----------------------------------------------------------------------------------------------------------------------- = unghiul de convergen a meridianelor (trece prin A i prin 0) = 0 +
= m
= unghiul de declinaie magnetic n A la un moment dat ( adic
unghiul format de meridianul geografic i magnetic al aceluiai punct). Poziia punctelor n plan este determinat de coordonate polare sau coordonate rectangulare. - Coordonate polare n sistemul coordonatelor polare, poziia n plan a punctelor se determin prin intermediul razei vectoare di i a unghiului polar i, fa de o direcie cunoscut (SS). Obs. Dac axa de referin se afl pe direcia nord, unghiul polar este orientarea i. - Coordonate rectangulare n acest sistem, poziia unui punct A este dat prin coordonatele XA i YA. ntre coordonatele rectangulare i cele polare se pot stabili nite relaii care permit rezolvarea a dou probleme fundamentale n topografie : a) Determinarea distanei ntre dou puncte i a orientrii liniei care le unete, din coordonatele rectangulare ale punctelor. y y1 y12 = tg12 = 2 x 2 x1 x12
x 2 x1 x12 = y 2 y1 y12 y x 12 = arctg 12 sau 12 = arcctg 12 x12 y12 ctg12 =
Orientarea se calculeaz cu relaia care are raportul subunitar. X12 Y12 2 2 = d12 = (X12 ) + (Y12 ) = cos12 sin12 b) Determinarea coordonatelor rectangulare ale punct 2 cunoscnd coordonatele punctului 1, funcie de coordonatele polare (orientarea i distana dintre cele dou puncte).
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
1(X1 , Y1 ) d12
12
X 2 = X1 + X12 Y2 = Y1 + Y12
unde
X12 = d12 cos12 Y12 = d12 sin12
Creterile de coordonate X12 i Y12 sunt mrimi algebrice, semnele lor depinznd de cadranul n care se afl orientarea 12. 1.4 Uniti de msur utilizate n topografie Pentru msurarea lungimilor se folosete metrul cu multipli i submultilpli si. Pentru msurarea unghiurilor se folosete gradaia centisimal, adic cei 2 radiani ai unui cerc fiind mprii n 400g 1g = 100c ; 1c = 100cc
Aparatura topografic de msurat unghiuri folosete gradaia centisimal (cento = sut). Aparatura electronic modern din domeniul topografic are posibilitatea de a afia valorile unghiulare att n gradaia centisimal, ct i n gradaia sexagesimal.
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
2. Hri i planuri topografice 2.1 Caracteristicile hrilor i planurilor HARTA este o reprezentare convenional care d o imagine generalizat a unor poriuni mari ale suprafeei topografice. Deoarece pe hri este reprezentat o parte a suprafeei Pmntului sau ntreaga sa suprafa, la ntocmirea hrilor se ine seama de curbura Pmntului. Se face mai nti o reprezentare a suprafeelor de teren pe suprafaa curb a elipsoidului de referin i apoi se trece la proiecia pe un plan. Harta d o imagine de ansamblu a suprafeelor de teren, cu relativ puine detalii. PLANUL TOPOGRAFIC este o reprezentare convenional, dar a unei suprafee mici de teren, el fiind o imagine micorat i asemenea a proieciei orizontale a detaliilor de pe teren. Planul topografic d o reprezentare direct a proieciilor punctelor din teren pe un plan orizontal, neinnd seama de curbura Pmntului. Putem afirma c hrile i planurile sunt reprezentri 2D sau figuri asemenea celor din teren, reprezentate grafic pe un suport (hrtie sau alt suport, de exemplu ecranul calculatorului), coninnd exact attea informaii nct s fie clare, fidele i precise, utilizabile n ct mai multe domenii. 2.1.1 Scrile hrilor i planurilor Raportul constant dintre o distan orizontal d msurat pe plan sau hart i corespondenta sa D de pe teren se numete scara planului sau a hrii. Att d ct i D trebuie s fie exprimate n aceeai unitate de msur. Scrile pot fi numerice i grafice. - Scri numerice se exprim sub form de raport ( ; 1:n), numitorul scrii n artnd de cte ori sunt micorate pe plan sau hart proieciile orizontale D ale liniilor de pe teren. d 1 = D n Cu aceast relaie putem rezolva: - determinarea corespondentului pe teren D a unei distane d msurat pe plan sau hart - reducerea la scar a unei distane D de pe teren - determinarea scrii, dac se cunoate d de pe plan sau hart i omoloaga sa D de pe teren. Clasificarea planurilor i hrilor n funcie de scri: - planuri topografice realizate la scri mari ( 1: 50 1: 10000 ) - hri topografice realizate la scri medii ( 1: 10000 1: 200000 )
8
1 n
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
- hri geografice realizate la scri mici ( 1: 500000 1: 20000000 ) Precizia grafic a scrii Pg - reprezint corespondentul n metri pe teren, a unei erori e comis la raportare sau citire pe un plan sau hart.
e 1 = Pg = e n 10 3 Pg n
(e = 0,1+0,3 mm)
- Scri grafice sunt reprezentri grafice ale scrilor numerice. - scri grafice simple (liniare) - scri grafice compuse (transversale)
Scara grafic simpl 2.1.2 Semne convenionale topografice Semnele convenionale topografice sunt semne caracteristice utilizate la reprezentarea pe hri i planuri a detaliilor topografice planimetrice i a reliefului terenului. 2.1.2.1 Clasificarea semnelor convenionale : Semne convenionale pentru planimetrie: o semne convenionale de contur; o semne convenionale de scar detalii care au dimensiuni ce nu permit reducerea la scar; o semne convenionale explicative; semne convenionale altimetrice servesc la reprezentarea reliefului pe hri i planuri 2.1.2.2 Reprezentarea reliefului pe hri i planuri Relieful este constituit din totalitatea neregularitilor suprafeei topografice a Pmntului, fiind o combinaie de forme concave i convexe. Formele tip de relief sunt: esul, nlimea, depresiunea, valea, dealul i aua. O form complex de relief este bazinul hidrografic. Moduri de reprezentare a reliefului : a. Metoda planului cotat const n nscrierea cotelor corespunztoare n dreptul punctelor raportate pe plan. Planul cotat st la baza realizrii planului care are relieful reprezentat prin curbe de nivel;
9
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
b. Metoda curbelor de nivel reprezentare sugestiv a reliefului. Curba de nivel este locul geometric al punctelor de aceeai cot. Ele se obin prin secionarea unei forme de relief din teren cu nite planuri orizontale paralele i echidistante, numite suprafee de nivel. Elementele obinute n modul artat de mai sus, proiectate pe o suprafa orizontal i reduse la scar permit reprezentarea reliefului prin curbe de nivel pe hri i planuri. Distana msurat pe vertical ntre dou suprafee de nivel succesive se numete echidistana curbelor de nivel, E. n funcie de modul de reprezentare pe plan sau hart, putem ntlni: a) curbe de nivel normale care se traseaz din echidistan n echidistan, cu linie subire continu; b) curbe de nivel principale care se traseaz la valori rotunde ale cotelor (de exemplu: din 5 n 5 echidistane), cu linie continu ngroat. De regul pe aceste curbe se scriu valorile cotelor. c) Curbe de nivel ajuttoare se traseaz la jumtate din echidistan cu linie subire ntrerupt; d) Curbe de nivel accidentale se traseaz la 1/4 din echidistan, cu linii ntrerupte mai scurte dect cele ajuttoare. Curbele de nivel se cartografiaz (deseneaz) pe hri i planuri n culoarea sepia (maron deschis). Sensul de descretere a pantei este indicat de bergstrichuri (indicatoare de pant) sau de modul de scriere a valorilor pe curbele de nivel principale. 2.2 Probleme tehnice rezolvabile pe hri i planuri topografice a) Cadrul hrii sistem de linii paralele - cadrul interior constituit din meridianele paralele, din intersecia crora a rezultat trapezul reprezentat - cadrul geografic alctuit din dou linii paralele care sunt marcate prin segmente ce reprezint minutele de latitudine i longitudine. n colurile trapezului reprezentat sunt trecute valorile coordonatelor i , ele fiind utilizate la determinarea coordonatelor geografice ale punctelor - cadrul ornamental (exterior) b) Caroiajul kilometric sau caroiajul rectangular este un sistem de linii paralele cu axele de coordonate adoptate. Laturile ptratelor care alctuiesc aceast reea au
10
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
mrimi diferite n funcie de scara hrii sau planului, valorile liniilor reelei kilometrice sunt trecute ntre cadrul geografic i cadrul interior. 1. Determinarea coordonatelor rectangulare plane ale unui punct. Se face n funcie de coordonatele colului din SV ale ptratului n care se afl punctul respectiv (A).
