Documente Academic
Documente Profesional
Documente Cultură
Noţiuni Despre Maşini de Constructie
Noţiuni Despre Maşini de Constructie
Încărcat de
Alex MateiTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Noţiuni Despre Maşini de Constructie
Noţiuni Despre Maşini de Constructie
Încărcat de
Alex MateiDrepturi de autor:
Formate disponibile
1.
NOIUNI GENERALE DESPRE MAINI
Sistemul tehnic reprezint o creaie a inteligenei umane prin intermediul cruia legile
naturii sunt modificate i utilizate n scopul deservirii muncii proprii i creterii productivitii n
aceste sens.
n stadiul actual de dezvoltare a societii, majoritatea activi
diverse domenii sunt realizate cu ajutorul mainilor.
Maina este un sistem tehnic alctuit dintr
transformrii formei de energie disponibile n energie cinetic i
corespunztor procesului tehnologic respectiv
Prile componente ale mainii sunt:
sursa motoare, mecanism/mecanisme
organ/organe de lucru
sistem de comand i control.
Mecanismul constituie partea component a mainii ce preia micarea de
transmite modificat la organul/organele de lucru.
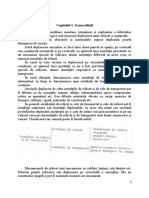
n figura 2.1. este schematizat modalitatea transmiterii micrii la un dumper pitic de 750 l
capacitate. Dumperul pitic este un utilaj de construcii folosit pentru transportul uno
ca: nisip, pietri, beton etc.
Sursa motoare/motorul (M) are rolul de a produce energie mecanic (cinetic) i de a o
transmite mai departe n lanul cinematic prin intermediul arborelui de ieire.
CURS 1
NOIUNI GENERALE DESPRE MAINI
reprezint o creaie a inteligenei umane prin intermediul cruia legile
naturii sunt modificate i utilizate n scopul deservirii muncii proprii i creterii productivitii n
n stadiul actual de dezvoltare a societii, majoritatea activitilor ce se desfoar n
diverse domenii sunt realizate cu ajutorul mainilor.
este un sistem tehnic alctuit dintr-un ansamblu de corpuri materiale n scopul
rii formei de energie disponibile n energie cinetic i producerii lucrului
tor procesului tehnologic respectiv.
e mainii sunt:
sa motoare, mecanism/mecanisme
sistem de comand i control.
constituie partea component a mainii ce preia micarea de la sursa motoare i o
transmite modificat la organul/organele de lucru.
n figura 2.1. este schematizat modalitatea transmiterii micrii la un dumper pitic de 750 l
capacitate. Dumperul pitic este un utilaj de construcii folosit pentru transportul uno
are rolul de a produce energie mecanic (cinetic) i de a o
transmite mai departe n lanul cinematic prin intermediul arborelui de ieire.
reprezint o creaie a inteligenei umane prin intermediul cruia legile
naturii sunt modificate i utilizate n scopul deservirii muncii proprii i creterii productivitii n
tilor ce se desfoar n
un ansamblu de corpuri materiale n scopul
producerii lucrului mecanic util
la sursa motoare i o
n figura 2.1. este schematizat modalitatea transmiterii micrii la un dumper pitic de 750 l
capacitate. Dumperul pitic este un utilaj de construcii folosit pentru transportul unor materiale
are rolul de a produce energie mecanic (cinetic) i de a o
Fig. 2.1. Schema transmiterii micrii la un dumper pitic de 750 l
S.C.C. sistem de comand i control; M motor; C.V. cutie de viteze;
T.C. transmisie cardanic; O.L. organ de lucru (ben); A ambreiaj; R redactor
Ambreiajul (A) are rolul de a ntrerupe micarea n lanul cinematic la schimbarea
turaiei sau a sensului de micare.
Cutia de viteze (C.V.) realizeaz alternativ mai multe rapoarte de transmitere, permind
astfel adaptarea turaiei la organul de lucru funcie de procesul tehnologic specific utilajului.
Transmisia cardanic (T.C.) realizeaz transmiterea micrii ntre doi arbori concureni
aflai n plane diferite.
Organul de lucru (O.L.) este reprezentat n figura 2.1 de ben dumperului pitic i are
rolul de a realiza procesul tehnologic de transport al pmntului la punctul de lucru.
Sistemul de comand i control (S.C.C.) are rolul de a controla parametrii funcionrii
utilajului n timpul transmiterii micrii de la motor la organul de lucru.
Mecanismul poate fi definit n sens general ca parte component a mainii. n cazul
nostru, mecanismul care ndeplinete aceast funciune este alctuit
dintr-o serie de mecanisme componente, definite n sens restrns: ambreiaj (A), cutie de viteze
(C.V.), transmisie cardanic (T.C.). Fiecare dintre acestea, la rndul lor, alctuiesc cte un
mecanism.
Clasificarea general a masinilor
a) Maini de for- maini care transform energia dintr-o form n alta, nefiind consumatoare
de energie dect n limita pierderilor inerente implicate n transformare
a.1 Maini generatoare - transform energia mecanic ntr-o alt form de energie:
Electric = generatoare electrice
Hidraulic = pompe
Pneumatic = compresoare
a.2 Maini motoare consum anumite forme de energie i produc enegie mecanic
Motoarele cu ardere intern (MAI)consum prin ardere energia
potenial termochimic a combustibilului
Motoarele electrice consum energie electric
Motoarele hidrostatice i turbinele consum energie hidraulic
b) Maini de lucru efectueaz o operaie/operaii tehnologice pe parcursul crora cedeaz
energie prin efectuarea de lucru mecanic util (L
u
). MC sunt destinate efecturii de operaii
tehnologice n lucrrile de construcii montaj
c) Maini instrument maini destinate determinrii unor anumite mrimi fizice sau a unor
corelaii ntre anumite mrimi, cu ajutorul crora se pot caracteriza proprietile fizico-
mecanice ale unor materiale, produse. Ex. Mainile de ncercat betoane i elemente
prefabricate din beton i beton-armat.
Mrimea mecanic subunitar ce caracterizeaz eficiena utilizrii energiei primare de
ctre maina respectiv = randament = raportul ntre lucrul mecanic util i lucrul mecanic
consumat sau raportul dintre energia util (furnizat la ieire) i energia primar (furnizat la
intrare):
p =
I
u
I
c
=
P
c
P
< 1
Ambreiajul (A) are rolul de a ntrerupe micarea n lanul cinematic la schimbarea
turaiei sau a sensului de micare.
Cutia de viteze (C.V.) realizeaz alternativ mai multe rapoarte de transmitere, permind
astfel adaptarea turaiei la organul de lucru funcie de procesul tehnologic specific utilajului.
Transmisia cardanic (T.C.) realizeaz transmiterea micrii ntre doi arbori concureni
aflai n plane diferite.
Organul de lucru (O.L.) este reprezentat n figura 2.1 de ben dumperului pitic i are
rolul de a realiza procesul tehnologic de transport al pmntului la punctul de lucru.
Sistemul de comand i control (S.C.C.) are rolul de a controla parametrii funcionrii
utilajului n timpul transmiterii micrii de la motor la organul de lucru.
Mecanismul poate fi definit n sens general ca parte component a mainii. n cazul
nostru, mecanismul care ndeplinete aceast funciune este alctuit
dintr-o serie de mecanisme componente, definite n sens restrns: ambreiaj (A), cutie de viteze
(C.V.), transmisie cardanic (T.C.).Fiecare dintre acestea, la rndul lor, alctuiesc cte un
mecanism.
Clasificarea general a masinilor
d) Maini de for- maini care transform energia dintr-o form n alta, nefiind consumatoare
de energie dect n limita pierderilor inerente implicate n transformare
a.1 Maini generatoare - transform energia mecanic ntr-o alt form de energie:
Electric = generatoare electrice
Hidraulic = pompe
Pneumatic = compresoare
a.2 Maini motoare consum anumite forme de energie i produc enegie mecanic
Motoarele cu ardere intern (MAI)consum prin ardere energia
potenial termochimic a combustibilului
Motoarele electrice consum energie electric
Motoarele hidrostatice i turbinele consum energie hidraulic
e) Maini de lucru efectueaz o operaie/operaii tehnologice pe parcursul crora cedeaz
energie prin efectuarea de lucru mecanic util (L
u
). MC sunt destinate efecturii de operaii
tehnologice n lucrrile de construcii montaj.
f) Maini instrument maini destinate determinrii unor anumite mrimi fizice sau a unor
corelaii ntre anumite mrimi, cu ajutorul crora se pot caracteriza proprietile fizico-
mecanice ale unor materiale, produse. Ex. Mainile de ncercat betoane i elemente
prefabricate din beton i beton-armat.
