Documente Academic
Documente Profesional
Documente Cultură
TTM Teoria Navei
Încărcat de
Patricia CottonDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
TTM Teoria Navei
Încărcat de
Patricia CottonDrepturi de autor:
Formate disponibile
2.
TEORIA NAVEI
2.1. NOIUNI FUNDAMENTALE
Prin caliti nautice nelegem acele caliti ale navei specifice plutirii pe ap i care
sunt determinate de interaciunea nav-mediu nconjurtor.
tiina care se ocup cu studiul legilor crora se supun calitile nautice ale navei i
elaboreaz metodele de calcul al mrimilor acestor caliti se numete teoria navei.
Principalele caliti nautice ale navei sunt: flotabilitatea, stabilitatea, nescufundarea,
oscilaiile navei, rezistena la naintare i guvernana navei. Primele trei caliti nautice sunt
studiate n prima parte a teoriei-navei, denumit statica navei, iar urmtoarele trei caliti
nautice sunt studiate n partea a doua, denumit dinamica navei.
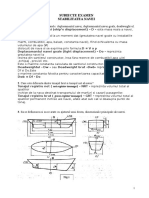
2.1.1. Geometria navei
Calitile nautice ale unei nave sunt determinate de forma i caracteristicile
contururilor ei. Reprezentarea clar i exact a formei contururilor navei se poate face grafic
prin planul de forme. n teoria navei se folosesc ca plane principale de proiecie urmtoarele
trei plane perpendiculare ntre ele:
- planul vertical-longitudinal, care mparte nava n pri simetrice bordul tribord i
bordul babord se numete planul diametral al navei;
- planul vertical-transversal, care trece prin jumtatea lungimii navei i mparte nava
n dou pri sectorul prova i sectorul pupa se numete planul cuplului
maestru
*
;
- planul orizontal, care coincide cu suprafaa apei linitite la pescajul navei cu
ncrctur normal mparte corpul navei n partea imers i partea emers se
numete planul liniei de plutire.
Aceste trei plane diametral, planul seciunii maestre i planul plutirii constituie
planele de
proiecie ale planului de forme cu ajutorul cruia se poate reprezenta forma geometric a
suprafeei exterioare a corpului navei.
Prin intersectarea suprafeei corpului navei cu plane paralele cu planele de proiecie
se obin trei sisteme de seciuni, i anume:
- seciuni longitudinale proieciile navei pe planul diametral sau curbele obinute
prin intersecia corpului navei cu plane paralele cu planul diametral;
- cupluri (seciuni transversale) proieciile navei pe planul seciunii maestre; ele
sunt curbele obinute prin intersecia corpului navei cu plane paralele cu planul
seciunii maestre;
- linii de plutire sau linii de ape (seciuni orizontale) proieciile navei pe planul liniei
de plutire sau curbele obinute prin intersecia corpului navei pe planul liniei de
plutire sau curbele obinute prin intersecia corpului navei cu plane paralele cu
planul plutirii.
Fig. 2.1.
n mod convenional, se numete plan de baz planul orizontal care trece prin
marginea inferioar a chilei.
Linia format prin intersecia planului de baz cu planul diametral al navei se numete
linie de baz sau linie de construcie a navei.
De la planul de baz se msoar pe vertical toate dimensiunile i punctele
caracteristice ale navei.
Principalele dimensiuni care definesc geometria unei nave sunt urmtoarele:
- lungimea navei (L) este distana msurat n planul diametral ntre punctele
extreme ale navei; poate fi de trei feluri: maxim, la linia de plutire, ntre
perpendiculare;
- limea navei (B) este distana msurat ntre marginile exterioare ale cuplurilor;
poate fi: lime maxim, lime msurat la linia de plutire, lime msurat pe
punte;
- pescajul navei (T) este distana msurat pe vertical de la linia de baz pn la
linia de plutire.
n funcie de locul unde se msoar, pescajul poate fi: pescaj mediu (Tm), cnd se
msoar la
cuplul maestru, pescaj prova (Tpv) i pescaj pupa (Tpp).
n cazul cnd nava st pe chil dreapt:
Tpv = Tpp = Tm.
n cazul cnd pescajul prova i pupa difer, pescajul mediu al navei se calculeaz cu
formula:
2
Tpv Tpp
Tm
+
Diferena dintre pescajul prova i pupa se numete asiet ():
=Tpv-Tpp.
Cnd are valori negative nava este aprovat (are asit prova), iar cnd are valori
pozitive , nava este apupat (are asiet pupa);
- nlimea bordului (H) este nlimea msurat pe vertical de linia de baz pn
la linia de intersecie a bordajului cu planul punii superioare.
Diferena dintre nlimea bordului (H) i pescajul navei (Tm) constituie nlimea
bordului liber
(F):
F= H-Tm.
Forma corpului navei se caracterizeaz prin raporturile dintre principalele dimensiuni
T
H
T
B
H
B
T
L
H
L
B
L
, , , , ,
i coeficienii de finee , , , , .
Coeficientul de finee al suprafeei liniei de plutire () reprezint raportul dintre
suprafaa liniei de plutire (S) i suprafaa unui dreptunghi cu laturile egale cu lungimea (L) i
limea (B) a navei:
B L
S
Coeficientul de finee al suprafeei cuplului maestru () este egal cu raportul dintre
suprafaa imers a cuplului maestru (Fcm) i suprafaa unui dreptunghi cu laturile egale cu
limea navei (B) i pescajul (T):
T B
Fcm
Coeficientul de finee al deplasamentului () este egal cu raportul dintre volumul
carenei (partea imers a navei) i volumul paralelipipedului rectangular construit cu
principalele dimensiuni ale navei (lungime, lime, pescaj):
T B L
V
Coeficientul de finee longitudinal () este egal cu raportul dintre volumul carenei
(V) i volumul cilindrului care ar avea ca baz suprafaa imers a cuplului maestru (Fcm), iar
ca nlime lungimea navei (L):
L Fcm
V
Coeficientul de finee vertical () este egal cu raportul dintre volumul carenei i
volumul cilindrului care are ca baz suprafaa liniei de plutire (S), iar ca nlime pescajul
navei (T):
T S
V
ntre coeficienii de finee exist urmtoarele relaii:
.
2.2. FLOTABILITATEA NAVEI
Flotabilitatea constituie principala calitate nautic a navei i reprezint proprietatea
navei de a pluti la un pescaj mediu determinat, avnd la bord ncrctura necesar
ndeplinirii misiunii de lupt.
Nava poate s pluteasc n semiimersiune, cnd o parte a ei se gsete n ap i alta
n aer.
Asupra navei aflate n stare de plutire acioneaz dou fore egale i opuse, care se
echilibreaz reciproc.
Prima for, greutatea navei (P), reprezint suma greutilor tuturor elementelor
componente ale navei. Fora p este o rezultant, ea are punctul de aplicaie n centrul de
greutate al navei(G) i este ndreptat pe vertical n jos. Sub influena acestei fore nava
tinde s intre n imersiune.
A doua for, fora de flotabilitate sau fora de mpingere (D), reprezint rezultanta
tuturor forelor de presiune ale apei ndreptate pe vertical n sus. Fora D este aplicat n
centrul de greutate al volumului imers al navei (C), care poart denumirea de centru de
caren.
Rezultanta forelor de presiune ale apei (D) este egal cu greutatea apei dislocate de
nav:
D= V,
n care:
D greutatea apei dislocate de nav n stare de plutire (se numete deplasament i
se exprim n tone);
greutatea specific a apei, n t/mc;
V volumul carenei (deplasament volumetric), in mc.
Pentru ca nava s pluteasc n echilibru este necesar s fie mplinite urmtoarele
dou condiii:
greutatea apei dislocate s fie egal cu greutatea navei nsi:
D= P= V
Aceast egalitate se numete, n teoria navei, ecuaia flotabilitii;
centrul de greutate al navei i centrul de caren s se gseasc pe
aceeai vertical.
Fig. 2.5.
A doua condiie de echilibru poate fi exprimat prin urmtoarele relaii ntre coordonatele
centrului de greutate (x
g
, y
g
, z
g
) i coordonatele centrului de caren (x
c
, y
c
, z
c
):
x
g
=x
c
;
y
g
=y
c
=0.
n ceea ce privete poziia pe vertical a celor dou puncte, de regul centrul de
greutate (G) trebuie s fie deasupra centrului de caren (C), deci:
z
g
>z
c
.
2.2.1. Deplasamentul navei
Numim deplasament, greutatea apei dislocate de o nav n stare de plutire. Dar cum
prima condiie a plutirii impune ca greutatea apei dislocate s fie egal cu nsi greutatea
navei, prin deplasament nelegem i greutatea navei.
n mod normal greutatea unei nave se compune din greutatea corpului, mainilor,
rezervelor, echipajului i a ncrcturii utile.
Navele militare sunt caracterizate numai prin deplasament. n mod practic deosebim
urmtoarele cinci feluri de deplasamente, corespunztoare situaiilor de ncrcare a navelor
respective:
deplasamentul navei goale deplasamentul navei gata construite, avnd la bord
toate instalaiile i armamentul, dar fr echipaj, muniie, combustibil, ap i alte materiale
consumabile;
deplasamentul standard deplasamentul unei nave gata construite, completat cu
cele necesare pentru aciune (ap n cldri, combustibil i ulei n tancurile de consum,
muniie), dar fr rezerve de combustibil, ap, ulei;
deplasamentul normal sau deplasamentul pe timpul probelor speciale greutatea
navei cu deplasament standard, plus greutatea rezervelor de combustibil, ap, ulei n
proporie de 50%;
deplasamentul total deplasamentul egal cu deplasamentul standard, plus rezervele
de combustibil, ap i ulei care asigur navei autonomia respectiv;
deplasamentul maxim deplasamentul navei egal cu deplasamentul total, plus o
cantitate suplimentar de rezerve (muniie, combustibil, ap) pe care poate s o ia la bord n
locurile amenajate n acest scop.