x A = x SV + x y A = y SV + y
( y = (b(
ky =
x = a (mm ) n 10 3 k x
mm )
n 10 3 k y
) )
n metri
unde, n numitorul scrii; kx i ky coeficieni de deformaie ai suportului planului sau hrii, pe direciile x i respectiv y.
kx = lT l = T l Rx a + c
lT l = T l Ry b + d
2. Raportarea unui punct de coordonate cunoscute. Se determin coordonatele relative X i Y ale acelui punct, fa de colul de SV al ptratului n care se va afla: Y = YB YSV X = XB XSV ; Valorile X i Y se reduc la scar i se aplic, fa de colul de SV al ptratului pe direcia axelor de coordonate.
x(mm ) =
X (m ) 10 3 n
y (mm ) =
Y(m ) 10 3 n
Din punctele astfel obinute se vor ridica perpendiculare pe laturile ptratului, obinndu-se poziia pe hart a punctului B. 3. Determinarea distanelor orizontale. - utiliznd formula scrii numerice :
- utiliznd scrile grafice - din coordonatele rectangulare ale punctelor
1 d = D(m ) = d (mm ) n 10 3 n D
D=
(X)2 + (Y )2
(XB X A )2 + (YB YA )2
4. Determinarea orientrii unei direcii - prin msurare direct pe plan sau hart, cu ajutorul raportorului - din coordonatele rectangulare ale punctelor YAB YB YA YAB = AB = arctg tg AB = X AB X B X A X AB sau X AB X B X A X AB = AB = arctg ctg AB = YAB YB YA YAB
11
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
5. Determinarea cotelor punctelor, folosind curbele de nivel Punctul de pe plan se poate afla pe o curb de nivel i atunci va avea cota corespunztoare curbei de nivel, sau se poate afla ntre dou curbe de nivel, situaia n care, pentru determinarea cotei punctului, se procedeaz n felul urmtor : - se duce linia de cea mai mare pant prin punctul P, care va intersecta curbele de nivel 1 i 2; - se msoar segmentele d = 1P i D = 12 , n milimetrii, aparinnd i fraciunile de milimetru; - presupunnd c pe teren ntre punctele 1 i 2 panta este uniform se determin diferena de nivel h1P : d h1P = E , D fi: iar cota punctului va H P = H1 + h1P . 6. Determinarea pantei ntre dou puncte Prin pant se nelege nclinarea liniei ce unete cele dou puncte de pe teren, i se poate exprima n mai multe moduri: H AB p = tg = - sub forma tangentei unghiului de nclinare: DAB H AB - ca unghi de pant: = arctg D AB H AB p% = 100 tg = 100 - sub form procentual: DAB H AB - la mie : p%0 = 1000 tg = 1000 D AB 7. ntocmirea profilului topografic al terenului Profilul topografic al terenului se obine, prin secionarea terenului, pe direcia celor dou puncte cu un plan vertical, reprezentnd ntr-un sistem rectangular, punctele ce rezult din intersecia liniei AB cu toate curbele de nivel. Axa orizontal a sistemului rectangular, este axa distanelor (D), care se reprezint, de regul, la aceeai scar cu scara planului, iar axa vertical a sistemului
12
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
rectangular este axa cotelor (H), care se vor reprezenta la o scar de 10, 20 de ori mai mare dect cea a distanelor, pentru o reprezentare mai sugestiv. n rubrica distana ntre puncte se trec valorile D(m ) = d (mm ) n 103 corespunztoare distanei d msurate pe plan ntre punctele profilului. n rubrica panta se arat schematic schimbrile de pant sau se pot calcula pe tronsoane (valorile p%), avnd toate datele necesare trecute mai sus n cartuul profilului.
Pentru reprezentarea cotelor se procedeaz astfel: - se alege cota planului de referin (HPR), care este de preferat s fie mai mic dect cea mai mic valoare a cotei din profil; - se calculeaz apoi diferenele de nivel ntre punctele de profil i planu de referin (Hi HPR); - se transform eceste valori n corespondentele lor din profil, funcie de scara de reprezentare aleas pentru nlimi (1:n1, de exemplu): D( m ) d ( mm ) = 10 3 n1 - se raporteaz apoi, fa de planul de referin, aceste valori. n final, se ridic i se coboar perpendiculare din pnctele corespondente, obinndu-se astel punctele din profil. Se unesc apoi aceste puncte, obinndu-se linia de intersecie ntre planul vertical i suprafaa terenului. 8. Determinarea suprafeelor pe hri i planuri 8.1 Metode numerice a) Procedeul analitic se aplic atunci cnd se cunosc coordonatele punctelor conturului poligonal al suprafeei.
