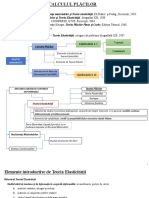
Placi place circulare rezemate simetric cu
incarcare simetrica, rezemate pe mediu elastic
Ecuaiile difereniale de echilibru, aspectul geometric, aspectul
fizic
Masterand: Breahnea Simona Ana
�1.1 Aspecte generale
Placile sunt elemente care au doua dimensiuni (lugimea si latimea) relativ mari
in comparatie cu cea de-a treia (grosimea). Aceste placi indeplinesc conditia
unde l, de regula orientat dupa x, este latura mica a placii dreptunghiulare (cealalta
latura) iar in cazul placii circulare,in cazul nostru, se face referire la raza R a acestora.
Pe ce se bazeaza studiul placilor plane circulare?
Studiul placilor se face pe baza teoriei elasticitatii.
1.2 Alcatuirea generala a placilor
Elementele geometrice ale unei placi sunt :
Forma dimensiunile suprafetei mediane
Dimensiunile suprafetei mediane
Grosimea
Ce reprezinta Suprafata mediana a aplacii?
Suprafata medianaeste locul geometric al punctelor egal departate de
suprafetele exterioare ale placii .Aceste pot fi caracterizate functie de forma lor astfel:
Placi plane
Placi curbe
Invelitori
Ce reprezinta grosimea unei placi?
Grosimea placiireprezinta distanta dintre doua puncte ale suprafetelor
exterioare, masurata perpendicular pe suprafata mediana . In functie de grosimea ha
placii si de dimensiunea l cea mai mica a conturului placile pot fi :
Membrane , placi cu grosime foarte mica , h
l/80. Aceste placi au o
rigiditate neglijabila la incovoiere si preiau numai eforturi axiale.
Placi groase, placi cu grosime relativ mare , h l/5 . Calculul acestor placi
se face cu teoria spatiala a elasticitatii.
2
�Dupa forma suprafetei mediane placile plane pot fi :
Circulare
Dreptunghiulare
Eliptice
De alte forme
1.3Particularitati ale placilor
Placile fata de bare , prezinta anumite particularitati cu privire la sarcini si
eforturi. Astfel, sarcinile aplicate placilor pot fi :
concentrate [N]
distribuite liniar [N/mm]
2
distribuite pe o suprafata [N/ mm ]
Deoarece sectiunea unei placi este mare, eforturile N, T,
Mi
Mt
, variaza
in lungul sectiunii. Din acest motiv, eforturile se calculeaza pe unitatea de lungime a
sectiunii si au urmatoarele unitati de masura :
efortul axial [N/mm]
efortul taietor [N/mm]
momentul incovoietor [Nmm/mm]
momentul de rasucire [Nmm/mm]
Ipotezele de calcul din studiul barelor se admit in continuare iar unele se extind
la calculul placilor. Se considera ca materialul placii este omogen, izotrop si legea
generalizata a lui Hooke in domeniul elastic este satisfacuta. Se adopta o grosime a
placii constanta. Placile plane sunt simetrice din punct de vedere al formei, pot fi
rezemate si incarcate simetric sau pot fi incarcate nesimetric .
Pentru placile plane, sistemul de referinta xyz are axele x si y in planul
suprafetei mediane, iar axa z perpendiculara pe acest plan.