Mrimea mecanic subunitar ce caracterizeaz eficiena utilizrii energiei primare de
ctre maina respectiv = randament = raportul ntre lucrul mecanic util i lucrul mecanic
consumat sau raportul dintre energia util (furnizat la ieire) i energia primar (furnizat la
intrare):
p =
I
u
I
c
=
P
c
P
< 1
2. ALCTUIREA GENERAL DE PRINCIPIU A MC
Mainile de lucru- din cadrul crora fac parte i MC, sunt alctuite dup o
structur/schelet comun, avnd n cadrul lor subansambluri cu roluri funcionale identice sau
asemntoare:
Echipament de for
Transmisie
Echipament de lucru, cu organul de lucru
Echipament (sistem) de comand i control (supraveghere)
Structura portant
Structura de sprijin i echipament de propulsie
Echipament de securitate
Instalaii i echipamente anex
Caroserie
Echipamentul de for (EF) = maina/ansamblul de maini motoare i generatoare, cu
anexele aferente, care furnizeaz energia necesar acionrii mainii
Transmisia (Tr) = ansamblul de mecanisme i instalaii (electrice, hidraulice) care
preiau energia produs de echipamentul de for, o transform i o trimit modificat pna la
echipamentul/organul de lucru
Echipament de lucru, cuorgan de lucru (EL) = ansamblul de organe/elemente
cinematice ataat mainii cu ajutorul croa se efectueaz operaia/operaiile din cadrul procesului
tehnologic respectiv pentru care a fost destinat maina. La echipamentul de lucru este ataat
organul de lucru (OL): cup excavator/ncrctor, lam buldozer, graifer macara
Echipament comand i control (SCC)= ansamblu de dispozitive, mecanisme,
instrumente de bord, cu ajutorul crora se pornete, se manevreaz i supravegheaz funcionarea
mainii la parametrii nominali, i se oprete.
Structura portant (SP)= suport pentru toate celelalte pri ale mainii; preia
ncrcturile provenite din greutatea tuturor elementelor mainii, precum i a celor de exploatare
(ex.: greutatea sarcinii la macara, rezistena la spare a unui excavator etc.) i le transmite prin
sistemul de sprijin sau a celui de propulsie, terenului sau cii pe care lucreaz maina.
Structura de sprijin (SS) = preia ncrcrile mainii i le descarc la teren sau la calea
de rulare
Sistemul de propulsie (SP) = asigur deplasarea mainii n timpul lucrului sau la
schimbarea amplasamentului acesteia; poate fi cu: roi cu pneuri, enile, roi (rulouri) metalice,
cale de rulare cu ine etc.
Echipamentul de securitate (ES) = asigur funcionarea i exploatarea mainii n
condiii de deplin securitate. Ex.: macaralele sunt dotate cu cu limitator de sarcin un
dispozitiv cu funcionare automat care anuleaz orice comand cu excepia celei de coborre i
de depunere a sarcinii atunci cnd se ncearc ridicarea unei sarcini superioare celei admisibile.
Instalaiile i echipamentele anex= asigur confortul exploatrii mainii: instalaia de
nclzire a cabinei operatorului, de iluminat
Tipul EF se alege n funcie de sursa de energie primar disponibil i de autonomia de
deplasare necesar mainii. Astfel, n lipsa unei surse de energie primar electric, se recurge la
acionarea cu MAI. La acelai tip de acionare se recurge i n cazul mainilor care necesit
autonomie mare de deplasare, care sunt concepute ca maini fr cale de rulare proprie (cu
sistem de deplasare pe enile, pe pneuri) excavatoare universale, buldozere, automacarale.
Ansamblul EF-Tr. = sistemul de acionare (SA) a mainii. SA ale MC pot fi tip:
Diesel-mecanice = motor primar diesel i transmisie mecanic
Diesel-electrice = motor diesel+generator electric i transmisie electric
Diesel-hidraulice= motor diesel+grup pompare i transmisie hidraulic (TH)
Diesel-pneumatice= motor diesel+ compresor i transmisie pneumatic (TP)
Electro-mecanice= motor sau motoare electrice (ME) i transmisie mecanic (TM)
Electro-hidraulice= motor electric+grup pompare (P) i transmisie hidraulic (TH)
Electro-pneumatic= motor electric (ME)+compresor i transmisie pneumatic
Atunci cnd maina lucreaz mult timp pe acelai amplasament la punct fix sau pe cale
de rulare cu ine, este avantajoas acionarea electric, energia electric fiind mai ieftin, iar
distribuia ei la diferite mecanisme ale mainii mai simpl. Ex.: macarale turn, betonierele i
centralele de beton, pompele de beton sau de mortar etc.
Sistemele de acionare diesel-electrice, diesel-hidraulice i electro-hidraulice sunt sisteme
combinate.
CLASIFICAREA GENERAL A M.C.
1. Utilaje pentru lucrri de pmnt
1.1 Utilaje pentru pregtirea terenului: -scarificatoare
-tietoare de tufiuri
-extractoare de buturugi
1.2 Utilaje de spat, nivelat i transportat: - buldozere
- screpere
- autogredere
1.3 Utilaje de spat, ncrcat i transportat: - excavatoare cu o cup
1.4 ncrctoare: - cu 1/mai multe cupe
- cu frez
- cu melc
- cu discuri
1.5 Sptoare de gropi, canale i guri
1.6 Utilaje pentru compactarea terenurilor: -compactoare cu rulouri, cu pneuri mixte cu
aciune static sau dinamic (prin vibrare, prin batere i mixt)
- maiuri
1.7 Utilaje pentru finisarea terasamentelor
2. Utilaje pentru fundaii, lucrri n stnc i pentru tuneluri
2.1 Utilaje pentru nfigerea i smulgerea elementelor: - sonete
-berbeci
-vibronfigtoare
-vibroextractoare
2.2 Utilaje pentru execuia coloanelor i pereilor din beton in situ
2.3 Utilaje pentru ameliorarea terenurilor de fundare slabe
2.4 Utilaje pentru lucrri n stnc i de tuneluri
2.5 Utilaje de forat i perforat
2.6 Utilaje pentru demolri i dezafectri
3. Utilaje pentru transporturi i maipulri
3.1 Autovehicule i tractoare
3.2 Remorci i semiremorci
3.3 Mijloace de transport feroviar
3.4 Maini i instalaii de transport continuu:
-transportoare cu band; lan; raclei; cupe
-transportoare cu melc
-transportoare ineriale i vibratoare
-transportoare pneumatice
-elevatoare
-funiculare
3.5 Alte mijloace de transport
3.6 Stivuitoare: cu furci, etc.
3.7 Utilaje de descrcat: -lopei mecanice
- descrctoare de vagoane etc.
4. Utilaje pentru pregtirea agregatelor, pentru armturi i cofraje
4.1 Utileje pt. mrunirea agregatelor: -concasoare
- mori
4.2 Utilaje pentru sortarea, splarea i uscarea agregatelor: -ciururi
-clasificatoare
-spltoare
-usctoare de agregate
4.3 Utilaje pentru stingerea, prepararea i manipularea varului:- stingtoare
- fluidificatoare
4.4 Utilaje pentru prelucrat oel-beton: -maini de tiat i ndreptat OL-beton
-maini de fasonat OL-beton
4.5 Utilaje de prelucrat srm pentru beton precomprimat
4.6 Utilaje pentru prelucrarea armturilor: -maini de sudat armturi, plase i carcase
4.7 Utilaje pentru pretensionare: -instalaii de pretensionare
- prese hidraulice
- maini pt. confecionat teci pt. fascicole
- pompe pt. injectat canale de armturi
5. Utilaje pentru prepararea i punerea n oper a betoanelor i mortarelor
5.1 Utilaje pt. amestecarea betoanelor i mortarelor: -betoniere
-malaxoare de mortar
5.2 Instalaii pt. prepararea betoanelor i mortarelor: - centrale fixe sau mobile de
beton/mortar
5.3 Utilaje de depozitare i transport a betoanelor i mortarelor: -silozuri
- buncre
- containere
- bene
- autobetoniere
5.4 Utilaje pt. compactarea betoanelor: -vibratoare (de interior/ext.; mese, rigle, plci)
-instalaii de vacumare
5.5 Utilaje pt. punerea n oper a betoanelor i mortarelor:- pompe, autopompe beton
- pompe mortar
- aparate de injectat i torcretat
beton i mortar
- repartizoare de beton
- instalaii cofraje glisante
- instalaii de aburit beton
- maini de curat-uns cofraje
6. Utilaje de ridicat pentru lucrri de montaj
6.1 Mecanisme simple de ridicat: -vinciuri, palane, trolii
6.2 Ascensoare de antier: -pt. material/ persoane
6.3 Macarale: -macarale uoare de fereastr, de planeu
- macarale turn
- macarale pe enile
- macarale pe pneuri
- automacarale
- lansatoare de conducte
7. Utilaje pentru lucrri de izolaii, instalaii, finisaje i lucrri pe timp friguros
7.1 Utilaje pt. lucrri de izolaii: -pt. preparare bitumuri
-pt. aplicarea bitumuri
-pt. uscarea suprafeelor
-pt. aplicarea materialelor izolatoare i protectoare
7.2 Utilaje pt. prelucrarea materialelor de nvelitori i ventilaii:
-maini de tiat
-maini de roluit
- maini de fuit
-maini de bordurat
- maini de ncheiat faluri la tabl etc.
7.3 Utilaje pt. lucrri instalaii: -dispozitive i maini de filetat, ndoit, tiat, evazat
-dispozitive i maini de sudat evi din material plastic
7.4 Utilaje pt. lucrri de tencuieli i zugrveli: - agregate de tencuit, dricuit
-schele
7.5 Utilaje pt. lucrri de vopsitorie: -malaxoare pt. chit
-maini de amestecat chituri i vopseluri
-pistoale de injectat chit
- instalaii de vopsit prin pulverizare .a.
