Documente Academic
Documente Profesional
Documente Cultură
Final II Umc 2pdf
Încărcat de
Turliu CristianDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Final II Umc 2pdf
Încărcat de
Turliu CristianDrepturi de autor:
Formate disponibile
GHEORGHIU SILVIU
ACIONRI ELECTRICE
NAVALE
CONSTANA, 2011
PARTEA a II-a
GHEORGHIU SILVIU
ACIONRI ELECTRICE
NAVALE
2011
Partea a II-a
CUPRINS
ELEMENTE GENERALE ALE SISTEMELOR DE ACIONARE ELECTRIC ..................... 11
1.1 Structura sistemelor de acionare electric. Clasificri. Performane ............................................. 11
1.1.1 Structura sistemelor de acionare electric .............................................................11
1.1.2 Clasificarea S.A.E. ...............................................................................................13
1.1.3 Performanele S.A.E. n regim staionar ................................................................13
1.1.4 Performanele S.A.E. n regim dinamic .................................................................15
1.2 Cinematica i dinamica S.A.E. Ecuaia fundamental a micrii. Raportarea micrii de translaie
i rotaie la arborele motorului electric de acionare ............................................................................. 15
1.2.1 Cinematica i dinamica S.A.E. ..............................................................................15
1.2.2 Ecuaia fundamental a micrii ............................................................................16
1.2.3 Raportarea micrii de translaie i de rotaie la arborele motorului electric de
acionare .......................................................................................................................18
1.2.4 Cinematica sistemelor de acionri electrice ..........................................................23
1.3 Clasificarea mainilor de lucru i a motoarelor electrice n funcie de caracteristicile lor
mecanice ................................................................................................................................................ 30
1.3.1 Noiuni generale ...................................................................................................30
1.3.2 Caracteristicile mecanice ale mainilor electrice....................................................30
1.3.3 Caracteristicile mecanice ale mecanismelor de lucru .............................................32
1.3.4 Regimurile de funcionare ale mecanismelor de lucru ...........................................35
1.4 Transmiterea micrii ntre maina de acionare i mecanismul de lucru ..................................... 37
1.4.1 Alegerea transmisiei i a raportului de transmisie ..................................................37
1.4.2 Influena elasticitii i jocurilor din transmisii ......................................................40
1.4.3 Cuplaje electromagnetice ......................................................................................41
ALEGEREA PUTERII MOTOARELOR ELECTRICE DE ACIONARE ................................. 45
2.1 nclzirea i rcirea motoarelor electrice......................................................................................... 46
2.2 Servicii de funcionare ..................................................................................................................... 52
2.3 Alegerea puterii motoarelor electrice de acionare funcionnd..........................................................
n serviciu continuu ............................................................................................................................... 53
2.3.1 Alegerea puterii motoarelor electrice funcionnd n serviciu continuu cu sarcini
constante .......................................................................................................................53
2.3.2 Alegerea motoarelor electrice funcionnd n serviciu continuu cu sarcini variabile
n timp ..........................................................................................................................54
2.4 Alegerea puterii motoarelor electrice de acionare funcionnd n serviciu de scurt durat ........ 63
2.5 Alegerea puterii motoarelor electrice de acionare funcionnd n serviciu
intermitent .............................................................................................................................................. 64
ACIONRI ELECTRICE CU MAINI DE CURENT ALTERNATIV ..................................... 69
3.1 Calculul caracteristicilor mecanice ale motorului asincron trifazat ............................................... 69
3.1.1 Caracteristica mecanic natural ...........................................................................69
3.1.2 Caracteristicile mecanice artificiale reostatice .......................................................73
3.1.3 Caracteristicile mecanice artificiale de tensiune ....................................................75
3.1.4 Caracteristicile mecanice artificiale de frecven ...................................................77
PARTEA I
3.1.5 Modificarea turaiei motoarelor asincrone trifazate prin schimbarea numrului de
poli ...............................................................................................................................82
3.2 Caracteristicile mecanice ale motorului sincron trifazat ................................................................. 86
3.2.1 Caracteristica mecanic ........................................................................................86
3.2.2 Caracteristica unghiular ......................................................................................86
3.2.3 Reglarea turaiei motorului sincron .......................................................................88
3.3 Frnarea motoarelor de curent alternativ ........................................................................................ 89
3.3.1 Frnarea cu recuperare de energie (suprasincron) ................................................89
3.3.2 Frnarea prin contracurent ....................................................................................91
3.3.3 Frnarea dinamic ................................................................................................96
3.3.4 Frnarea motoarelor sincrone .............................................................................. 102
3.4 Regimul tranzitoriu al motorului asincron .................................................................................... 103
3.4.1 Procese tranzitorii la pornirea motorului asincron................................................ 105
3.4.2 Procese tranzitorii la frnarea i reversarea motorului asincron ............................ 107
3.5 Modificarea vitezei motoarelor de curent alternativ comandate de convertoare statice
de putere ............................................................................................................................................... 111
3.5.1 Invertoare trifazate de tensiune ............................................................................. 114
3.5.2 Invertoare trifazate de curent ........................................................................... 120
3.6 Comanda invertoarelor trifazate ......................................................................................... 122
3.7 Controlul micrii motoarelor de inducie trifazate alimentate de la frecven
variabil .............................................................................................................................................. 127
3.7.1 Controlul scalar al motoarelor de inducie ............................................................. 128
ACIONRI ELECTRICE CU MAINI DE C.C. ........................................................................ 141
4.1 Calculul caracteristicilor mecanice ale motoarelor de c.c. ........................................................... 141
4.1.2 Caracteristica mecanic natural a motorului de c.c. cu excitaie serie ................. 144
4.1.3 Caracteristica mecanic natural a motorului de c.c. cu excitaie mixt................ 150
4.1.4 Caracteristicile mecanice artificiale ale motoarelor de c.c. cu excitaie derivaie .. 151
4.1.5 Caracteristicile mecanice artificiale ale motoarelor de c.c. cu excitaie serie ........ 158
4.1.6 Caracteristicile mecanice artificiale ale motoarelor de c.c. cu excitaie mixt ....... 167
4.2 Frnarea motoarelor de c.c. ........................................................................................................... 169
4.2.1 Frnarea cu recuperare de energie ....................................................................... 170
4.2.2 Frnarea n contracurent (frnarea propriu-zis) .................................................. 172
4.2.3 Frnarea dinamic .............................................................................................. 176
4.3 Acionri de curent continuu cu tensiune reglabil ...................................................................... 179
4.3.1 Grupul generator-motor clasic (Ward-Leonard) .................................................. 179
4.3.2 Grupul generator-motor cu cuplu limitat ............................................................. 183
4.3.3 Grupul generator-motor cu curent constant n circuitul indusurilor ...................... 186
4.4 Sisteme de acionri electrice cu motoare de curent continuu alimentate de la mutatoare cu
tiristoare ............................................................................................................................................... 187
4.4.1 Motorul de c.c. cu excitaie independent alimentat de la mutatoare trifazate ...... 188
4.5 Sisteme de acionare cu motoare de curent continuu alimentate prin variatoare de tensiune
continu................................................................................................................................................ 193
4.5.1 Variatorul de tensiune continu de dou cadrane ................................................. 196
4.5.2 Variatoare de tensiune continu de patru cadrane ................................................ 198
4.1.1 Caracteristica mecanic natural a motorului de c.c. cu excitaie derivaie ........... 141
5.1 Rolul i elementele principale ale instalaiilor de ancorare .......................................................... 201
5.2 Prevederile societilor de clasificare ............................................................................................ 204
5.2.1 Instalaia de ancorare .......................................................................................... 204
5.2.2 Instalaia de legare .............................................................................................. 214
5.2.3 Instalaia de remorcare ........................................................................................ 215
5.3 Tipuri i parametri de baz ai mecanismelor de ancorare i legare.............................................. 216
5.4 Acionarea electric a mecanismelor de ancorare - acostare ........................................................ 218
5.5 Alegerea i verificarea motorului electric de acionare a mecanismelor de ancorare- acostare.
Exemplu de calcul. .............................................................................................................................. 221
5.5.1 Forele care acioneaz n lanul de ancor pe timpul staionrii navei la ancor .. 221
5.5.2 Forele care acioneaz n lanul de ancor, la barbotin pe timpul ridicrii ancorei
................................................................................................................................... 226
5.5.3 Alegerea motorului electric de acionare a mecanismului de ancorare- acostare. .. 230
5.5.4 Calculul diagramelor de sarcin i verificarea motorului electric ales .................. 232
5.6 Calculul puterii motorului pentru acionarea cabestanului de manevr
(legare) ............................................................................................................................................... 239
5.7 Scheme de comand pentru acionarea electric a mecanismelor de ancorare- acostare ........... 241
5.7.1 Clasificare. Tipuri de protecie electric .............................................................. 241
5.7.3 Scheme electrice de comand cu relee i contactoare ale acionrii cabestanelor
(vinciurilor) de ancor ................................................................................................. 247
ACIONAREA ELECTRIC A INSTALAIILOR DE NCRCARE DESCRCARE ..... 253
6.1 Destinaie, regimuri de lucru i tipurile mecanismelor navale de ncrcare ................................ 253
6.2 Prevederile societilor de clasificare ............................................................................................ 258
6.3 Stadiul actual i direcii de dezvoltare ........................................................................................... 262
6.3.1 Prezentarea general ........................................................................................... 262
6.3.2 Sisteme cu motor de execuie de curent alternativ ............................................... 262
6.4 Diagramele de sarcin ale mecanismelor de ncrcare descrcare ........................................... 263
6.5 Alegerea puterii motorului electric de acionare. Exemplul de calcul ......................................... 268
6.6 Scheme electrice de comand a acionrii instalaiilor de ncrcare descrcare ....................... 280
6.6.1 Scheme electrice de comand cu controler .......................................................... 280
6.6.2 Scheme electrice de comand cu relee i contactoare .......................................... 281
Acionarea electric cu motor asincron cu dou viteze ...................................................................... 281
ACIONAREA ELECTRIC A INSTALAIEI DE GUVERNARE ......................................... 295
7.1 Caracterizare general, cerine i clasificri .................................................................................. 295
7.2 Calculul diagramei de sarcin ....................................................................................................... 298
7.3 Mecanisme de transmisie .............................................................................................................. 310
7.3.1 Transmisii mecanice pentru crme ...................................................................... 310
7.3.2 Transmisii hidraulice pentru crme ..................................................................... 312
7.4 Scheme electrice de acionare a crmei ........................................................................................ 318
7.4.1 Scheme electrice de comand a acionrilor electromecanice .............................. 318
7.4.2 Motoare electrice folosite pentru crme cu transmisie hidraulic ......................... 331
7.5 Alegerea i verificarea motorului electric de acionare ................................................................ 333
7.5.1 Calculul acionrii electromecanice a crmei ....................................................... 333
7.5.2 Calculul acionrii electrohidraulice a crmei ...................................................... 352
ACIONAREA ELECTRIC A INSTALAIILOR DE ANCORARE - ACOSTARE ............ 201
PARTEA A II-A
ACIONAREA ELECTRIC A MECANISMELOR AUXILIARE........................................... 365
8.1 Generaliti .................................................................................................................................... 365
8.2 Caracteristicile de baz ale mecanismelor auxiliare ..................................................................... 366
8.3 Alegerea motoarelor electrice de acionare................................................................................... 372
8.4 Scheme electrice de comand a acionrii pentru mecanismele auxiliare ................................... 381
BIBLIOGRAFIE ................................................................................................................................ 403
201
ACIONAREA ELECTRIC A INSTALAIILOR DE ANCORARE -
ACOSTARE
5.1 Rolul i elementele principale ale instalaiilor de ancorare
Instalaia de ancorare are rolul de a asigura staionarea sigur a navei n diferite
condiii.
La staionarea navei n rade deschise sau nchise, aceasta este supus aciunii
forei datorate vntului, forei datorate curenilor marini i forei datorate valurilor. Pentru
a asigura meninerea navei pe loc n aceste condiii este necesar ca s fie legat de sol cu
o legtur flexibil care s-i permit deplasri n jurul unui punct fix. Legarea navei de sol
se face cu ajutorul lanului de ancor i al ancorei.
Instalaia de ancorare se compune din urmtoarele elemente principale: ancore,
lanuri pentru ancore, mecanisme de transmisie, cabestan sau vinci, motor electric de
execuie i sistemul de comand.
n figura 5.1 este prezentat dispunerea general a instalaiei de ancorare.
Lanul ancorei are un capt legat de ancor (1), iar cellalt capt este legat de
corpul navei printr-o cheie de mpreunare. El se dispune de la ancor prin nara (3), stopa
(4) care susine ancora i lanul, barbotina cabestanului (5), nara n punte (6) i puul
lanului (7). Cabestanul este pus n micare de motorul electric (8) prin intermediul
transmisiei (9). ntre motorul electric i mecanismul de transmisie se monteaz frna
electromagnetic (10). Instalaia de comand a motorului electric se compune din:
controlerul (11), tabloul cu contactoare i relee (12) i cutia cu rezistene de pornire i
reglaj (13).
Ancorele care se folosesc frecvent sunt de dou tipuri: ancore tip amiralitate i
ancore cu bra articulat. Ancora tip amiralitate are mai mare putere de susinere, ns se
prefer de obicei cellalt tip de ancor care are gabarite mai mici, se dispune i se strnge
mai uor.
Ca mecanisme pentru coborrea i ridicarea ancorelor se folosesc cabestanele sau
vinciurile. Cabestanele au axa barbotinei situat vertical i ntregul mecanism de
transmisie dispus sub puntea principal, iar vinciurile, spre deosebire de cabestane, au axa
orizontal i transmisia mecanic dispus pe punte.
Lanul se aeaz pe barbotin care are la periferie locauri n care intr complet o
verig a lanului, astfel ca la rotirea acesteia lanul s fie tras la bord.
Tamburul de manevr este destinat pentru strngerea parmelor de legare. El are
o form concav, pentru ca parma care se strnge s nu cad de pe el. Pe suprafaa
tamburului de manevr exist o serie de proeminene, numite nervuri, pentru ca parma s
se aeze ct mai strns pe acesta.
202
Fig. 5.1 Dispunerea general a instalaiei de ancorare
n figura 5.2 este prezentat schema cinematic a cabestanului de ancor.
1 - motor electric;
2 - transmisie melc - roat melcat;
3 - ax;
4 - barbotin;
5 - discuri de friciune;
6 - tambur de manevr;
7 - frn electromagnetic.
Fig 5.2 Schema cinematic a cabestanului de ancor
Barbotina i tamburul de acostare sunt cuplate cu axul (3) al cabestanului prin
discurile de friciune (5). Forele de frecare i deci cuplurile transmise prin friciune
axului cabestanului se regleaz cu ajutorul resorturilor, astfel nct s se evite aplicarea
unor suprasarcini extreme la axul motorului electric de acionare a cabestanului.
Cnd fora de apsare pe discuri, creat prin tensionarea unor resorturi acionate
printr-un sistem mecanic de o roat, este nul, tamburul de manevr i barbotina se mic
liber fa de ax. Aceast manevr se execut la fundarisirea ancorei, cnd sub aciunea
greutii proprii ancora se fileaz rotind barbotina i tamburul n gol.
Pentru ridicarea ancorei se preseaz discurile (5) i barbotina va fi cuplat prin
friciune cu axul (3). Motorul electric de execuie (1) rotete axul (3) i mpreun cu
acesta se va roti barbotina (4), virnd lanul ancorei la bordul navei.
203
n figura 5.3 este reprezentat schema cinematic a unui vinci de ancor.
1 - tamburul de manevr;
2 - barbotina;
3 - manon de cuplare;
4 - roat dinat;
5 - transmisie melc - roat melcat;
6 - frn electromagnetic;
7 - motor electric;
8 - ax.
Fig. 5.3 Schema cinematic a vinciului de ancor
Cuplul motorului electric se transmite prin transmisia melc - roat melcat (5),
roilor dinate (4) i axului (8). Axul (8) este cuplat printr-o legtur mecanic mobil cu
barbotinele (2). Legtura mobil se realizeaz cu manoanele de cuplare cu came (3), care
se pot deplasa axial de-a lungul unor pene realiznd cuplarea i decuplarea barbotinelor
(2) de axul (8). Cu ajutorul vinciului de ancor se pot vira n acelai timp una sau dou
ancore.
Aspectul general al unui vinci de ancor este prezentat n figura 5.4.
Fig. 5.4 Aspectul general al vinciului de ancor
Frna electromagnetic prevzut n schemele cinematice execut frnarea
mecanic a axului motorului electric n absena alimentrii cu energie electric. Atunci
cnd electromagnetul frnei este alimentat se realizeaz deblocarea axului motorului
electric.
Frnele electromagnetice pot fi cu band sau saboi. n prezent, cunoate o larg
utilizare frna disc nglobat n construcia motorului electric destinat pentru acionarea
vinciurilor sau cabestanelor.
204
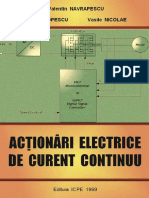
n figura 5.5 se prezint elementele componente ale frnei disc.
Prin buca (1) se fixeaz pe axul motorului electric (2) discul (3) care se rotete
mpreun cu acesta. Sistemul de prindere al discului (3) i permite s se deplaseze axial.
Pe ambele fee ale discului este fixat cu nituri materialul de friciune (4). Discul este
nchis ntr-o carcas turnat (5) fixat pe scutul
motorului electric i care face corp comun cu partea fix
a electromagnetului. Electromagnetul este format din
corpul turnat (6), bobina (7) i armtura mobil cu disc
(8). n situaia n care bobina frnei nu este alimentat,
armtura mobil (8) sub aciunea resortului (9) preseaz
discul mobil (4) ntre carcasa (5) i discul (8), realiznd
frnarea mecanic a axului motorului electric. La
alimentarea motorului electric se alimenteaz concomi-
tent i bobina frnei electromagnetice. Armtura mobil
(8) este atras nvingnd aciunea resortului (9) i prin
aceasta axul motorului electric este eliberat de aciunea
frnei mecanice.
5.2 Prevederile societilor de clasificare
5.2.1 Instalaia de ancorare
Orice nav trebuie s aib un echipament de
ancorare. Pentru navele cu propulsie, cu excepia navelor de pescuit, echipamentul de
ancorare se alege din tabelul 5.1, iar pentru navele de pescuit propulsate din tabelul 5.2 n
funcie de caracteristica de dotare a navei.
Caracteristica de dotare, Na, pentru nave, se calculeaz n modul urmtor:
A 1 , 0 h B 2 Na
3 2
+ +
n care:
- deplasamentul volumetric al pescajului corespunztor liniei de ncrcare de
var [m
3
];
B - limea navei [m];
h - nlimea de la linia de ncrcare de var pn la faa superioar a nveliului punii
celui mai nalt ruf, care se calculeaz n modul urmtor:
[ ]
+ m h a h
i
n care:
Fig. 5.5 Frna disc
(5.1)
(5.2)
205
a - distana msurat pe vertical, la seciunea maestr, de la linia de ncrcare pn
la faa superioar a nveliului punii superioare [m];
h
i
- nlimea n plan diametral, a fiecrui nivel al suprastructurii sau rufului cu o
lime mai mare de 0,25B [m];
Dac la nav sunt dou sau mai multe suprastructuri, n calcul se va lua numai
cea mai nalt.
A - suprafaa velic n limitele lungimii navei considerat de la linia de ncrcare
[m
2
]. La determinarea valorii A se va ine seama numai de suprafaa velic a corpului,
suprastructurilor i rufurilor avnd limea mai mare de 0,25B.
Alegerea echipamentului de ancorare conform tabelului 5.1 i tabelului 5.2
corespunde pentru nave cu regiunea de navigaie 1. Pentru alte nave cu regiunea de
navigaie 2 sau 3 la alegerea echipamentului de ancorare caracteristica de dotare se
micoreaz cu:
15% pentru nave cu regiunea de navigaie 2;
25% pentru nave cu regiunea de navigaie 3.
Regiunile de navigaie pentru care se construiesc navele, se clasific astfel:
0 - nave destinate navigaiei maritime nelimitate;
1 - nave destinate navigaiei n mri deschise, n larg, la distane fa de locurile
de adpost sub 200Mm sau pe parcursuri n care distanele dintre aceste locuri sunt sub
400 Mm;
2 - nave destinate navigaiei n mri deschise, n larg, la distane fa de locurile
de adpost sub 50Mm, sau pe parcursuri n care distanele dintre aceste locuri sunt sub
100 Mm;
3 - nave destinate navigaiei maritime costiere sau n golfuri.
n funcie de caracteristicile mecanice ale oelurilor din care se execut lanurile
de ancor acestea sunt de trei tipuri corespunztoare a trei categorii de oeluri:
tip 1 - oel categorie 1 cu Rm = 305 490 N/mm
2
;
tip 2 - oel categorie 2 cu Rm = 490 N/mm
2
;
tip 3 - oel categorie 3 cu Rm = 690 N/mm
2
n care Rm reprezint rezistena la rupere a materialului.
Lanurile de ancor se alctuiesc din chei de lan. Cheile sunt mbinate ntre ele
cu ajutorul zalelor de mpreunare (Kenter).
Dup poziia pe care o ocup n lan, cheile de lan se mpart n:
- cheie de lan de ancor, care se prinde de ancor;
- chei de lan intermediare;
- cheie de lan de capt, care se fixeaz la dispozitivul de declanare a
lanului.
Cheile de lan intermediare au lungimea cuprins ntre 25m i 27,5m numrul
zalelor fiind ntotdeauna impar.
Pentru fundarisirea i virarea ancorelor principale, avnd masa mai mare de 35kg,
precum i pentru asigurarea ancorajului se instaleaz pe puntea navei, la prova,
mecanismul de ancorare. Puterea motorului de acionare a mecanismului de ancorare
trebuie s asigure tragerea nentrerupt timp de 30 minute a unui lan de ancor mpreun
206
cu ancora, cu o vitez de cel puin 9m/min i cu o for de traciune la barbotin F
1
cel
puin egal cu cea determinat cu formula:
[ ] F , a d
2
1
9 8 N ( 5.3)
unde: a = 3,75 pentru lanuri de categoria 1;
a = 4,25 pentru lanuri de categoria 2;
a = 4,75 pentru lanuri de categoria 3;
d - diametrul (calibrul) lanului n [mm].
Pentru navele de aprovizionare fora de traciune la barbotin P
2
nu trebuie s fie mai
mic dect cea determinat cu formula:
( ) [ ] F , q H M
2
11 1 N +
n care:
q - masa unui metru liniar de lan de ancor [kg/m];
H - adncimea de ancorare [m], dar nu mai puin de:
- 200m pentru nave cu caracteristica de dotare pn la 720;
- 250m pentru nave cu caracteristica de dotare mai mare de 720;
M -masa ancorei [kg].
(5.4)
2
0
7
T
a
b
e
l
u
l
5
.
1
C
a
r
a
c
t
e
r
i
s
t
i
c
a
d
e
d
o
t
a
r
e
N
a
A
n
c
o
r
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
r
i
p
e
n
t
r
u
a
n
c
o
r
e
l
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
l
s
a
u
c
a
b
l
u
l
d
e
o
e
l
p
e
n
t
r
u
a
n
c
o
r
a
r
e
d
e
c
u
r
e
n
t
P
a
r
m
a
d
e
r
e
m
o
r
c
P
a
r
m
a
d
e
l
e
g
a
r
e
C
a
l
i
b
r
u
l
m
a
i
m
a
r
e
n
u
m
a
i
m
a
r
e
n
u
m
r
m
a
s
a
f
i
e
c
r
e
i
a
n
c
o
r
e
m
a
s
a
a
n
c
o
r
e
i
d
e
c
u
r
e
n
t
l
u
n
g
i
m
e
a
t
o
t
a
l
a
d
o
u
l
a
n
u
r
i
t
i
p
1
t
i
p
2
t
i
p
3
l
u
n
g
i
m
e
s
a
r
c
i
n
a
d
e
r
u
p
e
r
e
l
u
n
g
i
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
p
t
.
p
a
r
m
e
d
e
o
e
l
n
u
m
r
l
u
n
g
i
m
e
a
f
i
e
c
r
e
i
p
a
r
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
a
p
a
r
m
e
i
d
e
o
e
l
k
g
k
g
m
m
m
m
m
m
m
m
k
N
m
k
N
m
k
N
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
0
1
5
2
3
5
-
1
1
0
-
-
-
-
-
-
-
2
3
0
2
9
1
5
2
0
2
5
0
-
1
3
7
,
5
*
-
-
-
-
-
-
2
3
0
2
9
2
0
2
5
2
6
5
-
1
6
5
-
-
-
-
-
-
-
2
4
0
2
9
2
5
3
0
2
8
0
-
1
6
5
1
1
-
-
-
-
-
-
2
5
0
2
9
3
0
4
0
2
1
0
5
3
5
1
9
2
,
5
1
1
-
-
5
5
5
5
1
2
0
6
5
2
5
0
2
9
4
0
5
0
2
1
3
5
4
5
1
9
2
,
5
1
2
,
5
-
-
7
0
6
0
1
5
0
8
1
2
5
0
2
9
5
0
7
0
2
1
8
0
6
0
2
2
0
1
4
1
2
5
-
8
0
6
5
1
8
0
9
8
3
8
0
3
1
7
0
9
0
2
2
4
0
8
0
2
2
0
1
6
1
4
-
8
5
7
4
1
8
0
9
8
3
1
0
0
3
7
9
0
1
1
0
2
3
0
0
1
0
0
2
4
7
,
5
1
7
,
5
1
6
-
8
5
8
1
1
8
0
9
8
3
1
1
0
3
9
1
1
0
1
3
0
2
3
6
0
1
2
0
2
4
7
,
5
1
9
1
7
,
5
-
9
0
8
9
1
8
0
9
8
3
1
1
0
4
4
1
3
0
1
5
0
2
4
2
0
1
4
0
2
7
5
2
0
,
5
1
7
,
5
-
9
0
9
8
1
8
0
9
8
3
1
2
0
4
9
1
5
0
1
7
5
2
4
8
0
1
6
5
2
7
5
2
2
1
9
-
9
0
1
0
8
1
8
0
9
8
3
1
2
0
5
4
1
7
5
2
0
5
2
5
7
0
1
9
0
3
0
2
,
5
2
4
2
0
,
5
-
9
0
1
1
8
1
8
0
1
1
2
3
1
2
0
5
9
2
0
5
2
4
0
3
6
6
0
-
3
0
2
,
5
2
6
2
2
2
0
,
5
-
-
1
8
0
1
2
9
4
1
4
0
6
4
2
0
8
C
a
r
a
c
t
e
r
i
s
t
i
c
a
d
e
d
o
t
a
r
e
N
a
A
n
c
o
r
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
r
i
p
e
n
t
r
u
a
n
c
o
r
e
l
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
l
s
a
u
c
a
b
l
u
l
d
e
o
e
l
p
e
n
t
r
u
a
n
c
o
r
a
r
e
d
e
c
u
r
e
n
t
P
a
r
m
a
d
e
r
e
m
o
r
c
P
a
r
m
a
d
e
l
e
g
a
r
e
C
a
l
i
b
r
u
l
m
a
i
m
a
r
e
n
u
m
a
i
m
a
r
e
n
u
m
r
m
a
s
a
f
i
e
c
r
e
i
a
n
c
o
r
e
m
a
s
a
a
n
c
o
r
e
i
d
e
c
u
r
e
n
t
l
u
n
g
i
m
e
a
t
o
t
a
l
a
d
o
u
l
a
n
u
r
i
t
i
p
1
t
i
p
2
t
i
p
3
l
u
n
g
i
m
e
s
a
r
c
i
n
a
d
e
r
u
p
e
r
e
l
u
n
g
i
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
p
t
.
p
a
r
m
e
d
e
o
e
l
n
u
m
r
l
u
n
g
i
m
e
a
f
i
e
c
r
e
i
p
a
r
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
a
p
a
r
m
e
i
d
e
o
e
l
k
g
k
g
m
m
m
m
m
m
m
m
k
N
m
k
N
m
k
N
2
4
0
2
8
0
3
7
8
0
-
3
3
0
2
8
2
4
2
2
-
-
1
8
0
1
5
0
4
1
2
0
6
9
2
8
0
3
2
0
3
9
0
0
-
3
5
7
,
5
3
0
2
6
2
4
-
-
1
8
0
1
7
4
4
1
4
0
7
4
3
2
0
3
6
0
3
1
0
2
0
-
3
5
7
,
5
3
2
2
8
2
4
-
-
1
8
0
2
0
7
4
1
4
0
7
8
3
6
0
4
0
0
3
1
1
4
0
-
3
8
5
3
4
3
0
2
6
-
-
1
8
0
2
2
4
4
1
4
0
8
8
4
0
0
4
5
0
3
1
2
9
0
-
3
8
5
3
6
3
2
2
8
-
-
1
8
0
2
5
0
4
1
4
0
9
8
4
5
0
5
0
0
3
1
4
4
0
-
4
1
2
,
5
3
8
3
4
3
0
-
-
1
8
0
2
7
6
4
1
4
0
1
0
8
5
0
0
5
5
0
3
1
5
9
0
-
4
1
2
,
5
4
0
3
4
3
0
-
-
1
9
0
3
0
6
4
1
6
0
1
2
3
5
5
0
6
0
0
3
1
7
4
0
-
4
4
0
4
2
3
6
3
2
-
-
1
9
0
3
3
8
4
1
6
0
1
3
2
6
0
0
6
6
0
3
1
9
2
0
-
4
4
0
4
4
3
8
3
4
-
-
1
9
0
3
7
1
4
1
6
0
1
4
5
6
6
0
7
2
0
3
2
1
0
0
-
4
4
0
4
6
4
0
3
6
-
-
1
9
0
4
0
6
4
1
6
0
1
5
7
7
2
0
7
8
0
3
2
2
8
0
-
4
6
7
,
5
4
8
4
2
3
6
-
-
1
9
0
4
4
1
4
1
7
0
1
7
2
7
8
0
8
4
0
3
2
4
6
0
-
4
6
7
,
5
5
0
4
4
3
8
-
-
1
9
0
4
8
0
4
1
7
0
1
8
6
8
4
0
9
1
0
3
2
8
4
0
-
4
6
7
,
5
5
2
4
6
4
0
-
-
1
9
0
5
1
8
4
1
7
0
2
0
3
9
1
0
9
8
0
3
2
8
5
0
-
4
9
5
5
4
4
8
4
2
-
-
1
9
0
5
5
9
4
1
7
0
2
1
6
2
0
9
C
a
r
a
c
t
e
r
i
s
t
i
c
a
d
e
d
o
t
a
r
e
N
a
A
n
c
o
r
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
r
i
p
e
n
t
r
u
a
n
c
o
r
e
l
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
l
s
a
u
c
a
b
l
u
l
d
e
o
e
l
p
e
n
t
r
u
a
n
c
o
r
a
r
e
d
e
c
u
r
e
n
t
P
a
r
m
a
d
e
r
e
m
o
r
c
P
a
r
m
a
d
e
l
e
g
a
r
e
C
a
l
i
b
r
u
l
m
a
i
m
a
r
e
n
u
m
a
i
m
a
r
e
n
u
m
r
m
a
s
a
f
i
e
c
r
e
i
a
n
c
o
r
e
m
a
s
a
a
n
c
o
r
e
i
d
e
c
u
r
e
n
t
l
u
n
g
i
m
e
a
t
o
t
a
l
a
d
o
u
l
a
n
u
r
i
t
i
p
1
t
i
p
2
t
i
p
3
l
u
n
g
i
m
e
s
a
r
c
i
n
a
d
e
r
u
p
e
r
e
l
u
n
g
i
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
p
t
.
p
a
r
m
e
d
e
o
e
l
n
u
m
r
l
u
n
g
i
m
e
a
f
i
e
c
r
e
i
p
a
r
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
a
p
a
r
m
e
i
d
e
o
e
l
k
g
k
g
m
m
m
m
m
m
m
m
k
N
m
k
N
m
k
N
9
8
0
1
0
6
0
3
3
0
6
0
-
4
9
5
5
6
5
0
4
4
-
-
2
0
0
6
0
4
4
1
8
0
2
3
0
1
0
6
0
1
1
4
0
3
3
3
0
0
-
4
9
5
5
8
5
0
4
6
-
-
2
0
0
6
4
7
4
1
8
0
2
5
0
1
1
4
0
1
2
2
0
3
3
5
4
0
-
5
2
2
,
5
6
0
5
2
4
6
-
-
2
0
0
6
9
1
4
1
8
0
2
7
0
1
2
2
0
1
3
0
0
3
3
7
8
0
-
5
2
2
,
5
6
2
5
4
4
8
-
-
2
0
0
7
3
8
4
1
8
0
2
8
4
1
3
0
0
1
3
9
0
3
4
0
5
0
-
5
2
2
,
5
6
4
5
6
5
0
-
-
2
0
0
7
8
6
4
1
8
0
3
0
9
1
3
9
0
1
4
8
0
3
4
3
2
0
-
5
5
0
6
6
5
8
5
0
-
-
2
0
0
8
3
6
4
1
8
0
3
2
4
1
4
8
0
1
5
7
0
3
4
5
0
0
-
5
5
0
6
8
6
0
5
2
-
-
2
2
0
8
8
8
5
1
9
0
3
2
4
1
5
7
0
1
6
7
0
3
4
8
0
0
-
5
5
0
7
0
6
2
5
4
-
-
2
2
0
9
4
1
5
1
9
0
3
3
3
1
6
7
0
1
7
9
0
3
5
2
5
0
-
5
7
7
,
5
7
3
6
4
5
6
-
-
2
2
0
1
0
2
4
5
1
9
0
3
6
9
1
7
9
0
1
9
3
0
3
5
6
1
0
-
5
7
7
,
5
7
6
6
6
5
8
-
-
2
2
0
1
1
0
9
5
1
9
0
3
7
8
1
9
3
0
2
0
8
0
3
6
0
0
0
-
5
7
7
,
5
7
8
6
8
6
0
-
-
2
2
0
1
1
6
8
5
1
9
0
4
0
2
2
0
8
0
2
2
3
0
3
6
4
5
0
-
6
0
5
8
1
7
0
6
2
-
-
2
4
0
1
2
5
0
5
2
0
0
4
2
2
2
2
3
0
2
3
8
0
3
6
9
0
0
-
6
0
5
8
4
7
3
6
4
-
-
2
4
0
1
3
5
6
5
2
0
0
4
5
1
2
1
0
C
a
r
a
c
t
e
r
i
s
t
i
c
a
d
e
d
o
t
a
r
e
N
a
A
n
c
o
r
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
r
i
p
e
n
t
r
u
a
n
c
o
r
e
l
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
l
s
a
u
c
a
b
l
u
l
d
e
o
e
l
p
e
n
t
r
u
a
n
c
o
r
a
r
e
d
e
c
u
r
e
n
t
P
a
r
m
a
d
e
r
e
m
o
r
c
P
a
r
m
a
d
e
l
e
g
a
r
e
C
a
l
i
b
r
u
l
m
a
i
m
a
r
e
n
u
m
a
i
m
a
r
e
n
u
m
r
m
a
s
a
f
i
e
c
r
e
i
a
n
c
o
r
e
m
a
s
a
a
n
c
o
r
e
i
d
e
c
u
r
e
n
t
l
u
n
g
i
m
e
a
t
o
t
a
l
a
d
o
u
l
a
n
u
r
i
t
i
p
1
t
i
p
2
t
i
p
3
l
u
n
g
i
m
e
s
a
r
c
i
n
a
d
e
r
u
p
e
r
e
l
u
n
g
i
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
p
t
.
p
a
r
m
e
d
e
o
e
l
n
u
m
r
l
u
n
g
i
m
e
a
f
i
e
c
r
e
i
p
a
r
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
a
p
a
r
m
e
i
d
e
o
e
l
k
g
k
g
m
m
m
m
m
m
m
m
k
N
m
k
N
m
k
N
2
3
8
0
2
5
3
0
3
7
3
5
0
-
6
0
5
8
7
7
6
6
6
-
-
2
4
0
1
4
5
3
5
2
0
0
4
8
0
2
5
3
0
2
7
0
0
3
7
8
0
0
-
6
3
2
,
5
9
0
7
8
6
8
-
-
2
6
0
1
4
7
1
6
2
0
0
4
8
0
2
7
0
0
2
8
7
0
3
8
3
0
0
-
6
3
2
,
5
9
2
8
1
7
0
-
-
2
6
0
1
4
7
1
6
2
0
0
4
9
0
2
8
7
0
3
0
4
0
3
8
7
0
0
-
6
3
2
,
5
9
5
8
4
7
3
-
-
2
6
0
1
4
7
1
6
2
0
0
5
0
0
3
0
4
0
3
2
1
0
3
9
3
0
0
-
6
6
0
9
7
8
4
7
6
-
-
2
8
0
1
4
7
1
6
2
0
0
5
2
0
3
2
1
0
3
4
0
0
3
9
9
0
0
-
6
6
0
1
0
0
8
7
7
8
-
-
2
8
0
1
4
7
1
6
2
0
0
5
5
4
3
4
0
0
3
6
0
0
3
1
0
5
0
0
-
6
6
0
1
0
2
9
0
7
8
-
-
2
8
0
1
4
7
1
6
2
0
0
5
8
8
3
6
0
0
3
8
0
0
3
1
1
1
0
0
-
6
8
7
,
5
1
0
5
9
2
8
1
-
-
3
0
0
1
4
7
1
6
2
0
0
6
1
8
3
8
0
0
4
0
0
0
3
1
1
7
0
0
-
6
8
7
,
5
1
0
7
9
5
8
4
-
-
3
0
0
1
4
7
1
6
2
0
0
6
4
7
4
0
0
0
4
2
0
0
3
1
2
3
0
0
-
6
8
7
,
5
1
1
1
9
7
8
7
-
-
3
0
0
1
4
7
1
7
2
0
0
6
4
7
4
2
0
0
4
4
0
0
3
1
2
9
0
0
-
7
1
5
1
1
4
1
0
0
8
7
-
-
3
0
0
1
4
7
1
7
2
0
0
6
5
7
4
4
0
0
4
6
0
0
3
1
3
5
0
0
-
7
1
5
1
1
7
1
0
2
9
0
-
-
3
0
0
1
4
7
1
7
2
0
0
6
6
7
4
6
0
0
4
8
0
0
3
1
4
1
0
0
-
7
1
5
1
2
0
1
0
5
9
2
-
-
3
0
0
1
4
7
1
7
2
0
0
6
7
7
4
8
0
0
5
0
0
0
3
1
4
7
0
0
-
7
4
2
,
5
1
2
2
1
0
7
9
5
-
-
3
0
0
1
4
7
1
7
2
0
0
6
8
6
2
1
1
C
a
r
a
c
t
e
r
i
s
t
i
c
a
d
e
d
o
t
a
r
e
N
a
A
n
c
o
r
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
r
i
p
e
n
t
r
u
a
n
c
o
r
e
l
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
l
s
a
u
c
a
b
l
u
l
d
e
o
e
l
p
e
n
t
r
u
a
n
c
o
r
a
r
e
d
e
c
u
r
e
n
t
P
a
r
m
a
d
e
r
e
m
o
r
c
P
a
r
m
a
d
e
l
e
g
a
r
e
C
a
l
i
b
r
u
l
m
a
i
m
a
r
e
n
u
m
a
i
m
a
r
e
n
u
m
r
m
a
s
a
f
i
e
c
r
e
i
a
n
c
o
r
e
m
a
s
a
a
n
c
o
r
e
i
d
e
c
u
r
e
n
t
l
u
n
g
i
m
e
a
t
o
t
a
l
a
d
o
u
l
a
n
u
r
i
t
i
p
1
t
i
p
2
t
i
p
3
l
u
n
g
i
m
e
s
a
r
c
i
n
a
d
e
r
u
p
e
r
e
l
u
n
g
i
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
p
t
.
p
a
r
m
e
d
e
o
e
l
n
u
m
r
l
u
n
g
i
m
e
a
f
i
e
c
r
e
i
p
a
r
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
a
p
a
r
m
e
i
d
e
o
e
l
k
g
k
g
m
m
m
m
m
m
m
m
k
N
m
k
N
m
k
N
5
0
0
0
5
2
0
0
3
1
5
7
0
0
-
7
4
2
,
5
1
2
4
1
1
1
9
7
-
-
3
0
0
1
4
7
1
8
2
0
0
6
8
6
5
2
0
0
5
5
0
0
3
1
6
5
0
0
-
7
4
2
,
5
1
2
7
1
1
1
9
7
-
-
3
0
0
1
4
7
1
8
2
0
0
6
9
6
5
5
0
0
5
8
0
0
3
1
6
9
0
0
-
7
4
2
,
5
1
3
0
1
1
4
1
0
0
-
-
3
0
0
1
4
7
1
8
2
0
0
7
0
6
5
8
0
0
6
1
0
0
3
1
7
8
0
0
-
7
4
2
,
5
1
3
2
1
1
7
1
0
2
-
-
3
0
0
1
4
7
1
9
2
0
0
7
0
6
6
1
0
0
6
5
0
0
3
1
8
8
0
0
-
7
4
2
,
5
-
1
2
0
1
0
7
-
-
-
-
9
2
0
0
7
1
6
6
5
0
0
6
9
0
0
3
2
0
0
0
0
-
7
7
0
-
1
2
4
1
1
1
-
-
L
a
n
a
v
e
l
e
c
u
l
u
n
g
i
m
e
a
m
a
i
m
a
r
e
d
e
1
8
0
m
p
o
a
t
e
s
n
u
f
i
e
p
r
e
v
z
u
t
p
a
r
m
a
d
e
r
e
m
o
r
c
9
2
0
0
7
2
6
6
9
0
0
7
4
0
0
3
2
1
5
0
0
-
7
7
0
-
1
2
7
1
1
4
-
-
1
0
2
0
0
7
2
6
7
4
0
0
7
9
0
0
3
2
3
0
0
0
-
7
7
0
-
1
3
2
1
1
7
-
-
1
1
2
0
0
7
2
6
7
9
0
0
8
4
0
0
3
2
4
5
0
0
-
7
7
0
-
1
3
7
1
2
2
-
-
1
1
2
0
0
7
3
6
8
4
0
0
8
6
0
0
3
2
6
0
0
0
-
7
7
0
-
1
4
2
1
2
7
-
-
1
2
2
0
0
7
3
6
8
9
0
0
9
4
0
0
3
2
7
5
0
0
-
7
7
0
-
1
4
7
1
3
2
-
-
1
3
2
0
0
7
3
6
9
4
0
0
1
0
0
0
0
3
2
9
0
0
0
-
7
7
0
-
1
5
2
1
3
2
-
-
1
4
2
0
0
7
3
6
1
0
0
0
0
1
0
7
0
0
3
3
1
0
0
0
-
7
7
0
-
-
1
3
7
-
-
1
5
2
0
0
7
3
6
1
0
7
0
0
1
1
5
0
0
3
3
3
0
0
0
-
7
7
0
-
-
1
4
2
-
-
1
6
2
0
0
7
3
6
2
1
2
C
a
r
a
c
t
e
r
i
s
t
i
c
a
d
e
d
o
t
a
r
e
N
a
A
n
c
o
r
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
r
i
p
e
n
t
r
u
a
n
c
o
r
e
l
e
p
r
i
n
c
i
p
a
l
e
L
a
n
u
l
s
a
u
c
a
b
l
u
l
d
e
o
e
l
p
e
n
t
r
u
a
n
c
o
r
a
r
e
d
e
c
u
r
e
n
t
P
a
r
m
a
d
e
r
e
m
o
r
c
P
a
r
m
a
d
e
l
e
g
a
r
e
C
a
l
i
b
r
u
l
m
a
i
m
a
r
e
n
u
m
a
i
m
a
r
e
n
u
m
r
m
a
s
a
f
i
e
c
r
e
i
a
n
c
o
r
e
m
a
s
a
a
n
c
o
r
e
i
d
e
c
u
r
e
n
t
l
u
n
g
i
m
e
a
t
o
t
a
l
a
d
o
u
l
a
n
u
r
i
t
i
p
1
t
i
p
2
t
i
p
3
l
u
n
g
i
m
e
s
a
r
c
i
n
a
d
e
r
u
p
e
r
e
l
u
n
g
i
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
p
t
.
p
a
r
m
e
d
e
o
e
l
n
u
m
r
l
u
n
g
i
m
e
a
f
i
e
c
r
e
i
p
a
r
m
e
f
o
r
a
t
o
t
a
l
d
e
r
u
p
e
r
e
a
p
a
r
m
e
i
d
e
o
e
l
k
g
k
g
m
m
m
m
m
m
m
m
k
N
m
k
N
m
k
N
1
1
5
0
0
1
2
4
0
0
3
3
5
5
0
0
-
7
7
0
-
-
1
4
7
-
-
1
7
2
0
0
7
3
6
1
2
4
0
0
1
3
4
0
0
3
3
8
5
0
0
-
7
7
0
-
-
1
5
2
-
-
1
8
2
0
0
7
3
6
1
3
4
0
0
1
4
6
0
0
3
4
2
0
0
0
-
7
7
0
-
-
1
5
7
-
-
1
9
2
0
0
7
3
6
1
4
6
0
0
1
6
0
0
0
3
4
6
0
0
0
-
7
7
0
-
-
1
6
2
-
-
2
1
2
0
0
7
3
6
N
o
t
:
-
t
i
p
1
=
l
a
n
d
i
n
o
e
l
c
a
t
e
g
o
r
i
a
1
;
-
t
i
p
2
=
l
a
n
d
i
n
o
e
l
c
a
t
e
g
o
r
i
a
2
;
-
t
i
p
3
=
l
a
n
d
i
n
o
e
l
c
a
t
e
g
o
r
i
a
3
;
*
p
o
a
t
e
f
i
u
t
i
l
i
z
a
t
l
a
n
s
a
u
c
a
b
l
u
d
e
o
e
l
,
s
a
r
c
i
n
a
d
e
r
u
p
e
r
e
a
l
a
n
u
l
u
i
s
a
u
c
a
b
l
u
l
u
i
p
o
a
t
e
f
i
d
e
c
e
l
p
u
i
n
4
4
k
N
213
Tabelul 5.2
Caracteristica de
dotare Na
Ancore
principale
Lanuri pentru ancore
principale
Parme de legare
mai mare
nu
mai
mare
numr
masa
fiecrei
ancore
lungimea
total
calibrul
numr
lungimea
fiecrei
parme
fora total
de rupere a parmei de
oel
tip 1 tip 2
kg m mm mm m kN
1 2 3 4 5 6 7 8 9 10
10 15 1 30 55 * - 2 30 29
15 20 1 40 55 * - 2 30 29
20 25 1 50 82,5 * - 2 40 29
25 30 1 60 82,5 * - 2 50 29
30 40 1 80 82,5 11 - 2 50 29
40 50 2 100 192,5 11 - 2 60 29
50 60 2 120 192,5 12,5 - 2 60 29
60 70 2 140 192,5 12,5 - 2 80 29
70 80 2 160 220 12,5 11 2 100 34
80 90 2 180 220 14 12,5 2 100 34
90 100 2 210 220 16 14 2 110 37
100 110 2 240 220 16 14 2 110 39
110 120 2 270 247,5 17,5 16 2 110 39
120 130 2 300 247,5 17,5 16 2 110 44
130 140 2 340 275 19 17,5 2 120 44
140 150 2 390 275 19 17,5 2 120 49
150 175 2 480 275 22 19 2 120 54
175 205 2 570 302,5 24 20,5 2 120 59
205 240 2 660 302,5 26 22 2 120 64
240 280 2 780 330 28 24 3 120 71
280 320 2 900 357,5 30 26 3 140 78
320 360 2 1020 357,5 32 28 3 140 86
360 400 2 1140 385 34 30 3 140 93
400 450 2 1290 385 36 32 3 140 100
450 500 2 1440 412,5 38 34 3 140 108
500 550 2 1590 412,5 40 34 4 160 113
550 600 2 1740 440 42 36 4 160 118
600 660 2 1920 440 44 38 4 160 123
660 720 2 2100 440 46 40 4 160 128
Not:
- tip 1 = lan din oel categoria 1;
- tip 2 = lan din oel categoria 2;
* poate fi utilizat lan sau cablu din oel; n acest caz, fora de rupere
a cablului sau a lanului este minim 44kN.
214
Viteza de virare a lanului de ancor se msoar pe lungimea a dou chei de lan
ncepnd din momentul n care trei chei de lan sunt complet scufundate n ap.
La apropierea ancorei de nav, viteza de virare a lanului trebuie s fie cel mult
de 10m/min. Se recomand ca viteza de intrare a ancorei n nav s fie 7m/min.
Pentru desprinderea ancorei de fund, mecanismul de acionare al instalaiei
trebuie s asigure timp de 2 minute crearea n lan, pe o barbotin a unei ancore, a forei
de traciune de cel puin 1,5 F
1
.
Mecanismul de ancorare trebuie s aib un dispozitiv de frnare corespunztor
unei fore n lan la barbotin de cel puin 1,3 F
1
sau 1,3 F
2
.
Barbotinele trebuie s aib cel puin 5 locauri pentru zale. La barbotinele
vinciurilor unghiul de nfurare a lanului trebuie s fie de cel puin 115, iar la barbotinele
cabestanelor de cel puin 150.
Dac sistemul de acionare poate dezvolta un moment ce creaz o for n lan
mai mare de 0,5 din sarcina de prob a lanului de ancor, trebuie s se prevad o
protecie la depirea sarcinii artate, montat ntre sistemul de acionare i mecanism.
Dac se prevede comanda de la distan a operaiei de filare a lanului de ancor,
atunci cnd mecanismul este decuplat de barbotin, trebuie s se prevad un dispozitiv
care s asigure frnarea automat a frnei band, astfel nct viteza maxim de filare a
lanului s nu depeasc 180m/min, iar viteza minim s nu fie mai mic de 80m/min.
Frnarea barbotinei mecanismului de ancorare trebuie s asigure oprirea lanului
de ancor n cazul filrii line n cel mult 5 secunde i cel puin 2 secunde din momentul
apariiei comenzii de frnare.
La postul de comand de la distan trebuie s se prevad un contor al lungimii
lanului de ancor filat i un indicator de vitez a filrii lanului cu marcarea vitezei limit
admisibil de 180m/min.
Mecanismele i prile componente pentru care se prevede comanda de la distan
trebuie s aib o comand local manual.
Mecanismele de ancorare destinate i pentru ndeplinirea operaiilor de manevr,
trebuie s satisfac i cerinele pentru vinciuri i cabestane de manevr.
5.2.2 Instalaia de legare
Fiecare nav trebuie s aib o instalaie de legare, care s asigure apropierea
navei de instalaiile de legare de la uscat sau plutitoare i legarea sigur a acestora ntre
ele.
Numrul, lungimea i fora total de rupere a parmelor de legare, pentru toate
navele cu excepia navelor de pescuit, se determin dup tabelul 5.1., iar pentru navele de
pescuit dup tabelul 5.2, n funcie de caracteristica de dotare a navei. Parmele de legare
pot fi din oel, vegetale sau din fibre sintetice. Parmele vegetale i din fibre sintetice nu
trebuie s aib diametrul mai mic de 20mm, indiferent de fora de rupere prevzut n
tabelele 5.1 sau 5.2.
Numrul i amplasarea babalelor de legare, a urechilor de ghidaj i a altui
echipament de legare se stabilete n funcie de specificul, de destinaia i de planul
general al navei.
Pentru virarea parmelor de legare pot fi utilizate att mecanismele de manevr
special instalate n acest scop (cabestane de manevr, vinciuri de manevr), ct i alte
mecanisme de punte (vinciul de ancor, vinciul de ncrcare) avnd tambur de manevr.
215
Alegerea numrului i tipului mecanismelor de manevr se face la aprecierea
armatorului i proiectantului. Pentru calculul cabestanului sau vinciului de manevr se va
avea n vedere ca fora nominal de traciune a acestora s nu depeasc 1/3 din fora
total de rupere a parmelor de legare:
(5.5)
n care F
r
este fora total de rupere dat n tabelele 5.1 i 5.2.
Acionarea mecanismului de manevr trebuie s asigure virarea fr ntrerupere a
parmei de manevr la efortul nominal de traciune, cu viteza nominal, timp de cel puin
30 minute.
Viteza de virare a parmei de manevr, la primul strat de nfurare a parmei pe
tambur, la efortul nominal de traciune trebuie s fie minimum:
0,25m/s la o for de traciune mai mic de 80kN;
0,20m/s la o for de traciune de 81 160kN;
0,16m/s la o for de traciune de 161 250kN;
0,13m/s la o for de traciune mai mare de 250kN.
Viteza de virare a parmei cu ajutorul tamburului de manevr, la efortul nominal
de traciune, nu trebuie s fie mai mare de 0,3m/s.
Sistemul de acionare al mecanismului de manevr n regim nominal de
funcionare trebuie s asigure timp de 2 minute obinerea n cablu, n primul strat de
nfurare pe tambur, a unei fore de traciune cel puin egal cu 1,5 ori fora nominal
(1,5F).
Dac momentul maxim al sistemului de acionare poate solicita elementele
dispozitivelor de manevr la fore mai mari dect cele admise, mecanismele de manevr
trebuie s fie prevzute cu un sistem de protecie la suprasarcin.
Mecanismele de manevr trebuie s aib o frn automat care s rein cablul de
manevr solicitat la o for de traciune de cel puin 1,5 ori fora nominal de traciune, n
cazul dispariiei energiei de acionare sau la defectarea sistemului de acionare.
Vinciurile de manevr cu funcionare automat trebuie s aib o comand
manual care s asigure posibilitatea de lucru i n regim neautomat.
n cazul vinciurilor cu funcionare automat trebuie s se prevad:
o semnalizare preventiv sonor, care s anune desfurarea lungimii
maxime admisibile a cablului;
un indicator al mrimii forei de traciune n cablu.
5.2.3 Instalaia de remorcare
Fiecare nav trebuie s aib o instalaie de remorcare. Lungimea i fora total de
rupere a parmei de remorc se determin din tabelul 5.1, n funcie de caracteristica de
dotare a navei.
Navele n al cror simbol de clas se adaug meniunea remorcher sunt dotate
cu instalaii speciale de remorcare din care fac parte vinciurile de remorc.
Fora total de rupere a fiecrei parme de remorc trebuie s fie cel puin de trei
ori fora nominal de traciune (F
r
= 3F), iar lungimea de cel puin 150m.
r
F F
3
1
216
Dotarea remorcherelor cu parme se face n funcie de traciunea nominal la
crlig, determinat prin calcule. Dac aceste calcule nu se efectueaz, atunci traciunea
nominal F va fi cel puin de:
[ ] kN Pe c 133 , 0 F
n care:
Pe - puterea total la conul elicei [kW];
c = 1,25 pentru remorchere cu elice obinuit;
c = 1,40 pentru remorchere cu propulsor Voith-Scheider;
c = 1,60 pentru remorchere cu elice cu pas reglabil;
c = 1,80 pentru remorchere cu elice obinuit i ajutaje;
c = 2,10 pentru remorchere cu elice cu pas reglabil i ajutaje.
Pentru vinciul de remorc trebuie s se asigure posibilitatea deservirii de la locul
vinciului; se recomand s se prevad posibilitatea comenzii vinciului de remorc i din
timonerie.
Cnd se utilizeaz dispozitive automate pentru reglarea ntinderii cablului de
remorc, trebuie s se asigure posibilitatea de control a mrimii efortului de traciune care
acioneaz la un moment dat.
Se va prevedea o semnalizare acustic preventiv, care s intre n funciune la
atingerea lungimii maxime admisibile a cablului filat.
Vinciul de remorc trebuie s aib un dispozitiv de frnare automat care s
menin cablul supus unui efort de traciune de cel puin 1,25 sarcina nominal, n cazul
dispariiei sau a decuplrii energiei de acionare a vinciului.
5.3 Tipuri i parametri de baz ai mecanismelor de ancorare i legare
grupa nti corespunde mecanismelor cu vitez normal (vinciuri,
cabestane de ancor i legare, macarale pentru ancorare i legare);
grupa a doua corespunde mecanismelor cu vitez mare (cabestane de ancor
i legare);
grupa a treia corespunde mecanismelor cu vitez redus (vinciuri, cabestane
de ancor i legare, macarale pentru ancor i legare).
n tabelul 5.6 se prezint parametrii de baz pentru mecanismele de ancorare-
legare destinate navelor de suprafa i care pot avea comand local, de la distan sau
automat, iar n tabelul 5.7 se prezint parametrii de baz pentru cabestanele de manevr
destinate pentru lucru n regim de traciune cu tensiune constant n parm.
(5.6)
217
Tabelul 5.6.
