0% au considerat acest document util (0 voturi)
57 vizualizări11 paginiAlbuFlorinP1 1
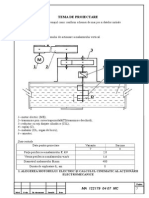
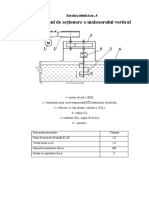
Documentul prezintă proiectarea unei transmisii mecanice compuse dintr-un motor electric asincron și un reductor cilindric cu o treaptă. Sunt date datele de proiectare, conținutul proiectului și sarcinile de lucru. Proiectul include calculul parametrilor transmisiei, alegerea materialelor și verificarea rezistenței.
Încărcat de
Eduard CraiuDrepturi de autor
© © All Rights Reserved
Respectăm cu strictețe drepturile privind conținutul. Dacă suspectați că acesta este conținutul dumneavoastră, reclamați-l aici.
Formate disponibile
Descărcați ca DOCX, PDF, TXT sau citiți online pe Scribd
0% au considerat acest document util (0 voturi)
57 vizualizări11 paginiAlbuFlorinP1 1
Documentul prezintă proiectarea unei transmisii mecanice compuse dintr-un motor electric asincron și un reductor cilindric cu o treaptă. Sunt date datele de proiectare, conținutul proiectului și sarcinile de lucru. Proiectul include calculul parametrilor transmisiei, alegerea materialelor și verificarea rezistenței.
Încărcat de
Eduard CraiuDrepturi de autor
© © All Rights Reserved
Respectăm cu strictețe drepturile privind conținutul. Dacă suspectați că acesta este conținutul dumneavoastră, reclamați-l aici.
Formate disponibile
Descărcați ca DOCX, PDF, TXT sau citiți online pe Scribd