�In cazul general, problema placilor plane este o problema de stare spatiala de
tensiune cu urmatorii tensori :
Placi plane dreptunghiulare (coordonate carteziene)
x yx zx
xy y zy
xz yz z
Placi plane circulare ( coordonate polare )
r r zr
r z
rz z z
1.4Ipoteze simplificatoare pentru calculul placilor plane subtiri
1. Se neglijeaza extensiunile planului median ( placile subtiri sunt considerate
rigide => deformatiile specifice liniare si unghiulare sunt nule => deplasarile
punctelor din planul median pe directiile axelor din plan sunt nule . Pentru placa
circulara : u(r,)=0 ; v(r,)=0
2. Se neglijeaza presiunile dintre planurile paralele cu planul median =>
z=0
3. Se accepta ipoteza normalelor drepte ipoteza lui Kirchhoff Love o
dreapta normala la planul median inainte de deformatie ramane dreapta si
�normala la planul median dupa deformare =>
rz = z =0
w
z=0 z= =0 w=w ( x , y )
t
Ipoteza lui Bernoulli devine ipoteza lui Kirchoff. Prin aceasta se admite ca
punctele aflate pe normala la suprafata mediana raman pe normala la suprafata
deformata. Se neglijeaza astfel lunecarile din material comparativ cu rotirea
normalei. Inseamna ca punctele materiale ale placii se deplaseaza dupa
normalele in planul median, in felul acesta fiind suficient studiul deformarii
planului median. Deformatiile fiind mici comparativ cu dimensiuinile placii, se
pot scrie intr-o prima etapa ecuatiile de echilibru pentru forma nedeformata. Se
observa ca eforturile, si in consecinta tensiunile, nu mai pot fi determinate prin
metoda sectiunilor. Se constata ca deformatiile, tensiunile si eforturile pot fi
exprimate printr-o functie a rotirii j sau a deplasarii w. Problema consta in a
stabili expresia uneia din aceste functii in baza studiului geometric, fizic si
mecanic al placii.
Placi plane dreptunghiulare subtiri :
x yx zx
xy y zy
xz yz 0
Placi plane circulare subtiri :
Pentru puncte din planul median
z=0
rz = z=0
=
z=0 w=w (r ,)
u(r,)=0 , v(r,)=0
r r zr
r z
rz z 0
�Placi plane circulare incarcate si rezemate axial simetric
Se considera cazul simplu al unei placi
circulare simplu rezemata pe contur, articulata sau incastrata, definita intr-un sistem de
referinta cilindric, incarcata simetric cu o sarcina uniform distribuita. Datorita
simetriei, pe un cerc de raza oarecare, eforturile sunt aceleasi, dezvoltarea tensiunii
avand o variatie identica indiferent de orientarea razei
Din motive de simetrie axiala :
z =0 z = z =0
� r =0 r= r =0
w=w ( r )
De asemenea, pe un cerc de raza rtoate marimile depind numai de raza nu de
z= z ( r )
Efor
uri
sectionale
z = ( r )
t
(dA=dz1)
h
2
M r = r z dz
h
2
h
2
M = z dz
h
2
h
2
T = dz
h
2
Forta taietoare
Momente incovoietoare
�M r=M r ( r )
M =M ( r )
T =T ( r )
1.5 Aspectul static :
Ecuatiile de echilibru vor fi o ecuatie de proiectie pentru axa z si o ecuatie de moment
fata de axa . Eforturile sectionale se inmultesc cu lungimile pe care se dezvolta
(r=d), incarcarea se inmulteste cu aria pe care actioneaza ( r dr d)
z=0 T r d p r dr dT r d dr ( T r d ) dr=0
p r dr d
dT
r dr dT dr d=0 /: dr d
dr
8
dT T
1 d
+ + p=0 sau
( T r )=p ( r )
dr r
r dr
M =0 M r r dM r r d dr ( M r r d ) dr +2 M dr sin
sin
d
dr
dr d
dr
++T r d + T r d + ( T r d ) dr =0
2
2
2 dr
2
d Mr
d d
r ddrM r ddr + M ddr +T r dr =0:r dr d
2 2
dr
d M r M r M
M
1 d
+
=T sau
M r r ) =T
(
dr
r
r dr
r
Se observa ca pentru r se regasesc relatiile din R.M :
d Mr
dt
=p ;
=T
dr
dr
Pentru placi plane circulare subtiri, incastrate si rezemate simetric :
dt T
+ = p(1)
dr r
d M r M rM
+
=T (2)
dr
r
1.6 Aspectul geometric:
dw
dw
u=
z
dr
dr
(la o rotire pozitiva , deplasarea u este negativa )
Relatiile intre deformatiile specifice
r si
si deplasarile u si v sunt aceleasi ca la
Starea plana de tensiune in coordonate polare.