Model
Adncimea
de calcul
pt. anco-
rare [m]
Calibrul lanului, d
[mm]
Viteza de ridicare a
lanului
[m/min]
Fora
nominal
de
traciune
la
cabestan
[N]
Viteza de tragere a
parmelor de manevr
[m/min]
obinuit
de
rezisten
ridicat
normal
nu mai
mic
normal
mic
mare
Mecanisme din grupa nti
1 65 15/17 - 5000 nu nu
2 80 19/22 - 10000 se se
3 80 25/28 - 15000 fixeaz fixeaz
4 100 31/34 - 20000
5 100 37/40 - 30000
6 100 43/46 37/40 10 10 50000
7 100 49/53 43/46 65000 18 9 24-10
8 100 57/62 49/53 80000
9 100 67/72 57/62 100000
10 100 77/82 67/72 140000
11 100 87 77/82 140000
12 100 92/100 87/92 - - - -
1 2 3 4 5 6 7 8 9 10
Mecanisme din grupa a doua
1 65 15/17 - 10 10 5000 18 nu nu
2 80 19/22 - 10 10 10000 18 se se
3 80 25/28 - 10 10 15000 18 fixeaz fixeaz
4 100 31/34 - 24 10 30000 18 24-40
5 100 37/40 - 24 10 50000 18 9 24-40
6 100 43/46 37/40 24 10 65000 18 9 24-40
7 100 49/53 43/46 24 10 80000 18 9 24-40
8 100 57/62 49/53 24 10 100000 18 9 24-40
9 100 67/72 57/62 24 10 125000 18 9 24-40
10 100 77/82 67/72 24 10 125000 18 9 24-40
Mecanisme din grupa a treia
1 15/17 13/15 6000
2 40 19/22/25 22/25/28 7 7 12500 8 - -
3 28/31/34 31 20000
218
Tabelul 5.7
Model
cabestan
Fora
nominal de
traciune la
cabestan [N]
Viteza de tragere a parmelor
de manevr [m/min]
Dimensiunile de calcul pentru
parme de manevr
mic nominal mare Diametrul
pt. oel [mm]
Circumferina [mm]
vegetale sintetice
1 5000 - 15-18 - 13,5 100 60
2 10000 - 15-18 - 15 125 75
3 20000 - 15-18 - 19 175 90
4 30000 - 12-16 24-25 22,5 200 110
5 50000 - 12-16 24-25 24,5; 30 225 150
6 80000 - 12-16 24-25 30; 33,5 300 175
7 100000 - 11-14 24-25 33,5; 41 350 200
Clasificarea mecanismelor de ancorare i de manevr prezentat n tabelele 5.6 i
5.7. corespunde standardelor ruseti (GOST 5875-77 i GOST 9891-76) i poate fi util
pentru alegerea vitezelor de virare a lanului de ancor precum i de strngere a parmelor
de legare.
Pentru cabestanele i vinciurile de ancorare-legare fora de traciune specific
(presiunea) la barbotin are valorile prezentate n tabelul 5.8.
Tabelul 5.8
Grupa
mecanismului
Model
mecanism
Fora de traciune specific la
barbotin pentru tragerea lanului
de ancor
k
M
cu vitez
nominal, a [MPa]
cu vitez mic,
a [MPa]
pentru
lanuri
obinuite
pentru
lanuri cu
rezisten
ridicat
Prima 1-3 30 16 1,3 1,0 1,15
4-12 38 16 1,3
1-3 30 16 1,6
a doua 4-6 35 20 1,6 1,0 1,15
7-10 40 25 1,6
a treia 1-3 23 16 2,0 zale de lan
fr punte
0,8
zale de lan
cu punte
1,0
5.4 Acionarea electric a mecanismelor de ancorare - acostare
Din analiza regimurilor de lucru i a diagramelor de sarcin (fig. 5.11) rezult
urmtoarele cerine pentru acionarea electric a mecanismelor de ancorare:
funcionare pe punte n orice condiii de anotimp sau stare a mrii;
funcionare sigur la oscilaii ale tensiunii reelei de alimentare n limitele
admise de norme;
posibilitatea pornirii n sarcin nominal;
219
meninerea forei necesare de traciune la viteze mici de ridicare a lanului
aezat liber pe fund sau la tragerea parmelor de legare i posibilitatea staionrii sub
curent o anumit durat;
fora maxim de traciune dezvoltat de motor electric de execuie s fie
mai mic, n limitele prescrise, n raport cu rezistena la rupere a lanului de ancor sau a
parmei de manevr;
s permit obinerea vitezei nominale de ridicare a ancorei dup smulgerea
de pe fund i vitez redus la tragerea ancorei n nar;
s aib posibilitatea meninerii greutii ancorei i a lanului n cazul
ntreruperii tensiunii de alimentare a motorului electric;
s asigure fundarisirea ancorei la adncimea dat, fr pericol;
masa, gabaritele i preul de cost s fie minime;
simplitate n deservire i siguran n exploatare.
Acionrile electrice ale mecanismelor de ancorare i de manevr, atunci cnd se
utilizeaz motoare asincrone cu rotorul n scurtcircuit, dup o funcionare de 30 minute la
sarcina nominal, trebuie s asigure posibilitatea de funcionare cu rotorul calat
motorului electric la tensiunea nominal timp de cel puin 30 secunde pentru
mecanismele de ancorare i 15 secunde pentru mecanismele de manevr.
Pentru motoarele electrice cu numr comutabil de poli, aceast cerin este
valabil pentru funcionarea motoarelor electrice cu nfurarea care d cel mai mare
cuplu de pornire.
Dup regimul de staionare sub curent creterea temperaturii nu trebuie s fie mai
mare de 130% fa de cea admisibil pentru izolaia folosit. La vinciurile i cabestanele
de ancor, de manevr i acostare, pe treptele destinate pentru manevr, trebuie s se
prevad o protecie corespunztoare la suprasarcin a motoarelor electrice.
Vinciul sau cabestanul de ancor intr n categoria instalaiilor eseniale de la
bordul navei i ca urmare se alimenteaz direct de la tabloul principal de distribuie prin
circuit separat.
Acestor cerine le corespund motoarele electrice cu caracteristica de tip moale
avnd cuplul electromagnetic M, variabil n limite mari cu turaia n i care asigur pentru
diferite regimuri de lucru meninerea aproximativ constant a puterii. Acest aspect este
foarte important avnd n vedere c acionarea electric a mecanismului de ancorare
necesit o putere mare i centrala electric de bord are o putere limitat.
Motoarele electrice folosite pentru acionarea electric a mecanismelor de
ancorare, legare i remorcare sunt construite special n acest scop, avnd n vedere
condiiile deosebite n care lucreaz.
Din punct de vedere al caracteristicilor mecanice, ) M ( f n , cel mai bine
corespunde motorul electric de curent continuu cu excitaie serie sau mixt.
Datorit calitilor sale deosebite n ceea ce privete caracteristicile mecanice,
motorul de curent continuu se folosete pe nave moderne electrificate n curent alternativ
n situaia cnd instalaia de ancorare are putere foarte mare. n astfel de cazuri motorul
de curent continuu este alimentat de la surse separate, cum ar fi: grupul generator-motor
sau redresoare comandate cu tiristoare.
220
Datorit faptului c motoarele asincrone cu rotor n scurtcircuit sunt cele mai
simple, sigure i robuste, navele actuale (electrificate n curent alternativ) le folosesc
aproape n exclusivitate pentru mecanismele de ancorare - acostare.
Aceste motoare sunt prevzute n stator cu dou nfurri distincte, prima de tip
Dahlander cu ajutorul careia, prin trecerea de la conexiunea triunghi la dubl stea se obin
primele dou trepte de vitez i cea de-a doua separat n conexiune stea cu ajutorul
creia se obine treapta a treia de vitez utilizat pentru recuperarea parmelor libere.
Virarea ancorei se face pe treapta a doua de vitez, de baz (dubl stea) pe care puterea i
cuplul motorului sunt maxime.
Acionrile electrice uzuale sunt cele cu motoare asincrone cu rotor n scurtcircuit
cu mai multe trepte de vitez.
Astfel de motoare se folosesc n prezent pentru puteri pn la 85kW i au de
regul trei viteze corespunztoare numrului de poli 2p = 4/8/16. Viteza medie, 2p = 8,
corespunde caracteristicii mecanice naturale i realizeaz nvingerea cuplurilor de sarcin
mari pe timpul tragerii navei pe lan i smulgerii ancorei sau pentru tragerea parmelor de
legare cnd sarcina are valori mari. Viteza mic, 2p = 16, este utilizat, de regul, pentru
tragerea ancorei n nar.
Pentru puteri mici ale instalaiei de ancorare sau manevr se folosesc i motoare
asincrone n scurtcircuit cu dou viteze. De regul, se recomand s se foloseasc
motoare asincrone cu rotorul n scurtcircuit cu 2 viteze, pentru puteri ale instalaiei n
limitele 2 - 10kW i motoare asincrone cu rotor n scurtcircuit cu trei viteze pentru puteri
n limitele 10 - 60kW i n unele cazuri pn la 85kW.
n Anexele 1 sunt date caracteristicile tehnice ale motoarelor asincrone trifazate
cu rotorul n scurtcircuit cu dubl sau tripl comutaie de poli, cu frn electromagnetic,
destinate acionrii instalaiilor navale de ancorare i legare din seria ASFN realizat n
economia naional i seria MA.
Cerinele regimurilor de funcionare i diagramei de sarcin pentru instalaiile de
ancorare i legare sunt ndeplinite n cea mai mare msur de sistemul de acionare cu
grup generator-motor.
Sistemul generator-motor este simplu, sigur n exploatare i necesit o cantitate
minim de aparataj electric. Dezavantajul lui const n faptul c se mrete mult puterea
instalat, fiind necesare trei maini electrice pentru acionarea mecanismului.
Utilizarea lui se justific pentru puteri mari, peste 70kW, cnd n schemele de
comand cu contactoare i relee crete mult cantitatea de aparataj electric i, ca urmare,
cresc preul de cost i nesigurana n funcionare.
n sistemul generator-motor, generatorul de curent continuu este cu excitaia
anticompound, iar motorul de execuie, motor de curent continuu cu excitaie
independent.
221
5.5 Alegerea i verificarea motorului electric de acionare a mecanismelor de
ancorare- acostare. Exemplu de calcul.
5.5.1 Forele care acioneaz n lanul de ancor pe timpul staionrii navei la
ancor
n timpul staionrii navei la ancor, asupra ei acioneaz fore exterioare ca: fora
vntului i a curentului, a cror rezultant este pe o direcie orizontal. Nava st la ancor
nemicat atunci cnd rezultanta forelor exterioare aplicat navei este echilibrat de
forele interioare, datorate greutii lanului i ancorei.
Lanul de ancor fiind suficient de flexibil ia forma lniorului, figura 5.6 fixat n
dou puncte, O i O
1
.
Greutatea lanului liber suspendat,
1
G
r
, se descompune n dou fore de traciune
1
T
r
i
2
T
r
aplicate n punctele O i O
1
. Echilibrul forelor este prezentat de triunghiul forelor
construit n punctul O
1
.
Fig. 5.6 Forele de traciune n lanul de ancor
l - lungimea liber suspendat; H - adncimea; b - nlimea navei deasupra apei
Forele de traciune la capetele lanului,
1
T
r
i
2
T
r
sunt orientate dup tangentele la
curba lniorului. n punctul O
1
rezultanta forelor
1
T
r
i
2
T
r
este egal cu fora greutii
lanului,
1
G
r
.
Aciunea forelor
1
T
r
i
2
T
r
este echilibrat de forele de reaciune n lan,
'
2
'
1
T i T
r r
egale i de sensuri contrare.
222
Atunci cnd curba lniorului, l, se afl n echilibru, suma algebric a proieciilor
acestor fore pe axa orizontal este nul, astfel:
0 cos T cos T
2 2 1 1
+
Relaia (13.7) este valabil pentru oricare lungime l aflat n echilibru i se poate
scrie:
i i 2 2 1 1
cos T cos T cos T
Adic, componenta orizontal a forei de traciune n lan este constant n orice
punct al lanului.
Pentru staionarea fr pericol a navei la ancor este necesar ca asupra inelului
ancorei s nu acioneze niciun fel de for care s tind s o desprind de pe fund. Aceast
cerin este ndeplinit dac 0
1
i deci componenta vertical OA a forei
1
T
r
este nul
i se realizeaz n mod practic prin filarea unei lungimi suficiente de lan, astfel nct o
parte din acesta s se afle pe sol.
n figura 5.7 sunt reprezentate forele care acioneaz n lan n situaia n care o
parte din acesta, l
1
, se afl pe sol.
Fig. 5.7 Forele n lanul de ancor cnd poriunea de lan l
1
st liber pe sol
n acest caz, fora de traciune n lan la inelul ancorei va fi:
0 pentru T cos T
1 0 1 1
i ca urmare:
0 i i
T cos T
n acest fel, n orice punct al lanului de ancor componenta orizontal este egal
cu fora de reinere a ancorei.
(5.7)
(5.8)
(5.9)
(5.10)
223
Pentru calculul instalaiei de ancorare este necesar s se determine aciunea
forelor exterioare care acioneaz asupra navei pe timpul staionrii la ancor: fora
vntului, F
v
, i fora curentului, F
c
a cror rezultant este fora perturbatoare F
p
:
p ext v c
F F F F +
Pentru staionarea sigur a navei la ancor aciunea forelor exterioare trebuie s
fie echilibrat de fora de reinere a ancorei.
2
'
2 0 ext
cos T T F
Fora de rezisten a apei depinde n principal de fora curentului asupra prii
imersate a navei (suprafaa udat) i poate fi determinat cu urmtoarea expresie:
( ) [ ] N
2
v
A k F
2
ud f f k c
+
unde:
4 2 3
m Ns 10 025 , 1 - densitatea apei de mare;
3 3
f
10 14 , 1 10 84 , 3
- coeficient de frecare al apei;
k
k
- coeficient de corecie pentru influena curburii corpului;
3 3
f
10 2 , 1 10 7 , 0
- majorarea coeficientului de frecare datorit
asperitilor corpului navei; valorile inferioare se
adopt pentru bordaje sudate, iar valorile
superioare pentru bordaje cu asperiti pronunate;
t c
v v v +
n care:
s m 3 , 0 1 , 0 v
t
- viteza navei la tragerea lanului;
s m 3 1 v
c
- viteza curentului apei.
Pentru determinarea suprafeei udate a navei se utilizeaz formula:
( )[ ]
2
ud
m T 7 , 1 B L A +
n care L, B, T sunt dimensiunile navei, iar 85 , 0 75 , 0 un coeficient care ine seama
de forma corpului navei.
n tabelul 5.3 sunt date valorile coeficientului k
k
n funcie de raportul dintre
lungimea i limea navei.
(5.11)
(5.12)
(5.13)
(5.14)
224
Tabelul 5.3
L/B 6,0 8,0 10 12
k
k
1,04 1,03 1,02 1,01
Viteza curentului apei este dependent de zona de navigaie aa cum rezult din
tabelul 5.4.
Tabelul 5.4
Oceane, mri i strmtori Viteza curentului n Nd
Oceanul Atlantic 1,0
Marea Baltic 4,0
Bosfor 3,0
Oceanul Indian 2,08
Marea Caspic 0,78
Marea Roie 1,7
Marea Nordului i strmtori 7,0
Strmtoarea Gibraltar 4,0
Oceanul Pacific 1,0
Marea Neagr 0,7
Marea Japoniei 3,5
Not: 1Nd = 0,514m/s
Pentru nava cu raion nelimitat de navigaie se ia n calcul valoarea maxim a
curenilor. De regul, se alege pentru calcule viteza curentului pn la 5Nd, avnd n
vedere c n situaii mai grele, pentru ridicarea ancorei lucreaz i elicea navei.
Fora de rezisten a vntului se determin cu formula:
[ ] N v A k F
2
v v v
unde:
1
]
1
4
2
v
m
s N
61 , 0 24 , 0 k - coeficient de presiune al vntului;
A - suprafaa velic n m
2
;
v
v
- viteza vntului n m/s.
Valorile pentru fora i viteza vntului ntlnite pe mri i oceane sunt date n
tabelul 5.5.
(5.15)
225
Tabelul 5.5
Grade
Beaufort
Viteza
vntului
[m/s]
Caracterul
vntului
Grade
Beaufort
Viteza vntului
[m/s]
Caracterul
vntului
0 0 - 0,2 calm 7 13,9 - 17,1 puternic
1 0,3 - 1,5 linitit 8 17,2 - 20,7 foarte puternic
2 1,6 - 3,3 uor 9 20,8 - 24,4 furtun
3 3,4 - 5,4 slab 10 24,5 - 28,4 furtun intens
4 5,5 - 7,9 moderat 11 28,5 - 32,6 furtun violent
5 8,0 - 10,7 adiere 12 peste 32,7 uragan
6 10,8 - 13,8 intens
Viteza vntului pentru condiii normale de ridicare a ancorei se consider:
( ) Beaufort grade 6 3 s m 12 4 v
v
n situaia n care ridicarea ancorei se face cnd fora vntului depete 12m/s
(gradul 6) este necesar s lucreze i elicea navei pentru a uura deplasarea ctre locul de
fundarisire a ancorei.
n urma rezolvrii ecuaiei curbei lniorului (fig. 5.6), se obin pentru valorile
forelor T
1
i T
2
urmtoarele expresii:
( )
( )
l H b
T T q
H b
2
2
1 0
2
+
+
( )
( )
l H b
T q
H b
2
2
2
2
+ +
+
n care q este greuatea n aer a lanului de ancor pentru un metru liniar.
Greutatea pe metru liniar pentru un lan de calibru d(mm) se poate calcula cu
relaia:
[ ] [ ] N d 215 , 0 8 , 9 kgf d 0215 , 0 q
2 2
atunci cnd nu se cunoate din datele tehnice ale lanului de ancor.
De asemenea, ntre greutatea ancorei i greutatea lanului pe metru liniar exist
relaia de aproximare:
G , q 46 6
(5.16)
(5.17)
(5.18)
(5.19)
(5.20)
226
Din expresia (5.17) se observ c fora T T
1 0
care echilibreaz forele
exterioare,
ext
F , i menine nava la ancor, este direct proporional cu greutatea lanului
pe unitatea de lungime, G. Pentru lanurile de ancor aceast mas este de 5 - 6 ori mai
mare dect pentru cablurile de oel cu aceeai rezisten mecanic. De aceea, pentru
instalaiile de ancorare se ntrebuineaz exclusiv lanuri de ancor.
A doua expresie (5.18), exprim valoarea forei cu care trebuie s se acioneze n
prima etap pentru ridicarea ancorei.
Dup calcularea forei exterioare rezultante, F
ext
i din condiia de staionare
sigur la ancor,
0 1 ext
T T F , nlocuind T
1
cu F
ext
n relaia (5.17.) se determin
lungimea l a lanului de ancor liber suspendat pentru adncimea de ancorare H:
ext
HF
l H
q
2
2
La obinerea expresiei (5.21) s-a neglijat nlimea navei deasupra apei, b, care
are valoare mic n comparaie cu adncimea de ancorare H.
Pentru adncimea de ancorare, H, practica maritim recomand urmtoarea
relaie dintre lungimea total a lanului de ancor, L, i adncimea de ancorare.
( ) L H 2 4
Astfel, pentru lanuri cu lungimea n limitele m 340 120 L rezult c
adncimea de ancorare de calcul este H m 40 100 . Calculele executate sunt
acoperitoare ntruct n practic adncimea de ancorare nu depete 50m i n situaiile
cele mai frecvente este de 15 30 m.
Dac L este lungimea total a lanului de ancor, rezult c partea care se aeaz
liber pe fund este:
l L l
1
5.5.2 Forele care acioneaz n lanul de ancor, la barbotin pe timpul ridicrii
ancorei
n figura 5.8 sunt prezentate poziiile succesive ale navei i lanului de ancor pe
timpul ridicrii ancorei.
Pentru ridicarea ancorei, n mod normal se execut urmtoarele operaiuni:
1. Tragerea navei pe lan cu for de traciune constant
Pe durata acestei operaiuni cabestanul (vinciul) trage lanul de ancor cu o for
de traciune constant pn la ridicarea ultimei verigi aezat liber pe fund. Nava se
deplaseaz spre locul de fundarisire a ancorei, iar forma lniorului rmne neschimbat.
Fora de traciune n lan la barbotin este dat de expresia (5.18). Neglijnd valoarea b n
comparaie cu H i innd seama de frecrile n nar se obine expresia forei n lan la
barbotin pentru prima etap:
(5.21)
(5.22)
(5.23)
227
(5.24)
n care 8 , 0 7 , 0
nar
reprezint randamentul narei de ancor.
La sfritul operaiunii lanul ocup poziia 0 0
1
'
(fig. 5.8.).
2. Aducerea navei deasupra ancorei
Nava continu s fie tras spre locul de fundarisire a ancorei. Forma lniorului
se schimb continuu i odat cu aceasta fora de traciune n lan crete continuu, iar
motorul electric este solicitat s dezvolte cupluri din ce n ce mai mari. La sfritul acestei
etape lanul ocup poziia 0 0
1
''
.
Fora de traciune crete liniar fa de fora constant din prima etap, ajungnd pn la
valoarea de smulgere a ancorei
3. Smulgerea ancorei de pe fund
Fora necesar smulgerii ancorei de pe fund nu poate fi determinat teoretic,
ntruct ea depinde de mai muli factori care nu pot fi introdui n calcule. Fora necesar
smulgerii ancorei de pe fundul apei
sm
F se calculeaz cu formula empiric:
( )
sm a
F k G qH +
n care
a
k ( ) 3 4
este coeficientul forei de inere al ancorei.
q[N/m] - greutatea liniar a unui metru de lan n aer;
H[m] - adncimea n locul de staionare;
G[N] - greutatea ancorei n aer;
Fig. 5.8 Poziiile succesive ale navei i lanului de ancor la ridicarea ancorei
(5.25)
I
n a r
l H
T q
H
2 2
2
+
228
La aceast alegere s-a avut n vedere faptul c n general desprinderea ancorei se
face cu ajutorul ineriei navei sau n cazuri deosebite, operaiunea este ajutat de micarea
elicei.
Din cele prezentate rezult c fora total de traciune n lan, n momentul
desprinderii, pe care trebuie s o dezvolte motorul electric este:
( )
a sm
II
nar nar
k G qH F
T
+
n care:
87 , 0
7800
1025 7800
oel
ap oel
reprezint coeficientul de reducere a greutii n apa de mare.
4. Ridicarea ancorei suspendat liber
Imediat dup smulgere, fora de traciune n lan la barbotin va fi:
( )
III
nar
T G q H
1
+
Pe timpul acestei etape fora de traciune scade continuu pe msur ce se vireaz
lanul de ancor la bord, fiind egal la sfritul operaiunii cu greutatea ancorei ajuns la
suprafaa apei:
IV
nar
T G
1
5. Tragerea ancorei n nar
Pe msur ce ancora intr n nar fora de traciune crete ca urmare a mririi
coeficientului de frecare, fiind ctre sfritul operaiunii egal cu ( )
IV
T 25 , 1 2 , 1 .
n figura 5.9 este reprezentat variaia forei de traciune n lan la barbotin n
funcie de lungimea lanului n cazul ridicrii ancorei de la adncimea normal de
ancorare.
(5.26)
(5.27)
(5.28)
(5.29)
229
Fig. 5.9. Graficul ( )
i
l f T n regim normal
n afara regimului normal de ridicare a ancorei examinat mai sus, mai exist i un
aa zis regim de avarie, adic regimul n care filarea ancorei a fost efectuat la o
adncime care depete lungimea total a lanului de ancor. Cu toate c n acest regim
lipsete operaiunea de smulgere a ancorei, el poate reprezenta, n cazul n care lanul de
ancor este foarte lung, o solicitare mai mare a motorului electric n comparaie cu
regimul normal.Valoarea forei de traciune n lan la barbotin la nceputul regimului de
avarie este:
( )
in
nar
T G L q
1
+
iar la sfritul regimului este:
fin IV
T T (5.31)
Graficul ( )
i
l f T pentru regimul de avarie este prezentat n figura 5.10.
Motorului electric de acionare i se cere s fac fa ambelor regimuri posibile.
Forele care acioneaz n mecanism la coborrea ancorei nu influeneaz
alegerea motorului electric. Ancora se las de obicei sub aciunea propriei greuti i a
lanului. Iniial motor electric poate fi pornit n sens de filare a lanului pentru a ajuta la
eliberarea mecanismului, dup care se deconecteaz axul de conducere a cabestanului i
coborrea ancorei se execut cu frnare mecanic.
(5.30)
230
Fig. 5.10 Graficul ( )
i
l f T n regim de avarie
5.5.3 Alegerea motorului electric de acionare a mecanismului de ancorare- acostare
Din datele tehnice ale navei pentru care se calculeaz instalaiile de ancorare,
legare i remorcare se determin caracteristica de dotare a navei, Na, folosind relaia
(5.1).
Cunoscnd caracteristica de dotare, din tabelele 5.1 sau 5.2 rezult: numrul
ancorelor principale, masa fiecrei ancore, lungimea total a lanului de ancor, calibrul
lanului, lungimea parmei de remorc i fora de rupere, numrul parmelor de legare i
fora de rupere.
n continuare, se prezint etapele de calcul pentru mecanismele de ancorare
acostare
1. Se determin cuplul nominal de calcul:
[ ] m N
MAX s
c
M
M ,
n care = 1.5 2 este coeficientul de suprasarcin, iar M
SMAX
este cuplul de sarcin
maxim.
Solicitarea maxim a motorului poate s apar n urmtoarele situaii:
a) la smulgerea ancorei de pe fundul apei n care caz M
SMAX
= M
SM
= M
III
; cuplul
necesar smulgerii ancorei de pe fundul apei calculndu-se cu relaia:
[ ] m N
i
R F
M
n mec
b sm
sMAX
:
n care:
R
b
[m] - raza barbotinei;
mec
=(0,420,82)- randamentul transmisiei mecanice;
Valorile inferioare corespund mecanismelor cu melc - roat melcat cu
autofrnare iar cele superioare pentru transmisii cu roi dinate cilindrice, fr
autofrnare;
n
=(0,650,75) - randamentul narei de ancor;
i = 100200 - raportul de transmisie al vinciului de ancor; valoarea se alege din
considerente de alegere optim a turaiei motorului electric;
(5.32)
(5.33)
231
F
sm
- fora necesar smulgerii ancorei de pe fundul apei, care se calculeaz cu
formula empiric 5.25;
Barbotinele au de regul pe circumferin cinci locauri pentru lan, iar pasul lanului sau
lungimea unei velici este de 8d. De aici rezult c diametrul barbotinei este:
b
D , d 13 7 (5.34)
n care d este calibrul lanului.
b) la virarea (ridicarea) ancorei de la o adncime egal cu lungimea total a
lanului, n care caz:
( )
[ ]
b
SMAX L
mec n
G q L R
M M
i
N m
+
;
unde L[m] este lungimea total a lanului de ancor;
c) la ridicarea simultan a dou ancore suspendate liber, de la jumtatea
adncimii convenionale a apei, n care caz:
( )
[ ]
b
SMAX
mec n
G q H R
M
i
2
N m
+
.
2. Se determin turaia nominal de calcul:
n
c
= n
med
[rot/min]
n care: [ ] min 6 , 9 rot
R
V i
n
b
med l
med
lmed
V [m/min] - vitez medie impus de virare a ancorei
Viteza de ridicare a lanului de ancor se alege avnd n vedere cerinele
societilor de clasificare i parametrii mecanismelor de ancorare - acostare prezentai n
tabelul 5.6.
n relaia 5.37:
=1-s
n
(5.39)
s
n
- valoarea estimat a alunecrii nominale dup catalogul din care se alege
motorul electric.
3. Se determin puterea nominal de calcul:
[ ] kW
9550
c c
c
n M
P
4. Se alege din catalogul de motoare destinate funcionrii n serviciu de scurt
durat S2 pentru durata de funcionare ta=30 min., motorul ai crui
parametri nominali satisfac relaiile:
P
N
P
C
i n
N
n
C
i se determin caracteristicile mecanice corespunztoare celor 3 trepte de vitez.
5. Se verific dac cuplul maxim al motorului ales, la turaia mic n cazul
motorului cu trei trepte de vitez, este mai mic dect 1/3 din valoarea la care
lanul de ancor se poate rupe:
mec n
b r
CATALOG MAX
i
R F
M
<
3
(5.35)
(5.36)
(5.37)
(5.38)
(5.40)
(5.41)
(5.42)
232
unde F
r
[N] este fora de rupere a lanului de ancor.
6. Se verific posibilitatea pornirii motorului la turaia medie, cnd ancora este
suspendat la o adncime egal cu lungimea total a lanului:
M
P CATALOG
1,5 M
L
n care M
L
a fost calculat cu relaia (5.35), coeficientul 1,5 innd seama de posibilitatea
micorrii tensiunii de alimentare i creterea frecrilor n acest caz;
7. Calculul forei la barbotin pentru ridicarea lanului de ancor cu vitez
mic:
[ ]
min
F a ' m d N
2
1
n care parametrii a i m se iau din tabelul 5.8.
8 10.
Se determin cuplul M
min calc
, turaia n
mi n neces
i puterea P
min neces
cu relaiile:
min b min min min
min min min
mec b
F R v i M n
M [Nm]; n , [rot / min]; P [Kw]
i R
1
9 6
9550
11. Calculul cuplului la axul motorului electric n perioada de tragere a parmei
de acostare cu fora de tragere nominal:
- pentru parme din oel:
[ ]
c c
c
mec
F D
M Nm
i 2
n care: F
c
[N] fora nominal de traciune determinat conform relaiei (5.5), n funcie
de fora de rupere (tabelul 5.1);
D
c
[m] diametrul cabestanului;
i,
mec
raportul i randamentul transmisiei;
- pentru parme vegetale i sintetice se determin
'
c
M i
' '
c
M .
12. Calculul forei de frnare la barbotin pentru meninerea frnat a axului
motorului electric n cazul dispariiei tensiunii de alimentare:
[ ]
FEcalc
F k F N
1
n care coeficientul k se alege din tabelul 5.8.
13. Cuplul necesar al frnei electromagnetice la axul motorului electric:
[ ]
FE b
FEcalc FEcatal og
mec
F D
M N m M
i 2
5.5.4 Calculul diagramelor de sarcin i verificarea motorului electric ales
Dup alegerea motorului electric de acionare se determin valorile cuplului de
sarcin n fiecare din cele patru etape de virare a ancorei i duratele respective, iar pe baza
lor se construiete diagrama de sarcin M=f(t).
(5.43)
(5.44)
(5.45)
(5.46)
(5.47)
233
Diagramele reprezentate n figurile 5.9 i 5.10 reprezint variaia forei de
traciune n lan la barbotin pentru regimurile normal i de avarie, la ridicarea ancorei.
Momentul de rotaie la barbotin este:
i b
bi
T D
M
2
n care D
b
este diametrul barbotinei.
Cuplul la axul motorului electric se determin cu relaia:
bi
i
mec
M
M [Nm]
i
pentru fiecare din cele patru etape de virare a ancorei.
Pentru a obine diagrama de sarcin la axul motorului electric, ( ) t f M , este
necesar s se determine duratele de funcionare ale motorului electric pe etape, astfel:
1. Tragerea navei pe lan:
I
b
l i
t
D n
1
1
2. Aducerea navei deasupra ancorei:
( )
II
b
H i
t
n n
D
1 2
1
2
3. Smulgerea ancorei. Durata repausului sub curent:
III
t , 0 5 1 minut
4. Ridicarea ancorei:
IV
b
H i
t
n n
D
3 4
2
5. Ridicarea ancorei n regim de avarie:
2
n n
D
i L
t
fin in
b
5
+
Pentru calculul timpilor, turaiile n
1
, n
2
, n
3
, n
4
, n
in
, n
fin
se determin din
caracteristica mecanic a motorului electric i corespund valorilor cuplurilor la axul
motorului electric pentru etapele corespunztoare.
n figura 5.11 este reprezentat diagrama de sarcin a acionrii electrice pentru
mecanismele de ancorare.
(5.48)
(5.49)
(5.50)
(5.51)
(5.52)
(5.53)
(5.54)
234
Mecanismele de ancorare-legare, pentru categoria de nave ntlnite cel mai
frecvent n exploatare, se mpart n 12 modele, n funcie de calibrul lanului i fora de
traciune n parmele de legare i n 3 grupe corespunztoare vitezei de ridicare a lanului
sau tragere a parmelor de legare. Semnificaia grupelor este urmtoarea:
Fig. 5.11 Diagramele de sarcin a acionrii electrice pentru mecanismele de ancorare:
a - regim normal; b - regim de avarie
A. Verificarea motorului ales la nclzire
1. Se calculeaz rezultanta forelor exterioare
ext
F , care acioneaz asupra navei pe
timpul staionrii la ancor folosind relaiile (5.11), (5.13) i (5.15).
2. Se alege adncimea de ancorare din considerentele expuse n paragraful 5.5.1
i folosind relaia (5.22).
3. Se calculeaz lungimea lanului de ancor liber suspendat l, pentru adncimea
de ancorare aleas utiliznd relaia (5.21).
4. Se determin lungimea lanului de ancor aezat liber pe fund l
1
cu relaia
(5.23).
5. Se calculeaz lungimea lanului de ancor ridicat cu for de traciune
variabil:
l
2
= l - H [m]
6. Calculul forelor de traciune n lan la barbotin pentru etapele de ridicare a
ancorei T
I
, T
II
, T
III
, T
IV
, cu relaiile (5.24), (5.26), (5.28) i (5.29).
7. Cuplurile la axul motorului electric pentru etapele de ridicare a ancorei: M
I
,
M
II
, M
III
, M
IV
, determinate pe baza relaiilor (5.48) i (5.49).
8. Turaiile motorului pentru etapele de ridicare a ancorei, n
1
, n
2
, n
3
, n
4
se
determin din caracteristica mecanic a motorului n = f(M) pentru viteza de baz (a II-
a).
9. Timpii pentru etapele de ridicare a lanului de ancor, t
I
, t
II
, t
III
,t
IV
se
calculeaz cu expresiile (5.50), (5.51), (5.52) i (5.53). Durata total a ciclului este:
T = t
I
+ t
II
+c t
III
+ t
IV
(5.55)
(5.56)
235
unde c=0,25 este un coeficient care ine seama de nrutirea condiiilor de
ventilaie n etapa a III-a de virare a ancorei.
10. Se face verificarea la nclzirea motorului ales utilizndu-se metoda cuplului
echivalent. n acest scop, se mparte diagrama de sarcin ntr-o serie de poriuni
elementare i n baza celor artate n paragraful 2.3.2.2, utiliznd relaia (2.46) se poate
scrie (dac se consider M
III
= M
sm
):
IV II
I I I I sm sm sm III IVi IVi IVf IVf
e
I II III IV
t t
M t (M M M M ) M t (M M M M )
M
t t ct t
2 2 2 2 2 2
3 3
+ + + + + + +
+ + +
Cuplul echivalent calculat cu relaia (5.57) trebuie s satisfac condiia:
e N
M M
caz n care motorul ales corespunde i din punct de vedere al nclzirii maxim admise.
Dac una din condiiile de verificare nu este ndeplinit, se alege un alt motor de
putere nominal imediat superioar i se reface calculul descris.
B. Verificarea motorului ales pentru regimul de avarie
11. Se determin lungimea de lan scufundat liber care poate fi ridicat de motor
electric n regimul de avarie:
p
b
M i
L' G
, D q
1
1 2
_
,
n care:
nar mec nar mec
, 0 87
2 2
M
p
- cuplul de pornire al motorului ales.
12. Se determin raportul L/L. Acionarea electric trebuie s asigure ridicarea
ancorei, care atrn de lan i o lungime a lanului de 85% din lungimea lui total. Adic
motorul electric ales satisface regimul de avarie dac L'/L 0,85 (valoare minim
admis).
C. Verificarea motorului ales n vederea asigurrii vitezelor necesare pentru
tragerea parmelor de acostare
13. Cuplul la axul motorului pentru tragerea parmelor de acostare cu vitez
mic:
- pentru parma din oel:
.
M
c min
= 0,75M
c
(5.57)
(5.58)
(5.59)
(5.60)
236
- pentru parme vegetale:
'
c
'
min c
M 75 , 0 M
- pentru parme sintetice:
"
c
"
min c
M 75 , 0 M
14. Cuplul la axul motorului pentru tragerea parmelor de acostare cu vitez mare
(parm fr ncrcare de sarcin):
- pentru parma din oel:
M
c max
= 0,2M
c
i n mod analog se determin
"
max c
'
max c
M , M pentru parme vegetale i sintetice.
15. Din caracteristica mecanic n = f(M) a motorului ales pentru valorile
cuplurilor M
c
, M
c min
, M
c max
se determin turaiile n
c
, n
c min
, n
c max
.
16-18. Viteza nominal de tragere a parmelor din oel:
[ ] min / m
i
n D
v
c c
c
Analog se determin vitezele
"
c
'
c
v , v pentru vitez mic
"
min c
'
min c min c
v , v , v i pentru
vitez mare
"
max c
'
max c max c
v , v , v .
D. Verificarea motorului ales la efortul maxim aplicat n lanul de ancor
19. Fora maxim n lanul de ancor dat de cuplul de pornire al motorului este:
p mec
max
b
M i
F
D
2
Aceast for nu trebuie s depeasc jumtate din fora de prob a lanului.
F
max
0,5F
prob
Dac F
max
depete aceast valoare, atunci pe axul motorului electric se
instaleaz o muf de limitare a cuplului transmis.
EXEMPLU DE CALCUL
Datele iniiale sunt: greutatea ancorei n aer =34,3kN; masa navei
D=1,224 kg; calibrul lanului de ancor d=0.057 m; lungimea lanului de
ancor L=275 m; adncimea n locul de staionare H=110 m; greutatea unui metru
liniar de lan n aer = 0,686 kN/m; raza barbotinei ; suprafaa
velic a navei =115 ; suprafaa operei vii a navei = 3100 ;nlimea
(5.61)
(5.62)
237
puului de lan =8m; viteza vntului = 12,5 m/s; viteza curenilor = 0.5
m/s;raportul de transmisie i= 154; viteza medie de virare a ancorei
= 10m/min; randamentul prii mecanice = 0,77; randamentul narei de
ancor = 0,77; randamentul narei de punte = 0,77; coeficientul de reducere
a greutii n ap =0,87; coeficient ce ine seama de frecarea dintre nav i ap; f
= 1,47 Ns/ ; fora de rupere a lanului = 1180kN; viteza de nfurare a
parmei de manevr = 12 m/min la o for de traciune la tambur = 78,6 kN;
raza tamburului de manevr = 0,43m; randamentul tamburului de manevr
= 0,95; fora de rupere a parmei = 392 kN.
Alegerea puterii motorului electric
Calculul cuplului nominal al motorului.
Pentru determinarea cuplului nominal al motorului este necesar ca la nceput s se
determine cuplul maxim. Plecnd de la condiia smulgerii ancorei de pe fundul
apei se obine:
= = = =0,670 kNm
Din condiia virrii ancorei de la o adncime egal cu lungimea total a lanului,
rezult:
= = =0,770 kNm
Din condiia virrii a dou ancore de la o adancime H=110 m
= = = =0,760 kNm
n acest fel, cuplul de sarcin maxim la axul motorului va fi cel care apare la
virarea ancorei de la o adncime egal cu lungimea total a lanului. Considernd
coeficienul de suprasarcin al motorului =1,9 obinem valoarea de calcul a
cuplului nominal:
= =
Deoarece viteza medie de virare a ancorei este dat, turaia nominal de calcul a
motorului = unde
=0,16 =0,16 =11,2 rot/s
n cazul unui motor asincron cu rotor n scurtcircuit se va considera x= i
=0,10 deci:
=1- =0,9; =11,20,9=10,1 rot/s
Alegerea motorului. Puterea de calcul a motorului necesar pentru alegerea din
catalog este
= = =25,6 kW
238
Se alege , astfel din anexa 1.2, motorul cu rotorul n scurtcircuit ,cu trei trepte de
turaie tip MAI 612-4/8/16 cu urmatoarele date.La treapta de turatie mare: P
n
= 28
kW: =1440 rot/min (24 rot/s);
=4,75; =4,2. La treapta de turaie medie: P
n
= 30 kW;
V; (11,5 rot/s);
La treapta de turaie mic :P
n
= 10 kW;
; ;
=2,3;
Caracteristicile motorului sunt prezentate n fig.1 .Mai nti se verific motorul
ales n ce privete concordana dintre cuplul i turaia sa cu datele de calcul:
405 Nm; rot/s > =10,1 rot/s ,apoi n ceea ce
privete concordana cu cuplul de sarcin care apare la smulgerea ancorei de pe
fundul apei : =1120 Nm > =670 Nm. Fora care corespunde
cuplului maxim dezvoltat de motor la turaia mic este mai mic dect 1/3 din
fora de rupere a lanului:
= =230000 N=230 kN< kN
Fig.1 Caracteristicile motorului MAI 612-4/8/16
Se verific posibilitatea pornirii motorului la turaia medie, cnd ancora
este suspendat la o adancime egal cu lungimea total a lanului:
1078 Nm.n acest fel necesitaea asigurrii pornirii motorului ,n
cazul n care ancora este suspendat la o adncime egal cu lungimea total a
lanului, a determinat alegerea motorului.
n continuare se verific motorul ales la regim de nfurare a parmei de manevr
cu o for de traciune la tambur
Cuplul de rotaie la tambur
239
= = =300 Nm
=
Turaia motorului corespunzatoare acestei fore este
n= =750 =689 rot/min =11,6 rot/s,
unde b=1- = 0,19.
Viteza de nfurare a parmei este:
= =0,205 m/s =12,4 m/min
iar viteza de nfurare dat este de 12 m/min.
Se verific, de asemenea dac motorul satisface i condiia de evitare a
ruperii parmei la funcionarea motorului cu turaia mare
= =242000N =242 kN<392 kN
Ca atare, motorul satisface i aceast condiie.
Se calculeaz diagrama de sarcin i se verific motorul ales la
ncalzire prin metoda cuplului echivalent.
5.6 Calculul puterii motorului pentru acionarea cabestanului de manevr (legare)
A. Alegerea preliminar a puterii motorului electric
1. Calculul cuplului pentru tragerea parmei de legare cu fora de traciune
nominal (pentru parme din oel, vegetale i sintetice):
c
c
mec
F D
M
i 2
Pentru parmele de legare fora nominal de traciune se stabilete conform
relaiei (5.5).
2. Viteza motorului electric n rot/min:
[ ] min / rot
D
i v
n
c
c
neces n
n care v
c
n [m/min] se alege pe baza recomandrilor din paragraful 5.2.2.
3. Corespunztor valorilor obinute la punctul 1 i 2, puterea necesar motorului
electric este:
[ ]
c nneces
nneces
M n
P kW
9550
(5.63)
(5.64)
(5.65)
240
4. Cuplul de pornire necesar motorului electric pentru curent alternativ pe
caracteristica turaiei de baz, pentru curent continuu pe caracteristica destinat pornirii,
este:
c neces p
M 2 M
5. Cuplul necesar frnei electromagnetice care acioneaz pe axul motorului
electric:
c
FEneces
mec
, F D
M
i
1 5
2
6. Se alege motorul electric din catalogul de motoare destinate serviciului S2
avnd n vedere urmtoarele cerine:
a. Cuplul nominal pentru serviciul de scurt durat, 30 minute, pe caracteristica
turaiei de baz s fie:
c n
M M
b. Cuplul de frnare al frnei electromagnetice trebuie s asigure meninerea unei
fore de traciune egal cu 150% din fora de traciune nominal a cabestanului:
c calc FE FE
M 5 , 1 M M
B. Verificarea motorului electric din punct de vedere al asigurrii vitezelor date
pentru tragerea parmelor
7. Calculul cuplului la axul motorului electric pentru tragerea parmelor cu vitez
mic:
M
c min
= 0,75M
c
Calculul se efectueaz pentru cele trei tipuri de parme: din oel, vegetale i
sintetice.
8. Calculul cuplului la axul motorului electric pentru tragerea parmelor cu vitez
mare (parme libere, fr ncrcare):
M
c max
= 0,2M
c
Calculul se efectueaz pentru trei tipuri de parme.
9. Corespunztor cuplurilor M
c
, M
c min
i M
c max
din caracteristica mecanic a
motorului electric se determin turaiile n
c
, n
c min
i n
c max
pentru trei tipuri de parme.
10. Viteza de virare nominal a parmelor n m/min este:
c c
c
D n
v
i
(5.66)
(5.67)
(5.68)
(5.69)
(5.70)
(5.71)
(5.72)
241
Cu relaia (5.72) se determin i vitezele minim i maxim introducnd n
expresie turaiile corespunztoare n
c mi n
i n
c max
.
C. Verificarea motorului electric pentru fora maxim dezvoltat la cabestan
11. Calculul forei tangeniale maxime la tamburul cabestanului cnd motorul de
curent alternativ dezvolt cuplul maxim sau cuplul maxim dezvoltat de motorul de curent
continuu permis de protecia acestuia:
mec max
max
c
i M
F
D
2
12. Fora admis la tamburul cabestanului din condiii de siguran a parmelor:
F
ad
= 0,75F
n care F este fora nominal de traciune a parmelor determinat din condiia (5.5).
Fora maxim dezvoltat de motor trebuie s fie mai mic dect fora admisibil:
F F
ad max
Pe baza rezultatelor obinute se concluzioneaz cu privire la alegerea corect a
motorului electric pentru cabestanul dat.
5.7 Scheme de comand pentru acionarea electric a mecanismelor de ancorare-
acostare
5.7.1 Clasificare. Tipuri de protecie electric
Schemele electrice de comand a acionrii mecanismelor de ancorare, legare i
remorcare se clasific astfel:
scheme de comand cu controler;
scheme de comand cu relee i contactoare;
scheme de comand pentru sistemul generator-motor;
scheme de comand cu tiristoare.
n cele ce urmeaz se va face o analiz succint a acestor scheme.
a. Scheme de comand cu controler
Se utilizeaz, de regul, pentru puteri mici, pn la 20kW i prezint avantajul c
sunt simple, precise, au gabarite i greuti reduse. Se folosesc n situaiile n care
frecvena pornirii instalaiilor este mic, ceea ce este caracteristic pentru funcionarea
instalaiei de ancorare. Pornirea i reglarea vitezei necesit atenie i pregtire
corespunztoare din partea operatorului. Aceste scheme nu pot asigura regimul de
(5.73)
(5.74)
(5.75)
242
limitare automat a cuplului pe timpul creterii sarcinii n perioada de smulgere a ancorei,
pentru aceast limitare se cere intervenia operatorului.
Controlerul de comand se dispune n apropierea motorului electric i
mecanismului acionat. Conectarea tensiunii de alimentare se face printr-un contactor de
linie a crui bobin este alimentat atunci cnd controlerul se afl pe poziia zero. Acest
contactor are rolul de releu de tensiune minim i n acelai timp tot prin ntreruperea
bobinei contactorului acioneaz i protecia la suprasarcin.
b. Scheme de comand cu relee i contactoare
Aceste scheme sunt cele mai rspndite pe navele aflate n exploatare.
Schemele de comand cu relee i contactoare asigur automat procesul de
pornire, reglarea turaiei i protecia electric necesar electromotoarelor.
Pentru comand se folosesc contactoare i relee dispuse ntr-un dulap numit staie
magnetic.
Cel mai frecvent se folosete pornirea automat a motoarelor n funcie de timp.
Pornirea motoarelor n funcie de curent sau n funcie de vitez este mai dificil de
aplicat din mai multe motive, dintre care enumerm: temperatura variabil a mediului,
fluctuaia sarcinii, fluctuaia cderilor de tensiune a reelei.
Comanda acionrii electrice se realizeaz cu controler de comand, de dimensiuni
reduse avnd n vedere c n circuitele de for comutrile necesare sunt realizate prin
contactele contactoarelor, rolul controlerului fiind de a comanda nchiderea sau deschiderea
circuitelor de alimentare a bobinelor contactoarelor. Regula este ca rotirea manetei
controlerului n sensul acelor de ceasornic (micarea spre dreapta) s corespund ridicrii
ancorei sau strngerii parmei i n sens invers coborrii ancorei sau filrii parmei.
c. Scheme de comand pentru sistemul generator-motor
Se folosesc pentru puteri mari ale instalaiilor de ancorare, corespunztoare unor
calibre ale lanului de ancor care depesc 49mm.
Acest sistem asigur cele mai bune caracteristici mecanice: reglarea vitezei n
limite largi, siguran deplin n funcionare, motiv pentru care sunt preferate pentru
utilizri pe nave de pasageri.
Pentru reducerea neajunsului privind mrirea puterii instalate s-a ajuns la soluia
realizrii unui singur convertizor motor-generator care poate fi cuplat pe rnd cu mai
multe agregate cu funcionri asemntoare i care nu lucreaz simultan.
d. Scheme de comand cu tiristoare
Comanda cu tiristoare a motorului electric de curent continuu reprezint una din
direciile moderne de dezvoltare a acionrilor electrice navale. Acest sistem concureaz
sistemul generator-motor din punct de vedere al realizrii caracteristicilor mecanice.
Problema care trebuie rezolvat const n ridicarea fiabilitii acestui sistem pentru
condiiile de exploatare de la bordul navelor.
Sistemul permite utilizarea motorului de curent continuu pe nave electrificate n
curent alternativ, cu toate avantajele sale privind caracteristicile mecanice.
n ceea ce privete protecia motoarelor electrice de acionare a mecanismelor de
ancorare, legare i remorcare, conform regulilor de clasificare i construcie a navelor
maritime aceasta trebuie s asigure:
protecia maximal de curent;
243
protecia termic de suprasarcin;
protecie pentru limitarea sarcinii;
protecie minimal de tensiune.
n continuare se prezint rolul i modul n care se realizeaz aceste protecii n
schemele electrice.
a. Protecia maximal de curent
Protecia maximal de curent acioneaz la curenii de scurtcircuit. Valorile
acestor cureni depesc de la cteva ori pn la zeci de ori valoarea nominal a
curentului. Pentru a nu pune n pericol motorul electric, protecia n acest caz trebuie s
acioneze instantaneu i s deconecteze alimentarea motorului electric.
Protecia maximal de curent se realizeaz cu relee electromagnetice al cror
timp de acionare este foarte mic, 0,05 - 0,08 secunde. Reglarea curentului de anclanare
se face n limitele 2,25 - 3,5I
n
(I
n
- valoarea nominal a curentului).
Pentru motoare asincrone cu rotorul n scurtcircuit releele electromagnetice
pentru protecia maximal de curent nu pot fi ntrebuinate ntruct ar putea aciona la
curenii de pornire care depesc de 4 - 6 ori valoarea curentului nominal. n cazul
motoarelor asincrone cu rotor bobinat se pot utiliza relee maximale de curent montate pe
fazele rotorului.
b. Protecia termic la suprasarcin
Aceast protecie acioneaz la suprasarcin, adic la depiri mici ale sarcinii
nominale, n limitele 1,1 - 1,25I
n
. ntruct suprasarcina poate fi suportat de motorul
electric un anumit timp fr pericol, protecia trebuie s acioneze temporizat astfel nct
suprasarcinile de scurt durat, accidentale sau normale, cum ar fi perioada de pornire, s
nu conduc la acionarea proteciei.
Protecia la suprasarcin se realizeaz cu relee termice sau n ultimul timp se
folosesc termoelemente sau termorezistene montate pe nfurrile motorului electric, n
interiorul acestuia.
Dac suprasarcina este de durat i deci pune n pericol integritatea motorului
electric, n aceast situaie releele termice acioneaz i deconecteaz motorul electric de
la reea.
Schemele de comand prevd posibilitatea ca n situaii deosebite, de avarii, prin
apsarea pe un buton s se anuleze aciunea releelor termice i deci motorul electric s-i
continue funcionarea n suprasarcin pentru a face fa situaiei.
c. Protecia pentru limitarea sarcinii
Se realizeaz cu relee electromagnetice de curent reglate pentru a aciona n
limitele 1,5 - 2I
n
.
n acest caz, la apariia unei suprasarcini pe treptele de vitez superioar, prin
aciunea acestui releu se comut automat funcionarea motorului electric pe alt
caracteristic mecanic corespunztoare unei viteze mai mici. Acest lucru la motoarele
asincrone n scurtcircuit se obine prin comutarea nfurrii statorice pentru un numr de
poli mai mare, iar la motoarele de curent continuu i motoarele asincrone cu rotor bobinat
prin introducerea unor trepte de rezisten n circuitul rotorului.
244
Prin acest procedeu se face fa suprasarcinii fr a deconecta motorul electric de
la reea.
Pentru ca releele electromagnetice de sarcin s nu acioneze la curenii de
pornire, acestea se construiesc cu temporizare la acionare.
d. Protecia la tensiune minim
Protecia la tensiune minim acioneaz la scderea tensiunii sub 0,5U
n
sau la
dispariia tensiunii de alimentare i se realizeaz cu relee electromagnetice. Prin aciunea
acestor relee se scoate din funciune instalaia. La revenirea tensiunii de alimentare
instalaia nu funcioneaz. Este necesar intervenia operatorului care readuce manual
controlerul de comand pe poziia zero i astfel schema este pregtit pentru o nou
funcionare.
5.7.2 Scheme electrice de comand cu controler a acionrii cabestanelor
(vinciurilor) de ancor
n figura 5.12 este reprezentat schema electric de comand prin controler a
acionrii cabestanului de ancor cu motor asincron n scurtcircuit.
Elementele componente ale schemei reprezentate n figura 5.12 sunt:
m - motor asincron n scurtcircuit avnd pe stator trei nfurri
construite pentru numrul de poli 2p = 4, 8, 16;
C1 - contactor de linie;
C2, C3 - contactoare pentru cuplarea nfurrii de vitez maxim;
m2 - transformator pentru alimentarea schemei de comand;
n1, n2 - diode redresoare;
FE - frna electromagnetic;
b(1-1) b (12-12) - contactele controlerului de comand;
b1 - buton de avarie;
e
1
e
4
- relee termice pentru protecie la suprasarcin;
f - sigurane fuzibile pentru protecia schemei de comand.
Situaia elementelor schemei la aplicarea tensiunii de la reea. La aplicarea
tensiunii de la reea, controlerul de comand fiind pe poziia zero, este nchis contactul
b(1-1) i va fi pus sub tensiune contactorul de linie C1 care i nchide contactele
pregtind schema pentru funcionare.
Funcionarea. Pe prima poziie VIRA se deschide contactul b(1-1) i se nchid
contactele b(3-3), b(5-5), b(7-7), b(10-10), b(11-11) i b(12-12). Motorul se cupleaz
la reea pentru succesiunea normal a fazelor, cu nfurarea corespunztoare numrului
de poli 2p=16 i pornete cu viteza minim.
Pe poziia 2 VIRA se deschid contactele b(10-10), b(11-11), b(12-12) i se
nchid contactele b(8-8) i b(9-9). Se ntrerupe alimentarea nfurrii 2p=16 i se
alimenteaz nfurarea corespunztoare pentru 2p=8. Viteza de rotaie va fi viteza medie.
245
Pe poziia 3 VIRA se nchide n plus contactul b(2-2) care stabilete circuitul
de alimentare a contactoarelor C2 i C3. Prin contactele principale ale acestor contactoare
se deconecteaz nfurarea de vitez medie i se conecteaz nfurarea de vitez
maxim (2p=4). n paralel cu contactul b(2-2) se nchide contactul C2(6-8) de
automeninere.
Pe poziia 4 se menine viteza maxim, dar spre deosebire de poziia 3 pe aceast
poziie funcioneaz protecia de suprasarcin.
Funcionarea pe poziiile FILA este aceeai, schema fiind simetric. Deosebirea const
numai n faptul c n locul contactelor b(3-3), b(5-5) se nchid contactele b(4-4), b(6-
6) prin care se inverseaz dou faze ale tensiunii de alimentare i se obine n acest fel
schimbarea sensului de rotaie.
Protecia. Releele termice e1, e2, e3, e4 asigur protecia la cureni maximali.
Protecia acioneaz prin contactele normal nchise aflate n circuitul de alimentare a
contactorului de linie. La deschiderea unui contact al releelor termice se asigur deconectarea
motorului de la reea prin contactorul de linie. Butonul b1 are rolul de a bloca aciunea
proteciei n anumite situaii cnd este necesar meninerea n funciune a acionrii pentru o
durat scurt de timp, cu riscul care exist n ceea ce privete distrugerea motorului dac se
prelungete peste o anumit limit timpul de anulare a proteciei.