7.6 Utilaje pt. lucrri de pardoseli: -maini de finisat pardoseli minerale, din beton
-maini de splat
-maini de rindeluit, lefuit
-maini de lustruit pardoseli din parchet
-aspiratoare
7.7 Utilaje pt. lucrri pe timp friguros: -generatoare de aer cald, abur
-nclzitoare de ap
-instalaii de nclzire/uscare cu infraroii
8. Utilaje pentru lucrri hidrotehnice i mbuntiri funciare
8.1 Drgi maritime
8.2 Drgi fluviale
8.3 Mijloace de spat i transportat agregate
8.4 Hidromonitoare
8.5 Sonete plutitoare
8.6 Degroeze
8.7 Instalaii pt. executarea sistemelor de irigare i desecare
8.8 Instalaii pt. ntreinerea i curarea canalelor
8.9 Instalaii pt. drenaje
9. Utilaje pentru construcii i reparaii drumuri
9.1 Utilaje pt. lucrri de fundaii rutiere i pt. salubrizri
- Repartizoare de agregate
- Freze rutiere
- Distribuitoare de bitum
- Distribuitoare de ciment
9.2 Utilaje pt. preparat mixture asfaltice, la cald i la rece:
- usctoare de agregate
- topitoare de bitum
-malaxoare i instalaii pt. prepararea mixturilor asfaltice la cald/rece
9.3 Utilaje pt. mbrcmini asfaltice, penetrri i tratamente superficiale:
-repartizoare i finisoare de mixture asfaltice
-stropitoare de bitum
-autogudronatoare
-distribuitoare de criblur etc.
9.4 Utilaje pt. fundaiile drumurilor: -repartizoare i finisoare din beton
-maini de tiat rosturi n beton etc.
9.5 Utilaje pt. ntreinerea drumurilor:
- autoagregate pt. reparat i ntreinut drumuri
- autoagregate pt. curirea i colmatarea fisurilor
- autoagregate pt. mturat, deszpezit, repartizat nisip i sare .a.
10. Utilaje pentruconstrucii i reparaii ci ferate
10.1 Utilaje pentru pregtirea cii
10.2 Utilaje pentru balastarea i compactarea cii
10.3 Utilaje pentru curat prisma de balast a cii
10.4 Utilaje pentru montarea i sudarea inelor
10.5 Utilaje pentru montarea i pozarea cii
10.6 Utilaje i aparate pentru msurat i verificat calea
10.7 Utilaje pentru ntreinerea liniilor
11. Utilaje pentru montajul conductelor i liniilor de transport a energiei electrice
11.1 Maini de prelucrat pe antier evi i conducte
11.2 Utilaj pentru montat linii electrice aeriene
12. Utilaje energetice i de sudur : - compresoare de aer;
-grupuri electrogene
-redresoare i transformatoare de sudur
-generatoare de acetilen etc.
13. Unelte portabile- pt. montaj i prelucrri, pt. instalaii, pt. finisaje, pt. pardoseli
CURS 2,3
MAINI DE SPAT I NCRCAT. EXCAVATOARE
Exavatoarele= maini de c-ii (MC) utilizate la dislocarea din masiv a terenurilor, precum i
la preluarea i depunerea excavaiei ntr-un mijloc de transport sau n grmad
- sunt utilizate la executarea gropilor de fundaie a anurilor i canalelor, la
spturi pt. regularizarea cursurilor de ap, la exploatarea agregatelor minerale
n balastiere, cariere
- echipamentele de lucru dispun de una sau mai multe cupe prevzute cu dini
cu ajutorul crora se efectueaz sparea, preluarea, transportul i descrcarea
materialului la punctul de lucru
Exist o mare varietate de tipuri de excavatoare fiecare tip fiind destinat unei anume
categorii de proces de lucru i realizat, totodat, ntr-o gam larg de dimensiuni constructive
6.1. Clasificarea excavatoarelor
Criteriul general de clasificare nr. de cupe cu care este prevzut echipamentul de lucru:
- exc. cu o cup
- exc. cu mai multe cupe
Excavatoarele cu o singur cup = maini cu aciune ciclic
Excavatoarele cu m. multe cupe = maini cu aciune continuau productivitate mai
mare, dar sunt mai complexe i mai scumpe
Clasificarea excavatoarelor cu o cup
dup modul de acionare al echipamentului de lucru:
-excavatoare mecanice, la care echipamentul de lucru este acionat cu ajutorul unor
transmisii cu cabluri i a altor transmisii mecanice;
-excavatoare hidraulice, la care echipamentul de lucru este acionat cu ajutorul unor
cilindri hidraulici.
Acionarea diesel-hidrostatic s-a generalizat n cazul exc. de capacitate mic, medie i mare
Acionarea diesel-mecanic, uneori diesel-electric, se utilizeaz la exc. mari i foarte mari.
dup gradul de universalitate:
-excavatoare cu destinaie special prevzute cu un singur echipament de lucru, la care
se pot ataa eventual una sau mai multe tipuri de cupe specializate
- excavatoareuniversale pot fi echipate cu mai multe tipuri de echipamente de lucru =
echipamente de schimbpot lucra cu echip. de cup dreapt, cup
ntoars, de draglin, de graifer, de macara
dup tipul echipamentului de lucru:
-excavatoare cu cup dreapt, care sap de regul deasupra nivelului de sprijin al
mainii;
-excavatoare cu cup invers, care sap de regul sub nivelul de sprijin al mainii;
-excavatoare cu draglin, prevzut cu o cup manevrat cu cabluri i lanuri;
-excavatoare cu bra telescopic.
dup sistemul de deplasare:
-excavatoare pe enile;
-excavatoare pe pneuri;
-excavatoare deplasabile pe ine;
-excavatoare pitoare;
-excavatoare plutitoare.
6.2. Construcia i funcionarea excavatoarelor mecanice
6.3.1 Excavator mecanic cu cup dreapt
n figura 6.1 se prezint schema i principalele pri componente ale unui excavator
mecanic cu cup dreapt.
O particularitate a acestui excavator este existena ghidajului articulat al mnerului i a
mecanismului de mpingere-retragere a mnerului, care asigur nfigerea i scoaterea cupei din
pmnt, precum i reglarea grosimii brazdei n timpul sparii.
De asemenea cupa este montat rigid pe mner i se descarc prin deschiderea peretelui
basculant al cupei.
Excavatorul mecanic cu cup dreapt funcioneaz dup un ciclu de lucru, care cuprinde
urmtoarele faze:
-sparea pmntului prin ridicarea cupei (dup nfigerea cupei n pmnt);
-scoaterea cupei din pmnt i ridicarea acesteia;
-rotirea platformei cu echipamentul de lucru cu cupa plin;
-descrcarea cupei prin bascularea peretelui inferior al cupei;
-rotirea platformei cu echipamentul de lucru cu cupa goal;
-coborrea cupei n poziia de nceput a sprii, nfigerea cupei n pmnt i nchiderea
peretelui basculant al cupei.
Fig.6.1. Excavator mecanic cu bra monobloc cu cup dreapt
1 - sistem de deplasare pe enile; 2 platform rotitoare; 3
ghidaj articulat; 6 mecanism de mpingere a mnerului; 7
cup; 10 mecanism de ridicare a cupei; 11
6.3.2. Excavator cu draglin
n figura 6.11 se prezint schema i principalele pri componente ale unui excavator cu
draglin. Draglina se caracterizeaz printr
sistem de cabluri i lanuri, care servesc i la manevrarea cupei.
Draglina are avantajul realizrii unor raze de aciune i a unor adncimi de spare mai
mari ca excavatorul cu cup dreapt i invers. nfigerea cupei n pmnt se realizeaz sub
aciunea greutii cupei, iar sparea se realizeaz prin tragerea cupei, astfel c draglina se
utilizeaz doar la sparea n pmnturi slabe i mai ales la extragerea balastului din albi
Datorit construciei cupei (fig.6
spa i sub nivelul apei.
Ciclul de lucru al draglinei
-sparea pmntului prin tragerea cupei i umplere
poziia II;
-scoaterea cupei din pmnt prin acionarea cablului de ridicare a cupei (poziia III);
-ridicarea cupei din poziia III n poziia IV cu ajutorul cab
frnat a cablului de tragere de pe toba de tragere;
-rotirea platformei cu cupa plin;
-descrcarea cupei prin basculare ca urmare a defrnrii cablului de tragere;
-rotirea platformei cu cupa goal;
xcavator mecanic cu bra monobloc cu cup dreapt
platform rotitoare; 3 sistem de rezemare a platformei rotitoare;
mecanism de mpingere a mnerului; 7 mner; 8 peretele inferior basculant al cupei; 9
mecanism de ridicare a cupei; 11 mecanism de manevrare a braului.
.11 se prezint schema i principalele pri componente ale unui excavator cu
caracterizeaz printr-o fixare flexibil a cupei la bra prin intermediul unui
sistem de cabluri i lanuri, care servesc i la manevrarea cupei.
