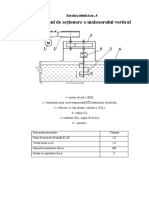
S-ar putea să vă placă și
- Pornirea Motoarelor Asincrone Trifazate Cu Rotor in ScurtcircuitDocument8 paginiPornirea Motoarelor Asincrone Trifazate Cu Rotor in ScurtcircuitLaura Risnita100% (1)
- Zreglarea TuraţieiDocument14 paginiZreglarea TuraţieiIonutÎncă nu există evaluări
- Pornirea Motoarelor AsincroneDocument6 paginiPornirea Motoarelor AsincroneStefan RaduÎncă nu există evaluări
- Caracteristicile Motoarelor de Curent ContinuuDocument18 paginiCaracteristicile Motoarelor de Curent ContinuuPopa Ionut-CristianÎncă nu există evaluări
- Convertizoare de FrecventaDocument3 paginiConvertizoare de Frecventasilvarone100% (1)
- Convertizorul de CupluDocument14 paginiConvertizorul de CupluTiberiu NigaÎncă nu există evaluări
- Proiect Actionari ElectriceDocument13 paginiProiect Actionari ElectriceAxel XÎncă nu există evaluări
- Regimurile de Functionare Ale Masinii AsincroneDocument8 paginiRegimurile de Functionare Ale Masinii Asincronemihaela plesea100% (1)
- Aparate de Comanda Manuala A Masinilor ElectriceDocument28 paginiAparate de Comanda Manuala A Masinilor ElectriceDanilaEvelina100% (3)
- Programare Unui Motor ServoDocument19 paginiProgramare Unui Motor ServoRaducanu Gabriel100% (1)
- Franarea Motorului de Curent ContinuuDocument15 paginiFranarea Motorului de Curent Continuunaiditza100% (1)
- Reglarea Turatiei Motoarelor AsincroneDocument135 paginiReglarea Turatiei Motoarelor AsincroneCatanescu Alexandru-Laurentiu0% (1)
- Probleme Rezolvate 4Document4 paginiProbleme Rezolvate 4nykuÎncă nu există evaluări
- Pornirea Motoarelor Asincrone Trifazate Cu Rotor in ScurtcircuitDocument9 paginiPornirea Motoarelor Asincrone Trifazate Cu Rotor in ScurtcircuitDaniel PirvulescuÎncă nu există evaluări
- Actionari Electrice Cu Logica CablataDocument10 paginiActionari Electrice Cu Logica CablataTudor Ana-MariaÎncă nu există evaluări
- Sisteme de Acţionare Pentru Reglarea Automată A Poziţiei Utilizând Motoare AsincroneDocument14 paginiSisteme de Acţionare Pentru Reglarea Automată A Poziţiei Utilizând Motoare AsincroneCraciun AlexÎncă nu există evaluări
- 5 MotoareDocument32 pagini5 Motoareadrianl136378100% (1)
- Motor Pas Cu PasDocument14 paginiMotor Pas Cu PasIonut IlieÎncă nu există evaluări
- Tema la IAR. Cutie de viteza сu 2 si 3 arboriDocument13 paginiTema la IAR. Cutie de viteza сu 2 si 3 arboriTimciuc Iacob100% (1)
- Lucrarea NR 11Document13 paginiLucrarea NR 11Oliver KlaussÎncă nu există evaluări
- Franarea RecuperativaDocument3 paginiFranarea Recuperativaraducutanase86Încă nu există evaluări
- Diagnostic Area Generala - MotorDocument30 paginiDiagnostic Area Generala - MotorMitu AndreiÎncă nu există evaluări
- Aplicaţiile Motorului Asincron Ca GeneratorDocument15 paginiAplicaţiile Motorului Asincron Ca Generatorlionesssssssss100% (1)
- PROIECTDocument32 paginiPROIECTAlina FilipÎncă nu există evaluări
- Ia Examen 2Document25 paginiIa Examen 2Mihai-Ovidiu PopaÎncă nu există evaluări
- 4lab MEA OvcearencoDocument7 pagini4lab MEA OvcearencoBogdanÎncă nu există evaluări