13
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
2S = x1 (y 2 y 3 ) x 2 (y1 y 3 ) + x3 (y1 y 2 ) = x1 (y 2 y 3 ) + x 2 (y 3 y1 ) + x3 (y1 y 2 )
x1 1 S = x2 2 x3
n
y1 1 y2 1 y3 1
2S = x i ( y i +1 y i 1 ) sau
i =1
2S = y i ( x i 1 x i +1 )
i =1
b) Procedeul geometric se poate aplica suprafeelor delimitate de contururi poligonale, care pot fi mprite n triunghiuri sau trapeze ale cror elemente au fost msurate direct pe teren. Dac suprafaa este un triunghi cruia i s-au msurat toate laturile a, b i c, se va utiliza relaia: a+b+c S = p( p a )( p b )( p c ) unde p = este semiperimetrul. 2 n cazul cnd se cunosc baza B i nlimea ale unui triunghi sau bazele B i b i nlimea a unui trapez , suprafeele se vor obine cu relaiile: ( b + B ) B S = , respectiv S = 2 2 Suprafaa poligonului se va obine prin nsumarea suprafeelor figurilor geometrice elementare n care a fost descompus. c) Procedeul trigonometric se folosete cnd se cunosc laturi i unghiuri ale triunghiurilor n care a fost descompus suprafaa. n funcie de dou laturi i unghiul cuprins ntre ele, relaiile de determinare a suprafeei triunghiurilor vor fi : ab ac b c S= sin C = sin B = sin A 2 2 2 8.2 Metode grafice a) Descompunerea suprafeei cu contur poligonal n figuri geometrice elementare Se procedeaz ca mai sus, dar elementele necesare calculului suprafeelor triunghiurilor i trapezelor se msoar pe plan sau hart, se transform n mrimi teren, funcie de scar, suprafaa total obinndu-se n final prin nsumarea suprafeelor pariale. b) Folosind o reea de paralele echidistante Procedeul se recomand n situaiile n care suprafaa de determinat are o form alungit, iar conturul acesteia este sinuos. Peste suprafaa de determinat se aplic o reea de paralele echidistante desenat pe un material transparent, care va forma cu conturul suprafeei, suprafee elementare
14
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
care pot fi aproximate cu nite trapeze. Se vor msura bazele trapezelor, nlimea lor va fi egal cu echidistanta a, aceste elemente transformndu-se n mrimi teren cu ajutorul scrilor numerice. Suprafaa total se va obine prin nsumarea trapezelor elementare : b + b2 b + b3 b + bn S = a 1 +a 2 + .......... + a n1 2 2 2 Observaie: - se poate msura linia mijlocie ci n fiecare trapez; tie c linia mijlocie - se b + b2 c1 = 1 , de exemplu; 2 - se transform apoi toate valorile n mrimi teren, funcie de scar (a se transform n A i ci se transform n Ci); - se calculeaz n final valoarea ariei cu relaia: S = A Ci c) Folosind o reea de ptrate (metoda reelei de ptrate module) Se utilizeaz, de asemenea, n cazul suprafeelor cu un contur sinuos. Suprafaa de pe plan se acoper cu o reea de ptrate cu latura a, construit pe un suport transparent. Relaia de determinare a suprafeei este: S = a 2 ( n1 + n 2 ) unde : n1 este numrul de ptrate ntregi din interiorul suprafeei; n2 este numrul de ptrate ntregi obinut prin aprecierea vizual, nsumnd ptratele fracionare marginale; a 2 - este suprafaa unui ptrat, calculat dup ce mrimea a, latura ptratului a fost exprimat n metrii pe teren, n funcie de scara planului. Precizia de determinare a suprafeei prin aceste metode grafice, depinde de scara planului, precum i de configuraia suprafeelor. Pentru mrirea preciziei de determinare este recomandabil s se fac determinri duble, independente S i S: S' + S'' S= 2
15
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
3. Metode de msurare a unghiurilor topografice. 3.1 Msurarea unghiurilor orizontale Pentru msurarea unghiurilor, att orizontale ct i verticale, este necesar ca teodolitul s fie verificat i rectificat, aparatul fiind aezat n staie, deci centrat i calat ntr-un punct topografic. 1. Metoda simpl
a) Procedeul prin diferena citirilor
Pentru msurarea unghiului ASB se procedeaz astfel : - se vizeaz punctul A n poziia I a lunetei (cercul vertical n partea stng) i se citete pe limb CAI - se deblocheaz micarea n plan orizontal a teodolitului, se rotete convenabil, vizndu-se punctul B - se execut citirea pe limb CBI - se trece n poziia a II a lunetei (cercul vertical n partea dreapt) i se vizeaz punctul B efectundu-se citirea CBII - se deblocheaz micarea n plan orizontal a teodolitului, se rotete n sens antiorar i se vizeaz punctul A, efectundu-se citirea CAII. ' + " I " II II ' = CI C ; = C C ; = B A B A 2 b) Procedeul cu 0 n coinciden (procedeul cu originea 0 pe limb) naintea vizrii ctre punctul A n poziia I, se aduce n coinciden diviziunea 0 a dispozitivului de citire cu diviziunea 0 a limbului, vizndu-se apoi punctul A, avnd CAI = 0, rezult : I I g I II II g ' = CI ; " = CII B C A = CB 0 = C B B C A = CB 200 3.2 Msurarea unghiurilor verticale Pentru msurarea unghiurilor verticale teodolitul trebuie s se afle aezat n staie (centrat i calat), deasupra unui punct topografic (A). n cellalt punct trebuie s existe un semnal topografic sau este inut o mir n poziie vertical. - se msoar nlimea aparatului i , de la partea superioar a punctului topografic pn la centrul de vizare (CV) al instrumentului
16
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
- se vizeaz la nlimea S (baza fluturelui) a semnalului topografic din punctul B, aducnd firul reticular orizontal la baza fluturelui semnalului, iar dac se folosete o mir, se vizeaz cu firul reticular orizontal la nlimea i, egal cu nlimea aparatului - se citete unghiul vertical la dispozitivul de citire Se fac determinri ale unghiului vertical (zenital sau de pant) n ambele poziii ale lunetei, determinndu-se valoarea medie: Z1 = C1
Z1 + Z 2 C1 + (400 g C2 ) ; = 2 2 control C1 + C2 = 400g 2 ec Z= Z 2 = 400g C2
17
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
4. Principiile de organizare a lucrrilor topografice Ansamblul lucrrilor efectuate pe teren n vederea obinerii unui plan topografic se numete ridicare topografic. Orice ridicare topografic trebuie executat pe baza unei reele de sprijin, de care se leag. n ara noastr, ridicrile topografice trebuie efectuate n sistemul reelei de sprijin geodezice de stat, creat separat pentru planimetrie i pentru altimetrie. Uneori, n cazul ridicrilor topografice locale, msurtorile se bazeaz pe reele de sprijin locale, care ulterior se integreaz n reeaua geodezic de stat. Un sistem de referin topografic ia natere prin stabilirea unui corp de referin, a unei suprafee de referin, a unui punct de referin sau a unei valori iniiale de referin bine fundamentate matematic sau fizic. Descrierea matematic sau fizic a sistemului de referin i materializarea lui pe teren conduce la noiunea de reea de referin. n momentul n care se efectueaz msurtori asupra unui obiect, se urmrete ca poziia acestuia s fie definit att planimetric ct i altimetric fa de aceeai reea, n aa fel nct s existe acele legturi matematice i fizice reciproce ntre obiect i reea i ntre obiectul respectiv i celelalte obiecte din jur. n practic s-a procedat la o separare a sistemului de referin (n locul unui sistem de referin tridimensional), alegndu-se un sistem planimetric bidimensional i un sistem de altitudine unidimensional. Modul de alctuire i dezvoltare al reelelor de sprijin pentru ridicri specifice topografiei depinde de: - mrimea suprafeei teritoriului care urmeaz a fi ridicat; - densitatea i natura detaliilor care intereseaz; - scara i precizia reprezentrii (planului topografic) care rezult n urma ridicrii. 4.1 Reele de sprijin planimetrice Pentru ridicrile planimetrice, baza geodezic este alctuit din punctele reelei de triangulaie geodezic de stat, puncte care sunt situate n vrfurile unor triunghiuri care acoper ntreaga suprafa a rii. Reeaua de triangulaie este organizat pe ordine de mrime dup cum urmeaz : - reeaua de triangulaie de ordinul I, triunghiurile avnd laturile de la 20 la 60 km; - reeaua de triangulaie de ordinul II, avnd ca scop reducerea distanei de 2060 km, dintre punctele reelei de ordinul I, reeaua de ordinul II avnd laturile de cca. 1020 km.