2.2.2. Modificarea pescajului navei la ambarcarea sau debarcarea
greutilor la bord
Pe nave trebuie s se menin i s se respecte cea mai riguroas disciplin n
privina primirii i repartizrii greutilor la bord. Evidena exact a ncrcturilor variabile la
bord are o importan deosebit pentru vitalitatea navei.
Pe timpul navigaiei apar deseori probleme legate de determinarea deplasamentului
navei sau a pescajului mediu, ca de exemplu:
- cu ct se modific pescajul navei dup ambarcarea sau consumul unei
anumite ncrcturi;
- ce ncrctur trebuie s fie ambarcat sau debarcat pentru ca
pescajul navei s creasc sau s scad cu o anumit valoare.
S presupunem c o nav cu deplasament D ambarc la bord o ncrctur de
greutate p, care reprezint 10-15% din deplasament i care nu provoac navei nici o
schimbare de band i asiet.
Dup primirea ncrcturii la bord, ecuaia flotabilitii devine:
V
1
=V+V
sau:
D
1
=D+p,
de unde:
p=V sau V=p/,
V fiind diferena volumului de caren al navei corespunztor ncrcturii primite p.
Dac presupunem c bordurile navei sunt perei drepi, atunci putem s considerm
c mrimea cu care se modific volumul de caren reprezint un cilindru a crui baz este
suprafaa liniei de plutire (S), iar nlimea diferena de pescaj (T).
Deci:
S T V
nlocuind valoarea lui V din formula anterioar obinem:
p
S T
de unde:
S
q
T
Pentru ca n practic s nu se recurg la calcule pentru fiecare modificare de pescaj s-
a introdus noiunea de numrul de tone pe centimetru de pescaj, noiune ce reprezint de
fapt valoarea ncrcturii, n tone, care schimb pescajul cu un centimetru.
Dac presupunem c nava respectiv i modific imersiunii cu un centimetru la
primirea unei ncrcturi (q), bineneles cu condiia s nu se modifice banda sau asieta,
atunci flotabilitii poate fi exprimat cu formula:
D+q=V+V
Urmnd acelai procedeu ca mai sus obinem:
S
q
T
dar T=1 cm=0,01 m i atunci:
q=00,1 S
Pe baza acestei formule se construiete un grafic, n funcie de numrul de tone pe
centimetrul de pescaj (fig. 2.6), care reprezint la o anumit scar curba de deplasament a
navei respective.
Din acest grafic se poate obine foarte simplu modificarea pescajului navei (T),
intrnd cu un singur argument deplasamentul rezultat la ambarcarea sau consumul unei
anumite ncrcturi (D
0
p).
Fig. 2.6
2.2.3. Modificarea pescajului navei n momentul trecerii de la ap de
mare la ap dulce i invers
Adesea porturile sunt dispuse la gurile marilor fluvii i uneori chiar n interior, pe fluviu.
n aceste porturi salinitatea apei (n consecin densitatea ei) va fi diferit de densitatea apei
de mare.
Din ecuaia flotabilitii D=V se observ c schimbarea densitii apei () atrage dup
sine o schimbare corespunztoare a volumului prii imerse a navei i, ca urmare, o
schimbare a pescajului.
S presupunem c o nav cu deplasament D a navigat mai nti n ap cu densitatea
1 i apoi, cu acelai deplasament, a trecut n ap cu densitatea 2. Pentru ambele cazuri
ecuaia flotabilitii va fi:
1 1
V D
sau
2 2
V D
De aici rezult c dac
1
este mai mare dect
2
, atunci
2
V
va fi mai mare dect
1
V
.
Notm creterea volumului prii imerse, corespunztoare modificrii densitii apei,
cu V , adic:
1 2
V V V
, atunci ecuaia flotabilitii poate fi exprimat:
V V V +
2 2 2 1 1
.
Dac scoatem valoarea lui V din aceast expresie obinem: 1
2
2 1
V V
.
Dup cum este cunoscut, densitatea apei de mare se ia n medie
3
025 , 1 m t
, iar
densitatea apei dulci de regul
3
1 m t
, ceea ce nseamn c modificarea volumului prii
imerse poate fi considerat mic i va fi exprimat prin relaia cunoscut:
S T V
1
2
2 1
V S T
.
Din aceast expresie calculm creterea pescajului:
S
V
T
1
2
2 1
.
ntruct folosirea n practic a acestei formule este incomod, deoarece volumul prii
imerse (V) i suprafaa liniei de plutire (S) se pot obine cu dificultate, este necesar s facem
un artificiu de calcul pentru a obine o formul n care intrm cu date cunoscute.
mprim ambele pri ale egalitii cu valoarea pescajului iniial (T) i obinem:
T S
V
T
T
1
2
2 1
.
Observm c raportul
ST
V
1
nu este altceva dect expresia coeficientului de finee
vertical
( )
cunoscut din datele de construcie ale navei.
nlocuind n expresie pe
obinem:
T T
2
2 1
.
Avnd toate datele cunoscute, coeficientul de finee vertical
, pescajul iniial (T) i
densitatea apei
1
i
2
, putem calcula foarte simplu valoarea cu care se modific pescajul
navei
( ) T
.
La trecerea din ap dulce n ap de mare pescajul navei scade, iar la trecerea din ap
de mare n ap dulce, pescajul navei crete.
2.3. STABILITATEA NAVEI
Stabilitatea constituie a doua calitate nautic, de mare importan, a oricrei nave.
Prin stabilitate nelegem capacitatea pe care o are o nav, scoas din echilibru
sub influena unor fore exterioare, de a reveni la poziia iniial n momentul cnd
forele de mai sus au ncetat.
De regul nava plutete pe chil dreapt, avnd planul diametral n poziie vertical.
Nava se poate nclina ntr-un bord sau altul sub influena vntului, aciunii valurilor, a forei
centrifuge ce ia natere pe timpul giraiei, precum i ca urmare a ambarcrii, debarcrii sau
dispunerii nesimetrice a greutilor la bord.
nclinrile navei pot avea loc n jurul axului longitudinal Ox sau n jurul axului
transversal Oy. Aceste dou axe se gsesc n planul liniei de plutire.
nclinarea navei n jurul axului longitudinal Ox se numete band sau nclinare
transversal. Unghiul care caracterizeaz aceast nclinare se numete unghi de band (sau
de nclinare transversal) i se noteaz cu .
nclinarea navei n jurul axului transversal Oy se numete nclinare longitudinal sau
diferen de asiet. Unghiul care caracterizeaz aceast nclinare se numete unghi de
asiet (sau de nclinare longitudinal) i se noteaz cu .
Calitatea unei nave bandate de a reveni n poziie iniial se numete stabilitate
transversal, iar calitatea unei nave de a reveni n asiet dreapt se numete stabilitate
longitudinal.
2.3.1. Elemente de stabilitate
Pentru nelegerea sensului fizic al stabilitii presupunem urmtoarele: o nav avea n
situaia iniial linia de plutire W
0
L
0
; sub influena unei fore exterioare (vnt, val) nava se
nclin transversal cu un unghi , ceea ce corespunde liniei de plutire W
1
L
1
.
Fig. 2.7
Cele dou linii de plutire W
0
L
0
i W
1
L
1
se numesc linii de ape izocarene deoarece
deplasamentul navei a rmas acelai (volumul prii care a intrat n ap este egal cu volumul
prii care a ieit din ap).
n momentul nclinrii, greutatea navei nu se schimb cu nimic i deci centrul de
greutate G rmne pe loc. n schimb se modific forma prii imerse a corpului navei, ceea
ce face ca centrul de caren C, ca centrul de greutate al volumului imers, s se mute din
planul diametral nspre bordul nclinat, ntr-o poziie nou C
1
. n aceast nou situaie fora de
flotabilitate D aplicat n C
1
va aciona pe vertical n sus. Ea rmne egal ca valoare cu
fora greutii navei P care va fi aplicat n punctul G i va aciona pe vertical n jos. ntruct
cele dou fore egale i de sens contrar nu mai sunt pe aceeai vertical, se formeaz un
cuplu de fore, avnd braul cuplului GK.
Momentul acestui cuplu M se opune momentului de nclinare i tinde s readuc nava
n poziia avut nainte de a fi bandat:
M
0
= GK D
Acest moment se numete moment de redresare.
Din figura 2.7 se observ c linia de aciune a forei D intersecteaz planul diametral al
navei n punctul M, care se numete metacentru, i constituie centrul arcului de cerc pe care
se deplaseaz centrul de caren (C) la unghiuri mici de nclinare ale navei. n cazul
nclinrilor transversale punctul M se numete metacentru transversal, iar n cazul
nclinrilor longitudinale se numete metacentru longitudinal (fig. 2.8).
Distana msurat de la metacentrul M la centrul de greutate al navei G se numete
nlime metacentric i se noteaz cu h. nlimea metacentric poate fi i ea transversal
(h) i longitudinal (H).
Distana msurat de la centrul de caren C la metacentrul M se numete raz
metacentric. n funcie de axa n jurul creia se produce nclinarea navei, aceste dou raze
primesc denumirile de: raz metacentric transversal (r) i raz metacentric
longitudinal (R).
Fig. 2.8
n teoria navei, noiunea de stabilitate mbrac mai multe aspecte, i anume:
- stabilitate iniial sau stabilitatea navei la nclinri mici, atunci cnd poziia
metacentrului poate fi considerat fix, indiferent de unghiul de nclinare;
- stabilitatea navei la nclinri mari.
n funcie de natura forelor care acioneaz asupra navei, stabilitatea
poate fi static sau dinamic.
Stabilitate static se numete stabilitatea navei caracterizat prin mrimea
momentului de redresare, care tinde s readuc nava n poziia iniial de echilibru.
Stabilitate dinamic se numete stabilitatea caracterizat prin lucrul mecanic al
momentului de redresare.
