S-ar putea să vă placă și
- Curs2 EconDocument5 paginiCurs2 EconDana Andronic-GhioneaÎncă nu există evaluări
- Spatii VectorialeDocument12 paginiSpatii VectorialeSica GrigorasÎncă nu există evaluări
- Algebra Si Geometrie Pag 16Document146 paginiAlgebra Si Geometrie Pag 16Mr_LogaÎncă nu există evaluări
- Curs3 EcDocument5 paginiCurs3 EcDana Andronic-GhioneaÎncă nu există evaluări
- Matematica Facultate An 1 CursDocument9 paginiMatematica Facultate An 1 CursAdelina TrifÎncă nu există evaluări
- Suport Curs VOCATIONAL Unit 6. Spatii Vectoriale. Baze Si Dimensiuni, Coordonate, Schimbarea Bazelor PDFDocument16 paginiSuport Curs VOCATIONAL Unit 6. Spatii Vectoriale. Baze Si Dimensiuni, Coordonate, Schimbarea Bazelor PDFPaslaru FlorinÎncă nu există evaluări
- Baze ExercitiiDocument27 paginiBaze ExercitiiLoreStroescuÎncă nu există evaluări
- Spatii VectorialeDocument21 paginiSpatii VectorialeZaharia MirelaÎncă nu există evaluări
- Curs Matematica Semestrul 1Document72 paginiCurs Matematica Semestrul 1Emilian RusuÎncă nu există evaluări
- Capitolul I Spaţii Vectoriale 1 Definiţia Spaţiului VectorialDocument8 paginiCapitolul I Spaţii Vectoriale 1 Definiţia Spaţiului VectorialS AdrianÎncă nu există evaluări
- cnc3 PDFDocument9 paginicnc3 PDFCristina TomițăÎncă nu există evaluări
- Curs 1 Spatii VectorialeDocument5 paginiCurs 1 Spatii VectorialeRacheru AndreiÎncă nu există evaluări
- Curs II-AM-ICDocument9 paginiCurs II-AM-ICAlexandr StanislavschiÎncă nu există evaluări
- Spatii VectorialeDocument5 paginiSpatii VectorialeEbruÎncă nu există evaluări
- Cap 2Document10 paginiCap 2claudiaÎncă nu există evaluări
- Tema 9Document3 paginiTema 9NeFe WeÎncă nu există evaluări
- MatematiciDocument37 paginiMatematiciEvelyn DoroteaÎncă nu există evaluări
- Curs 3Document11 paginiCurs 3Denisa AngelescuÎncă nu există evaluări
- Badin Carpusca Ciurea Serban Algebra Liniara Culegere de Probleme 1999Document123 paginiBadin Carpusca Ciurea Serban Algebra Liniara Culegere de Probleme 1999Ionela PinticăÎncă nu există evaluări
- Curs 1Document5 paginiCurs 1Madalina GhiutaÎncă nu există evaluări
- Tema 10Document2 paginiTema 10NeFe WeÎncă nu există evaluări
- Subspatii VectorialeDocument65 paginiSubspatii VectorialeCarmen Iuliana100% (2)
- Cap-02 (Spatii VectorialeDocument28 paginiCap-02 (Spatii VectorialeGigimon91Încă nu există evaluări
- Curs 11 Algegra 2Document6 paginiCurs 11 Algegra 2Oana MaryaÎncă nu există evaluări
- GC 1Document59 paginiGC 1Oany GabitzaÎncă nu există evaluări
- Agad PDFDocument244 paginiAgad PDFRaresh TeleanuÎncă nu există evaluări
- Curs 2Document8 paginiCurs 2Madalina GhiutaÎncă nu există evaluări
- Curs III, IV, V - Spatii VectorialeDocument37 paginiCurs III, IV, V - Spatii VectorialeLoreStroescuÎncă nu există evaluări
- Spatii VectorialeDocument8 paginiSpatii VectorialeBabei IlieÎncă nu există evaluări
- Curs 7 AlgebraDocument9 paginiCurs 7 AlgebraOana MaryaÎncă nu există evaluări
- Capitolul 2 - Matematica SuperioaraDocument15 paginiCapitolul 2 - Matematica SuperioaraBoboc IonelaÎncă nu există evaluări
- Curs 5 Alg Lin CTIDocument17 paginiCurs 5 Alg Lin CTIadella4everÎncă nu există evaluări
- Curs 2Document5 paginiCurs 2FirstHeroÎncă nu există evaluări
- Algebra Liniara CursDocument114 paginiAlgebra Liniara CursSirghi AndreiÎncă nu există evaluări
- Spatii Vectoriale Finit DimensionaleDocument60 paginiSpatii Vectoriale Finit DimensionaleDaniel SosaÎncă nu există evaluări
- Seminar 5-6Document30 paginiSeminar 5-6Beniamin ApopeiÎncă nu există evaluări
- Metode Numerice de Calcul OperationalDocument16 paginiMetode Numerice de Calcul OperationalIuliu DamianÎncă nu există evaluări
