S-ar putea să vă placă și
- Proiect Management OperationalDocument18 paginiProiect Management OperationalRamona GhitescuÎncă nu există evaluări
- Functionalitati CLARVISION ERPDocument44 paginiFunctionalitati CLARVISION ERPAndra Fecioru100% (1)
- Sisteme Flexibile de PrelucrareDocument11 paginiSisteme Flexibile de PrelucrareOlei AdrianÎncă nu există evaluări
- Subiecte Examen Operational (Teorie +aplicații)Document47 paginiSubiecte Examen Operational (Teorie +aplicații)Nicolae Nistor100% (1)
- O abordare ușoară a sfeșnicelor japoneze: Ghidul introductiv la tranzacționarea cu sfeșnice și la cele mai eficiente strategii de analiză tehnicăDe la EverandO abordare ușoară a sfeșnicelor japoneze: Ghidul introductiv la tranzacționarea cu sfeșnice și la cele mai eficiente strategii de analiză tehnicăEvaluare: 5 din 5 stele5/5 (6)
- Indrumar IRISP - Complet (Cu Diacritice)Document81 paginiIndrumar IRISP - Complet (Cu Diacritice)Pavel DanielÎncă nu există evaluări
- Sisteme FlexibileDocument25 paginiSisteme FlexibileGabor Veres100% (4)
- SFF!Document16 paginiSFF!Rus CosminÎncă nu există evaluări
- Operational REZOLVATEDocument8 paginiOperational REZOLVATEAlina MandarinaÎncă nu există evaluări
- Analiza swot în 4 pași: Cum să folosești matricea SWOT pentru a face diferența în carieră și în afaceriDe la EverandAnaliza swot în 4 pași: Cum să folosești matricea SWOT pentru a face diferența în carieră și în afaceriEvaluare: 3.5 din 5 stele3.5/5 (3)
- Realizarea Si Implement Area Sistemelor Flexibile de PrelucrareDocument38 paginiRealizarea Si Implement Area Sistemelor Flexibile de PrelucrareAndreea Lăzăroiu100% (1)
- Actionari Electropneumatice Si Pneumatice - LaboratorDocument46 paginiActionari Electropneumatice Si Pneumatice - LaboratorGheorghita MelinteÎncă nu există evaluări
- Metodologie de Proiectare A Celulelor de Fabricație Livia Dana BejuDocument12 paginiMetodologie de Proiectare A Celulelor de Fabricație Livia Dana BejuCășeriu BiancaÎncă nu există evaluări
- Lista Subiecte CCSPDocument14 paginiLista Subiecte CCSPMadalinaBriscoiuÎncă nu există evaluări
- CioDocument7 paginiCioFlorin PanainteÎncă nu există evaluări
- Locul Si Rolul ProiectariiDocument6 paginiLocul Si Rolul ProiectariiTabita MariaÎncă nu există evaluări
- Managementul OperationalDocument43 paginiManagementul OperationalDanilaEvelinaÎncă nu există evaluări
- Proiect de AnDocument35 paginiProiect de AnStefan LupuÎncă nu există evaluări
- Conducerea Optimala A Sistemelor de ProducţieDocument7 paginiConducerea Optimala A Sistemelor de ProducţieDanielÎncă nu există evaluări
- Laborator 7Document15 paginiLaborator 7MariaÎncă nu există evaluări
- Linie Flexibila de Fabricare A BrioselorDocument17 paginiLinie Flexibila de Fabricare A BrioselorSeby RoscaÎncă nu există evaluări
- Catia 1Document14 paginiCatia 1Răzvan PîrîealăÎncă nu există evaluări
- Curs 4Document58 paginiCurs 4ILIE-ADRIAN BOLATAÎncă nu există evaluări
- Proiect TeleaDocument22 paginiProiect TeleaClaudiu ClassÎncă nu există evaluări
- Sisteme Flexibile Pe Prelucrari Prin AschiereDocument76 paginiSisteme Flexibile Pe Prelucrari Prin AschiereFlorin Jipa100% (5)