Protecia la sarcin este realizat de releul d montat n circuitul nfurrii de
vitez maxim (2p = 4). n situaia n care funcionnd cu viteza maxim, controlerul pe
poziia 4, apare o suprasarcin care se menine o anumit durat, acioneaz releul d i
prin deschiderea contactului d(3-5) se ntrerupe alimentarea contactoarelor C2, C3. Ca
urmare se deconecteaz automat nfurarea de vitez maxim i se conecteaz
nfurarea de vitez medie. Dup trecerea perioadei de suprasarcin pentru a restabili
concordana dintre poziia controlerului i viteza motorului se revine pe poziia 2 sau 3
dup cum se dorete meninerea vitezei medii sau trecerea din nou la viteza maxim.
Protecia la tensiune minim este asigurat de contactorul de linie C1.
n cazul acionrii cabestanului de ancor cu motor asincron cu trei viteze, de
regul, viteza medie este viteza de baz. Viteza minim se folosete la aezarea ancorei n
nar, iar viteza maxim pentru ridicarea ancorei dup smulgere.
246
Fig. 5.12 Schema electric de comand prin controler a acionrii cabestanului de ancor cu motor de
curent alternativ
247
Schema de comand cu controler prezentat n figura 5.12 se utilizeaz pentru
puteri reduse cuprinse n limitele 6 - 12kW. Pentru astfel de puteri comanda cu controler
prezint o serie de avantaje: simplitate, siguran n funcionare, greuti i gabarite
reduse.
n ambele scheme prezentate, pe timpul filrii ancorei cu ajutorul dispozitivului
electric de acionare, motorul electric poate lucra n regim de funcionare ca motor sau
generator cu frnare dinamic n cazul motorului de curent continuu sau generator cu
recuperare n cazul motorului asincron.
Regimul de funcionare ca motor poate ava loc n momentul iniial al filrii cnd
cuplul dat de greutatea ancorei este mai mic dect cuplul forelor de frecare din
mecanismul de transmisie i pentru coborrea ancorei maina electric dezvolt un cuplu
motor de nvingere a frecrilor transmisiei mecanice. De la o anumit adncime, greutatea
ancorei i a lanului creeaz un cuplu mai mare dect cel dat de forele de frecare i
maina electric trece n regim de generator, dezvoltnd un cuplu de frnare care
limiteaz viteza de coborre a ancorei.
5.7.3 Scheme electrice de comand cu relee i contactoare ale acionrii cabestanelor
(vinciurilor) de ancor
Schema de comand cu contactoare i relee n curent alternativ a acionrii
cabestanului de ancor cu motor asincron cu rotor n scurtcircuit este prezentat n figura
5.13.
Pentru realizarea celor trei trepte de vitez n crestturile statorului sunt dispuse
dou nfurri separate dintre care una este comutabil. nfurarea comutabil pentru
conexiunea triunghi are numrul de poli 2p = 16, iar pentru conexiunea dubl stea are
numrul de poli 2p = 8, ceea ce corespunde vitezelor sincrone de 375 rot/min i 750
rot/min. nfurarea necomutabil este realizat cu numrul de poli 2p = 4, corespunztor
vitezei sincrone de 1500 rot/min.
Elementele componente ale schemei electrice din figura 5.13 sunt:
m - motor electric asincron cu rotorul n scurtcircuit, cu trei trepte de
vitez;
C1, C2 - contactoare de cuplare la reea pentru sensurile de rotaie dreapta
sau stnga;
C3 - contactor pentru conectarea nfurrii comutabile, n triunghi;
C4, C6 - contactoare pentru cuplarea nfurrii comutabile n dubl stea;
C5 - contactor pentru cuplarea nfurrii necomutabile;
C7 - contactor pentru cuplarea bobinei frnei electromagnetice;
d1 - releu de tensiune minim;
d2 - releu pentru comutare automat de la vitez mare la vitez medie;
d3 - releu pentru blocarea aciunii proteciei;
d4 - releu de sarcin;
e1, e2, e3 - relee termice de protecie maximal de curent;
FE - bobina frnei electromagnetice;
b(1-1) b(8-8) - contactele controlerului de comand;
248
b1 - buton pentru anularea proteciei;
h - lamp de semnalizare. Este aprins cnd poziia controlerului
corespunde cu viteza motorului i se stinge cnd acioneaz
protecia de sarcin;
f - sigurane fuzibile pentru protecia schemei de comand;
a - separator cu prghie.
Situaia elementelor schemei la aplicarea tensiunii de la reea. Se nchide
separatorul pentru aplicarea tensiunii schemei de comand. Controlerul fiind pe poziia
zero sunt nchise contactele b(1-1) i b(8-8). Sunt alimentate releele d1 i d2 care nchid
contactele d1(2-4), d2(2-4), d2(6-8), d2(10-12) i deschid contactul d2(3-5). Se aprinde
lampa de semnalizare h i schema este pregtit pentru funcionare.
Funcionarea. Pe poziia 1 VIRA sunt nchise contactele b(1-1), b(2-2), b(3-
3) i se deschide contactul b(8-8).
Tensiunea de alimentare a schemei de comand se menine prin contactul releului
de tensiune minim d1(2-4). Sunt nchise circuitele de alimentare pentru contactoarele C1
i C3. Contactele principale ale acestor contactoare conecteaz nfurarea comutabil cu
conexiunea triunghi (2p=16) la reeaua de alimentare. Motorul pornete cu viteza minim
n sensul virare a ancorei la bord.
n figura 5.14 sunt prezentate caracteristicile mecanice ale motorului electric
corespunztoare celor trei trepte de vitez.
n poziia 1 a controlerului corespunztoare turaiei minime punctul de
funcionare se situeaz pe caracteristica mecanic 1.
n poziia 2 VIRA se deschide contactul b(2-2) i se nchid contactele b(4-4)
i b(6-6). Este ntrerupt alimentarea contactorului C3 i se stabilete alimentarea pentru
contactoarele C4, C6 n ordinea C6, C4. Ca urmare se schimb conexiunea nfurrii
comutabile din triunghi n dubl stea i corespunztor se modific numrul de poli de la
2p = 16 la 2p = 8. Turaia motorului electric va crete de la valoarea minim la valoarea
medie.
249
2p =
16/8
2p
= 4
250
Fig. 5.13 Schema electric de comand a acionrii cabestanului de ancor cu relee
i contactoare pentru motor asincron n scurtcircuit cu trei viteze
251
Fig. 5.14 Caracteristicile mecanice ale acionrii cu motor asincron cu trei trepte de vitez
n poziia 1 a controlerului corespunztoare turaiei minime punctul de
funcionare se situeaz pe caracteristica mecanic 1.
n poziia 2 VIRA se deschide contactul b(2-2) i se nchid contactele b(4-4)
i b(6-6). Este ntrerupt alimentarea contactorului C3 i se stabilete alimentarea pentru
contactoarele C4, C6 n ordinea C6, C4. Ca urmare, se schimb conexiunea nfurrii
comutabile din triunghi n dubl stea i corespunztor se modific numrul de poli de la
2p = 16 la 2p = 8. Turaia motorului electric va crete de la valoarea minim la valoarea
medie.
La mutarea controlerului pe poziia 3 se deschid contactele b(1-1), b(4-4) i se
nchide contactul b(7-7). Fiind deschis i contactul d2(3-5) se ntrerupe alimentarea
contactoarelor C4, C6 i este alimentat contactorul C5. Prin aceasta nfurarea
comutabil este scoas de sub tensiune i se cupleaz la reea cea de-a doua nfurare,
care asigur viteza mare de funcionare a motorului electric. Punctul de funcionare se
mut pe caracteristica mecanic 3. Pe poziia 3 a controlerului alimentarea releului d2
este meninut prin propriul contact d2(10-12).
Schema fiind simetric, funcionarea pe poziiile FILA ale controlerului este
identic.
Aa cum se observ din reprezentarea caracteristicilor mecanice n figura 5.14,
comutarea triunghi - dubl stea utilizat pentru nfurarea comutabil asigur schimbarea
turaiei de la simplu la dublu i reducerea la jumtate a cuplului, meninndu-se constant
puterea motorului electric. Aceast soluie este optim pentru acionrile de la bordul
navei ntruct prin comutare nu se produc ocuri de curent n reea. Comutarea stea -
dubl stea care asigur meninerea aproximativ constant a cuplului i dublarea puterii nu
este de preferat n condiiile n care motorul electric de acionare a cabestanului este un
consumator mare de putere, iar centrala electric de la bordul navei are putere limitat.
252
Din acelai motiv, nfurarea necomutabil pentru viteza mare se realizeaz
pentru aceeai putere astfel nct la comutarea treptelor de vitez puterea absorbit de
motorul electric din reea rmne constant pentru o anumit valoare a cuplului de
sarcin.
Caracteristica mecanic 2 corespunztoare vitezei medii reprezint caracteristica
de baz pentru funcionarea motorului electric de acionare a cabestanului de ancor.
Viteza mic se folosete pentru poziionarea ancorei n nar, iar viteza mare pentru
ridicarea ancorei dup smulgere.
Protecia. La funcionarea motorului electric cu vitez mare, n cazul apariiei unei
suprasarcini care se menine o anumit durat, releul de sarcin d4 asigur scderea
automat a vitezei. Controlerul de comand fiind pe poziia 3, dac apare o suprasarcin de
durat, acioneaz releul d4 i se deschide contactul d4(3-5) prin care se ntrerupe
alimentarea releului d2. Prin deschiderea contactului d2(6-8) se ntrerupe alimentarea
contactorului C5 i prin nchiderea contactului d2(3-5) se conecteaz alimentarea
contactoarelor C4 i C6. nfurarea corespunztoare vitezei mari este scoas de sub
tensiune i se pune sub tensiune nfurarea comutabil cu conexiunea dubl stea.
Motorul electric i va reduce automat viteza de la valoarea mare la valoarea
medie. Contactul d2(2-4) se deschide i lampa de semnalizare h se stinge indicnd att
funcionarea proteciei de sarcin, ct i faptul c poziia controlerului nu mai este n
concordan cu viteza real a motorului electric.
Dup trecerea a cteva zeci de secunde, releul d4 i nchide din nou contactul
d4(3-5) ns circuitul releului d2 nu se restabilete ntruct pe poziia 3 a controlerului este
deschis contactul b(1-1). Pentru conectarea din nou a nfurrii de vitez mare este
necesar s se revin cu controlerul pe poziia 2 i dup aceea s se treac pe poziia 3. La
revenirea pe poziia 2 se nchide circuitul de alimentare al releului d2 i se aprinde lampa
h indicnd faptul c poziia controlerului este n concordan cu viteza motorului.
Protecia maximal de curent este asigurat de releele termice e1, e2, e3. La
depirea de durat peste o anumit limit a curentului nominal contactele releelor
termice ntrerup funcionarea motorului electric prin deschiderea circuitului de alimentare
a releului de tensiune minim.
Protecia la tensiune minim este asigurat de releul d1.
n situaiile n care condiiile de exploatare impun ca necesar funcionarea
instalaiei chiar cu riscul de a se deteriora, schema este prevzut cu posibilitatea de anulare
a proteciei. Prin apsarea pe butonul b1 este alimentat releul d3 care prin contactele d3(2-
4) i d3(6-8) anuleaz protecia de sarcin i protecia maximal. Anularea proteciei
dureaz ct timp se ine apsat butonul b1. Operatorul trebuie s cunoasc c prelungirea
timpului de apsare peste o anumit limit duce la arderea motorul electric.
Schemele de comand a acionrii cabestanului de ancor cu motoare asincrone
n scurtcircuit se ntrebuineaz pentru puteri pn la 60kW. Pentru puteri mai mari, pn
la 100kW, se utilizeaz motorul asincron cu rotor bobinat. La puteri mari schema de
acionare necesit o cantitate sporit de aparataj electric i devine comparabil din punct
de vedere al preului de cost cu sistemul generator-motor. n aceast situaie este de
preferat sistemul generator-motor care asigur cel mai bine caracteristicile mecanice
necesare pentru acionarea cabestanului de ancor, prezint siguran n funcionare i
simplitate n exploatare.
253
ACIONAREA ELECTRIC A INSTALAIILOR DE
NCRCARE DESCRCARE
6.1 Destinaie, regimuri de lucru i tipurile mecanismelor navale de ncrcare
Vinciurile de ncrcare i macaralele navale sunt destinate, n principal, pentru
lucrrile de ncrcare-descrcare executate la bordul navelor.
n construcia navelor moderne se urmrete creterea rentabilitii exploatrii
navei care se obine n principal prin reducerea duratei de staionare n porturi pentru
operaii de ncrcare-descrcare i micorarea duratei de deplasare ntre dou porturi prin
sporirea vitezei de mar. Navele de mrfuri moderne i cele n perspectiv ajung la viteze
de 22 Nd i se preconizeaz pentru viitor de 30-32 Nd.
Dotarea navei cu instalaii moderne de ncrcare-descrcare, care s duc la
scurtarea duratei acestor lucrri, constituie calea principal de mrire a eficienei
economice a navei, avndu-se n vedere c pentru o nav comercial 1/3 pn la 2/3 din
perioada de exploatare reprezint timpul lucrrilor de ncrcare-descrcare.
Mecanismele de ncrcare-descrcare se caracterizeaz prin existena unui numr
mare de regimuri de lucru i funcioneaz cu sarcini i viteze care se repet ciclic. Durata
unui ciclu const din perioadele n care mecanismul funcioneaz i din pauze. Durata
pauzelor depinde de rapiditatea prinderii i desprinderii ncrcturii i variaz n limite
foarte largi. Gama de viteze a acestor mecanisme trebuie s fie foarte mare ntruct, pe de
o parte, vitezele mari scurteaz durata ciclului, iar vitezele mici permit aezarea fr
ocuri a ncrcturii.
Pe baza datelor referitoare la regimurile de funcionare ale mecanismelor de
ncrcare-descrcare se pot determina caracteristicile optime de vitez i parametrii
regimurilor crora trebuie s le corespund acionarea electric.
Mecanismele navei cu acionare electric pentru manevrarea greutilor pot fi
clasificate dup: destinaie, tipul mecanismului de transmisie, sistemul de comand i
dup felul curentului.
n funcie de destinaie, dup caracterul operaiei ndeplinite, se mpart n:
vinciuri de ncrcare i macarale pentru mrfurile generale, adic mrfuri
transportate n pachete sau palei (baloi), rulouri, cutii, saci, butoaie i, de asemenea,
cherestea, laminate i mrfuri sub form de pulberi (crbune, minereu .a.);
vinciurile de ncrcare i macaralele pentru operaii speciale: ridicare alupe
sau brci de salvare, ridicare scar de bord, remorcare, ridicare traulere, ascensoare etc.
Dup tipul mecanismului de transmisie se mpart n vinciuri de ncrcare i
macarale cu transmisie mecanic i cu transmisie hidraulic.
Dup sistemul de comand mecanismele navale de ncrcare se mpart astfel:
comand direct prin controler;
comand prin relee i contactoare;
sistem generator-motor;
sisteme cu tiristoare sau amplificatoare magnetice.
n funcie de felul curentului, se disting mecanisme de ncrcare cu acionri
electrice de curent continuu i de curent alternativ.
254
Cele mai rspndite mecanisme navale de ncrcare sunt vinciurile i macaralele.
Vinciurile de ncrcare. n figura 6.1 este prezentat amplasarea unei instalaii de
ncrcare n prova navei.
Instalaia const din urmtoarele elemente principale: bigile 1, coloana 2, gurile
de magazie 3, parma i crligul de sarcin, vinciurile de ncrcare 4 i macaralele 5.
Vinciul de ncrcare este cuplat i cu un vinci de ridicare a bigii fr sarcin
necesar stabilirii poziiei iniiale a bigii. Cele dou vinciuri sunt blocate electric, astfel
nct nu pot funciona simultan.
Fig. 6.1 Amplasarea instalaiei de ncrcare
Vinciurile navale moderne se caracterizeaz prin dimensiuni relativ reduse, forme
simple i sunt construcii etane la ap.
Unele vinciuri, n afara tamburului principal de sarcin, au tambure auxiliare care
pot fi folosite pentru alte manevre, de exemplu pentru ridicarea i coborrea bigilor.
Stoparea rapid a vinciului i fixarea poziiei sarcinii atunci cnd motorul electric
de acionare este oprit, are loc prin acionarea automat a frnei electromagnetice
realizat n cele mai multe cazuri sub forma de frn disc montat pe axul motorului
electric.
Vinciul de ncrcare cu bigi reprezint o soluie simpl utilizat frecvent pe
navele comerciale datorit avantajelor sale comparativ cu alte instalaii de ridicare,
privind: posibilitatea de suprancrcare mrit, deservirea unei suprafee mai mari,
posibilitatea de a funciona i n condiii de oscilaii reduse ale navei. Ca dezavantaj, se
poate meniona durata de timp necesar pentru aducerea bigilor n poziia de lucru avnd
n vedere c pe timpul marului bigile se aeaz, de regul, n poziie orizontal n axul
navei.
Macaralele de ncrcare. n afara vinciurilor de ncrcare cu bigi, pe nave sunt
utilizate i macarale. Macaralele sunt prevzute cu mecanisme de ridicare a sarcinii,
mecanisme de rotire i mecanisme de basculare a braului macaralei pentru modificarea
razei de aciune. Toate aceste mecanisme se pot amplasa att pe punte, ct i sub punte, iar
motoarele electrice de acionare se amplaseaz pe platforma rotitoare a macaralei primind
255
alimentarea prin ci de curent speciale. Tot echipamentul electric este amplasat pe macara
i cele trei mecanisme pot funciona separat sau simultan.
Macaralele prezint avantajul c, spre deosebire de vinciurile de ncrcare cu bigi,
sunt permanent gata de funcionare. Ele realizeaz cicluri de funcionare mai scurte i deci
productivitate mrit. Sunt de asemenea construcii compacte realizate etan la ptrunderea
apei. n acelai timp prezint i unele neajunsuri comparativ cu vinciurile de ncrcare, cum
ar fi: posibilitate limitat de suprancrcare, suprafaa deservit este mai mic, limitarea
lucrului pentru nclinri ale braului mai mici de 5 sau n condiii de oscilaii ale navei.
Regimurile de funcionare ale vinciurilor de ncrcare sunt n funcie de caracterul
operaiunilor de ncrcare i de felul sarcinii. Operaiunile de ncrcare se pot efectua cu o
big sau cu dou bigi.
Dac n timpul operaiunilor lucreaz o singur big, ridicarea i coborrea
sarcinii se efectueaz cu ajutorul vinciului, iar deplasarea pe orizontal se face manual
sau cu ajutorul unui alt vinci. n acest caz, se ridic mai nti sarcina, apoi se deplaseaz
pe orizontal, dup care se coboar. Dup eliberarea sarcinii, crligul gol se deplaseaz n
sens invers.
La efectuarea operaiunilor de ncrcare-descrcare cu ajutorul a dou bigi, una din
ele se aduce deasupra gurii de magazie, iar cealalt deasupra locului de pe mal n care se
depune sarcina. Ambele capete ale parmelor celor dou vinciuri se leag la acelai crlig.
n figura 6.2 este prezentat amplasarea bigilor 1 i 2 n timpul ncrcrii navei prin acest
sistem i traiectoria sarcinii.
Operaiunea de ncrcare se efectueaz n urmtoarea succesiune. Vinciul 1 ridic
sarcina,n timp ce vinciul 2 elibereaz parma de manevr. Dup ce sarcina a fost ridicat,
vinciul 2 trage parma de manevr deplasnd sarcina pe orizontal n timp ce vinciul 1
elibereaz uor parma. Dup deplasarea sarcinii pe orizontal pn n dreptul gurii de
magazie, vinciul 2 coboar sarcina n magazie n timp ce vinciul 1 fileaz parma.
Mecanismelor navale moderne destinate pentru operaiunile de ncrcare-
descrcare li se cere s asigure: productivitate mare, siguran n funcionare, simplitatea
deservirii i a conducerii, economicitate, greutate i gabarite mici, simplitatea montrii.
Productivitatea vinciului de ncrcare se apreciaz dup cantitatea de marf
ncrcat n timp de o or.
Prin sigurana n funcionare se nelege o funcionare fr ntrerupere a vinciului
de ncrcat. Pentru aceasta este necesar ca instalaia s funcioneze sigur att din punct de
vedere al dispozitivelor electrice ct i mecanice.
Deservirea simpl presupune accesul comod la piesele care trebuie observate,
reglate, curite, unse, reparaii i nlocuiri simple precum i o schem electric simpl.
Prin simplitatea conducerii se nelege punerea uoar n funciune i posibilitatea
deservirii de ctre personal fr o calificare deosebit.
256
Fig. 6.2 Amplasarea bigilor i traiectoria de micare a sarcinii pe timpul lucrului cu dou bigi. a -
amplasarea bigilor, b - traiectoria ncrcturii
Economicitate nseamn pre de cost redus, reparaii cu costuri mici i
funcionarea instalaiei de ncrcare cu randament ridicat.
Simplitatea montrii se asigur prin dispunerea ntregii instalaii pe o plac
comun, astfel nct s fie montat uor la bordul navei.
n figura 6.3 este prezentat schema cinematic a vinciului cu transmisie
mecanic.
Vinciul de acest tip se compune din tamburul de sarcin 1 fixat pe axul 2
mpreun cu tamburii de manevr 3. Axul este cuplat prin reductorul cu roi cilindrice 4,
cu motorul electric 6 i frna electromagnetic 5.
Reductorul cu roi dinate cilindrice are randament ridicat, circa 0,8 - 0,85 i
moment de inerie redus, comparativ cu alte tipuri de reductoare. Pentru reducerea
zgomotului roile sunt cu dinii nclinai sau n V.
Vinciurile de acest tip se construiesc cu raport de transmisie constant sau reglabil
n dou trepte cu ajutorul unui schimbtor manual de vitez. Executarea transmisiei
mecanice cu dou trepte de reglare duce la dublarea numrului treptelor de reglare oferit
de schema electric de comand, ceea ce face s creasc productivitatea vinciului de
ncrcare.
257
Fig. 6.3 Schema cinematic a vinciului cu transmisie mecanic
n figura 6.4 este prezentat aspectul general al vinciului de ncrcare.
Fig. 6.4 Aspectul general al vinciului de ncrcare
Vinciul prezentat n figura 6.4 se compune din: flana motorul electric1, reductor
2, tambur de sarcin 3, tambur de manevr 4, staie magnetic 5. Toate elementele
vinciului, inclusiv postul de comand, sunt montate pe o plac comun pentru a uura
montarea la bordul navei.
Sunt folosite de unele firme constructoare i transmisii mecanice cu urub melc-
roat melcat. Acest tip de transmisie ofer posibilitatea reducerii greutii i gabaritelor
transmisiei, n schimb ns, randamentul acestor transmisii este mai mic comparativ cu
randamentul transmisiei cu roi cilindrice.
n tabelul 6.1 se prezint cteva date tehnice ale unor vinciuri de 1,5 i 5 t
acionate cu motor de curent continuu i cu motor de curent alternativ.
258
Tabelul 6.1
Caracteristici tehnice Curent continuu Curent alternativ
Capacitate nominal de
ncrcare [t]
1,5 3 5/3 1 1,5 5/3
Diametrul tamburului de
sarcin [mm]
350 400 500 350 400 500
Tipul reductorului Cu o vitez Cu dou
viteze
Cu o vitez Cu dou
viteze
Raport de transmisie 15,75 23,34 46,8
28,6
35 48,6 95,5
52
Viteza nominal de
ridicare a ncrcturii
nominale [m/min.]
59
54
32,6
56,5
57
48,5
28,4
52,8
Viteza maxim de ridicare
a unei jumti de
ncrctur nominal
raportat la viteza
nominal
1,2
1,2
1,2
1,01
1,01
1,01
Viteza minim de
coborre a ncrcturii
nominale raportat la
viteza nominal
0,085
0,055
0,064
0,054
0,2
0,19
0,19
Viteza maxim de ridicare
a crligului gol raportat
la cea nominal
2
2
2
1,04
1,04
1,04
Viteza maxim de
coborre a crligului gol
raportat la cea nominal
1,7
1,7
1,6
1,04
1,04
1,04
Puterea motorului [kW] 17,7 32,3 32,6 20 32 32
Viteza nominal de
rotaie, rot/min
670 740 740 1400 1410 1411
6.2 Prevederile societilor de clasificare
Alegerea tipului motorul electric i caracteristicile mecanice ale acionrii se
determin pe baza urmtorilor factori: caracteristicile de lucru ale mecanismului de
ncrcare, productivitatea, reglarea vitezei, caracterul proceselor tranzitorii, felul
curentului pe nav. n continuare se prezint o analiz a acestor cerine.
Asigurarea unei nalte productiviti este factorul de baz care determin
caracteristicile acionrii electrice. Unul din factorii importani care conduce la creterea
productivitii const n mrirea vitezei de ridicare a ncrcturii nominale. Ceilali factori
care conduc la scurtarea ciclului de ncrcare i pe aceast cale la creterea productivitii,
depind de felul ncrcturii i organizarea lucrrilor n magazii i la mal i nu pot fi
influenai de caracteristicile acionrii electrice.
Creterea vitezei de ridicare conduce la mrirea puterii acionrii electrice a crei
valoare este direct proporional cu viteza de ridicare conform relaiei de calcul:
259
n n
mec
G v
P
n care: G
n
- sarcina nominal, v
n
- viteza nominal,
mec
- randamentul transmisiei.
n acelai timp productivitatea vinciului nu va crete proporional cu creterea vitezei
de ridicare. La viteze mari se mrete poriunea de curs efectuat pe timpul accelerrii i
frnrii i, ntruct nlimea de ridicare a sarcinii nu este mare, viteza medie va crete cu
puin. n cele ce urmeaz se prezint modalitatea de alegere a vitezei de funcionare a
mecanismelor navale de ncrcat.
Considernd c viteza v crete liniar n timpul accelerrii, se poate determina
distana parcurs n timpul accelerrii S
a
:
2
t v
S
a
a
Dac presupunem c timpul de frnare este de dou ori mai mic dect cel de
accelerare, distana parcurs n timpul regimului tranzitoriu de accelerare i frnare este:
a
a
a f a t
t v 75 , 0
2
t
t
2
v
S S S
,
_
+ +
Timpul de accelerare depinde de acceleraia maxim admis pentru deplasarea
sarcinii n siguran, g
a
, care de obicei variaz n limitele:
[ ]
2
a
s / m 35 , 0 2 , 0 g
Considernd micarea uniform accelerat se calculeaz durata accelerrii,
a
a
g
v
t
i distana parcurs pe durata regimului tranzitoriu:
a
2
a
t
g
v
75 , 0
g
v
v 75 , 0 S
Pentru valoarea medie a acceleraiei g
a
= 0,25 m/s
2
, rezult
2
t
v 3 S
Pe de alt parte, timpul total de ridicare a sarcinii cu viteza v la nlimea H este:
f a
t
t t
v
S H
T + +
Utiliznd expresiile anterioare se obine:
v
v 3 H
v
S H
v
S 2
v
S H
t 5 , 1
v
S H
t 5 , 0 t
v
S H
T
2
t
t t
a
t
a a
t
+
+ +
(6.1)
(6.2)
(6.3)
(6.4)
(6.5)
(6.6)
(6.7)
(6.8)
(6.9)
260
n figura 6.5 sunt prezentate curbele T = f(v) construite pe baza expresiei (6.9)
pentru nlimile de ridicare cele mai posibile, de 10 m i 7 m.
Din figura 6.5 se observ c pentru viteze de 1,2 - 2 m/s (n funcie de nlimea
de ridicare) timpul de ridicare rmne practic constant.
Rezult c la creterea vitezei peste 1 - 1,2 m/s nu se obine reducerea timpului de
ridicare, n schimb se mrete foarte mult puterea acionrii electrice, care, aa cum am
menionat, este direct proporional cu viteza. De remarcat c practica confirm aceste
concluzii.
Ca urmare, pentru nlimi medii, pn la 10 m, viteza nominal de ridicare a sarcinii
nominale adoptat de cele mai multe firme constructoare este de 0,75 0,92 m/s (45 55
m/min.), iar pentru nlimi mai mari, de 1,25 m/s (85 m/min.). n practic, se ntlnesc uneori
i viteze de 2 m/s (120 m/min.).
Reglarea n limite largi a vitezei. ntruct puterea motorului electric este
determinat n funcie de viteza nominal de ridicare, v
n
, a sarcinii nominale, G
n
, pentru
utilizarea ct mai complet a puterii motorului i pentru scurtarea duratei ciclului de
ncrcare-descrcare se recomand ridicarea crligului gol sau cu sarcin redus, cu o
vitez mai mare dect cea corespunztoare sarcinii nominale. Se pot admite n aceste
cazuri i acceleraii mai mari dect la funcionarea nominal.
Fig. 6.5 Curbele T =f(v) pentru h = 10 m i H = 7 m.
Pentru a asigura creterea automat a vitezei la funcionarea n gol sau cu sarcin
mic i n acelai timp pentru a simplifica schema de comand este necesar s se utilizeze
motoare electrice a cror turaie s creasc automat la reducerea sarcinii.
n practica lucrului cu instalaiile de ncrcat, viteza de ridicare i coborre a
crligului gol nu poate fi mrit peste o anumit limit, existnd riscul slbirii parmei de
traciune pe toba vinciului i ncurcarea acesteia. n practic, viteza de ridicare i coborre
a crligului gol este mai mare de 3 - 4 ori dect viteza nominal de ridicare a sarcinii.
Cteva firme engleze (de exemplu firma Clarke Chapmann) admit mrirea acestei
viteze pn la de 5 - 6 ori n raport cu viteza nominal.
Reglarea vitezei vinciului este solicitat i pentru coborrea ncrcturilor. Pentru
o serie de mrfuri (laminate, mrfuri n saci) viteza mare de coborre nu este duntoare.
Sunt ns i alte mrfuri (aparate, obiecte din sticl sau ceramic) care necesit limitarea
261
vitezei de coborre. De asemenea, pentru aezarea fr ocuri, ndeosebi atunci cnd
marea este agitat, este necesar micorarea vitezei de coborre. n practica exploatrii
s-a constatat c viteza de depozitare a sarcinii pentru o aezare normal a acesteia este
cuprins n limitele 0,1 0,25 m/s.
Vitezele relative ale acionrii vinciului pe durata operaiunilor de ncrcare-
descrcare n funcie de valoarea vitezei nominale se nscriu de regul n limitele:
viteza de ridicare a sarcinii normale v
n
viteza de ridicare a jumtii de sarcin nominal (1,5 1,7) v
n
viteza de ridicare a crligului gol (3 3,5) v
n
viteza de coborre a sarcinii nominale, sarcinii pariale i
crligului gol
(2 2,5) v
n
viteza de depozitare a sarcinii (1/5 1/3) v
n
Reducerea duratei regimului tranzitoriu. Deoarece nlimile de ridicare i
coborre a ncrcturilor sunt relativ mici, durata regimului tranzitoriu de accelerare i
frnare constituie o mare parte din timpul de lucru al vinciului. Regimul de lucru fiind un
serviciu intermitent de scurt durat este nsoit de numeroase porniri i opriri, pn la
500 de conectri pe or i chiar mai multe n unele cazuri.
Influena regimului tranzitoriu al acionrii se analizeaz din dou puncte de
vedere:
influena curenilor de pornire i frnare asupra reelei electrice de la bordul
navei;
durata accelerrii i frnrii sistemului.
Pentru micorarea duratei proceselor tranzitorii i scurtarea pe aceast cale a
ciclului de lucru al vinciului este necesar:
s se mreasc cuplul de pornire al motorului;
s se micoreze momentul de volant, GD
2
, al motorul electric.
Puterea surselor de energie electric la bordul navei, avnd o valoare relativ
redus se impune ca valoarea curentului de pornire pentru ca motorul electric de acionare
s nu depeasc anumite limite.
Valoarea cuplului de pornire pentru motoarele asincrone corespunde datelor din
catalogul firmelor constructoare.
Motoarele electrice cu vitez mare au gabarite, greuti i momente de volant mai
mici, dar necesit pentru acionarea vinciului mecanisme cu raport de transmisie mare,
ceea ce conduce la creterea greutii i a momentelor de inerie pe partea de transmisie
mecanic. De asemenea, creterea raportului de transmisie are ca urmare reducerea
randamentului transmisiei.
Motoarele electrice cu vitez mic necesit rapoarte de transmisii mai mici n
schimb au gabarite, greuti i momente de volant mai mari.
Din considerentele expuse mai sus se recomand ca soluii optime folosirea motoarelor de
curent alternativ cu turaia 1500 rot./min. iar n cazul curentului continuu cu turaia pn
la 1700 rot./min.
262
6.3 Stadiul actual i direcii de dezvoltare
6.3.1 Prezentarea general
Construcia navelor moderne electrificate n curent alternativ a impulsionat
dezvoltarea instalaiilor navale de ridicat. Aceste instalaii sunt alimentate n curent
alternativ i asigur productivitate nalt prin rapiditatea operaiilor de ncrcare-
descrcare i micorarea pe aceast cale a duratei de staionare a navei n porturi.
Exist dou tendine de dezvoltare a acionrilor electrice pentru instalaiile de
ncrcare. Una din ele privete folosirea nemijlocit a motoarelor de curent alternativ care
asigur simplitate, siguran i condiii uoare de exploatare, dar necesit n schimb luarea
unor msuri speciale pentru obinerea caracteristicilor optime de funcionare.
A doua direcie const n pstrarea n calitate de motor de execuie a motorului de
curent continuu cu posibilitile lui nalte de reglare i caracteristici perfect adaptate pentru
condiiile de lucru ale instalaiilor de ncrcare. n acest scop, se creeaz un sistem separat de
alimentare de la reeaua navei.
Fiecare din aceste direcii ofer la rndul lor multe posibiliti practice de rezolvare
care sunt aplicate n diferite ri de ctre firmele constructoare.
n continuare, se prezint principalele tipuri de acionri ntlnite mai frecvent la
bordul navelor.
6.3.2 Sisteme cu motor de execuie de curent alternativ
Acionarea electric cu motor asincron n scurtcircuit
Pentru acionarea instalaiilor de ncrcare se folosesc motoare asincrone n
scurtcircuit cu mai multe viteze, avnd nfurri cu comutarea numrului de poli sau
nfurri independente cu numere de poli diferite. Se prefer motoarele asincrone n
scurtcircuit cu alunecare mrit.
Motoarele asincrone n scurtcircuit cu pornire prin conectare direct la reea au
curentul de pornire mare, I
p
= (3,5 - 5) I
n
i avnd n vedere puterea mare a acestor
motoare, n cazul acionrii instalaiilor de ncrcare, se impun msuri speciale pentru
generatoarele sincrone din centrala electric a navei care s ofere posibilitatea funcionrii
stabile la ocuri mari de cureni n reea i restabilirea rapid a tensiunii nominale.
Primele succese n folosirea motoarelor asincrone n scurtcircuit pentru acionarea
instalaiilor navale de ncrcare au fost obinute de firma Siemens care a realizat seria de
vinciuri de 3 - 5 tone echipate cu motor asincron n scurtcircuit avnd trei trepte de viteze,
corespunztoare pentru numerele de poli 2 p = 4/8/32.
n prezent,motoarele asincrone cu mai multe viteze cunosc o larg rspndire pentru
acionarea electric a vinciurilor i macaralelor. Se prefer, n cele mai multe cazuri, motorul
cu trei trepte de vitez pentru acionarea mecanismului de ridicare a greutilor. Pentru
acionarea mecanismelor de basculare a braului i de rotire se folosesc motoare asincrone n
scurtcircuit cu dou trepte de vitez.
n anexele 2 se prezint caracteristicile tehnice ale motoarelor din seria MA, cu
serviciul de funcionare intermitent, folosite pentru acionarea instalaiilor navale de
ncrcare.
Motoarele asincrone cu trei viteze realizate de unele firme sunt construite cu dou
statoare i rotoare independente, asamblate mpreun. Unul din statoare are dou
nfurri corespunztoare vitezelor de valoare medie i mare. Motoarele din seria MA
prezentate n anexele 2 au un singur rotor i stator. Pe stator sunt dou nfurri din care
263
una este comutabil i asigur vitezele de valoare medie i mic. Exist, de asemenea, i
variante cu trei nfurri independente montate pe acelai stator.
n cazurile frecvente, motoarele asincrone asigur funcionarea pentru sarcina
nominal pe cele trei trepte, la cuplu constant. n funcie de turaie, puterea are variaii
mari pentru acest regim de funcionare, cu consecine asupra reelei electrice de bord.
Unele firme din ri ca Japonia, Germania practic folosirea motoarelor cu putere
constant pe treptele de reglare a turaiei. n acest caz, ridicarea sarcinii nominale se face
numai cu viteza medie. Vitez superioar se folosete pentru sarcini mai mici dect 1/2
din sarcina nominal. Pentru astfel de acionri se reduc ocurile de cureni n reea i se
asigur o funcionare n condiii optime a centralei electrice de la bord.
Practica funcionrii vinciurilor i a macaralelor acionate cu motoare asincrone
n scurtcircuit recomand folosirea numrului de poli 2 p = 4/8/32 sau 2 p = 4/8/28 ca
fiind optim pentru efectuarea lucrrilor de ncrcare n siguran i cu productivitate
sporit. Exist ns i produse ale unor firme care folosesc alte combinaii ale numrului
de poli.
Sistemul de acionare electric a vinciurilor de ncrcat i macaralelor cu motor
asincron cu rotor n scurtcircuit este larg rspndit i folosit n prezent de toate firmele
constructoare, ndeosebi pentru sarcini mici i medii, pn la 5 tone.
Pentru mbuntirea performanelor i eliminarea tabloului de comand, sistemele
de acionare electric moderne prevd utilizarea unui motor asincron, cu rotorul n
scurtcircuit cu o singur nfurare statoric, a crui vitez de rotaie se modific cu ajutorul
unui convertor static de frecven cu comand vectorial direct n cuplu i flux.
Acionarea electrohidraulic cunoate, de asemenea, o larg dezvoltare i
rspndire. Pentru acest tip de acionare se folosete motorul asincron n scurtcircuit cu o
singur vitez. Comanda reglrii se face pe partea de transmisie hidraulic. Acest sistem
se compune din electropomp i motorul hidraulic cu dispozitivele de reglare necesare.
Caracteristicile mecanice sunt rigide, dar datorit reglrii cu uurin pot fi obinute n
numr foarte mare pentru diferite nivele de vitez.
Pentru obinerea automat a unei caracteristici moi a acionrii se folosete de
ctre unele firme legtura invers ceea ce permite trecerea automat de pe o caracteristic
pe alta n funcie de sarcin. De exemplu, vinciul hidraulic realizat de firma Kampnagel
(Germania) asigur 5 trepte de vitez la modificarea sarcinii de ridicare de la valoarea
nominal pn la 20% din sarcina nominal.
Sunt realizate i se afl n exploatare la nave, instalaii de acionri electrohidraulice
pentru uzul general de 3,2 - 8 tone care asigur viteze de ridicare de 55 - 28 m/min, precum i
instalaii de puteri mari, 12 tone sau 25 tone, cu posibiliti de comand de la distan din
oricare punct de pe puntea navei.
6.4 Diagramele de sarcin ale mecanismelor de ncrcare descrcare
Regimurile de lucru ale motorului electric de acionare sunt determinate de
condiiile de lucru ale vinciului de ncrcare care, la rndul lor, sunt dependente de
caracterul prelucrrii sarcinii i procedeele folosite pentru ncrcare.
Funcionarea cu un singur vinci. Pentru primirea ncrcturii de la mal sau de la o
alt nav acostat n bord, aceasta, dup ce a fost legat la crligul vinciului, este ridicat,
transferat deasupra chepengului, cobort n cal, dup care se desfac legturile de
264
prindere i crligul gol execut cursa invers. Graficul cuplurilor de sarcin la axul
motorului, pe durata unui ciclu de manevrare a ncrcturii, este prezentat n figura 6.6.
n figura 6.6, M
1
, M
2
, M
3
, M
4
reprezint cuplurile de sarcin aplicate la axul
motorului electric, corespunztoare pentru ridicarea ncrcturii, coborrea ncrcturii,
ridicarea crligului gol i coborrea crligului gol. T - reprezint durata total a ciclului;
t
1
, t
2
, t
3
, t
4
- timpii de lucru cu cuplurile respective M
1
, M
2
, M
3
, M
4
; t
01
- timpul de rotire al
vinciului pentru deplasarea sarcinii pe orizontal de la locul de ridicare pn deasupra
chepengului; t
02
- timpul necesar pentru eliberarea de legturi a ncrcturii; t
03
- timpul
de rotire al vinciului pentru deplasarea pe orizontal a crligului gol din dreptul
chepengului, n afara bordului, pn la locul n care se afl ncrctura; t
04
- timpul
necesar pentru legarea ncrcturii.
Pentru reducerea timpului de ncrcare a navei se poate lucra consecutiv cu dou
vinciuri la acelai chepeng. n figura 6.7 se prezint graficul lucrului consecutiv a dou
vinciuri.
n acest regim de lucru, pentru fiecare din cele dou vinciuri, momentele statice i
timpii de lucru i de pauz sunt aceleai ca n cazul precedent.
Funcionarea cu dou vinciuri cuplate la un singur crlig. Procedeul de lucru a
fost prezentat n paragraful 6.1, iar modul de amplasare a celor dou vinciuri este
prezentat n figura 6.2.
Graficul de lucru pentru funcionarea mpreun a celor dou vinciuri este
prezentat n figura 6.8.
Notaiile folosite n figura 6.8 reprezint: t
1
- timpul de ridicare a ncrcturii de ctre
primul vinci (al doilea lucreaz n gol i i recupereaz din parma de traciune); t
2
- timpul
de transferare a sarcinii din bord pn deasupra locului chepengului efectuat de al doilea
vinci care trage (primul vinci fileaz parma, ncrctura trece treptat de la primul vinci la al
doilea vinci); t
3
- timpul coborrii ncrcturii n cal de ctre al doilea vinci (primul vinci
lucreaz n gol); t
03
- timpul eliberrii legturilor ncrcturii; t
4
- timpul vinci la al doilea
vinci); t
3
- timpul coborrii ncrcturii n vinci cal de ctre al doilea (primul vinci lucreaz n
gol); t
03
- timpul eliberrii legturilor ncrcturii; t
4
timpul ridicrii crligului gol de ctre
vinciul doi (primul vinci recupereaz fr efort propria parm); t
5
- timpul transferrii
crligului gol de la nav la mal de ctre vinciul 1 (vinciul 2 fileaz parma); t
6
- timpul de
coborre al crligului gol ctre primul vinci (al doilea vinci fileaz parma proprie); t
06
-
timpul de legare a ncrcturii.
265
Fig. 6.6 Graficul de lucru cu un singur vinci
Fig. 6.7 Graficul lucrului consecutiv a dou vinciuri
266
Fig. 6.8 Graficul funcionrii mpreun a dou vinciuri
Analiza graficelor de lucru a vinciurilor de ncrcare arat c regimurilor de lucru
le corespund un numr mare de porniri i opriri i, de asemenea, c n cea mai mare parte
din durata unui ciclu motorul lucreaz n regim de mers n gol.
Calculul vinciului de ncrcare se face pentru regimul cel mai greu, n care
lucreaz un singur vinci. Atunci cnd lucreaz dou vinciuri cuplate la acelai crlig,
regimul de lucru al unui vinci este mai uor ntruct sarcina pe durata unui ciclu se mut
de la un vinci la cellalt.
Pentru funcionarea cu un singur vinci durata relativ de funcionare este:
% 100
T
t
% DA
n care: t = t
1
+ t
2
+ t
3
+ t
4
, reprezint timpul de lucru n cadrul ciclului cu durata total T.
Regimurile de funcionare a vinciurilor de ncrcare i macaralelor sunt asigurate de
motoare electrice cu serviciul intermitent de funcionare DA=25% pentru regim uor de
lucru sau DA=40% pentru regim greu de lucru.
Pentru unele vinciuri, la care ciclurile nu se repet, de exemplu vinciurile pentru
ridicarea alupelor, brcilor de salvare sau scara de bord, motorul electric de acionare se
alege din categoria celor cu funcionare de scurt durat.
n perioada de funcionare a vinciului, de exemplu la ridicarea ncrcturii, timpul
t
1
se compune din:
t
1
= t
1a
+ t
1s
+ t
1f
n care: t
1a
- este timpul de accelerare; t
1s
- timpul de funcionare n regim staionar cu
vitez constant; t
1f
- timpul de frnare.
n acelai mod se calculeaz i celelalte durate de funcionare: t
2
, t
3
i t
4
.
n figura 6.9 se prezint graficul de variaie a vitezei n funcie de timp la
ridicarea ncrcturii.
(6.10)
(6.11)
267
Fig. 6.9 - Graficul v = f(t) la ridicarea ncrcturii
Pentru construcia graficului 6.9 s-a aproximat c n perioadele tranzitorii de
accelerare i de frnare variaia vitezei este liniar. Suprafaa trapezului din figur
reprezint nlimea de ridicare H. Din grafic rezult:
a s f
v v
H t v t t
1 1
1 1 1 1
2 2
+ +
nlimea parcurs pe duratele accelerrii i frnrii este:
( )
a f
v
H t t
1
1 1 1
2
+
Din relaiile (6.12) i (6.13) rezult timpul de funcionare n regim staionar:
s
H H
t
v
1
1
1
Durata regimurilor tranzitorii de accelerare t
1a
i de frnare t
1f
se deduc din
ecuaia fundamental a micrii. Din aceasta rezult:
e
s
GD dn
dt
M M
2
375
Considernd constante cuplurile M i M
s
n perioada regimului de accelerare i
integrnd ecuaia n limitele de la starea iniial t = 0, n
i
= 0 la starea final considerat la
terminarea perioadei de accelerare, t = t
1a
, n
f
= n
1
, rezult pentru timpul de accelerare
expresia:
(6.12)
(6.13)
(6.14)
(6.15)
268
e
a
d
GD n
t
M
2
1
1
1
375
Procednd n acelai mod se determin i timpul de frnare, schimbndu-se datele
iniiale.
Timpii deplasrii pe orizontal a ncrcturii, t
01
, i a crligului gol, t
03
, se pot
determina lund n considerare viteza unghiular de rotire sau viteza linear de deplasare
pe orizontal.
n primul caz, rotirea se execut de obicei cu viteza unghiular = 6 - 18
[rad/s.],pentru unghiuri maxime = 120 - 180. Mrimea unghiului de rotire depinde de
locul de dispunere a vinciului sau macaralei pe punte fa de chepenguri.
n al doilea caz, pe baza datelor de exploatare se adopt pentru viteza linear de
deplasare pe orizontal valorile: 0,6 [m/s] pentru deplasarea cu ncrctur i 1 [m/s] pentru
deplasarea crligului gol. Distana de deplasare pe orizontal se consider, n funcie de
dimensiunile navei, l = 0,75B [m], n care B [m] reprezint limea navei. Cu aceste valori i
lund n considerare i duratele de accelerare i frnare, pentru timpii de deplasare pe
orizontal, rezult:
deplasarea cu ncrctur, t
01
= (1,25B + 5) [s];
deplasarea crligului gol, t
03
= (0,75B + 2) [s].
Timpul de dezlegare a sarcinii, t
02
i timpul de legare a sarcinii, t
04
, nu pot fi
determinai din datele acionrii vinciurilor sau macaralelor. Aceti timpi depind de
organizarea lucrului, mijloacele de mic mecanizare i numrul persoanelor care particip
la aceste operaiuni, precum i de felul mrfurilor. Timpii acestor operaiuni se determin
practic prin cronometrare pentru mai multe situaii concrete.
Pentru mrfurile generale, suma timpilor de legare i dezlegare a ncrcturii,
determinat experimental, reprezint: t
02
+ t
04
= 80 - 110 s.
6.5 Alegerea puterii motorului electric de acionare. Exemplul de calcul
Alegerea puterii motorului electric de acionare a instalaiei de ncrcare
descrcare se efectueaz n funcie de datele stabilite iniial.
Se consider cunoscute sarcina nominal, vitez nominal de ridicare i celelalte
date enumerate n exemplul de calcul, iar mecanismul de transmisie a fost ales n
prealabil.
n cazul motorului de acionare a vinciului de ncrcare descrcare cu bigi de
marf, a crui diagram de sarcin M = f(t) este prezentat n figura 6.6 se procedeaz
astfel:
1. Pe baza datelor tehnice ale mecanismului se determin puterea static de ridicare
a sarcinii nominale, n funcie de care se face alegerea preliminar a motorului de
acionare din catalogul de motoare destinate serviciului intermitent,
corespunztor unei durate relative de acionare DA = 40% n cazul unui regim de
lucru intens, respectiv DA = 25% n cazul unui regim de lucru uor;
2. Pentru motorul electric ales se scoate din catalog, sau se calculeaz caracteristica
mecanic natural n = f(M);
(6.16)
269
3. Se calculeaz sub form tabelar i se construiete diagrama exact de sarcin a
motorului lundu-se n considerare i procesele tranzitorii;
4. Se verific motorul electric ales din punct de vedere al productivitii impuse;
5. Se verific motorul electric ales la nclzire prin metoda cuplului sau curentului
echivalent.
EXEMPLU DE CALCUL
Sarcina nominal (masa) Q
N
= 3 [t]
Masa crligului gol q = 60 [kg]
Diametrul de calcul al tamburului D
T
= 0,5 [m]
Randamentul total al mecanismului n
N
= 0,8
Coeficientul de transmisie total i = 44
Viteza de ridicare a sarcinii nominale V
n
= 50 [m/min]
Viteza de aezare a sarcinii nominale V
a
8 [m/min]
nlimea de ridicare h = 15 [m]
Numrul de cicluri impuse ntr-o or Z=15
Sursa de alimentare 3*380[V]; 50[H
z
].
I. Alegerea preliminar a motorului electric
1. Cuplul static la axul motorului electric la ridicarea sarcinii nominale:
M
1
=
N T
N
, (Q q)D
i
9 81
2
+
=
2 8 , 0 44
5 , 0 ) 60 3000 ( 81 , 9
+
=213,2[Nm]
2. Cuplul static la axul motorului electric la coborrea sarcinii nominale:
M
2
= )
1
2 (
2
) ( 81 , 9
N
T N
i
D q Q
+
M
2
= )
8 , 0
1
2 (
44 2
5 , 0 ) 60 3000 ( 81 , 9
+
=127,9 [Nm]
3. Turaia la arborele motorului electric, pe treapta de turaie ridicat, necesar pentru
asigurarea vitezei impuse de ridicarea sarcinii nominale.
n=
T
N
D
i V
=
5 , 0 14 , 3
44 50
=1400 [rot/min]
n care V
N
se introduce n [ m/min]
270
4. Turaia la arborele motorului electric, pe treapta de turaie cobort, necesar pentru
asigurarea vitezei impuse de aezare a sarcinii.
5 , 0 14 , 3
44 8
T
a
a
D
i V
n 244 [rot/min]
n care V
a
se introduce n [m/min]
5. Puterea de calcul la ridicarea sarcinii nominale pe treapta de turaie ridicat:
P
1
=
9550
1400 2 , 213
9550
1
n M
31,25[kw]
6. Puterea de calcul la coborrea sarcinii nominale pe treapta de turaie cobort:
P
2
=
9550
244 9 , 127
9550
2
n M
3,0[kw]
7. Se alege un motor asincron de tip MA-611-4/12/24, cu trei trepte de vitez cu rotorul
in scurtcircuit, avnd trei nfurri statorice distincte n conexiunea stea, parametrii
nominali fiind indicai n tabelul 6.2:
Cuplul nominal al motorului pe treapta a treia de vitez va fi:
1435
32
9550 9550
N
N
N
n
P
M 219,9 [Nm]
n care P
N
se introduce n [kW], iar n
N
n [rot/min]
Caracteristica mecanic natural corespunztoare treptei de turaie ridicat, luat din
catalog, se prezint n fig. 6.10.
Fig.6.10
271
Tabelul 6.2
Parametrii motorului
Treapta de vitez
I II III
Numrul de poli 2p 24 12 4
Puterea nominal P
n
[kw] 5 13 32
Turaia nominal n
n
[rot/min] 195 430 1435
Curentul nominal I
1N
[A] 51 38,5 59
Curentul de pornire I
p
[A] 70 115 470
Cuplul critic M
k
[Nm] 520 588 814
Cuplul de pornire M
p
[Nm] 520 569 618
Randamentul nominal
N
0,33 0,68 0,87
Factorul de putere cos 0,45 0,75 0,95
Durata relativ de acionare DA[%] 15 25 40
Momentul de volant GD
2
M
[Nm
2
] 55,3
Tensiunea nominal U
1n
[V] 380
Gradul de protecie I.P. 56
II. Calculul diagramei reale de sarcin ( ) t f I
Ridicarea sarcinii nominale
8. Momentul de volant echivalent raportat la arborele motorului electric se obine n baza
relaiei:
2
,
_
+
V
m J J
m e
[Nms
2
], n care =1,11,3
innd seama de relaiile:
GD
e
2
= 4gJ
e
; GD
M
2
= 4gJ
M
; m = Q
N
+q
se obine:
GD
e
2
= GD
M
2
+ 4g(Q
N
+ q)(
n
V
2
)
2
[Nm
2
] ,unde v[m/min] i n [rot/min]
Rezult deci:
GD
e
2
=1,255,3+49,81(3000+60)
,
_
2
1435 14 , 3 2
50
70,06 [Nm
2
]
9. Cuplul dinamic la accelerare:
M
1
d = M
p
- M
1
=618 213,2 = 404.8[Nm]
10. Timpul de accelerare (pornire):
375
1432
375
06 . 70
375
1
1
2
1
d
e
a
M
n GD
t 0.7 [s]
272
unde turaia n
1
=1432 [rot/min] se citete din caracteristica mecanic natural
n = f(M) corespunztoare cuplului: M
1
= 213,2 [Nm]
11. Motorul ales este prevzut cu frn electromagnetic de tip TMT-6, avnd
M
f
=441[Nm].
12. Pierderile constante ale motorului se determin din condiia ca la sarcin nominal,
pierderile constante p
k
s fie egale cu cele variabile p
v
.
,
_
,
_
1
87 . 0
1
2
32
1
1
2
N
N
k
P
p 2,4 [kw]
13. Cuplul de frnare (pierderi) determinate de pierderile constante din motor:
k
fM
p ,
M
n
1
2 4
9550 9550
1435
16 [Nm]
14. Cuplul de frnare (rezistent) total:
M
tf
= M
1
+ M
f
+ M
fM
= 213,2 + 441 + 16 = 670,2 [Nm]
15. Timpul de frnare la ridicarea sarcinii nominale, n cazul decuplrii motorului de la
reea:
t
1f
=
375
2
e
GD
tf
n
M
1
=
2 , 670
1435
375
06 . 70
0,4 [s]
16. Viteza n regim staionar la ridicarea sarcinii nominale:
44
1435 5 , 0 14 , 3
1
1
i
n D
V
T
51,12[m/min]
17. nlimea parcurs de sarcin la pornire i frnare:
H
1
=
v
1
2 60
(t
1a
+t
1f
) = ( ) +
4 , 0 7 , 0
60 2
12 , 51
0,47 [m]
18.Timpul de ridicare a sarcinii n regim staionar:
t
1s
=
v
H H
1
60
12 , 51
47 , 0 15
17,1 [s]
19. Curentul absorbit de motor, admind proporionalitatea ntre curent i cuplu, va fi:
I
1
= I
1N
N
M
M
1
=
9 , 212
2 , 213
59
59,1
[A]
Coborarea cu frnare a sarcinii nominale
20. Considernd maina funcionnd pe poriunea liniar a caracteristicii mecanice
naturale n = f(M), valabil n cazul sarcinilor aflate n limitele admise de puterea
motorului, turaia de la care ncepe frnarea cu recuperare de energie va fi:
n
B
= n
2
= n
0
+ (n
0
- n
s
) [rot/min]
n
2
= 2n
0
- n
s
[rot/min]
273
Fig. 6.11
unde n
s
=1461[rot/min] se determin din caracteristica mecanic natural n = f(M), trasat
n figura 6.10, corespunztor cuplului M
2
= 127,9 [Nm].