18
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
ndesirea se realizeaz prin puncte ale reelei de ordinul III, cu laturile triunghiurilor de 715 km i prin puncte de ordinul IV cu laturile de 48 km. Determinarea coordonatelor rectangulare ale punctelor de ordinul II, III i IV se face direct n planul de proiecie adoptat, pornind de la coordonatele cunoscute ale punctelor de ordinul I i innd seama de curbura Pmntului, la prelucrarea msurtorilor. ndesirea reelei de triangulaie de ordin superior (format din puncte de ordinul I, II, III i IV), se face prin puncte de ordin inferior (puncte de ordinul V), care sunt situate la distane de 12 km, cte un punct la 50100 ha. La determinarea poziiei punctelor reelelor geodezice, n afar de msurtori de unghiuri orizontale, se pot msura i laturi ale acelorai triunghiuri, reelele numindu-se reele de trilateraie. Combinarea msurtorilor de unghiuri i distane (triangulaie i trilateraie) permite o mai bun adaptare la condiiile existente pe teren. Pentru lucrrile inginereti, de amplasare a unor complexe industriale, complexe hidrotehnice, etc., pot fi realizate reele geodezice locale, care pot avea precizii mai mari dect reelele geodezice de stat, n care se ncadreaz ulterior. 4.2 Reele de sprijin altimetrice Baza de sprijin a ridicrilor altimetrice o constituie reeaua de nivelment geometric de stat, care se dezvolt de-a lungul principalelor ci de comunicaie sau pe vile principalelor ape curgtoare, sub forma unor iruri de puncte, numite trasee, avnd ca puncte iniiale i finale reperii zero- reperi fundamentali de la malul mrii. Punctele acestor trase, numite repere de nivelment geometric, crora li se transmit altitudini, sunt ncadrate n poligoane determinate prin nivelment geometric, care alctuiesc nivelmentul geometric superior de ordinul I, II, III IV, i nivelmentul geometric inferior de ordinul V. n zonele de munte, pentru determinarea altitudinilor punctelor de triangulaie, neincluse n reelele de nivelment geometric, se utilizeaz nivelmentul trigonometric. Cnd n zona de lucru nu exist un reper din reeaua de nivelment a rii, pot fi create reele altimetrice locale, cotele rezultate, nefiind cote absolute referite la nivelul mrii, ci cote locale. Pentru lucrrile inginereti cotele punctelor se pot obine prin nivelment tehnic, care const dintr-o reea complementar determinat prin nivelment geometric sau trigonometric, legat de nivelmentul general al rii sau de o reea local independent. 4.3 Ridicri topografice planimetrice Procedee de determinare a punctelor de sprijin: - Intersecia unghiular nainte - Intersecia unghiular napoi - Intersecia liniar - Drumuirea planimetric
19
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
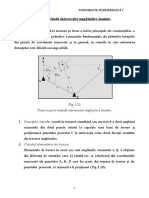
4.3.1 Intersecia unghiular nainte Pentru a determina coordonatele X, Y ale unui punct P, inaccesibil, cnd cunoatem coordonatele a dou puncte 1(X1, Y1) i 2(X2, Y2) materializate pe teren, se msoar pe teren cu teodolitul unghiurile i . Poziia punctului P se determin prin intersecia a dou drepte 1P i 2P, exprimate prin ecuaiile lor. Y Y1 = (X X1 ) tg1 Y Y2 = (X X 2 ) tg 2 - necunoscutele sunt X,Y - coordonatele punctului P. - se determin mai nti orientarea 12 din coordonatele punctelor 1 i 2. Y12 Y2 Y1 = tg12 = X12 X 2 X1 - cu ajutorul unghiurilor msurate i se determin orientrile 1P = 1 = 12 i 2 P = 2 = 21 + = 12 + 200g + Revenind la sistemul de ecuaii de mai sus putem obine: Y = Y1 + X tg1 X1 tg1
Y1 + X tg1 X1 tg1 Y2 = X tg 2 X 2 tg 2 Y2 Y1 = X(tg1 tg 2 ) + X 2 tg 2 X1 tg1 X= Y2 Y1 X 2 tg 2 + X1 tg1 Y1 Y2 + X 2 tg 2 X1 tg 2 = tg1 tg 2 tg 2 tg1 introducnd valoarea lui X n ecuaiile sistemului putem obine valoarea lui Y : Y = Y1 + (X X1 ) tg1
Y = Y2 + (X X 2 ) tg 2 trebuie s obinem acelai rezultat cu ambele relaii, pentru control. Pentru sigurana determinrii poziiei punctului P, este necesar s se execute msurtori din minim 3 puncte de coordonate cunoscute, calculndu-se coordonate din combinaii de cte dou direcii de intersecie. Dac valorile coordonatelor punctului P obinute din aceste combinaii nu difer cu mai mult dect toleranele admise, se vor lua drept coordonate ale punctului P, valorile medii.
4.3.2 Drumuirea planimetric Pentru determinarea de puncte noi de sprijin planimetrice se realizeaz trasee poligonale, msurndu-se lungimea laturilor determinate de noile puncte i unghiurile orizontale ce le formeaz laturile drumuirii.
20
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
Clasificarea drumuirilor planimetrice:
a) Din punct de vedere al formei: - Drumuirea sprijinit pe dou puncte i direcii cunoscute La aceast drumuire, punctele de sprijin sunt A i C, iar direciile cunoscute sunt cea de plecare AB i cea de sosire CD, fiind posibil controlul msurtorilor i al calculelor efectuate. - Drumuirea nchis pe punctul de plecare La aceast drumuire, elementele msurate n circuit poligonal sunt controlate, dac primul i ultimul unghi de frngere ca i ultima latur a drumuirii, reprezint trei elemente determinate excedentar. - Drumuire sprijinit pe un singur punct (drumuirea n vnt) La acest tip de drumuire nu sunt posibiliti de control, datorit faptului c se sprijin pe un singur punct. b) Dup modul de msurare a distanelor: - Drumuiri cu laturi msurate direct pentru msurare putnd fi utilizate rulete sau panglici topografice - Drumuiri cu laturi msurate indirect laturile sunt msurate stadimetric sau cu instrumente electrooptice
Proiectarea drumurilor se face pe un plan scara 1: 5000 sau la o scar mai mic, care cuprinde zona ce urmeaz a fi ridicat topografic, precum i poziia punctelor de triangulaie, fcndu-se un proiect al drumuirii, la care se ine seama de urmtoarele: - poziia punctelor drumuirii se alege astfel nct punctele s fie ferite de distrugere, s fie stabile n timp, s fie dispuse n apropierea punctelor de detaliu care vor fi obiectul ridicrii topografice - dac laturile drumuirii sunt msurate stadimetric, lungimile lor au valori de 30250 m, iar lungimea total a drumuirii nu trebuie s depeasc 2000 m n intravilan i 3000 m n extravilan - cnd laturile drumuirii sunt msurate direct, trebuie avut n vedere ca terenul s aib pant constant ntre punctele drumuirii Recunoaterea terenului are ca scop definitivarea drumuirii proiectate, traseul drumuirii fiind parcurs pe teren, cu aceast ocazie efectundu-se marcarea punctelor de drumuire din proiect, astfel nct s existe vizibilitate ntre ele. Marcarea punctelor drumuirii se face cu : - rui de lemn n extravilan - rui de metal n intravilan - borne de beton punctele mai importante Semnalizarea punctelor de drumuire se face doar n timpul msurtorilor cu semnale portabile (jaloane sau mire verticale).