- Structura ProductieiDocument15 paginiStructura ProductieigcroitoruÎncă nu există evaluări
- Managementul Operational - Curs 2Document16 paginiManagementul Operational - Curs 2Raluca Sky GheorgheÎncă nu există evaluări
- SUBIECTEDocument16 paginiSUBIECTEMarius BejanÎncă nu există evaluări
- Teste GrilaDocument5 paginiTeste GrilaFlorin SterÎncă nu există evaluări
- Subiecte Management Operational Pe ScurtDocument21 paginiSubiecte Management Operational Pe ScurtIoanaVeronicaAlbu100% (1)
- Proiectarea Si A Asistata - Notite de CursDocument40 paginiProiectarea Si A Asistata - Notite de CursClaudiuÎncă nu există evaluări
- Sisteme Flexibile de Fabricatie, Suport de CursDocument27 paginiSisteme Flexibile de Fabricatie, Suport de CursClaudiu ClassÎncă nu există evaluări
- Curs 3 TSFFDocument23 paginiCurs 3 TSFFSergiu IvanÎncă nu există evaluări
- Subiecte Rez Man OperDocument23 paginiSubiecte Rez Man OperSamir Rawashdeh Al-AhmadÎncă nu există evaluări
- Subiecte Management Operational Pe ScurtDocument21 paginiSubiecte Management Operational Pe ScurtDiana Maria RobanÎncă nu există evaluări
- Politici ManagerialeDocument8 paginiPolitici ManagerialeOnakaÎncă nu există evaluări
- Sisteme de ProductieDocument12 paginiSisteme de ProductieBezedica MariusÎncă nu există evaluări
- Curs Management 20Document5 paginiCurs Management 20Cristina TiaÎncă nu există evaluări
- Management Operational REZOLVATEDocument13 paginiManagement Operational REZOLVATElovsetnehes3850Încă nu există evaluări
- Proiect de Diploma Tehnician Operator CNCDocument23 paginiProiect de Diploma Tehnician Operator CNCIA CIÎncă nu există evaluări
- Curs 11Document3 paginiCurs 11GollprakÎncă nu există evaluări
- Curs 4 Metode Moderne de Programarea FabricatieiDocument10 paginiCurs 4 Metode Moderne de Programarea FabricatieiAngelescuÎncă nu există evaluări
- Curs 6 Managementul ProductieiDocument59 paginiCurs 6 Managementul ProductieiTrif CalinÎncă nu există evaluări
- Aszalos Hunor Szilard - Metode de Organizare A ProductieiDocument4 paginiAszalos Hunor Szilard - Metode de Organizare A ProductieiMártonfi Gréta-TamaraÎncă nu există evaluări
- Proiect Managementul Aprovizionari MaterialelorDocument33 paginiProiect Managementul Aprovizionari MaterialelortcivÎncă nu există evaluări
- Mocan Marian - Logistica - Cap. 4Document60 paginiMocan Marian - Logistica - Cap. 4AndreeaÎncă nu există evaluări
- Curs 3. Planificarea ProductieiDocument9 paginiCurs 3. Planificarea ProductieiNicola FofircaÎncă nu există evaluări
- Sisteme Informatice de Gestiune (Indrumar Laborator) - Cristescu M.Document148 paginiSisteme Informatice de Gestiune (Indrumar Laborator) - Cristescu M.Szilvia NagyÎncă nu există evaluări
- Managementul ProductieiDocument103 paginiManagementul ProductieiAndreea BalanÎncă nu există evaluări
- Unificarea Sistemelor Expert Si CADDocument8 paginiUnificarea Sistemelor Expert Si CADGeta IvanÎncă nu există evaluări
- Cartografierea fluxului de valoare: Reducerea deșeurilor și maximizarea eficiențeiDe la EverandCartografierea fluxului de valoare: Reducerea deșeurilor și maximizarea eficiențeiÎncă nu există evaluări