Rezult deci:
n
2
= 21500-1461=1539 [rot/min]
21. Curentul debitat de main n regim de frnare cu recuperare de energie,
corespunztor cuplului M
2
, va fi:
I
2
= I
1N
N
M
M
2
=
9 , 212
9 , 127
59 35,4
[A]
22. Timpul de accelerare, de la turaia n = 0 la n = n
2
, la coborrea sarcinii nominale n
regim de frnare cu recuperare de energie:
t
2a
=
375
2
e
GD
2
2
M M
n
P
+
+
9 , 127 618
1539
375
06 , 70
0,4 [s]
23. Cuplul de frnare la coborrea sarcinii nominale, n cazul decuplrii mainii de la
reea:
M
2f
= M
f
+ M
fM
- M
2
= 441 + 16 -127,9 = 329,1 [Nm]
24. Timpul de frnare la coborrea sarcinii cu maina decuplat de la reea:
t
2f
=
375
2
e
GD
f
M
n
2
2
1 , 329
1539
375
06 , 70
0,9 [s]
25. Viteza de coborre a sarcinii:
v
2
=
44
1539 5 , 0 14 , 3
2
i
n D
T
55 [m/min]
26. nlimea parcurs de sarcin la accelerare i frnare:
H
2
=
2
2
V
(t
2a
+ t
2f
) ( ) 6 , 0 9 , 0 4 , 0
60 2
55
+
[m]
27. Timpul de coborre a sarcinii n regim staionar:
t
2s
=
2
2
H H
60 7 , 15 60
55
6 , 0 15
[s]
274
Ridicarea crligului gol
28. Cuplul de sarcin la axul motorului electric la ridicarea crligului gol:
M
3
= 3 , 22
15 , 0 44 2
5 , 0 60 81 , 9
2
81 , 9
0
i
D q
T
[Nm],
unde
0
= 0,15 se citete n fig. 1.7 - pentru q/Q
N
= 0,02, sau se calculeaz cu relaia (1.13).
29. Cuplului de sarcin M
3
= 22,3 [Nm] i corespunde din caracteristica mecanic
( ) M f n turaia n
3
=1486.
30. Momentul de volant echivalent raportat la arborele motorului electric:
[ ]
2 2 2
36 , 66 3 , 55 2 , 1 Nm
M eo
GD GD
31. Cuplul dinamic la accelerare:
M
3d
= M
p
- M
3
= 618 - 22,3 = 595,7 [Nm]
32. Timpul de accelerare la ridicarea crligului gol:
t
3a
=
375
2
0 e
GD
d
M
n
3
3
44 , 0
7 , 595
1486
375
36 , 66
[s]
33. Cuplul de frnare (rezistent) total:
M
3f
= M
3
+ M
f
+ M
fM
= 22,3 + 441 + 16 = 479,3 [Nm]
34. Timpul de frnare la ridicarea crligului gol, n cazul decuplrii motorului de la reea:
t
3
f =
375
2
0 e
GD
f M
n
3
3
55 , 0
3 , 479
1485
375
36 , 66
[s]
35. Viteza de ridicare a crligului gol:
V
3
=
i
n D
T
55
44
1486 5 , 0 14 , 3
[m/min]
36. nlimea parcurs de crlig la accelerare i frnare:
H
3
=
2
3
V
(t
3a
+ t
3f
) ( ) 44 , 0 55 , 0 44 , 0
60 2
53
+
[m]
37. Timpul de ridicare a crligului gol n regim staionar:
t
3s
=
3
3
V
H H
60 5 , 16 60
53
44 , 0 15
[s]
38. Curentul absorbit de motor la ridicarea crligului gol, se calculeaz cu relaia:
I
3
= I
N 2
3
2
1
1
,
_
,
_
+
s
s
s
s
k
N
k
;
n care:
s
N
=
0
0
n
n n
N
043 , 0
1500
1435 1500
275
- turaia de sincronism n
0
=1500 [rot/min]
- coeficientul de suprasarcin
N
k
M
M
82 , 3
9 , 212
814
- alunecarea critic:
s
k
= s
N
(
1
2
+
) ( ) 32 , 0 1 82 , 3 82 , 3 043 , 0
2
,
_
+
- alunecarea corespunztoare cuplului de sarcin M
3
= 22,3 [Nm] este:
s
3
=
0
3 0
n
n n
0093 , 0
1500
1486 1500
nlocuind aceste valori n expresia curentului statoric se obine:
I
3
= 59
2
2
0093 , 0
32 , 0
1
043 , 0
32 , 0
1
,
_
,
_
+
= 12,8 [A]
OBSERVAIE: La sarcini mai mici, nu mai poate fi admis proporionalitatea ntre
curent i cuplu, motiv pentru care curentul absorbit de motor se calculeaz cu relaia
(2.71) sau (2.72).
Coborrea forat a crligului gol
39. Cuplului de sarcin la arborele motorului electric la coborrea crligului gol:
M
4
= 6 , 15
15 , 0
1
2
44 2
5 , 0 60 81 , 9 1
2
2
81 , 9
0
,
_
,
_
i
D q
T
[Nm]
Observaie: semnul minus al cuplului M
4
indic necesitatea coborrii n for a crligului
gol.
40. Cuplul de sarcin M
4
=15,6 [Nm] i corespunde din caracteristica mecanic
( ) M f n turaia: n
4
=1491 [rot/min]
41. Cuplul dinamic la accelerare:
M
4d
= M
p
- M
4
= 602,4[Nm]
42. Timpul de accelerare la coborrea crligului gol:
t
4a
=
375
2
0 e
GD
d
M
n
4
4
44 , 0
4 , 602
1491
375
36 , 66
[s]
43. Cuplul de frnare (rezistent) total:
M
4f
= M
4
+ M
f
+ M
fM
= 15,6 + 441 + 16 = 472,6 [Nm]
44. Timpul de frnare la coborrea crligului gol n cazul deconectrii motorului de la
reea:
t
4f
=
375
2
0 e
GD
f
M
n
4
4
56 , 0
6 , 472
1491
375
36 , 66
[s]
45. Viteza de coborre a crligului gol:
276
V
4
= 3 , 53
44
1491 05 14 , 3
4
i
n D
T
[m/min]
46. nlimea parcurs de crligul gol la accelerare i frnare:
H
4
=
2
4
V
(t
4a
+ t
4f
) ( ) 44 , 0 56 , 0 44 , 0
60 2
3 , 53
+
[m]
47.Timpul de coborre a crligului n regim staionar:
t
4s
= 4 , 16 60
3 , 53
44 , 0 15
4
4
V
H H
[s]
48. Curentul absorbit de motor la coborrea crligului gol:
I
4
= I
N
2
3
2
1
1
,
_
,
_
+
s
s
s
s
k
N
k
= 59
2
2
006 , 0
32 , 0
1
043 , 0
32 , 0
1
,
_
,
_
+
= 8,3 [A]
n care s
4
, aluncarea corespunztoare cuplului de sarcin M
4
=15,6 [Nm], este:
006 , 0
1500
1491 1500
0
4 0
4
n
n n
s
49. Datele calculului sunt trecute n tabelul 6.3.
Cu ajutorul datelor din tabelul 6.3 se construiete diagrama exact de sarcin I = f(t)
prezentat n figura 6.12.
Tabelul 6.3
Regimul de lucru Curentul [A] Timpul[s]
Ridicarea sarcinii
nominale
Accelerare I
p
= 470 t
1a
= 0,7
Regim staionar I
1
=59,1 t
1s
=17,1
Frnare - t
1f
=0,4
Deplasarea pe orizontal a sarcinii t
a
=20
Coborrea cu frnare a
sarcinii nominale
Accelerare I
p
=470 t
2a
=0,4
Regim staionar I
2
=35,4 t
2s
=15,7
Frnare - t
2f
=0,9
Eliberarea crligului t
a2
=60
Ridicarea crligului gol Accelerare I
p
=470 t
3a
=0,44
Regim staionar I
3
=12,8 t
3s
=16,5
Frnare - t
3f
=0,55
Deplasarea pe orizontala a crligului gol t
a3
=20
Coborrea forat a
crligului gol
Accelerare I
p
=470 t
4a
=0,44
Regim staionar I
4
=8,3 t
4s
=16,4
Frnare - t
4f
=0,56
Agarea sarcinii n crlig t
a4
=60
277
III. Verificarea motorului din punct de vedere al productivitii
50. Durata unui ciclu: t
c
=
+
4
1
0
4
1
i i
t t
[s] unde :
t
1
= t
1a
+ t
1s
+ t
1f
= 0,7 + 7,1 + 0,4 = 18,2 [s]
t
2
= t
2a
+ t
2s
+ t
2f
= 0,4 + 15,7 + 0,9 = 17,0 [s]
t
3
= t
3a
+ t
3s
+ t
3f
= 0,44 + 16,5 + 0,55 = 17,49 [s]
t
4
= t
4a
+ t
4s
+ t
4f
= 0,44 + 16,4 + 0,56 = 17,4 [s]
Rezult deci:
4
1
i
t
t
1
+ t
2
+ t
3
+ t
4
= 18,2 + 17 + 17,49 + 17,4 = 70,09 [s]
4
1
0i
t =t
01
+ t
02
+ t
03
+ t
04
= 20 + 60 + 20 + 60 = 160 [s]
respectiv: t
c
= 70,09 + 160 = 230,09 [s]
278
Fig. 6.12
n
d
i
a
g
r
a
m
a
d
e
s
a
r
c
i
n
,
d
i
n
f
i
g
u
r
a
6
.
1
2
s
-
a
c
o
n
s
i
d
e
r
a
t
o
v
a
r
i
a
i
e
l
i
n
i
a
r
a
c
u
r
e
n
t
u
l
u
i
n
p
e
r
i
o
a
d
e
l
e
d
e
a
c
c
e
l
e
r
a
r
e
,
f
a
p
t
a
d
m
i
s
i
b
i
l
d
a
t
o
r
i
t
t
i
m
p
i
l
o
r
d
e
a
c
c
e
l
e
r
a
r
e
f
o
a
r
t
e
m
i
c
i
.
279
51. Numrul de cicluri ntr-o or:
Z
c
=
c
t
3600
15 65 , 15
09 , 230
3600
> z
Se observ c motorul corespunde din punct de vedere al productivitii, numrul de
cicluri rezultat din diagrama exact de sarcin Z
c
, fiind mai mare dect cel impus iniial: Z
=15
IV. Verificarea motorului ales la nclzire
52. Durata relativ de acionare real:
100
10
100
) (
4
1
4
1
4
1
if i
c
is ia
r
t t
t
t t
DA
( )
100
09 , 230
41 , 2 09 , 70
100
09 , 230
56 , 0 55 , 0 9 , 0 4 , 0 09 , 70
+ + +
r
DA
4 , 29 100
09 , 230
68 , 67
r
DA [%]
53. Curentul echivalent se calculeaz pe baza datelor din tabelul 6.3 sau diagrama de
sarcin (fig. 6.12) cu ajutorul relaiei de mai jos, n care =0,5, pentru motoare electrice
asincrone:
( )
..... .......... .
2 2
4 3 2 1 4 3 2 1
2
2
2 2
2
2
1
2
1 1
2
1
+
+ + + + + + +
+
,
_
+
+ +
,
_
s s s s a a a a
s a
p
s a
p
e
t t t t t t t t
t I t
I I
t I t
I I
I
( )
s s s s a a a a
s a
p
s a
p
t t t t t t t t
t I t
I I
t I t
I I
4 3 2 1 4 3 2 1
4
2
4 4
2
4
3
2
3 3
2
3
2 2
......
+ + + + + + +
+
,
_
+
+ +
,
_
+
+
.........
) 44 , 0 44 , 0 4 , 0 7 , 0 ( 5 , 0
7 , 15 4 , 35 4 , 0
2
4 , 35 470
1 , 17 1 , 59 7 , 0
2
1 , 59 470
2
2
2
2
+ + + +
+ +
,
_
+
+ + +
,
_
e
I
2
1
2
2
2
2
4 , 16 5 , 16 7 , 15 1 , 17
4 , 16 3 , 8 44 , 0
2
3 , 8 470
5 , 16 8 , 12 44 , 0
2
8 , 12 470
........
1
1
1
1
1
]
1
+ + + +
+
,
_
+
+ + +
,
_
+
+
280
7 , 65 99 , 0
8 , 1129 8 , 25164 4 , 2703 5 , 25640 6 , 19674 9 , 25542 1 , 59727 7 , 48990
+
+ + + + + + +
e
I
] [ 9 , 55
69 , 66
8 , 208573
A I
e
54. Curentul nominal corectat corespunztor duratei de acionare reale, n baza relaiei
(2.68):
N
NC NS
r
DA
I I
DA
,
,
,
0 4
0 93 59 64
0 294
[A],unde =0,93 se ia din tabelul 2.5.
53. Se verific relaia: I
e
= 56 [A] I
NC
= 64 [A]
Aa cum se observ, motorul ales corespunde i din punct de vedere al nclzirii, cu
aceast alegerea i verificarea motorului electric de acionare a vinciului de marf este
ncheiat.
6.6 Scheme electrice de comand a acionrii instalaiilor de ncrcare descrcare
6.6.1 Scheme electrice de comand cu controler
Schemele de comand cu controler se folosesc pentru sarcini i puteri mici ale
motorului de acionare corespunztoare unor vinciuri de ncrcare cu productivitate mic.
Pentru deservirea lor este necesar personal calificat. La manevrarea controlerului de
comand operatorul depune eforturi fizice relativ mari care l obosesc. Un alt dezavantaj
al lor l constituie uzura ntr-un timp relativ scurt a pieselor de contact ale controlerului,
care sunt supuse pe timpul exploatrii unor solicitri mecanice i electrice mari.
n figura 6.13 este reprezentat schema electric de comand cu controler a
vinciului de ncrcare acionat cu motor asincron n scurtcircuit cu dou trepte de vitez.
Funcionarea schemei electrice de comand se nelege urmrindu-se tabelul cu
nchiderea contactelor controlerului de comand i nu necesit explicaii suplimentare.
Pentru protecia la suprasarcin n schem se prevd releele termice et, iar pentru
limitarea deplasrii sunt folosite contactele limitatoarelor de curs LC1 i LC2. Protecia
la tensiune minim sau nul este realizat de bobina contactorului C.
281
Figura 6.13
6.6.2 Scheme electrice de comand cu relee i contactoare
Schemele electrice de comand cu relee i contactoare cunosc o larg rspndire
i sunt folosite frecvent la navele de mrfuri de diferite tonaje.
Folosirea schemelor electrice cu relee i contactoare permite realizarea
controlului automat al acceleraiei la pornire i frnare, folosirea integral a puterii
motorului la pornire i frnare, prentmpinarea suprasarcinilor prin comutare automat
pe treptele inferioare de vitez.
Aceste scheme ofer posibilitatea conducerii de la distan i a dispunerii ct mai
potrivit a controlerului de comand pentru urmrirea i conducerea operaiunilor de
ncrcare.
Schemele cu relee i contactoare prezint siguran mare n exploatare i pentru
deservirea lor nu este necesar personal cu calificare deosebit. Nu necesit revizii i
reparaii dese i sunt rare cazurile de avarie.
Acionarea electric cu motor asincron cu dou viteze
n figura 6.14 se prezint schema electric de comand cu relee i contactoare a
vinciului de ncrcat acionat cu motor asincron n scurtcircuit cu dou viteze.
Schema electric se compune din urmtoarele elemente:
m - motor asincron cu rotor n scurtcircuit. Pe stator sunt dispuse dou nfurri
cu numere de poli diferite, corespunztoare pentru viteza mic i viteza mare;
C1, C2 - contactoare de sens, respectiv pentru ridicare sau coborre;
282
C3 - contactor de linie;
d1, d2 - relee de control a accelerrii. Menin armtura atras 2,5 secunde dup
ntreruperea tensiunii de alimentare a bobinei releului;
d3 - releu de frnare. i elibereaz armtura cu ntrziere de 2,5 secunde de la
ntreruperea alimentrii;
et1 - et3 - relee termice pentru protecie la suprasarcin. Pentru o depire a sarcinii
100% I
n
acioneaz dup 100 secunde, iar pentru o depire de 500% I
n
acioneaz
dup 15 secunde;
LC1, LC2 - limitatori de curs;
b(3-3)-b(12-12) - contactele controlerului de comand.
Cu controlerul pe poziia zero, la aplicarea tensiunii de la reea sunt alimentate
releele d1 i d2 care i acioneaz fr temporizare contactele. Prin nchiderea contactelor
d1 (2-4), d2 (2-4) este untat contactul b(3-3) i pe celelalte poziii ale controlerului,
alimentarea schemei de comand se menine prin aceste contacte.
Schema are o funcionare simetric pe cele dou poziii, aa nct este suficient
prezentarea funcionrii, de exemplu pe poziiile de ridicare.
Pe poziia 1 Ridicare se deschide contactul b(3-3) i sunt nchise contactele
b(5-5), b(7-7), b(12-12). Este alimentat comutatorul C1 i prin contactul C1 (2-4) este
alimentat i contactorul C3. Prin deschiderea contactului C1 (7-9) se ntrerupe
alimentarea releului de timp d1. Motorul pornete cu viteza mic rotindu-se n sensul de
ridicare a greutii. Dup scurgerea timpului de ntrziere al releului d1, se nchide contactul
d1 (3-5) permind trecerea pe treapta urmtoare de vitez.
Pe poziia 2 Ridicare se nchide contactul controlerului b(9-9) i este alimentat
contactorul C4. Prin aciunea contactelor C4 se deconecteaz nfurarea de vitez mic i
se conecteaz nfurarea de vitez mare.
Funcionarea pe poziiile de coborre este identic cu deosebirea c n locul
contactorului C1 i releului d1, acioneaz contactorul C2 pentru inversarea sensului de
rotaie i releul d2.
Releele de accelerare d1, d2, asigur o pornire uoar i o acceleraie moderat prin
meninerea automat, o anumit durat, pe treapta de vitez mic.
Releul de frnare d3 este alimentat n poziia 2 a controlerului, atunci cnd
motorul funcioneaz cu vitez mare i deschide contactul d3 (3-5). La revenirea
controlerului pe poziia zero se ntrerupe alimentarea releului d3, ns contactul acestuia
se nchide cu ntrziere. Pe durata ntrzierii la nchidere a contactului d3 (3-5) este
interzis o nou pornire. Aceast ntrziere este necesar pentru ca motorul sub aciunea
frnei electromagnetice s se opreasc. n absena releului d3 ar fi posibil
contraconectarea motorului nsoit de ocuri mari de cureni n reea i ocuri mecanice
asupra ncrcturii.
Protecia la suprasarcin este asigurat de releele termice et1 - et3 iar protecia la
tensiune minim este realizat de bobina contactorului C3.
Schema prezentat n figura 6.14 se folosete pentru vinciuri de ncrcare cu
sarcina nominal mic, iar la macarale de puteri medii este utilizat pentru acionarea
mecanismelor de rotire i de nclinarea braului.
283
Fig. 6.14 Schema electric de comand cu relee i contactoare a vinciului de ncrcat acionat cu motor
asincron n scurtcircuit cu dou trepte de vitez
Acionarea electric cu motor asincron cu trei viteze
O astfel de schem de acionare este prezentat n figura 6.16.
Schema se folosete pentru acionarea electric a vinciurilor de ncrcare de 3-5 t.
Motorul asincron cu rotorul n scurtcircuit cu trei viteze are urmtoarele caracteristici
tehnice: numrul de poli 2p = 4/8/32, puterea nominal corespunztoare celor trei
nfurri independente 45/22/4,5 kw, durata relativ de funcionare, DA = 20/10/10%,
turaia nominal n
n
= 160/700/1430 rot/min. Ventilaia motorului este independent i
284
asigurat de un electroventilator care menine constant fluxul aerului de rcire indiferent
de turaia motorului, ct i pe durata pauzelor din cadrul ciclului de ncrcare.
Caracteristicile mecanice ale acionrii sunt prezentate n figura 6.15.
Celor trei trepte de turaii ale motorului le corespund urmtoarele viteze pentru
ridicarea ncrcturii nominale a vinciului: viteza mare 1,3 m/s, viteza medie 0,65 m/s i
viteza mic 0,15 m/s.
Elementele componente ale schemei sunt:
m1 - motor asincron cu trei viteze;
m2 - motor electric pentru ventilaie independent;
C1, C2 - contactoare de sens;
C3, C4, C5 - contactoare de accelerare;
C6 - contactor pentru cuplarea electroventilatorului;
C7 - contactor de frnare;
d1 - releu de tensiune minim;
d2, d3 - relee de accelerare;
d4, d5 - relee de frnare;
et1 et4 - relee termice pentru protecie la suprasarcini;
m3, m4 - transformatoare;
n1, n2 - puni redresoare;
b(1-1)b(12-12) - contactele controlerului de comand.
Schema este simetric, de aceea funcionarea se descrie numai pentru regimul de
ridicare a ncrcturii.
n poziia zero a controlerului, la aplicarea tensiunii de la reea este alimentat
contactorul C6 care pornete electroventilatorul i prin contactele normal nchise ale
controlerului este alimentat releul de tensiune minim d1. Se nchide contactul d1 (6-8),
se aplic tensiunea schemei de comand i sunt alimentate releele de accelerare d2, d3.
Motorul vinciului se afl n repaus, pregtit pentru funcionare.
Pe poziia 1 Ridicare situaia contactelor controlerului de comand este
conform tabelului. Prin contactele C7 (3-5), b(4-4) este alimentat contactorul C1. Se
nchide contactul C1 (2-4) care pregtete circuitul de alimentare al contactorului C1 prin
contactul b(2-2). Prin contactele C1 (6-8), b(5-5) este alimentat contactorul C3 i prin
contactele b(8-8), C3 (2-4) este alimentat contactorul C7. Deschiderea contactului C7 (3-
5) ntrerupe circuitul de alimentare a contactorului C1 prin b(4-4), acesta continund s
fie alimentat prin circuitul C7 (6-8), b(2-2), C1 (2-4).
Contactorul C7 nchide circuitul de alimentare al bobinei frnei electromagnetice
i axul motorului este eliberat de frna mecanic.
Prin acionarea contactelor principale ale contactoarelor C1 i C3 motorul este
alimentat de la reea i funcioneaz cu turaia mic n sensul de ridicare a ncrcturii.
285
Pe aceast poziie se ntrerupe alimentarea releului d2 prin deschiderea
contactului C3 (3-5) i contactul acestuia d2 (3-5) se va nchide cu temporizare pregtind
treapta urmtoare de funcionare.
Fig. 6.15 Caracteristicile mecanice ale acionrii electrice pentru vinciul de ncrcare
acionat cu motor asincron cu trei viteze
Pe poziia 2 Ridicare se deschid contactele b(5-5), b(10-10) i se nchide
contactul b(6-6). Prin contactul b(6-6) dup expirarea timpului de ntrziere la nchidere
a contactului d2 (3-5) este alimentat contactorul C4 care ntrerupe funcionarea
contactorului C3 prin deschiderea contactului C4 (3-5) i prin nchiderea contactelor
principale conecteaz nfurarea de turaie medie. Motorul se accelereaz pn la valoarea
turaiei medie.
n acelai timp cu alimentarea contactorului C4 este alimentat i releul de frnare d4
prin dioda n3. nchiderea contactului d4 (2-4) blocheaz deschiderea contactului C3 (2-4) i
menine alimentarea contactorului C7. De asemenea, prin nchiderea contactului d4 (6-8) se
blocheaz contactul C7 (6-8).
La ntreruperea alimentrii releului d2, cu temporizare se deschide contactul d2
(2-4) i n circuitul bobinei frnei electromagnetice se introduce o rezisten pentru
consum economic i limitarea nclzirii bobinei.
Prin deschiderea contactului C4 (7-9) se ntrerupe alimentarea releului d3, care cu
temporizare nchide contactul d3 (3-5) pregtind pentru funcionare treapta urmtoare.
Pe poziia 3 Ridicare se nchide contactul b(7-7) i dup trecerea timpului de
reinere al contactului d3 (3-5) se stabilete alimentarea contactorului C5. Contactorul C5
ntrerupe alimentarea contactorului C4 prin deschiderea contactului C5 (7-9) i prin
contactele principale conecteaz nfurarea de turaie mare. Motorul de acionare se
accelereaz pn la obinerea valorii mari a turaiei.
mpreun cu contactorul C5 se alimenteaz i al doilea releu de frnare d5 i se
menine alimentarea releului d4 prin dioda n4. Se nchide contactul d5 (2-4) care unteaz
contactele b(6-6) i d2 (3-5).
Aciunea releelor de accelerare d2, d3, de fixare automat a unei durate minime de
funcionare pe treptele de vitez mic i medie, asigur o acceleraie moderat a motorului,
fr ocuri, la ridicarea ncrcturilor.
286
De asemenea, la mutarea rapid a manetei controlerului de pe poziia 3 pe poziia
zero frnarea este moderat cu ajutorul releelor de frnare d4, d5. Dup deconectarea
contactorului C5, primete alimentare contactorul C4 prin contactul d5 (2-5). Alimentarea
contactorului C4 dureaz un timp egal cu temporizarea la deschidere a contactului d5 (2-5).
Pe parcursul acestui timp motorul trece automat de la turaia mare la turaia medie. Dup
ntreruperea alimentrii contactorului C4 este ntrerupt i alimentarea releului d4. n perioada
de ntrziere la deschidere a contactului d4 (6-8), continu s fie alimentate contactoarele C1
i C3, motorul trecnd pe aceast durat la viteza minim.
ntrzierile la deschidere a releelor d4, d5 sunt, aproximativ, de 0,3 secunde,
realizndu-se o durat total pe treptele de frnare de circa 0,6 secunde. Alimentarea bobinei
frnei electromagnetice este ntrerupt imediat dup trecerea controlerului n poziia zero prin
deschiderea contactului C7 (2-4), ns ca urmare a ineriei proprii frna mecanic acioneaz
asupra axului dup circa 0,4-0,5 secunde, adic atunci cnd motorul aflat n regim de frnare
cu recuperare are turaie mic. n acest fel, aciunea frnei mecanice este uurat i se asigur
o frnare fr ocuri a motorului i a sarcinii.
Protecia motorului la suprasarcini este realizat de releele termice et1 et3.
Dup acionarea releelor et2 i et3, motorul poate lucra n continuare cu viteza mic.
Dac, ca urmare a suprasarcinii, acioneaz i releul et1, atunci motorul este decuplat de
la reea i i ntrerupe funcionarea.
287
288
Fig. 6.16 Schema electric de comand cu relee i contactoare a vinciului de ncrcat acionat cu motor
asincron n scurtcircuit cu trei viteze
289
Acionarea electric a macaralei. Caracteristicile tehnice ale motoarelor electrice
folosite n schemele care se prezint sunt date n tabelul 6.4.
Tabelul 6.4
Mecanism Tip motor electric Numr poli Puterea
[kw]
DA% Turaia
[rot/min]
MA 6 32 40 945
Ridicare 612-6/12/24 12 16 25 420
24 6 15 190
Rotire MA 6 9,5 25 920
411-6/16 16 2,5 15 305
nclinarea MA 6 9,5 25 920
braului 411-6/16 16 2,5 15 305
Pentru acionarea mecanismului de ridicare se utilizeaz un motor asincron cu trei
viteze realizate cu dou nfurri statorice din care una cu numrul de poli comutabil.
Comanda acestui motor se realizeaz cu contactoare i relee avnd o schem
asemntoare celei folosite pentru vinciul de ncrcare prezentat n figura 6.16.
Acionarea mecanismelor de rotire i nclinare a braului se face cu motoare
asincrone cu dou viteze comandate direct prin controler, avnd puterea mic.
Schema de comand a acionrii mecanismului de ridicat al macaralei este
prezentat n figura 6.17.
Elementele care compun schema sunt:
m1 - motor asincron n scurtcircuit cu trei viteze;
C1, C2 - contactoare de sens;
C3 - contactor pentru turaia mic;
C4, C41 - contactoare pentru turaia medie;
C5 - contactor pentru turaia mare;
C6 - contactor de frnare;
d1 - releu de tensiune minim;
d2, d3 - relee de accelerare;
d4 - releu de frnare;
d5 - releu pentru controlul integritii contactelor contactoarelor de turaie;
b(3-3) b(11-11) - contactele controlerului de comand.
Schema este simetric astfel nct este suficient explicarea funcionrii pe una din cele
dou poziii.
La aplicarea tensiunii, prin nchiderea ntreruptorului a, de la redresorul n sunt
alimentate releele d2, d3 i prin contactele acestora d2 (6-8), d3 (6-8) este alimentat releul
d5. Se nchid contactele d5 (6-8) din circuitul contactorului de frnare C6 i d5 (2-4) din
circuitul releului de tensiune minim d1. n situaia iniial, maneta controlerului fiind pe
poziia zero, este alimentat releul d1 i se nchide contactul d1 (2-4) prin care se unteaz
contactul controlerului b(3-3), asigurndu-se aplicarea n continuare a tensiunii de
comand dup deschiderea contactului b(3-3) pe poziiile de funcionare ale
controlerului.
Pe poziia 1 Ridicare se nchid contactele b (4-4
), b (6-6
) i b (7-7
). Sunt
alimentate contactoarele C1, C3 i C6. Se deblocheaz frna mecanic i motorul
pornete cu turaia mic. Prin deschiderea contactului C1 (7-9) se ntrerupe alimentarea
releului d2 i contactele acestuia vor fi acionate cu temporizare.
290
Pe poziia 2 Ridicare se deschide contactul b(7-7) i se nchide contactul b(8-
8). Se ntrerupe alimentarea contactorului C3 i sunt alimentate contactorele C4, C41.
Motorul este conectat pentru funcionare cu turaia medie, nfurarea comutabil este
conectat n triunghi.
n poziia 3 Ridicare se deschide contactul b(8-8) i se nchide contactul b(11-
11). Dup expirarea timpului de ntrziere al releului d2 se nchide contactul d2 (3-5) i
este alimentat contactorul C5 care conecteaz motorul pentru funcionare cu turaia mare,
dubl stea.
n figura 6.17 este prezentat schema de conexiuni a nfurrilor de pe statorul
motorului asincron.
La trecerea brusc a manetei controlerului din poziia zero n poziia 3, pentru a
evita ocul provocat de pornirea direct cu vitez mare, acioneaz protecia de pornire
incorect realizat cu releul d2 pentru sensul de ridicare i cu releul d3 pentru sensul de
coborre. Trecerea rapid a manetei din poziia zero n poziia 3 Ridicare duce la
nchiderea contactelor b(4-4), b(6-6), b(11-11). Este ntrerupt alimentarea releului d2
i ncepe temporizarea la deschidere a armturii sale. n prima etap prin contactul d2 (2-
4) sunt alimentate contactoarele C4, C41 i motorul pornete cu turaia medie. n a doua
etap, dup expirarea temporizrii releului d2, se deschide contactul d2 (2-4) i se nchide
contactul d2 (3-5). Este ntrerupt alimentarea contactoarelor C4, C41 i este alimentat
contactorul C5 i motorul va funciona cu turaia maxim. n acest fel se asigur o pornire
fr ocuri cu acceleraie moderat.
Schema este prevzut de asemenea, cu protecie la contraconectare, n cazul
mutrii rapide a manetei controlerului, de exemplu, din poziia 3 Coborre n poziia 3
Ridicare, realizat cu releele d2 i d4. n aceast situaie se deschid contactele
controlerului b(5-5), b(9-9) i se nchid contactele b(6-6), b(11-11).
La deschiderea contactului b(5-5), contactorul C2 continu s fie alimentat
pentru o anumit durat de timp prin contactul d4 (2-4). Pe aceast durat de timp prin
contactul d4 (6-8) sunt alimentate contactoarele C4, C41 i motorul pstrndu-i sensul de
rotaie iniial trece automat n regim de frnare cu recuperare, de la turaia mare la turaia
medie. Dup expirarea timpului de reinere al releului d4, motorul se oprete sub aciunea
frnei mecanice. Din acest moment primete alimentare contactorul C1 i motorul ncepe
s se accelereze, n sensul de ridicare a ncrcturii, cu reinere automat pe treapta a 2-a
de turaie, realizat de releul d2.
La mutarea rapid a controlerului din poziia 3 Ridicare n poziia 3 Coborre
se deschid contactele controlerului b(6-6), b(11-11) i se nchid contactele b(5-5), b(9-
9). n perioada de ntrziere a declanrii releului d4, motorul rmne conectat pentru
acelai sens de rotaie i se frneaz prin recuperare la trecerea automat de la turaia mare
la turaia medie i mecanic prin aciunea frnei electromagnetice. Dup expirarea timpului
de reinere al releului d4, primete alimentare contactorul C2 i motorul pornete n sens
invers, acceleraia fiind controlat de releul d3.
291
292
Fig. 6.17. Schema electric de comand cu relee i contactoare pentru mecanismul de ridicare al
macaralei acionat cu motor asincron cu trei viteze
293
Releele d2, d3, d4 asigur protecia acionrii la acceleraii i frnri brute, n
cazul mutrii rapide a manetei controlerului de comand.
Releul d5 controleaz integritatea funcionrii contactoarelor de accelerare pentru
turaiile medie i mare. Dac unul din contactoare nu lucreaz, prin contactele lui normal
deschise, este ntrerupt alimentarea releului d5 care deconecteaz alimentarea releului d1
i ntrerupe funcionarea motorului.
Protecia la suprasarcin este realizat de releele termice et1 et4.
Limitatoarele de curs LC1, LC2 limiteaz ridicarea i coborrea crligului.
Limitatorul LC3 se deschide n cazul n care greutatea ncrcturii depete valoarea
nominal.
n figura 6.18 se prezint schemele de acionare a mecanismelor de rotire i
bascularea braului macaralei.
Motoarele electrice m2, m3 de antrenare a celor dou mecanisme fiind de acelai
tip i schemele de comand a celor dou motoare sunt identice. n continuare, se prezint
funcionarea acionrii electrice pentru mecanismul de rotire.
La trecerea manetei controlerului din poziia zero n prima poziie Dreapta, se
nchid contactele b(4-4), b(8-8) i se deschide contactul b(2-2). Este alimentat
nfurarea de turaie mic i motorul funcioneaz cu aceast turaie.
La trecerea manetei controlerului pe poziia 2 Dreapta se deschid contactele
b(7-7), b(9-9), b(11-11) i se nchid contactele b(3-3), b(5-5), b(12-12). Este
alimentat nfurarea de turaie mare i motorul funcioneaz cu aceast turaie. Schema
fiind simetric, funcionarea pe poziiile Stnga este asemntoare.
Protecia la suprasarcin pentru motorul de rotire se realizeaz cu relee termice
et1 et4, iar protecia de tensiune minim prin contactorul C1. Rotirea macaralei la
dreapta este limitat de contactul LC1, iar la stnga de contactul limitatorului de curs
LC-2
Schema fiind simetric, funcionarea pe poziiile Stnga este asemntoare.
Protecia la suprasarcin pentru motorul de rotire se realizeaz cu relee termice
et1 et4, iar protecia de tensiune minim prin contactorul C1. Rotirea macaralei la
dreapta este limitat de contactul LC1, iar la stnga de contactul limitatorului de curs
LC2.
Funcionarea schemei de comand pentru motorul m3 de acionare a
mecanismului de nclinare a braului este asemntoare. Limitatoarele de curs limiteaz
deplasrile braului ntre poziiile extreme: LC3 - pentru poziia sus i LC4 pentru poziia
jos. La atingerea limitelor extreme se deschide unul din limitatoarele de curs i prin
ntreruperea alimentrii contactorului C2 motorul este deconectat de la reea.
294
Fig. 6.18. Acionarea electric pentru: a) mecanismul de rotire al macaralei;
b) mecanismul de nclinare a braului macaralei
295
ACIONAREA ELECTRIC A INSTALAIEI DE GUVERNARE
7.1 Caracterizare general, cerine i clasificri
Crma, ca element principal al instalaiei de guvernare, este destinat pentru
meninerea navei pe drumul impus i, de asemenea, pentru rotirea navei atunci cnd este
necesar schimbarea direciei de micare.
Acionarea electric sau electrohidraulic a crmei este una din cele mai
importante acionri la bordul navei.
Calitile de manevrabilitate ale navei, date n principal de instalaia de
guvernare, sunt puse n eviden n mod deosebit atunci cnd se navig n porturi,
strmtori, canale sau zone aglomerate. Pierderea posibilitii de conducere a navei, ca
urmare a ieirii din funciune a instalaiei de guvernare, constituie totdeauna o avarie
deosebit de grav care n condiii grele de navigaie, n multe situaii cunoscute, a
constituit cauza scufundrii navei.
Avnd n vedere importana instalaiei de guvernare pentru sigurana navigaiei,
regulile registrului de clasificare (R.N.R.) impun urmtoarele cerine pentru aceste
instalaii:
1. Fiecare nav trebuie s aib o instalaie de guvernare robust i sigur care
s asigure manevrabilitatea i stabilitatea de drum.
2. Instalaia de guvernare trebuie s asigure manevra de trecere a crmei de la
35 dintr-un bord la 35 n cellalt bord, cu nava la pescajul maxim i la viteza maxim
de serviciu.
3. Instalaia de guvernare trebuie prevzut cu un sistem de limitare mecanic a
micrii crmei. Unghiul de limitare acelai n ambele borduri are valoarea:
( ) ( )
o o
5 , 1 1
0 0
+ +
n care
0
este unghiul maxim al crmei la care este reglat instalaia de comand a
acionrii electrice i are valoarea de 35.
4. Comanda acionrii instalaiei de guvernare se poate face dintr-un post de
comand de la distan (timonerie) i din compartimentul crmei. n unele cazuri poate
exista i un al treilea post de comand de la distan, de rezerv, situat n alt
compartiment al navei.
5. Lng fiecare post de comand de la distan trebuie s existe indicator pentru
poziia crmei (axiometru). Indicarea poziiei crmei trebuie s fie independent de postul de
comand a acionrii instalaiei de guvernare.
6. Fiecare acionare principal, electric sau electrohidraulic a instalaiei de
guvernare trebuie s primeasc alimentare prin 2 circuite separate, conectate direct la
tabloul principal de distribuie. Unul din circuite poate primi alimentarea prin tabloul de
distribuie de avarie.
7. Dispozitivul de acionare electric trebuie s asigure:
trecerea continu a crmei dintr-un bord n altul n timp de 30 secunde, cu
crma complet imersat i viteza maxim de mar nainte corespunztoare;
296
funcionarea continu timp de 1 or la viteza de exploatare maxim nainte
i punerea penei crmei band cu un unghi care s asigure 350 de manevre ale crmei pe
or;
posibilitatea opririi motorului electric sub curent timp de 1 minut, din
starea de nclzit (numai pentru crme cu transmisie mecanic direct);
rezisten mecanic corespunztoare la efortul care apare la viteza maxim
napoi; se recomand s se asigure posibilitatea schimbrii poziiei crmei la o vitez
medie de mers napoi.
8. Sensul de rotaie al timonei sau al manetei dispozitivului de comand s
corespund cu sensul de micare a crmei. n sistemul de comand prin butoane, butoanele
trebuie s fie amplasate n aa fel nct butonul ce se afl aezat n partea dreapt s
corespund cu micarea crmei n tribord, iar butonul ce se afl la stnga s corespund cu
micarea penei crmei la babord.
9. Se admite spre instalare un pilot automat (sistem de stabilizare a drumului
navei) care s acioneze maina crmei cu ajutorul unui sistem de transmisii proprii sau
folosind pentru aceasta sistemul existent manual de acionare a crmei.
Crma, ca element principal al instalaiei de guvernare, reprezint o plac
(denumit pana crmei) imersat n ap la pupa navei. Crma se poate roti n jurul unui ax
vertical dispus n planul diametral al navei. Prin rotirea crmei cu un unghi oarecare fa
de planul diametral ntr-un bord, pe suprafaa crmei acioneaz presiunea curentului de
ap creat de micarea navei. ntruct crma este fixat prin ax de nav, presiunea pe
suprafaa crmei se transmite navei producnd un moment care rotete nava.
Pentru deplasarea crmei cu un unghi oarecare este necesar o for de o anumit
valoare. n acest scop, se folosete motorul de execuie care pe nave, de regul, este un
motor electric. Motorul electric este cuplat cu crma printr-un mecanism de transmisie
care poate fi mecanic sau hidraulic.
Acionarea electric a crmei se comand de la distan, postul de comand fiind
dispus de regul n timonerie. Comanda acionrii electrice realizeaz: deplasarea crmei
cu unghiul dat, oprirea ei, inversarea sensului de rotaie a crmei, reglarea vitezei de
rotaie .a.
Verificarea executrii comenzii date de la postul de comand const n indicarea
poziiei penei crmei fa de planul diametral i a rezultatului aciunii crmei asupra
rotirii navei. Poziia penei crmei fa de planul diametral este indicat, aa cum s-a
menionat, de axiometru, iar repetitorul girocompas sau compasul magnetic indic schimbarea
drumului navei sub aciunea deplasrii crmei.
Sistemele de acionri electrice pentru instalaiile de guvernare cunosc o larg
diversificare. Clasificarea instalaiilor de guvernare poate fi fcut dup mai multe
criterii.
1. Dup particularitile constructive ale crmei. Crma este elementul care
determin caracteristica momentului la axul crmei i regimurile posibile de lucru ale
acionrii electrice. Se realizeaz crme obinuite i crme active. Cele mai rspndite sunt
crmele obinuite care pot fi clasificate dup mai multe criterii, astfel:
* dup modul de asamblare a penei crmei cu corpul navei deosebim crme
simple, semisuspendate, suspendate;
297
* dup poziia axului fa de muchia de atac (muchia anterioar) a penei
deosebim crme necompensate, compensate, semicompensate;
* dup forma geometric a seciunii longitudinal-verticale a penei
deosebim crme de form dreptunghiular, crme de form trapezoidal, crme de alte
forme geometrice;
* dup forma seciunii longitudinal-orizontale a penei deosebim crme
plate i crme cu profil hidrodinamic.
Compensarea penei crmei se folosete pentru micorarea momentului la axul
crmei i ca urmare reducerea puterii motorului electric de acionare. Profilul
aerodinamic al crmei mbuntete caracteristicile sistemului corp nav - elice - crm
i micoreaz rezistena la naintare a navei precum i momentul la axul crmei.
2. Dup felul trasmisiei, sunt sisteme cu legtur fix ntre axul motorului
electrici axul crmei, din aceast categorie fcnd parte crmele cu acionare
electromecanic i cu legtur elastic, la care legtura ntre axul motorului electric i
axul crmei poate s lipseasc. Acestea pot fi hidraulice, pneumatice sau prin friciune,
cea mai mare rspndire avnd-o acionarea electrohidraulic.
3. Dup caracterul funcionrii motorului electric sistemele de acionare pot fi:
cu funcionare intermitent;
cu funcionare continu.
Funcionarea intermitent a motorului electric se aplic n cazul transmisiei
mecanice, iar cea continu pentru transmisia hidraulic. n regimul de funcionare
continu sunt eliminate regimurile grele de conectri repetate i de nclzire dat de
valorile mari ale curenilor de pornire, astfel nct transmisia prezint, din acest punct de
vedere, o mbuntire a condiiilor n care lucreaz motorul electric n instalaiile de
guvernare.
4. Dup nivelul de automatizare sau dup sistemul de urmrire a comenzii
acionrii electrice. Funcionarea sistemelor de acionare a crmei poate fi: simpl,
sincronizat i automat.
Funcionarea simpl. n acest caz, instalaia de guvernare reprezint un sistem
deschis (sistem de comand automat). n figura 7.1 a se prezint, n principiu, schema de
structur a unui sistem de comand automat a crmei (sistem deschis). n figura 7.1 a,
instalaia de guvernare este format din urmtoarele elemente: 1- timona de comand;
2- transmisia de comand; 3- maina crmei; 4- transmisia de for; 5- crma; 6-
transmisia de control; 7- elementul receptor al axiometrului.
n acest caz, poziia timonei determin bordul n care se deplaseaz crma i
viteza de deplasare. Poziia penei crmei nu este determinat de poziia timonei. n acest
regim de funcionare pornirea motorului electric de acionare a crmei se face manual
prin rotirea timonei ntr-unul din borduri i funcioneaz atta timp ct se menine
deplasarea timonei, iar oprirea motorului electric se face, de asemenea, manual prin
aducerea timonei n poziia zero. Pentru a urmri deplasarea crmei fa de planul
diametral se folosete aparatul indicator numit axiometru. Experiena timonierului este
foarte important deoarece trebuie s simt reacia navei, la diferite viteze i la diversele
unghiuri de bandare a crmei, astfel nct manevrele s fie scurte, iar meninerea navei pe
drumul dorit s se fac cu ct mai puine oscilaii.
Funcionarea sincronizat. n acest caz, instalaia de guvernare reprezint un
sistem nchis, mrimea de ieire fiind unghiul de bandare a crmei. n figura 7.1 b. se
prezint, n principiu, o instalaie de guvernare cu funcionare sincronizat. n fig.7.1 b.
298
deosebim: 1-timona de comand, 2-elementul de comparaie, 3-maina de crm, 4-
crma, 5-transmisia de comand, 6-transmisia de for, 7-legtura invers negativ, 8-
transmisia de control, 9-indicatorul axiometrului. n starea de repaus a instalaiei, poziia
penei crmei este determinat de poziia timonei postului de comand. Motorul electric de
acionare a crmei este pus n funciune prin rotirea timonei cu un unghi oarecare
i
n
unul din borduri i se oprete automat atunci cnd pana crmei s-a rotit cu acelai unghi
e
=
i
ca i timona. n momentul n care
e
=
i
, eroarea =
i
-
e
=0 i motorul de acionare a
crmei se oprete. Axiometrul, n acest caz, este un mijloc suplimentar de control.
Fig. 7.1 a. Fig. 7.1 b.
Funcionarea automat. Dispozitivele electrice de acionare a crmelor cu
funcionare automat asigur meninerea automat a navei pe drumul dat i schimbri
automate ale drumului conform unui program dinainte stabilit. n acest caz motorul
electric de acionare al crmei intr n funciune automat atunci cnd nava se abate de la
drumul impus i se oprete automat cnd nava a revenit la drumul dat. Aceste dispozitive
cu funcionare automat se mai numesc i girotimone deoarece sunt totdeauna cuplate
prin selsine cu girocompasul navei.
Pe navele moderne cu raioane extinse de navigaie, instalaia de guvernare permite
trecerea succesiv n cele trei regiuni. Regimul de funcionare automat se utilizeaz cnd
se navigheaz timp ndelungat pe drum constant, regimul de funcionare sincronizat
comandat de timon se aplic pentru navigaia n porturi, strmtori, canale, adic n situaii
n care schimbrile de direcie ale navei se succed la intervale scurte de timp, iar regimul de
funcionare simpl, comandat de regul prin butoane, se menine ca un sistem de rezerv.
5. Dup criterii electrice: felul curentului (curent continuu sau curent alternativ),
sisteme de alimentare (direct de la reeaua navei sau prin sistemul generator-motor),
sisteme de comand.
7.2 Calculul diagramei de sarcin
Pentru a asigura manevra navei, pana crmei trebuie s aib o suprafa A, care se
calculeaz n funcie de dimensiunile navei cu formula:
[ ]
2
m T L A
unde: L - lungimea navei ntre perpendiculare, [m];
(7.1.a)
299
T - pescajul navei, [m];
- coeficient dependent de tipul navei.
Relaia 7.1 se mai scrie sub forma:
f
LT
A [m
2
]. (7.1 b.)
Valorile coeficienilor f i , n funcie de tipul navelor sunt date n tabelul
urmtor:
Tipul navei f
Cargouri
- de tonaj redus 50-40 0,02-0,025
- cu o singur elice cu viteze medii 65-40 0,015-0,025
- cu o singur elice rapid 70-50 0,014-0,020
- cu dou elice cu o singur crm 60-50 0,016-0,020
- cu dou elice, cu dou crme 75-50 0,013-0,020
Tancuri
- mici i mijlocii 70-52 0,014-0,019
- de mare tonaj 59-45 0,017-0,022
Nave de pasageri
- mici cu viteze ponderate 59-45 0,017-0,022
- mici, rapide 59-50 0,017-0,020
Mari i mixte cu viteze moderate 62-50 0,016-0,020
Nave mari rapide 70-50 0,014-0,020
Nave de pescuit 40-22 0,025-0,045
Ferry-boat 40-25 0,025-0,040
Nave cu vele
- mici 50-40 0,020-0,025
- mari 50-35 0,020-0,050
alupe cu moto 35-20 0,030-0,050
Brci 25-18 0,040-0,055
Verificarea ariei safranului se face cu formula:
)
75 L
150
75 , 0 (
100
LT
q p A
min
+
+ [m
2
]. (7.1 c.)
unde:
p-coeficient egal cu 1,2 pentru crmele care nu lucreaz n imediata apropriere a
elicei i 1,0 pentru crmele care lucreaz lng elice.
Pe navele moderne se utilizeaz crmele cu profil hidrodinamic ntruct acest
profil asigur reducerea rezistenei la naintare a navei i a momentului necesar pentru
rotirea penei crmei.
n figura 7.2 se prezint o crm cu profil hidrodinamic. Profilul penei crmei
este caracterizat de grosimea relativ:
b
t
t
max
(7.2)
300
unde:
t
max
- reprezint cea mai mare grosime a seciunii penei crmei, [m];
b - limea (coarda) penei crmei, [m].
Grosimea maxim a profilului crmei se afl, de regul, n limitele t
max
(0,1-0,125)D,
unde D este diametrul elicei. Pentru crme obinuite valoarea coeficientului t se nscrie n
limitele t = 0,06 0,3. Se recomand ca t s se limiteze la 0,25.
O alt caracteristic important a crmei este alungirea relativ, care reprezint
raportul:
A
h
b
h
2
mned
n care h este nlimea penei crmei, [m].
De obicei, pentru crmele navelor comerciale
valoarea coeficientului este n limitele = 0,5 3, cel mai
frecvent avnd valorea = 2.
Pentru determinarea nlimii penei crmei, h la nave
maritime de deplasament mediu, se utilizeaz frecvent
relaia:
( )[ ] m 1 ... 5 , 0 T h , (7.4)
La crmele compensate, axul de rotire mparte
suprafaa penei crmei n dou pri: partea din prova, care
constituie partea compensat i partea din pupa. Gradul de
compensare este exprimat de coeficientul:
A
A
k
1
, (7.5)
unde: A
1
- suprafaa prii compensate, [m
2
];
A - suprafaa penei crmei, [m
2
].
Pentru crme de form dreptunghiular rezult:
b
b
h b
h b
k
1 1
n care b
1
este limea prii compensate. Valorile coeficientului de compensare, k se
nscriu de obicei n limitele k = 0,05 0,30. Pentru reducerea vibraiilor se recomand ca
valoarea k 0,25.
Crmele semicompensate se deosebesc de cele compensate prin aceea c partea
compensat nu ocup nlimea penei crmei.
O alt mrime care caracterizeaz profilul hidrodinamic este abscisa relativ a
grosimii maxime a profilului
b
x
x
max
max , unde x
max
corespunde ordonatei maxime a
penei crmei.
Forele care acioneaz pe pana crmei pasive. Prin rotirea penei crmei cu
unghiul fa de planul diametral al navei, curentul de ap produs la naintarea navei cu
(7.3)
Fig. 7.2 Pana crmei cu profil
hidrodinamic
(7.6)
301
viteza v ,acioneaz neuniform pe cele dou fee ale crmei i ca urmare apare o for
rezultant de presiune a apei pe pana crmei.
Fig. 7.3 Fora creat de curentul de ap care acioneaz pe o suprafa plan nclinat
Teoretic, curentul de ap care se deplaseaz cu viteza v produce pe suprafaa unei
plci nclinat, cu unghiul , o for rezultant normal pe suprafaa plcii, R
r
. Din figura
7.3 se observ c impulsul creat de cantitatea de ap n micare prin ciocnirea cu
suprafaa plan este egal cu impulsul forei rezultante:
dt R sin v sin A dt v
unde: v dt.A sin - volumul care acioneaz asupra plcii n timpul dt;
- densitatea apei (1000kg/m
3
);
v - viteza curentului de ap, [m/s];
- unghiul de nclinare al plcii n grade.
Din relaia (7.7) rezult c, teoretic, fora rezultant pe suprafaa plcii se determin
cu relaia:
[ ] N sin v A R
2 2
Expresia forei rezultante dat de relaia (7.8), determinat prin aplicarea simpl a
legii lui Newton, nu se folosete practic ntruct nu ia n considerare fenomene
suplimentare care nsoesc n realitate aripa hidrodinamic n curentul de ap i care pot fi
luate n considerare cu ajutorul unor coeficieni stabilii experimental. Formula teoretic
dat de relaia (7.8) permite totui evidenierea factorilor principali de care depinde
valoarea forei rezultante.
O soluie pentru crme plate este oferit de formula empiric stabilit de
inginerul francez Josseli:
[ ] N v A
C
sin k
R
2
r
'
unde: A - suprafaa penei crmei, [m
2
];
v - viteza navei, [m/s];
- unghiul de rotire al crmei, n grade;
k - coeficient care ia n considerare influena profilului i densitii apei de mare.
Valorile acestui coeficient sunt:
k = 196 kg/m
3
pentru mersul nainte al navei;
(7.7)
(7.8)
(7.9)
302
k = 407 kg/m
3
pentru mersul napoi al navei.
C
r
coeficient care se determin cu relaia:
+ sin 305 , 0 195 , 0 C
r
Formula (7.9) ofer rezultate bune n cazul crmelor plane. Astfel de crme se
ntlnesc n cazuri rare i n mod deosebit la fluviu. Pentru crmele cu profil
hidrodinamic, utilizate frecvent la navele maritime i fluviale, aceast formul nu ofer
rezultate mulumitoare.
Cercetrile efectuate n domeniul teoriei aripilor aerodinamice, la care o
contribuie important a adus-o Jukovski, au condus la gsirea unei relaii de calcul mai
precis pentru determinarea forei care apare pe aripa aerodinamic, n aer sau ap, pentru
oricare form de profil aerodinamic.
n figura 7.4 este reprezentat crma cu profil hidrodinamic, nclinat fa de
planul diametral cu un unghi . Fora rezultant a presiunii apei pe crm, R
t
aplicat n
punctul A se poate descompune dup dou sisteme de axe, astfel:
primul sistem, n care x corespunde cu direcia de mers a navei i a
curentului de ap, iar axa y este perpendicular pe direcia de micare, permite
descompunerea forei rezultante n componentele: R
x
- orientat n sens contrar sensului
de micare a navei i R
y
- perpendicular pe prima. Componenenta R
x
se numete fora de
rezisten la naintare iar componenta transversal R
y
se numete fora de ascensiune sau
fora portant. Dup aceast descompunere rezult:
2
y
2
x t
R R R +
al doilea sistem, n care una din direcii coincide cu planul crmei, iar cea
de-a doua este normal la planul crmei, permite descompunerea forei rezultante n
componentele: R - normal la planul crmei, care permite calculul momentului la axul
crmei i T - tangenial la planul crmei care asigur deplasarea curentului de ap de-a
lungul crmei. Din aceast descompunere rezult:
2 2
t
T R R +
Fig. 7.4 Fora de presiune pe crma pasiv cu profil hiderodinamic
Din figura 7.4 rezult urmtoarele relaii ntre componentele de pe cele dou
sisteme de axe:
(7.10)
(7.11)
(7.12)
303
+ sin R cos R R
x y
,
sin R cos R T
y x
.
Teoria aripii aerodinamice permite determinarea forelor care apar asupra profilelor
aerodinamice de forme diferite, n aer sau n ap. Conform acestei teorii fora rezultant
normal pe suprafaa crmei se determin cu relaia:
( ) [ ] N
2
v A
sin C cos C R
2
x y
+
unde: C
y
- coeficient adimensional al forei portante (R
y
);
C
x
- coeficient adimensional al forei de rezisten (R
x
);
v - viteza navei, [m/s];
A - suprafaa crmei, [m
2
];
- densitatea apei de mare, = 1025kg/m
3
;
- unghiul dintre planul crmei i direcia de micare a navei.
Mrimile coeficienilor C
y
i C
x
depind de dimensiunea relativ, a profilului, de
grosimea relativ, t , de unghiul de rotire a crmei, i altele.
n urma efecturii msurtorilor experimentale s-au ntocmit atlase cu graficele
coeficienilor C
x
si Cy pentru crme de profile diferite i pentru o diversitate mare de
forme aerodinamice.
Pentru exemplificare, n figura 7.5 se prezint graficele C
y
= f() i C
x
= f(),
= 1, = 1,23 i = 1,425, pentru unele profile de crm.
Profilele hidrodinamice ntrebuinate la construcia crmelor sunt simetrice.
Geometria i caracteristicile lor, aa cum s-a menionat, sunt determinate n laboratoare
de hidro sau aerodinamic. Cele mai rspndite sunt:
- profilele de tip NACA (National Advisory Commitee for Aeronautics),
obinute experimental n laboratoarele din S.U.A. Se folosesc la navele de vitez
moderat, pentru crmele amplasate n curentul elicelor;
- profilele de tip NEJ, obinute dup formulele lui N.E.Jukovski, se folosesc la
construcia crmelor pentru navele rapide;
- profile de tip AGHI, obinute experimental n laboratoarele din Rusia, se
folosesc pentru construcia crmelor navelor cu doi arbori portelice i crmelor din prova;
- profile de tip
..