2.3.2. Condiia stabilitii navei
n cazul nclinrii navei, sub aciunea unei fore exterioare, centrul de caren al navei
se va deplasa n sensul nclinrii. Ca urmare, el nu se va mai afla pe aceeai vertical cu
centrul de greutate, iar cele dou fore P i D, acionnd din poziiile actuale, vor da natere
cuplului, al crui moment se numete moment de redresare.
Dac acest moment tinde s readuc nava n poziia de echilibru, el se consider
pozitiv, iar nava stabil, n caz contrar, momentul se consider negativ i nava instabil.
n cazul nclinrilor transversale ale navei, n funcie de poziia reciproc a
metacentrului transversal i a centrului de greutate al navei, deosebim trei situaii de
echilibru, i anume:
- nava stabil, ntotdeauna cnd metacentrul transversal se afl dispus
deasupra centrului de greutate al navei (secvena a din fig. 2.9);
- nava instabil, ntotdeauna cnd metacentrul transversal se va afla
sub centrul de greutate al navei (secvena b din fig. 2.9);
- nava n echilibru indiferent i deci nestabil, atunci cnd metacentrul
transversal coincide cu poziia centrului de greutate al navei (secvena c din fig. 2.9).
Fig. 2.9
2.3.3. Stabilitatea navei la nclinri mici
Stabilitatea navei la unghiuri de nclinare mici se mai numete i stabilitate iniial.
Presupunem c nava s-a nclinat sub aciunea unei fore exterioare cu un unghi
foarte mic.
Liniile de plutire ale navei, att cea iniial (W
0
L
0
) ct i cea actual (W
1
L
1
), sunt linii de
ap izocarene. Conform teoriei lui Euler, dou linii de ap izocarene care se ntretaie sub
un unghi infinit mic se intersecteaz dup o linie dreapt care trece prin centrul de
greutate (f) al suprafeelor liniilor de plutire.
n ce privete deplasarea centrului de caren, n cazul nclinrii navei la unghiuri infinit
mici, acesta va descrie o curb. Tangenta dus n orice punct al acestei curbe este
ntotdeauna paralel cu linia de plutire actual, corespunztoare punctului respectiv. Ca
urmare, tangenta dus n punctul C este paralel cu linia de plutire W
0
L
0
, iar tangenta dus n
punctul C
1
va fi paralel cu linia de plutire W
1
L
1
.
Normala pe tangent n punctul C i normala pe tangenta ridicat n punctul C
1
se vor
intersecta n punctul M, denumit, aa cum am vzut metacentru.
Segmentele CM i C
1
M sunt egale ntre ele i constituie raze ale arcului de cerc pe
care-l descrie centrul de caren n deplasarea sa la nclinri mici. De fapt distana dintre
metacentru i centrul de caren se numete raz metacentric.
Formule metacentrice de stabilitate
Raza metacentric transversal (r) i raza metacentric longitudinal (R) se
calculeaz n teoria navei cu urmtoarele formule:
r=
V
Ix
i R=
V
Iy
.
unde I
x
, I
y
sunt momentele de inerie ale suprafeei liniei de plutire actuale fa de axa
longitudinal central (Ox) i respectiv fa de axa transversal (Oy), iar V volumul carenei.
nlocuind valoarea volumului carenei V=LBT n formulele razelor metacentrice obinem
expresia:
T
B
V
Ix
r
2
12
1
;
T
L
V
Iy
R
2
12
1
,
iar din aceste dou expresii putem s aflm raportul celor dou raze metacentrice:
2
,
_
B
L
r
R
care este egal cu ptratul raportului dintre lungime i lime.
nlimea metacentric transversal (h) i nlimea metacentric longitudinal
(H) pot fi exprimate n funcie de razele metacentrice (r, R) i nlimea centrului de greutate
G deasupra centrului de caren C, care n teoria navei se noteaz cu a (a=z
g
-z
c
), dup cum
urmeaz:
h=r-a sau h=r+ z
c
-z
g
H=R-a sau H=R+ z
c
-z
g
n care z
g
i z
c
reprezint nlimea centrului de greutate i a centrului de caren deasupra
chilei (linia de baz).
Momentul de redresare, M= GK D , poate fi i el exprimat n funcie de unghiurile de
nclinare transversal () i nclinare longitudinal ().
Din triunghiul dreptunghic GMK se observ c braul cuplului stabilitii statice GK
(care n teoria navei se noteaz cu l) poate fi calculat cu formulele:
sin 1 h
i respectiv
sin 1 H
ca urmare, formula momentului de redresare n cazul unghiurilor mici de nclinare ale navei,
n raport cu axa x i axa z, devine:
sin h D Mx
pentru nclinri transversale i:
sin H D My
pentru nclinri longitudinale.
Aceste dou formule se numesc formule metacentrice de stabilitate transversal i
respectiv longitudinal. Ele constituie relaiile de baz n teoria stabilitii navei n cazul
unghiurilor mici de nclinare.
Din analiza formulelor metacentrice de stabilitate transversal i longitudinal rezult
c, cu ct vor fi mai mari nlimile metacentrice h i H cu att mai mari vor fi momentele de
redresare Mx i My i n consecin nava va fi mai stabil. De aceea nlimile metacentrice h
i H caracterizeaz stabilitatea navei la unghiuri de nclinare mici i constituie msur a
stabilitii iniiale.
2.4. VARIAIA ASIETEI I STABILITII NAVEI
LA DEPLASAREA, PRIMIREA SAU CONSUMUL GREUTILOR
Deplasarea greutilor la bord, precum i ambarcarea sau debarcarea (consumul)
anumitor ncrcturi provoac schimbri de band i asiet, concomitent cu schimbarea
stabilitii navei.
n cazul deplasrii greutilor la bord, deplasamentul navei rmne neschimbat, iar n
cazul ambarcrii sau consumului anumitor ncrcturi, deplasamentul se modific.
2.4.1. Modificarea stabilitii iniiale i asietei
n cazul deplasrii greutilor la bord
Orice deplasare de greuti la bordul navei poate fi reprezentat sub forma a trei
deplasri concomitente, corespunztor celor trei axe de coordonate, astfel: deplasri pe
vertical (z), n planul transversal (y) i n planul longitudinal (x).
Deplasarea greutilor pe vertical
Presupunem c nava se afl pe chil dreapt i c greutatea p a fost deplasat pe
vertical din poziia A n poziia B. Notm coordonatele centrului de greutate al ncrcturii p
pentru poziia iniial (A) cu z
1
i pentru poziia final (B) cu z
2
.
Ca urmare a deplasrii greutii p pe distana 1
z
= z
2
z
1
se va modifica poziia
centrului de greutate al navei. El se va muta din poziia iniial G n poziia final G
1
, urmnd
acelai sens cu deplasarea greutii p.
Fig 2.10
n acest timp centrul de caren al navei rmne n poziia iniial, ntruct nu a survenit
nici o schimbare n deplasamentul navei.
Centrul de greutate G
1
i centrul de caren C fiind pe aceeai vertical, nu vor avea
loc modificri de echilibru (nava rmne n asiet dreapt), ci se va modifica numai
stabilitatea iniial a navei (nlimile metacentrice).
Aceasta nseamn c deplasarea greutilor pe vertical poate provoca schimbri
nsemnate ale stabilitii transversale (h poate schimba fundamental valoarea nlimii
metacentrice transversale), n schimb se poate socoti c aceste deplasri nu au nici o
influen practic asupra stabilitii longitudinale (H este foarte mic n comparaie cu H).
n concluzie, prin deplasarea unei greuti de jos n sus (z
2
>y
1
) stabilitatea navei se
micoreaz, iar prin deplasarea greutii de sus n jos (z
2
<z
1
) stabilitatea navei se mrete.
Deplasarea greutilor pe orizontal n plan transversal
n mod similar, deplasm greutatea p pe orizontal n plan transversal din poziia A (cu
ordonata y
1
) n poziia B (cu ordonata y
2
), pe o distan AB=1y=y
2
-y
1
.
Aceast deplasare provoac o nclinare a navei cu unghiul (). Momentul de nclinare
provocat de deplasarea greutii se calculeaz cu formula:
( ) cos
1 2
y y p M
i
Sub influena momentului de nclinare (M
i
) nava se va banda pn cnd momentul de
redresare (M
r
) care ia natere echilibreaz momentul de nclinare, adic M
r
=M
i
, de unde
obinem egalitatea:
( ) cos sin
1 2
y y p h D
Rezolvnd aceast ecuaie in funcie de aflm valoarea unghiului de nclinare
provocat de deplasarea greutii n plan transversal:
( )
h D
y y p
tg
1 2
Not: n funcie de direcia deplasrii greutii, diferena (Y2-Y1)) poate avea valori negative sau pozitive.
Semnul plus se consider nclinare la tribord, iar semnul minus, nclinare la babord.
Deplasarea greutilor pe orizontal n plan longitudinal
n aceleai condiii ca i n cazurile anterioare, deplasm greutatea p de-a lungul navei
din A n B pe o distan L
x
=x
2
-x
1
.
n mod similar, deplasarea greutii provoac o modificare de asiet corespunztoare
momentului de nclinare ( ) cos
1 2
x x p Mi care va fi echilibrat de momentul de redresare
longitudinal
sin H D Mx
. De unde se obine:
( )
H D
x x p
tg
1 2
.
n practic intereseaz mai puin valoarea unghiului de nclinare longitudinal i se
lucreaz de regul cu diferena de pescaj survenit la prova i la pupa, care se calculeaz cu
formulele:
tg x
L
T
tg x
L
T
f pp
f pv
,
_
,
_
2
2
n final pescajul navei la prova i la pupa se calculeaz cu formulele:
tg x
L
T T
tg x
L
T T
f pp
f pv
,
_
,
_
+
2
2
0
0
x
f
- abscisa centrului de greutate al liniei de plutire;
T
0
- pescajul mediu la cuplul maestru cu abscisa xf;
L - lungimea navei.
