S-ar putea să vă placă și
- cnc3 PDFDocument9 paginicnc3 PDFCristina TomițăÎncă nu există evaluări
- Algebra LiniaraDocument71 paginiAlgebra LiniaraChris MaherÎncă nu există evaluări
- Cursul 05 - IIDocument7 paginiCursul 05 - IIDarabaGabriellÎncă nu există evaluări
- Tema 9Document3 paginiTema 9NeFe WeÎncă nu există evaluări
- Curs2 EconDocument5 paginiCurs2 EconDana Andronic-GhioneaÎncă nu există evaluări
- Curs Matematica Semestrul 1Document72 paginiCurs Matematica Semestrul 1Emilian RusuÎncă nu există evaluări
- Spatii VectorialeDocument12 paginiSpatii VectorialeSica GrigorasÎncă nu există evaluări
- Curs 1Document5 paginiCurs 1Madalina GhiutaÎncă nu există evaluări
- Suport Curs VOCATIONAL Unit 6. Spatii Vectoriale. Baze Si Dimensiuni, Coordonate, Schimbarea Bazelor PDFDocument16 paginiSuport Curs VOCATIONAL Unit 6. Spatii Vectoriale. Baze Si Dimensiuni, Coordonate, Schimbarea Bazelor PDFPaslaru FlorinÎncă nu există evaluări
- Notiuni de Algebra LiniaraDocument12 paginiNotiuni de Algebra LiniaraIvf ValentinaÎncă nu există evaluări
- Cap 2Document10 paginiCap 2claudiaÎncă nu există evaluări
- MatematiciDocument37 paginiMatematiciEvelyn DoroteaÎncă nu există evaluări
- Matematica Facultate An 1 CursDocument9 paginiMatematica Facultate An 1 CursAdelina TrifÎncă nu există evaluări
- Algebra Si Geometrie Pag 16Document146 paginiAlgebra Si Geometrie Pag 16Mr_LogaÎncă nu există evaluări
- Curs 3Document11 paginiCurs 3Denisa AngelescuÎncă nu există evaluări
- Curs 1 MateDocument10 paginiCurs 1 MateAdnana Alexandra PavelÎncă nu există evaluări
- GC 1Document59 paginiGC 1Oany GabitzaÎncă nu există evaluări
- CursDocument6 paginiCursAndrei StoianÎncă nu există evaluări
- Spatii VectorialeDocument5 paginiSpatii VectorialeEbruÎncă nu există evaluări
- Badin Carpusca Ciurea Serban Algebra Liniara Culegere de Probleme 1999Document123 paginiBadin Carpusca Ciurea Serban Algebra Liniara Culegere de Probleme 1999Ionela PinticăÎncă nu există evaluări
- Baze ExercitiiDocument27 paginiBaze ExercitiiLoreStroescuÎncă nu există evaluări
- SerbanDocument123 paginiSerbanAndrei BalasaÎncă nu există evaluări
- Curs 2Document8 paginiCurs 2Madalina GhiutaÎncă nu există evaluări
- Spatii Vectoriale Finit DimensionaleDocument60 paginiSpatii Vectoriale Finit DimensionaleDaniel SosaÎncă nu există evaluări
- Algebra Dif UmcDocument9 paginiAlgebra Dif UmcSecara NicolaeÎncă nu există evaluări
- Spatii VectorialeDocument8 paginiSpatii VectorialeBabei IlieÎncă nu există evaluări
- Agad PDFDocument244 paginiAgad PDFRaresh TeleanuÎncă nu există evaluări
- Spatii VectorialeDocument16 paginiSpatii VectorialeAndrei TufisiÎncă nu există evaluări
