S-ar putea să vă placă și
- Calcule Moară Cu ValțuriDocument26 paginiCalcule Moară Cu ValțuriurkkkkÎncă nu există evaluări
- 04-Transmisii Prin Curele Trapezoidale PDFDocument11 pagini04-Transmisii Prin Curele Trapezoidale PDFGogoi DanielaÎncă nu există evaluări
- Trasare Pe Teren Elemente TopoDocument5 paginiTrasare Pe Teren Elemente Topomihai_daneaÎncă nu există evaluări
- Angrenaj Conic Cu Dinti Drepti - Desen de ExecutieDocument9 paginiAngrenaj Conic Cu Dinti Drepti - Desen de ExecutieMihaiBuleu100% (4)
- Modelarea Geometrico-Cinematică A Angrenajelor Plane Evolventice de Tip Roată-Cremalieră (R-C)Document17 paginiModelarea Geometrico-Cinematică A Angrenajelor Plane Evolventice de Tip Roată-Cremalieră (R-C)Andreea TicușanÎncă nu există evaluări
- Modelarea Geometrico-Cinematică A Unui Angrenaj Plan Evolventic de Tip Roată-Roată (R-R)Document9 paginiModelarea Geometrico-Cinematică A Unui Angrenaj Plan Evolventic de Tip Roată-Roată (R-R)nicu oprisanÎncă nu există evaluări
- Roata CremalieraDocument18 paginiRoata CremalieraJulcsy RabÎncă nu există evaluări
- L10 Lanturi Cinematice Interdependente. FiletareaDocument9 paginiL10 Lanturi Cinematice Interdependente. FiletareaVlad PaulÎncă nu există evaluări
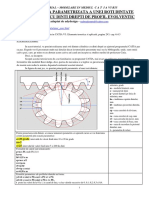
- Modelarea Parametrizata A Unei Roti Dintate in Catia PDFDocument48 paginiModelarea Parametrizata A Unei Roti Dintate in Catia PDFMatara1984Încă nu există evaluări
- Curs Geometrie ComputationalaDocument40 paginiCurs Geometrie Computationaladreamb0xÎncă nu există evaluări
- Geometrie ComputationalaDocument44 paginiGeometrie ComputationalaAdrian CosacÎncă nu există evaluări
- Geom CompDocument42 paginiGeom CompBianca M. BurlanÎncă nu există evaluări
- Stabilirea Formei Şi Dimensiunilor Semifabricatului Pentru AmbutisareDocument13 paginiStabilirea Formei Şi Dimensiunilor Semifabricatului Pentru AmbutisareValentina ȘerbanÎncă nu există evaluări
- Bi RoticaDocument9 paginiBi RoticaADELUTA PETRISORÎncă nu există evaluări
- Tema Casa MecanismeDocument2 paginiTema Casa MecanismeBogdan StoicaÎncă nu există evaluări
- Modelare GeometricaDocument69 paginiModelare GeometricaCalin PopescuÎncă nu există evaluări
- S11 - S12 Aplicatii Propuse RegresieDocument4 paginiS11 - S12 Aplicatii Propuse RegresieSebi AmariiÎncă nu există evaluări
- Roti Dintate TeorieDocument24 paginiRoti Dintate Teoriecrdi88% (8)
- Suport L7. Analiza Mecanism Cu Camă de Rotație Si Tachet de Translație Cu Rolă Modul 4Document10 paginiSuport L7. Analiza Mecanism Cu Camă de Rotație Si Tachet de Translație Cu Rolă Modul 4PoenariuVictor-CiprianÎncă nu există evaluări
- 2 Curbe BezierDocument76 pagini2 Curbe BezierWarlord UrsaÎncă nu există evaluări
- Proiect Roti Dintate 28.05.2019Document19 paginiProiect Roti Dintate 28.05.2019Electro PÎncă nu există evaluări
- Geometrie ComputationalaDocument38 paginiGeometrie ComputationalaSăgeataSubterfugiuÎncă nu există evaluări
- Calculul Cutiei de VitezeDocument25 paginiCalculul Cutiei de VitezeCostinel BogheanuÎncă nu există evaluări
- Roti DintateDocument26 paginiRoti DintateNita Rares CosminÎncă nu există evaluări
- Proiect PASADocument18 paginiProiect PASAAdelin DenisÎncă nu există evaluări
- Curs 13 TG PDFDocument19 paginiCurs 13 TG PDFPulsefire GabyÎncă nu există evaluări
- Laborator 8 TCDDocument3 paginiLaborator 8 TCDsebiÎncă nu există evaluări
- Laborator 3 - MOM IDocument6 paginiLaborator 3 - MOM IbigcrissmallÎncă nu există evaluări
- Utilaje de FabricatieDocument106 paginiUtilaje de FabricatieFlorin Cristea100% (1)
- ACAD Roti DintateDocument9 paginiACAD Roti DintateKrocodileÎncă nu există evaluări
- Curs 10Document14 paginiCurs 10Patrascu Ionut AndreiÎncă nu există evaluări