2.4.2. Modificarea stabilitii i asietei n cazul ambarcrii sau debarcrii
(consumului) anumitor greuti (ncrcturi)
n general orice ambarcare sau debarcare de greuti la bord provoac modificri ale
pescajului i stabilitii navei.
Considerm c se ambarc o greutate p, care se dispune la bord ntr-un punct de
coordonate x, y, z.
S presupunem c sunt asigurate condiiile de echilibru pentru ca nava s rmn pe
chil dreapt i c prin ambarcarea greutii p se modific numai poziiile centrului de
greutate al navei (G) i centrului de caren (C).
Fig. 2.13
n acest caz, pentru determinarea modificrii nlimilor metacentrice h i H trebuie
calculate noile valori ale ordonatei (z
g
) a centrului de greutate al navei, ordonatei (z
c
) centrului
de caren i razelor metacentrice r i R.
Modificarea pescajului mediu:
S
p
T
,
unde:
p greutatea n tone a ncrcturii primite la bord;
S suprafaa liniei de plutire actuale;
- greutatea specific a apei.
Modificrile ordonatelor centrului de greutate (z
g1
) i a centrului de caren (z
c1
):
( )
,
_
+
+
+
+
+
c c c
g g g
Z
T
T
p D
p
z z
z z
p D
p
z z
2
;
1
1
unde:
D deplasamentul iniial al navei;
g
z
- ordonata centrului de greutate pn la primirea ncrcturii p;
z ordonata centrului de greutate al ncrcturii p;
c
z
- ordonata centrului de caren pn la primirea ncrcturii;
T pescajul navei pe linia de plutire iniial
( )
0 0
L W
;
T - diferena de pescaj provocat de ambarcarea ncrcturii p.
Modificrile razelor metacentrice (r
1
i R
1
):
0 0 1
0 0 1
0 0 1
;
;
R
p D
p
R R
r
p D
p
r r
r
p D
p
r r r
+
+
+
unde:
R
0
i r
0
razele metacentrice iniiale;
r - modificarea razei metacentrice.
Modificrile nlimilor metacentrice (h
1
i H
1
):
,
_
+
+
+
,
_
+
+
+
,
_
+
+
z H
T
T
p D
p
H H
z h
T
T
p D
p
h h
z h
T
T
p D
p
h
0 0 1
0 0 1
0
2
;
2
;
2
unde:
]
1
h
i
1
H
- nlimile metacentrice dup primirea ncrcturii la bord;
1
h
i
1
H
- nlimile metacentrice iniiale;
h - modificarea nlimii metacentrice.
Not: n cazul debarcrii sau consumului ncrcturii (p) noua nlime metacentric
va fi h
1
=h
0
-h, deci:
.
2
0 0 1
1
]
1
+
+
z h
T
T
p D
p
h h
Presupunem c ncrctura p se dispune la bord ntr-un punct oarecare de coordonate
(x,y,z) i nu se respect condiia de echilibru, adic centrul de greutate al ncrcturii p nu se
va afla pe aceeai vertical cu centrul de greutate al suprafeei liniei de plutire (f). Dac
greutatea p se va afla la o distan y fa de planul diametral, nava va suferi o nclinare
transversal. n acest caz valoarea unghiului de nclinare se calculeaz cu formula:
( )
.
1
h p D
y p
tg
+
n cazul c greutatea p va fi dispus de-a lungul navei la o distan (x-x
f
), atunci
valoarea unghiului de nclinare se calculeaz cu formula:
( )
( )
,
1
H p D
x x p
tg
f
+
unde:
f
x
- abscisa centrului de greutate al suprafeei liniei de plutire actuale.
Modificarea pescajului navei la prova (T
pv
) i la pupa (T
pp
)
Dac greutatea p se ambarc spre prova navei, adic x > 0 i x
f
> 0, modificarea
pescajului se calculeaz cu formulele:
( )
( )
( )
( )
,
2 2
;
2 2
1
1
,
_
+
+
,
_
,
_
+
,
_
+
f
f
f pp
f
f
f pv
x
L
H p D
x x p
T tg x
L
T T
x
L
H p D
x x p
T tg x
L
T T
unde:
T - modificarea pescajului mediu;
L lungimea navei.
2.5 INFLUENA NCRCTURILOR NEAMARATE
I A NCRCTURILOR LICHIDE ASUPRA STABILITII NAVEI
ncrcturile suspendate, care i schimb poziia fa de corpul navei, odat cu
nclinarea acesteia, influeneaz asupra stabilitii.
S presupunem c la bord exist un obiect suspendat cu greutatea p, care este fixat
n punctul A i are centrul de greutate n punctul B. Dac acest obiect ar fi amarat i centrul
su de greutate nu i-ar schimba poziia la nclinrile navei, el nu ar avea nici o influen
asupra stabilitii navei. Dac obiectul nu este amarat, la nclinrile navei se va comporta ca
un pendul, centrul su de greutate deplasndu-se n sensul nclinrii navei din punctul B n
punctul B
1
.
Figura 2.15
Aceasta va provoca apariia unui moment de nclinare suplimentar, care poate fi
exprimat prin formula: Mi=p* l* sin , unde l este nlimea punctului fix A fa de centrul de
greutate B.
Acest moment suplimentar va aciona in acelai sens ca i momentul de nclinare
determinat de o fora exterioar i deci va accentua nclinarea navei.
Ca urmare momentul de redresare va deveni:
sin sin l p h D M
x sau
. sin
,
_
D
l p
h D M
x
De unde rezult c apariia acelui moment suplimentar de nclinare face ca nlimea
metacentric s se micoreze cu valoarea :
.
D
l p
h
n concluzie un obiect suspendat neamarat care penduleaz odat cu nclinarea navei
are aceeai influen asupra stabilitii nave ca i deplasarea unei greuti pe vertical de jos
n sus.
Reamintim c n acest caz, modificarea nlimii metacentrice era
( )
D
lz p
D
z z p
h
1 2
deci aceeai.
De asemenea n c r c t u r i l e l i c h i d e cu suprafa liber care nu umplu
complet compartimentele destinate lor influeneaz stabilitatea navei.
S presupunem c la bord exist un tanc umplut pe jumtate cu lichidul respectiv
(ap, combustibil).
Cnd nava navig pe chil dreapt suprafaa lichidului va fi paralel cu planul liniei de
plutire iniiale.
n cazul cnd nava se bandeaz lichidul se deplaseaz liber n bordul n bordul
nclinrii , astfel c suprafaa sa rmne orizontal deci paralela cu planul noii linii de plutire
iar centrul de greutate al lichidului se va deplasa din punctul B in B
1
.
Aceast deplasare a centrului de greutate a lichidului (a crei greutate o notm cu p)
va provoca un moment suplimentar de nclinare M
i
=p*lsin unde l este distana AB=raza
curbei descrise de centrul de greutate al lichidului n traiectoria sa BB
1
.
Figura 2.16
Valoarea mrimii l se calculeaz cu formula:
l=
v
ix
,
unde :
ix- momentul de inerie al suprafeei liber a lichidului fa de axa longitudinal ox
care trece prin centrul de greutate al acestei
v- volumul lichidului din tanc
tiind c ntre greutatea lichidului p i volumul su exist relaia:
v p
1
(unde
1
este greutatea specific a lichidului din tanc) i nlocuind noile valori ale lui p
i l n formula momentului suplimentar de nclinare obinem :
sin
1
x
i Mi
.
n consecin momentul de redresare al navei devine :
sin sin
1
x x
i h D M
sau
sin
1
,
_
v
i
h D M
x
x
De unde rezult c nlimea metacentric a navei se modific cu valoarea h:
.
1
v
i
h
x
2.6 STABILITATEA NAVEI EUATE
n cazul punerii pe uscat nava nceteaz de a mai fi un corp ce plutete liber. Pe
lng cele 2 fore P i D care acioneaz n mod normal asupra navei din momentul punerii
pe uscat apare o a 3 a for R denumit for de reacie a fundului .
Mrimea forei de reacie i coordonatele punctului de aplicaie al acesteia pot fi
determinate pe baza modificrilor survenite n pescajul i asieta navei.
Mrimea forei de reacie poate fi considerat echivalent cu greutatea unei
ncrcturi care a fost scoas de la bord i se calculeaz cu formula:
,
2
pp pv
T T
S T S R
+
Unde:
S- suprafaa liniei de plutire iniiale
T- modificarea pescajului mediu
DTpv i DTpp- modificrile pescajului la prova i pupa care se msoar dup
punerea navei pe uscat
Noile valori ale nlimilor metacentrice se calculeaz cu formulele cunoscute din
paragraful 2.4.2.
Pentru folosirea formulelor amintite este necesar s se considere c p= - R, Z=0 i T
are semnul minus.
n acest caz noua nlime metacentric va fi:
,
2
1
,
_
h
T
T
R D
R
h h
unde T este pescajul navei corespunztor liniei de plutire iniiale.
Dup cum se observ din aceast formul, stabilitatea navei se poate micora
simitor n cazul punerii navei pe uscat.
Coordonatele punctului (A) de aplicaie a forei de reacie (punctul de pe corpul navei
care s+a aezat pe fund) pot fi calculate cu formulele:
f
x tg H
R
R D
x
tg h
R
R D
y
+
1
1
unde x
f
este abscisa centrului de greutate al liniei de plutire iniiale. Unghiul se
calculeaz astfel:
L
T T
tg
pp pv
n care L este lungimea navei.
2.7. STABILITATEA NAVEI LA UNGHIURI MARI DE NCLINARE
Pentru a studia stabilitatea navei la unghiuri mici de nclinare am presupus c
metacentrul ocup o poziie constant indiferent de nclinarea navei. Ca urmare, s+a obinut
formula momentului de redresare
sin h D Mx
n cazul nclinrii navei cu unghiuri mari , metacentrul va ocupa o poziie variabila , n
funcie de valoarea unghiului de nclinare al navei .