21
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
Msurtori n drumuirea planimetric
a) Msurarea lungimilor laturilor drumuirii n cazul drumuirilor cu laturi msurate direct, lungimile laturilor se msoar cu panglici topografice sau cu rulete. Fiecare latur se msoar de dou ori, dus i ntors, l' + l'' n calcule fiind folosit media acestor valori: l= 2 b) Msurarea unghiurilor orizontale (de frngere ale laturilor drumuirii) Unghiurile orizontale se msoar de aceeai parte a drumuirii, de preferin prin metoda seriilor, efectund cte o serie de msurtori n fiecare punct de staie. n urma compensrii n staie se obin unghiurile orizontale i. Msurarea unghiurilor se face cu un teodolit de precizie medie. c) Msurarea unghiurilor de pant i Aceast operaie se face n cele dou poziii ale lunetei (I i II) n ambele sensuri, viznd la nlimea i a instrumentului (care se msoar dup aezarea teodolitului n staie), aa cum s-a artat la msurarea unghiurilor verticale.
Calculul drumuirilor planimetrice Drumuirea sprijinit pe dou puncte i direcii cunoscute
ntr-o astfel de drumuire se cunosc coordonatele rectangulare X, Y ale punctelor de sprijin A, B, C, D precum i valorile medii ale elementelor msurate: l' + l'' ' + '' ' + '' ; ; l= = = 2 2 2 Se urmrete determinarea coordonatelor rectangulare Xi, Yi, ale punctelor drumuirii, precum i altitudinea Hi ale fiecrui punct cnd cunoatem pentru punctele A i C cotele lor HA i HC. Pentru a rezolva aceast problem, calculele se desfoar n felul urmtor : a) Calculul distanelor orizontale i a diferenelor de nivel provizorii (sunt numite provizorii, pentru c sunt afectate de erori, provenite din msurtori de lungimi), cu relaiile : ; d i = l i cos i h i = l i sin i = d i tg i
b) Calculul i compensarea orientrilor:
22
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
- Calculul orientrilor direciilor de sprijin se face cu ajutorul coordonatelor cunoscute ale punctelor A, B, C i D. Y YC Y YA ; AB = arctg B CD = arctg D XB XA XD XC - Calculul orientrilor provizorii ale laturilor drumuirii ' A 1 = AB + A
' I 12 = 12 + 200 g + 1 400 g ' I 23 = 12 + 200 g + 2 400 g ' I g g 3 c = 23 + 200 + 3 400 ' CD = 3IC + 200 g + C 400 g
- Calculul coreciei de nchidere pe orientri Se observ c pentru direcia CD avem dou valori: o valoare just calculat din coordonatele punctelor C i D, i o alt valoare eronat, deci afectat de erorile de msurare ale unghiurilor i . ' e = Ve Vj = CD CD Aceast eroare trebuie s se ncadreze n tolerana admis ( e T ), care se determin cu relaia: T = p n unde: p este precizia dispozitivului de citire al teodolitului n numrul de staii efectuate cu teodolitul Corecia de nchidere pe orientare va fi: c = e , iar corecia unitar va fi: q n =
c e , unde n este numrul de unghiuri orizontale msurate = n n
- Compensarea i calculul orientrilor definitive ' A1 = A 1 + 1 q n
' 12 = 12 + 2 qn 'I 23 = 23 + 3 qn ' 3C = 3 C + 4 qn ' ' ' CD = CD + 5 q n = CD + n q n = CD +c
Corectarea progresiv a orientrilor provizorii se datoreaz faptului c unghiurile msurate, afectate de erori, particip n mod progresiv la determinarea acestora. c) Calculul i compensarea creterilor de coordonate Creterile de coordonate (coordonate relative) se determin prin transformarea coordonatelor polare (dij, ij) n coordonate rectangulare, raportate la punctul de drumuire anterior, conform relaiilor :
23
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
valorilor calculate se pune condiia ca suma creterilor de coordonate s fie egale cu diferena ntre coordonatele punctelor de sprijin . ; ; X ij = X AC Yij = YAC hij = H AC Deoarece creterile de coordonate provizorii au fost calculate cu ajutorul distanelor dij msurate pe teren, acestea conin erori, condiiile de mai sus nu vor fi ndeplinite. Se vor calcula erorile de nchidere : e X = X ij X AC ; eY = Yij YAC ; eh = hij H AC Dac erorile eX, eY i eh se ncadreaz n toleranele admise, atunci compensarea coordonatelor relative se face astfel : - se calculeaz coreciile unitare, cu relaiile :
qX = eX ; d ij
X A1 = d A1 cos A1 YA1 = d A1 sin A1 X12 = d12 cos 12 Y12 = d12 sin 12 X 23 = d 23 cos 23 Y23 = d 23 sin 23 X 3C = d 3C cos 3C Y3C = d 3C sin 3C Mrimile Xij i Yij sunt creterile de coordonate provizorii. Pentru controlul
qY =
eY ; d ij
qh =
eh d ij
- se calculeaz valorile compensate ale creterilor de coordonate : X A1 = X A1 + d A1 q X YA1 = YA1 + d A1 q Y h A1 = h A1 + d A1 q h
X12 = X12 + d12 q X X 23 = X 23 + d 23 q X
Y12 = Y12 + d12 q Y Y23 = Y23 + d 23 q Y
h12 = h12 + d12 q h h 23 = h 23 + d 23 q h
X 3C = X 3C + d 3C q X Y3C = Y3C + d 3C q Y h 3C = h 3C + d 3C q h Controlul calculelor: hij = H AC X ij = X AC ; Yij = YAC ; d Calculul coordonatelor absolute ale punctelor drumuirii X1 = X A + X A1 Y1 = YA + YA1 H 1 = H A + h A1
X 2 = X1 + X12 Y2 = Y1 + Y12 H 2 = H 1 + h12 H 3 = H 2 + h 23
H C = H 3 + h3C
X 2 = X 2 + X 23 Y3 = Y2 + Y23 Pentru control trebuie ca :