- Baze În Plan Şi În Spaţiu. Sisteme Carteziene de Coordonate. Coordonatele Vectorului Şi Punctului. Operaţii Liniare Cu Vectori În CoordonateDocument4 paginiBaze În Plan Şi În Spaţiu. Sisteme Carteziene de Coordonate. Coordonatele Vectorului Şi Punctului. Operaţii Liniare Cu Vectori În CoordonateAlexandr TrimaliucÎncă nu există evaluări
- Curs3 EcDocument5 paginiCurs3 EcDana Andronic-GhioneaÎncă nu există evaluări
- Curs 4 AlgebraDocument5 paginiCurs 4 AlgebraLavinia CotoarbaÎncă nu există evaluări
- Unitatea 5Document7 paginiUnitatea 5Vlad George BoancăÎncă nu există evaluări
- Curs 11 Algegra 2Document6 paginiCurs 11 Algegra 2Oana MaryaÎncă nu există evaluări
- Algebra Liniara CursDocument114 paginiAlgebra Liniara CursSirghi AndreiÎncă nu există evaluări
- Algebra Geom Analitica BercuDocument103 paginiAlgebra Geom Analitica BercuVictor PanaitÎncă nu există evaluări
- Curs 1 Spatii VectorialeDocument5 paginiCurs 1 Spatii VectorialeRacheru AndreiÎncă nu există evaluări
- Curs III, IV, V - Spatii VectorialeDocument37 paginiCurs III, IV, V - Spatii VectorialeLoreStroescuÎncă nu există evaluări
- Cap-02 (Spatii VectorialeDocument28 paginiCap-02 (Spatii VectorialeGigimon91Încă nu există evaluări
- Calculul Valorilor Proprii Şi Vectorilor Proprii Pentru Matrice NesimetriceDocument12 paginiCalculul Valorilor Proprii Şi Vectorilor Proprii Pentru Matrice NesimetriceAndra-Mihaela StateÎncă nu există evaluări
- Curs II-AM-ICDocument9 paginiCurs II-AM-ICAlexandr StanislavschiÎncă nu există evaluări
- C07-Valori Si Vectori Proprii PDFDocument34 paginiC07-Valori Si Vectori Proprii PDFVi7eRÎncă nu există evaluări
- Subspatii VectorialeDocument65 paginiSubspatii VectorialeCarmen Iuliana100% (2)
- Curs 5 Alg Lin CTIDocument17 paginiCurs 5 Alg Lin CTIadella4everÎncă nu există evaluări
- M MA.04 Capitol (16.11.2012)Document8 paginiM MA.04 Capitol (16.11.2012)Alexandra PrefacÎncă nu există evaluări
- Cap-06 (Transformari Liniare)Document33 paginiCap-06 (Transformari Liniare)Adrian Pop100% (2)
- Algebra-Modulul IV - Aplicatii Liniare, Valori Si Vectori Proprii PDFDocument40 paginiAlgebra-Modulul IV - Aplicatii Liniare, Valori Si Vectori Proprii PDFAlex PascuÎncă nu există evaluări
- ALGADDocument244 paginiALGADSezen CiorabaiÎncă nu există evaluări
- Curs Mecanica Pitulice PDFDocument186 paginiCurs Mecanica Pitulice PDFPetrică NeculaÎncă nu există evaluări
- Tema AL VVP-SVEDocument33 paginiTema AL VVP-SVEdolo boboÎncă nu există evaluări
- Seminar 5-6Document30 paginiSeminar 5-6Beniamin ApopeiÎncă nu există evaluări
- Curs 7 AlgebraDocument9 paginiCurs 7 AlgebraOana MaryaÎncă nu există evaluări
- Matematici EconomiceDocument142 paginiMatematici EconomiceGlont GeoÎncă nu există evaluări
- Capitolul 2 - Matematica SuperioaraDocument15 paginiCapitolul 2 - Matematica SuperioaraBoboc IonelaÎncă nu există evaluări
- Algebra-Cursul 1Document7 paginiAlgebra-Cursul 1AnaÎncă nu există evaluări