Momentul de redresare al navei n cazul nclinrilor cu unghiuri mai mari se
calculeaz cu formula:
, Dl l P Mx
n care: P=D- greutatea navei (deplasamentul);
l- braul de stabilitate static; l=f () este funcie de unghiul de nclinare .
Problema principal a studiului stabilitii navei la nclinri mari o constituie
determinarea braului de stabilitate static.
n cazul nclinrii navei cu unghiuri mici, braul de stabilitate se calculeaz cu formula
sin h l
Pentru determinarea braului de stabilitate n cazul nclinrii navei cu unghiuri mari
este suficient s cunoatem poziia centrului de caren (C) sau a metacentrului (M)
corespunztor unghiului de nclinare (), ntruct tim c poziia centrului de greutate a navei
(G) rmne neschimbat indiferent de nclinare, iar linia de aciune a forei de flotabilitate (D)
trece ntotdeauna prin punctele C i M, perpendicular pe linia de plutire actual.
Determinarea braului de stabilitate (l) n cazul unghiurilor mari de nclinare se poate
efectua prin diferite metode: analitice, grafice i grafoanalitice. Nu ne vom ocupa aici de
aceste metode de calcul, ci vom prezenta doar expresia analitic a braului de stabilitate n
funcie de coordonatele centrului de caren i unghiurile de nclinare :
( ) sin sin cos
1 1
a Z Z y l
c c c
+
unde:
y
c1
i Z
c1
coordonatele centrului de caren n poziia nclinat a navei<
Z
c
- ordonata centrului de caren cnd nava se afl n poziie dreapt;
a - nlimea centrului de greutate deasupra centrului de caren n poziie
dreapt.
n mod analog, cu noiunile stabilitate de form i stabilitate de greutate, ntlnite n
cazul nclinrilor navei cu unghiuri mici, putem s folosim aceleai noiuni i n cazul nclinrii
navei cu unghiuri mari.
i n acest caz l = l
f
+ l
g
, iar braul de stabilitate de form i braul de stabilitate de
greutate se calculeaz cu formula:
( )
sin
sin cos
1 1
a l
Z Z y l
g
c c c f
+
Din aceste formule rezult c braul de stabilitate de form (l
f
) depinde numai de
poziia centrului de caren i nu are nici o legtur cu dispunerea greutilor la bord. n
schimb, braul de stabilitate de greutate depinde direct de a (nlimea centrului de greutate
deasupra centrului de caren), deci de dispunerea pe vertical a greutilor la bord.
2.7.1. Stabilitatea dinamic
n studiul stabilitii navei noi am presupus c nclinarea navei se produce n mod
static. De fapt pot exista situaii cnd nava se nclin pe neateptate (brusc) sub influena
unor fore exterioare, cum ar fi momentul de nclinare provocat de val, de o rafal puternic,
o explozie etc.
n cazul stabilitii statice, momentul de nclinare aciona n mod progresiv asupra
navei i, ca urmare, nava nceta s se mai ncline imediat ce momentul de redresare era egal
cu momentul de nclinare. Dac ns asupra navei acioneaz un moment de nclinare care
de la nceputul aciunii sale are o mrime constant, atunci nava capt o vitez unghiular
pe timpul nclinrii, vitez care va crete att timp ct momentul de nclinare va fi mai mare
dect momentul de redresare. Cnd momentul de redresare va fi egal cu momentul de
nclinare, nava avnd o vitez unghiular oarecare nu va rmne n poziie de echilibru, ci va
continua s se ncline. Dar, mai departe, momentul de redresare va fi mai mare dect
momentul de nclinare, fapt care face ca viteza unghiular s scad i s ajung egal cu
zero, n clipa cnd lucrul mecanic al momentului de redresare va fi egal cu lucrul mecanic al
momentului de nclinare. n aceast clip nava se va opri i va reveni n poziie de echilibru,
din care va fi scoas din nou, executnd n acest mod o serie de oscilaii.
Problema fundamental a stabilitii dinamice const n determinarea unghiului
maxim de nclinare () pn la care nava se va nclina sub aciunea cuplului aplicat n mod
brusc.
2.7.2. Diagrame de stabilitate
Curba prin care se reprezint grafic variaia braului stabilitii (l) la diferite unghiuri de
nclinare () se numete diagram de stabilitate. Reprezentarea grafic a braului stabilitii
statice l = f () se numete diagrama stabilitii statice, iar a braului stabilitii dinamice l
d
=
, diagrama stabilitii dinamice.
Diagrama stabilitii statice se obine ntr-un sistem de axe rectangulare
nregistrnd pe axa absciselor unghiurile de nclinare (), iar pe axa ordonatelor braul
cuplului stabilitii statice (l). Uneori pe axa ordonatelor se msoar momentul de redresare
(M
x
= Dl). Din aceast cauz se obinuiete ca pe axa ordonatelor s se traseze dou scri:
una pentru braul de stabilitate (n metri) i alta pentru momentul de redresare (n tone-metri)
(fig. 2.18).
Dac asupra navei acioneaz un moment de nclinare constant (M
i
), acesta poate fi
reprezentat printr-o linie orizontal care intersecteaz diagrama stabilitii n dou puncte N
1
i N
2
, corespunztor unghiurilor de nclinare
1
i
2
. La aceste unghiuri de nclinare,
momentele cuplurilor de redresare vor fi egale cu momentele cuplurilor de nclinare i nava
se va afla n poziie de echilibru.
Dar trebuie remarcat c la nclinarea
1
nava se afl n poziia de echilibru stabil, iar
la nclinarea
2
nava se afl n poziia de echilibru nestabil. Pentru a explica acest lucru,
presupunem c la nclinarea navei cu unghiul
1
s-a obinut un moment adiional care d o
nclinare
3
. Imediat ce momentul adiional nceteaz, momentul de redresare va fi mai
mare dect momentul de nclinare, iar nava tinde s revin la poziia sa de echilibru cu
unghiul de nclinare
1
. n schimb, dac nava va fi nclinat cu un unghi mai mare dect
2
,
momentul de redresare va fi mai mic dect momentul de nclinare i nava nu va mai reveni la
poziia de echilibru
2
, ci se va rsturna.
n cazul cnd se schimb valoarea momentului de nclinare, linia orizontal
corespunztoare noului moment se va schimba mai sus sau mai jos, dar ntotdeauna va
intersecta diagrama stabilitii n dou puncte: unul pe ramura ascendent corespunztor
poziiei de echilibru stabil i altul, pe ramura descendent, corespunztor poziiei de echilibru
nestabil. Momentul de nclinare maxim pe care l poate suporta nava la nclinri statice
tangenteaz diagrama stabilitii n punctul A, care corespunde maximului diagramei.
Dac nava primete o nclinare la care braul cuplului de redresare este negativ (dup
punctul B), atunci nava se va rsturna chiar dac va lipsi cuplul de nclinare.
n concluzie, diagrama stabilitii statice poate fi mprit n trei pri:
- ramura ascendent OA, care corespunde nclinrilor n poziia de echilibru stabil;
- ramura descendent AB, care corespunde nclinrilor navei n poziiile de echilibru
nestabil,
dei valorile braului de stabilitate sunt pozitive;
- ramura negativ, dup punctul B, n care momentul de redresare are valori
negative.
Principalele proprieti ale diagramei de stabilitate static sunt urmtoarele:
- ordonata maximului curbei de stabilitate determin valoarea momentului de
nclinare maxim
pe care l poate suporta nava la nclinri statice;
- abscisa maximului curbei de stabilitate determin valoarea momentului maxim de
nclinare
static ( max
);
- unghiul de nclinare 0
la care nava i pierde stabilitatea se numete unghi de
stabilitate
nul sau unghi de rsturnare i corespunde punctului B n care curba de stabilitate
intersecteaz axa absciselor.
Deci unghiul
max
poate fi interpretat ca acel unghi maxim pn la care nava poate fi
nclinat de ctre un moment de nclinare care acioneaz permanent i constant. Iar unghiul
de rsturnare
0
poate fi considerat ca unghiul maxim pn la care nava poate fi nclinat
de ctre un moment de nclinare temporar, astfel c la ncetarea aciunii lui nava lsat liber
revine la poziia iniial de echilibru.
Diagrama stabilitii dinamice
Curba prin care se reprezint grafic lucrul mecanic al momentului de redresare sau
braul stabilitii dinamice (la alt scar) n funcie de unghiul de nclinare se numete
diagrama stabilitii dinamice. Este important de remarcat c curba braului stabilitii
dinamice reprezint integrala funciei braului stabilitii statice:
0
. d l l
d
i ca urmare diagrama stabilitii dinamice va avea aceleai proprieti ca orice curb
integral:
- braul stabilitii dinamice crete atta timp ct braul stabilitii statice are valori
pozitive;
- maximul curbei braului de stabilitate dinamic corespunde unghiului de nclinare la
care
braul stabilitii statice este egal cu zero, deci corespunde unghiului de rsturnare;
- punctul de inflexiune al curbei braului de stabilitate dinamic corespunde
unghiului de
nclinare la care curba stabilitii statice este maxim;
- axa absciselor este tangent la curba braului de stabilitate dinamic n origine.
Aceste proprieti se pot observa clar n figura 2.19, n care sunt reprezentate att
diagrama stabilitii statice (I), ct i diagrama stabilitii dinamice (II).
Fig. 2.19
2.7.3. Folosirea practic a diagramelor de stabilitate static i dinamic
Diagramele de stabilitate static i dinamic se folosesc n practic la rezolvarea
urmtoarelor dou probleme importante pentru navigaia n siguran i vitalitatea navei:
- determinarea unghiului cu care se nclin o nav care, navignd pe chil dreapt,
este
supus instantaneu unui moment de nclinare constant;
- determinarea valorii momentului de nclinare constant, care aplicat instantaneu
poate s
rstoarne nava respectiv.