O G , obinute exxperimental n laboratoarele de aerodinamic
din ttingen o G
..
, se folosesc la navele cu doi arbori portelice, pentru construcia crmelor
amplasate n P.D.
ntruct ncercrile au fost efectuate cu profile avnd o anumit alungire relativ
1
, este necesar a corecta parametrii hidrodinamici ai profilului pentru alungirea real a
crmei:
(7.13)
(7.14)
(7.15)
304
305
Fig. 7.5 Graficele caracteristicilor diferitelor profile de crme: a, c i d - dependentele coeficienilor C
x
,
C
y
, C
p
de unghiul de atac ;
b, d, f - dependena coeficientului momentului C
m
de unghiul pentru diferite grade de compensare, k
306
)
1 1
(
C
C C
1 2
2
y
1
x
2
x
+ , (7.16)
)
1 1
(
C
3 , 57
1 2
y
1 2
+ , (7.17)
coeficienii C
y
i C
m
rmn neschimbai.
Obinuit, n simbolizarea profilelor hidrodinamice folosite la crme se specific
tipul i valoarea coeficientului t precedat de un zero (spre exemplu, simbolizarea NACA
0018 corespunde profilului hidrodinamic de tip NACA avnd t =0,18).
Cuplul la axul crmei. Pentru calculul acionrii electrice a crmei este necesar s
cunoatem cuplul necesar pentru rotirea crmei. n figura 7.6 se prezint braul forei
rezultante de presiune pentru crme necompensate i compensate, la mersul nainte i
mersul napoi al navei.
Fig. 7.6 Braul forei rezultante de presiune pe crm la mersul nainte i napoi al navei; I - crm
obinuit, II - crm compensat
Pentru crma cu forma dreptunghiular obinuit, momentul la axul crmei este:
p a
X R M
unde X
p
este distana de la centrul de presiune A, n care se aplic fora rezultant
normal R pn la axul crmei.
Poziia centrului de presiune A, n care se aplic fora rezultant normal pe
planul crmei, se schimb n funcie de valoarea unghiului de nclinare a crmei. Se
definete un coeficient adimensional al centrului de presiune C
p
:
b
X
C
p
p
Valorile coeficientului centrului de presiune C
p
sunt determinate experimental,
pentru diferite profile de crm, n funcie de unghiul de nclinare, C
p
= f() i sunt date
n atlase. Pentru profilele de crm din figura 7.5 sunt date i graficele pentru coeficienii
C
p
. Din relaiile (7.18) i (7.19) rezult:
(7.18)
(7.19)
307
b C R M
p a
La crmele compensate, axul crmei este la distana b1 fa de partea din fa a
crmei (figura 7.6) i momentul la axul crmei se calculeaz cu relaia:
( )
1 p a
b b C R M
Dac n relaia (7.20) se introduce valoarea forei rezultant normal, dat de relaia
(7.15), rezult:
( ) b C
2
v A
sin C cos C M
p
2
x y a
+
Introducnd un coeficient adimensional de forma:
( )
2
a
x y p m
v A
2
M
sin C cos C C C
+
relaia (7.22) devine:
2
v A
b C M
2
m a
unde C
m
este coeficientul momentului i are n vedere schimbarea valorii momentului la
axul crmei n funcie de unghiul de rotire. Acest coeficient se determin, de asemenea,
prin ncercri experimentale pe diferite tipuri de profile i se d n atlase.
Pentru profilele date n figura 7.5 se prezint i caracteristicile C
m
= f(). ntre
coeficienii adimensionali care caracterizeaz un anumit profil aerodinamic exist relaia
de calcul (7.23).
Relaia (7.24) permite calculul cuplului pentru crma simpl. Pentru crma
compensat momentul, n funcie de coeficientul C
m
, se calculeaz cu relaia:
( ) k f C
2
v A
b M
m
2
a
unde: + sin C cos C f
x y
;
k - gradul de compensare, relaia (7.6).
La mersul napoi al navei se schimb poziia centrului de presiune A, aa cum se
prezint n figura 7.6 i momentele la axul crmei se calculeaz cu relaiile:
a. pentru crma simpl la mers napoi:
( ) ( )
m
2
a
C k
2
v A
b x b R M
b. pentru crma compensat la mers napoi:
( ) ( ) [ ]
m
2
1 a
C f 1 k
2
v A
b b x b R M
Uneori forma penei crmei este diferit de forma dreptunghiular. n acest caz, suprafaa
crmei se mparte n mai multe pri care se aproximeaz cu forma dreptunghiular.
Suprafaa crmei, prezentat n figura 7.7 se mparte n n pri care sunt aproximate
cu dreptunghiuri i permit aplicarea formulelor stabilite pentru calculul forei i a
(7.20)
(7.21)
(7.22)
(7.23)
(7.24)
(7.25)
(7.26)
(7.27)
308
momentului la axul crmei. Suprafeele elementare cu nlimea h i limea b
j
au
aria
j j
b h A .
Mrimea forei care acioneaz pe suprafaa elementar j este:
( )
+
2
v A
sin C cos C R
2
j
x y j
(7.28)
iar momentul corespunztor la axul crmei,
( )
j 1 j p j aj
b b C R M (7.29)
Dup determinarea forelor i momentelor elementare se calculeaz fora i
momentul total:
n 2 1
R R R R + + + K (7.30)
n 2 1 a
M M M M + + + K (7.31)
Rezultatele calculelor efectuate se prezint sub form grafic.
Fig. 7.7 Pana crmei pasive de form oarecare
309
Fig. 7.8 Curbele dependenei ( ) f M
a
pentru crmele simple (a) i compensate (b); 1 - pentru
mersul nainte, 2 - pentru mersul napoi
n figura 7.8 se prezint dependena momentului la axul crmei de unghiul ,
( ) f M
a
, la deplasarea crmei dintr-un bord n cellalt bord pentru crma simpl (a)
i compensat (b) la mersul navei nainte (1) i la mersul navei napoi (2) cu respectarea
urmtoarelor reguli de semne:
unghiurile de rotire ale crmei pentru deplasarea din planul diametral spre
bord se consider pozitive;
unghiurile de rotire ale crmei pentru deplasarea din bord spre planul
diametral se consider negative;
momentele de la axul crmei care se opun deplasrii acesteia sunt pozitive,
iar cele care sunt n sensul deplasrii se consider negative.
Din curbele care reprezint dependena momentului la axul crmei de unghiul de
rotire al crmei, reprezentate n figura 7.8, rezult c momentul maxim la axul crmei
pentru mersul napoi este mai mare dect momentul maxim la mersul nainte al navei.
Explicaia const n aceea c braul forei rezultante de presiune este mai mare la mersul
napoi, aa cum rezult din figura 7.8. Cu toate acestea, n mod obinuit, pentru calculul
acionrilor electrice se ia n considerare numai momentul maxim la mersul nainte al
navei, ntruct regulile de registru solicit ca acionrile electrice ale crmelor s asigure
deplasarea crmei la mersul napoi al navei numai pentru o vitez medie, care de obicei
este n limitele 50 - 70% din viteza maxim la mersul nainte al navei. Pentru aceast
vitez medie, momentul maxim la mersul napoi este mai mic dect momentul maxim la
mersul nainte calculat pentru viteza maxim a navei.
Pentru crme compensate, n funcie de gradul de compensare, valorile maxime
ale unghiului
1
nu depesc, n mod normal,
o o
10 7
1
.
Metoda de calcul hidrodinamic prezentat nu ia n considerare influena formei pupa
a navei i a elicei pentru regimul de funcionare al crmei. Aceste influene pot fi stabilite
numai prin ncercri pe modelele realizate la scar.
310
7.3 Mecanisme de transmisie
n instalaiile de guvernare a navelor mecanismele de transmisie asigur
transmiterea momentului de la motorul electric de execuie la axul crmei. Mecanismele
de transmisie utilizate n acest scop se mpart n dou grupe: din prima grup fac parte
transmisiile mecanice, care pot fi cu urub, cu sector de roat dinat i cu cablu, iar a
doua grup o constituie transmisiile electrohidraulice, care la rndul lor pot fi cu pomp
cu debit variabil i cu pomp cu debit constant.
7.3.1 Transmisii mecanice pentru crme
Transmisia cu urub este prezentat n figura 7.9.
Transmisia cu urub se compune din echea crmei E, legat prin tijele 1 i 2 cu
piuliele 4 angrenate cu urubul 3. urubul 3 are filete pe stnga i pe dreapta astfel nct
la rotirea lui piuliele 4 se deplaseaz n sensuri contrare realiznd, prin tijele 1 i 2,
rotirea echei i ca urmare deplasarea penei crmei cu un unghi oarecare.
Fig. 7.9 Vederea general a transmisiei cu urub
urubul 3, prin angrenajul de roi dinate z
1
, z
2
, este cuplat cu axul diferenialului
5 constituit din patru roi conice z
3
, z
4
, z
5
, z
6
libere pe axe.
Roile dinate z
5
i z
6
ale diferenialului sunt cuplate prin angrenaje melc-roat
melcat M
1
i M
2
cu axele electromotoarelor I i II. Pentru realizarea regimului de lucru
este necesar funcionarea unui singur motor electric, cel de al doilea constituind rezerva
instalaiei.
311
Mecanismul mai este prevzut cu un sistem de frn manual 6 i cu un indicator
al poziiei crmei 7.
Acest tip de transmisie se utilizeaz pentru puteri maxime 70 - 80kW i are
randamentul n limitele 0 2 0 4 , , . O particularitate a acestei transmisii este lungimea
mare n raport cu limea, raportul ntre lungime i lime fiind circa 2 75 2 95 , , .
ntruct prezint mare siguran n funcionare i permit introducerea direct a
motorului electric de rezerv, aceste mecanisme s-au folosit pe nave militare i mai pot fi
ntlnite la construciile mai vechi.
Transmisia cu sector este mijlocul folosit frecvent pentru acionrile
electromecanice ale crmei la nave.
Mecanismul de transmisie cu sector, prezentat n figura 7.10 se compune din
sectorul dinat 1 i transmisia cu urub 2. Sectorul este cuplat cu echea 3 prin resoartele 4
care au rolul de amortizare a ocurilor. Echea este fixat pe axul crmei 5, n timp ce
sectorul se aeaz liber, angrenarea sa cu echea fcndu-se prin resoartele 4. Sectorul care
are rolul de amortizare a ocurilor. Echea este fixat pe axul crmei 5, n timp ce sectorul
se aeaz liber, angrenarea sa cu echea fcndu-se prin resoartele 4. Sectorul dinat este n
angrenaj cu roata dinat 6 aezat fix pe axul transmisiei cu urub. Mecanismul mai
dispune de frna mecanic 7 i de indicatorul poziiei crmei 8.
Transmisia cu sector prezint o soluie simpl i sigur n funcionare. Dezavantajele
acestui sistem de transmisie l constituie greutatea mare i dezvoltarea construciei pe lime,
astfel c poate fi instalat numai la nave cu limea mare n pupa navei. Randamentul
transmisiei cu sector este de obicei n limitele 0 4 0 5 , , . Acest tip de transmisie se
folosete pentru puteri ale motoarelor electrice pn la 70kW.
Pentru acionarea sectorului dinat se poate folosi un diferenial, ca i n cazul
mecanismului de transmisie cu urub, cu toate avantajele care rezult.
Transmisia cu cablu se utilizeaz mai mult la navele fluviale.
Transmisia cu cablu prezentat n figura 7.11 se compune din motorul electric m
cuplat elastic prin mufa M cu reductorul cu roi cilindrice R. Axul de ieire al
reductorului este cuplat prin angrenajul de roi dinate z
1
, z
2
cu mecanismul roat de lan-
lan cu role RL, la capetele cruia sunt legate cablurile T
d
i T
s
.
Transmisia cu sector prezint o soluie simpl i sigur n funcionare. Dezavantajele
acestui sistem de transmisie sunt constituite greutatea mare i dezvoltarea construciei pe
lime, astfel c poate fi instalat numai la nave cu limea mare n pupa navei.
Randamentul transmisiei cu sector este de obicei n limitele 0 4 0 5 , , .
Acest tip de transmisie se folosete pentru puteri ale motoarelor electrice pn la
70kW.
Pentru acionarea sectorului dinat se poate folosi un diferenial, ca i n cazul
mecanismului de transmisie cu urub, cu toate avantajele care rezult.
312
Transmisia cu cablu prezentat n figura 7.11 se
compune din motor electric m cuplat elastic
prin mufa M cu reductorul cu roi cilindrice R.
Axul de ieire al reductorului este cuplat prin
angrenajul de roi dinate z
1
, z
2
cu mecanismul
roat de lan - lan cu role RL, la capetele cruia
sunt legate cablurile T
d
i T
s
. Celelalte capete
ale acestor cabluri sunt conduse prin rolele r,
instalate pe bordul drept i pe bordul stng al
navei i legate la sectorul S, cuplat rigid cu axul
crmei C. Axul crmei constituie centrul de
rotaie i realizeaz deplasarea crmei sub
aciunea forelor create de traciunea cablurilor
T
d
i T
s
. Randamentul transmisiei prin cablu
este n limitele 0 4 0 5 , , .
Fig. 7.11 Schema cinematic a transmisiei cu cablu
Fig. 7.12 Transmisie hidraulic cu palete a acionrii electrohidraulice a crmei
7.3.2 Transmisii hidraulice pentru crme
Pentru nave cu deplasament mare i viteze mari sunt necesare momente mari
pentru deplasarea crmei i ca urmare puteri mari pentru instalaia de guvernare. Pentru
realizarea unor momente mari la axul crmei folosind transmisii mecanice sunt necesare
mecanisme de gabarite i greuti mari a cror dispunere pe nav este dificil. De
asemenea, avnd n vedere randamentul mic al transmisiilor mecanice, puterea
electromotoarelor de execuie ar rezulta de valori mari.
Utilizarea transmisiilor hidraulice permite reducerea gabaritelor i greutilor
acionrii electrice, precum i creterea randamentului transmisiei. Totodat transmisia
313
hidraulic poate funciona impecabil i n cazul n care compartimentul crmei este
inundat.
Mainile hidraulice de crm se deosebesc dup modul n care se realizeaz
presa, dup tipul pompelor i dup sistemul de comand. Presiunea fluidului de lucru este
asigurat de o pomp acionat electric.
Dup modul n care se realizeaz presa, transmisiile hidraulice pot fi: cu palete i
cu pistoane.
Maina de crm de tip cu palete este prezentat n figura 7.12.
n interiorul cilindrului presei, 1, jumtate din palete, 2, sunt prinse de corpul
cilindrului i constituie partea fix, iar cealalt jumtate, 3, sunt prinse pe axul crmei 4 i
se rotesc mpreun cu axul crmei. ntre paletele fixe i mobile se formeaz cavitile A i
B. Pentru sensul de pompare a fluidului de lucru reprezentat n figura 7.12 acesta, prin
conductele haurate, ptrunde sub presiune n cavitile B i este recuperat din cavitile
A prin conductele nehaurate. Pe suprafeele paletelor mobile, presiunile fiind inegale,
apare o for rezultant care nsumat produce un cuplu de rotire n sensul indicat n
figur. La schimbarea sensului de transmitere a fluidului de lucru, presiunile n cavitile
A vor fi mai mari dect presiunile din cavitile B i ca rezultat se inverseaz sensul de
rotire a axului crmei.
Maina de crm rotativ cu palete reprezint o construcie compact, se
monteaz direct pe axul crmei i ocup un volum minim n compartimentul crmei.
Firma englez FRIDENB realizeaz o gam larg de astfel de maini hidraulice.
n figura 7.13 i n tabelul 7.1 se prezint caracteristicile tehnice ale motoarelor hidraulice
de tip FRIDENB.
Fig. 7.13. Cote de montaj pentru motorul hidraulic FRIDENBO
314
MOTOR HIDRAULIC DE CRM - FRIDENBO Tabelul 7.1
Tip
Diametrul
axului
crmei
D mm
Momentul
maxim la axul
crmei
A
mm
B
mm
C
mm
M
mm
K
mm
Greutate
kNm tf.m kg.
1 2 3 4 5 6 7 8 9 10
Presiune nominal de lucru 50 - 60 bar
HS 9
75-100 18 1,8 560 75 - 365 145 230
HS 12
100-125 24 2,4 750 75 - 385 150 430
HS 20
115-145 40 4 750 75 - 475 150 600
HS 30
140-170 60 6 750 75 - 620 160 770
HS 40
170-230 80 8 970 120 - 650 230 1380
HS 60
170-230 120 12 970 120 - 800 230 1650
HS 90
190-250 180 18 970 120 - 840 230 1750
HS 120
240-350 240 24 1280 140 - 850 245 3000
HS 122
240-300 240 24 1050 73 - 930 200 2000
HS 180
260-350 360 36 1280 140 - 880 245 3200
HS 280
330-390 560 56 1280 140 - 1165 245 3800
HS 360
340-450 720 72 1420 150 1085 - 300 6000
HS 450
370-480 900 90 1740 195 1075 - 355 8000
HS 700
460-560 1400 140 1740 195 1390 - 355 10000
HS1 120
460-580 2240 224 1740 195 1065 - 370 12000
Presiunea nominal de lucru 75 bar.
HS 3200
530-660 3200 320 2100 240 1048 - - 16000
HS 4600
610-760 4600 460 2470 290 1190 - - 18000
HS 6500
690-850 6500 650 2720 310 1208 - - 25000
315
Maina de crm de tip cu pistoane este tipul de baz al tansmisiilor hidraulice
pentru crme utilizate n flotele comerciale. n figura 7.14 se prezint principiul de
realizare a transmisiei cu pistoane pentru acionarea crmei.
Fig. 7.14 Transmisia hidraulic cu pistoane a acionrii crmei
n acest caz, presa este realizat din cilindrii 5 i pistoanele mobile 6. Pistoanele
se mic pe aceeai direcie i sunt sudate de o ram comun 7. n interiorul ramei este
dispus mufa de legtur 9, susinut de ram n dou lagre alunectoare: superior i
inferior. Echeea crmei 8, de seciune circular, alunec n interiorul mufei de legtur. n
acest mod, la deplasarea spre stnga sau spre dreapta a pistoanelor se asigur gradele de
libertate n micare a echei 8.
Motor electric 4, antreneaz pompa 3 i prin tubulatura 1 fluidul de lucru este
transmis sub presiune ntr-un cilindru i recuperat fr presiune din cellalt. Presiunile
inegale din cei doi cilindri fac ca axul cu cele dou pistoane s se deplaseze ntr-un
anumit sens. Micarea de deplasare axial a pistoanelor este transformat n micare de
rotire a axului crmei 2 prin sistemul mecanic: muf de legtur - echea crmei.
Inversarea sensului de rotire la axul crmei se obine prin inversarea sensului de micare a
fluidului de lucru debitat de pomp.
n funcie de valoarea momentului maxim la axul crmei care trebuie realizat, se
poate folosi o pereche de prese aa cum este prezentat n figura 7.14, dou perechi de
prese i chiar patru perechi dispuse cte dou pe un nivel. Cea mai mare rspndire o are
sistemul de dou perechi de prese cu care se pot realiza momente de valori n limitele 0,6
- 10 tf.m. Cu patru perechi de prese se pot realiza momente de la 16 la 200 tf.m, necesare
n cazul supertancurilor petroliere. Ca exemplu de putere maxim realizat cu transmisii
hidraulice, se poate prezenta maina de crm realizat de firma japonez Kavasaki
pentru supertancuri avnd momentul maxim 1050 tf.m cu diametrul pistoanelor 425 mm
i patru pompe.
316
Pompele folosite n transmisiile hidraulice sunt de tipul cu debit variabil sau cu
debit constant. Cele mai utilizate sunt pompele cu debit variabil care permit simplificarea
schemei hidraulice prin eliminarea unor elemente suplimentare: valvule electromagnetice,
sertare distribuitoare .a. Pompele cu debit constant se folosesc, de regul, pentru mainile
de crm cu palete.
Pompele cu debit variabil pot fi cu pistoane axiale sau radiale. Principiul de
funcionare este acelai pentru cele dou tipuri de pompe, diferena dintre ele fiind numai
constructiv. Pompele cu debit variabil funcioneaz n regim de rotaie continu i nu
sunt reversibile. Mrimea debitului i direciei fluidului de lucru este determinat de
poziia elementului excentric. Sensul n care se deplaseaz elementul excentric determin
direcia de deplasare a fluidului, iar mrimea deplasrii excentricului determin mrimea
debitului fluidului de lucru.
Pompa de tip cu pistoane radiale se ntlnete mai frecvent n aplicaiile practice.
n figura 7.15 se prezint principiul de construcie i funcionare a pompei de tip cu piston
radial.
Fig. 7.15 Principiul de construcie i funcionare a pompei de tip cu pistoane radiale
Motorul electric nvrtete rotorul pompei, 2, care alunec pe axul fix 1. Axul fix 1
are dou canale longitudinale care se termin cu orificiile 7 i 8 i caviti transversale
interioare corpului nchis n care se rotete rotorul. Canalele longitudinale de pe axul fix
comunic cu canalele radiale 3 ale rotorului. n canalele radiale se deplaseaz tijele 4 care
ndeplinesc rolul de pistoane radiale ale pompei. La exterior, capetele tijelor rotunjite alunec
n interiorul inelului 5. Acest inel poate fi deplasat pe orizontal prin intermediul
prelungitorului 6 i poate ocupa o poziie concentric cu rotorul sau excentric fa de acesta
spre dreapta sau spre stnga dup sensul de micare al prelungitorului 6. Dac inelul este
concentric cu rotorul pompei, pistoanele radiale nu se deplaseaz la rotirea acestuia i debitul
pompei este nul. Prin poziia excentric a inelului se realizeaz deplasri radiale a pistoanelor.
La rotirea rotorului n sens orar, din canalul 8 se face admisia fluidului i n canalul 7 se
preseaz fluidul realizndu-se un anumit debit. Sensul de circulaie al fluidului se schimb
funcie de direcia n care se deplaseaz inelul; spre stnga sau spre dreapta, iar debitul
pompei, este variabil n funcie de mrimea excentricitii. Comanda pentru sensul de
pompare i mrimea debitului se face cu un manipulator care acioneaz prelungitorul 6.
Pentru mrirea debitului, rotorul pompei se realizeaz din dou discuri de lucru
paralele. Pentru un disc, numrul pistoanelor este de regul 511.
Pompa de tip cu pistoane axiale se deosebete de tipul anterior prin dispunerea
pistoanelor fa de axul de rotire. n figura 7.16 se prezint o seciune prin aceast pomp.
317
Motorul electric este cuplat cu mufa 7 n form de cup. Pe flana frontal a
mufei sunt locauri sferice pentru capetele pistoanelor 6. Excentricitatea la acest tip de
pomp este creat pe seama unghiului de nclinare a mufei 7 fa de axa longitudinal a
pompei. De asemenea i acest tip de pomp este ntlnit frecvent n transmisiile
hidraulice.
n transmisiile hidraulice, n calitate de fluid de lucru se utilizeaz uleiurile
minerale (ulei de turbine, ulei de transformator).
Dup sistemul de comand, transmisiile hidraulice se clasific n funcie de
elementul de execuie care acioneaz manipulatorul pompei i n funcie de forma
legturii cu postul de comand de la distan. Pentru comanda manipulatorului se folosesc
teletransmisii electrice sau de tip hidraulic. Sistemul de comand de la distan a
manipulatorului pompei se realizeaz n multe forme, de ctre diferite firme
constructoare.
Fig. 7.16 Pompa de tip cu pistoane axiale.
1-axul de rotaie; 2-plac disc de sprijin; 3-corpul turnat al pompei;
4-rotorul pompei; 5-piston alunector; 6-capul pistonului; 7-muf n form de cup;
8-manipulator.
Caracteristicile de baz ale transmisiilor hidraulice constau n:
a) posibilitatea de a realiza cele mai mari momente la axul crmei;
b) raportul de transmisie ntre motorul electric de execuie care acioneaz
pompa i axul crmei este variabil i se schimb n limite largi. Acest raport depinde de
mrimea reglat a debitului pompei i modificarea braului de lucru al echei n funcie de
unghiul de rotire al crmei;
c) reglare n limite largi care pot ajunge la raportul 1:1000;
d) lipsa autofrnrii i posibilitatea revenirii crmei, de la sine, n planul
diametral la ieirea din funciune a transmisiei hidraulice. Pentru meninerea crmei
nclinat cu anumite unghiuri este important aciunea sistemului de urmrire;
e) posibilitatea folosirii motoarelor asincrone cu rotor n scurtcircuit avnd n
vedere funcionarea continu cu turaie constant a pompelor n transmisiile hidraulice;
f) funcionare lin i zgomot redus;
g) siguran n funcionare;
h) necesit un timp ndelungat de pregtire n vederea funcionrii dat de
necesitatea umplerii cu fluidul de lucru, aerisire i reglaje;
318
i) lucrri de reparaie i ntreinere complicate, presarea conductelor i
ermetizarea etanrilor;
j) pre de cost ridicat pentru puteri mici comparativ cu transmisiile mecanice;
k) pierderi de energie prin funcionarea nentrerupt a pompelor incluznd i
perioadele n care crma se afl n repaus.
Din analiza comparativ a celor dou sisteme de transmisii: mecanic i
hidraulic, rezult c transmisia hidraulic prezint caracteristici mai bune. Transmisia
mecanic se folosete pentru valori mici ale momentului la axul crmei i deci puteri mici
ale instalaiei de guvernare, situaie n care acest tip de transmisie este mai simpl i mai
puin costisitoare dect transmisia hidraulic.
Transmisia hidraulic este singurul mijloc folosit pentru nave cu deplasamente i
viteze mari care necesit realizarea unor momente mari la axul crmei. n msura n care
firmele constructoare realizeaz maini hidraulice de puteri reduse, la preuri comparative
cu transmisiile mecanice, se extinde folosirea lor i pe nave cu deplasamente mai mici.
7.4 Scheme electrice de acionare a crmei
7.4.1 Scheme electrice de comand a acionrilor electromecanice
7.4.1.1 Generaliti privind acionrile electromecanice
Pentru deplasarea crmei, cu transmisie mecanic, din planul diametral n oricare
bord, momentul la axul motorului electric n funcie de momentul la axul crmei este:
[ ] N.m
i
M
M
m
a
n care: M
a
- momentul la axul crmei, [N.m ];
i - raportul de transmisie;
m
- randamentul transmisiei.
La revenirea crmei dintr-un bord n planul diametral, momentul la axul
motorului electric are o valoare minim deoarece forele de presiune care acioneaz pe
pana crmei creeaz un moment n sensul de aducere a crmei n planul diametral. n
acest caz, momentul creat de fora de presiune a apei i momentul dezvoltat de motorul
electric au acelai sens i sunt orientate pentru nvingerea frecrilor din maina crmei.
[ ] m . N
i
M
' M
m
'
a
unde: M - momentul la axul motorului electric pentru micarea de revenire a
crmei;
'
a
M - momentul la axul crmei pentru ntoarcerea spre planul diametral;
m
- randamentul transmisiei la micarea invers.
Determinarea momentului la axul motorului electric pentru micarea de revenire
a crmei n planul diametral cu relaia (7.33) presupune unele dificulti i de aceea
pentru calculele practice, acoperitoare, se consider valoarea acestui moment constant i
(7.32)
(7.33)
319
egal cu valoarea cuplului de mers n gol M
0
. Valoarea cuplului de mers n gol se
aproximeaz n funcie de valoarea momentului maxim, astfel:
- pentru crme simple:
M
0
= (0,1 - 0,2) M
max
- pentru crme compensate:
M
0
= (0,2 - 0,3) M
max
Diagramele de sarcin ale motorului electric reprezint dependena momentului
la axul motorului electric n funcie de unghiul de rotire al crmei, M = f (). Pentru
construirea acestor diagrame se consider cunoscut dependena momentului la axul
crmei, M
a
, n funcie de unghiul , prezentat n figura 7.8 i se fac urmtoarele
aproximri: se iau n calcul numai momentele pozitive la axul crmei, momentele
negative se substituie cu momentul de mers n gol M
0
i se consider c funcia M = f ()
variaz linear de la momentul de mers n gol, M
0
, la momentul maxim M
max
. n figura
7.17 se prezint diagramele de sarcin simplificat pentru motorul electric de acionare a
crmei.
Fig. 7.17 Diagramele de sarcin la axul motorului electric. a) pentru crma simpl la mers
nainte; pentru crma compensat la mers nainte; c) mers napoi pentru toate tipurile de
crm.
Condiiile specifice de funcionare a motorului electric pentru crm sunt determinate
de sistemul de comand i de tipul mecanismului de transmisie. Pentru meninerea navei pe
drum constant sunt necesare deplasri frecvente ale crmei cu unghiuri mici. Condiia
impus de registrul de clasificare privind asigurarea a 350 de deplasri ale crmei, cu
unghiuri mici, ntr-o or, solicitat n cazul transmisiilor mecanice, o frecven mare de
conectare a motorului electric este respectat n aceste condiii numai dac acionarea
electric trebuie s reziste fr a depi limitele normale de nclzire i fr deformri sau
deteriorri mecanice. n timpul manevrelor n port sau al navigaiei prin locuri nguste,
numrul de conectri ale motorului electric i se reduce dar, n acelai timp, crete durata
ciclurilor de lucru i valoarea momentelor la axul crmei pentru realizarea unor unghiuri
mari de rotire a crmei.
O alt cerin pentru motorul electric de acionare a crmei este ca pe durata
funcionrii s permit, prin sistemul de acionare electric, frnarea complet timp de 1
minut sau reducerea foarte mare a turaiei. Aceast situaie poate avea loc pe timp de
(7.34)
(7.35)
320
furtun ca urmare a izbirii valurilor de pana crmei sau n condiii de mare calm ca
urmare a lovirii panei crmei de sloiuri de ghea sau obiecte n semiimersiune.
Avnd n vedere regimul de lucru motorului electric pentru acionarea crmei,
caracteristicile mecanice de tip moale asigur ndeplinirea cerinelor necesare. Aceste
tipuri de caracteristici asigur amortizarea reaciei acionrii electrice la ocuri de sarcin
aplicate brusc.
Motoarele de curent continuu cu excitaie derivaie, alimentate direct de la
reea, se folosesc, de regul, cu o rezisten permanent conectat n circuitul indusului,
pentru nmuierea caracteristicii mecanice i pentru limitarea momentului de repaus sub
curent. Astfel de motoare se utilizeaz, de regul, pentru puteri mici, pn la 3kw, din
cauza pierderilor de energie pe rezistena permanent conectat.
Acest tip de motor se folosete, de asemenea, n sistemul generator-motor ca motor
de execuie. n acest caz, nfurarea de excitaie derivaie este folosit ca nfurare de
excitaie independent. n tabelul 7.2 se prezint caracteristicile tehnice ale motoarelor
electrice de curent continuu cu excitaie derivaie din seria DM pentru serviciile de
funcionare intermitent i de scurt durat.
Motoarele electrice de curent alternativ folosite pentru acionarea crmei sunt de
tipul asincron cu rotorul n scurtcircuit i asincron cu rotorul bobinat.
Motoarele asincrone cu rotor n scurtcircuit, de construcie normal, au
caracteristica mecanic rigid. Pentru nmuierea caracteristicii mecanice i pentru
uurarea pornirii se construiesc motoare asincrone n scurcircuit speciale: cu dubl
colivie, cu bare nalte i cu rezistena rotorului mrit. Astfel de motoare au alunecarea
mrit n raport cu construciile normale i ca urmare caracteristica mai puin rigid.
Motoarele asincrone n scurtcircuit cu mai multe trepte de turaie folosite n
acionarea crmei sunt n mod obinuit cu dou trepte de turaie n raportul 2:1 sau 3:1. n
tabelul 7.3 se prezint caracteristicile tehnice ale motroarelor electrice din seria MA cu
dou trepte de turaie.
Valorile mari ale curenilor de pornire, pierderile interne nsemnate de energie i
nclzirea, ocurile mecanice n acionare, sunt factori care limiteaz folosirea acestor
tipuri de motoare n acionri ale crmei.
Motorul asincron cu rotor bobinat se poate folosi pentru acionarea crmei, dar
utilizarea sa pentru acest scop este mai rar ntlnit.
7.4.1.2 Scheme electrice de comand a acionrii crmelor cu funcionare simpl
prin contactoare i relee
Astfel de sisteme de acionare electric sunt sisteme deschise i prezena
timonierului este obligatorie. Schemele de comand cu funcionare simpl asigur
pornirea, reglarea vitezei, frnarea, inversarea sensului de rotaie, limitarea momentului
de repaus sub curent i protecia motoarelor electrice de acionare.
3
2
1
T
a
b
e
l
u
l
7
.
2
.
C
a
r
a
c
t
e
r
i
s
t
i
c
i
l
e
t
e
h
n
i
c
e
a
l
e
m
o
t
o
a
r
e
l
o
r
e
l
e
c
t
r
i
c
e
d
e
c
u
r
e
n
t
c
o
n
t
i
n
u
u
n
s
e
r
i
a
D
M
c
u
e
x
c
i
t
a
i
e
p
a
r
a
l
e
l
,
n
d
i
f
e
r
i
t
e
r
e
g
i
m
u
r
i
d
e
l
u
c
r
u
T
i
p
u
l
e
l
e
c
t
r
o
m
o
t
o
r
u
-
l
u
i
R
e
g
i
m
D
A
=
2
5
%
R
e
g
i
m
6
0
m
i
n
u
t
e
R
e
g
i
m
3
0
m
i
n
u
t
e
R
e
g
i
m
D
A
=
4
0
%
P
u
t
e
r
e
[
k
w
]
C
u
r
e
n
t
u
l
[
A
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
P
u
t
e
r
e
[
k
w
]
C
u
r
e
n
t
u
l
[
A
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
P
u
t
e
r
e
[
k
w
]
C
u
r
e
n
t
u
l
[
A
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
P
u
t
e
r
e
[
k
w
]
C
u
r
e
n
t
u
l
[
A
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
C
u
s
t
a
b
i
l
i
-
z
a
r
e
F
s
t
a
b
i
l
i
-
z
a
r
e
C
u
s
t
a
b
i
l
i
-
z
a
r
e
F
s
t
a
b
i
l
i
z
a
r
e
C
u
s
t
a
b
i
l
i
-
z
a
r
e
F
s
t
a
b
i
l
i
-
z
a
r
e
C
u
s
t
a
b
i
l
i
-
z
a
r
e
F
s
t
a
b
i
l
i
z
a
r
e
D
M
-
1
1
2
,
8
1
6
1
7
5
0
1
8
0
0
2
,
5
1
4
,
5
1
7
4
0
1
7
9
0
3
1
8
1
6
5
0
1
7
1
0
2
,
2
1
2
,
5
1
8
0
0
1
8
5
0
D
M
-
1
2
3
,
8
2
1
1
4
8
0
1
5
5
0
3
,
4
1
9
,
5
1
4
5
0
1
5
2
0
4
,
3
2
5
1
3
6
0
1
4
2
0
3
1
6
,
5
1
5
4
0
1
5
9
0
D
M
-
2
1
5
,
5
3
1
1
4
2
0
1
4
6
0
5
,
5
3
1
1
4
0
0
1
4
4
0
6
,
5
3
7
,
5
1
3
3
0
1
3
8
0
4
,
4
2
4
,
5
1
4
6
0
1
5
0
0
D
M
-
2
2
8
4
4
1
4
9
0
1
5
5
0
8
4
4
1
4
5
0
1
5
1
0
1
0
5
5
1
3
9
0
1
4
5
0
6
,
5
3
5
1
5
1
0
1
5
7
0
D
M
-
3
1
1
2
6
4
1
3
5
0
1
4
1
0
1
1
,
5
6
2
1
3
2
5
1
3
7
5
1
4
,
5
7
8
1
2
6
0
1
3
1
0
9
,
5
5
1
1
3
6
0
1
4
2
0
D
M
-
3
2
1
6
8
4
1
1
8
0
1
2
3
0
1
8
9
5
1
1
4
0
1
1
9
0
2
2
1
2
0
1
0
8
0
1
1
5
0
1
3
6
6
1
1
9
0
1
2
4
0
D
M
-
4
1
2
2
1
1
4
1
1
0
0
1
1
6
0
2
5
1
3
0
1
0
5
0
1
1
0
0
3
0
1
6
0
1
0
2
0
1
0
8
0
1
7
,
5
9
1
1
1
2
0
1
1
6
0
D
M
-
4
2
2
9
1
5
0
1
0
2
0
1
0
4
0
3
5
1
8
2
9
6
0
9
8
0
4
4
2
3
0
9
3
0
9
6
0
2
3
1
1
8
1
0
2
0
1
0
4
0
D
M
-
5
2
3
8
1
9
3
9
8
0
1
0
2
0
4
9
2
5
0
9
3
0
9
7
0
6
0
3
1
0
9
0
0
9
4
0
3
0
1
5
3
9
8
0
1
0
2
0
D
M
-
6
2
6
0
3
0
0
-
9
5
0
7
5
3
8
0
-
9
0
0
9
5
4
8
5
-
9
0
0
4
0
2
0
5
-
9
5
0
D
M
-
1
1
2
1
2
1
1
6
0
1
2
0
0
1
,
8
1
1
1
1
6
0
1
1
9
0
2
,
2
1
4
1
0
8
0
1
1
0
0
1
,
6
9
,
8
1
2
1
0
1
2
4
0
D
M
-
1
2
3
1
7
,
5
1
1
5
0
1
2
0
0
2
,
6
1
5
,
5
1
1
4
0
1
1
8
0
3
,
2
1
9
,
5
1
0
6
0
1
1
0
0
2
,
4
1
3
,
5
1
2
0
0
1
2
3
0
D
M
-
2
1
4
,
5
2
6
1
0
2
0
1
0
5
0
4
,
5
2
6
1
0
0
0
1
0
3
0
5
,
2
3
1
9
5
0
9
8
0
3
,
6
2
0
,
5
1
0
6
0
1
0
8
0
D
M
-
2
2
6
3
3
1
0
9
0
1
1
3
0
6
3
3
1
0
7
0
1
1
0
0
7
,
5
4
3
1
0
0
0
1
0
3
0
4
,
8
2
6
,
5
1
1
2
0
1
1
5
0
3
2
2
C
a
r
a
c
t
e
r
i
s
t
i
c
i
l
e
t
e
h
n
i
c
e
a
l
e
m
o
t
o
a
r
e
l
o
r
e
l
e
c
t
r
i
c
e
d
e
c
u
r
e
n
t
c
o
n
t
i
n
u
u
n
s
e
r
i
a
D
M
c
u
e
x
c
i
t
a
i
e
p
a
r
a
l
e
l
,
n
d
i
f
e
r
i
t
e
r
e
g
i
m
u
r
i
d
e
l
u
c
r
u
T
i
p
u
l
e
l
e
c
t
r
o
m
o
t
o
r
u
-
l
u
i
R
e
g
i
m
D
A
=
2
5
%
R
e
g
i
m
6
0
m
i
n
u
t
e
R
e
g
i
m
3
0
m
i
n
u
t
e
R
e
g
i
m
D
A
=
4
0
%
P
u
t
e
r
e
[
k
w
]
C
u
r
e
n
t
u
l
[
A
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
P
u
t
e
r
e
[
k
w
]
C
u
r
e
n
t
u
l
[
A
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
P
u
t
e
r
e
[
k
w
]
C
u
r
e
n
t
u
l
[
A
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
P
u
t
e
r
e
[
k
w
]
C
u
r
e
n
t
u
l
[
A
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
C
u
s
t
a
b
i
l
i
-
z
a
r
e
F
s
t
a
b
i
l
i
-
z
a
r
e
C
u
s
t
a
b
i
l
i
-
z
a
r
e
F
s
t
a
b
i
l
i
z
a
r
e
C
u
s
t
a
b
i
l
i
-
z
a
r
e
F
s
t
a
b
i
l
i
-
z
a
r
e
C
u
s
t
a
b
i
l
i
-
z
a
r
e
F
s
t
a
b
i
l
i
z
a
r
e
D
M
-
3
1
8
,
5
4
7
8
6
0
9
0
0
7
,
8
4
3
8
5
0
8
7
0
1
0
5
7
8
0
0
8
3
0
6
,
8
3
7
8
8
0
9
1
0
D
M
-
3
2
1
2
6
5
7
6
0
7
9
0
1
1
6
0
7
4
0
7
7
0
1
4
,
2
7
9
7
0
0
7
3
0
9
,
5
5
1
7
7
0
8
0
0
D
M
-
4
1
1
6
8
5
6
9
0
7
1
0
1
7
9
2
6
6
0
6
8
0
2
0
1
1
0
6
4
0
6
6
0
1
3
6
9
7
0
0
7
2
0
D
M
-
4
2
2
1
1
1
0
6
4
0
6
6
0
2
4
1
3
0
6
0
5
6
2
5
2
9
1
6
0
6
0
0
6
1
0
1
7
8
9
6
6
0
6
7
0
D
M
-
5
2
3
2
1
6
4
7
3
0
7
6
0
3
5
1
8
0
7
0
0
7
2
5
4
3
2
2
4
6
7
5
7
0
0
2
5
1
2
8
7
3
0
7
6
0
3
2
3
T
a
b
e
l
u
l
7
.
3
C
a
r
a
c
t
e
r
i
s
t
i
c
i
l
e
t
e
h
n
i
c
e
a
l
e
m
o
t
o
r
u
l
u
i
a
s
i
n
c
r
o
n
c
u
d
o
u
t
r
e
p
t
e
d
e
v
i
t
e
z
d
i
n
s
e
r
i
a
M
A
p
e
n
t
r
u
r
e
g
i
m
u
l
d
e
l
u
c
r
u
i
n
t
e
r
m
i
t
e
n
t
d
e
s
c
u
r
t
d
u
r
a
t
T
i
p
u
l
N
r
.
P
u
t
e
r
e
a
R
e
g
i
m
d
e
l
u
c
r
u
T
u
r
a
i
a
C
u
r
e
n
t
u
l
d
e
l
i
n
i
e
[
A
]
c
o
s
M
o
m
e
n
t
u
l
m
a
x
i
m
M
o
m
e
n
t
u
l
d
e
p
o
r
n
i
r
e
C
u
r
e
n
t
u
l
d
e
p
o
r
n
i
r
e
[
A
]
M
o
m
e
n
t
u
l
d
e
v
o
l
a
n
t
[
k
g
m
2
]
m
o
t
o
r
e
l
e
c
t
r
i
c
u
l
u
i
d
e
p
o
l
i
[
k
w
]
D
A
%
[
r
o
t
/
m
i
n
]
2
2
0
V
3
8
0
V
[
k
g
f
.
m
]
[
k
g
f
.
m
2
2
0
V
3
8
0
V
F
f
r
C
u
f
r
M
A
1
2
1
-
4
/
8
4
1
,
3
4
0
1
3
8
5
6
,
8
3
,
9
0
,
7
3
2
,
6
2
,
6
2
9
,
5
1
7
0
,
0
7
0
,
1
1
8
0
,
8
1
5
6
3
5
6
,
6
3
,
8
0
,
6
8
2
,
4
2
,
4
1
4
8
,
1
M
A
1
2
2
-
4
/
1
2
4
2
,
2
4
0
1
3
6
5
9
,
7
5
,
6
0
,
8
0
3
,
9
3
,
5
4
1
,
5
2
4
0
,
1
2
0
,
1
6
1
2
0
,
7
1
5
3
6
5
9
,
4
5
,
4
0
,
5
6
3
,
6
3
,
6
1
3
,
7
7
,
9
M
A
2
2
1
-
4
/
1
2
4
3
,
6
4
0
1
3
9
0
1
5
,
6
9
0
,
8
0
6
,
4
5
,
8
7
3
4
2
0
,
1
9
0
,
2
4
1
2
1
,
3
1
5
4
2
0
1
7
,
3
1
0
0
,
4
8
6
,
9
6
,
9
2
7
,
7
1
6
M
A
4
2
1
-
4
/
1
2
4
6
4
0
1
4
2
0
2
3
,
4
1
3
,
5
0
,
8
2
1
4
,
5
1
3
1
6
5
9
5
0
,
5
0
,
7
1
2
3
,
5
1
5
3
8
5
3
1
,
8
1
8
,
4
0
,
6
0
1
7
,
5
1
7
5
9
,
5
3
4
,
5
M
A
4
2
2
-
4
/
1
2
4
1
0
4
0
1
4
1
0
3
6
,
8
2
1
,
3
0
,
8
6
2
4
2
1
,
5
2
4
7
1
4
3
0
,
8
1
,
0
1
2
3
,
5
1
5
4
4
5
2
8
,
9
1
6
,
7
0
,
5
4
2
2
2
2
6
9
4
0
M
A
4
2
2
-
6
/
1
2
6
1
0
2
5
9
3
0
4
9
,
5
2
8
,
5
0
,
6
9
3
4
3
1
,
5
2
3
0
1
3
3
0
,
8
1
,
0
1
2
3
,
5
1
5
4
4
5
2
8
,
9
1
6
,
7
0
,
5
4
2
2
2
2
4
0
4
0
M
A
5
2
1
-
4
/
1
6
4
1
3
4
0
1
3
7
5
4
2
,
5
2
4
,
5
0
,
9
4
2
5
2
3
1
3
0
1
3
0
0
,
3
2
,
9
1
6
3
,
5
1
5
2
8
5
2
6
,
8
1
5
,
5
0
,
6
2
5
2
5
3
0
3
0
324
Pentru puteri mici, aproximativ pn la 10kw, sistemele de comand cu contactoare i
relee prezint avantajul simplitii i al preului de cost redus deoarece pentru astfel de puteri
cantitatea de aparataj electric necesar este redus, ceea ce le confer o funcionare sigur i
pierderi relativ mici de energie.
La puteri mari, care depesc 10kw, se mrete considerabil cantitatea de aparataj
electric i ca urmare se mrete nesigurana n funcionare, pierderile de energie pe
rezistenele de pornire i reglare sunt mari, preul de cost crete de asemenea i de aceea
n astfel de cazuri, schemele de comand cu contactoare i relee nu se recomand. Pentru
astfel de puteri se folosete, de regul, sistemul generator-motor, generatorul de c.c. fiind
antrenat de un motor asincron.
n funcie de felul curentului de la bordul navei, continuu sau alternativ, i de
puterea necesar, motorul electric de execuie poate fi: de curent continuu cu excitaie
derivaie sau mixt, de curent alternativ de tip asincron n scurtcircuit cu o turaie pentru
puteri mici i cu dou turaii pentru puteri mai mari. Deoarece majoritatea navelor au
sistemul electroenergeic n curent alternativ, cu precdere se folsesc pentru acionarea
crmei motoare asincrone.
Scheme electrice de comand cu motoare de curent alternativ. n aceste scheme
pentru acionarea electric a crmei se folosete, de regul, motorul asincron n
scurtcircuit cu alunecare mrit (dubl colivie sau bare nalte) cu una sau dou viteze.
Motorul asincron cu rotor bobinat este mai rar ntlnit.
Motorul asincron n scurtcircuit cu alunecare mrit avnd una sau dou viteze se
ntrebuineaz pentru puteri pn la 8-10 kw.
Alimentarea circuitelor de comand ale acestor scheme se face fie n curent
alternativ, fie n curent continuu de la un redresor. Avantajul alimentrii circuitului de
comand n curent continuu const n faptul c releele de timp sunt mult mai simple
constructiv i robuste.
Schem de comand cu motor asincron cu o singur vitez.
n figura 7.18 este prezentat schema electric de comand cu motor asincron
avnd o singur vitez.
Elementele componente ale schemei din figura 7.18 sunt:
m1 - motor asincron n scurtcircuit cu alunecare mrit;
C1, C2 - contactoare de cuplare a motorului electric pentru rotirea crmei spre
tribord sau spre babord;
C3 - contactor de accelerare;
C4 - contactor de frnare;
d1, d2 - relee de timp de c.c.;
et1, et2 - relee termice pentru protecia motorului electric;
REM1, REM2 - bobine pentru revenirea electromagnetic a contactelor releelor
termice;
b1, b2 - butoane de comand;
b3 - buton pentru comanda revenirii contactelor releelor termice;
h1, h2, h3 - lmpi de semnalizare a poziiei crmei;
325
b4 - contactele limitatorului de curs;
m2 - transformator;
n - punte redresoare;
r - rezistene de pornire.
Se aplic tensiunea reelei de alimentare prin nchiderea ntreruptorului a. Se
aprinde lampa h2, lumin alb, indicnd poziia crmei n planul diametral, celelalte
elemente ale schemei rmn n poziia reprezentat n schem.
Pentru rotirea crmei spre tribord se apas pe butonul b1. Prin apsarea pe acest
buton se nchide circuitul de alimentare a contactorului C1 i acesta prin contactele sale
principale cupleaz nfurarea statoric la reea. Motorul pornete avnd conectate
rezistenele R de limitare a curenilor de pornire n serie cu nfurrile statorului.
n acelai timp se deschide contactul C1 (3-5) i se nchid contactele C1 (2-4) i C1 (6-8).
nchizndu-se contactul C1 (2-4), se stabilete circuitul de alimentare al releului d1 i
acesta dup un anumit timp i va nchide contactul d1 (2-4).
Temporizarea la nchidere a acestui contact se alege astfel nct regimul
tranzitoriu de scdere a curentului de pornire pn la valoarea normal s se termine. La
nchiderea contactului C1 (6-8) este alimentat releul d2 i contactul acestuia, d2 (2-4), se
nchide. Bobina contactorului de frnare C4 rmne n continuare nealimentat, deoarece
n circuitul su este deschis contactul C1 (3-5).
Dup un timp, se nchide contactul d1 (2-4) i este alimentat C3 care scurtcircuiteaz
rezistenele R, conectnd nfurarea motorului la ntreaga tensiune a reelei. Motorul
funcioneaz pe caracteristica lui natural i rotete crma spre tribord. Micarea dureaz atta
timp ct se ine apsat butonul b1.
Pentru oprire se elibereaz butonul b1 care revine n poziia normal. Prin acesta
se ntrerupe circuitul contactorului C1 i motorul este deconectat de la reea. Se nchide
contactul C1 (3-5) i se deschide contactul C1 (6-8) prin care se ntrerupe alimentarea
releului d2.
Pentru un anumit timp, dat de temporizarea la deschidere a contactului d2 (2-4),
se stabilete circuitul de alimentare a contactorului de frnare, C4, ale crui contacte
principale se nchid i cupleaz alimentarea n curent continuu a dou faze ale nfurrii
statorice. Motorul deconectat de la reea trece n regim de frnare dinamic. n rotorul
care se nvrtete sub aciunea forelor de inerie n cmpul magnetic constant dat de
curentul continuu ce trece prin cele dou faze ale nfurrii statorului se induc cureni
care vor da natere unui cuplu de frnare. Timpul de frnare se fixeaz prin reglarea
temporizrii la deschidere a contactului d2 (2-4).
Frnarea mecanic a motorului electric nu se ntrebuineaz n schemele de
acionare a crmei, deoarece nu poate avea o funcionare sigur datorit numrului mare
de conectri i deconectri pe or la care este supus motorul electricde acionare a crmei
n timpul exploatrii instalaiei de guvernare.
Dac n timpul rotirii crmei este depit unghiul maxim admis, se deschide
contactul limitatorului de curs, b4 (1-2), care ntrerupe circuitul contactorului C1.
Motorul electric este deconectat de la reea i trecut n regim de frnare dinamic cu toate
c apsarea pe butonul b1 continu.
Pentru rotirea crmei n cellalt bord se apas pe butonul b2 i se nchide circuitul
bobinei contactorului C2. Contactele principale ale acestuia conecteaz nfurarea
326
statorului la reea, cu dou faze inversate fa de cazul anterior. Prin aceasta sensul de
rotaie a motorului asincron se schimb i crma este deplasat spre bordul babord. n
continuare, funcionarea este aceeai ca n cazul rotirii crmei spre tribord.
Limitarea unghiului maxim de rotire a crmei i n acest caz este realizat de
contactele b4 (1-2) i b4 (3-4) ale limitatorului de curs.
Limitarea momentului de repaus sub curent n cazul motoarelor asincrone n
scurtcircuit se realizeaz prin msuri constructive, alegnd motoare cu alunecare mrit.
Protecia la suprasarcin este asigurat de releele termice, et, a cror acionare
este temporizat pentru a evita funcionarea lor la curenii de pornire sau suprasarcini de
scurt durat. La apariia unei suprasarcini care se menine, acioneaz unul sau ambele
relee i prin deschiderea contactelor et1 (3-5), et2 (3-5) motorul electric este scos din
funciune. Dup acionare, contactele rmn blocate n poziia deschis i pentru
readucerea lor n poziia normal (nchis) se apas pe butonul b3, sunt alimentate
bobinele de revenire electromagnetic, REM i acestea nltur blocajul mecanic i aduc
contactele n poziia iniial, normal nchis. n acelai timp, la apsarea butonului b3 prin
nchiderea contactului b3 (3-4) se anuleaz aciunea proteciei de suprasarcin. n acest
fel, n anumite situaii i pe o durat de timp limitat, se poate menine funcionarea
motorului electric n suprasarcin.
Schem de comand cu motor asincron cu dou trepte de vitez.
Comanda cu contactoare i relee n curent alternativ a acionrii crmei cu motor
asincron n scurtcircuit avnd dou trepte de vitez este prezentat n figura 7.19.
Statorul motorului asincron are dou nfurri separate, construite cu numr
diferit de poli.
Elementele componente ale schemei electrice de acionare sunt:
m1 - motor asincron n scurtcircuit cu dou trepte de vitez;
C1, C2 - contactoare de cuplare a motorului electric pentru rotirea crmei spre
tribord sau spre babord;
C3, C4 - contactoare pentru schimbarea treptelor de vitez;
C5 - contactor de frnare;
d - releu de timp;
et1 et4 - relee termice pentru protecie la suprasarcin;
REM1REM4 - bobine pentru revenirea electromagnetic a contactelor
releelor termice;
b(1-1)b(6-6) - contactele controlerului de comand;
b1 - contactele limitatorului de curs;
h1, h2, h3 - lmpi de semnalizare a poziiei crmei;
m2 - transformator;
n - punte redresoare.
327
Fig. 7.18 Schema electric de comand cu contactoare i relee a acionrii crmei cu motor asincron n
scurtcircuit avnd o singur vitez.
328
Dup aplicarea tensiunii de alimentare de la reeaua bordului, prin nchiderea
ntreruptorului a, situaia elementelor schemei nu se schimb fa de cea prezentat n
figura 7.19. Dac crma se afl n planul diametral este nchis contactul limitatorului de
curs b1 (7-8) i se aprinde lampa h2 de culoarea alb.
Pornirea, inversarea sensului de rotaie i oprirea motorului electric se fac cu
ajutorul controlerului de comand. Poziia 0 corespunde strii de repaus, poziia 1 -
funcionrii cu vitez mic, iar poziia 2 - funcionrii cu vitez mare.
Pentru deplasarea crmei n bordul tribord se pune maneta controlerului pe poziia 1 i se
nchid contactele b (1-1), b (3-3), b (6-6) i se deschide contactul b (5-5). Sunt
alimentate contactoarele C1 i C3 care cupleaz motorul electric la reea pentru
funcionare cu vitez minim, n sensul rotirii crmei spre tribord. Se deschid contactele
C1 (3-5) i C3 (3-5) care blocheaz funcionarea contactoarelor C2 i C4. Se nchide
contactul C1 (2-4) i se deschide contactul C1 (7-9). Prin contactele b (6-6) i C1 (2-4)
este alimentat releul de timp d care nchide contactul d (2-4). Contactorul C5 rmne n
continuare nealimentat ntruct n circuitul su sunt deschise contactele b (5-5) i C1 (7-
9). La trecerea controlerului pe poziia 2 se deschide contactul b (3-3) i se nchide
contactul b (4-4), este ntrerupt circuitul bobinei contactorului C3 i se nchide circuitul
bobinei contactorului C4. n circuitul principal al motorului se deschid contactele C3 i se
nchid contactele C4 prin care se conecteaz nfurarea corespunztoare vitezei mari.