Draglina are avantajul realizrii unor raze de aciune i a unor adncimi de spare mai
cup dreapt i invers. nfigerea cupei n pmnt se realizeaz sub
aciunea greutii cupei, iar sparea se realizeaz prin tragerea cupei, astfel c draglina se
utilizeaz doar la sparea n pmnturi slabe i mai ales la extragerea balastului din albi
orit construciei cupei (fig.6.12) i manevrrii acesteia cu cabluri i lanuri, draglina poate
Ciclul de lucru al draglinei cuprinde urmtoarele faze (fig.6.11):
sparea pmntului prin tragerea cupei i umplerea cupei cu pmnt din poziia poziia I n
scoaterea cupei din pmnt prin acionarea cablului de ridicare a cupei (poziia III);
ridicarea cupei din poziia III n poziia IV cu ajutorul cablului de ridicare, cu desfurarea
ui de tragere de pe toba de tragere;
rotirea platformei cu cupa plin;
descrcarea cupei prin basculare ca urmare a defrnrii cablului de tragere;
rotirea platformei cu cupa goal;
sistem de rezemare a platformei rotitoare; 4 bra; 5
rior basculant al cupei; 9
.11 se prezint schema i principalele pri componente ale unui excavator cu
o fixare flexibil a cupei la bra prin intermediul unui
Draglina are avantajul realizrii unor raze de aciune i a unor adncimi de spare mai
cup dreapt i invers. nfigerea cupei n pmnt se realizeaz sub
aciunea greutii cupei, iar sparea se realizeaz prin tragerea cupei, astfel c draglina se
utilizeaz doar la sparea n pmnturi slabe i mai ales la extragerea balastului din albia rurilor.
uri, draglina poate
a cupei cu pmnt din poziia poziia I n
scoaterea cupei din pmnt prin acionarea cablului de ridicare a cupei (poziia III);
ului de ridicare, cu desfurarea
-cderea cupei prin desfurarea de pe tob a cablului de ridicare (poziia V), ncheiat prin
nfigerea muchiei tietoare a cupei n pmnt.
Fig.6.11. Excavator cu draglin
1 main de baz pe enile cu platform rotitoare; 2 bra; 3 cup; 4 cablu de tragere a cupei; 5 lanuri de
tragere; 6 lanuri de ridicare; 7 cablu de echilibrare; 8 cablu de ridicare a cupei; 9 dispozitiv de ghidare a
cablului de tragere; 10 troliul principal cu dou tobe (toba de tragere i toba de ridicare a cupei);11 cablu pentru
manevrarea braului;12 rola de echilibrare; I V poziii ale cupei n timpul ciclului de lucru.
Pentru acionarea excavatorului cu draglin se folosete de regul sistemul diesel-hidraulic, cu
motor diesel ce pune n micare mai multe pompe hidraulice, iar acestea alimenteaz motoarele
hidraulice rotative ale mecanismelor de deplasare i rotire, precum i motoarele hidraulice
rotative pentru acionarea troliilor draglinei.
6.4. Excavatoare hidraulice
La excavatoarele hidraulice echipamentul de lucru este acionat cu ajutorul unor cilindri
hidraulici. Dup construcia echipamentului de lucru, sunt urmtoarele tipuri de excavatoare
hidraulice:
- excavatoare hidraulice cu cup invers;
- excavatoare hidraulice cu cup dreapt;
- excavatoare hidraulice cu bra telescopic.
6.4.1.Excavatoare hidraulice cu cup invers
Aceste excavatoare sap de regul sub nivelul de sprijin al mainii de baz, prin
deplasarea cupei spre maina de baz. Schema i prile componente ale excavatorului cu cup
invers sunt date n figura 6.17.
Fig.6.17.Excavator hidraulic cu cup invers
1 sistem de deplasare; 2 platform rotitoare; 3 bra; 4 mner; 5 cup;
6 mecanism manevrare bra; 7 - mecanism manevrare mner; 8 - mecanism manevrare cup.
Sparea se execut de regul prin bascularea ansamblului mner-cup fa de
articulaia bra-mner cu ajutorul cilindrului 7 pentru manevrarea mnerului. n pmnturi slabe,
sparea se poate realiza prin acionarea cupei cu ajutorul cilindrului 8 prin intermediul unor bare
articulate, care asigur creterea unghiului de basculare a cupei. Descrcarea materialului din
cup se realizeaz prin bascularea cupei.
Mecanismul de rotire a platformei excavatorului este format din motor hidraulic, frn normal
nchis, reductor, pinion, montate pe partea rotitoare, precum i coroana dinat montat pe inelul
nerotitor al rulmentului de sprijin al platformei. Pe platforma rotitoare se mai afl i motorul
diesel, grupul de pompe, aparatajul hidraulic, cabina cu sistemul de comand i control,
echipamentul de lucru format din bra, mner i cup.Pe lng excavatoarele de capacitate mare
i medie, o larg utilizare au cptat i excavatoarele hidraulice de mic capacitate
(miniexcavatoare), care asigur importante avantaje pentru lucrri de volum mic , n spaii
nguste.Miniexcavatoarele sunt prevzute cu un mecanism de rotire suplimentar, care permite
rotirea braului fa de platforma rotitoare, asigurnd posibilitatea de spare n imediata apropiere
a construciilor.
De asemenea se manifest tendina echiprii excavatoarelor cu diferite organe de lucru, mai ales
la excavatoarele de mic capacitate: cupe de diferite dimensiuni ,ciocan hidraulic, echipament
pentru lucrri de demolare a construciilor ,burghiu pentru forarea gurilor n pmnt ,i altele.
O larg rspndire a cptat n ultimii ani ncrctorul-excavator (buldoexcavatorul), prevzut
att cu echipament de ncrctor (buldozer) n partea din fa a mainii de baz, ct i cu
echipament de excavator cu cup invers n partea din spate . Pentru condiii speciale de lucru s-
au realizat excavatoare speciale, care se poate utiliza la sparea pe teren accidentat.
6.4.2. Excavatoare hidraulice cu cup dreapt
Aceste excavatoare sap de regul deasupra nivelului de sprijin al mainii de baz, prin
deprtarea cupei fa de maina de baz. Schema i prile componente ale excavatorului cu cup
dreapt sunt date n figura 6.32.
Fig.6.32. Excavator hidraulic cu cup dreapt
1 - sistem de deplasare; 2 platform rotitoare; 3 bra; 4 mner; 5 cup (realizat din dou pri articulate); 6
cilindri manevrare bra; 7 cilindru manevrare mner; 8 cilindru manevrare cup.
Specific acestor excavatoare este faptul c descrcarea cupei se realizeaz prin
deschiderea acesteia, basculndu-se partea din fa a cupei n raport cu peretele posterior al cupei
cu ajutorul a doi cilindri hidraulici montai pe peretele posterior.
Excavatoarele hidraulice cu cupa dreapt se utilizeaz mai ales la capaciti mari, n cariere,
pentru preluarea i ncrcarea materialului n mijloace de transport.
6.4.3. Excavatoare cu bra telescopic
Excavatoarele cu bra telescopic se folosesc pentru lucrri de finisare a spturii,
asigurnd o micare de translaie a cupei prin telescoparea braului i avnd i posibilitatea rotirii
cupei n jurul axului braului. Schema i diagrama de spare a unui astfel de excavator se indic
n figura 6.37.
La unele variante tronsonul mobil al braului mpreun cu cupa se pot roti n jurul axului
braului, dar la majoritatea excavatoarelor cu bra telescopic se poate roti numai cupa n raport cu
axul braului, pe lng micarea de basculare a cupei, caracteristic tuturor excavatoarelor
hidraulice.
6.5. Excavatoare cu aciune continu
Excavatoarele cu aciune continu sunt maini de spat care realizeaz sparea, ridicarea
i descrcarea pmntului n mod continuu. Dupa modul de spare se clasific astfel:
a)Excavatoare cu spare transversal, la care echipamentul de lucru cu lan portcupe
este amplasat perpendicular pe direcia de deplasare a mainii. Se utilizeaz la sparea taluzelor,
extragerea materialului n cariere, extragerea argilei n depozitele fabricilor de crmizi.
b)Excavatoare cu spare longitudinal la care echipamentul de lucru este amplasat n
planul longitudinal de simetrie al mainii.Se utilizeaz la sparea anurilor, a canalelor de
irigaii.
c) Excavatoare cu spare radial la care sparea se execut prin rotirea unei roi
portcupe simultan cu rotirea ntregului echipament n plan orizontal cu turaie foarte mic. Se
utilizeaz la extragerea materialului n cariere.
6.5.1.Excavatoare cu spare longitudinal (sptoare de anuri)
Dup construcia echipamentului de lucru, excavatoarele cu spare longitudinal se
clasific astfel:
-excavatoare cu bra i lan cu variantele:
-lan portcupe
-lan cu cuite plane i raclei
-lan cu cuite curbe
-lan cu dini sau cu plci prevzute cu dini
-excavatoare cu roat portcupe
Dup sistemul de descrcare a pmntului se clasific astfel:
-descrcare cu transportor cu band
-descrcare cu transportor elicoidal
Pe lng sparea anurilor, unele excavatoare cu spare longitudinal pot realiza i
instalarea conductelor flexibile sau a cablurilor n pmnt.