Suprafaa BCD, dispus deasupra liniei AD, se numete rezerv de stabilitate
dinamic a navei pentru unghiul de nclinare dat d
.
Momentul maxim de nclinare este momentul pentru care suprafaa OAB este egal cu
suprafaa BCD, deci cu rezerva de stabilitate dinamic. n cazul cnd un moment de nclinare
aplicat instantaneu este mai mare dect momentul maxim de nclinare, atunci nava se
rstoarn
Determinarea momentului de rsturnare
n cazul cnd o nav este supus unui cuplu de nclinare constant, putem determina
cu ajutorul diagramei de stabilitate static dac nava se rstoarn sau nu.
Pentru aceasta, lum pe scara momentelor mrimea momentului de nclinare
i
M
i
din punctul A ducem o paralel la axa absciselor.
Dac suprafaa BCD, delimitat de curba stabilitii statice i linia AD, este mai mare
dect suprafaa OAB, atunci nava nu se rstoarn.
Fig. 2.21
Suprafaa BCD, dispus deasupra liniei AD, se numete rezerv de stabilitate
dinamic a navei pentru unghiul de nclinare dat
d
.
Momentul maxim de nclinare este momentul pentru care suprafaa OAB este egal
cu suprafaa BCD, deci cu rezerva de stabilitate dinamic. n cazul cnd un moment de
nclinare aplicat instantaneu este mai mare dect momentul maxim de nclinare, atunci nava
se rstoarn.
Determinarea unghiului de nclinare i a momentului maxim de nclinare
cu diagrama stabilitii dinamice
Pentru a afla unghiul de nclinare dinamic, pe diagrama de stabilitate dinamic trasm
curba lucrului mecanic al momentului de nclinare constant. Aceasta va fi o linie dreapt care
unete originea axelor de coordonate (punctul 0) cu extremitatea ordonatei momentului de
nclinare, msurat la unghiul de
0
3
57
.
Intersecia acestei linii OA cu diagrama de stabilitate dinamic determin unghiul
cutat d
pn la care nava se nclin, sub aciunea momentului i
M
aplicat brusc.
Pentru a determina mrimea momentului maxim de nclinare
( )
max
M
, care aplicat
brusc poate s rstoarne nava, trasm din originea axelor de coordonate o tangent la
diagrama de stabilitate dinamic (OK). n acest caz, ordonata
max
M
, cu abscisa
0
3
57
, va da
mrimea momentului cutat, iar abscisa punctului de tangen, valoarea maxim a unghiului
de nclinare dinamic.
n concluzie, orice dreapt dus din origine deasupra tangentei la curba de stabilitate
dinamic va reprezenta lucrul mecanic al unui moment de nclinare mai mare dect
momentul maxim de nclinare (momentul de rsturnare) i deci, sub influena unui astfel de
moment, nava se va rsturna. Orice linie dreapt dus din origine sub tangenta la curba de
stabilitate dinamic va reprezenta un moment de nclinare a crui aciune instantanee nu
prezint pericol pentru nava respectiv.
2.8. NESCUFUNDABILITATEA NAVEI
Nescufundabilitate se numete capacitatea navei de a pluti i de a-i menine
stabilitatea, posibilitatea de a se deplasa i guverna n cazul cnd unul sau mai multe
compartimente au fost inundate cu ap, ca urmare a avariilor la corp.
Obiectul de studiu al nescufundrii navei rezult din nsi definiia noiunii i const
n studierea flotabilitii i stabilitii navei avariate.
Pentru nescufundarea navei au o importan vital msurile care se iau la bord dup
producerea avariei, adic modul cum lupt echipajul pentru salvarea navei. i bineneles c
un echipaj instruit, care cunoate principiile teoretice ale nescufundrii, va aciona corect, n
timp ce un echipaj neinstruit, incapabil de a nelege fenomenul ce se produce, va aciona la
ntmplare.
n consecin, teoria nescufundrii are dou laturi: prima se refer la studiul
flotabilitii i stabilitii navei avariate i a doua latur, la elaborarea metodelor de refacere i
meninere a flotabilitii i stabilitii navei care a fost avariat.
Lupta pentru nescufundarea navei reprezint totalitatea aciunilor pe care le
ndeplinete echipajul navei avariate n vederea:
- meninerii navei n stare de plutire;
- reducerii nclinrilor transversale i longitudinale ale navei (banda i asieta) pn la
limitele
care i asigur deplasarea i guvernabilitatea;
- refacerii stabilitii i rezervei de flotabilitate a navei, astfel nct aceasta s nu se
rstoarne i
s nu se scufunde.
Lupta pentru nescufundarea navei numai cu mijloace de scoatere a apei practic este
nejustificat, pentru c viteza de ptrundere a apei este mult mai mare dect capacitatea
oricror mijloace.
Se tie c viteza cu care apa ptrunde n nav (v) se calculeaz cu formula:
gh v 2
,
unde:
g acceleraia gravitaiei; este egal cu
2
81 , 9 s m
;
h adncimea la care se afl gaura de ap.
Cantitatea de ap care ptrunde n nav n fiecare secund este direct proporional
cu suprafaa gurii de ap i se calculeaz cu formula:
S gh S v Q 2
,
n care:
Q cantitatea de ap (n metri cubi);
S suprafaa gurii de ap n metri ptrai.
Dac presupunem c o nav avariat are o gaur de ap cu suprafaa de 1 m
2
, la 5
m sub linia de plutire i nlocuim aceste date n formul, constatm c ntr-un interval de timp
de o or vor ptrunde n nav 36000 m
3
de ap.
De aceea trebuie considerat c soluia unic i sigur pentru asigurarea
nescufundrii navei o constituie sistemul de compartimentare a navei prin perei etani foarte
rezisteni. Prin inundarea unuia sau mai multor compartimente se modific pescajul navei,
deci flotabilitatea, precum i banda sau asieta navei, adic stabilitatea. Dac
compartimentele inundate sunt mari, mari vor fi i schimbrile pe care inundarea acestora le
provoac flotabilitii i stabilitii navei. Din aceast cauz, pentru a asigura nescufundarea
navei este necesar ca aceasta, din construcie, s fie mprit n ct mai multe
compartimente etane cu volum mic.
2.8.1. Influena compartimentelor inundate asupra flotabilitii i stabilitii
navei
Parametrii care determin poziia navei dup inundarea unuia sau mai multor
compartimente sunt: pescajul mediu (T), nlimea metacentric (h), unghiul de band () i
unghiul de asiet (
).
Verificarea modului cum se modific aceti parametri n cazul inundrii unui
compartiment se poate efectua prin dou metode.
Prima metod const n faptul c apa care a inundat compartimentul inundat este
considerat ca o greutate primit la bord, iar elementele flotabiliti i stabilitii se calculeaz
ca atare.
A doua metod pornete de la considerentul c compartimentul inundat este pierdut
ca i cum acest compartiment ar fi fost tiat i scos de la bord n mod intenionat, iar corpul
navei n regiunea respectiv este format din pereii i punile care delimiteaz compartimentul
inundat.
Dup cum se observ, prima metod consider c prin inundarea compartimentului
se modific greutatea navei (deplasamentul) ca urmare a ambarcrii greutii respective, ier
a doua metod consider c se modific volumul carenei (deplasamentul volumetric), ca
urmare a pierderii volumului compartimentului inundat.
Folosind aceste dou metode se ajunge n mod practic la acelai rezultat n ceea ce
privete pescajul, unghiurile de band i asiet, dar nlimile metacentrice vor fi diferite.
n urma avariilor suferite la corpul navei deosebim mai multe cazuri de inundare a
compartimentelor:
cazul nti, cnd compartimentul este inundat complet, dar nchis deasupra i etan,
astfel c apa nu se poate rspndi n alte compartimente, deci cantitatea de ap ambarcat
nu mai poate crete. n acest caz, pentru efectuarea calculelor nu mai are importan dac
apa din compartiment comunic sau nu cu apa din afara bordului;
cazul al doilea, cnd compartimentul este deschis deasupra, dar inundat parial i
nu comunic cu exteriorul. Acest caz poate avea loc atunci cnd gaura a fost astupat sau
compartimentul a fost inundat intenionat. Deci cantitatea de ap ambarcat nu mai poate
crete, dar lichidul are suprafaa liber i la nclinrile navei poate ptrunde i n alte
compartimente;
cazul al treilea, cnd compartimentul este deschis la partea superioar, comunic
prin gaura de ap cu exteriorul i la nclinrile navei, apa nu numai c se poate rspndi n
alte compartimente, dar cantitatea ei crete continuu, meninndu-se la nivelul liniei de ap
din exterior.
n cazul nti i al doilea de inundare a compartimentelor parametrii nescufundrii
navei se calculeaz n mod similar situaiei cnd se ambarc o greutate la bord.
n primul caz, compartimentul inundat poate fi considerat ca o ncrctur solid
ambarcat la bord a crei greutate (p) este egal cu greutatea apei de mare ptrunse la
bord, iar centrul de greutate al acestei ncrcturi are coordonatele x, y i z, corespunztor
centrului de greutate al volumului compartimentului inundat (v).
Modificarea pescajului mediu al navei n cazul inundrii compartimentului se
calculeaz cu formula cunoscut, corespunztoare ambarcrii unei greuti la bord:
S
p
T
,
n care:
p greutatea apei ambarcate la bord (n tone);
- greutatea specific a apei (1,000 pentru ap dulce i 1,025 pentru ap de mare);
S suprafaa liniei de plutire actuale.