Pentru oprire se aduce maneta controlerului n poziia zero. Se nchide contactul b (5-5),
se ntrerupe circuitul de alimentare a releului de timp d, ns contactul acestuia d (2-4)
fiind cu temporizare la deschidere nu se deschide imediat i pentru o anumit durat se
stabilete circuitul de alimentare a contactorului de frnare C5, care conecteaz
alimentarea a dou faze ale nfurrii statorului de la redresorul n. n aceast situaie,
motorul electric deconectat de la reea trece n regim de frnare dinamic. Timpul de
frnare dinamic este determinat de temporizarea la deschidere a contactului d (2-4).
Contactele C1 (3-5) i C2 (3-5) nu permit funcionarea simultan a contactoarelor
C1 i C2 constituind un blocaj electric ntre acestea. Acelai blocaj electric se aplic i
pentru contactoarele C3, C4 care nu trebuie s funcioneze simultan. Protecia la
suprasarcin este realizat de releele termice et. Releele termice de suprasarcin se
monteaz pe fiecare faz a nfurrii statorice sau numai pe dou faze, aa cum este
cazul din figura 15.26. Avndu-se n vedere c suprasarcina apare totdeauna cel puin
ntre dou faze, motorul electric este protejat suficient dac se monteaz relee termice
numai pe dou faze ale nfurrii sale. Protecia este mai sigur dac se pun relee termice
pe fiecare faz, deoarece n acest caz curentul de suprasarcin se nchide cel puin prin
dou relee termice i probabilitatea de funcionare a acestora este mai mare.
Dup ce au acionat, contactele releelor termice rmn blocate n poziia deschis.
Pentru revenirea lor n poziia normal nchis se apas pe butonul b2, sunt alimentate
329
bobinele REM1 REM4, care readuc contactele et n poziia iniial. i n acest caz la
apsarea butonului b2 se anuleaz, pe durata apsrii, protecia la suprasarcin i motorul
electric poate funciona n aceste condiii o anumit durat de timp. Schemele de
comand prin contactoare i relee a acionrii crmei se folosesc, de regul, pentru nave
mici costiere, portuare sau fluviale, care necesit puteri mici ale motorului electric de
acionare i reprezint o soluie simpl i sigur n funcionare pentru astfel de nave.
7.4.1.3 Scheme electrice de comand a crmelor cu funcionare sincronizat prin
sistemul generator-motor
La funcionarea sincronizat a crmei, unghiului de rotire al timonei determin
rotirea crmei cu un unghi egal sau proporional cu al timonei. Prin rotirea timonei cu
unghiul necesar ntr-unul din borduri, se pune n funciune sistemul de acionare i crma
ncepe s se roteasc. Cnd crma este rotit cu acelai unghi ca i timona, sistemul de
acionare se oprete automat.
Schemele de comand a acionrii electrice a crmelor cu funcionare
sincronizat au cptat o larg rspndire. Printre sistemele de urmrire folosite n astfel
de scheme se ntrebuineaz frecvent sistemul de urmrire poteniometric i sistemul de
urmrire cu contacte (un astfel de sistem se afl la Bricul Mircea).
Sistemul de urmrire poteniometric este prezentat, n principiu, n figura 7.20.
nfurarea de excitaie a excitatricei Ex este conectat n diagonala unei puni
poteniometrice, ntre punctele A i B. Contactul alunector B este cuplat mecanic cu axul
crmei, iar contactul alunector A este cuplat mecanic cu timona postului de comand.
Atunci cnd crma se gsete n planul diametral al navei i timona pe poziia
zero, contactele alunectoare A i B se situeaz astfel nct braele punii poteniometrice
sunt egale i tensiunea ntre punctele A i B este nul. Ca urmare, curentul n nfurarea
EI Ex este zero, tensiunea generatorului G este nul i motorul crmei, MC, se afl n
repaus. Prin rotirea timonei cu un unghi oarecare fa de poziia zero, se deplaseaz
contactul alunector A proporional cu unghiul de rotire al timonei i puntea
poteniometric se dezechilibreaz. ntre punctele A i B apare o tensiune a crei valoare
depinde de unghiul cu care s-a rotit timona. nfurarea EI Ex este parcurs de curent i la
bornele excitatricei apare o tensiune ce se aplic nfurrii EIG. Generatorul fiind excitat
produce energie electric cu care se alimenteaz motorul crmei MC i acesta la rndul
su va roti crma. Micarea crmei este transmis contactului alunector B, care se
deplaseaz astfel nct s fie restabilit echilibrul punii. Rotirea motorului electric, MC,
nceteaz atunci cnd pana crmei este rotit cu acelai unghi ca i timona i echilibrul
punii a fost restabilit.
n forma prezentat, schema din figura 7.20 nu permite folosirea integral a
puterii mainilor electrice.
330
Fig. 7.19 Schema electric de comand cu contactoare i relee a acionrii crmei cu motor asincron n
scurtcircuit avnd dou trepte de vitez.
331
Fig. 7.20 Schema de principiu a sistemului de urmrire poteniometric
Pentru deplasri mari ale timonei, tensiunea care se aplic motorului crmei are
valori mari i el funcioneaz cu parametrii apropiai de cei nominali. Pe msur ce se
reduce diferena ntre unghiul timonei i cel al crmei se micoreaz tensiunea aplicat
motorului crmei i n consecin se reduce turaia i puterea sa. O soluie de rezolvare a
fost oferit de firma german AEG care a realizat sistemul de urmrire cu contacte
reostatice, prezentat n.
7.4.2 Motoare electrice folosite pentru crme cu transmisie hidraulic
Caracteristicile mecanice necesare sunt determinate de particularitile transmisiei
hidraulice. Pentru acest tip de transmisie sunt necesare electromotoare cu caracteristica
rigid care asigur meninerea constant a turaiei pompei la modificri ale sarcinii.
n aceste condiii, pentru nave electrificate n curent continuu se folosesc motoare
de curent continuu, cu excitaie n paralel. Pentru nave electrificate n curent alternativ, care
constituie majoritatea navelor, se folosete motorul asincron n scurtcircuit cu alunecare
normal.
n cazul transmisiilor hidraulice, motorul electric este folosit pentru funcionare n
regim de lung durat cu turaie constant i cu sarcina variabil n funcie de debitul pe
care l realizeaz pompa.
Limitarea momentului de repaus al acionrii, n cazul stoprii crmei sau
ocurilor date de valuri, se realizeaz n acest caz prin sistemul transmisiei hidraulice. La
valori ale presiunii fluidului de lucru care depesc de 1,5 ori valoarea nominal,
acioneaz un sistem de valvule care limiteaz creterea presiunii.
Regimul de lucru de lung durat cu turaia constant este asigurat de motoare
sincrone. Utilizarea acestora permite, pe de o parte, asigurarea regimului de lucru al
pompei cu turaie constant, iar pe de alt parte, contribuie la mbuntirea factorului de
putere al reelii navei.
O schem de comand a acionrii electrice a pompelor este prezentat n figura
7.21.
Staia magnetic de comand a pompelor dispus n compartimentul crmei primete
alimentarea de la tabloul principal de distribuie (T.P.D.) prin dou circuite dispuse pe cele
dou borduri ale navei. Dac, din cauza unor defeciuni, un cablu de alimentare este scos din
332
funciune, automat se conecteaz cel de al doilea, de rezerv. Aceast operaiune este
efectuat automat prin contactoarele C1 i C2 prevzute cu blocare electric prin contactele
C1 (3-5) i C2 (3-5). n situaia normal, la aplicarea tensiunii de la TPD acioneaz unul din
contactoarele C1 sau C2, care are durata mai mic de anclanare i prin contactul su normal
nchis interzice cuplarea celui de-al doilea.
Alimentarea de la TPD se d pentru ambele motoare electrice ale pompelor cu
debit variabil, comanda i controlul funcionrii putndu-se face local, din
compartimentul crmei, i de la distan, de pe puntea de comand unde se afl instalat
pilotul automat.
Pentru pornirea local a motorului electric de acionare a pompei se pune
comutatorul a3 (a4) pe poziia L; este alimentat bobina contactorului C3 (C4) i motorul
electric m1 (m2) pornete prin conectare direct la reea. n cazul pornirii de la distan,
comutatorul a3 (a4) se pune pe poziia D i comanda pornirii se realizeaz prin apsarea
butonului cu reinere b1 (b2) de pe panoul postului de comand de la distan. Se aprinde
lampa de semnalizare h1 (h2) care indic funcionarea motorului m1 (m2). Este alimentat
releul d1 (d2) care prin deschiderea contactului d1 (3-5) [d2 (3-5)] ntrerupe alimentarea
releului de timp d3 (d4). De asemenea,este alimentat releul d5 (d6) care nchide contactul
d5 (2-4) [d6 (2-4)]. Soneria h5 nu funcioneaz ntruct este deschis contactul d1 (7-9)
[d2 (7-9)].
Protecia la suprasarcin a motorului electric acioneaz prin semnalizarea optic
i acustic fr deconectarea motorului electric de la reea. n cazul apariiei suprasarcinii
care se menine o anumit durat de timp, acioneaz releele termice et1, et3 (et2, et4).
Prin deschiderea unuia din contactele acestor relee este ntrerupt alimentarea releului d1
(d2), se nchid contactele d1 (3-5), d1 (7-9), [d2 (3-5), d2 (7-9)] prin care se alimenteaz
releul de timp d3 (d4) i soneria h5.
Releul de timp deschide instantaneu contactele d3 (3-5), d3 (7-9), [d4 (3-5), d4 (7-9)] i
ntrerupe alimentarea lmpii h1 (h2) i alimentarea bobinei proprii a releului d3 (d4).
Contactele releului, fiind cu temporizare la revenire, se vor nchide dup un timp
realiznd din nou alimentarea lmpii h1 (h2) i alimentarea bobinei proprii, dup care
instantaneu se deschid contactele i ciclul se repet astfel nct lampa h1 (h2)
funcioneaz prin plpire.
Semnalul sonor poate fi ntrerupt prin apsarea butonului b3. Se alimenteaz
releul d7 care prin deschiderea contactului d7 (3-5) ntrerupe soneria h5 i prin contactul
d7 (2-4) realizeaz automeninerea alimentrii releului d7.
Lampa de semnalizare h1 (h2) continu s plpie ct timp se menine
suprasarcina motorului electric.
n acest fel, apariia suprasarcinii nu conduce la scoaterea din funciune a instalaiei de
guvernare. Dac suprasarcina se menine, operatorul trebuie s ia msuri de pornire a
pompei de rezerv, ntreruperea funcionrii i efectuarea verificrilor necesare, deoarece
333
depirea unei anumite durate de funcionare n suprasarcin duce inevitabil la
supranclzirea i distrugerea motorului electric.
ntruct schemele electrice ale celor dou pompe sunt identice, pentru pornirea
motorului electric m2 se vor lua n considerare simbolurile din paranteze.
Protecia la scurtcircuit, n circuitele principale se realizeaz cu ntreruptoarele
automate a1 (a2) montate n staia magnetic, iar n circuitele secundare cu sigurane
fuzibile. Prezena tensiunii de alimentare este semnalizat de lampa h3 montat la postul
local, n compartimentul crmei i de lampa h4 montat n postul de comand la distan.
7.5 Alegerea i verificarea motorului electric de acionare
7.5.1 Calculul acionrii electromecanice a crmei
7.5.1.1 Generaliti
Calculul acionrii electrice conduce la alegerea motorului electric capabil s
satisfac n condiii optime regimul de funcionare a mecanismului crmei.
Puterea motorului electric se determin n funcie de: valoarea maxim a
momentului rezistent la axul crmei, timpul de deplasare a crmei i regimul de lucru al
instalaiei de guvernare dependent de regimul de manevr al navei. n ceea ce privete
regimul de manevr al navei, acesta poate fi:
1. regimul de manevr al navei pe drum variabil care se caracterizeaz prin
deplasri frecvente ale crmei dintr-un bord n altul.
2. regimul de meninere a navei pe drum constant, caracterizat prin frecvena mare a
deplasrilor crmei cu unghiuri mici (de obicei 4 la 6). Numrul de deplasri ale crmei n
acest regim depinde de: starea mrii, stabilitatea navei pe drum, experiena timonierului.
Registrul de clasificare RNR impune ca acionarea electric a crmei s fie capabil s
execute minim 350 de conectri pe or.
Calculul complet se compune din dou etape:
- prima etap const n alegerea preliminar a motorului electric. Se consider
funcionarea instalaiei crmei n regimul de manevr cu vitez constant i corespunztor
cuplului maxim la axul crmei i timpului impus de deplasare a crmei dintr-un bord n
altul, se calculeaz cuplul nominal i turaia nominal a motorului electric;
- n a doua etap se verific motorul electric ales, la nclzire, pentru cele dou
regimuri principale: regimul de manevr al navei i regimul de meninere a navei pe un
drum impus. n etapa a doua, avnd datele motorului electric ales preliminar, se execut
un calcul complet care ia n considerare i regimurile tranzitorii de accelerare i frnare.
7.5.1.2 Determinarea puterii nominale de calcul i alegerea motorului electric, n
prima etap (aproximare)
Cuplul de sarcin la axul motorului electric se calculeaz pe baza determinrii n
prealabil a caracteristicii momentului de sarcin la axul crmei i a aprecierii valorii
raportului de transmisie i a randamentului mecanismului de transmisie.
334
Fig. 7.21 Schema de comand a acionrii electrice pentru pompele instalaiei electrohidraulice de
crm.
335
Calculul hidrodinamic al crmei are ca rezultat detrminarea momentului de sarcin
la axul crmei. Raportul total de transmisie a diverselor lanuri cinematice, din transmisia
mecanic, este i = i
1
, i
2
, i
3
. . . Randamentul total al mecanismului de transmisi este, de
asemenea, egal cu produsul randamentelor elementelor legate n serie ntre eche i motor.
Cuplul nominal de calcul al motorului electric de acionare se calculeaz n
funcie de momentul de sarcin maxim la axul crmei M
amax
i coeficientul de
suprasarcin a motorului. Valoarea cuplului maxim la axul crmei se indic n datele
iniiale de proiectare sau se obine din calculul hidrodinamic al crmei. Se are n vedere
c la navele de vitez redus, avnd crma simpl, cuplul static rezistent la deplasarea
crmei dintr-un bord n planul diametral la mersul nainte poate fi mai mare dect cuplul
maxim de sarcin la axul crmei la mersul napoi. ntr-un astfel de caz se ia n calcul
cuplul maxim la mersul napoi.
Expresia cuplului nominal de calcul este:
i
M
M
max a
nc
unde:
M
amax
este cuplul de sarcin maxim la eche pentru mersul nainte al navei, cu
vitez maxim;
- este coeficientul de suprasarcin a motorului;
i - raportul de transmisie total al mecanismului de transmisie;
- randamentul total al mecanismului de transmisie.
Coeficientul de suprasarcin a motorului electric este cuprins n limitele 1,62,0
pentru motoare de c.c. i 1,21,4 pentru motoare de c.a. Avnd n vedere durata mic de
aciune a cuplului maxim n cadrul ciclului de funcionare a acionrii crmei, coeficientul
de suprasarcin se alege = 1,5.
Turaia nominal de calcul a motorului electric se determin pornind de la timpul
impus pentru bandarea crmei dintr-un bord n altul, de la tipul de crm i cel al
motorului. Determinarea turaiei nominale de calcul care s asigure timpul impus pentru
bandarea crmei se bazeaz pe ecuaia fundamental a micrii ansamblului motor
electric-transmisie, mecanic-mecanism de lucru, n regim staionar. n literatura de
specialitate sunt prezentate modelele matematice generalizate care descriu comportarea
motorului electric i respectiv mecanismul de lucru n regim staionar. Aceste modele
matematice descriu cu o bun aproximaie caracteristicile mecanice reale ale motoarelor
i caracteristicile cuplului static rezistent ale mecanismelor de lucru navale. n continuare,
se face o scurt prezentare a acestor caracteristici generalizate cu particularizare pentru
acionarea crmei.
Ecuaia generalizat a caracteristicii mecanice a motorului electric
Cu suficient exactitate, fa de caracteristica mecanic obinut dup datele din
catalog, se poate construi caracteristica mecanic a motorului electric cu ajutorul
urmtoarei expresii analitice, exprimat n uniti relative:
= (1-bm)
x
n care:
(7.36)
(7.37)
336
0
n
n
- viteza motorului exprimat n uniti relative;
n
M
M
m - cuplul motorului n uniti relative;
b - coeficient ce caracterizeaz alunecarea relativ a motorului;
x - exponentul caracteristicii mecanice a motorului.
Turaia, n
0
, reprezint turaia de sincronism n cazul motoarelor asincrone, sau
turaia de mers n gol ideal pentru motoarele de curent continuu cu excitaie derivaie sau
turaia motorului electric de c.c cu excitaie serie sau mixt la un cuplu de sarcin
M=(0,20,3)M
n
, respectiv n uniti relative m=0,20,3. Alunecarea, care este o turaie
exprimat n uniti relative, se obinuiete s se extindd i la motoarele de c.c. De pild,
alunecarea nominal a motorului de curent va fi:
0
n 0
n
n
n n
s
, (7.38)
Viteza relativ exprimat n funcie de alunecarea motorului este:
= 1 - s
Valorile exponentului caracteristicii mecanice, pentru diferite tipuri de motoare
electrice, sunt:
x = 1 - pentru motoare cu caracteristica mecanic linear (motoare de curent
continuu cu excitaie independent, motoare asincrone cu alunecare mic, pe poriunea
linear a caracteristicii);
x = 2 3 - pentru motoare electrice cu caracteristic mecanic moale, tip
hiperbol (motoare de curent continuu cu excitaie serie i mixt);
2
1
x - pentru motoare electrice asincrone cu alunecare mrit, cu dubl colivie
i pentru sistemul generator-motor.
Coeficientul b se determin din ecuaia (7.37) cu luarea n considerare a relaiei
(7.38), pentru condiia de funcionare la parametrii nominali: m = 1 (M = M
n
), s = s
n
(n = n
n
), i rezult:
( )x
1
n
s 1 1 b
Ecuaia cuplului static rezistent sub form generalizat, valabil pentru oricare
mecanism executor, este dat de relaia stabilit empiric, de forma:
( )
k
r
y
r
m q c m
+
n care:
n
r
r
M
M
m - momentul rezistent n uniti relative;
k
r
m
- momentul rezistent pentru
unghiul maxim de deplasare, n uniti relative; c i q - coeficieni care depind de condiiile
iniiale i finale; y - indicele caracteristicii mecanice a mecanismului de lucru; valoarea
relativ a unghiului de rotire.
(7.39)
(7.40)
(7.41)
337
Dac dependena cuplului static rezistent de unghiul nu conine maxime sau
minime pronunate, atunci:
k
iar n cazul n care caracteristica cuplului static rezistent are un maxim sau un minim
pentru
1
, atunci:
1 k
1
unde: este valoarea curent a unghiului de rotire;
k
valoarea final a unghiului de
bandare la sfritul cursei (
k
=
max
pentru acionarea crmei);
1
valoarea unghiului
parcurs la care m
r
() are extremul (la crmele compensate). Dac diagrama dse sarcin nu
are un extremum clar i se prezint ca o curb monoton variabil, atunci = /
k
.
Valoarea relativ iniial a poriunii liniare a drumului parcurs este =
k
/ (
k
1
). n
acest caz, cnd =0, parametrul = - / (
k
1
) = -
0
, iar cuplul de sarcin m
r
= m
0
. n
schimb, pentru =
k
, parametrul = 1, iar m
r
= m
r k
.
n figura 7.22 se reprezint caracteristica cuplului static rezistent pentru diferite
valori ale exponentului y. n cazul transmisiilor mecanice pentru acionarea crmei,
valorile exponentului sunt: y = 1 pentru crma simpl i y = 2 pentru crma compensat.
innd cont de condiiile iniiale i finale, din (7.41) se deduc valorile
coeficienilor c i q (s-a considerat y=2):
c 1 q ;
1
m
m
c
2
0
2
0
k
r
0
Fig. 7.22 Curbele m
r
= f (a ) pentru valori diferite ale exponentului y
(7.42)
(7.43)
(7.44)
338
unde: 3 , 0 1 , 0
M
M
m
n
0
0
este valoarea relativ a cuplului rezistent care corespunde
pierderilor de mers n gol, iar
n
ak
k
r
M i
M
m
- valoarea relativ a cuplului static
rezistent la sfritul cursei penei crmei.
Ecuaia sistemului de acionare electric n regim staionar
Pentru regimul staionar pe care l analizm 0
dt
dn
i corespunztor m = m
r
.
nlocuind n ecuaia (7.37) pe m cu m
r
dat de relaia (7.41), se obine:
( ) [ ]
k
r
x
y
0
m q c b 1
n
n
+
sau:
( )
x
y
0
B A
n
n
n care:
( ) c 1 bm B ; bcm 1 A
k
r
k
r
Ecuaia (7.46) reprezint ecuaia de micare a acionrii n regim staionar, sub
forma general, valabil pentru orice tip de motor i orice tip de mecanism de lucru.
Coeficienii A i B sunt coeficienii ecuaiei de micare i trebuie determinai pentru
fiecare caz particular n parte.
Alegerea motorului electric trebuie s corespund, pe de o parte, pentru
nvingerea cuplului rezistent, iar pe de alt parte, s asigure durata necesar pentru
procesul dat. Relaia care exprim dependena dintre unghiul de bandare a crmei i
turaia motorului este de forma:
2
i
k ;
k
n
k
n
i
n 2
dt
d
0
n care i este raportul de transmisie i turaia se exprim n rot/s.
Din relaia (7.49) rezult c durata deplasrii crmei din poziia iniial (din
P.D.), = 0, n poziia final
max k
, este:
(
k
0
k
n
d
k t
nlocuind n relaia (7.50) pe n cu valoarea lui dat de relaia (7.47), se obine:
( )
(
k
0
x
y
0
k
B A
d
n
k
t
(7.46)
(7.47)
(7.48)
(7.49)
(7.50)
(7.51)
339
n continuare, se face schimbarea de variabil cu avnd n vedere relaia
(7.43), astfel:
1 k
1
pentru = 0, rezult
0
; pentru =
k
, rezult = 1; iar prin difereniere se
obine
1 k
d
d
, de unde d = d (
k
-
1
).
Introducnd schimbarea de variabil n relaia (7.51), se obine:
1
0
x y
0
1 k
k
) B A (
d
n
) ( k
t ,
i avnd n vedere c ) ( ) 1 (
1 k k 0
+ , relaia devine:
( )
( )
(
1
x
y
0 0
k
k
0
B A
d
n 1
k
t
sau:
( )
(
,
_
d
A
B
1
A n 1
k
t
1
0
x
y
x
0 0
k
k
iar sub forma restrns,
x
y
0
k
k
n
k
t
n care:
( )
(
,
_
1
0
x
y
0
x
x
y
A
B
1
1 A
1
n notaia
x
y
prin cei doi indici se evideniaz c membrul drept din (7.55)
depinde att de tipul motorului prin x, ct i de diagrama de sarcin a crmei prin y.
Turaia nominal a motorului trebuie s asigure condiia de deplasare a crmei
dintr-un bord n cellalt n timp de 30 secunde, conform prevederilor registrului de
clasificare.
Timpul total de bandare a penei crmei dintr-un bord n cellalt, la marul nainte
al navei, este
pt 2 1
t t t T + +
unde t
1
- este timpul de bandare a crmei din planul diametral n bord; t
2
- timpul de
bandare al crmei din bord n planul diametral; t
pt
- durata proceselor tranzitorii. Pentru
calculele practice se poate aproxima t
pt
= 2s.
(7.52)
(7.53)
(7.54)
(7.55)
(7.56)
340
n baza relaiei (7.54), exprimnd unghiul de crm n grade, nlocuind turaia de
mers n gol n
0
n funcie de alunecarea nominal s
n
i avnd n vedere c
k
=
max
, se
poate scrie:
( ) ( )
x
2
y
n
n max
2
x
1
y
n
n max
1
n 360
s 1 i
t ;
n 360
s 1 i
t
nlocuind expresiile obinute n ecuaia (7.56), rezult:
( )
( )
pt
x
2
y
x
1
y
n
n max
t
n 360
s 1 i
T + +
sau:
pt
n
max
t
n 360
i
T +
unde:
( )( )
x
2
y
x
1
y n
s 1 +
Deoarece timpul total de bandare este o mrime cunoscut, impus de registrul de
clasificare, din expresia (7.59) poate fi obinut turaia nominal de calcul optim a
oricrui tip de motor electric.
( )
pt
max
nc
t T 360
i
n
Pentru motoarele cu rezisten sau bobin de reactan variabil (de exemplu,
amplificator magnetic) introdus permanent n circuit, turaia nominal optim de calcul
este:
( )( )
n pt
max
nc
s 1 t T 360
i
n
Deoarece motorul funcioneaz n aceste cazuri pe caracteristica mecanic
artificial i la cuplul nominal i micoreaz turaia, n formula (7.62) este introdus
factorul (1-s
n
) care ine seama de prezena rezistenei sau bobinei de reactan variabil.
La acionarea crmei cu motor asincron, turaia motorului este determinat de numrul de
poli ai nfurrii, de frecvena reelei i nu poate fi aleas ca mai sus. De aceea, pentru
astfel de motoare, din ecuaia (7.59) se afl raportul de transmisie:
( )
( )
1
x
2
y
x
1
y
max
0 pt
n t T 360
i
+
Practic, n funcie de tipul crmei i motorului, funcia are valori cuprinse n
limitele 1,2 ... 1,5. Valorile
x
2
y
x
1
y
si , folosite la acionarea electric a crmei, depind
de tipul crmei i al motorului electric. n urma calculelor efectuate, rezult:
1. Crma simpl, necompensat, y = 1.
a) Pentru x = 1 (motoare electrice asincrone cu rotor bobinat sau motoare de
curent continuu cu excitaie derivaie)
(7.57)
(7.58)
(7.59)
(7.60)
(7.61)
(7.62)
(7.63)
341
2
2 2
2
1
2
1
1 1
1
1
1
1
1
A
B A
ln
B
1
;
B A
A
ln
B
1 +
b) Pentru x = 2 (motoare de curent continuu cu excitaie serie sau mixt):
( ) ( )
2 2 2
2
2
1
1 1 1
2
1
1
B A A
1
;
B A A
1
+
c) Pentru x= 1/2 (sistemul generator-motor, sau motoarele asincrone cu
alunecare mrit)
( ) ( )
2 2 2
2
2
1
2
1 1 1 1
1
2
1
1
1
A B A
B
2
; B A A
B
2
+
n relaiile (7.64), (7.65) i (7.66)
( ) ( )
k
r 0 2 0
k
r 1 0 2 1
m m b B ; m m b B ; b m 1 A A
2. Crma compensat y = 2
a) pentru x = 1 se obine:
( )
( )
1
1
]
1
+
+
,
_
,
_
,
_
,
_
+
+
2
2
0
2
2
0 2 2
1
2
2
1
1
0
1
1
1
1
0
1
1
0 2 1
1
1
2
A
B
arctg
A
B
arctg
1 B A 2
1
A
B
1
A
B
1
A
B
1
A
B
1
ln
1 B A 2
1
b) Pentru x = 2 se obine
( )
( )( )
( )( )
( )
( )
1
]
1
+ +
+
+
1
1
]
1
+ +
+
+
+
3
2 2 0 2
2
0 2
2
2 0
2
2
2
0
2
2
2
2
2
1 0 1
1 0 1 1 1
2
0 1
2
1 0
1
2
1
0
2
1
2
1
2
arctg arctg
1 1 1 B 2
1
1 1
1 1
ln
2 1 1 1 B 2
1
c) Pentru x =
1
2
, se obine:
( )
( )
( )
+ +
+
+
+
2 0 2
2
0
2 2
0 2
2
1
2
2
1 0 1
0 1
2
1
1
2
1
1
ln
1 B
1
; arcsin arcsin
1 B
1
(7.64)
(7.65)
(7.66)
(7.67)
(7.68)
(7.69)
342
n expresiile (7.67), (7.68) i (7.69)
2
0
0
'
k
r
2
2
0
'
k
r
2
0 0
2
2
2
2
2
0
0
k
r
1
2
0
k
r
2
0 0
1
1
1
1
1
m m
b B ;
1
m m
b 1 A ;
A
B
1
m m
b B ;
1
m m
b 1 A ;
A
B
La bandarea crmei din bord n planul diametral, momentul rezistent are
valoarea:
'
k
r
'
k
r
m m
n care
1
2
'
exprim randamentul n cazul cuplurilor negative.
Alegerea motorului electric din catalog. Puterea nominal de calcul a motorului
electric, este:
[ ] w n M 28 , 6 P
nc nc
unde: M
nc
- cuplul nominal de calcul n Nm determinat cu relaia (7.36);
n
nc
- turaia nominal de calcul n rot/s, calculat cu relaia (7.61);
Factorul 6,28 = 2 transform unitatea de msur a vitezei din rot/s n rad/s.
Motorul electric trebuie ales din catalog, avndu-se n vedere urmtoarele:
puterea de calcul nominal a motorului; turaia nominal de calcul; execuia cerut
(protejat la stropi, la ap, ermetic etc.); regimul nominal (pentru acionrile electrice de
crm regimul nominal este de obicei regimul de scurt durat de 30 sau 60 min.);
izolaia nfurrilor; temperatura mediului ambiant etc.
Verificarea motorului electric ales
Dup ce motorul electric a fost ales se trece la a doua etap de aproximare n care
se efectueaz calcule de verificare privind satisfacerea regimurilor de lucru ale acionrii
crmei.
Calculul duratei ciclului de deplasare a crmei dintr-un bord n cellalt bord se
execut lund n considerare i regimul tranzitoriu de accelerare i frnare.
Timpul total de bandare a penei crmei dintr-un bord n altul este:
2 1 f a
t t t t T + + +
unde:
t
a
- timpul de accelerare;
t
1
- timpul de deplasare a penei crmei din bord n planul diametral pn la
nceputul frnrii;
t
2
- timpul de deplasare a penei crmei din planul diametral n bord dup terminarea
accelerrii;
t
f
- timpul de frnare.
Pentru calculul duratei regimului tranzitoriu de accelerare, se construiesc n
prealabil caracteristica natural a motorului electric ales i caracteristicile artificiale de
pornire. n figura 7.23 sunt reprezentate caracteristicile de pornire ale acionrii.
(7.70)
(7.71)
343
Se observ din figur c pentru toate tipurile de motoare electrice, caracteristicile
mecanice, n perioada pornirii, pot fi considerate, cu o bun aproximaie, liniare.
Fig. 7.23 Caracteristicile de pornire ale acionrii
Calculul timpului de accelerare se face n ipoteza c n perioada pornirii
caracteristicile mecanice sunt liniare i cuplul de sarcin este constant. Durata accelerrii
se mparte n dou perioade: t
a1
- timpul de accelerare pe caracteristicile mecanice
artificiale i t
a2
- timpul de accelerare pe caracteristica mecanic natural.
2 a 1 a a
t t t +
n figura 7.23 s-a notat: cu m
p
- valoarea relativ a cuplului de pornire; m
tr
-
valoarea relativ a cuplului la care se produce trecerea de pe o caracteristic pe alta;
p
,
tr
- turaiile relative care corespund acestor cupluri pe fiecare caracteristic.
Se noteaz:
n
0
m
M
kJn
2 T
Coeficientul k1,21,5 ine seama de momentul de inerie al acionrii.
Timpul de accelerare aproximativ poate fi calculat cu formula:
r medp
s
m a
m m
T t
, (7.74)
n care m
medp
=c(m
max
+m
p
) este cuplul de pornire mediu;
s
- turaia motorului
corespunztoare cuplului de sarcin m
r
.
Cuplul m
p
se alege astfel nct s se asigure accelerarea n cazul pornirii cu cuplul
maxim de sarcin i cderea maxim de tensiune admis 10%. Practic m
p
= 1,6 2,0.
Timpul t
a2
de accelerare a motorului pe caracteristica mecanic natural se poate
calcule cu relaia:
r 1
r p
m
r p
1 r
2 a
m m
m m
ln T
m m
t
, (7.75)
n care m
1
este cuplul care corespunde unei turaii
1
=0,950,97 pe caracteristica
mecanic natural.
(7.72)
(7.73)
344
Corespunztor cu (7.74) se determin timpul de accelerare pe caracteristicile
mecanice artificiale:
t
a1
=t
a
-t
a2
. (7.76)
Unghiul de rotire al penei crmei, exprimat n grade, pe durata accelerrii se
poate determina pornind de la relaia (7.49) scris sub forma:
i
n 360
i
n 2
i
n 2
dt
d
0 0
La accelerarea pe caracteristica artificial se consider constant viteza medie:
const
2
p tr
+
,
i se obine expresia pentru calculul aproximativ al unghiului de rotaie al penei crmei n
grade:
( )
1 a
p tr 0
1 a
t
i
n 180 +
n acelai mod, se calculeaz i unghiul de rotire corespunztor caracteristicii
mecanice naturale.
( )
2 a
r tr 0
2 a
t
i
n 180 +
Durata frnrii acionrii depinde, de asemenea, de tipul motorului i de schema
de frnare. Considernd c momentul de frnare, la frnarea dinamic (cel mai frecvent
utilizat), descrete liniar, timpul de frnare se calculeaz cu relaia:
r
f r
f
r
m fd
m
m m
ln
m
T t
+
n relaia (7.79) de obicei se ia m
f
= m
p
, iar cuplul de sarcin rezistent, m
r
, se ia
egal cu valoarea sa pentru unghiul maxim al crmei.
Exist o serie de expresii analitice pentru determinarea timpului de frnare
dinamic a unui motor asincron cu rotor n scurtcircuit. O asemenea formul
aproximativ, valabil la curent constant egal cu de dou ori valoarea nominal a
curentului din stator, este:
[ ] s 10
P c
n J k
44 , 1 t
5
n
2
n
fd
unde: t
fd
este timpul de frnare dinamic; k - coeficient care ine seama de momentul de
inerie al mecanismului de transmisie; J - momentul de inerie al motorului, n kg
.
m
2
; n
n
- turaia nominal, n rot/s; P
n
- puterea nominal a motorului, n kw. Pentru motoarele
electrice navale pn la 50kw, c=150.
Unghiul de bandare a crmei pe durata frnrii se determin la fel ca la
accelerare.
(7.77)
(7.78)
(7.79)
(7.80)
345
Timpul de bandare a crmei dintr-un bord n cellalt, dat cu aproximaie de
relaia (7.57), lund n considerare deplasrile din perioadele regimurilor tranzitorii de
accelerare i frnare se calculeaz cu relaiile:
( )( )
( )( )
x
2
y
cat n
n a max
2
x
1
y
cat n
n f max
1
n 360
s 1 i
t
n 360
s 1 i
t
Pentru determinarea mrimilor
x
y
x
y
2 1
i este necesar s se porneasc de la
valoarea din catalog a cuplului nominal M
n
i a turaiei nominale n
n
.
Motorul electric ales asigur timpul de bandare limit admis dac n urma
calculelor efectuate este ndeplinit condiia:
dat f 2 1 2 a 1 a
T t t t t t + + + +
Verificarea la nclzire a motorului electric ales se face pentru cele dou regimuri
principale: regimul de manevr a navei i regimul de meninere a navei pe un drum
impus. Verificarea se face dup metoda general a cuplului sau curentului echivalent.
Pentru verificarea motorului electric la nclzire n regimul de manevr a navei,
se construiete diagrama de sarcin a acionrii electrice a crmei prezentat n figura
7.24.
Diagrama de sarcin se construiete prin metode analitice sau grafice,
considernd c, cuplul de sarcin variaz liniar n funcie de unghiul de crm. La
deplasarea crmei de la
max
la 0 sau se consider m = m
0
= constant. Duratele
de accelerare, frnare i bandare a crmei dintr-un bord n altul precum i cuplurile care le
corespund se calculeaz pe baza relaiilor prezentate mai sus. Pentru cuplul de pornire m
p
se folosete valoarea sa medie pe timpul pornirii, m
p med
.
Fig. 7.24 Diagrama de sarcin liniarizat pentru regimul de manevr
Cuplul echivalent corespunztor diagramei de sarcin din figura 7.24 se
calculeaz cu formula:
(7.81)
(7.82)
m
rk
m
f
346
( )
( )
2
1
f
2
f
2
k
r
k
r 0
2
0
2
2
1
2
0
2
0 0 med p
2
med p
2 a
1 a
2
med p
echiv
T
t m
3
1
m m m m
3
t
t m
T
m m m m
3
t
t m
m
1
1
1
1
]
1
+ + + +
+
+ + +
Motorul electric ales satisface condiiile de nclzire pentru acest regim dac
valoarea cuplului echivalent calculat cu relaia (17.83) este subunitar sau cel mult egal
cu unitatea.
Pentru verificarea la nclzire a motorului electric n regim de meninere a navei
pe un drum impus, se determin n prealabil durata ciclului de funcionare din condiia de
asigurare a minimum 350 de conectori pe or, prevzut de registrul de clasificare:
or / conect 350 Z ;
Z
3600
t
z
Unghiul mediu de bandare a crmei corespunztor acestui regim este practic
o
K 6 4
z
. Unghiul de bandare corespunztor regimului stabil de funcionare este
f a z st
. Timpul corespunztor regimului stabil de funcionare este
aproximativ:
0 r
st
st
n 360
i
t
Pe baza datelor obinute se construiete diagrama de sarcin a acionrii crmei
pentru regimul de meninere a navei pe drumul impus, reprezentat n figura 17.25.
Cuplul echivalent corespunztor diagramei din figura 7.25 este:
( )
( )
0 1 st f a 2
f
2
f st
2
0
2
0 med p 0
2
med p
2 a
1 a
2
med p
echiv
t c t t t c
t m
3
1
t m m m m m
3
t
t m
m
+ + +
+ + + + +
Coeficienii c
1
i c
2
in seama de schimbarea condiiilor de rcire n perioada:
pauzei, t
0
; accelerrii, t
a1
, t
a2
; frnrii, t
f
. de obicei valorile acestor coeficieni sunt: c
1
= 0,5
... 0,35; c
2
= 0,8 ... 0,5.
Motorul electric ales satisface condiiile de nclzire pentru regimul de meninere
a navei pe drumul impus dac valoarea cuplului echivalent calculat cu relaia (7.86) este
subunitar sau cel mult egal cu unitatea.
(7.83)
(7.84)
(7.85)
(7.86)
347
Fig. 7.25 Diagrama de sarcin liniarizat pentru regimul de meninere a navei pe drumul impus
Verificarea motorului electric ales la numrul de conectri. Frecvena mare a
conectrilor care au loc n regimul de mar al navei, are o mare influen asupra nclzirii,
att a motoarelor asincrone cu rotorul n scurtcircuit, ct i a motoarelor de curent
continuu, avnd n vedere perioadele de accelerare i frnare n care curenii depesc
valorile nominale i faptul c pierderile n nfurri sunt proporionale cu ptratul
curentului. Din aceast cauz, motorul electric ales trebuie s fie verificat la numrul
admis de conectri pe or, la care temperatura medie a motorului nu va depi valoarea
admis.
Dac se cunosc puterile corespunztoare pierderilor variabile n nfurrile
motorului electric pentru: regimul nominal
n
P ; perioada de accelerare
a
P ; regimul
static de funcionare
st
P ; perioada de frnare
t
P , fcnd bilanul termic rezult:
( ) ( ) [ ]
p a st f f a a n
t t Z 3600 P Z t P t P P 3600 + + +
Bilanul termic dat de relaia (7.87) este scris n cazul n care condiiile de rcire
se consider aceleai pentru toate regimurile i ciclurile de funcionare se succed fr
pauz. Rezolvnd aceast ecuaie n raport cu Z rezult numrul total de conectri admis:
( )
( )
f a st f f a a
st n
t t P t P t P
P P 3600
Z
+ +
Pentru cazurile practice cnd se ine seama de rcirea din perioadele de pauz
precum i de nrutirea condiiilor de rcire, n perioadele de accelerare i frnare,
relaia de calcul a numrului total de conectri admis este:
(7.87)
(7.88)
(7.89)
348
( )( ) [ ]
( )( ) [ ]
n n 2 st f a f f a a c
0 1 n st n 0 c
P P c P t t t P t P t
t c P P P t t 3600
Z
+ + +
+
unde: c
1
- coeficient care ine seama de nrutirea schimbului de cldur n timpul
pauzei i care are valori n limitele de la 0,35 la 0,5;
c
2
- coeficient care ine seama de nrutirea schimbului de cldur n perioada
accelerrii i frnrii, dependent de forma de execuie a motorului i care are valori de la
0,5 la 0,8;
t
0
- timpul de pauz;
t
st
- timpul de funcionare n regim stabil;
t
a
i t
f
- timpii de accelerare i frnare;
t
c
- durata ciclului, s 3 , 10
350
3600
t
c
i corespunde numrului minim de cicluri.
Din relaia (7.9) rezult c, pentru mrirea numrului admis de conectri, este
necesar ca motorul electric s aib pierderi mici n regimurile tranzitorii, pierderi admise
mari n regimul nominal i un schimb de cldur mare n timpul pauzei. Micorarea
pierderilor n regim tranzitoriu se poate realiza prin utilizarea unui motor cu moment de
inerie mic i cu alunecare nominal mare. Mrirea pierderilor admise n regim nominal
se poate face prin utilizarea unei izolaii rezistente la temperaturi mari i prin ventilaie
intensiv. Utilizarea ventilaiei independente duce la creterea coeficientului c
1
pn la o
valoare egal cu unitatea. Din cele prezentate rezult c problema determinrii numrului
de cicluri admise const, n primul rnd, n determinarea pierderilor n perioada ciclului
de funcionare.
Pierderile totale
P n regim nominal pot fi calculate pe baza datelor din
catalog:
n
n
n
1
P P
. (7.90)
Considernd c pierderile constante i variabile din regimul nominal sunt egale,
se obine expresia pentru determinarea pierderilor variabile n regim nominal:
2
P
P
n
Pierderile variabile, n orice alt regim, vor fi proporionale cu ptratul valorii
medii ptratice a curenilor, n timpul regimului respectiv:
( )
2
med n
i P P
unde:
n
2
med
med
I
I
i
(7.91)
(7.92)
(7.93)
349
Cunoscnd pierderile din perioada unui ciclu, se calculeaz numrul total de
conectri Z.
Motorul electric ales corespunde din punct de vedere al numrului de conectri
dac valoarea lui Z obinut prin calcul este mai mare sau cel puin egal cu 350 (numrul
minim de conectri impus de cerinele registrului de clasificare RNR).
Metoda creterilor finite pentru calculul regimului tranzitoriu reprezint un
procedeu mai simplu utilizat practic n calculul acionrii electrice a crmei.
Ecuaia de micare a acionrii dat de relaia (15.45) se scrie sub forma:
dt
dn
M
J 2
m m
n
r
,
unde J este suma momentelor de inerie ale motorului i mecanismului de lucru.
n ecuaia diferenial a micrii, nlocuind derivatele cu creteri finite de valori
mici, n pentru turaie i t pentru timp rezult:
t
n
M
J 2
m m
n
r
Rezolvnd ecuaia (7.95) n raport cu , se obine:
( )
r n
m m M
n J 2
t
Pentru determinarea timpului t cu relaia (7.96) se alege o anumit cretere a
vitezei creia i corespunde, dup caracteristica mecanic a motorului, un moment de
valoare m. Valoarea momentului rezistent, m
r
, se obine dup curba ( ) f m
r
i
corespunde valorii iniiale a unghiului de nclinare a penei crmei. n continuare se
stabilesc dependenele ntre unghiul de nclinare a crmei, viteza de rotaie i timpul de
deplasare a crmei. Se pornete de la relaia (7.49) scris sub forma:
i
n 360
i
n 2
dt
d
a
n care:
- unghiul de rotire al penei crmei n grade;
a
- viteza unghiular de rotire a crmei;
i - raportul de transmisie al acionrii crmei; n - turaia n [rot/s].
Din relaia (7.97) se obine:
n 360
d i
dt
Introducnd n ecuaia (7.94), valoarea lui dt, rezult:
d
dn
n c
d
dn
i
n 360
M
J 2
m m
n
r
unde:
i
360
M
J 2
c
n
(7.94)
(7.95)
(7.96)
(7.97)
(7.98)
(7.99)
350
Relaia (7.99) scris sub forma creterilor finite n care la creterea unghiului cu o
valoare mic
j
corespunde creterea turaiei cu o valoare mic
j
n , are forma:
j
j
1 j r
n
n c m m
Rezolvnd ecuaia (7.100) raport cu
j
n se obine a doua formul de calcul
pentru creterea vitezei dat de creterea unghiului:
j
1 j
r
j
n c
m m
n
n care:
m - momentul la axul motorului electric corespunztor vitezei n
j
= n
j-1
+n
j
;
m
r
- momentul rezistent al acionrii corespunztor unghiului
j 1 j j
+
.
n relaia (7.98), nlocuind derivatele cu creteri finite i rezolvnd ecuaia n
raport cu t, se obine formula de calcul a duratei deplasrii pentru o cretere dat a
unghiului de rotire a crmei:
j med
j
j
n 360
i
t
unde:
2
n
n n
j
1 j j med
+
Timpul total de deplasare a crmei rezult:
n
1 j
j
t t
Relaiile obinute permit calculul practic al oricrui regim tranzitoriu al acionrii
atunci cnd se cunosc: caracteristica mecanic a motorului, momentul de inerie i
caracteristica momentului rezistent.
Algoritmul calculului dup metoda creterilor finite se prezint n continuare.
Pentru nceput, cunoscnd dependena momentului la axul crmei, ( ) f M
a
i folosind relaiile de calcul:
n
r
r
a
r
M
M
m ;
i
M
M
se determin caracteristica momentului rezistent la axul motorului electric n funcie de
unghiul crmei, ( ) f m
r
.
Se construiesc pe acelai grafic, aa cum se prezint n figura 7.26., curbele
( ) f m
1 r
, ( ) f m
2 r
pentru deplasarea crmei din bord n planul diametral i din
planul diametral n bord precum i caracteristicile mecanice ale motorului electric ales.
(7.100)
(7.101)
(7.102)
(7.103)
351
Pentru primul punct de calcul, din grafice se determin momentul rezistent m
r
,
corespunztor unghiului de 35
o
(dac deplasarea se face din bord n bord) sau oricrui unghi
cu care ncepe deplasarea crmei. Dup caracteristica mecanic a motorului (de exemplu
caracteristica artificial 3) se determin valoarea cuplului motorului m
1
pentru care viteza
de rotaie este nul.
Se alege o cretere mic a vitezei
1 1 1
n 0 n n se determin:
( )
1
r 1 n
1
n
m m M
J 2
t
i se calculeaz:
1
1
1
t
2
n
i
360
Fig 7. 26 Caracteristicile momentului rezistent i caracteristicile mecanice ale motorului electric
Pentru urmtoarele puncte se aleg creteri mici ale unghiului
j
i folosind
relaiile (7.101) (.102) se determin
j j
t ; n i t. Creterile
j
se aleg n aa fel
nct creterile momentului rezistent ntre dou puncte succesive s nu fie prea mare.
Rezultatele calculelor se trec ntr-un tabel de forma:
Tabel 7.4
N
j
m
rj
m
j
n
j
n
j
n
med j
t
j
t
j
m t
j j
2
m t
j j
2
1 0,0095 34,9905 0,15 1,6 1,17 1,17 - 0,1 0,1 0,256 0,256
2 0,0105 34,98 0,15 1,45 0,58 1,75 1,46 0,045 0,145 0,094 0,35
3 0,02 34,96 0,15 1,38 0,7 2,45 2,1 0,059 0,204 0,113 0,463
M
Pentru intervalele mici de timp, din diagrame se determin cuplul motorului, se
calculeaz t m
2
j
i prin nsumare se obine cuplul echivalent pentru verificarea motorului
electric la nclzire:
352
j
j
2
j
echiv
t
t m
m
Determinarea cuplurilor medii echivalente n timpul accelerrii i frnrii permite
totodat calculul perioadelor variabile n aceste regimuri tranzitorii:
2
a . echiv n a
m P P
P P m
f n echiv.f
2
necesare la determinarea numrului admis de conectri.
n figura 7.26 curba 1 reprezint caracteristica mecanic natural, curbele 2 i 3
caracteristici mecanice artificiale, iar curba 4 caracteristica mecanic pentru regimul de
frnare dinamic.
7.5.2 Calculul acionrii electrohidraulice a crmei
n acionrile electrohidraulice cu pompe de debit variabil sau debit constant,
motorul electric funcioneaz n regim de lung durat. Sensul de rotire i viteza de
deplasare a crmei sunt determinate de sensul de circulaie i debitul fluidului de lucru
care se regleaz prin poziia manipulatorului pompei de debit variabil.
Calculul acionrii electrohidraulice a crmei cuprinde urmtoarele etape:
determinarea forelor de presiune n cilindrii presei mainii hidraulice;
stabilirea parametrilor de baz ai instalaiei i alegerea pompei de debit
variabil;
calculul puterii i alegerea motorului electric;
verificarea motorului electric ales pentru realizarea timpului dat de deplasare
a crmei i la nclzire.
Determinarea forelor de presiune n cilindrii presei mainii hidraulice. Atunci
cnd crma este deplasat fa de planul diametral, asupra penei crmei acioneaz fora
de presiune a curentului de ap, care prin axul crmei i eche se aplic la pivotul mufei
articulate. Aceast for, notat cu F n figura 7.27 este orientat perpendicular pe axa
echiei.
n afara forei F, la funcionarea mainii crmei apar fore de frecare n reazemele
axului crmei, n articulaii i suprafeele alunectoare ale mainii hidraulice. Toate aceste
fore orientate n sens opus micrii mpreun cu componenta F
y
constituie fora
rezistent F
r
.
Pentru a asigura deplasarea crmei, n cilindrii mainii hidraulice se creeaz o
for de presiune F
ci l
, capabil s nving fora rezistent.
(15.114)
(7.105)
(7.106)
353
Fig. 27 Forele care acioneaz n sistemul hidraulic al acionrii crmei
Fora F se descompune n dou componente:
F
x
- orientat perpendicular pe axa cilindrilor;
F
y
- orientat dup axa cilindrilor mainii crmei.
Ecuaia de echilibru a forelor pe axa cilindrilor este:
F N F 2 F F F
2 x 1 y r cil
+ + +
sau, n funcie de F i rezult:
( )
F N sin 2 cos F F F
2 1 r cil
+ + +
n care:
1
- coeficient de frecare n articulaii i suprafee alunectoare pe direcia
tijelor;
1
= 0,08 0,1;
2
- coeficient de frecare n presetupele tijelor (pentru garnituri obinuite
2
=
0,2, pentru garnituri din piele
2
= 0,07 0,13);
N - reaciunea forei de greutate a tijelor mainii hidraulice determinat
constructiv de tipul mainii hidraulice; orientativ, masa mainilor
hidraulice raportat la momentul maxim la axul crmei este n limitele 20
40kg/kNm;
F - fora de frecare n presetupele cilindrilor mainii hidraulice, care depinde
de materialul garniturilor i presiunea n cilindri.
Fora de frecare
F poate fi determinat cu formula empiric:
[ ] N p h D 47 , 1 F
2
unde: D - diametrul cilindrilor presei, m;
p - presiunea n cilindrul presei, P
a
;
h - nlimea garniturii presetupei, care se alege din tabelul 7.5.
(7.107)
(7.108)
(15.109)
354
Tabelul 7.5
Etanarea
Diametrul cilindrului, D
[m]
nlimea garniturii, h
[m]
Garnitur moale (obinuit) 0,090
0,091-0,140
0,141-0,406
peste 0,406
0,077
0,128
0,200
0,250
Manet din piele obinuit 0,089
0,090-0,254
0,255-0,457
0,458-0,711
peste 0,711
0,010
0,018
0,024
0,034
0,040
Manet unghiular din piele
(unghiul =90)
0,089
0,090-0,254
0,255-0,457
0,458-0,711
peste 0,711
0,015
0,023
0,029
0,039
0,048
Fora F poate fi exprimat n funcie de momentul la axul crmei, astfel:
cos
zR
M
zR
M
F
a 0
a
a
a
n care:
z - numrul de perechi de cilindri ai mainii hidraulice;
R
0
- distana de la axul crmei la axul tijelor [m]; n funcie de diametrul
cilindrului aceast distan este ( )D 3 2 R
0
;
a
- randamentul care ine seama de pierderile n lagrele axului crmei:
87 , 0 8 , 0
a
.
Introducnd expresia forei F dat de relaia (7.110) n relaia (7.108) se obine:
( )
+ + +
F N 2 sin cos
zR
M
F
2 1
2
a 0
a
cil
Calculul parametrilor de baz ai instalaiei i alegerea pompei de debit variabil. n
mod obinuit n mainile de crm, presiunile nominale au valorile:
pentru maini de crm cu pistoane i cilindri:
[ ] [ ]
a
5 2
n
P 10 1 , 98 7 , 68 cm / kgf 100 70 p
pentru maini de crm cu palete:
[ ] ( )
a
2 2
n
98.067P 1kgf/cm kgf/cm 60 p
Exprimnd fora de presiune n cilindru n funcie de diametru, rezult:
[ ] N p
4
D
F
2
cil
(7.110)
(7.111)
(7.112)
355
Din relaiile (7.111) i (7.112) se poate determina diametrul cilindrului D al
mainii hidraulice pentru condiia de sarcin maxim:
( )
1
]
1
+ +
N 2 sin cos
zR
M
p
4
D
2 max 1 max
2
a 0
max . a
max
n deducerea relaiei (7.113), fora de frecare
F a fost neglijat ntruct influena
ei asupra rezultatelor calculelor este nesemnificativ.
Volumul de ulei transvazat, V, la deplasarea maxim a crmei este:
[ ]
3
max 0
2
m tg R 2
4
D
z V
unde
max 0
tg R 2 reprezint deplasarea maxim a tijelor n limita unghiului [ ] m , 2
max
.
Debitul mediu al pompei este:
[ ] s / m
' T
V
Q
med
n care:
T = T - t
0
- timpul de funcionare al pompei, [s];
T - timpul total de deplasare a crmei, [s];
t
0
= 2 3 [s] - timpul de pregtire al sistemului pentru funcionare.
Lund n considerare neuniformitatea curgerii, debitul nominal al pompei este:
Q
med
n
k
Q
Q
unde k
Q
= 0,7 0,8 este un coeficient care ine seama de neuniformitatea curgerii.
Cunoscnd debitul nominal i presiunea maxim se poate alege dup catalog
pompa cu debit variabil necesar pentru instalaia electrohidraulic de acionare a crmei.
Calculul puterii i alegerea motorului electric de acionare a pompei. Puterea
motorului electric se determin n funcie de debitul i presiunea pe care trebuie s le
asigure pompa. Deoarece aceste mrimi nu sunt constante pe timpul funcionrii
acionrii electrice a crmei, pentru calculul puterii motorului electric se adopt valorile
medii obinute pe durata unui ciclu de deplasare a crmei dintr-un bord n cellalt bord.
Debitul mediu al pompei se determin cu relaia (7.115).
Din relaiile (7.109), (7.111), i (7.112), dup efectuarea unor calcule, se
determin expresia presiunii:
( )
( ) h 88 , 5 D D 25 , 0
N 2 sin cos
zR
M
p
2
2 1
2
a 0
a
+ +
Pe baza relaiei (7.117) se construiete graficul dependenei ( ) f p . Pentru
fiecare valoare a unghiului de deplasare a crmei, valorile momentului M
a
se obin din
graficul ( ) f M
a
.
(7.113)
(7.114)
(7.115)
(7.116)
(7.117)
356
Fig. 7.28 Determinarea grafic a presiunii medii a pompei:
a - crma simpl; b - crma compensat
n figura 7.28 cu linie plin se prezint graficele ( ) f p i cu linie ntrerupt
( ) f M
a
, pentru crma simpl i compensat.
Pentru poziia crmei n planul diametral, = 0, momentul la axul crmei este
nul, M
a
= 0 i acionarea electric dezvolt un cuplu numai pentru nvingerea forelor de
frecare din transmisia hidraulic. n acest caz, presiunea necesar n cilindrii mainii
hidraulice este:
( ) h 88 , 5 D D 25 , 0
N
p
2
2
0
La valori negative ale momentului la axul crmei, pentru un unghi
0
(de mrime
cteva grade), momentul forelor de frecare este echilibrat de mrimea momentului
negativ la axul crmei i presiunea n cilindrii mainii hidraulice se anuleaz, iar motorul
electric funcioneaz n gol.
Pentru calculul presiunii medii se mparte suprafaa delimitat de curbele
( ) f p n mai multe domenii, se aproximeaz suprafeele domeniilor i prin nsumare
rezult suprafaa total de sub curb. Presiunea medie se determin cu relaia:
max
p
med
A
p
n care A
p
este suprafaa delimitat de curba ( ) f p i calculat din grafic n P
a
grade.