X C = X 3 + X 3C YC = Y3 + Y3C
24
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
5. Metode de ridicare a detaliilor topografice 5.1 Metode topografice de ridicare.
Ridicarea detaliilor topografice pentru realizarea planurilor la scar mare (1: 1 000, 1: 500, 1: 200, 1: 100) n zonele cu acoperire mare a terenului (zone construite n localiti, incinte industriale, noduri feroviare, incinte portuare, etc.) necesit un volum deosebit de lucrri, att n faza de teren ct i la cea de birou, datorit numrului de puncte caracteristice ale detaliilor topografice i a preciziei de reprezentare a poziiilor acestora. Factorul care intervine n plus, n cazul planurilor la scar mare, este precizia determinrii poziiei punctelor caracteristice a detaliilor, precizie care, de cele mai multe ori, este solicitat sau impus de beneficiarul lucrrii sau de ctre proiectantul general al acesteia. Pornind de la acest element esenial, este necesar ca, n prealabil, s se execute un studiu al preciziei necesare pentru efectuarea msurtorilor, studiu din care pot rezulta performanele mijloacelor de msurare i tehnologiile pe care va trebui s le utilizm la msurare, n aa fel nct s poat fi respectat precizia de determinare a detaliilor topografice. n condiiile n care este creat baza topografic de ridicare (reele de sprijin planimetrice i altimetrice pentru ridicri la scri mari) determinarea coordonatelor i cotelor punctelor caracteristice ale detaliilor topografice se realizeaz prin urmtoarele metode: - metoda coordonatelor polare (radierii); - metoda coordonatelor rectangulare. - metoda radierii, de ridicare altimetric a detaliilor (utiliznd nivelmentul geometric sau trigonometric).
5.1.1 Metoda radierii, de ridicare planimetric a detaliilor.
Principiul metodei const n msurarea, din punctul A al laturii de sprijin AB, a unghiului orizontal i a distanei orizontale D, pn la punctul C de detaliu, cruia i vom determina coordonatele rectangulare plane n funcie de coordonatele cunoscute ale punctului A i de elementele msurate pe teren: AC = AB + X C = X A + D cos AC YC = YA + D sin AC Datorit erorilor inerente care intervin la msurarea unghiurilor i distanelor, se va determina poziia punctului C, deplasat fa de poziia corect a punctului C cu valoarea c, compus dintr-o abatere transversal u i o abatere longitudinal s. Abaterea standard de poziie a punctului C va fi dat de relaia: 2 2 2 C = u + S n care: - S este abaterea standard a deplasrii longitudinale, care se accept c este egal cu abaterea standard de msurare a distanelor;
25
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
- u este abaterea standard a deplasrii transversale, generat de abaterea standard de msurare a unghiurilor B orizontale: N u = cc D AB
D D u D C C C
Metoda radierii.
n aceste condiii, va rezulta relaia abaterii standard a poziiei punctului C, de forma: D2 2 C = + 2 D cc 2 Neglijnd influena erorilor datelor iniiale (de poziie a punctelor reelei de sprijin A i B) pe care le putem considera foarte mici n raport cu erorile de msurare i aplicnd principiul influenei egale a erorilor componente, rezult: D S = cc = o - unde o este o component a abaterii standard provenit din aplicarea principiului influenei egale a erorilor; 2 2 C = 2 0 0 = C 2 Pentru o valoare cunoscut a abaterii standard de poziie a punctului de determinat C se poate calcula precizie de msurare a lungimilor i unghiurilor: C cc C S = i = 2 D 2 Cunoscnd aceste valori, se pot deduce caracteristicile tehnice ale mijloacelor de msurare i tehnologiile de msurare pe care va trebui s le utilizm n procesul de msurare.
5.1.2 Metoda coordonatelor rectangulare, de ridicare planimetric a detaliilor.
Metoda se utilizeaz la ridicarea detaliilor topografice care se desfoar predominant de o parte i de alta a unui aliniament de referin (AB), care poate fi o latur a unei drumuiri, iar terenul este aproximativ orizontal ( 5g). Metoda se poate utiliza la ridicarea punctelor caracteristice ale faadelor cldirilor i a punctelor caracteristice ale reelelor tehnico-edilitare n localiti, precum i la ridicarea limitelor de parcele, a conturului lacurilor sau a malurilor rurilor, etc.
26
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
Principiul metodei const n msurarea din punctul A al laturii de referin, pe aliniamentul AB, a abscisei AC1 = d1 = a pn la piciorul perpendicularei ridicat cu ajutorul unui echer topografic de la aliniament la punctul de detaliu C ( = 100g). Pe noua direcie se msoar ordonata C1C = d2 = b pn la punctul C al detaliului topografic care trebuie ridicat pn la aliniamentul AB. La aceast metod se utilizeaz x 102 mijloace simple de msurare: panglici, rulete i echere topografice.
C =100g X N 101 Y A d1(a) C1 d2(b)
Metoda coordonatelor rectangulare.
Se va avea n vedere, pe ct posibil, ca lungimile absciselor i ordonatelor s nu depeasc lungimile nominale ale mijloacelor de msurare a distanelor. Coordonatele rectangulare plane ale punctului C se determin n funcie de coordonatele cunoscute ale punctului A i de valorile msurate ale distanelor: - n sistemul rectangular xAy, generat de aliniamentul de referin: xC = XA + b yC = YA + a - n sistemul rectangular generat de coordonatele punctelor A i B, determinate din punctele de drumuire 101 i 102:
X AB Y + b AB D AB D AB X AB Y YC = YA + a AB b D AB D AB XC = X A + a
Erorile care intervin la msurarea elementelor topografice se reflect n abaterea standard de poziie a punctului C al detaliului topografic care se va reprezenta. Aceasta este dat de o relaie de forma:
2 2 2 C = d + d + d 2 cc
1 2
Considernd o influen egal a erorilor de msurare a unghiurilor i distanelor i c cele dou distane se msoar cu aceeai precizie, va rezulta:
d = d = d
1 2
= 2 + d 2 cc
2 C 2 d
27
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
C cc 2 Pentru o valoare cunoscut a valorii abaterii standard de poziie a punctului de determinat C se poate calcula precizie de msurare a lungimilor i a unghiului drept:
considerm c:
2 d =
d2 = O
O =
d = C 2 2
C cc = 2 d2
Cunoscnd aceste valori, se pot deduce caracteristicile tehnice ale mijloacelor de msurare i tehnologiile de msurare pe care va trebui s le utilizm n procesul de msurare.
5.1.3 Ridicri altimetrice Ridicrile altimetrice completeaz planimetria, dnd posibilitatea reprezentrii reliefului pe hri i planuri.
5.1.3.1 Modaliti de determinare a diferenelor de nivel
- nivelmentul geometric care se bazeaz pe principiul vizei orizontale a instrumentului; - nivelmentul trigonometric la care diferena de nivel se determin n funcie de unghiul de pant msurat i de distan; - nivelmentul hidrostatic care utilizeaz principiul vaselor comunicante; - nivelmentul barometric bazat pe principiul variaiei presiunii atmosferice n raport cu altitudinea.