- LABORATOR 3 Masini ElectriceDocument9 paginiLABORATOR 3 Masini ElectriceHelen FlorescuÎncă nu există evaluări
- Laborator Nr.4Document9 paginiLaborator Nr.4StanislavSlobodeaniucÎncă nu există evaluări
- Fiș. Teh. AE LP 4Document3 paginiFiș. Teh. AE LP 4ghenaÎncă nu există evaluări
- Teoria Sistemelor de Reglare Automata PDFDocument92 paginiTeoria Sistemelor de Reglare Automata PDFSandu Cristian100% (1)
- L4 - Traductoare de TuratieDocument8 paginiL4 - Traductoare de Turatiestillgrey217Încă nu există evaluări
- Reglarea Turatiei Motorului de Curent Alternativ XI P TeorieDocument2 paginiReglarea Turatiei Motorului de Curent Alternativ XI P TeorieGabriel RadulescuÎncă nu există evaluări
- Principul de Functionare Al Motorului Asincron TrifazatDocument3 paginiPrincipul de Functionare Al Motorului Asincron TrifazatdncdanielaÎncă nu există evaluări
- Examen ASMK (Fara Partial)Document18 paginiExamen ASMK (Fara Partial)stanciu catalinÎncă nu există evaluări
- Proiect Ira - Conducerea Si Reglarea Unui Motor de Curent ContinuuDocument18 paginiProiect Ira - Conducerea Si Reglarea Unui Motor de Curent Continuunumer_nine99Încă nu există evaluări
- Ministerul Educației Și Cercetării Al Republicii Moldov4Document6 paginiMinisterul Educației Și Cercetării Al Republicii Moldov4Daniel Cheptănari lordsÎncă nu există evaluări
- Motor Pas Cu PasDocument4 paginiMotor Pas Cu PasAlexandru UmaneţÎncă nu există evaluări
- Comandarea Unui Motor de Curent Continu Cu PLCDocument10 paginiComandarea Unui Motor de Curent Continu Cu PLCvioreldutzucÎncă nu există evaluări
- l05 - Sistem de Actionare Electrica Cu Masina Asincrona În Regim de Frânare DinamicaDocument6 paginil05 - Sistem de Actionare Electrica Cu Masina Asincrona În Regim de Frânare DinamicapavelpopescuÎncă nu există evaluări
- Proiect MecanicaDocument36 paginiProiect MecanicaAna MariaÎncă nu există evaluări
- III. Modelarea Motoarelor Pas Cu PasDocument28 paginiIII. Modelarea Motoarelor Pas Cu PasAlin RadaÎncă nu există evaluări
- Dumea Iosif - Sisteme Moderne de Comanda A Masinilor de Curent Alternativ Cu CSFDocument5 paginiDumea Iosif - Sisteme Moderne de Comanda A Masinilor de Curent Alternativ Cu CSFRoxana GalatanuÎncă nu există evaluări
- Pornirea Motoarelor ElectriceDocument11 paginiPornirea Motoarelor ElectricecudalbgeoÎncă nu există evaluări
- Actionarea Motoarelor Pas Cu PasDocument4 paginiActionarea Motoarelor Pas Cu PasDiana TudoracheÎncă nu există evaluări
- Softstartere Si VariatoareDocument19 paginiSoftstartere Si VariatoareReut Rafael100% (1)
- Ui 12Document11 paginiUi 12Adrian MunteanuÎncă nu există evaluări
- Cap 6 FENOMENELE DE BAZĂ LA REGLAREA VITEZEIDocument9 paginiCap 6 FENOMENELE DE BAZĂ LA REGLAREA VITEZEIliviuturcuÎncă nu există evaluări
- Referat 6Document6 paginiReferat 6Ivan Liviu IonÎncă nu există evaluări
- Studiul Unui Motor ElectricDocument8 paginiStudiul Unui Motor ElectricCRISTINA ALBRECHTÎncă nu există evaluări
- 1 Vascozimetrul RotationalDocument6 pagini1 Vascozimetrul RotationalAndrei SolomonÎncă nu există evaluări
- MPP Constructie FunctionareDocument21 paginiMPP Constructie FunctionareGigi TyireanÎncă nu există evaluări