Modificarea nlimii metacentrice transversale ( h ) se calculeaz cu formula:
,
_
+
+
Z h T T
p D
p
h
0
2
1
,
iar nlimea metacentric a navei dup inundarea compartimentului (h
1
) cu formula:
,
_
+
+
+ + Z h T T
p D
p
h h h h
0 1 0 1
2
1
,
n care:
h
0
nlimea metacentric iniial;
D deplasamentul iniial al navei;
T pescajul navei pe liniei de plutire iniial (W
0
L
0
);
Z cota centrului de greutate al volumului compartimentului inundat.
Unghiurile de band i asiet provocate de inundarea compartimentului pot fi
determinate cu formulele:
( )
( )
( )
1
1
H p D
x x p
tg
h p D
y p
tg
f
+
sau
( )
( )
( )
1
0
3
1
0
3
57
57
H p D
x x p
h p D
py
f
+
;
n care:
x abscisa centrului de greutate al compartimentului inundat;
y ordonata centrului de greutate al compartimentului inundat;
x
f
abscisa centrului de greutate al suprafeei liniei de plutire actuale.
n cazul al doilea de inundare a compartimentului, modificrile flotabilitii i stabilitii
navei se calculeaz la fel ca i n cazul primirii la bord a unei ncrcturi lichide cu suprafaa
liber.
Acest caz se deosebete de primul numai prin influena pe care o poate avea asupra
stabilitii deplasarea lichidului din compartimentul incomplet inundat la nclinrile navei.
n consecin, att modificarea pescajului mediu, ct i a unghiului de band i asiet
se calculeaz cu aceleai formule ca i n primul caz.
Mrimea cu care se modific ns nlimea metacentric se calculeaz cu formula:
v
i
h
x
1
,
n care:
1
- greutatea specific a lichidului din compartimentul inundat;
- greutatea specific a apei de mare;
x
i
- momentul de inerie al suprafeei libere a lichidului din compartimentul inundat,
fa de axa longitudinal care trece prin centrul de greutate al acestei suprafee;
v volumul lichidului din compartimentul inundat.
n cazul al treilea de inundare, cnd compartimentul inundat comunic direct cu
exteriorul i este deschis la partea superioar, modificrile pescajului i unghiului de band i
asiet se calculeaz dup cum urmeaz: considerm c compartimentul inundat a fost scos,
nu mai exist la bord. Prin reducerea unei pri din volumul carenei, ca urmare a pierderii
compartimentului respectiv, se reduce flotabilitatea navei, dar cum greutatea navei a rmas
aceeai, echilibrul se restabilete prin creterea pescajului navei.
Pentru a determina aceast modificare a pescajului avem nevoie de urmtoarele
date iniiale:
v volumul apei care a inundat compartimentul;
p greutatea apei ptrunse n compartimentul inundate
v p
;
T pescajul iniial al navei corespunztor liniei de plutire W
0
L
0
;
T - modificarea pescajului ca urmare a inundrii compartimentului;
T
1
pescajul navei dup inundarea compartimentului, corespunztor liniei de plutire
W
1
L
1
;
S suprafaa liniei de plutire;
s partea din suprafaa liniei de plutire pierdute, corespunztoare suprafeei libere a
lichidului din compartimentul inundat.
Dup cum se observ din figura 2.23, volumul compartimentului pierdut (v) va fi
nlocuit de volumul prii cu care nava se scufund, adic stratul cuprins ntre liniile de plutire
W
0
L
0
i W
1
L
1
. Dac considerm c nava are pereii drepi ntre aceste dou linii de plutire,
atunci volumul cuprins ntre ele va avea ca nlime modificarea pescajului T , iar ca
suprafa a bazei, suprafaa liniei de plutire dup avarie S s.
Fig. 2.23
Deci modificarea pescajului ( T ) se poate calcula cu formula:
( ) s S
v
s S
p
T
.
Dar, odat cu creterea pescajului navei, ca urmare a inundrii compartimentului se
modific i poziia centrului de greutate al carenei, care trece din C n C
1
. Noua cot a
centrului de caren C
1
se calculeaz cu formula:
,
_
+ +
,
_
+ + z
T
T
D
p
z Z
T
T
V
v
z z
c c c
2 2
1
,
n care:
z
c
cota centrului de caren nainte de avarie;
V volumul carenei (deplasament volumetric) care rmne constant dei forma
navei s-a modificat prin excluderea compartimentului inundat;
z cota centrului de greutate (A) al volumului compartimentului inundat (v).
Dar centrul de caren se deplaseaz nu numai pe vertical, ci i n planele
transversal i longitudinal ale navei.
Deplasarea centrului de caren din C n C
1
n plan transversal (
c
y
) se calculeaz
cu formula:
,
_
+
s S
s
l y
D
p
y
c
,
iar deplasarea n planul longitudinal (
c
x
) al navei, cu formula:
,
_
+
s S
s
x
D
p
x
c
1
,
n care x i y sunt coordonatele centrului de greutate (A) al volumului compartimentului
inundat.
Ca urmare a deplasrii centrului de caren la distana c
y
n plan transversal apare
un moment de nclinare (M
i
), iar ca urmare a deplasrii la distana c
x
n plan longitudinal,
apare un moment de asiet (M
a
). Mrimile acestor dou momente se obin din produsul
deplasamentului navei i al deplasrilor centrului de caren:
c
c i
x D Ma
y D M
.
Din egalitatea acestor dou momente de nclinare, cu momentele de redresare Mx i
My, determinate prin formulele metacentrice ale stabilitii, putem calcula valorile unghiurilor
de band () i asiet (
) dup inundarea compartimentului:
,
_
,
_
+
+
s S
s
H D
px
s S
s
h D
py
1 57
1 57
1
0
3
1
0
3
n care h
1
i H
1
reprezint noile valori ale nlimilor metacentrice transversale i
longitudinale.
Pentru determinarea nlimilor metacentrice (h
1
i H
1
) modificate prin inundarea
compartimentului este necesar s efectum o serie de calcule, dup cum urmeaz: pornind
de la formula general a nlimii metacentrice h = r a = r + Z
c
Z
g
se observ c mai nti
trebuie s aflm noile valori ale razelor metacentrice r
1
i R
1
:
V
I
r
x
1
i
V
I
R
f
1
1
, (2.131)
n care
x
I
i
1
f
I
sunt momente de inerie ale liniei de plutire actuale S s raportate la axa
longitudinal Ox
1
i axa transversal Oy
1
care trec prin centrul de greutate (f
1
) al suprafeei
liniei de plutire.
Valorile acestor dou momente de inerie pot fi obinute corectnd momentele de
inerie, deja cunoscute,
x
I
i f
I
ale suprafeei liniei de plutire iniiale S raportate la axele Ox
i Oy
1
, care trec prin centrul ei de greutate (f).
Pentru efectuarea calculelor folosim urmtoarele noiuni:
- a i b coordonatele centrului de greutate al suprafeei lichidului din compartimentul
inundat (s);
- a
1
i b
1
coordonatele centrului de greutate al suprafeei liniei de plutire actuale (S
s);
- i
x
i i
y
momentele de inerie ale suprafeei s raportate la axele longitudinale i
transversale care trec prin centrul ei de greutate.
n acest caz, valorile noilor momente de inerie
1
x
I
i
1
f
I
pot fi determinate cu
formulele:
. 1
; 1
2
2
1
1
a s
s S
s
i I I
b s
s S
s
i I I
y f f
x x x
,
_
+
,
_
+
Avnd n vedere c
s S
s
are o valoare foarte mic n comparaie cu unitatea, acest
membru poate fi neglijat i atunci momentele de inerie
1
x
I
i
1
f
I
pot fi exprimate prin
urmtoarele relaii aproximative:
( )
( ).
;
2
2
1
1
sa i I I
sb i I I
y f f
x x x
+
+
nlocuind aceste expresii ale momentelor de inerie
1
x
I
i
1
f
I
n formula (2.131)
aflm relaiile care exprim valorile razelor metacentrice r
1
i R
1
dup inundarea
compartimentului:
( )
( )
V
sa i I
R
V
sb i I
r
y f
x x
2
1
2
1
+
din care apare evident c r
1
i R
1
sunt mai mici dect razele metacentrice iniiale
V
I
r
x
0
i
V
I
R
y
1
.
n continuare, fcnd nlocuirile necesare, obinem expresiile cu ajutorul crora
putem calcula nlimile metacentrice h
1
i H
1
dup inundarea compartimentului:
( )
( )
.
2
;
2
2
0 1
2
0 1
1
1
]
1
+ +
1
]
1
+ +
p
sa i
Z
T
T
D
p
H H
p
sb i
Z
T
T
D
p
h h
y
x
mpiedicarea rspndirii apei n interiorul navei
Pe baza rapoartelor primite de la grupele de avarii i posturile de lupt, comandantul
navei la propunerea efului mecanic (comandantul UL-5) hotrte prima linie de aprare,
adic limitele inundrii compartimentelor unde apa trebuie oprit cu orice pre. Aceast prim
linie de aprare se fixeaz, de regul, n zona celor mai apropiai perei etani fa de
compartimentul inundat.
Aciunile echipajului pentru mpiedicarea rspndirii apei n alte compartimente
constau n ntrirea pereilor etani din prima linie de aprare, astuparea gurilor prin care
ptrunde sau ar putea ptrunde apa din compartimentul inundat n compartimentele vecine i
punerea n funciune a mijloacelor de evacuare a apei.
n cazul cnd apa strbate prima linie de aprare i cu toate msurile luate nu poate
fi oprit rspndirea ei n compartimentele vecine, atunci se pregtete a doua linie de
aprare. De regul, aceast a doua linie de aprare se fixeaz n zona pereilor etani cei
mai apropiai de prima linie de aprare.
Astuparea gurilor de ap i evacuarea apei din compartimentele inundate
Aa cum am vzut n capitolul anterior, inundarea unuia sau mai multor
compartimente ale navei are ca urmare direct micorarea flotabilitii i stabilitii.
Pentru restabilirea calitilor nautice ale navei este necesar a evacua apa din
compartimentele inundate. Dar acest lucru nu se poate face dect dup ce gurile de ap au
fost astupate, dac nu total, cel puin parial, astfel ca ptrunderea apei s fie mai mic dect
capacitatea mijloacelor de evacuare.