- problema plana axial simetrica :
d
d2 w
r =z
=z 2
dr
dr
z dw
=z =
r
r dr
r r=0
1.7 Aspectul fizic:
-aceleasi relatii ca la starea plana de tensiune (
10
z=0
E
E
d
1
r=
+ )=
(z
z )
r = ( r )
2( r
2
dr
r
1
1
E
1
E
E
d
= ( r )
=
+ r )=
(z z )
2(
2
E
r
dr
1
1
E
1 2
E
=
12
r=
( ddr + r ) z
( r + ddr ) z
h
2
Expresiile momentelor incovoietoare M r si M
E d
M r= r z dz =
+
2
r
1 dr
h
h
2
E h3 d
z dz= ( 2 ) ( dr + r )
12 1
h
2
2
h
2
M = z dz=
h
2
Se noteaza :
D=
E h3
d
+
2
dr
12 ( 1 ) r
E h3
12 ( 12 )
rigiditate cilindrica la incovoiere
1h
EI
I= 12 D= 1 2
( ddr + r )
d
M =D ( + )
r
dr
M r =D
=>
Se introduc expresiile
D
M r si M
) (
in relatia (2) si rezulta :
d d
D d
d
+
2
+
=T
2
r dr
r r
dr
d r r dr
r
11
�d 2 1 d T
d 1 d ( ) T ( )
+
2=
(a)sau
r =
b (3)
2
D
dr r dr
D
d r r dr r
Daca din ecuatia (1)
dT T
+ =p
dr r
d3 2 d2 1 d p ( )
+
+ = 4a
d r 3 r d r 2 r 2 dr r 3 D
Sau
{ [
]}
1 d
d 1 d
p
r
( r ) = (4 b)
r dr dr r dr
D
Relatia (4b) se obtine direct din (3b) daca se tine seama de ecuatia (1) sub forma
1 d
( R r )=p
r dr
Observatie !
1) Relatia (4) este ecuatia fundamentala a placilor plane circulare exprimata in
rotiri
2) Ecuatia fundamentala exprimata in deplasari se obtine din :
=
dw
d 4 w 2 d3 w 1 d 2 w 1 dw p
(4 a) 4 +
+
= (5 a)
dr d r r d r 3 r 2 d r 2 r 3 dr D
d2 1 d
= 2+
operatorul Laplace de ordinul II in coordonate polare,
d r r dr
2
pentru problema plana axial simetrica .
2 2 w=
p (r )
(5 b)
D
3) Ecuatia (3b) este utila la rezolvarea placilor static determinate (care au un
singur inel de rezemare)
12
�Se integreaza succesiv ecuatia (3b)
d
r
(r )= T dr +c 1 r
dr
D
Tdr
dr +
r
1
=
rD
Expresia fortei taietoare se determina dintr-o ecuatie de proiectie pentru axa z,
iar constantele de integrare
c 1 si c2
se determina din conditiile de margine
exprimate in rotiri si/sau moment incovoietor
Mr
z=0 p d d+T r d=0 T = 1
p d
r 0
0
Fie
p ( )=q=ct T =
1 2 r qr
q =
r
2 0
2
La aceeasi valoare se ajunge si daca se exprima echilibrul intre rezultanta
2
incarcarii q pe suprafata r si rezultanta fortei taietoare T pe 2 r .
13
�q r
2 r T =0 T =
qr
2
Pentru placa circulara plina, datorita simetriei
r=0 =0 c2=0
axiale, la
Inlocuind T in relatia 3(a)
d 2 1 d 1
1 qr
+
2 =
2
D 2
d r r dr r
( )
1
d
+r
r
dr
(7)
reprezinta derivata membrului intai din expresie
Ecuatia diferentiala (7) devine :
[(
)] ( )
d 1
d
1 qr
+r
=
dr r
dr
D 2
(8)
Dupa integrare devine :
1
d
1 r 2q
+r
=
+c 1 ( 9 ) r
r
dr
D 4
+r
( )
d 1 r 3 q
=
+c 1 r
dr D 4
( )
Se integreaza din nou :
2
r ln r dr= r2 ln r r2 drr = r2 ln r r4
14
r=
( )
1 r p
r
+c 1 + c 2
D 16
2
p r 3
r c
+ c1 + 2
16 D
2 r
| :r
(10)
2 Expresia deplasarii se obtine din integrarea relatiei (10)
w=
p r4
r2
c 1 + c 2 ln r +c 3
64 D
4
15