Sptoare de anuri cu lan portcupe
n figura 6.40 se prezint schema sptorului de anuri cu lan portcupe. Sparea se
realizeaz prin acionarea lanului cu cupe simultan cu deplasarea mainii cu vitez foarte mic.
Pmntul tiat de cupele 4 se ncarc n cupe, este ridicat i se descarc din cupe pe transportorul
cu band 9, n poziia n care cupele trec peste roile de lan motoare 5. Pmntul este descrcat
lateral de ctre transportor, formndu-se o prism de pmnt de-a lungul anului. Reglarea
adncimii anului i trecerea echipamentului din poziia de spare n poziia de transport se
realizeaz cu ajutorul cilindrilor hidraulici 8, care asigur bascularea braului n jurul articulaiei
braului la asiu.
Fig.6.40. Excavator cu spare longitudinal cu lanuri portcupe
1- masin de baz pe enile; 2 bra; 3 lanuri portcupe; 4 cupe; 5 - mecanism actionare lan; 6 roi de
ntindere; 7 roi de sprijin; 8 mecanism manevrare bra;9 transportor cu band; v
l
viteza lanului; v
d
viteza
de deplasare a mainii (v
d
<<v
l
);v
t
viteza benzii transportoare; H adncimea anului; B laimea anului.
Sptoare de anuri cu lan port-cuite
n locul echipamentelor cu lanuri portcupe, mai ales la limi reduse ale anului se pot
utiliza echipamente cu lan, cuite i raclei . Echipamentul de lucru are un singur lan, pe care se
fixeaz cuitele i racleii: funcia de tiere este realizat de cuite, iar cea de ridicare a
pmntului este ndeplinit de raclei. n cazul utilizrii cuitelor curbe, la viteze mari ale lanului
racleii se pot elimina , cuitele curbe ndeplinind i funcia de tiere i cea de ridicare.
Fig.6.44. Excavator cu spare longitudinal cu lan portcuite: a)vedere de ansamblu; b)schema
echipamentului de lucru (vedere de sus)
1-maina de baz; 2 cadrul echipamentului de lucru (bra); 3 mecanism manevrare bra; 4 lan; 5 roat
ntindere lan; 6 roat antrenare lan; 7 cuite; 8 raclei; 9- roat de lan pentru acionarea transportorului; 10
transportor elicoidal; 11 role de sprijin a lanului; 12 echipament auxiliar (lam de buldozer);13- mecanism de
acionare lan; O articulaia braului;
l
v viteza lanului;
d
v viteza de deplasare a mainii ) (
l d
v v .
n figura 6.44 se prezint schema unui sptor de anuri cu cuite i raclei i principalele pri
componente ale echipamentului de lucru. Transportorul elicoidal pentru evacuarea lateral a
pmntului este antrenat chiar de ctre lan i este montat pe bra. Cuitele sunt aezate la diferite
distane fa de axa lanului pentru a asigura tierea pmntului pe ntreaga lime a antului.
Sptoare de anuri cu lan cu dini
Pentru sparea anurilor n pmnturi tari i chiar n roci, se utilizeaz echipamente cu lan,
pe care se monteaz dini la diferite distane fat de axa lanului.
Sptoare de anuri cu roat portcupe
Un alt tip de echipament pentru sparea anurilor este echipamentul cu roat portcupe cu
variantele roat n consol i roat sprijinit. n figura 6.48 se prezint schema sptorului de
anuri cu roat sprijinit.
Sparea se realizeaz prin rotirea roii cu cupe i deplasarea mainii cu vitez redus. Rotirea
roii se face cu un angrenaj special rezistent la uzur, coroana dinat fiind fixat chiar pe roat.
Manevrarea roii pe vertical se realizeaz cu ajutorul unui mecanism cu cilindri hidraulici i
lanuri.
Fig.6.48. Excavator cu spare longitudinal cu roat port-cupe
1 main de baz; 2 roat port-cupe; 3 cupe; 4 cadru de sprijin; 5 role de sprijin; 6 role de ghidare; 7
ghidaje montate pe maina de baz; 8 lan pentru ridicarea echipamentului; 9 cilindrul mecanismului de
manevrare a roii; 10 nivelator; 11 transportor cu band; 12 mecanism de acionare a roii (cu pinion i
coroan dinat montat pe roata portcupe); 13 roat de sprijin; 14 mecanism de ridicare a prii din spate a
echipamentului de lucru.
6.6.Productivitatea excavatoarelor cu o singur cup
n cazul MC se definesc trei tipuri de productiviti:
- productivitatea teoretic (P
t
) = realizabil n condiii ideale (maina lucreaz la
capacitate nominal a OL, nentrerupt, pe toat durata schimbului de lucru
- productivitatea tehnic (P) = se realizeaz n cazul lucrului nentrerupt, la capacitate
efectiv, n condiii de lucru, cu materialul real
- productivitatea de exploatare (P
e
) = ia n calcul i ntreruperile funcionale de
natur organizatoric i a celor de natur tehnologic
Productivitatea de exploatare a excavatoarelor cu o singur cup= volumul cavitii
realizate prin spare:
6.5.3. Excavatoare cu mai multe cupe cu spare radial
6.5.2. Excavatoare cu mai multe cupe cu spare transversal
Fig. 6.5.3. Organizarea ideal a traseului autobasculantei la punctual de lucru.
Fig. 6.53.
1-abataj; 2 excavator; 3-bra excavator cu cupa n poziie descrcare; 4-autobsculant; 5-sens rotire platform
excavator; 6-traseu acces autobasculant la pct. de lucru
7. MAINI DE SPAT, NIVELAT, TRANSPORTAT BULDOZERE
Buldozerele sunt maini de spat i transportat, care au ca organ de lucru o lam montat
n partea din fa a mainii. Sparea se realizeaz prin deplasarea mainii. Lama se nfige n
pmnt sub aciunea forei din cilindrii hidraulici de manevrare a echipamentului i a greutii
acestuia. Pmntul spat prin deplasarea mainii se aglomereaz n faa lamei, formnd o prism
de pmnt.
Buldozerele se utilizeaz la executarea lucrrilor de terasamente pentru drumuri, ci
ferate, la pregtirea terenului pentru lucrri de construcii, la nivelarea terenurilor, la umplerea
gropilor, astuparea anurilor, curarea zpezii i alte lucrri.
Clasificarea buldozerelor:
-dup mecanismul de deplasare:
1 2 3 4
5 6
a)buldozere pe enile, caracterizate prin for de aderen mai mare, presiune mai
mic pe teren i stabilitate mai bun;
b)buldozere pe pneuri cu asiu rigid sau asiu articulat, caracterizate prin viteze de
deplasare mai mari
-dup transmisia mecanismului de deplasare:
a)buldozere cu transmisie hidromecanic;
b)buldozere cu transmisie hidrostatic;
c) buldozere cu transmisie mecanic.
-dup construcia echipamentului de lucru:
a)buldozere cu lam fix;
b)buldozere cu lam orientabil.
-dup construcia mecanismului de manevrare a echipamentului:
a)buldozere cu cilindri fixai pe capota motorului;
b)buldozere cu cilindri fixai pe cadrul enilelor;
c)buldozere cu cilindri fixai lateral.
Principalii parametri ai buldozerelor sunt:
-masa mainii;
-fora de traciune maxim;
-lungimea, nlimea i profilul lamei;
-volumul prismei de pmnt din faa lamei;
-nlimea maxim de ridicare a lamei;
-adncimea maxim de spare;
-domeniul vitezelor de deplasare;
-dimensiuni de gabarit.
Construcia i funcionarea buldozerelor
Fig.7.1.Buldozer pe enile de putere mic cu cilindrii hidraulici fixai pe cadrul enilelor
1 maina de baz; 2 lam; 3 cadru; 4 articulatia cadrului la maina de baz; 5 cilindrii hidraulici pentru
manevrarea echipamentului; 6 tije reglabile; 7 urechi fixate pe cadrul enilelor.
Fig.7.2. Buldozer pe enile cu cilindrii hidraulici montai lateral
1 maina de baz; 2 lam; 3 cadru; 4 articulatia cadrului la maina de baz; 5 cilindrii hidraulici pentru
manevrarea echipamentului; 6 tije reglabile; 7 urechi fixate pe cadrul enilelor; 8 prghii; 9 tije.
Fig.7.3. Buldozer cu lam orientabil cu cilindrii hidraulici montai pe capota motorului.
a) vedere de ansamblu; b) vedere de sus a echipamentului.