5.1.3.2 Nivelment geometric
Aceast metod de determinare a diferenelor de nivel se recomand n terenuri mai puin nclinate (mai puin accidentate). Diferena de nivel se determin din diferena citirilor efectuate pe mire inute vertical n dou puncte, dup ce a fost efectuat orizontalizarea axei de vizare a instrumentului de nivelment. Nivelmentul geometric poate fi de mijloc sau de capt.
a. Nivelmentul geometric de mijloc
Instrumentul de nivelment se instaleaz la distane egale de mire, fiind permise abateri de pn la 2 m. Cu instrumentul n poziie de lucru, deci calat, se fac citiri pe cele dou mire amplasate pe punctele A i B i inute n poziie vertical. Diferena de nivel se determin cu relaia : H AB = a b Considernd cunoscut cota punctului B se poate determina cu ajutorul diferenei de nivel: H B = H A + H AB sau utiliznd altitudinea planului de vizare: H V = H A + a ; H B = H V b .
28
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
Utilizarea altitudinii planului de vizare (HV) se recomand n situaiile cnd dintr-un punct de staie se determin cotele mai multor puncte.
b. Metode radierii, de ridicare altimetric a detaliilor
Cu aceast metod se determin cotele punctelor de detaliu, aflate la distane pn la 300 m de instrumentul de nivelment. Aceste puncte alese judicios permit trasarea curbelor de nivel pe planurile topografice. Cotele punctelor Ri se obin pornind de la punctul A de drumuire, de cot cunoscut, utiliznd citirea a efectuat de mira instalat n poziie vertical n punctul A i citirile efectuate pe mirele instalate succesiv n punctele Ri. Se calculeaz altitudinea planului de vizare al instrumentului: HV = HA + a - cotele punctelor de detaliu Ri, obinndu-se cu relaiile: H R1 = H V r1
H R 2 = H V r2 H R 3 = H V r3
......... H Rn = H V rn
5.1.3.3. Nivelment trigonometric
Nivelmentul trigonometric se utilizeaz n terenuri accidentate i la distane mari (putnd ajunge pn la civa km). Neajunsurile metodei provin din faptul c este mai laborios dect nivelmentul geometric, fiind necesar s se msoare dou elemente, unghiul vertical i distana, alt inconvenient fiind precizia mai mic de determinare a diferenelor de nivel.
29
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
a. Determinarea diferenei de nivel la distan mic
Efectuarea msurtorilor: cu teodolitul instalat n punctul A, se msoar unghiul vertical, viznd pe o mir instalat n poziie vertical n punctul B, la nlimea i a instrumentului,.
Unghiul vertical msurat poate fi unghiul de pant, , sau unghiul zenital, z, corespunztor. Calcule: H AB = l sin = l cos z sau H AB = d tg = d ctgz unde: l este distana nclinat msurat direct pe teren; d este distana orizontal determinat cu relaia d = lcos, sau din coordonatele rectangulare (XA, YA i XB, YB) ale punctelor A i B. Dac nu se poate viza la nlimea i a instrumentului, ci la o nlime oarecare S (care poate fi nlimea unui semnal) vom avea: H AB + S = d tg ' + i de unde H AB = d tg ' + i S sau H AB = d ctgz' + i S Cota punctului B va fi: H B = H A + H AB
B B
H B = H A + d tg ' + i S H B = H A + d ctgz' + i S n cazul vizelor descendente, cnd unghiul de pant este negativ, cota punctului B se va obine cu relaiile: H B = H A d tg ' + i S
H B = H A d ctgz' + i S b. Determinarea diferenei de nivel la distan mare
La distane mari, rezultatul determinrilor altimetrice efectuate trigonometric, este influenat de curbura Pmntului i de refracia atmosferic. Dac se dorete ca
30
Sisteme de scanare 3D ------------------------------------------------------------------------------------------------------------------------
abaterea, datorat curburii Pmntului i refraciei atmosferice, s fie mai mic de 1 cm, distana ntre puncte nu trebuie s fie mai mare de 250 m. Pentru distane mai mari, trebuie luate n consideraie aceste influene. Diferena de nivel se va obine cu relaia : d2 ' ( ) H = d ctgz + i S + 1 k 2R 0 unde : k este coeficientul de refracie atmosferic (k=0,13); R0 este raza medie a pmntului (R0 = 6379 km). Influena refraciei are efecte mai mari n orele de diminea i dup amiaz, pentru c atunci se produc modificri mai importante ale coeficientului de refracie. Cnd este posibil s se lucreze cu vize n ambele sensuri, atunci prin calcularea mediei, influena refraciei este aproape eliminat.
31
S-ar putea să vă placă și
- Topografie Si CartografieDocument12 paginiTopografie Si CartografieGeorgiana Drg100% (1)
- Metoda Celor Mai Mici Patrate-PopoviciDocument6 paginiMetoda Celor Mai Mici Patrate-PopoviciUna DouaÎncă nu există evaluări
- Aspecte Ale Prelucrării Măsurătorilor GeodeziceDocument14 paginiAspecte Ale Prelucrării Măsurătorilor Geodeziceflorin serafin100% (1)
- Drumuire Planimetrica Metoda Masuratorilor IndirecteDocument13 paginiDrumuire Planimetrica Metoda Masuratorilor IndirecteFlorina GeorgianaÎncă nu există evaluări
- Aparate Şi Metode de Măsurare Utilizate În Reţelele Geodezice de ÎndesireDocument68 paginiAparate Şi Metode de Măsurare Utilizate În Reţelele Geodezice de ÎndesireAnonymous ets4ErvÎncă nu există evaluări
- Masuratori TerestreDocument103 paginiMasuratori TerestreIulia AlecuÎncă nu există evaluări
- Cartografie1Document17 paginiCartografie1Constantin TaranÎncă nu există evaluări
- Curs BGFDocument56 paginiCurs BGFEu Alin AlinÎncă nu există evaluări
- Măsurarea Direcțiilor Azimutale Prin Metoda Seriilor CompleteDocument6 paginiMăsurarea Direcțiilor Azimutale Prin Metoda Seriilor CompleteMihail MahuÎncă nu există evaluări
- Calcule Topografice in CadastruDocument27 paginiCalcule Topografice in CadastruAlexinNo JblÎncă nu există evaluări
- bgf1 SubiecteDocument1 paginăbgf1 SubiecteDragos0% (1)
- Triangulatia Topografica LocalaDocument4 paginiTriangulatia Topografica Localagv28gvÎncă nu există evaluări
- Cadastru 2Document83 paginiCadastru 2Dumitrescu Larisa-ElenaÎncă nu există evaluări