Cunoscnd valorile medii ale debitului i presiunii create de pomp, se poate
calcula puterea motorului electric cu formula:
( )
[ ] kW
p p Q 10
P
pomp
f med med
3
n
unde: p
f
= (3440)10
4
P
a
- pierderi de presiune prin frecri n tubulaturile sistemului;
(7.118)
(7.119)
(7.120)
357
pompa
=0,4- 0,8 - randamentul pompei
Alegerea motorului electric se face pe baza puterii nominale calculat i a turaiei
care rezult din caracteristicile tehnice ale pompei aleas n etapa anterioar.
Verificarea acionrii electrice privind durata de deplasare a crmei. Aceast durat
depinde de debitul pompei care poate fi definit n mai multe feluri:
Q
inst
- debitul instalat sau debitul maxim pe care pompa l asigur la
funcionarea cu vitez nominal pentru unghiul dat de nclinare a manipulatorului pompei
i n condiiile n care se consider c volumul fluidului de lucru absorbit este egal cu
volumul refulat, pierderile prin transvazarea invers fiind nule;
Q
t
- debitul teoretic se obine pentru aceleai condiii ca i debitul instalat,
ns corespunde unei viteze diferite de viteza nominal:
n
inst t
Q Q
- debitul real al pompei ine seama de micorarea debitului pompei ca
urmare a transvazrii inverse a fluidului de lucru:
vol
n
inst vol t
Q Q Q
Coeficientul de volum,
vol
, depinde de valoarea presiunii de lucru i se
determin din graficul ( ) p f
vol
reprezentat n figura 7.29.
Fig. 7.29 Dependena coeficientului de volum n funcie de presiune i nclinarea manipulatorului
pompei
Din caracteristicile tehnice ale pompei se cunoate debitul pentru viteza nominal
Q
inst
. n figura 7.30 se prezint diagrama debitului instalat al pompei pentru regimurile de
deplasare a crmei din bord n bord.
Prin rotirea timonei pentru deplasarea crmei dintr-un bord n cellalt bord,
servomotorul ncepe s deplaseze poziia manipulatorului pompei i debitul instalat crete
liniar de la zero la valoarea nominal.
(7.121)
(7.122)
358
Fig. 7.30 Diagramele debitului instalat i debitului real al pompei pentru deplasarea crmei din bord
n bord
Pe durata creterii debitului, crma se deplaseaz cu un unghi n limitele 3 - 5. n
continuare, pe durata deplasrii crmei, debitul instalat are valoarea nominal constant. La
sfritul cursei, cnd au mai rmas 3 - 5 pn la poziia
max
35
o
, sistemul de urmrire
ncepe deplasarea manipulatorului spre poziia de debit nul i ca urmare debitul instalat
descrete liniar de la valoarea nominal la zero.
Pentru a calcula debitul real al pompei trebuie cunoscut viteza real de rotaie .
Din relaiile (7.120) i (7.122) rezult c pentru o valoare a unghiului , puterea este dat
de expresia:
( ) ( )
n mec H
f inst
pomp
f
p p Q p p Q
P
+
n care:
Q
, p
- debitul real, m
3
/s i presiunea de lucru P
a
, corespunztoare unghiului de
deplasare a crmei;
H
- randamentul hidraulic al pompei,
H
= 1;
mec
- randamentul mecanic care ia n considerare pierderile prin frecare a
componentelor pompei.
Valoarea randamentului mecanic este variabil n funcie de viteza relativ /
n
,
i se determin din graficele prezentate n figura 7.31.
Dup valoarea puterii pentru unghiurile de deplasare a crmei se pot determina
momentele corespunztoare, cu formula:
( )
n mec H
f inst
p p Q P
M
+
n care
n
este viteza nominal pentru care s-a construit curba ( ) f Q
inst
.
(7.123)
(7.124)
359
Fig. 7.31 Dependena randamentului mecanic de viteza unghiular pentru nclinarea manipulatorului
n poziia de debit maxim, 100%
Pentru valorile calculate ale momentului, din caracteristica mecanic a motorului
electric se obin vitezele corespunztoare i se calculeaz cu relaia (7.122) debitul real
reprezentat n figura 7.30 prin curba ( )
f Q .
Calculul se execut analitic i grafic. Curbele de variaie a parametrilor se mpart
n domenii mici n care se consider constant valoarea medie a parametrului. Rezultatele
calculului se trec n tabelul 7.6.
Tabel 7.6
Nr. Domeniul unghiului H
i
[m]
V
i
[m]
Q
med i
[m
3
/s]
t
i
[s]
1
0
-
1
Semnificaia notaiilor din tabelul 7.6 este:
H
i
- deplasarea tijei pistoanelor pentru variaia unghiului crmei de la
i-1
la
i
;
V
i
- volumul uleiului transvazat n limitele domeniului i, care se calculeaz cu relaia:
i
2
i
H
4
D
z V
Q
med.i
este debitul mediu real n limitele domeniului i;
t
i
- durata deplasrii crmei de la
i-1
la
i
care se calculeaz cu relaia:
i . med
i
i
Q
V
t
Pentru calculul deplasrii tijei pistoanelor, H
i
, n figura 7.32 se prezint mai
multe unghiuri de nclinare a echei.
(7.125)
(7.126)
360
Fig. 7.32 Deplasarea tijelor pistoanelor mainii hidraulice la diferite unghiuri de nclinare a crmei
De exemplu, pentru variaia unghiului de nclinare de la
0
la
1
rezult
( )
1 0 0 1
tg tg R H .
Motorul electric ales corespunde din punct de vedere al realizrii duratei limit de
deplasare a crmei dintr-un bord n cellalt dac se ndeplinete condiia:
+
n
1 i
0 i
s 30 T t t
n care T = 30s este timpul impus de registrul de clasificare RNR.
Verificarea motorului electricpompei la nclzire. Se face numai pentru regimul de
manevr. Motorul electric pentru transmisia hidraulic funcioneaz n regim continuu de
lung durat i spre deosebire de cazul transmisiilor mecanice nu este supus la conectri i
deconectri cu frecven mare care produc nclziri datorate curenilor mari de pornire i
frnare din perioadele de regim tranzitorii. De asemenea, n regimul de meninere a drumului
constant, deplasarea crmei se face cu unghiuri mici, pn la 5, pentru care pompa cu debit
variabil i motorul electric de acionare funcioneaz n regim apropiat de regimul de mers n
gol i ca urmare pierderile care se transform n cldur sunt de valori reduse.
Verificarea la nclzire pentru regimul de manevr cnd crma se deplaseaz din
bord n bord, n limita unghiurilor maxime,
max
t , i pentru viteza nominal de mar
nainte a navei se poate face prin mai multe metode. O metod simpl i suficient de
precis este metoda de verificare pe baza bilanului termic.
Corespunztor acestei metode, motorul electric ales corespunde din punct de
vedere al nclzirii dac pierderile pe or ale motorului electric pentru regimul nominal de
lung durat sunt mai mari sau cel puin egale cu pierderile pe or ale motorului electric
pentru regimul real de lucru. Aceast condiie se scrie sub forma:
( )
+ +
t
0
0 med 0 n
P Zt 3600 dt P Z ZE E P 3600
n care:
P
n
- pierderile de putere nominale, w, care se determin din datele nominale
ale motorului:
(7.127)
(7.128)
361
n
n
n
n
P
1
P
, (7.129)
E
0
- energia pierdut de motorul electric n timp de 1 or la mersul n gol,
[jouli]:
( )
0 med 0
P Zt 3600 E
Z - numrul ciclurilor de deplasare a crmei dintr-un bord n altul timp de 1
or; se obine mprind 3600s la durata unui ciclu dat de relaia (7.127);
med
t
- durata deplasrii crmei pn la unghiul
med
, [s] (se determin din
tabelul 7.6);
0
P - pierderile de putere ale motorului la deplasarea invers a crmei pentru
revenirea n planul diametral (pierderi de mers n gol), [w]:
0
0
0
0
P
1
P
P
0
- puterea de mers n gol a motorului, w: ( )
n 0
P 3 , 0 2 , 0 P
E - pierderile de energie datorate lucrului util n perioada deplasrii directe
a crmei, din planul diametral n bord (pentru deplasarea invers
motorul electric lucreaz n regim de mers n gol), [jouli]:
t
0
dt P E
P - pierderile de putere ale motorului electric la deplasarea direct a crmei.
Calculul pierderilor de energie datorate lucrului util se face pe cale grafic. Se
determin graficul funciei ( ) f P folosindu-se n acest scop graficele
( ) ( )
f Q si f p . Din aceste grafice pentru diferite valori ale unghiului n
limitele de la 0 la
max
se determin
inst
Q , Q , p
i folosind relaia (7.123) se calculeaz
puterea P obinndu-se n final curba ( ) f P reprezentat n figura 7.33.
Fig. 7.33 Curbele pentru calculul puterii pierderilor motorului electric de acionare a pompei
(7.130)
362
Pentru fiecare valoare momentan a puterii se calculeaz pierderile cu relaia:
P P
1
n care este valoarea momentan a randamentului determinat dup curba
( ) f P
pentru motorul electric ales sau se calculeaz cu relaia:
b 1
1
1
1
n
,
_
+
n care:
n
- randamentul nominal;
a 1
x
a
x
b
+
+
- mrime de calcul;
n
P
P
x - gradul de ncrcare al motorului;
var
const
P
P
a
- raportul pierderilor constante i variabile, 1 5 , 0 a pentru
motoare cu vitez mic, 2 1 a pentru motoare cu vitez mare, pentru motoare folosite
la acionarea crmei a = 1.
Pe baza datelor obinute se construiete graficul ( ) f P . Folosind datele din
tabelul 7.6 n care pentru intervale mici de variaie a unghiului se dau timpii, se
reprezint graficul funciei ( ) t f P din figura 7.34.
Fig. 7.34 Metoda grafic de determinare a pierderilor de energie
Suprafaa de sub curba ( ) t f P reprezint energia pierderilor datorate lucrului
util. Pentru calcul se mparte curba n domenii mici, t
, se calculeaz suprafeele
elementare i prin nsumare se obine valoarea energiei E:
(7.131)
363
( )
+ + + + t P P P P E
n 2 1 0
K
Motorul electric ales corespunde din punct de vedere al nclzirii dac este
ndeplinit condiia (7.128).
Aplicaii
Problem rezolvat
Pentru nava cu L=121,34 (m), T=7,50(m) i v=16Nd=8 m/s, se cere s se
calculeze diagrama de sarcin M=f() la marul nainte.
Soluie
Se calculeaz suprafaa crmei cu relaia:
A=LT n care =0,015-0,025. Suprafaa crmei trebuie s fie cuprins ntre
limitele A
1
=0,015*121,34*7,50=13,65 m
2
i A
2
=0,025*121,34*7,5=22,75 m
2
.
Conform RNR suprafaa minim a crmei trebuie s fie:
2
min
m 77 , 13 )
75 L
150
75 , 0 (
100
LT
q p A
+
+ .
S-a considerat =0,02 i s-a adoptat valoarea A=18,00 m
2
. Se constat c A>A
min
.
Pentru determinarea nlimii crmei s-a folosit relaia (7.4): h=T-(0,51)m. S-a
adoptat valoarea h=6m. S-a considerat o crm compensat conform cu fig. 7.6. II.
Limea crmei:
B=A/h=18/6=3m. S-a ales valoarea coeficientului de compensare k=0,25 i a
rezultat suprafaa prii compensate a crmei A
1
=0,25 A=4,5 m
2
. Corespunztor cu figura
7.6. II, distana b
1
=A
1
/h=4,5/6=0,75m.
Alungirea relativ a crmei este:
=h/b=6/3=2. Valoarea obinut se ncadreaz n limitele =0,53,0.
Se adopt profilul hidrodinamic NEJ-15, care pentru marul nainte, =2, este
caracterizat de coeficienii hidrodinamici [3]:
o
0 4 8 12 16 20 24 28 32 36
C
x
0,0081 0,0154 0,0368 0,0685 0,116 0,170 0,258 0,337 0,380 0,390
C
y
0 0,168 0,358 0,555 0,750 0,925 0,990 0,850 0,705 0,590
C
P
0 0,203 0,221 0,234 0,242 0,250 0,281 0,358 0,371 0,386
Folosind relaia (7.15):
2
v A
) sin C cos C ( R
2
x y
+ [N]
se determin fora R pentru unghiurile de crm , dup care se determin cuplul la ax
folosind relaia (7.21):
M
a
=R(C
P
b-b
1
) [Nm].
Rezultatele sunt prezentate n tabelul de mai jos:
o
0
4 8 12 16 20 24 28 32 36
R[N]
0 96804 206784 320256 432576 533376 580032 522432 563328 433728
M
a
[Nm]
0 -13649 -17990 -15372 -10381 0 53942 169267 204488 176961
(7.132)
364
Se reprezint grafic diagrama de sarcin la marul nainte M
a
=f().
Diagrama M
a
=f()
365
ACIONAREA ELECTRIC A MECANISMELOR AUXILIARE
8.1 Generaliti
Mecanismele auxiliare ale instalaiilor de for i sistemelor navale sunt:
pompele, ventilatoarele i compresoarele. Acestea constituie pe nav grupul cel mai
important al consumatorilor de energie electric, ajungnd la aproape 50% din totalul
energiei consumate. Pe nave speciale cum ar fi tancurile petroliere, navele frigorifice,
unde astfel de mecanisme ndeplinesc funcii productive, procentul de energie electric
consumat este mai mare.
Toate aceste mecanisme auxiliare au o mare importan pentru nav i sunt
destinate pentru:
1. deservirea principalelor instalaii energetice ale navei. Din aceast categorie
fac parte, n primul rnd, pompele cu destinaii diferite: combustibil, ulei, rcire,
alimentare, circulaie .a.
2. navigaia fr pericol care const n:
stabilitatea navei - se asigur prin funcionarea pompelor de transvazare a
apei, combustibilului i ncrcturilor lichide n scopul asietrii navei i aezrii ei pe
chil dreapt;
plutirea navei - se asigur prin funcionarea pompelor care arunc peste
bord apa din compartimentele inundate;
protecia mpotriva incendiilor realizat pe seama funcionrii pompelor de
stins incendii;
manevrabilitatea navei prin folosirea crmei cu acionare electrohidraulic a
crei funcionare se bazeaz pe pompele din compunerea instalaiei;
3. crearea condiiilor normale de munc i odihn pentru echipaj. n aceast
categorie o importan deosebit o au ventilatoarele pentru asigurarea condiiilor de
mediu: temperatur, umiditate i pompele de ap potabil i sanitar;
4. pstrarea n siguran a mrfurilor. Pe navele moderne funcioneaz instalaii
de climatizare care asigur temperatura i umiditatea necesar pentru pstrarea mrfurilor
pe durata transportului cu nava.
Pe navele speciale, cum ar fi tancurile petroliere, pompele care ndeplinesc funcii
productive sunt de putere mare i asigur manipularea mrfii n stare lichid, indeplinind
un rol similar cu cel al vinciurilor de ncrcare de pe navele de transport mrfuri generale.
Parametrii de baz care caracterizeaz funcionarea mecanismelor auxiliare sunt:
debitul, presiunea i puterea.
Debitul Q este determinat de cantitatea de lichid, aer sau gaz dat pe unitatea de
timp i se msoar, de regul, n m
3
/h, m
3
/s sau l/min. Reglarea debitului, solicitat de
caracteristicile de funcionare ale unor instalaii, se poate face prin:
reducerea seciunii de refulare sau de absorbie prin nchiderea parial a unei
vane;
366
schimbarea vitezei motorului de acionare;
transvazarea invers a unei pri a lichidului de la refulare la admisie
(aplicat, de exemplu, la pompele cu roi dinate sau cu urub).
Dintre aceste procedee, cel mai economic ar fi prin modificarea turaiei motorului
electric, ns necesit complicarea schemei de comand a acestuia. De aceea la nave este
folosit pe scar larg metoda reglrii debitului prin folosirea unor vane de reducere care
este mai simpl dect celelalte.
Presiunea H este caracterizat de rezistena pe care trebuie s o nving lichidul
sau gazul care se deplaseaz. Se deosebesc dou valori ale presiunii: presiunea de refulare
msurat la ieire i presiunea de absorbie msurat la intrare. Presiunea reprezint n
sine cantitatea de energie transmis de mecanism lichidului sau gazului, care se
deplaseaz, pe unitatea de greutate i se msoar n N m N / (adic n metri) sau n
uniti de presiune Pa (pascali).
Puterea P cerut de mecanism este puterea dezvoltat de motorul electric de
acionare pentru funcionarea mecanismului cu debitul i presiunea dat.
8.2 Caracteristicile de baz ale mecanismelor auxiliare
Mecanismele auxiliare pot fi clasificate dup destinaie i dup principiul de
funcionare.
Dup destinaie se mpart n dou grupe principale: mecanisme auxiliare pentru
instalaiile de putere ale navei i mecanisme auxiliare pentru sistemele navale.
Din prima grup fac parte mecanismele auxiliare care asigur funcionarea
instalaiilor de putere ale navei, cum ar fi:
pompe de circulaie pentru rcirea apei n condensator;
pompe de rcire pentru motoarele principale i auxiliare, compresoare .a;
pompe pentru alimentarea cu ap a cldrilor;
pompe de combustibil;
pompe de ulei;
ventilatoare pentru meninerea temperaturii i umiditii aerului n
compartimentul maini;
ventilatoare care asigur funcionarea cldrilor;
ventilatoare pentru rcirea compartimentelor mecanismelor;
suflante care asigur aerul necesar pentru funcionarea motoarelor cu ardere
intern.
Din a doua grup fac parte mecanismele auxiliare care asigur funcionarea
sistemelor navale, cum ar fi:
pompele de incendiu care asigur apa necesar pentru sistemul de stins
incendiu;
pompe de drenaj pentru ndeprtarea apei din compartimentele navei n care
acumulrile acesteia au un caracter sistematic;
pompe de balast pentru transvazarea apei din tancurile de balast;
367
pompe de santin pentru ndeprtarea apei din forpic i ahterpic, santina
compartimentului maini, tunelul liniei axiale, cala magaziilor de mrfuri;
pompe de alimentare cu ap dulce din tancurile dispuse pe nav;
pompe pentru acionarea hidraulic a crmei;
ventilatoare pentru compartimentele de locuit;
ventilatoare exhaustoare pentru ndeprtarea gazelor nocive i cu pericol de
explozie din magaziile de mrfuri;
ventilatoare i compresoare pentru asigurarea necesitilor generale ale navei.
Dup principiul de funcionare pompele sunt: cu piston, centrifuge cu palete i
rotative cu roi dinate sau cu urub.
Mecanismele pentru deplasarea aerului sau gazelor dup valoarea presiunii realizate
se numesc ventilatoare, dac presiunea raportat la presiunea atmosferic este
5 , 1 0 , 1 p / p
at
, suflante, atunci cnd presiunea relativ este 4 06 , 1 p / p
at
i
compresoare pentru 100 3 p / p
at
i peste 100.
Pompele cu piston lucreaz pe principiul absorbiei lichidului i pot fi cu aciune
simpl sau dubl. n figura 8.1 este prezentat pompa cu aciune simpl.
La deplasarea n sus a pistonului 1 se creeaz o depresiune, se deschide valvula 3
i lichidul absorbit intr n cilindrul 2. La coborrea pistonului lichidul este presat, se
deschide valvula de refulare 5. n acest mod, la fiecare coborre a pistonului n conducta
de refulare 6 se transmite o cantitate de lichid determinat.
Debitul pompei se calculeaz cu formula:
[ ] s m
60
n l A
Q
3
v
unde: A - suprafaa pistonului, m
2
;
l - cursa pe care o face pistonul ntr-un sens;
n - numrul de cicluri pe minut (un ciclu
corespunde unei urcri i coborri a pistonului);
v
- coeficientul de volum al presiunii care ine
seama de scurgerile de lichid prin neetaneitile din
cilindru i care are valori n limitele de la 0,85 la 0,9.
Pompele cu piston se caracterizeaz prin:
construcie relativ simpl;
posibilitatea de a realiza presiuni mari;
valori mari ale randamentului
( 8 , 0 5 , 0
pomp
- valorile mari pentru
puteri mari);
posibilitate de autoamorsare i permanent pregtite pentru funcionare.
Cuplarea cu motorul electric necesit un mecanism intermediar de tip biel -
manivel pentru transformarea micrii de rotaie n micare de translaie.
Fig. 8.1 Pompa cu piston cu
aciune simpl
(8.1).
368
Pompele cu palete se mpart n pompe centrifuge i pompe cu elice. Dintre acestea,
pompele centrifuge sunt cele mai utilizate n instalaiile navale.
Pompa centrifug, reprezentat n
figura 8.2, se compune din rotorul cu palete 1,
dispus n corpul pompei sub form de melc 2.
Pompa, iniial, este umplut cu lichid.
Micarea rotorului cu palete n lichid imprim
acestuia o vitez de deplasare spre periferia
corpului i creeaz n centru o depresiune. n
locul lichidului refulat prin conducta 4 se
primete o nou cantitate de lichid prin
conducta de absorbie 3 cuplat cu zona
central a rotorului. Viteza lichidului, aruncat
spre periferia corpului, scade i ca urmare
crete presiunea lichidului n conducta de
refulare. Pentru obinerea unor presiuni nalte
(peste 2 5 10
6
, P
a
) se folosesc pompe cu mai
multe trepte care au cteva rotoare dispuse pe un singur ax antrenat de motorul electric de
acionare.
Pompele centrifuge se caracterizeaz prin:
simplitatea construciei;
numr minim de piese supuse uzurii;
admit funcionarea cu lichid care conine impuriti;
cuplarea direct cu motorul electric de acionare;
pentru funcionare pompa i conducta de aspiraie trebuie s fie umplute cu
lichid. Amorsarea pompei se menine ntre dou funcionri succesive prin
valvula de reinere montat la intrarea lichidului n conducta de admisie.
Debitul pompelor centrifuge este direct proporional cu turaia:
n C v A Q
1
unde: A - suprafaa seciunii transversale a rotorului cu palete la intrare;
n 2 v - viteza periferic la ieirea din canalele rotorului;
n - turaia n rot/s.
Presiunea realizat este proporional cu ptratul vitezei:
2
2
2
n C
g 2
v
H
n figura 8.3 se prezint caracteristicile normate generale (universale)
ale pompelor centrifuge care exprim variaia presiunii relative H/H
n
n funcie de debitul
relativ Q/Q
n
pentru diferite viteze.
Fig. 8.2 Pompa centrifug
(8.2)
(8.3)
369
Fig. 8.3 Caracteristicile universale ale pompelor centrifuge
Principiul de funcionare a pompelor cu elice este prezentat n figura 8.4.
Fig. 8.4 Principiul de funcionare al pompelor cu elice
Pompele cu elice sunt pompe care realizeaz presiuni mici, n limitele 10 15 m,
n schimb prezint avantajul realizrii unor debite mari n condiiile unor randamente
ridicate.
Pompele rotative sunt de dou tipuri: cu roi dinate i cu urub. Astfel de pompe
se folosesc de regul pentru lichide cu vscozitate mare: combustibil, ulei .a.
370
Fig. 8.5 Pompa cu roi dinate
Pompa cu roi dinate, reprezentat n figura 8.5, se compune din roata dinat de
comand 4 i roata dinat condus 2 montate ntr-un corp comun 1. Prin rotirea roilor,
lichidul care umple corpul pompei se deplaseaz de-a lungul corpului din camera de
absorbie 5 n camera de refulare 3. Deplasarea invers a lichidului este blocat de
interstiiul mic dintre suprafaa interioar a corpului i roile dinate aflate n micare de
rotaie. Se creaz o diferen de presiune ntre admisie i refulare sub aciunea creia se
deplaseaz lichidul.
Pompele cu roi dinate se caracterizeaz prin:
gabarit i mase mici;
uniformitatea curgerii lichidului;
posibilitatea de a realiza presiuni nalte ( ~ 10
7
P
a
);
cuplarea direct cu motorul electric de acionare;
posibilitate mic de absorbie;
execuie pretenioas, necesit ajustri precise ntre prile componente.
Ventilatoarele formeaz o grup foarte numeroas a mecanismelor auxiliare
navale cu acionare electric. n funcie de destinaie, se mpart n dou grupe:
a) ventilatoare care deservesc instalaiile electrice principale ale navei i sunt
destinate pentru meninerea temperaturii necesare i compoziiei aerului n
compartimentele maini precum i pentru a asigura funcionarea instalaiilor aferente
cldrilor;
b) ventilatoare care asigur nevoile generale ale navei i fac parte din sistemul
de climatizare care asigur schimbarea aerului din compartimentele de locuit,
ndeprtarea gazelor nocive sau cu pericol de explozie din magaziile de marf sau
ncperi cu grad ridicat de pericol.
371
n instalaiile navale ventilatorul de tip centrifugal, prezentat n figura 8.6, este
cel mai rspndit.
Corpul ventilatorului 1 este realizat sub form de melc i are dispus n interior,
rotorul cu palete 2. La ventilatoarele de puteri reduse, rotorul cu palete este dispus direct
pe axul motorului de acionare 3, aa cum se prezint n figura 8.6. Principiul de
funcionare a ventilatorului este acelai cu cel al pompelor centrifuge. Aerului aspirat n
centrul rotorului cu palete, sub aciunea forei centrifuge, i se imprim o vitez de
deplasare spre periferie, care se transform n presiune refulat pe sistemul de conducte.
Puterea necesar la arborele ventilatorului se determin cu formula:
[ ] kW
10
H Q
P
mec
3
n care:
Q - debitul ventilatorului, m
3
/s;
H - presiunea, P
a
;
mec
- randamentul mecanic al ventilatorului.
Pentru randament se pot admite urmtoarele valori
mec
= 6 , 0 4 , 0 la ventilatoare
cu puteri mici i mijlocii respectiv
mec
, 0 8 la ventilatoarele cu puteri mari.
Fig. 8.6 Ventilator centrifugal
Suflanta reprezint un tip particular al ventilatorului centrifugal. Particularitatea
const ntr-o construcie mecanic mai robust care permite dezvoltarea unor viteze
periferice superioare capabile s produc presiuni mai mari.
Suflantele navale deservesc motoarele cu ardere intern i cldrile navale.
Compresoarele navale asigur aerul comprimat folosit pentru pornirea motoarelor
cu ardere intern, principale i auxiliare. De asemenea, compresoarele se folosesc n
instalaiile frigorifice i de climatizare precum i pentru furnizarea aerului necesar altor
consumatori de la nav.
Dup principiul de funcionare, compresoarele sunt cu piston i
turbocompresoare (centrifugele). Dintre acestea, compresoarele cu piston sunt cele mai
ntrebuinate n instalaiile navale. Principiul de funcionare este asemntor cu cel al
(8.4)
372
pompelor cu piston. Reglarea debitului prin schimbarea turaiei se folosete rar. De
regul, compresorul lucreaz n tampon cu o butelie i pentru a menine presiunea n
butelie, ntre anumite limite, periodic se cupleaz funcionarea compresorului.
Puterea teoretic a compresorului, se calculeaz cu formula:
[ ] kW H Q 13 , 0 P
unde: Q - debitul compresorului, m
3
/s;
H, presiunea P
a
.
Pentru alegerea motorului electric de acionare este necesar s se ia n calcul i
valoarea randamentului mecanic al compresorului.
8.3 Alegerea motoarelor electrice de acionare.
Alegerea motoarelor electrice. Pentru pompele i ventilatoarele centrifugale se
folosesc, n curent continuu, motoarele electrice cu excitaie mixt, iar n curent
alternativ, motoarele asincrone cu rotorul n scurtcircuit.
Pompele i ventilatoarele centrifuge au puterea util proporional cu
cubul turaiei,
3
n P i de aceea au caracteristici uoare de pornire. Motorul
asincron cu rotorul n scurtcircuit, care are caracteristica mecanic rigid i
valoare redus a cuplului de pornire, corespunde pe deplin cerinelor impuse de
acionarea pompelor i ventilatoarelor. La motoarele de curent continuu prezena
unei uoare excitaii serie se folosete pentru meninerea turaiei necesare la
oscilaii ale tensiunii reelei.
Condiii grele de pornire sunt date de pompele i compresoarele cu piston.
La acestea cuplul de pornire poate depi de dou ori valoarea nominal. Aceste
condiii grele sunt datorate creterii frecrilor n perioada pornirii ntre pistoane,
segmeni, garnituri i existenei unui cuplu dinamic mare dat de ineria maselor
sistemului de acionare. De aceea, pentru pompe i compresoare cu piston se
folosesc motoarele asincrone cu alunecare mrit (bare nalte sau dubl colivie)
care permit obinerea unor cupluri de pornire mai mari.
n funcie de condiiile de lucru ale mecanismului auxiliar, motorul electric se
alege n execuie protejat la picturi, etan sau ermetic.
n anexa 3 se dau caracteristicile tehnice ale unor tipuri de electromotoare
folosite pentru acionarea electric a mecanismelor auxiliare.
Serviciul de funcionare al motoarelor electrice care acioneaz pompele
i ventilatoarele este, n mod obinuit, un serviciu continuu cu sarcin constant.
Calculul puterii motorului electric de acionare a pompelor i
ventilatoarelor. Puterea necesar pentru acionare este n funcie de debitul i
presiunea realizat i se determin cu relaia:
( )
[ ] kW
10
H H Q
P
pomp
3
st
+
unde: Q debitul pompei, m
3
/s;
- greutatea specific a lichidului, N/m
3
;
(8.5)
(8.6)
373
H
st
- presiunea static, m;
H - pierderile de presiune n conducte i rezistene locale, m;
pomp
- randamentul pompei (pentru pompe cu piston de la 0,5 la 0,8, pentru
pompe centrifuge de la 0,4 la 0,75).
Pierderile de presiune n conducte reprezint:
L T
H H H +
n care:
T
H - pierderile n tubulatur;
L
H - pierderi datorate rezistenelor locale, coturi, vane, clapei .a.
Pierderile n tubulaturi se determin cu formula:
[ ] m
g 2
v
d
l
H
2
T
n care:
- coeficient de frecare care poate fi considerat, cu aproximaie, = 0,025;
l i d - lungimea i diametrul conductei, m;
v - viteza lichidului, m/s;
g - acceleraia gravitaional, m/s
2
.
n cazul n care seciunea conductei este dreptunghiular, n calculul relaiei (8.8)
se introduce diametrul seciunii circulare echivalente, determinat cu relaia:
b a
ab 2
d
+
n care a i b sunt dimensiunile seciunii dreptunghiulare.
Pierderile locale se calculeaz pe baza stabilirii unor lungimi de tubulatur liniar
echivalent cu pierderile locale. n urma calculelor efectuate s-au stabilit lungimile
echivalente pierderilor locale prezentate n tabelul 8.1.
Tabel 8.1
Diametrul tubulaturii
[mm]
l
echiv
robinet
l
echiv
cot
l
echiv
clapet
l
echiv
valvul
l
echiv
valvul n unghi
50 1,0 0,3 0,5 10,0 5
76 1,5 0,5 0,8 17,0 8
100 2,0 0,8 1,2 25,0 12
150 3,0 1,4 1,9 45,0 20
254 5,1 2,8 4,1 95,0 40
303 6,0 3,6 5,2 115,0 50
(8.7)
(8.8)
(8.9)
374
Cunoscnd alctuirea reelei de conducte alimentat de pomp, se determin
lungimea echivalent pentru toate rezistenele locale i se calculeaz pierderile locale cu
formula:
g 2
v
d
l
H
2
echiv
L
Din relaiile (8.7), (8.8), i (8.10) rezult c valoarea pierderilor totale este:
( )
+
echiv
2
l l
g 2
v
d
H
iar presiunea total a pompei se calculeaz cu relaia:
( )
g 2
v
d
l l H H H H
2
echiv st st
+ + +
nlocuind n relaia (8.12) viteza n funcie de debit:
A
Q
v
se obine:
( )
2
2
echiv st
A g 2
Q
d
l l H H
+ +
Pentru calculul puterii motorului electric sunt necesare ca date iniiale: debitul Q,
nlimea H
st
pn la care trebuie urcat coloana de lichid i viteza care se alege
corespunztor cerinelor registrului de clasificare. Dispunnd de aceste date algoritmul de
calcul const n:
se calculeaz diametrul tubulaturii pentru debitul i viteza dat, se stabilete
traseul de conducte i se determin lungimea total a acestora;
se stabilesc elementele care dau pierderile locale i se calculeaz lungimea
echivalent a acestora;
se calculeaz pierderile n tubulaturi i locale cu relaia (8.12) sau (8.13) se
determin nlimea total H;
avnd cunoscute debitul Q i nlimea H, cu relaia (8.6) se calculeaz
puterea motorului electric.
La alegerea motorului electric din catalog, puterea de calcul, obinut cu relaia
(8.6), se majoreaz cu 10% pentru pompele cu piston i cu 16% pentru pompele
centrifuge. Aceast majorare este necesar ntruct turaia de catalog a motorului este dat
cu o precizie de t5% i n cazul n care viteza real este mai mare cu 5%, datorit
caracteristicilor pompei, puterea solicitat la axul motorului are o cretere important.
Verificarea motorului electric ales, la nclzire, nu este necesar avnd n vedere
c acesta lucreaz n regim de lung durat cu sarcin constant, apropiat de valoarea
(8.10)
(8.11)
(8.12)
(8.13)
375
nominal. n cazul folosirii pompelor cu mase mari de inerie este necesar s se fac
verificarea la nclzire numai pentru perioada de pornire.
nclzirea motorului n perioada de pornire se calculeaz cu relaia:
a
cu cu
t
c G
P
n care:
[ ] W R I P
2
p
- puterea pierdut la pornire n cuprul nfurrilor;
G
cu
- greutatea cuprului nfurrilor;
c
cu
= 390j/kgC - capacitatea termic a cuprului;
t
a
- durata regimului tranzitoriu de accelerare pe timpul pornirii.
Dup unele nlocuiri i transformri se obine relaia de calcul:
a
2
p
2
n
t
150
i j
unde: j
n
- densitatea de curent a crei valoare pentru nfurrile
mainilor electrice este n limitele 4 - 5A/mm
2
;
i
p
= I
p
/I
n
- valoarea relativ a curentului de pornire.
Motorul electric asigur regimul tranzitoriu de pornire dac valoarea temperaturii
nu depete 100C. n caz contrar, se va alege un motor cu putere mai mare, capabil s
scurteze perioada de accelerare, t
a
.
EXEMPLU DE CALCUL
Se cere s se aleag un motor pentru o pomp de racire care are debitul nominal
3
p
Q 50 m / h la o nlime de pompare nominal
n
H 35 m . Pompa este vertical cu o
singur treapt i este acionat direct de un motor cu turaia n 1500rot / min (25rot/s).
Caracteristicile pompei i tubulaturii sunt date in figura 1. Mrimea presiunii statice este
st
H m.Lungimea total a tubulaturii este l=1oom. Pe tubulatur se gasesc: intrarea, apte
supape de trecere, dou duze, un ventil de capt i douzeci i patru de coturi.
(8.14)
(8.15)
376
Fig. 8.7 Caracteristicile pompei si tubulaturii:
1-H=f(Q) la n=n
n
; 2-P
m
=f(Q); 3-H=f(Q); 4-H=f(Q) la n=0,5n
n
Determinarea caracteristicilor tubulaturii. Diametrul tubulaturii se alege
conform regulilor de registru, astfel nct viteza lichidului s nu fie mai mic de 2
m/s. La viteza de 2,5 m/s.
3
Q 50
S 0,0055 m
V 3600 2,5
;
2 2
45 45
d 0,007 m
3,14
;
Lungimea echivalent a tubulaturii l
ech
se determin n ipoteza c
pierderile la intrare sunt echivalente cu pierderile prin frecare ntr-o eav de 2 m;
pierderile n robinetele de trecere - 25 m; pierderile n duz - 1,5 m; pierderile n
coturi -0,8m;pierderile n ventilul de capt - 12 m.
Atunci l
ech
= 2 + 7 2,5 + 2 1,2 + 240,8 + 12210 m.Pe baza datelor
obinute se poate construi caracteristica tubulaturii ca urmatoarea expresie
(=0,025).
H= +0,0025
2 2
2 ech
2 2
l l Q 310 Q
5 0,025 5 0,012Q
d 0.083 5
2g 5 3600 2 9,8 0,005 5 3600
+
+ +
Dndu-se diverse valori pentru Q, se poate construi caracteristica
tubulaturii (vezi fig.1,curba 3). Caracteristica tubulaturii se intersecteaz cu
carcteristica pompei 1 n punctul A, corespunzator lui H
n
=35 m si Q
n
=50 m
3
/h.
Puterea motorului la
m
nom=0,72 este:
377
n n
m
mnom
Q H
P , kw
,
3 3
1
10 50 35 98 10
6 6
3600 3600 0 72
Reglarea debitului. innd seama de condiiile posibile de navigaie, este
necesar s se poat regla debitul pompei pn la valoarea de 20
3
m
h
. Se vor vor
compara, de asemenea, cele 2 metode de reglare a debitului: prin opturarea i prin
reglarea turaiei motorului.
n cazul reglrii debitului prin opturare puterea se determin dup curba 2
din fig. 1,pentru Q=20
3
m
h
(punctual A
1
): atunci P
m1
=5,05KW.
Pierderile la reglarea prin opturare sunt:
' 2
m1
1
H 9,8
P P 1 5,05 1 3,8 KW
H 40
_
_
,
,
,
Unde H
1
=40 m i H
2
=9,8m sunt nalimile de pompare la Q=20 m
3
/h, determinate
dup caracteristica pompei 1, i a tubulaturii 3.
Pentru determinarea puterii la axul motorului, n cazul reglrii debitului prin
reglarea turaiei (curba 4), se determin constanta
2
Q
K
H
pentru punctul A
2
cu
coordonatele
3
Q 20 m / h si H=9,8 m;
2
20
K 41
9,8
. Punctul A
2
se gsete pe
parabola
2
Q 41H artat punctat n fig.1 i construit dup urmtoarele
date :Q=10,20,30,40; H=2,44; 9,8; 21; 39. Din fig. 1 se vede c parabola
intersecteaz curba 1(caracteristica pompei pentru n=n
n
) n punctul A
3
, cruia i
corespunde Q=39 m
3
/h. Dup curba 2 se stabilete, c acestui debit ii corespunde
puterea
m
P , kw
2
6 1 (punctul A
4
). Puterea motorului la Q=20 m
3
/h este egal cu
( )
2
2 ' 1
m2 m2
2
Q
P P 6,1 20 / 39 1,6Kw
Q
_
,
Deci, puterea necesar la axul motorului, n cazul reglrii debitului prin variaia
turaiei, este mai mic dect cea obinut la reglarea debitului prin opturare .
Turaia motorului necesar pentru obinerea debitului impus este:
1
n
2
Q 20
n n 25 13rot / s
Q 39
n acest caz, se poate utiliza un motor asincron cu rotorul n scurtcircuit ,cu dou
trepte de turaie i astfel pierderile prin reglare vor fie egale cu 0.
Calculul puterii motoarelor electrice de acionare a compresoarelor
Compresoarele centrifugale, denumite i turbo-compresoare, sunt folosite
n general pentru realizarea unor debite mari de gaz la presiuni relativ mici.
Funcionarea lor este asemntoare cu cea a pompelor centrifugale i a
378
ventilatoarelor, ceea ce trebuie avut n vedere la rezolvarea problemelor de
acionare.
Pentru realizarea unor presiuni mai ridicate se folosesc compresoarele cu
piston cu compresiune n mai multe trepte. Acionarea electrica a acestor
compresoare, la care nu se pune problema modificrii vitezei, se face cel mai
frecvent prin maini sincrone. Mainile asincrone sunt folosite mai ales pentru
acionarea compresoarelor cu piston mici.
Puterea teoretic necesar pentru realizarea compresiunii izotermice
(pv=const) se calculeaz din expresia:
2
i 1 1
1
p 1
P p V ln Kw
1000 60 p
1
]
,
Iar pentru compresiunea politrop din expresia:
n 1
n
2
p 1 1
1
p 1 n
P p V 1 Kw
1000 60 n 1 p
1
1 _
1 1
]
1 ,
1
]
,
n care :
V
1
este debitul efectiv de gaz aspirat, raportat la starea acestuia la aspiraie, n
m
3
/min:
p
1
-presiunea n recipientul de aspiraie, n N/m
2
;
p
2
-presiunea n recipientul de refulare, n N/m
2
;
n exponentul politropic (n=1,41 la compresiunea adiabatic a aerului).
Puterea este minim la compresiunea izoterm care practic nu se poate
realiza.
Puterea indicat a compresorului este mai mic dect cea teoretic, datorit
unor particulariti constructive, rezultnd randamentul indicat
i
care are valoarea
0,620,75 pentru compresiunea izotermic i 0,900,94 pentru compresiunea
adiabatic.
Puterea la arborele mainii de acionare se obine mprind puterea
teoretic la randamnetul instalaiei =
i
m
tr
,unde
m
=0,800,95 este
randamentul mecanic al compresorului, iar
tr
=0,960,99 este randamentul
transmisiei pentru cuplarea direct ntre main si compresor.
Diagrama p-v a compresorului, n cazul compresiunii adiabatice, se
calculeaz din relaia
0
1,41 1,41
0
pv p v const. , unde p
0
i v
0
sunt presiunea i
volumul (cilindreea) corespunztoare poziiei iniiale (punct mort superior) a
pistonului, iar p si v sunt valorile curente ale presiunii i volumului pentru o
poziie oarecare a pistonului.
Diagrama indicat a compresorului se refer la variaia presiunii p n
funcie de cursa s a pistonului i se poate determina experimental sau se poate
calcula din diagrama p-v avnd n vedere c
v
s
A
,unde A este suprafaa activ a
pistonului, cursa s se msoar din punctul mort superior, inclusiv spaiul mort.
379
La compresoarele cu dubl aciune asupra pistonului acioneaz o presiune
rezultant, obinut prin nsumarea algebric a presiunilor exercitate de gaz pe
cele dou suprafee active ale pistonului.
n tija pistonului i la biel, n afar de fora datorat presiunii gazului, se
transmite i o for datorat frecrilor ntre piston i cilindru, ntre capul de cruce
i conducerea lui, precum i o for de inerie datorit maselor n micare
alternativ de translaie. Se obinuiete ca aceste fore s se exprime tot prin
presiuni raportate la suprafaa activ a pistonului.
Presiunea datorit frecarii se obine n urma unor calcule relativ
complicate.
Fora de inerie poate fi exprimat prin relaia:
j t
d r sin
F m r sin
dt l
r
sin
l
2
2
2
2
1 2
_
+
_
,
,
unde:
m
t
este masa pieselor n micare alternativ de translaie (piston, tija
pistonului ,capul de cruce,biela);
-viteza unghiular a manivelei;
r-raza manivelei;
l-lungimea bielei;
-unghiul manivelei msurat din punctul mort superior.
Considernd expresia de sub radical aproximativ egal cu 1, efectund
derivarea i mparind la suprafaa activ a pistonului ,rezult presiunea datorit
ineriei:
2
j t
r r
p m cos cos 2
A l
_
+
,
nsumnd presiunea rezultat a gazului cu presiunea de frecare i cu
presiunea de inerie se obine presiunea total; prin nmulirea acesteia cu
suprafaa activ a pistonului se obine fora F din tija pistonului.
Fora tangent la manivel F
t
i cuplul M
s
determinat de aceast for se
calculeaz cu expresiile:
t
r
F F sin sin
l
2
2
_
+
,
respectiv,
t
s
F F r r
M sin sin
l
_
+
,
2
2
380
Pentru
r 1
l s
< se poate neglija cel de-al doilea termen din parantez,
obinndu-se expresia cuplului static rezistent raportat la arborele motorului
electric sub forma:
s
r F
M sin
, unde:
-raportul de transmisie ntre arborele manivelei i motorul electric;
-randamentul transmisiei;
La compresorul cu dou sau mai multe trepte de compresiune, cuplul total
se obine prin nsumarea cuplurilor pentru fiecare treapt, innd seama de unghiul
la care sunt aezate manivelele una fa de alta.
Exemplu de calcul
Un compresor n 2 trepte (etaje) aspir aer la temperatura t
1
=20
0
C i presiunea
p
1
=1 ata comprimndu-l la p
2
=21 ata. tiind c debitul compresorului este de 500
m / h
3
, s se calculeze:
a) puterea necesar n cazul unei compresiuni politropice cu n=1,3, innd
seama de existena unui rcitor intermediar care reduce temperatura
aerului dup prima treapt la 200C (caz limit); randamentul instalaiei
=0,64;
b) economia procentual de putere fa de cazul folosirii unui compresor
ntr-o singur treapt (fr rcitor intermediar).
Rezolvare
a) innd seama c debitul este V
1
=500 m / h
3
corespunztor la T
'
1
=273
0
K i
p
'
1
=760 mm Hg, acesta se recalculeaz la temperatura T
1
=273+
1
=293
0
K i la
presiunea p
1
=1 ata=735 mm Hg=9,81 10
4
N/m
2
.
Considerand relaiile: p
1
v
1
=RT
1
; p
'
1
v
'
1
=RT
'
1
, se obine:
'
' 1 1
1 1
'
1 1
p T 760 293
V V 500 554
735 273
p T
m
3
/h
Presiunea p
'
2
la sfritul primei trepte de compresiune se stabilete n aa fel nct
lucrul mecanic s fie acelai pe ambele trepte de compresiune, adic
'
1 2
'
2
2
p p
p
p
Ca urmare:
'
2 1 2
p p p 1 21 4,57ata .
Lucrul mecanic de compresiune pe fiecare treapt este:
n 1
1,3 1
'
n
4 3 1,3 2
1 1 1
1
p n 1, 3
L p V 1 9, 81 10 554 4, 57 1 99081 10
n 1 p 1, 3 1
1
1
1 _
1
1
1
1
, 1
1 ]
]
Nm/h
Puterea corespunztoare pentru o treapt este:
381
1
1
L
P 43,1Kw
3600 10000
,
Iar pentru ambele trepte
P
t
=243,1=86,2 kW.
b) Lucrul mecanic necesar la compresiunea ntr-o singur treapt, fr rcitor
intermediar, este:
n 1
n
3 2
1 1 1
1
p n
L p V 1 240345 10
n 1 p
1
1 _
1
1 ,
1
]
Nm/h
La care corespunde puterea total
2
2
L
P 104 Kw
3600 10000
,
Economia de putere la compresiunea n dou trepte fa de compresiunea ntr-o
singur treapt estes
2 t
2
P P
100 17,1%
P
La compresiunea ntr-o singur treapt s-ar ceda n plus apei de rcire cantitatea
de cldur:
( )
2 t
P P
Q 3600 9780 Kcal / h
9,81 427
8.4 Scheme electrice de comand a acionrii pentru mecanismele auxiliare
Particularitile schemelor electrice de comand a acionrilor mecanismelor
auxiliare sunt determinate de regimul lor de lucru. Pompele, ventilatoarele i
compresoarele navale au frecven redus de conectare, nu necesit reversare, frnare i
funcioneaz, de obicei, fr reglarea turaiei. Aceste particulariti ale mecanismelor
auxiliare simplific schema electric de comand al crui rol se reduce numai la pornirea,
oprirea i protecia motorului electric.
Sisteme de comand n curent alternativ
n acionrile de curent alternativ pentru mecanismele auxiliare se ntrebuineaz,
n cele mai multe cazuri, motorul asincron cu rotorul n scurtcircuit.
Cuplarea direct, procedeul cel mai larg utilizat, se aplic n toate cazurile n care
puterea motorului electric nu depete 20% din puterea generatorului centralei electrice,
g m
P 2 , 0 P < . Atunci cnd puterea motorului electric este mai mare,
g m
P 2 , 0 P > , este
necesar s se asigure limitarea curentului de pornire prin diferite procedee. Dintre acestea,
la nave, cele mai utilizate sunt:
Conectarea unor rezistene sau reactane n circuitul statorului pentru limitarea
curenilor de pornire prin reducerea tensiunii aplicate motorului n perioada de pornire.
Reducerea tensiunii se realizeaz pe seama cderii de tensiune pe rezistenele sau
382
reactanele introduse n circuit, la pornire. Acest procedeu, relativ simplu i puin
costisitor, conduce, n acelai timp i la o reducere nsemnat a cuplului de pornire. n
cazul unor mecanisme auxiliare cu pornire n sarcin, reducerea cuplului de pornire
reprezint un dezavantaj important. Procedeul se aplic cu rezultate bune pentru
mecanismele auxiliare cu caracteristica mecanic tip ventilator care nu necesit cupluri
mari de pornire.
Dup pornire, rezistenele sau reactanele se deconecteaz i motorului i se aplic
tensiunea nominal.
Conectarea stea - triunghi a nfurrii statorului. Procedeul se poate aplica numai
la motoarele asincrone a cror nfurare statoric are conexiunea normal de lucru
triunghi. Metoda este simpl i se aplic pentru mecanisme auxiliare cu porniri rare
deoarece trecerea brusc de la stea la triunghi duce la creterea curentului de pornire de 5
- 6 ori i ca rezultat apar ocuri mecanice brute care pot avea o influen negativ asupra
acionrii pe parcursul unei exploatri ndelungate.
Conectarea unor rezistene n circuitul rotorului se folosete n cazul motoarelor
asincrone cu rotor bobinat. Astfel de motoare sunt ntlnite rar la nave i de obicei se
folosesc n cazul n care mecanismul executor solicit i reglarea vitezei.
Folosirea autotransformatorului pentru pornire este o soluie tehnic foarte bun
care permite reducerea curentului de pornire, meninnd n acelai timp o valoare ridicat
a cuplului de pornire, spre deosebire de celelalte procedee de reducere a tensiunii aplicate
la pornire. n general, treapta de reducere a tensiunii este 0 55 0 65 , , U
n
sau 0,8U
n
.
Dezavantajul acestui sistem comparativ cu celelalte const n creterea
dimensiunilor, masei i preului de cost.
Schemele electrice de comand a acionrii mecanismelor auxiliare pentru
instalaiile de for i sistemele navale, n funcie de importana acestora, trebuie s
asigure:
- siguran n funcionare i deservire simpl;
- pornire uoar;
- posibilitatea comenzii locale, de la distan i automatizarea pornirii n
funcie de regimul de lucru al instalaiilor din care fac parte mecanismele auxiliare;
- economie n funcionare la regimul nominal i la reglarea vitezei;
- reglarea comod a vitezei pentru mecanismele care necesit aceast reglare.
Deoarece grupul mecanismelor auxiliare este cel mai numeros pe nav, acesta
poate fi mprit pe subgrupe care folosesc aceeai schem de comand a acionrii
electrice. Pentru exemplificare se prezint, pe tipuri de pornitoare magnetice i destinaii,
schemele electrice de comand a mecanismelor auxiliare de la o nav de transport cu
deplasament 2000 tdw.
n figura 8.7 este prezentat schema de comand cel mai frecvent utilizat.
Numrul mecanismelor auxiliare pentru care se folosete aceast schem este mult mai
mare dect cel menionat n tabelul din schem pentru exemplificare. Pornirea motorului
electric se face prin butoane de la postul local, bh, montat n apropierea mecanismului
antrenat. Protecia motorului la suprasarcin este realizat cu relee termice, et, iar la
scurtcircuit cu sigurane fuzibile. Schema de comand se alimenteaz de la un
transformator cobortor de tensiune 380 24V prin ntreruptorul a
1
. Funcionarea
schemei este simpl i nu necesit alte explicaii. n schema de montaj prezentat n
383
figur se observ c elementele schemei: contactor, relee termice, sigurane,
transformator, ntreruptor de separare, a, sunt montate ntr-un sertar sau tablou numit
pornitor magnetic. Pornitorul magnetic este alimentat de la reea i de la el pleac un
cablu pentru motorul electric i altul pentru postul de comand local care conine lampa
de semnalizare a funcionrii motorului electric i butoanele pentru comanda pornirii i
opririi acestuia.
Pentru puteri diferite ale motoarelor electrice care folosesc acest tip de schem de
comand, aparatajul electric se alege corespunztor.
Schema electric de comand a pompelor submersibile este prezentat n figura
8.8. Conectarea motorului electric la sistemul de alimentare i comand se face prin prize
cu ntreruptor. ntreruptorul automat a
1
asigur protecia la suprasarcin i scurtcircuite.
Conectarea se face manual, iar deconectarea automat ca urmare a aciunii proteciei.
Pornirea i oprirea pompei este realizat de contactorul C, comandat prin butoane de la un
post local, bh. Elementele schemei de comand alctuiesc pornitorul magnetic de tip P2.
n figura 8.9 este prezentat schema de comand pentru compresoare i pompe
care alimenteaz hidrofoare. Alimentarea de la reea se face prin ntreruptorul automat a,
care asigur protecia la suprasarcin i scurtcircuit. Funcionarea acestor mecanisme
poate fi n regim manual sau automat. Alegerea regimului de funcionare se face prin
punerea comutatorului b
1
pe una din poziiile I - manual sau II - automat.
n regim manual, comanda pornirii i opririi se face cu butoanele de comand b
2
i b
3
.
Pentru regimul automat, comenzile de pornire i oprire se dau de ctre
traductoarele de presiune f. Traductorul de presiune minim are rolul butonului de
pornire. La atingerea valorii minime se nchide contactul de presiune minim i este
pornit motorul electric de acionare, de exemplu, al pompei de alimentare a hidroforului.
Cnd presiunea hidroforului ajunge la limita maxim, traductorul de presiune maxim,
care are un rol similar cu butonul de oprire, comand oprirea pompei de alimentare.
n hidrofoare sau n buteliile de aer, la funcionarea n regim automat, se menine
presiunea ntre o valoare minim i o valoare maxim. De regul, se las un domeniu mai
larg ntre valorile de minim i maxim pentru a nu avea porniri i opriri cu frecven mare
a pompelor sau compresoarelor.
Funcionarea pompelor sau compresoarelor este semnalizat de lampa de
semnalizare de la postul local de comand, bh. Pentru compresoarele de aer destinate
lansrii motoarelor principale se monteaz suplimentar a doua lamp de semnalizare n
PSCM (post de supraveghere i comand maini) avnd n vedere importana existenei
aerului de lansare pentru sigurana navei.
Aprinderea ntr-un anumit ritm a lmpii de semnalizare n PSCM indic
funcionarea normal a instalaiei de aer. Micorarea duratei ntre aprinderile succesive
indic faptul c pe instalaia de aer sunt scpri i trebuie s se intervin pentru depistarea i
eliminarea acestora. De asemenea, neaprinderea lmpii o durat mai mare de timp poate
indica o defeciune n funcionarea compresorului i, de asemenea, trebuie s se intervin.
384
Fig. 8.8 Schema electric de comand pentru pompe i ventilatoare de utilizri generale
385
Fig. 8.9 Schema electric de comand pentru pompe submersibile
386
Fig. 8.10 Schema electric de comand pentru compresoare de aer i pompe care alimenteaz
hidrofoare
387
Fig. 8.11 Scheme electrice de comand pentru vinciuri electromanuale:
a. vinci grui brci de salvare; b. vinci pentru transfer containere
388
Fig. 8.12 Scheme electrice de comand pentru agregate care fac parte din instalaii cu funcionare
automat: a. filtroventilaie; b. caldarin
389
Fig. 8.13 Schema electric a tabloului secundar de distribuie for
390
Schemele electrice de comand pentru vinciurile electromanuale sunt prezentate n
figura 8.10. Aceste mecanisme, dei nu fac parte din categoria mecanismelor auxiliare, sunt
prezentate mpreun cu acestea ntruct folosesc pentru comand pornitoare magnetice de
tipuri similare. Funcionarea vinciului pentru gruiul brcii de salvare se comand manual
prin butonul b
1
. Micarea dureaz ct timp se ine apsat butonul. Acionarea electric este
folosit numai la ridicarea brcii, coborrea fiind efectuat sub aciunea greutii proprii.
Cuplarea cu mecanismul de acionare se face printr-un ambreiaj cu friciune care permite
prin apsarea manual a unei prghii s se schimbe raportul de transmisie i s se obin pe
aceast cale modificarea vitezei la ridicarea i la coborrea brcii. Acelai tip de vinci
electromanual este folosit i pentru ridicarea scrii de bord. Pentru limitarea micrii i
interzicerea funcionrii acionrii electrice, atunci cnd se intenioneaz s se execute
manual ridicarea brcii, n schem sunt prevzute limitatoarele de curs b
2
, b
3
, b
4
.