1 maina de baz; 2 lam; 3 cadru; 4 cilindri hidraulici; 5,6 tije articulate; 7 articulaia cadrului la maina
de baz; 8 urechi pentru fixarea tijelor articulate la cadru; 9 urechi pentru fixarea cilindrilor hidraulici la cadru;
10 articulaie sferic; 11 boluri
Buldozerele pot fi dotate cu lam fix ca n figurile 7.1 i 7.2 sau cu lam orientabil.
n schema din figura 7.3 se prezint un buldozer cu lam orientabil cu cadru n form de U, la
care schimbarea poziiei lamei n plan orizontal se realizeaz prin demontarea bolurilor 11 de
fixare a tijelor 5 i 6 la cadrul 3, rotirea lamei in jurul articulaiei 10 i montarea bolurilor n alte
urechi. Se obin trei poziii ale lamei n plan orizontal; n poziia n care lama este perpendicular
pe direcia de deplasare pmntul spat poate fi transportat pe distane mici (de la civa metri
pn la cteva zeci de metri), iar dac lama este rotit spre stnga sau spre dreapta, pmntul
spat este deplasat lateral.Exist i buldozere la care manevrarea lamei n plan orizontal, precum
i nclinarea n plan vertical se realizeaz cu ajutorul unor cilindri hidraulici.La un astfel de
buldozer schimbarea poziiei lamei se poate realiza foarte uor, din cabin, fr a fi necesare
operaii suplimentare ca la buldozerul cu lam orientabil.Pentru protejarea roilor motoare firma
Caterpillar folosete soluia cu ridicarea roilor motoare mult deasupra nivelului terenului. n
aceeai figur se observ:
-supranlarea lamei pentru creterea volumului prismei de pmnt;
-nlocuirea unei bare de rigidizare cu un cilindru hidraulic n vederea nclinrii lamei n
plan vertical cu ajutorul acestui cilindru;
- fixarea cilindrilor hidraulici la capota motorului printr-o articulaie dubl.
Fig.7.8. Scheme pentru echipamentul de scarificator
a). Scarificatorul simplu; b) Scarificatorul cu mecanism paralelogram
1 maina de baz; 2 suport de fixare la maina de baz; 3 cadru; 4 travers; 5 dini; 6 cilindri hidraulici
pentru manevrarea echipamentului ; 7 - cilindri hidraulici pentru reglarea unghiului de scarificare.
n mod frecvent buldozerele sunt prevazute i cu un echipament de scarificator amplasat
n partea din spate a mainii. n figura 7.8 se prezint scheme pentru dou variante de
scarificator: scarificatorul simplu i scarificatorul cu mecanism paralelogram, care are
avantajul c asigur meninerea constant a unghiului de scarificare la diferite adncimi de
scarificare.
n ultimii ani la buldozerele pe enile se utilizeaz tot mai mult transmisia hidrostatic la
mecanismul de deplasare cu pompe cu debit reglabil i motoare hidrostatice cu volum geometric
reglabil, precum i sisteme automate de reglaj, care asigur reglarea automat a vitezei de
deplasare funcie de rezistena la deplasare i meninerea motorului diesel n zona turaiei
nominale, asigurnd un consum optim de combustibil i evitnd suprancrcarea
motorului.Caracteristica de traciune a buldozerului cu transmisie hidrostatic.Se asigur
simplificarea construciei mainii prin eliminarea convertizorului hidraulic de cuplu i a cutiei de
viteze cu ambreiaje de friciune i frne cu discuri pentru schimbarea vitezelor n sarcin. n
cazul transmisiei hidrostatice, fiecare enil este acionat separat de un motor hidraulic rotativ
prin transmisii mecanice.Pe lng buldozerele pe enile, care asigur fore mari de traciune,
stabilitate bun i presiune pe teren redus, se utilizeaz uneori i buldozere pe pneuri, care se
pot deplasa pe drumurile publice de la un antier la altul i realizeaz viteze de deplasare mult
mai mari dect buldozerele pe senile.
Utilizarea electronicii i automaticii la acionarea buldozerelor
Electronica joac un rol important n dezvoltarea mainilor de spat moderne, asigurnd
utilizarea cu eficien maxim a motorului diesel i a sistemului hidraulic. A trecut timpul n care
mecanicul avea controlul complet asupra mainii i se accentueaz tendina de a se realiza
controlul sistemului motor diesel- instalaie hidraulic de ctre microprocessor.
Microprocesorul stabilete turaia motorului diesel i debitul pompelor n funcie de
condiiile de lucru, asigurndu-se creterea productivitii, reducerea consumului de combustibil,
manevrarea lin, fr ocuri a mecanismelor, reducerea uzurii componentelor mainii, reducerea
cheltuielilor de mentenan i reparaii i n final un cost unitar mai mic al lucrrii.
n funcie de semnalele de intrare primite, microcontrolerul optimizeaz regimul de lucru
al motorului diesel i genereaz semnale de comand pentru distribuitoarele cu comand
electric, care regleaz funcionarea pompelor i motoarelor hidraulice.
Microcontrolerul se regleaz nainte de nceperea procesului de lucru, selectnd un
anumit mod de lucru, ca de exemplu funcionarea n regim manual sau automat, direcia de
deplasare, creterea sau reducerea vitezei de deplasare, efectuarea virajului.
Pentru reglarea pompelor i motoarelor hidraulice se utilizeaz distribuitoare
electrohidraulice cu electromagnei proporionali, care primesc semnale de comand de la
microcontroler. La viraj motoarele hidraulice stnga i dreapta primesc semnale de comand
diferite funcie de raza de viraj dorit.
La cerere se poate realiza i o diagnosticare a strii tehnice a mainii; se afieaz
principalii parametri i, n caz de necesitate, sistemul electronic avertizeaz mecanicul asupra
necesitii efecturii unor operaii de ntreinere, iar n caz de pericol imediat realizeaz oprirea
automat a mainii.
Un alt exemplu de utilizare a electronicii, larg folosit n prezent, este sistemul automat de
supraveghere, numit EMS (Electronic Monitoring System), care informeaz permanent
mecanicul, prin afiare pe un ecran aflat la bord, asupra valorilor unor parametri importani ai
mainii.
Privind sistemul de comand al echipamentului de lucru se menioneaz urmtoarele
perfecionri:
-posibilitatea de control a vitezei mecanismului comandat n funcie de poziia manetei
de comand a distribuitorului hidraulic, utiliznd sistemul de reglare automat denumit load
sensing, care asigur variaia liniar a debitului pompei cu deplasarea sertarului distribuitorului
la un randament acceptabil al sistemului;
-posibilitatea de control a deplasrii organului acionat, utiliznd un sistem cu control
proporional de presiune, denumit PPC (Proportional Presure Control), care asigur o micare a
cilindrului hidraulic acionat proporional cu micarea manetei de comand;
-utilizarea unor manete multifuncionale (joystick), care uureaz mult munca
mecanicului;
- reglarea automat a poziiei lamei la lucrri de nivelare cu ajutorul unor sisteme
bazate pe laser compuse din emitor laser rotativ 1, receptoare laser 2, care emit semnale de
comand pentru cilindrii hidraulici ai echipamentului de lucru i care sunt montate pe tije
telescopice 3, care pot fi reglate din cabin;
-controlul poziiei lamei prin radio utiliznd sistemul GPS
Puterea motorului de acionare:
-este corelat cu masa proprie a mainii
-determin fora de traciune maxim la nivelul enilelor
n concluzie, masa proprie a mainii de baz (tractorul), ca i cea a echipamentului de
lucru, influeneaz performanele buldozerului.
Presiunea exercitat de enile pe sol nu depete 1,2.1,3 daN/cm
2
. Aceast valoare
servete la alegerea dimensiunilor enilelor.
Puterea motoarelor buldozerelor variaz n intervalul: 45 CP (33 kW) buldozere
mici..150-180 CP buldozere mari, ajungnd pn la 700 CP la buldozere f. mari.
(1 kW= 1,34 CP)
Buldozerele cu sistem de deplasare pe enile au cel puin dou viteze:
- o vitez de lucru, mai mic: 46 km/h
- o vitez de deplasare : dublu ca valoare fa de cea precedent
Productivitatea buldozerelor: se exprim n -[m
3
/h] la spare, decopertare,
repartizare [m
2
/h] la nivelare
Spare:P
c
=
3600v
P
k
P
k
t
1
C
(m
3
/h) (7.7)
Nivelare: P
c
= 1uuu k
S
I :
S
t
S
1
C
k
t
[m
2
/h]
CURS 5
8. Autogredere
Autogrederele sunt maini de spat i transportat pe pneuri prevzute cu o lam cu o mare
mobilitate amplasat n zona de mijloc a mainii. Lama autogrederului poate avea urmtoarele
micari: deplasare pe vertical, nclinare n plan vertical, rotirea lamei cu 360 grade, deplasarea
lateral a lamei, deplasarea lateral a ntregului echipament.
Autogrederele se utilizeaz la construcia drumurilor, sparea rigolelor de scurgere pe
marginea drumurilor, repararea i ntreinerea drumurilor, nivelarea platformelor, curarea
zpezii.
Clasificarea autogrederelor
-dup schema roilor: A x B x C,
n care A este numrul de perechi de roi de direcie, B - numrul de perechi de roi motoare,
C - numrul total de perechi de roi (dou perechi de roi sau trei perechi de roi)
Autogrederele cu toate roile de direcie asigur raz de viraj minim, iar autogrederele cu toate
roile motoare asigur for maxim de traciune.