- Determinarea Caracteristicilor Constructive Ale Angrenajului Conic Cu Dinti Drepti Uzat, Al Unui Reductor de TuratieDocument7 paginiDeterminarea Caracteristicilor Constructive Ale Angrenajului Conic Cu Dinti Drepti Uzat, Al Unui Reductor de TuratieCostyZanfirescuÎncă nu există evaluări
- MS 2012 - 2Document33 paginiMS 2012 - 2MysteriouSÎncă nu există evaluări
- Organe de Mașini I PP 6Document66 paginiOrgane de Mașini I PP 6iordache andreiÎncă nu există evaluări
- Calculul Puntii Motoare SpateDocument18 paginiCalculul Puntii Motoare SpateImbir SilviuÎncă nu există evaluări
- Modelarea RD Cu Dinti Inclinati CATIADocument31 paginiModelarea RD Cu Dinti Inclinati CATIAAlex RisteaÎncă nu există evaluări
- GGDocument15 paginiGGBogdan ScutaruÎncă nu există evaluări
- Capitolul 1 Unit RestDocument20 paginiCapitolul 1 Unit RestVadim PiÎncă nu există evaluări
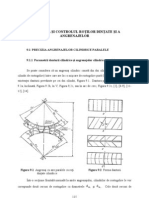
- Determinarea Caracteristicilor Constructive Ale Unui Angrenaj Cilindric Cu Dinti Inclinati Uzat.Document6 paginiDeterminarea Caracteristicilor Constructive Ale Unui Angrenaj Cilindric Cu Dinti Inclinati Uzat.CostyZanfirescuÎncă nu există evaluări
- 1 Cazul 1 (Cârlig de Remorcare Drept Cu Sferă)Document8 pagini1 Cazul 1 (Cârlig de Remorcare Drept Cu Sferă)Mihai BalicaÎncă nu există evaluări
- Teorie Brosa (A4)Document13 paginiTeorie Brosa (A4)Nicolae LacziÎncă nu există evaluări
- Proiect DispozitiveDocument14 paginiProiect DispozitiveFlorentinaÎncă nu există evaluări
- 10 Aplicatia 09 3D Arbore de IntrareDocument9 pagini10 Aplicatia 09 3D Arbore de IntrareAlexandru BocoșÎncă nu există evaluări
- Proiect Robotica Cama Matei PanaDocument10 paginiProiect Robotica Cama Matei PanaDumitru SebastianÎncă nu există evaluări
- Analiza Structurală A Mecanismelor Plane Monocontur: 1.1. CuprinsDocument7 paginiAnaliza Structurală A Mecanismelor Plane Monocontur: 1.1. Cuprinsnicu oprisanÎncă nu există evaluări
- Regression StatisticsDocument2 paginiRegression StatisticsClaudia Ana-Maria COMANÎncă nu există evaluări
- Curs 2 OMDocument14 paginiCurs 2 OMblackembadÎncă nu există evaluări
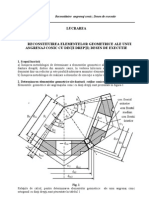
- Restabilirea Elementelor Geometrice Ale Angrenajului Cilindric Aprecierea FortelorDocument9 paginiRestabilirea Elementelor Geometrice Ale Angrenajului Cilindric Aprecierea FortelorMihaiBuleuÎncă nu există evaluări
- Tehnologii de Prelucrare - Partea 3 PDFDocument80 paginiTehnologii de Prelucrare - Partea 3 PDFalexandru_cimpean88Încă nu există evaluări
- Calculul Si Constructia Unui Reductor Cu Ajutorul Curelelor TrapezoidaleDocument20 paginiCalculul Si Constructia Unui Reductor Cu Ajutorul Curelelor TrapezoidaleCatalin LazarÎncă nu există evaluări
- Seminarii EconometrieDocument35 paginiSeminarii EconometrieAnghelache Eduard CristianÎncă nu există evaluări
- L1 Determinarea Razelor Rotilor AutomobiluluiDocument4 paginiL1 Determinarea Razelor Rotilor AutomobiluluiCaraiman GeorgeÎncă nu există evaluări
- Analiza Structurală A Mecanismelor Bicontur: 2.1. CuprinsDocument10 paginiAnaliza Structurală A Mecanismelor Bicontur: 2.1. Cuprinsnicu oprisanÎncă nu există evaluări
- Analiza Structurală A Mecanismelor Plane Monocontur: 1.1. CuprinsDocument7 paginiAnaliza Structurală A Mecanismelor Plane Monocontur: 1.1. Cuprinsnicu oprisanÎncă nu există evaluări
- Modul 2 Bazele Economiei PlatformaDocument70 paginiModul 2 Bazele Economiei Platformanicu oprisanÎncă nu există evaluări
- Modul 1 Bazele Economiei PlatformaDocument59 paginiModul 1 Bazele Economiei Platformanicu oprisanÎncă nu există evaluări
- Ana Monica PURCARUDocument168 paginiAna Monica PURCARUnicu oprisanÎncă nu există evaluări