- Diagrama Ishikawa pentru gestionarea riscurilor: Anticiparea și rezolvarea problemelor din cadrul afaceriiDe la EverandDiagrama Ishikawa pentru gestionarea riscurilor: Anticiparea și rezolvarea problemelor din cadrul afaceriiÎncă nu există evaluări
- Tabloul de bord echilibrat: Transformați-vă datele într-o foaie de parcurs către succesDe la EverandTabloul de bord echilibrat: Transformați-vă datele într-o foaie de parcurs către succesÎncă nu există evaluări
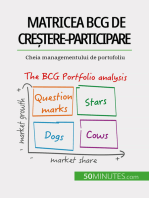
- Matricea BCG de creștere-participare: teorii și aplicații: Cheia managementului de portofoliuDe la EverandMatricea BCG de creștere-participare: teorii și aplicații: Cheia managementului de portofoliuÎncă nu există evaluări
- Metoda Six Sigma: Creșterea calității și consecvenței afacerii dvs.De la EverandMetoda Six Sigma: Creșterea calității și consecvenței afacerii dvs.Încă nu există evaluări
- Lanțul valoric al lui Michael Porter: Eliberați avantajul competitiv al companiei dvs.De la EverandLanțul valoric al lui Michael Porter: Eliberați avantajul competitiv al companiei dvs.Încă nu există evaluări
- O abordare ușoară a planului de afaceri: Ghidul practic pentru lansarea de noi proiecte și implementarea antreprenorială a ideilor de afaceriDe la EverandO abordare ușoară a planului de afaceri: Ghidul practic pentru lansarea de noi proiecte și implementarea antreprenorială a ideilor de afaceriÎncă nu există evaluări
- Lista de verificare a planului de afaceri: Planificați-vă drumul spre succesul în afaceriDe la EverandLista de verificare a planului de afaceri: Planificați-vă drumul spre succesul în afaceriEvaluare: 5 din 5 stele5/5 (1)
- Analiza SWOT: Un instrument important pentru dezvoltarea strategiilor de afaceriDe la EverandAnaliza SWOT: Un instrument important pentru dezvoltarea strategiilor de afaceriÎncă nu există evaluări
- Tema 1 - Sem 2 (Alegere Si Organizare Parlament)Document7 paginiTema 1 - Sem 2 (Alegere Si Organizare Parlament)Bogdan RaulÎncă nu există evaluări
- Test - Functia de Control ParlamentarDocument3 paginiTest - Functia de Control ParlamentarBogdan RaulÎncă nu există evaluări
- Tema 3 - Sem2 (Functia Legislativa)Document9 paginiTema 3 - Sem2 (Functia Legislativa)Bogdan RaulÎncă nu există evaluări
- Tema 2 - Sem 2 (Functionarea Parlamentului)Document4 paginiTema 2 - Sem 2 (Functionarea Parlamentului)Bogdan RaulÎncă nu există evaluări
- Maria Rezumat TezaDocument40 paginiMaria Rezumat TezaBogdan RaulÎncă nu există evaluări
- Master Thesis Kovacs MihalyDocument53 paginiMaster Thesis Kovacs MihalyfastbucurÎncă nu există evaluări
- Rezumat Rommoser PDFDocument37 paginiRezumat Rommoser PDFIsabelaValentinaÎncă nu există evaluări
- Traducere Engleza Anul II Sem 1Document4 paginiTraducere Engleza Anul II Sem 1Bogdan RaulÎncă nu există evaluări
- Master CISTDocument23 paginiMaster CISTBogdan RaulÎncă nu există evaluări
- Master CISTDocument23 paginiMaster CISTBogdan RaulÎncă nu există evaluări
- Cianamida de CalciuDocument2 paginiCianamida de CalciuBogdan RaulÎncă nu există evaluări
- Notificare SchimbareDocument1 paginăNotificare SchimbareBogdan RaulÎncă nu există evaluări
- Master CISTDocument23 paginiMaster CISTBogdan RaulÎncă nu există evaluări