-dup construcia asiului: a) autogredere cu asiu rigid
b) autogredere cu asiu articulat
-dup transmisia mecanismului de deplasare:
a)autogredere cu transmisie hidromecanic;
b)autogredere cu transmisie combinat (hidromecanic la roile din spate i hidrostatic la
roile din fa);
c)autogredere cu transmisie hidrostatic
d)autogredere cu transmisie mecanic (foarte rar folosite n prezent)
Construcia i funcionarea autogrederelor
n figura 8.1 se prezint schema unui autogreder cu trei perechi de roi. Echipamentul de
autogreder se compune din cadrul de traciune 5 fixat prin articulaia sferic 6 la cadrul principal
al mainii, lama 4, mecanismul de rotire a lamei 14, cilindri 10 de manevrare pe vertical a
echipamentului, cilindru 11 de deplasare lateral a echipamentului, mecanism de deplasare
lateral a lamei 17, dispozitiv pentru modificarea unghiului de spare 16. Roile din spate sunt
montate pe balansiere 9, iar roile de direcie sunt prevzute cu mecanism de direcie comandat
de la volanul din cabina de comand. De asemenea roile de direcie din fa sunt prevzute cu un
mecanism specific autogrederelor i anume mecanismul de nclinare a roilor n plan vertical,
care are schema din figura 8.2. Acest mecanism asigur ncrcarea egal a roilor din fa chiar
pe teren cu nclinare transversal, mbuntete stabilitatea mainii pe direcie transversal i
reduce rezistenele la viraj.
Fig.8.1. Schema autogrederului
a) vedere de ansamblu; b) vedere a echipamentului din spatele lamei
1 grup acionare cu motor diesel, transmisia mecanismului de deplasare, instalaie hidraulic; 2 cabina cu
sistemul de comand; 3 cadrul principal; 4 lama; 5 cadrul de tractiune; 6 articulaie sferic; 7 puntea
fa cu mecanism de direcie i mecanism de nclinare a roilor n plan vertical; 8 roi spate; 9 balansier; 10
cilindri de manevrare pe vertical a echipamentului; 11 cilindru pentru deplasarea lateral a echipamentului;
12 cercul de rotire; 13 suporii cercului de rotire; 14 mecanism de rotire; 15 console montate pe cercul
de rotire; 16 plci pentru modificarea unghiului de spare; 17 cilindru pentru deplasarea lateral a lamei; 18
ghidaje montate pe lam;
Fig.8.2. Autogreder - mecanismul de nclinare a roilor n plan vertical
n figura 8.3 se prezint un autogreder cu schema roilor 1x 2 x 3, care realizeaz sparea
i deplasarea lateral a pmntului spat.
Prin deplasarea lateral a echipamentului de lucru i deplasarea lateral a lamei se obine poziia
de lucru pentru sparea pmntului n afara prii carosabile a drumului . Se observ i
deplasarea lateral a roilor din fa n raport cu roile din spate, autogrederul fiind prevzut cu
asiu articulat.
Autogrederul cu asiu articulat are trei posibiliti de deplasare:
a) deplasare normal n linie dreapt;
b) deplasarea n curb, cnd asiul fa este rotit n raport cu asiul spate, fiind rotite i
roile de direcie pentru obinerea razei minime de viraj;
c) deplasare n linie dreapt cu roile fa decalate lateral fa de cele din spate.
Deplasarea n linie dreapt cu roile fa decalate lateral fa de cele din spate
Pentru realizarea acestor poziii ale lamei se adopt urmtoarele soluii constructive
pentru echipamentul de lucru al autogrederului
-articulaie sferic ntre cadrul de traciune i cadrul principal;
-articulaii duble la fixarea celor trei cilindri hidraulici de manevrare a cadrului de traciune;
aceti cilindri se sprijin pe un suport rotitor sau pe un sistem de bare articulate
-articulaii sferice la tijele cilindrilor hidraulici;
-mecanism de deplasare lateral a lamei cu cilindru hidraulic i cu sistem de ghidare a lamei pe
consolele fixate pe cercul de rotire
Reglarea unghiului de spare al lamei se realizeaz cu un dispozitiv manual cu urub- piuli
sau cu ajutorul unui cilindru hidraulic .
Deoarece autogrederul lucreaz frecvent pe teren cu nclinare transversal, puntea fa este
prevzut n afar de mecanismul de direcie i cu un mecanism de nclinare a roilor n plan
vertical . Acest mecanism asigur ncrcarea egal a roilor din fa i pe teren cu nclinare
transversal, determin creterea stabilitii mainii pe direcie transversal i reducerea
rezistentelor la viraj.
De asemenea puntea fa a autogrederului este montat articulat la cadrul principal pentru a se
asigura cerina ca autogrederul s sprijine pe toate roile la trecerea peste denivelrile terenului.
n plus pentru ndeplinirea acestei cerine la roile din spate se adopt soluia cu balansiere.
La autogrederele modern - cu toate roile motoare, roile din spate sunt acionate printr-o
transmisie hidromecanic cu convertizor hidraulic de cuplu, iar la roile din fa se utlizeaz o
acionare hidrostatic cu motor hidraulic rotativ
Autogrederele sunt prevzute i cu echipamente auxiliare, ca de exemplu echipament de
scarificatorsau echipament de buldozer.
9. SCREPERE
Definire. Domeniu de utilizare
Screperele sunt maini de spat i transportat pe pneuri, prevzute cu o cup montat
ntre puntea fa i puntea spate a mainii. Sparea i umplerea cupei cu pmnt se realizeaz
prin deplasarea mainii. Distana de transport a pmntului poate ajunge pn la 5 km. Se
utilizeaz la lucrri de terasamente la drumuri, ci ferate, la nivelarea terenurilor, la executarea
unor lucrri de mbuntiri funciare.
Clasificarea screperelor
Screperele se pot clasifica dup mai multe criterii:
-dup modul de deplasare:
-screpere tractate
-autoscrepere prevzute cu mecanism propriu de deplasare
-dup modul de umplere a cupei:
-screpere cu oblon ( fr echipament de ncrcare a cupei cu pmnt),la care
umplerea cupei se obine prin intrarea forat a brazdei de pmnt n cup
-screpere cu elevator de ncrcare
-dup modul de descrcare a cupei:
-descrcare forat
-descrcare combinat
-descarcare prin basculare
-dup numrul de puni motoare:
-autoscrepere cu o punte motoare (puntea fa);
-autoscrepere cu ambele puni motoare
Principalii parametri ai autoscreperelor sunt:
-masa mainii M, i puterea motorului- P
-capacitatea cupei - Q
-limea de tiere - B
-fora maxim de traciune - F
m
-domeniul vitezelor de deplasare V
m
V
M
-raza minim de viraj - R
min
-dimensiuni de gabarit H, L, l
Scheme constructive i funcionare
n figura 9.1.a se prezint schema unui autoscreper cu oblon cu descrcare forat,n figura 9.1.b
schema unei cupe cu oblon cu descrcare combinat, iar n figura 9.1.c schema unei cupe cu
elevator de ncrcare.
Pentru descrcarea cupei se ridic oblonul i se realizeaz golirea cupei prin deplasarea peretelui
mobil din spatele cupei (descarcare fortata)sau prin bascularea peretelui inferior i a peretelui din
spate (descrcare combinat). n timpul descrcrii screperul se deplaseaz pentru a se depune
pmntul ntr-un strat cu grosime aproximativ constant.
Prin deplasarea screperului cuitul cupei taie o brazd de pmnt care intr n cup, n poziia de
spare oblonul cupei fiind puin ridicat. Dup umplerea cupei cu pmnt se nchide oblonul, se
ridic cupa i maina se deplaseaz spre locul de descrcare, pe o distan de pn la 5 km.
Manevrarea oblonului se poate realiza cu doi cilindri montai pe pereii laterali ai cupei sau prin
intermediul unei prghii i a unei tije cu un cilindru hidraulic montat pe cadrul principal. De
asemenea i pentru manevrarea cupei sunt variante cu cilindri care acioneaz direct asupra cupei
(fig. 9.2, fig.9.3), precum i variante cu cilindri hidraulici i sistem de bare articulate.
Fig.9.1.a. Schema unui autoscreper cu oblon cu descrcare forat a cupei (vedere lateral i de
sus)
1- tractor monoax; 2 suport articulat;3 cadrul principal; 4 cilindri de direcie; 5 cup; 6 oblon; 7
cilindri manevrare cup; 8 cilindri manevrare oblon; 9 perete posterior mobil; 10 cilindri de
descrcare; 11 roi spate; 12 - tampon
Fig.9.1.b.Schema cupei cu oblon cu descrcare combinat
1 cupa; 2 oblon basculant; 3 perete basculant; O
1
articulaia oblonului la cup; O
2
articulatia peretelui
basculant
Fig.9.1.c. Schema cupei cu elevator de ncrcare
1 cupa; 2 elevator de incrcare cu lan i raclei; 3 perete posterior mobil; 4 perete inferior mobil
Virajul se realizeaz cu ajutorul a doi cilindri hidraulici fixai ntre suporul articulat montat pe
tractorul monoax i cadrul screperului (fig.9.3).
Avnd n vedere c la screperele cu oblon apar rezistene foarte mari la sfritul umplerii
cupei, n aceast faz se utilizeaz un tractor ajuttor (buldozer), care acioneaz asupra
tamponului din spate cu o for de mpingere, care se nsumeaz cu fora de traciune a
autoscreperului .Astfel se poate obine i o supraumplere a cupei fr a se mri puterea motorului
i masa mainii. Soluia este economic dac tractorul auxiliar poate deservi mai multe
autoscrepere, cerin care se poate realiza dac distana de transport este suficient de mare ( peste
1 km).