- Referat Implant DentarDocument27 paginiReferat Implant DentarSimona NegreaÎncă nu există evaluări
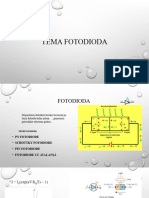
- Tema 12 - 2 DOE FotodiodaDocument73 paginiTema 12 - 2 DOE FotodiodaNeFe WeÎncă nu există evaluări
- Prez - BM, T 1Document14 paginiPrez - BM, T 1Stina Adrea-ElisaÎncă nu există evaluări
- Tema 12 - 3 DOE Dioda Laser, Alte.Document72 paginiTema 12 - 3 DOE Dioda Laser, Alte.NeFe WeÎncă nu există evaluări
- Tema 12 1 DOE Clasificare FotorezistoareDocument46 paginiTema 12 1 DOE Clasificare FotorezistoareNeFe WeÎncă nu există evaluări
- Plati Pentru ServiciiDocument10 paginiPlati Pentru ServiciiNeFe WeÎncă nu există evaluări
- Me6 LabDocument5 paginiMe6 LabNeFe WeÎncă nu există evaluări
- Tema 7 Diode Gunn, Cu AvalanșăDocument49 paginiTema 7 Diode Gunn, Cu AvalanșăNeFe WeÎncă nu există evaluări
- Me6 LabDocument5 paginiMe6 LabNeFe WeÎncă nu există evaluări
- Tema 3. Proprietatile Biomaterialelor (1) -КонвертированDocument17 paginiTema 3. Proprietatile Biomaterialelor (1) -КонвертированNeFe WeÎncă nu există evaluări
- Biomateriale ConductiveDocument7 paginiBiomateriale ConductiveNeFe WeÎncă nu există evaluări
- Labbiofizică4 CosteaDocument4 paginiLabbiofizică4 CosteaNeFe WeÎncă nu există evaluări
- Functia RinichiuluiDocument20 paginiFunctia RinichiuluiNeFe WeÎncă nu există evaluări
- Nervul OpticDocument20 paginiNervul OpticNeFe WeÎncă nu există evaluări
- Întrebări Pentru Evaluarea A IIDocument2 paginiÎntrebări Pentru Evaluarea A IINeFe WeÎncă nu există evaluări
- Lab - 3 BioDocument5 paginiLab - 3 BioMihai MarchitanÎncă nu există evaluări
- Labnr 5 BioDocument6 paginiLabnr 5 BioNeFe WeÎncă nu există evaluări
- Tema 15Document5 paginiTema 15NeFe WeÎncă nu există evaluări
- Laborator 1 GC Anul IDocument24 paginiLaborator 1 GC Anul INeFe WeÎncă nu există evaluări
- Phoropter HandoutsDocument9 paginiPhoropter HandoutsNeFe WeÎncă nu există evaluări
- Lab - 4 BioDocument4 paginiLab - 4 BioMihai MarchitanÎncă nu există evaluări
- Labnr 5 BioDocument6 paginiLabnr 5 BioNeFe WeÎncă nu există evaluări
- Raport: Lucrare de Laborator Nr. 4 La Structuri de Date Si AlgoritmiDocument11 paginiRaport: Lucrare de Laborator Nr. 4 La Structuri de Date Si AlgoritmiNeFe WeÎncă nu există evaluări
- C. M PC Lab 7Document11 paginiC. M PC Lab 7NeFe WeÎncă nu există evaluări
- Lucrare de Laborator 2 (Python)Document3 paginiLucrare de Laborator 2 (Python)NeFe WeÎncă nu există evaluări
- Lucru IndividualDocument2 paginiLucru IndividualVera PînteaÎncă nu există evaluări
- LAB FCIM CR-223 PSA Caradjov ClementieDocument5 paginiLAB FCIM CR-223 PSA Caradjov ClementieNeFe WeÎncă nu există evaluări
- LAB1MDMBDocument10 paginiLAB1MDMBNeFe WeÎncă nu există evaluări
- Lucrare de Laborator 3 (Python)Document1 paginăLucrare de Laborator 3 (Python)NeFe WeÎncă nu există evaluări