Schema de comand a vinciului pentru transfer containere, spre deosebire de
cazul precedent, permite funcionarea motorului electric n ambele sensuri. n acest scop
sunt folosite contactoarele C1, C2 i butoanele b
1
, b
2
, iar b
3
este contactul limitatorului de
curs.
n figura 8.11 sunt prezentate schemele electrice de comand pentru agregate care
fac parte din instalaii cu funcionare automat. n cazul filtroventilaiei, comutatorul b
1
permite alegerea regimurilor: I - manual, 0 - stop, II - automat. La comanda automat, prin
contactul b
4
se asigur pornirea i oprirea ventilatoarelor. Acest contact aparine instalaiei
ce funcioneaz automat i conectarea sau deconectarea lui se face n funcie de parametrii
reglai.
n al doilea caz, funcionarea motorului electric de antrenare a pompei de
alimentare a caldarinei este comandat de instalaia de automatizare a caldarinei. Intervenia
manual nu este posibil dect tot prin sistemul de comand automat. De asemenea, o serie
de contacte auxiliare ale contactorului C sunt folosite n instalaia de automatizare a
caldarinei pentru semnalizri sau condiionri n funcionarea altor elemente din
compunerea schemei.
La nave, pentru a simplifica schema de distribuie a energiei electrice necesar
alimentrii grupului mare de mecanisme auxiliare, acestea se grupeaz pe zone i
pornitoarele magnetice pentru mecanismele auxiliare dintr-o zon sunt montate ntr-un
tablou de for. n figura 8.12 este prezentat schema monofilar a unui tablou secundar
de for. Acest tablou este alimentat din tabloul principal de distribuie i conine
pornitoarele magnetice pentru mecanismele auxiliare din zona n care este instalat. n
acest fel, se obine scurtarea reelelor de cabluri i micorarea numrului consumatorilor
racordai la tabloul principal de distribuie. De asemenea, la constituirea tablourilor
secundare de for se are n vedere, pe ct este posibil, ca acestea s conin consumatori
de acelai fel: pompe, ventilatoare sau compresoare.
391
n schemele electrice, prezentate in figurile 8.7 .8.12, pornirea motorului
asincron n scurtcircuit se realizeaza prin cuplarea direct la reeaua navei. Sistemul de
pornire prin cuplare direct este cel mai simplu i, ca urmare, este cel mai utilizat pentru
mecanismele auxiliare la care puterea motorului electric de acionare este mic
comparativ cu puterea generatorului din centrala electric a navei.
n cazul navelor la care pentru unele mecanisme auxiliare puterea motorului
electric de acionare depete 20% din puterea generatorului (pompa de incendiu,
compresoare, s.a). Se folosesc scheme electrice care permit reducerea curentului de
pornire. Procedeele folosite sunt: conectarea unor rezistente sau reactante n circuitul
statorului, conectarea stea-triunghi, folosirea autotransformatoarelor pentru pornire.
Dintre acestea, la nave procedeele ntlnite frecvent sunt primele dou. Folosirea
autotransformatorului, soluie tehnic foarte bun, este mai rar utilizat ntruct conduce
la creterea dimensiunilor, masei i preului de cost.
Schema de pornire prin conectarea stea-triunghi a nfurrilor statorului este
prezentata n fig.8.13.
Elementele componente ale schemei din fig. 8.13 sunt:
- m-motor asincron cu rotorul n scurtcircuit
- C1-contactor de linie
- C2-contactor pentru conectarea nfurrii statorului n stea
- C3-contactorul pentru conectarea nfurrii n triunghi
- d1,d2-relee de timp cu temporizare la revenire
- et1,et2-relee termice de protecie maximal
- b1,b2-butoane pentru comanda local
- b3,b4-butoane pentru comanda de la distan
La aplicarea tensiunii de alimentare sunt conectate releele d1, d2, se nchid
contactele d1 (2-4), d2 (2-4) i schema este pregatit pentru funcionare. Motorul electric
este n repaus.
Pentru pornire se apas pe butonul b1(b3 n cazul pornirii de la distan). Este
alimentat bobina contactorului C2 i prin contactul C2 (2-4) este alimentat i contactorul
C1. Se nchid contactele principale ale contactoarelor C1 C2 i motorul porneste cu
nfurrile conectate n stea. n acelai timp se deschid contactele C1 (3-5), C1 (7-9) i se
ntrerupe n primul moment alimentarea releului d1.
Dup expirarea timpului de ntrziere al releului d1 se deschide contactul d1 (2-4)
i se ntrerupe alimentarea releului d2 cu ntrziere, se deschide contactul d2 (2-4) din
circuitul contactorului C2. Se ntrerupe alimentarea contactorului C2 i prin nchiderea
contactului C2 ( 3-5) este alimentat contactorul C3. Ca urmare se ntrerupe conexiunea
stea i se realizeaz conectarea nfurrilor statorului n triunghi. Aprinderea lmpilor de
392
semnalizare h1,h2 semnalizeaz, local i la distan, terminarea procesului tranzitoriu de
pornire.
Pentru oprire se apas pe butonul b2 (b4 n cazul opririi de la distan) se
ntrerupe alimentarea schemei de comand i motorul electric se oprete. La ncetarea
apsrii pe butonul de oprire schema de comand revine la situaia iniial fiind pregatit
pentru o nou pornire.
Releele termice et1, et2 asigur protecia maximal de curent. La apariia
suprasarcinii cu ntrziere, se deschid contactele releelor i se ntrerupe funcionarea
motorului.
393
Fig. 8.14 Schema de pornire automat cu reducerea curentului de pornire prin conectarea stea-
triunghi
3
9
4
M
o
t
o
a
r
e
a
s
i
n
c
r
o
n
e
t
r
i
f
a
z
a
t
e
c
u
r
o
t
o
r
u
l
n
s
c
u
r
t
c
i
r
c
u
i
t
c
u
d
u
b
l
i
t
r
i
p
l
c
o
m
u
t
a
i
e
d
e
p
o
l
i
,
c
u
f
r
e
l
e
c
t
r
o
m
a
g
n
e
t
i
c
,
d
e
s
t
i
n
a
t
e
a
c
i
o
n
r
i
i
i
n
s
t
a
l
a
i
i
l
o
r
d
e
a
n
c
o
r
a
r
e
i
l
e
g
a
r
e
,
d
e
f
a
b
r
i
c
a
i
e
r
o
m
n
e
a
s
c
A
N
E
X
A
1
.
1
t
i
p
u
l
d
e
m
o
t
o
r
n
u
m
r
u
l
d
e
p
o
l
i
p
u
t
e
r
e
a
n
o
m
i
n
a
l
[
k
W
]
t
u
r
a
i
a
s
i
n
c
r
o
n
[
r
o
t
/
m
i
n
]
s
e
r
v
i
c
i
u
l
n
o
m
i
n
a
l
%
c
o
s
M M
p n
M
M
n
m
i
n
M
M
n
m
a
x
I I
p n
t
u
r
a
i
a
[
r
o
t
/
m
i
n
]
J
m
a
x
.
[
k
g
m
2
]
F
r
n
a
M
f
m
a
x
.
[
N
.
m
]
p
u
t
e
r
e
a
a
b
s
o
r
b
i
t
[
W
]
m
a
s
a
[
k
g
]
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
A
S
F
N
-
8
0
,
8
7
5
0
S
2
-
3
0
m
i
n
6
0
0
,
5
3
1
,
5
-
3
1
,
5
2
-
3
6
6
0
0
0
,
1
5
7
2
5
3
0
3
5
1
1
2
-
8
/
4
4
1
,
8
1
5
0
0
S
2
-
3
0
m
i
n
6
4
0
,
6
6
1
,
4
-
3
1
,
5
2
-
3
6
1
2
0
0
A
S
F
N
-
8
1
,
2
5
7
5
0
S
2
-
3
0
m
i
n
7
0
0
,
6
6
1
,
5
-
3
1
,
5
2
-
3
6
6
1
5
0
,
2
4
0
3
0
1
2
5
1
3
2
S
-
8
/
4
4
2
,
5
1
5
0
0
S
2
-
3
0
m
i
n
7
2
0
,
6
0
1
,
5
-
3
1
,
5
2
-
3
6
1
2
3
0
A
S
F
N
-
8
2
7
5
0
S
2
-
3
0
m
i
n
7
0
0
,
6
0
1
,
5
-
3
1
,
5
2
-
3
6
6
3
0
0
,
2
5
6
0
5
0
1
5
0
1
3
2
M
-
8
/
4
4
4
1
5
0
0
S
2
-
3
0
m
i
n
7
2
0
,
6
6
1
,
5
-
3
1
,
5
2
-
3
6
1
2
6
0
A
S
F
N
-
8
3
,
2
7
5
0
S
2
-
3
0
m
i
n
7
0
0
,
6
3
1
,
5
-
3
1
,
5
2
-
3
6
6
0
0
0
,
3
0
1
0
0
6
6
1
6
0
L
-
8
/
4
4
6
,
3
1
5
0
0
S
2
-
3
0
m
i
n
6
0
0
,
7
0
1
,
5
-
3
1
,
5
2
-
3
6
1
2
0
0
A
S
F
N
-
1
6
4
3
7
5
S
2
-
5
m
i
n
4
5
0
,
3
0
1
,
5
-
3
1
,
5
2
-
3
4
2
8
5
2
0
0
L
-
8
8
7
5
0
S
2
-
3
0
m
i
n
7
4
0
,
6
4
1
,
5
-
3
1
,
5
2
-
3
6
6
6
0
0
,
8
2
0
0
1
0
0
4
0
0
1
6
/
8
/
4
4
8
1
5
0
0
S
2
-
1
0
m
i
n
7
6
0
,
8
2
1
,
5
-
3
1
,
2
1
,
6
6
1
3
3
5
A
S
F
N
-
1
6
6
,
3
3
7
5
S
2
-
5
m
i
n
4
8
0
,
3
2
1
,
5
-
3
1
,
5
2
-
3
4
3
0
0
2
2
5
M
-
8
1
2
,
5
7
5
0
S
2
-
3
0
m
i
n
7
6
0
,
6
6
1
,
5
-
3
1
,
5
2
-
3
6
6
7
0
1
,
2
5
4
0
0
1
7
0
4
8
0
1
6
/
8
/
4
4
1
2
,
5
1
5
0
0
S
2
-
1
0
m
i
n
7
8
0
,
8
4
1
,
4
-
2
1
,
2
1
,
6
6
1
3
5
0
A
S
F
N
-
1
6
8
3
7
5
S
2
-
5
m
i
n
4
8
0
,
3
2
1
,
5
-
3
1
,
5
2
-
3
4
3
0
0
2
2
5
M
-
8
1
6
7
5
0
S
2
-
3
0
m
i
n
7
6
0
,
6
6
1
,
5
-
3
1
,
5
2
-
3
6
6
7
0
1
,
5
7
5
4
0
0
1
7
0
5
5
0
1
6
/
8
/
4
4
1
6
1
5
0
0
S
2
-
1
0
m
i
n
7
8
0
,
8
4
1
,
4
-
2
1
,
2
1
,
6
6
1
3
5
0
A
S
F
N
-
1
6
1
2
,
5
3
7
5
S
2
-
5
m
i
n
5
0
0
,
3
4
1
,
5
-
3
,
5
1
,
5
2
-
3
,
5
4
3
1
2
2
5
0
M
-
8
2
5
7
5
0
S
2
-
3
0
m
i
n
7
8
0
,
6
5
1
,
5
-
3
,
5
1
,
5
2
-
3
,
5
6
6
8
0
2
,
5
8
0
0
2
1
5
8
0
0
1
6
/
8
/
4
4
2
5
1
5
0
0
S
2
-
3
0
m
i
n
8
0
0
,
8
0
1
,
5
-
3
,
5
1
,
5
1
,
6
6
1
3
6
5
3
9
5
A
S
F
N
-
1
6
1
6
3
7
5
S
2
-
5
m
i
n
5
3
0
,
3
6
1
,
5
-
3
1
,
5
2
-
3
4
3
2
5
2
8
0
M
-
8
3
2
7
5
0
S
2
-
3
0
m
i
n
8
0
0
,
7
0
1
,
5
-
3
1
,
5
2
-
3
6
6
9
0
4
8
0
0
2
1
5
8
0
0
1
6
/
8
/
4
4
3
2
1
5
0
0
S
2
-
1
0
m
i
n
8
2
0
,
8
8
1
,
4
-
2
1
,
2
1
,
6
6
1
3
8
0
A
S
F
N
-
1
6
2
0
3
7
5
S
2
-
5
m
i
n
5
3
0
,
3
6
1
,
5
-
3
1
,
5
2
-
3
4
3
2
5
2
8
0
M
-
8
4
0
7
5
0
S
2
-
3
0
m
i
n
8
0
0
,
7
0
1
,
5
-
3
1
,
5
2
-
3
6
6
9
0
8
0
0
2
1
5
9
0
0
1
6
/
8
/
4
4
4
0
1
5
0
0
S
2
-
1
0
m
i
n
8
2
0
,
8
8
1
,
4
-
2
1
,
2
1
,
6
6
1
3
8
0
C
a
r
a
c
t
e
r
i
s
t
i
c
i
l
e
t
e
h
n
i
c
e
a
l
e
m
o
t
o
a
r
e
l
o
r
a
s
i
n
c
r
o
n
e
c
u
d
o
u
i
c
u
t
r
e
i
v
i
t
e
z
e
d
i
n
s
e
r
i
a
M
A
f
o
l
o
s
i
t
e
p
e
n
t
r
u
a
c
i
o
n
a
r
e
a
m
e
c
a
n
i
s
m
e
l
o
r
d
e
a
n
c
o
r
a
r
e
i
l
e
g
a
r
e
A
N
E
X
A
1
.
2
.
T
i
p
u
l
e
l
e
c
t
r
o
-
m
o
t
o
r
u
l
u
i
N
u
m
r
u
l
d
e
p
o
l
i
P
u
t
e
r
e
a
[
k
W
]
R
e
g
i
m
d
e
l
u
c
r
u
[
m
i
n
u
t
e
]
T
u
r
a
i
a
[
r
o
t
/
m
i
n
]
C
u
r
e
n
t
u
l
d
e
l
i
n
i
e
[
A
]
c
o
s
M
o
m
e
n
t
u
l
m
a
x
i
m
[
k
g
f
m
]
M
o
m
e
n
t
u
l
d
e
p
o
r
n
i
r
e
[
k
g
f
m
]
C
u
r
e
n
t
u
l
d
e
p
o
r
n
i
r
e
[
A
]
T
i
m
p
u
l
a
d
m
i
s
d
e
s
t
a
.
s
u
b
c
u
r
e
n
t
[
s
]
M
o
m
e
n
t
u
l
d
e
i
n
e
r
i
e
[
k
g
. m
2
]
2
2
0
V
3
8
0
V
2
2
0
V
3
8
0
V
f
f
r
c
u
f
r
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
M
A
4
2
,
2
3
0
1
3
6
5
9
,
7
5
,
6
0
,
8
0
3
,
9
3
,
5
4
1
,
5
2
4
,
0
2
0
0
,
1
2
0
,
1
6
1
2
2
-
4
/
8
8
1
,
5
1
5
5
9
5
9
,
2
5
,
3
0
,
7
5
4
,
3
4
,
3
2
1
,
6
1
2
,
5
3
0
M
A
4
3
,
6
3
0
1
3
9
0
1
5
,
6
9
,
0
0
,
8
4
6
,
4
5
,
8
7
3
,
0
4
2
,
0
3
0
0
,
1
9
0
,
2
4
2
2
1
-
4
/
8
8
2
,
5
3
0
6
4
0
1
8
,
1
1
0
,
5
0
,
6
2
9
,
3
8
,
9
4
5
,
0
2
6
,
0
4
5
M
A
4
7
,
0
3
0
1
4
0
0
2
6
,
8
1
5
,
5
0
,
8
4
1
4
,
5
1
3
,
0
1
6
5
,
0
9
5
,
0
3
0
0
,
5
0
0
,
7
0
4
2
1
-
4
/
8
8
5
,
6
3
0
6
5
0
3
1
,
0
1
7
,
9
0
,
7
2
2
0
,
0
2
0
,
0
9
7
,
0
5
6
,
0
4
0
M
A
4
1
2
3
0
1
3
9
0
4
2
,
5
2
4
,
5
0
,
9
0
2
2
,
0
2
0
,
0
2
1
5
,
0
1
4
2
,
0
3
0
0
,
8
0
1
,
0
4
2
2
-
4
/
8
8
8
3
0
6
4
5
3
7
,
5
2
1
,
6
0
,
7
8
3
0
,
0
2
9
,
0
1
3
0
,
0
7
5
,
0
4
5
3
9
6
M
A
4
2
0
3
0
1
2
7
5
7
1
,
0
4
1
,
0
0
,
9
4
2
5
,
0
2
3
,
0
2
2
5
,
0
1
3
0
,
0
6
0
2
,
3
2
,
9
5
2
1
-
4
/
1
6
1
6
5
1
5
3
1
0
4
7
,
0
2
7
,
0
0
,
5
5
3
9
,
0
3
9
,
0
9
9
,
0
5
7
,
0
6
0
M
A
4
2
8
3
0
1
3
6
0
9
3
,
0
5
4
,
0
0
,
9
4
5
0
,
0
4
3
,
0
4
6
5
,
0
2
7
0
,
0
1
5
2
,
3
2
,
9
5
2
1
-
4
/
1
6
1
6
5
1
5
3
1
0
4
7
,
0
2
7
,
0
0
,
5
5
3
9
,
0
3
9
,
0
9
9
,
0
5
7
,
0
6
0
M
A
8
1
5
3
0
6
7
5
7
1
,
0
4
1
,
0
0
,
7
2
5
8
,
0
5
2
,
0
2
6
0
,
0
1
5
0
,
0
5
0
2
,
3
2
,
9
5
2
1
-
8
/
1
6
1
6
5
1
5
3
1
0
4
7
2
7
,
0
0
,
5
5
3
9
,
0
3
9
,
0
9
9
,
0
5
7
,
0
6
0
M
A
8
2
2
,
0
3
0
6
9
0
9
8
,
0
5
6
,
5
0
,
7
5
8
0
,
0
7
6
,
0
4
6
0
,
0
2
6
5
,
0
5
0
4
,
4
5
5
,
4
5
6
2
1
-
8
/
1
6
1
6
1
0
,
0
1
5
2
9
5
6
7
,
5
3
9
,
0
0
,
6
5
6
4
,
0
6
4
,
0
1
4
7
,
0
8
5
,
0
3
0
M
A
8
3
0
,
0
3
0
6
9
0
1
3
9
,
0
7
7
,
0
0
,
7
3
1
1
2
,
0
1
0
0
,
0
6
2
5
,
0
3
6
0
,
0
5
0
5
,
5
6
,
5
6
2
2
-
8
/
1
6
1
6
1
2
,
0
1
5
2
9
5
7
6
4
4
,
0
0
,
6
5
7
5
,
0
7
5
,
0
1
7
3
,
0
1
0
0
,
0
3
0
M
A
4
1
5
3
0
1
4
1
0
5
2
,
7
3
0
,
5
0
,
9
0
3
4
,
0
3
0
,
0
3
4
6
,
0
2
0
0
,
0
2
0
5
2
1
-
8
1
5
3
0
6
5
0
6
9
,
2
4
0
,
0
0
,
7
9
5
0
,
0
5
0
,
0
2
3
0
,
0
1
3
3
,
0
5
0
2
,
3
2
,
9
-
4
/
8
/
1
6
1
6
4
,
2
1
0
3
1
0
3
6
,
3
2
1
,
0
0
,
6
3
2
7
,
0
2
7
,
0
7
3
,
0
4
2
,
5
3
0
M
A
4
2
2
3
0
1
4
4
0
7
5
,
0
4
3
,
0
0
,
9
0
6
0
4
5
,
0
6
7
5
,
0
3
9
0
,
0
1
5
6
2
1
-
8
2
2
3
0
6
8
5
1
0
0
,
0
5
8
,
0
0
,
7
3
8
0
7
5
,
0
4
1
5
,
0
2
4
0
,
0
5
0
4
,
4
5
5
,
4
5
-
4
/
8
/
1
6
1
6
7
1
0
3
4
0
6
9
,
0
4
0
,
0
0
,
5
2
5
5
5
5
,
0
1
5
6
,
0
9
0
,
0
3
0
M
A
4
2
8
3
0
1
4
4
5
1
0
0
,
0
5
8
,
0
0
,
8
6
9
0
,
0
8
0
,
0
9
7
0
,
0
5
6
0
,
0
1
5
6
2
2
-
8
3
0
3
0
6
9
0
1
4
5
,
0
8
4
,
0
0
,
6
8
1
2
5
,
0
1
1
5
,
0
6
2
2
,
0
3
6
0
,
0
4
5
5
,
5
6
,
5
-
4
/
8
/
1
6
1
6
1
0
1
0
3
1
5
8
1
,
5
4
7
,
0
0
,
5
9
7
0
,
0
7
0
,
0
1
9
0
,
0
1
1
0
,
0
3
0
M
A
4
6
0
3
0
1
4
2
0
-
1
1
3
,
0
0
,
9
3
1
3
0
,
0
1
0
5
,
0
-
7
3
0
,
0
1
5
7
2
2
-
8
6
5
3
0
7
0
0
-
1
3
4
,
0
0
,
7
8
2
0
0
,
0
1
7
0
,
0
-
6
5
0
,
0
4
0
1
4
,
5
1
5
,
5
-
4
/
8
/
1
6
1
6
1
8
1
0
3
0
0
-
6
8
,
0
0
,
7
4
9
8
,
0
9
0
,
0
-
1
5
0
,
0
3
0
3
9
7
A
N
E
X
A
1
.
3
M
o
t
o
a
r
e
a
s
i
n
c
r
o
n
e
n
a
v
a
l
e
c
u
r
o
t
o
r
n
s
c
u
r
t
c
i
r
c
u
i
t
p
r
o
d
u
s
e
d
e
f
i
r
m
a
R
a
d
e
K
o
n
c
a
r
-
I
u
g
o
s
l
a
v
i
a
T
i
p
u
l
m
o
t
o
r
u
l
u
i
1
6
P
O
L
I
8
P
O
L
I
4
P
O
L
I
F
R
V
I
N
C
I
A
N
C
O
R
A
C
A
B
E
S
T
A
N
C
O
N
E
X
I
U
N
E
-
2
m
i
n
C
O
N
E
X
I
U
N
E
-
5
m
i
n
C
O
N
E
X
I
U
N
E
Y
Y
-
3
0
m
i
n
C
O
N
E
X
I
U
N
E
-
1
0
m
i
n
M
P
[
N
m
]
n
N
1 ] 1
m
i
n
r
o
t
P
N
[
K
W
]
I
P
[
A
]
M
P
[
N
m
]
n
N
1 ] 1
m
i
n
r
o
t
P
N
[
K
W
]
I
P
[
A
]
P
N
[
K
W
]
n
N
1 ] 1
m
i
n
r
o
t
I
N
[
A
]
I
P
[
A
]
M
N
[
N
m
]
M
P
[
N
m
]
c
o
s
P
N
[
K
W
]
I
P
[
A
]
n
N
1 ] 1
m
i
n
r
o
t
T
i
p
M
f
[
N
m
]
3
8
0
;
5
0
H
z
A
B
Z
d
-
3
1
7
-
1
6
/
8
/
4
2
0
0
3
2
0
3
,
2
5
2
2
7
0
3
4
5
3
,
5
5
6
8
7
2
0
2
5
8
8
1
0
8
3
0
0
0
.
5
9
8
7
2
1
4
6
0
2
E
K
E
2
5
-
S
2
5
0
A
B
Z
d
-
3
6
3
-
1
6
/
8
/
4
3
0
0
3
2
0
5
7
0
4
0
0
3
4
5
5
,
3
7
4
1
2
7
2
0
3
5
1
1
0
1
6
2
4
0
0
0
,
6
5
1
2
8
8
1
4
6
0
2
E
K
E
6
3
-
2
S
6
3
0
A
B
Z
d
-
3
6
5
-
1
6
/
8
/
4
4
5
0
3
2
0
7
1
0
5
6
0
0
3
4
5
7
,
5
1
0
8
1
7
7
2
0
4
9
1
8
0
2
3
0
6
1
0
0
,
6
4
1
7
1
3
5
1
4
6
0
2
E
K
E
6
3
-
2
S
6
3
0
A
B
Z
d
-
3
6
7
-
1
6
/
8
/
4
5
3
0
3
2
0
9
,
5
1
3
0
7
0
0
3
4
5
1
0
,
5
1
3
0
2
4
7
2
0
6
6
2
0
0
3
2
5
8
0
0
0
,
6
5
2
4
1
8
0
1
4
6
0
2
E
K
E
6
3
-
2
S
6
3
0
A
B
Z
d
-
4
0
5
-
1
6
/
8
/
4
8
0
0
3
2
0
1
2
,
5
1
9
2
1
0
8
0
3
4
5
1
4
1
9
2
3
2
7
2
5
8
4
3
0
8
4
3
0
1
0
8
0
0
,
6
9
3
2
2
3
2
1
4
6
5
2
E
K
E
6
3
-
2
S
6
3
0
A
B
Z
d
-
4
0
7
-
1
6
/
8
/
4
9
4
0
3
2
5
1
6
,
5
2
1
9
1
2
6
0
3
5
0
1
8
2
2
2
4
2
7
2
5
1
0
7
3
6
5
5
6
5
1
3
0
0
0
,
7
4
2
3
3
0
1
4
6
5
2
E
K
E
6
3
-
2
S
6
3
0
A
B
Z
d
-
4
5
5
-
1
6
/
8
/
4
1
5
0
0
3
2
5
2
2
,
5
3
3
0
2
0
0
0
3
5
0
2
5
2
5
0
5
5
7
2
5
1
5
0
5
8
6
7
4
0
1
9
0
0
0
,
6
5
5
5
4
0
0
1
4
6
5
2
E
K
E
6
3
-
2
S
6
3
0
A
B
Z
d
-
5
2
5
-
1
6
/
8
/
4
1
8
0
0
3
2
5
2
7
4
0
0
2
4
0
0
3
5
0
3
0
4
0
0
7
0
7
2
5
2
0
8
7
0
0
9
4
0
2
4
2
0
0
,
6
7
0
6
2
5
1
4
7
0
2
E
K
E
1
0
0
-
2
S
1
0
0
0
A
B
Z
d
-
5
2
7
-
1
6
/
8
/
4
2
2
5
0
3
2
5
3
4
5
2
2
3
0
0
0
3
5
0
3
8
5
3
5
8
5
7
2
5
2
4
0
9
2
0
1
1
4
0
2
9
0
0
0
,
6
2
8
5
7
5
0
1
4
7
0
2
E
K
E
1
0
0
-
2
S
1
0
0
0
3
9
8
A
N
E
X
A
2
.
1
M
o
t
o
a
r
e
a
s
i
n
c
r
o
n
e
n
a
v
a
l
e
n
s
c
u
r
t
c
i
r
c
u
i
t
f
a
b
r
i
c
a
t
e
n
R
u
s
i
a
T
i
p
u
l
m
o
t
o
r
u
l
u
i
N
r
.
d
e
p
o
l
i
S
e
r
v
i
c
i
u
l
d
e
f
u
n
c
i
o
n
a
r
e
P
N
[
K
W
]
n
N
[
r
o
t
/
m
i
n
]
U
N
[
V
]
I
N
[
A
]
I
P
[
A
]
N
[
%
]
c
o
s
M
m
a
x
[
N
m
]
M
P
[
N
m
]
G
D
2
[
N
m
2
]
F
r
n
a
S
c
h
e
m
a
d
e
c
o
n
e
x
i
u
n
i
T
i
p
M
F
[
N
m
]
M
A
6
2
1
-
4
/
8
/
2
4
M
A
6
1
1
-
4
/
8
/
2
4
4
S
3
4
0
%
3
0
1
4
0
0
3
8
0
5
9
3
0
0
8
3
0
,
9
5
5
0
0
4
0
0
7
0
T
M
T
6
2
T
M
T
6
4
5
0
Y
8
S
3
4
0
%
1
5
6
9
5
3
8
0
3
8
,
5
1
7
5
8
0
0
,
7
4
5
5
0
4
8
0
Y
2
4
S
3
2
5
%
3
,
2
1
9
0
3
8
0
2
8
4
2
3
3
0
,
5
2
3
3
0
3
3
0
Y
M
A
6
2
2
-
6
/
1
2
/
2
4
M
A
6
1
2
-
6
/
1
2
/
2
4
6
S
3
4
0
%
3
2
9
1
0
3
8
0
7
0
3
4
0
7
9
0
,
8
8
8
5
0
7
3
0
7
0
T
M
T
6
2
T
M
T
6
4
5
0
Y
1
2
S
3
2
5
%
1
6
4
2
5
3
8
0
5
9
1
5
0
8
6
0
,
6
2
7
0
0
6
8
0
Y
2
4
S
3
2
5
%
5
2
0
0
3
8
0
5
1
7
5
3
4
0
,
4
4
6
0
0
6
0
0
Y
M
A
6
2
2
-
4
/
8
/
2
4
M
A
6
1
2
-
4
/
8
/
2
4
4
S
3
4
0
%
4
4
1
3
7
5
3
8
0
7
8
4
1
0
9
0
0
,
9
4
7
0
0
5
8
0
7
0
T
M
T
6
2
T
M
T
6
4
5
0
Y
8
S
3
4
0
%
2
5
6
8
5
3
8
0
5
1
2
2
0
8
7
0
,
7
4
7
0
0
6
0
0
Y
2
4
S
3
2
5
%
4
.
5
2
0
0
3
8
0
3
9
6
0
3
7
0
,
4
7
5
0
0
5
0
0
Y
M
A
6
2
2
-
4
/
6
/
1
2
M
A
6
1
2
-
4
/
6
/
1
2
4
S
3
4
0
%
5
5
1
3
7
0
3
8
0
1
0
5
5
7
0
8
4
0
,
9
4
9
0
0
7
5
0
7
0
T
M
T
6
2
T
M
T
6
4
5
0
Y
6
S
3
2
5
%
4
0
8
9
0
3
8
0
8
7
3
5
0
7
9
0
,
8
8
8
3
0
7
2
0
Y
1
2
S
3
2
5
%
2
0
4
3
0
3
8
0
7
0
2
1
0
7
0
0
,
6
2
1
1
0
0
1
0
5
0
Y
M
A
1
1
1
-
4
/
8
4
S
3
4
0
%
1
,
3
1
3
6
5
3
8
0
3
,
6
1
5
6
9
0
,
7
9
2
6
2
2
1
,
2
T
M
T
1
3
0
Y
8
S
3
1
5
%
0
,
8
6
4
5
3
8
0
3
,
9
8
,
4
4
8
0
,
6
5
2
5
2
5
Y
3
9
9
A
n
e
x
a
2
.
2
T
i
p
u
l
m
o
t
o
r
u
l
u
i
N
r
.
d
e
p
o
l
i
S
e
r
v
i
c
i
u
l
d
e
f
u
n
c
i
o
n
a
r
e
P
N
[
K
W
]
n
N
[
r
o
t
/
m
i
n
]
U
N
[
V
]
I
N
[
A
]
I
P
[
A
]
N
[
%
]
c
o
s
M
m
a
x
[
N
m
]
M
P
[
N
m
]
G
D
2
[
N
m
2
]
F
r
n
a
S
c
h
e
m
a
d
e
c
o
n
e
x
i
u
n
i
T
i
p
M
F
[
N
m
]
M
A
1
1
2
-
4
/
1
2
4
S
3
4
0
%
2
,
2
1
3
5
5
3
8
0
5
,
3
2
3
7
4
0
,
8
4
3
9
3
5
1
,
8
T
M
T
1
3
0
Y
1
2
S
3
1
5
%
0
,
7
3
5
5
3
8
0
4
,
8
7
,
3
3
7
0
,
6
0
3
7
3
7
Y
M
A
2
1
1
-
4
/
1
2
4
S
3
4
0
%
3
,
6
1
3
8
0
3
8
0
8
,
4
4
0
7
7
0
,
8
4
6
4
5
8
2
,
6
T
M
T
2
4
0
Y
1
2
S
3
1
5
%
1
,
3
4
0
5
3
8
0
7
1
3
4
8
0
,
5
8
5
9
5
8
Y
M
A
3
1
1
-
4
/
1
2
4
S
3
4
0
%
6
1
4
0
0
3
8
0
1
3
,
2
8
6
8
0
0
,
8
5
1
4
5
1
3
0
5
,
7
T
M
T
3
6
0
Y
1
2
S
3
1
5
%
2
,
5
3
8
0
3
8
0
1
1
,
5
2
3
5
0
0
,
6
5
1
3
5
1
3
5
Y
M
A
5
1
1
-
4
/
1
6
4
S
3
4
0
%
1
3
1
3
8
5
3
8
0
2
4
,
5
1
3
0
8
5
0
,
9
4
2
5
0
2
3
0
2
9
T
M
T
5
3
0
0
Y
1
6
S
3
1
5
%
3
,
5
2
8
5
3
8
0
1
5
,
5
3
0
5
2
0
,
6
6
2
3
5
2
3
5
Y
M
A
4
1
1
-
6
/
1
2
6
S
3
2
5
%
9
,
5
9
2
0
3
8
0
2
2
,
5
1
1
5
7
8
0
,
8
1
2
9
0
2
8
0
1
4
,
5
T
M
T
4
1
2
0
Y
1
2
S
3
1
5
%
5
3
8
5
3
8
0
1
7
,
5
3
8
5
7
0
,
7
7
2
2
0
2
2
0
Y
4
0
0
A
n
e
x
a
3
C
a
r
a
c
t
e
r
i
s
t
i
c
i
l
e
t
e
h
n
i
c
e
a
l
e
m
o
t
o
a
r
e
l
o
r
a
s
i
n
c
r
o
n
e
c
u
r
o
t
o
r
n
s
c
u
r
t
c
i
r
c
u
i
t
n
e
x
e
c
u
i
e
p
r
o
t
e
j
a
t
l
a
p
i
c
t
u
r
i
T
i
p
P
n
C
u
r
e
n
t
[
A
]
c
o
s
I
p
/
I
n
M
p
/
M
n
[
k
W
]
r
o
t
/
m
i
n
2
2
0
V
3
8
0
V
%
A
O
M
3
1
-
4
1
,
0
1
3
9
0
5
,
4
5
3
,
1
5
6
8
0
,
7
1
4
1
,
9
A
O
M
3
2
-
4
1
,
5
1
3
9
0
7
,
6
2
4
,
4
0
7
0
0
,
7
4
4
1
,
9
A
O
M
4
1
-
4
2
,
2
1
4
2
0
9
,
7
5
5
,
6
3
7
5
0
,
7
9
4
,
7
1
,
5
A
O
M
4
2
-
4
3
,
2
1
4
1
0
1
3
,
1
5
7
,
6
0
7
8
0
,
8
2
5
,
5
1
,
9
A
M
5
1
-
4
4
,
5
1
4
2
0
1
8
,
5
1
0
,
7
7
8
0
,
8
2
5
,
0
1
,
4
A
M
5
2
-
4
6
1
4
2
5
2
3
,
2
1
3
,
4
8
2
0
,
8
3
5
,
3
1
,
4
A
M
6
1
-
4
8
1
4
2
0
2
9
,
8
1
7
,
2
8
4
0
,
8
5
5
,
3
1
,
4
A
M
6
2
-
4
1
1
1
4
1
5
4
1
,
5
2
4
,
1
8
4
0
,
8
3
6
,
1
1
,
7
A
M
7
1
-
4
1
4
1
4
3
0
5
1
,
4
3
1
,
4
8
4
,
5
0
,
8
0
5
,
0
1
,
4
A
M
7
2
-
4
1
9
1
4
3
0
6
7
,
5
3
9
8
6
0
,
8
6
5
,
0
1
,
4
A
M
8
1
-
4
2
5
1
4
3
5
8
4
4
8
,
5
8
8
0
,
8
9
5
,
1
1
,
4
A
M
8
2
-
4
3
2
1
4
4
0
1
0
9
,
5
6
3
,
3
8
8
0
,
8
7
5
,
2
1
,
5
A
M
9
1
-
4
4
2
1
4
4
0
1
5
5
8
9
,
5
8
7
0
,
8
2
5
,
2
1
,
5
A
M
9
2
-
4
5
5
1
4
4
0
2
0
1
1
1
6
8
7
,
5
0
,
8
2
5
,
3
1
,
5
A
O
M
3
1
-
2
1
,
5
2
8
5
5
6
,
4
4
3
,
7
2
7
2
0
,
8
5
5
1
,
6
A
O
M
3
2
-
2
2
,
2
2
8
5
0
8
,
6
4
5
,
0
7
6
0
,
8
8
5
,
5
1
,
9
A
O
M
4
1
-
2
3
,
2
2
8
7
0
1
2
,
7
7
,
3
3
7
9
0
,
8
4
6
1
,
7
A
O
M
4
2
-
2
4
,
5
2
8
7
0
1
6
,
4
0
9
,
4
7
8
2
0
,
8
8
6
,
8
1
,
8
A
M
5
1
-
2
6
2
9
0
0
2
1
,
3
1
2
,
4
8
3
0
,
8
9
6
,
6
1
,
5
A
M
5
2
-
2
8
2
8
5
0
2
7
,
8
1
2
,
1
8
4
0
,
9
7
,
0
1
,
8
A
M
6
1
-
2
1
1
2
9
0
0
3
8
,
3
2
2
,
4
8
4
,
5
0
,
8
8
6
,
3
1
,
6
4
0
1
C
a
r
a
c
t
e
r
i
s
t
i
c
i
l
e
t
e
h
n
i
c
e
a
l
e
m
o
t
o
a
r
e
l
o
r
a
s
i
n
c
r
o
n
e
c
u
r
o
t
o
r
n
s
c
u
r
t
c
i
r
c
u
i
t
n
e
x
e
c
u
i
e
p
r
o
t
e
j
a
t
l
a
p
i
c
t
u
r
i
T
i
p
P
n
C
u
r
e
n
t
[
A
]
c
o
s
I
p
/
I
n
M
p
/
M
n
[
k
W
]
r
o
t
/
m
i
n
2
2
0
V
3
8
0
V
%
A
M
6
2
-
2
1
4
2
8
5
0
4
8
,
9
2
8
,
3
8
3
,
5
0
,
9
6
,
0
1
,
4
A
M
7
1
-
2
1
9
2
9
0
0
6
5
,
2
3
7
,
7
8
6
0
,
8
9
5
,
8
1
,
4
A
M
7
2
-
2
2
5
2
9
0
0
8
5
4
9
,
1
8
5
0
,
9
5
,
8
1
,
4
A
M
8
1
-
2
3
5
2
8
5
4
1
2
5
,
5
7
2
,
5
8
7
0
,
8
4
4
,
7
1
,
2
A
M
8
2
-
2
4
2
2
8
9
0
1
4
8
8
5
,
5
8
8
,
8
0
,
8
4
5
,
5
1
,
4
A
M
9
1
-
2
5
5
2
8
9
5
2
0
9
1
2
0
8
5
,
5
0
,
8
1
4
,
5
1
,
4
A
M
9
2
-
2
7
3
2
8
9
5
2
6
5
1
5
3
8
7
0
,
8
3
5
,
0
1
,
5
402
403
BIBLIOGRAFIE
1. Abbos M., Novotny D. The Stator Voltage-Controlled Source Inverter
Induction Motor Drive, IEEE 3/1982
2. Alexa D., Hrubaru O. Aplicaii ale convertoarelor statice de putere, Editura
Tehnic, Bucureti, 1989
3. Alexa D., Micu D. Invertoare i redresoare cu parametrii energetici ridicai,
Editura Tehnic, Bucureti, 1986
4. Ambros T. Maini electrice, Editura Universitas, Chiinu, 1992
5. Appelton A.D. .a. Superconducting Machines and Devices-Large Systems
Applications, Edited by S. Foner & B.B.Schwartz, Cambridge, Massachusetts,
1973
6. Atanasiu Ghe. Maini electrice, Litografia U.T.Timioara, vol.1 1994
7. Atanasiu Ghe., Soran I. Transformatorul electric. Construcie i proiectare,
Litografia U.T.Timioara, 1971
8. Babescu M. Maini electrice, Probleme I,II Timioara 1991- 1992.
9. Bl C., ogiu L., Covrig M. Maini electrice,probleme, Editura Didactic i
Pedagogic, Bucureti, 1974
10. Barret Ph. Regimes transitoires des machines tournantes electriques, Edidure
Eyrolles, Paris, 1982
11. Biro K., Viorel I.A. On the Syncronous Machine Dynamic Behaviour
Modelling, Proceedings of ICEM, 1994, vol. II
12. Boldea I. Transformatoare i maini electrice, Editura Didactic i
Pedagogic, Bucureti, 1994
13 Boldea I., Atanasiu Gh. Analiza unitar a mainilor electrice, Editura
Academiei, Bucureti, 1983
14 Boan N.V. Reglarea vitezei sistemelor de acionare electric, Editura
Tehnic, Bucureti, 1974
15 Braovan M Acionri electromecanice, Editura Didactica i Pedaogica,
Bucureti, 1967
16 Braovan M. .a. Acionri electrice - aplicaii industriale, Editura Tehnic,
Bucureti, 1977
17 Cluianu D. .a. Instalaii electrice la bordul navei, Editura Tehnic,
Bucureti, 1991
18 Cmpeanu A. Maini electrice - probleme fundamentale, Editura Scrisul
Romnesc Craiova, 1988
19 Cecunov C.A. Sudovie Electroprivodi I Electrodvijenie Sudov Isdatelstvo
Sudostrodenie, Leningrad 1976
20 Centea O., Novac I. Maini electrice Probleme, Litografia I.P., Timioara,
1957
21 Cioc, Bichir, Cristea Maini electrice - ndrumar de proiectare, Vol.II, Editura
Scrisul Romnesc, Craiova, 1975
404
22 Dade T.B. Advanced Electric Propulsion Power Generation and Power
Distribution, Naval Engineers Jurnal, March 1994, pag.83-92
23 Davidovici I. Parametrii mainilor electrice de curent alternativ, Editura
Tehnic, Bucureti, 1968
24 De Sabata I. Bazele electrotehnicii, Litografia I.P. Timioara, 1974
25 Dhers J. Vitesse variable des machines a induction structure des convertisseurs
et commande vectorielle, R.G.E. nr.5/05.92
26 Donald A. Equalized Juction is the Key in Paralleled I.G.B.T. Reliability,
International Rectifier, El Segundo, California, P.C.I.M., 11.1994
27 Dordea T. Proiectarea i construcia mainilor electrice, Litografia I.P.
Timioara, 1981
28 Dordea T. Maini electrice, Editura Didactic i Pedagogic, Bucureti, 1977
29 DOYLE T.J., .a. Propulsion Powers Electric Guns.A Comparision of Power
System Architectures, Naval Engineers Jurnal, 05.1992, pag.65-73
30 Drgnescu O. ncercrile mainilor electrice rotative, Editura Tehnic
Bucureti, 1987
31 Feete M. Modeling of Synchronous Machines for Stability Studies, Univ. of
Paderborn, Dept. of El. Eng. /1995
32 Fransua Al. Maini i sisteme de acionri electrice, Editura Tehnic,
Bucureti, 1978
33 Fransua Al., Saal C., opa I.,
Acionri electrice, Editura Didactic i pedagogic, Bucureti, 1975
34 Freidzon I.R. Acionarea electric a mecanismelor navale, Editura Tehnic,
Bucureti, 1979
35 Galan N. Consideraii privind teoria modern a mainii asincrone trifazate,
Electrotehnica nr.8, 1990
36 Gheorghiu S, Panait C Masini si sisteme se actionari electrice navale, Editura
Academei Romane, Bucuresti 2004
37 Gheorghiu S. Maini i acionri electrice, Editura Academiei Navale Mircea
cel Btrn, Constana, 2006
38 Gheorghiu S., .a. Acionri electrice navale, Litografia Institutului de Marin
Mircea cel Btrn, Constana, 1986
39 Gheorghiu S., .a. Maini i acionri electrice navale, Editura Leda &
Muntenia, Constana, 1999
40 Gheorghiu S., .a. Sisteme de acionare electric a propulsorului naval,
Editura Academiei Navale Mircea cel Btrn, Constana, 1999
41 Gheorghiu S., .a. Propulsia electric a navei, Editura Andrei aguna,
Constana, 2000
42 Gheorghiu S., .a. Maini electrice, Teorie i ncercri, Editura Gh. Asachi,
Iai, 2003
43 Haroshima F., Nayasi Dynamic Performance of Curent Source Inverter for
Induction Machines, I.E.E.E. - Proc. of IAS Annual Meeting, 1978
405
4 4 Heller, Hamata V. Harmonic Fields Effects in Induction Machines, Elsevier,
Amsterdam, 1977
45 Hultgren K.J. V.C.S.F. Cycloconverter Ships Service Electric Power
Equipment, Naval Engineers Jurnal, January 1992, pag.46-62
46 Kelemen A., Imecs M. Sisteme de reglare cu orientare dup cmp ale
mainilor de curent alternativ, Editura Academiei, Bucureti, 1989
47 Kelemen A. Acionri electrice, Editura Didactic i Pedagogic, Bucureti,
1979
48 Kelemen A., Imecs M. Electronic de putere, Editura Didactic i Pedagogic,
Bucureti, 1983
49 Kelemen A., Imecs M. Mutatoare, Editura Didactic i Pedagogic, Bucureti,
1977
50 Kovacs P. Analiza regimurilor tranzitorii la maini electrice, Editura Tehnic
Bucureti, 1980
51 Levi E. Field-Oriented Control of Induction Machines in the Presence of
Magnetic Saturation, E.M.P.S., 16, 1989
52 Lipo T., Cornell E. State-Variable Steady-State Analysis of a Controlled
Curent Induction Motor Drive, I.E.E.E. Trans IA, 06.1975
53 Mgureanu R. Maini electrice speciale pentru sisteme automate, Editura
Tehnic, Bucureti,1981
54 Mgureanu R., Micu D. Convertizoare statice de frecven n acionri cu
motoare asincrone, Editura Tehnic, Bucureti, 1989
55 Sorin Muuroi, Dorin Popovici Acionri electrice cu servomotoare, Editura
Politehnica, Timioara, 2006
56 Miulescu I., Cmpean I. Teoria navei, Editura Militar, Bucureti, 1973
57 Nanu Dumitru Instalaii electrice navale, Ed. Centrul tehnic Editorial al
armatei, Bucureti, 2009
58 Nedelcu V. Teoria conversiei electromecanice, Editura Tehnic, Bucureti,
1982
59 Nicolaide A. Maini electrice, Editura Scrisul Romnesc, Craiova, 1975
60 Novac I. Maini electrice, Litografia U.T. Timioara, 1996
61 Novac I., .a. Maini i acionri electrice, Editura Didactic i Pedagogic,
Bucureti, 1982
62 Richter R. Maini electrice, vol. IV, Editura Tehnic, Bucureti, 1960
63 Richter R. Maini electrice, vol. I, II, III, IV, Editura Tehnic, Bucureti, 1959
64 Saal C., opa I., Fransua Al., Micu E. Acionri electrice i automatizri,
Editura Didactic i Pedagogic, Bucureti,1980
65 Seracin E., Popovici D. Tehnica acionrilor electrice, Editura Tehnic,
Bucureti, 1985
66 Solomatin V.M. Cursovoe proectirovanie sudovovo electroprivoda, Izdatelstvo
Vsaia cola, Moskva, 1972
406
67 Vas P., Li J. Simulation of Vector-Controlled Induction Motor Drives, Proc. of
PCIM, 1993
68 Veenevski S. N. Caracteristicile motoarelor utilizate n acionri electrice,
Editura Tehnic, Bucureti, 1968
69 Viorel A., Biro K., Iancu V. Field-Harmonic Theory of Squirrel Cage Motor
Taking Slot Openings Into-Account, Proc.of ICEM 1986, Part II
70. Viorel A., Iancu V. Maini i acionri electrice, Litografia I.P. Cluj Napoca,
1990
71. Viorel A., .a. Field Orientation Concept in Induction Motor Control, a New
Point of View, Proc. of PCIM, 1993
72 Watson G.O. Marine Electrical Practice, 5th Edition, London, 1986
73. *** R.N.R. - Instalaii electrice de propulsie, Bucureti, 1993
74. *** Spravocinic Sudovovo Electrotehnica, vol. I,II,III Izdatelstvo
Sudostronie, Leningrad, 1975
S-ar putea să vă placă și
- Instalatii Electrice Navale Nanu Dumitru PDFDocument760 paginiInstalatii Electrice Navale Nanu Dumitru PDFCatalin Apetre100% (8)
- Actionari Hidraulice Si Pneumatice Curs Univ DS PDFDocument461 paginiActionari Hidraulice Si Pneumatice Curs Univ DS PDFMDgoodÎncă nu există evaluări
- Album Forme NaveDocument291 paginiAlbum Forme NaveMunteanu Sylvèr RobèrtÎncă nu există evaluări
- Actionari Electrice NavaleDocument212 paginiActionari Electrice NavaleSorin Marius100% (1)
- Teză de DoctoratDocument107 paginiTeză de DoctoratDana VerejanÎncă nu există evaluări
- Sae Tot PDFDocument420 paginiSae Tot PDFVlad100% (2)
- IEN Vol1Document225 paginiIEN Vol1Sumer Sachir100% (2)
- Mentenanta NavelorDocument46 paginiMentenanta NavelorTimÎncă nu există evaluări
- Pressed PDFDocument384 paginiPressed PDFMihali IonelÎncă nu există evaluări
- Producerea Si Distributia Energiei ElectDocument380 paginiProducerea Si Distributia Energiei ElectCristian Sandu100% (1)
- Capitolul II Motoare Si Turbine NavaleDocument176 paginiCapitolul II Motoare Si Turbine NavaleMarius Condurache100% (1)
- PCS PDFDocument214 paginiPCS PDFGabi MărgeanÎncă nu există evaluări
- Echipamente Eelectrice Pentru ARDocument121 paginiEchipamente Eelectrice Pentru ARMatis OvidiuÎncă nu există evaluări
- Tradus FANUC Educational Cell Manual-1Document66 paginiTradus FANUC Educational Cell Manual-1Maria MorariuÎncă nu există evaluări
- Proiectarea Instalatiilor NavaleDocument106 paginiProiectarea Instalatiilor NavaleIrofte IulianÎncă nu există evaluări
- Cuplarea Gen Sincrone in ParalelDocument14 paginiCuplarea Gen Sincrone in ParalelCadere Lucian100% (1)
- Instalatii Energetice NavaleDocument11 paginiInstalatii Energetice NavaleVasiMacoveiÎncă nu există evaluări
- Actionari Hidraulice PDFDocument149 paginiActionari Hidraulice PDFGeorge_Wabag_2014Încă nu există evaluări
- Indrumar AE v4Document202 paginiIndrumar AE v4Madalin StanciuÎncă nu există evaluări
- Curs SenDocument880 paginiCurs SenGogo ChannelÎncă nu există evaluări
- Proiectarea Asistată de Calculator A Echipamentelor Pentru Procese IndustrialeDocument255 paginiProiectarea Asistată de Calculator A Echipamentelor Pentru Procese IndustrialeGhena FlaviuÎncă nu există evaluări
- Imb CursDocument273 paginiImb CursFaqROÎncă nu există evaluări
- Manual de Operare: Convertizor de Frecvenţă Movitrac LTE-B+Document132 paginiManual de Operare: Convertizor de Frecvenţă Movitrac LTE-B+Gelu TănaseÎncă nu există evaluări
- Propulsie 2Document58 paginiPropulsie 2Liviu AnghelÎncă nu există evaluări
- Studiu Asupra Procedeelor de Ardere Stratificată Folosite La MAS in Vederea Reducerii PoluăriiDocument25 paginiStudiu Asupra Procedeelor de Ardere Stratificată Folosite La MAS in Vederea Reducerii PoluăriiCornel Cristian PredeanuÎncă nu există evaluări
- Cursuri DutuDocument364 paginiCursuri DutugeorgeÎncă nu există evaluări
- Curs MPNDocument154 paginiCurs MPNPaula MateiÎncă nu există evaluări
- Electromecanicxi Exploatarea Instalatiilor Electromecanice NDocument57 paginiElectromecanicxi Exploatarea Instalatiilor Electromecanice NDanValeriu100% (1)
- Automobilul Construcţie Funcţionare Depanare PDFDocument389 paginiAutomobilul Construcţie Funcţionare Depanare PDFTiberius-Constantin SpatariuÎncă nu există evaluări
- HFN - CursDocument297 paginiHFN - CursVornamen DanielÎncă nu există evaluări
- Curs Actionari Electrice Navale-CropDocument412 paginiCurs Actionari Electrice Navale-CropV. Grigoras100% (1)
- Geometria 2010Document43 paginiGeometria 2010narci15Încă nu există evaluări
- Catalog Senzori OMRONDocument141 paginiCatalog Senzori OMRONKiLLzOrÎncă nu există evaluări
- Dictionar MotoDocument4 paginiDictionar MotoGabriela Diaconu100% (1)
- Manual Generator Leroy SomerDocument151 paginiManual Generator Leroy SomerDaniel ClitÎncă nu există evaluări
- Achp CursDocument792 paginiAchp CursFlori Je100% (1)
- Notiunea de Propulsie Electrica A NavelorDocument3 paginiNotiunea de Propulsie Electrica A NavelorAdrian-Madalin NedelcuÎncă nu există evaluări
- Lab. Masurare VibratiiDocument30 paginiLab. Masurare VibratiicornelÎncă nu există evaluări
- Modele Matematice Ale Actionarilor M.A Prin Convertoare PDFDocument125 paginiModele Matematice Ale Actionarilor M.A Prin Convertoare PDFvalentinmullerÎncă nu există evaluări
- 1cuplarea Generatoarelor Sincrone in ParalelDocument8 pagini1cuplarea Generatoarelor Sincrone in ParalelAlex AndruÎncă nu există evaluări
- Actionari ElectriceDocument280 paginiActionari ElectriceVuşcan OvidiuÎncă nu există evaluări
- Suport de Curs CSC - IFRDocument140 paginiSuport de Curs CSC - IFRPaulyk AlecsÎncă nu există evaluări
- Producerea Frigului Artificial in Instalatiile Frigorifice Cu Compresor Si Racire DirectaDocument31 paginiProducerea Frigului Artificial in Instalatiile Frigorifice Cu Compresor Si Racire DirectaTudorÎncă nu există evaluări
- Suport Curs - Investigarea Accidentelor MaritimeDocument52 paginiSuport Curs - Investigarea Accidentelor MaritimeIulian Domi100% (1)
- Erimai CursDocument407 paginiErimai CursCornel N. ŞeitanÎncă nu există evaluări
- Propulsia El. in C.ADocument31 paginiPropulsia El. in C.AMarius HirdauÎncă nu există evaluări
- Tematica Elmec NavalacombustibilDocument21 paginiTematica Elmec NavalacombustibilAndrei ȚupaÎncă nu există evaluări
- 4.7 Echipamente Pneumatice Si Electronice de AutomatizareDocument31 pagini4.7 Echipamente Pneumatice Si Electronice de AutomatizareolgapetricÎncă nu există evaluări
- Actionari Electrice de Curent Continuu PDFDocument240 paginiActionari Electrice de Curent Continuu PDFPaul Lucian VentelÎncă nu există evaluări
- Actionari Electrice de CCDocument239 paginiActionari Electrice de CCConstantin Popa67% (3)
- Actionari Electrice CursDocument303 paginiActionari Electrice Cursrtec83Încă nu există evaluări
- Sae Navale 1Document277 paginiSae Navale 1Lemnaru100% (2)
- Carte - Elemente de Executie ElectriceDocument161 paginiCarte - Elemente de Executie ElectriceMarin AndraÎncă nu există evaluări
- Statii Electrice Si Posturi de TransformareDocument357 paginiStatii Electrice Si Posturi de Transformarertec8392% (12)
- Actionari Electrice Navale Final PDFDocument246 paginiActionari Electrice Navale Final PDFStefan Manea100% (1)
- Convertoare Electromecanice, Notiuni Teoretice FundamentaleDocument136 paginiConvertoare Electromecanice, Notiuni Teoretice FundamentaleMarius BonceaÎncă nu există evaluări
- Auxiliar Circuite Electronice PDFDocument170 paginiAuxiliar Circuite Electronice PDFElena NitaÎncă nu există evaluări
- Sistem Inteligent de Control Al Alimentarii Vehiculelor Electrice PDFDocument66 paginiSistem Inteligent de Control Al Alimentarii Vehiculelor Electrice PDFȘtefan VelixÎncă nu există evaluări
- ElectronicaindustrialaDocument384 paginiElectronicaindustrialaLa Dame Aux Camélias100% (1)
- Protectia Sistemelor ElectriceDocument340 paginiProtectia Sistemelor ElectricepiticelÎncă nu există evaluări