Pentru creterea forei de traciune se utilizeaz autoscrepere cu doua motoare care pot
realiza o umplere mai bun a cupei fr intervenia unui tractor ajuttor.
O reducere mare a rezistenei la spare se obine la screperele cu elevator , unde elevatorul de
ncrcare cu raclei amplasat n faa cupei, n locul oblonului preia brazda de pmnt i o
introduce n cup, realiznd o supraumplere a cupei fr ajutorul tractorului mpingtor
La autoscrepere se utilizeaz frecvent mecanisme de deplasare cu transmisie hidromecanic cu
convertizor hidraulic de cuplu i cutie de viteze cu ambreiaje multidisc, care asigur schimbarea
vitezelor n sarcin.
S-ar putea să vă placă și
- Actionari ElectriceDocument319 paginiActionari ElectriceMarius Scobiola100% (4)
- Proiect de LicentaDocument106 paginiProiect de LicentaTureac Cornel100% (3)
- Curs AhpDocument94 paginiCurs AhpDaiana Nicoleta PÎncă nu există evaluări
- Tabel Propunere Proiecte - 2020-2021 Mecatronica PDFDocument7 paginiTabel Propunere Proiecte - 2020-2021 Mecatronica PDFBoBo BogdanÎncă nu există evaluări
- Structura Generală A Unui Sistem de Acţionare ElectricăDocument3 paginiStructura Generală A Unui Sistem de Acţionare ElectricăAnamaria GedeonÎncă nu există evaluări
- M4 Sisteme de Transmitere A Miscarii Si Mecanisme Clasa XII Liceu Seral PetroiuDocument38 paginiM4 Sisteme de Transmitere A Miscarii Si Mecanisme Clasa XII Liceu Seral PetroiuFlorin100% (1)
- Proiectarea Unei Instalatii HidrauliceDocument13 paginiProiectarea Unei Instalatii HidrauliceEcaterina MihailovÎncă nu există evaluări
- Tehnologia Lucrărilor de Construcţii Şi Maşini de Construcţii Mai 2010Document317 paginiTehnologia Lucrărilor de Construcţii Şi Maşini de Construcţii Mai 2010Stefan IlieÎncă nu există evaluări
- Masini Utilaje EchipamenteDocument94 paginiMasini Utilaje EchipamenteVlad Rotari100% (1)
- Instalatii de Ridicat Si Transport atDocument7 paginiInstalatii de Ridicat Si Transport at99aliÎncă nu există evaluări
- Cilindru Dublu Efect Actionare-PneumaticaDocument27 paginiCilindru Dublu Efect Actionare-PneumaticaEmpos Com100% (1)
- Maşina de Rabotat TransversalDocument1 paginăMaşina de Rabotat TransversalFometescu OctavianÎncă nu există evaluări
- CRR CL XI Liceu TH Proiectant CAD PDFDocument67 paginiCRR CL XI Liceu TH Proiectant CAD PDFFlorea IleanaÎncă nu există evaluări
- Curs Tractoare 12 Din 2008Document32 paginiCurs Tractoare 12 Din 2008Gheorghe Mihai Sorin100% (1)
- Mecanisme de Transform Are A MiscariiDocument16 paginiMecanisme de Transform Are A MiscariiBarbu Constantin100% (2)
- Proiect Organe de Masini UtcnDocument28 paginiProiect Organe de Masini UtcnBogdan Gabriel100% (1)
- Proiect MADocument9 paginiProiect MAAdrian Popa100% (1)
- CuplajeDocument31 paginiCuplajeKarina SteinÎncă nu există evaluări
- 1.clasificarea MecanismelorDocument4 pagini1.clasificarea MecanismelorAlex Gda100% (1)
- Indrumator Laboraor Organe de MasiniDocument396 paginiIndrumator Laboraor Organe de MasiniNicolaie Cristian Andrei100% (2)
- Dispozitive Instalatii Ridicat TransportatDocument18 paginiDispozitive Instalatii Ridicat Transportatautogav20065285Încă nu există evaluări
- Mecanizarea Recoltarii Cerealelor PaioaseDocument13 paginiMecanizarea Recoltarii Cerealelor PaioasenaiditzaÎncă nu există evaluări
- Memoriu TehnicDocument18 paginiMemoriu TehnicMădălin MeaucăÎncă nu există evaluări
- Sisteme ManipulatoareDocument6 paginiSisteme ManipulatoareCatalin MihalceaÎncă nu există evaluări
- Lanturi CinematiceDocument7 paginiLanturi CinematiceAnatolie RomanciucÎncă nu există evaluări
- Buldozer ReferatDocument8 paginiBuldozer ReferatUngur VladÎncă nu există evaluări
- Intretinerea Si Repararea M.R.scripeti Si PalaneDocument29 paginiIntretinerea Si Repararea M.R.scripeti Si Palanetanase_v100% (4)
- Instalatii de Ridicat Si de TransportatbDocument15 paginiInstalatii de Ridicat Si de TransportatbConstantinCornelÎncă nu există evaluări
- Excavatoare Cu o CupaDocument70 paginiExcavatoare Cu o CupaSebastian Mustata50% (2)
- 9.dinamica Interactiunii Roata - Cale de RulareDocument7 pagini9.dinamica Interactiunii Roata - Cale de RulareNechita ConstantinÎncă nu există evaluări
- Motoare PneumaticeDocument25 paginiMotoare PneumaticeDragutu GeoÎncă nu există evaluări
- Sisteme de Actionare ElectricaDocument18 paginiSisteme de Actionare ElectricaGeorgicaÎncă nu există evaluări
- Cuplarea Masinilor Agricole La Tractor.Document13 paginiCuplarea Masinilor Agricole La Tractor.victor nistor100% (1)
- AutoCad 2002 Generarea Suprafetelor in 3DDocument21 paginiAutoCad 2002 Generarea Suprafetelor in 3Dtanase_v100% (1)
- Analiza Şi Simularea Mecanismelor - 1 PDFDocument38 paginiAnaliza Şi Simularea Mecanismelor - 1 PDFSufariu Mirela100% (2)
- Anliza Cinetostatica Dinamica Curs 6 7 PDFDocument20 paginiAnliza Cinetostatica Dinamica Curs 6 7 PDFMihai CojocaruÎncă nu există evaluări
- Pompe Cu Roti DintateDocument4 paginiPompe Cu Roti DintateBasalic GeorgeÎncă nu există evaluări
- Masini ConstructiiDocument47 paginiMasini ConstructiiRaul MiclăușÎncă nu există evaluări
- Curs 1-10 - TraDocument79 paginiCurs 1-10 - TraMarius LupyÎncă nu există evaluări
- DebiteDocument26 paginiDebiteAlin UntaruÎncă nu există evaluări
- Actionari Hidraulice CarteDocument74 paginiActionari Hidraulice CarteBratan IuliaÎncă nu există evaluări
- Automobile Eccp ProiecteDocument684 paginiAutomobile Eccp Proiectetanase_v100% (1)
- Proiect-Uzura PieselorDocument22 paginiProiect-Uzura PieselorsovieticuÎncă nu există evaluări
- Masini de RidicatDocument13 paginiMasini de RidicatLeny LenyÎncă nu există evaluări
- Tehnologia LacatuserieiDocument127 paginiTehnologia LacatuserieiVali ErmalaiÎncă nu există evaluări
- Cuplaje IntermitenteDocument24 paginiCuplaje IntermitenteTotoliciu Dan Catalin100% (1)
- Componentele Procesului de AschiereDocument28 paginiComponentele Procesului de AschierematacheÎncă nu există evaluări
- Modul - Masini de ConstructiiDocument1 paginăModul - Masini de ConstructiiMihai RusuÎncă nu există evaluări
- Utilaje Tehnologice 10Document6 paginiUtilaje Tehnologice 10Nichi NichiÎncă nu există evaluări
- Transmisii Mecanice PDFDocument350 paginiTransmisii Mecanice PDFflorin100% (1)
- Masini ConstructiiDocument19 paginiMasini ConstructiiElena ManuelaÎncă nu există evaluări
- Curs 1 - Transmisii MecaniceDocument5 paginiCurs 1 - Transmisii MecaniceAlexis EnacheÎncă nu există evaluări
- MecanicaDocument50 paginiMecanicaDimofte GeorgianaÎncă nu există evaluări
- Sisteme MecaniceDocument2 paginiSisteme MecaniceCristi DrugaÎncă nu există evaluări
- 1.1.structura Şi Clasificarea Mecanismelor 1.1.1.noţiuni Introductive Şi DefiniţiiDocument77 pagini1.1.structura Şi Clasificarea Mecanismelor 1.1.1.noţiuni Introductive Şi DefiniţiiVera MoscuÎncă nu există evaluări
- Curs 1Document15 paginiCurs 1Oana MunteanÎncă nu există evaluări
- Ahp Teorie BunDocument235 paginiAhp Teorie BunIngriddÎncă nu există evaluări
- ProiectDocument26 paginiProiectTeodora VasileÎncă nu există evaluări
- 1 Sisteme de Actionare Electrica 1Document23 pagini1 Sisteme de Actionare Electrica 1Eugeniu MalachiÎncă nu există evaluări
- Prezentare Cap 1Document9 paginiPrezentare Cap 1Daniel ŢepeșÎncă nu există evaluări