- Matematici Aplicate in Economie Sinteza 2008Document11 paginiMatematici Aplicate in Economie Sinteza 2008Gabriel DobreÎncă nu există evaluări
- ALGADDocument244 paginiALGADSezen CiorabaiÎncă nu există evaluări
- Elemente de Calcul VectorialDocument9 paginiElemente de Calcul VectorialLadus TafusÎncă nu există evaluări
- Curs 1 MateDocument10 paginiCurs 1 MateAdnana Alexandra PavelÎncă nu există evaluări
- Algebra-Cursul 1Document7 paginiAlgebra-Cursul 1AnaÎncă nu există evaluări
- Lab5 MatlabDocument11 paginiLab5 MatlabMarius MurgociÎncă nu există evaluări
- Spatii VectorialeDocument16 paginiSpatii VectorialeAndrei TufisiÎncă nu există evaluări
- Algebra LiniaraDocument71 paginiAlgebra LiniaraChris MaherÎncă nu există evaluări
- SerbanDocument123 paginiSerbanAndrei BalasaÎncă nu există evaluări
- Matematica Aplicata in Economie PDFDocument180 paginiMatematica Aplicata in Economie PDFAnda Andreea100% (1)
- Matematici Aplicate in Economie - Subiecte Si Aplicatii PDFDocument70 paginiMatematici Aplicate in Economie - Subiecte Si Aplicatii PDFvd iancu86% (7)
- Seminar 3Document6 paginiSeminar 3andreea tomaÎncă nu există evaluări
- C07-Valori Si Vectori Proprii PDFDocument34 paginiC07-Valori Si Vectori Proprii PDFVi7eRÎncă nu există evaluări
- Calculul Valorilor Proprii Şi Vectorilor Proprii Pentru Matrice NesimetriceDocument12 paginiCalculul Valorilor Proprii Şi Vectorilor Proprii Pentru Matrice NesimetriceAndra-Mihaela StateÎncă nu există evaluări
- Spatii Vectorial EtDocument15 paginiSpatii Vectorial EtFabian Marian RaduÎncă nu există evaluări
- Curs 1Document5 paginiCurs 1Simona MihaelaÎncă nu există evaluări
- 1GS-3089 JCB 535-125 SH 2008 1424241 Dorna Agri SaDocument2 pagini1GS-3089 JCB 535-125 SH 2008 1424241 Dorna Agri SaIvf ValentinaÎncă nu există evaluări
- 145bis DORNA AGRI POMPA 385 Adr 19 03 12Document2 pagini145bis DORNA AGRI POMPA 385 Adr 19 03 12Ivf ValentinaÎncă nu există evaluări
- 145bis DORNA AGRI POMPA 385 Adr 19 03 12Document2 pagini145bis DORNA AGRI POMPA 385 Adr 19 03 12Ivf ValentinaÎncă nu există evaluări
- 1GS-3095 535-95 Dorna Agri SaDocument3 pagini1GS-3095 535-95 Dorna Agri SaIvf ValentinaÎncă nu există evaluări
- Catalog PRAMAC - Grupuri Electrogene PDFDocument52 paginiCatalog PRAMAC - Grupuri Electrogene PDFIvf ValentinaÎncă nu există evaluări
- 1GS-3089 JCB 535-125 SH 2008 1424241 Dorna Agri SaDocument2 pagini1GS-3089 JCB 535-125 SH 2008 1424241 Dorna Agri SaIvf ValentinaÎncă nu există evaluări
- DerivabilitateDocument5 paginiDerivabilitateffilipvasÎncă nu există evaluări
- MARKETINGDocument107 paginiMARKETINGIvf ValentinaÎncă nu există evaluări
- Bazele Contabilitatii I CIG IDDocument123 paginiBazele Contabilitatii I CIG IDParaschiv Ionut CristinelÎncă nu există evaluări
- Test I MicroDocument3 paginiTest I MicroIvf ValentinaÎncă nu există evaluări
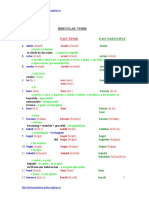
- Lista Verbelor NeregulateDocument25 paginiLista Verbelor NeregulateJack VezeteuÎncă nu există evaluări
- Maktub (In Romana) - Paulo CoelhoDocument45 paginiMaktub (In Romana) - Paulo Coelhohussainali59100% (1)
- Catalog PRAMAC - Grupuri Electrogene PDFDocument52 paginiCatalog PRAMAC - Grupuri Electrogene PDFIvf ValentinaÎncă nu există evaluări
- Microeconomie - U.I. - 1 Din 14Document32 paginiMicroeconomie - U.I. - 1 Din 14Andreea Elena JarneaÎncă nu există evaluări
- Scrisoare de IntentieDocument3 paginiScrisoare de IntentieIvf ValentinaÎncă nu există evaluări
- COMANDA DraftDocument1 paginăCOMANDA DraftIvf ValentinaÎncă nu există evaluări
- Ambalajul - Factor Al Calitatii Si CompeDocument7 paginiAmbalajul - Factor Al Calitatii Si CompeanaÎncă nu există evaluări