- Cartografie-Matematica - ProiecteDocument83 paginiCartografie-Matematica - ProiecteIoana MihalceaÎncă nu există evaluări
- Compensare Poligon Cu Punct CentralDocument37 paginiCompensare Poligon Cu Punct CentralAdrian TascaÎncă nu există evaluări
- Topografie Generala CURS RadulescuDocument210 paginiTopografie Generala CURS RadulescuDoris DelicotiÎncă nu există evaluări
- Concurs COMPENSARI AdiCompletDocument80 paginiConcurs COMPENSARI AdiCompletAnonymous vcELQKÎncă nu există evaluări
- Trasarea Elementelor TopograficeDocument14 paginiTrasarea Elementelor TopograficeRadu AndreeaÎncă nu există evaluări
- Cartografie 2020 2021Document121 paginiCartografie 2020 2021Andra ArbanasÎncă nu există evaluări
- Examen Curs Cadastru MTC IIIDocument3 paginiExamen Curs Cadastru MTC IIICosmin SpînuÎncă nu există evaluări
- Note de Curs Geodezie A 2 Badescu GabrielDocument128 paginiNote de Curs Geodezie A 2 Badescu GabrielAndrei Mociran100% (1)
- Subiecte Rezolvate Topografie CCIA Anul 1 Semestrul 1 C BrisanDocument22 paginiSubiecte Rezolvate Topografie CCIA Anul 1 Semestrul 1 C BrisanCos_sensÎncă nu există evaluări
- Curs Topo 30 AprilieDocument20 paginiCurs Topo 30 AprilieLucianÎncă nu există evaluări
- Tema 12Document15 paginiTema 12Mihai GrecuÎncă nu există evaluări
- Tema 4Document6 paginiTema 4efim100% (1)
- Cap 3Document34 paginiCap 3Maxim MirceaÎncă nu există evaluări
- Proiect Topografie 2Document72 paginiProiect Topografie 2alan alan12Încă nu există evaluări
- Lucrarea NR - 10Document4 paginiLucrarea NR - 10Axentii OctavianÎncă nu există evaluări
- Introducere În Calculul ErorilorDocument19 paginiIntroducere În Calculul ErorilorSima AlexandruÎncă nu există evaluări
- Drumuirea PlanimetricăDocument3 paginiDrumuirea Planimetricăeremia scutelnicÎncă nu există evaluări
- PDFDocument13 paginiPDFStanislav PaladiiÎncă nu există evaluări
- Astronomie Geodezică - Curs 5Document5 paginiAstronomie Geodezică - Curs 5Alexandra DutaÎncă nu există evaluări
- Proiect La Tehnologii Geodezice SpatialeDocument20 paginiProiect La Tehnologii Geodezice SpatialeEla RusÎncă nu există evaluări
- Foto - Curs Vi 2011Document32 paginiFoto - Curs Vi 2011NataliaÎncă nu există evaluări
- Teledetectie Si Fotointerpretare GeograficaDocument111 paginiTeledetectie Si Fotointerpretare GeograficaL Grig100% (1)
- PROIECT GEODEZIE ExempluDocument6 paginiPROIECT GEODEZIE ExempluKiya MichelleÎncă nu există evaluări
- Unghiuri Utilizate in Masurarea Soarelui Pe Bolta CereascaDocument11 paginiUnghiuri Utilizate in Masurarea Soarelui Pe Bolta Cereascatmc khrissaÎncă nu există evaluări
- Curs FotogrammetrieDocument186 paginiCurs FotogrammetrieAndreea Timis0% (1)
- Proiecţia Stereografică 1930Document77 paginiProiecţia Stereografică 1930Alinutza StancescuÎncă nu există evaluări
- CURS Proiectii Cartografice 2012Document70 paginiCURS Proiectii Cartografice 2012Tudor EnacheÎncă nu există evaluări
- Proiect Aero EXEMPLUDocument14 paginiProiect Aero EXEMPLUNataliaÎncă nu există evaluări
- Fotogrammetria Gabriel PopescuDocument192 paginiFotogrammetria Gabriel PopescuGemanaru VasiÎncă nu există evaluări
- GEODEZIE1Document83 paginiGEODEZIE1IoanaDeleanÎncă nu există evaluări
- Curs Fotogrammetrie Inginereasca Si DigitalaDocument10 paginiCurs Fotogrammetrie Inginereasca Si Digitaladb_oprisÎncă nu există evaluări
- Intersectie Combinata TopoDocument4 paginiIntersectie Combinata Topoersylya8350% (2)
- Rezumat Ionut Maican PDFDocument77 paginiRezumat Ionut Maican PDFAlex Lorenzo IvanÎncă nu există evaluări
- SUBIECTE GeodezieDocument11 paginiSUBIECTE GeodezieAlex MoraruÎncă nu există evaluări
- Curs 6-14Document74 paginiCurs 6-14ValyValiusaÎncă nu există evaluări
- Topografie - Masurarile TerestreDocument65 paginiTopografie - Masurarile TerestreTomasevschi Zinaida100% (1)
- AerotriangulatieDocument5 paginiAerotriangulatieathal100% (1)
- Vol I GeodezieDocument87 paginiVol I GeodezieDiana Mihaela100% (1)
- Masuratori Terestre Si CadastruDocument4 paginiMasuratori Terestre Si CadastruAdina AnamariaÎncă nu există evaluări
- Reteaua Nationala GPSDocument13 paginiReteaua Nationala GPSLoredanaŞerbanÎncă nu există evaluări
- Cursuri Geodezie A 2 An III Sem.IDocument143 paginiCursuri Geodezie A 2 An III Sem.IVasilescu Ciprian100% (1)
- Topografie Generala Manea RalucaDocument82 paginiTopografie Generala Manea RalucaDoris DelicotiÎncă nu există evaluări
- Curs AIA Masuratori TerestreDocument102 paginiCurs AIA Masuratori TerestreRoman CristianÎncă nu există evaluări
- Referat nr.2 Feraru DragoșDocument12 paginiReferat nr.2 Feraru Dragoșsn9f87mhvvÎncă nu există evaluări
- 11 Masuratori Terestre PDFDocument103 pagini11 Masuratori Terestre PDFBiban Hațegan AndreeaÎncă nu există evaluări
- Topografie 1.1-4.2Document7 paginiTopografie 1.1-4.2irismileÎncă nu există evaluări
- Topografie Suport CursDocument117 paginiTopografie Suport CursNicolae GrozavÎncă nu există evaluări
- Topografie Curs 2019-2020Document93 paginiTopografie Curs 2019-2020vali N.Încă nu există evaluări
- ADER - 12 - 2 - 1 - Etapa 2 PDFDocument45 paginiADER - 12 - 2 - 1 - Etapa 2 PDFUna DouaÎncă nu există evaluări
- Art 3Document6 paginiArt 3Una DouaÎncă nu există evaluări
- Instructiuni Si Anexe WebcadgenDocument16 paginiInstructiuni Si Anexe WebcadgenUna DouaÎncă nu există evaluări
- Memoriu Tehnic JustificativDocument4 paginiMemoriu Tehnic JustificativUna DouaÎncă nu există evaluări
- Compensarea Reţelei de Nivelment Prin Metoda Observaţiilor IndirecteDocument18 paginiCompensarea Reţelei de Nivelment Prin Metoda Observaţiilor IndirecteUna DouaÎncă nu există evaluări
- Masuratori Terestre - GeneralitatiDocument31 paginiMasuratori Terestre - GeneralitatiUna DouaÎncă nu există evaluări
- Matcovschi Lanturi Sist Astept MarkovDocument208 paginiMatcovschi Lanturi Sist Astept MarkovUna DouaÎncă nu există evaluări