Posturile de lupt au obligaia prin rol de a trece la astuparea gurilor imediat ce le-
au descoperit, fr a mai atepta alt comand.
n principiu trebuie astupate toate gurile de ap, att cele aduse n sectorul operei
vii, ct i cele aflate deasupra liniei de plutire, deoarece prin modificarea pescajului sau
bandarea navei i acestea pot ajunge sub linia de plutire.
Evacuarea apei din compartimentele inundate se execut potrivit ordinelor
comandantului navei i ale comandantului UL-5, care n hotrrile care le iau vor ine seama
de urmtoarele principii:
- mai nti se evacueaz apa din compartimentele superioare, iar dac acest lucru
nu se poate face rapid, atunci apa din compartimentele superioare se golete n
compartimentele inferioare, unde exist mijloace de evacuare;
- este interzis a se face transvazarea apei din compartimentele care comunic direct
cu marea n alte compartimente, pentru c aceasta duce la creterea cantitii de ap
ptruns n nav;
- evacuarea (transvazarea) apei din diferite compartimente s se efectueze
succesiv, nu simultan din mai multe compartimente, pentru c att timp ct operaia este n
curs de executare vor exista la bord suprafee libere care micoreaz stabilitatea navei.
Redresarea navei, aducerea pe chil dreapt
Prin redresarea navei nelegem aducerea ei pe chil dreapt, efectund o serie de
msuri menite s micoreze unghiurile de band i asiet. Redresarea navei se face cu
mult grij, verificnd continuu rezerva de flotabilitate.
Redresarea navei poate fi realizat prin urmtoarele trei procedee:
- evacuarea ncrcturilor lichide peste bord sau transvazarea lor dintr-un
compartiment n altul dispus simetric;
- contrainundare;
- procedeul combinat, care const din contrainundare, transvazare i evacuare a
ncrcturilor lichide.
Evacuarea peste bord a apei de mare ptrunse n interiorul navei constituie cel mai
avantajos procedeu din punctul de vedere al pstrrii rezervei de flotabilitate.
Fig. 2.26
Transvazarea apei (combustibilului) dintr-un compartiment n altul are efectul
transportului de greuti la bord i prezint avantajul c nava poate fi adus pe chil dreapt
fr s-i modifice flotabilitatea i pescajul.
Procedeul aducerii navei pe chil dreapt prin contrainundare se folosete atunci
cnd este necesar ca nava s se redreseze repede, cu scopul de a prentmpina o
rsturnare.
Acest procedeu de redresare a navei const n introducerea apei de mare n
compartimentele dispuse simetric cu cele inundate. Cu alte cuvinte, nava mai primete o
cantitate de ap care-i scade flotabilitatea i-i mrete pescajul. Din acest punct de vedere
procedeul contrainundrii prezint dezavantaje i de aceea trebuie folosit cu mult atenie.
Cnd se execut redresarea navei prin acest procedeu se inund n primul rnd
tancurile de band i asiet. n cazul cnd nava nu dispune de un sistem special de band i
asiet se poate recurge la inundarea altor compartimente, dar numai n cazuri extreme i
numai dup ce s-a calculat cu precizie rezerva de flotabilitate.
Procedeul combinat se folosete n scopul redresrii rapide a navei i const n
inundarea unor compartimente n paralel cu executarea transvazrii sau evacurii
ncrcturilor lichide din compartimentele avariate.
Indiferent de procedeul folosit, pe timpul efecturii redresrii navei trebuie
respectate urmtoarele principii>
- in toate cazurile sa se stabileasc cu precizie care anume compartimente sunt
inundate si care este situaia lor;
- masurile pentru redresarea navei se pun in aplicare numai dup ce s-a verificat
integritatea bordului liber, punilor si pereilor etani, pentru ca in timpul ndreptrii
navei sa nu intre apa prin gurile aflate iniial deasupra liniei de plutire;
- sa se ndeplineasc numai operaii care pot fi ncetate imediat in caz de nevoie;
- redresarea navei prin inundarea compartimentelor din borduri sau transvazarea
ncrcturilor lichide in aceste compartimente se executa numai in cazul cnd nava
are stabilitate iniial pozitiva.
In cazul cnd nava avariata a ambarcat o mare cantitate de apa, exista pericolul ca
stabilitatea iniial sa fie negativa.
Pentru a aprecia daca nava avariata are stabilitate iniial negativa pot fi folosii
urmtorii indici exteriori:
- dup inundarea unor compartimente simetrice nava rmne bandata;
- echilibru nestabil, marcat de nclinarea instantanee a navei dintr-un bord in altul;
- la punerea crmei, nava se inclina dintr-un bord in altul, iar la aducerea crmei in
ax, nava rmne nclinat;
- existenta unor cantiti mari de apa cu suprafaa libera pe puni, platforme si in
compartimente.
Redresarea unei nave care are stabilitate iniial negativa trebuie sa nceap in mod
obligatoriu cu refacerea stabilitii, in care scop se pot ndeplini urmtoarele masuri:
- ndeprtarea apei de pe puni si platforme fie prin evacuare peste bord, fie prin
scurgerea ei in compartimentele inferioare;
- eliminarea scurgerii spontane a apei dintr-un bord in altul, nelsnd compartimente
inundate cu suprafaa libera;
- lestarea navei prin inundarea sau transvazarea apei ptrunse la bord sau a
combustibilului in tancurile inferioare goale pana la umplerea lor completa.
Dup ce nava si-a recptat stabilitatea iniial pozitiva se poate trece la executarea
masurilor
de redresare, folosind unul din procedeele prezentate.
Din toate cele artate mai sus rezulta ca redresarea navei avariate este o misiune de
foarte mare rspundere, care nu poate fi ndeplinit la ntmplare, ci in mod raional, pe baza
unor calcule precise, transformate in ordine clare de ctre un comandant hotrt si executate
oportun si exact de ctre un echipaj instruit.
S-ar putea să vă placă și
- Bazele MarinarieiDocument105 paginiBazele MarinarieiJohn PerryÎncă nu există evaluări
- Curs de MarinarieDocument119 paginiCurs de MarinarieCristi Samoila100% (2)
- Constructia NaveiDocument21 paginiConstructia NaveiViorel Axentiev100% (1)
- Pregatire MarinareascaDocument105 paginiPregatire MarinareascaCristi CociasÎncă nu există evaluări
- Pregatire Marinareasca CursDocument125 paginiPregatire Marinareasca CursMaxim AlexÎncă nu există evaluări
- PREGĂTIRE MARINĂREASCĂ-cursDocument126 paginiPREGĂTIRE MARINĂREASCĂ-cursMANIU RADU-GEORGIANÎncă nu există evaluări
- C 2 - Plane Si Linii de Referinta. Dimensiunile NaveiDocument47 paginiC 2 - Plane Si Linii de Referinta. Dimensiunile NaveiRoxy PoxyÎncă nu există evaluări
- Curs de Baza StabilitateDocument60 paginiCurs de Baza Stabilitateior2101Încă nu există evaluări
- 11 B M2-Constructia - NaveiDocument23 pagini11 B M2-Constructia - NaveiALINA LUCREŢIA DUMITRAŞ100% (1)
- Constructia NaveiDocument23 paginiConstructia NaveiAna Maria RusuÎncă nu există evaluări
- Curs Pregătire Marinărească 09-10 - DiferentaDocument75 paginiCurs Pregătire Marinărească 09-10 - DiferentaAyhan RegepÎncă nu există evaluări
- Unit 2 Linii Şi PlaneDocument6 paginiUnit 2 Linii Şi PlaneBrătianu ConstantinÎncă nu există evaluări
- Vitalitate TimonieriDocument37 paginiVitalitate TimonieriAzis CadriÎncă nu există evaluări
- TCVNDocument38 paginiTCVNAdiÎncă nu există evaluări
- Manevra Navei (Full)Document167 paginiManevra Navei (Full)Modrisan CristianÎncă nu există evaluări
- Constructia Si Vitalitatea NaveiDocument46 paginiConstructia Si Vitalitatea NaveiLisovencu GigiÎncă nu există evaluări
- DEFINITIA, CALITATILE Si GEOMETRIA NAVEIDocument10 paginiDEFINITIA, CALITATILE Si GEOMETRIA NAVEIDragos SeitanÎncă nu există evaluări
- Test TCNDocument14 paginiTest TCNDincu VladÎncă nu există evaluări
- Constructia Navei Tema 2Document5 paginiConstructia Navei Tema 2Viorel AxentievÎncă nu există evaluări
- Curs Arh NavalDocument36 paginiCurs Arh NavalbucuricaÎncă nu există evaluări
- MN Note Curs - BRINZA + HANZUDocument167 paginiMN Note Curs - BRINZA + HANZUEmil-Junior IordacheÎncă nu există evaluări
- TCVN Intrebari MLT 1Document10 paginiTCVN Intrebari MLT 1George CaraliÎncă nu există evaluări
- Unit 4. Caracteristici de Volum Si Greutate PDFDocument10 paginiUnit 4. Caracteristici de Volum Si Greutate PDFGabryelbrutusÎncă nu există evaluări
- MN Note Curs - Brinza + HanzuDocument170 paginiMN Note Curs - Brinza + HanzuandralucaÎncă nu există evaluări
- MarinarieDocument68 paginiMarinarieRobby Rby100% (1)
- Pregatire Marinareasca GrileDocument11 paginiPregatire Marinareasca GrileCosmin Iulian100% (3)
- Lucrari de Intretinere La Bordul Navei MaritimeDocument85 paginiLucrari de Intretinere La Bordul Navei MaritimeNicaur Dan Popescu0% (1)
- MarinarieDocument45 paginiMarinarieRobby RbyÎncă nu există evaluări
- 41 - 47 - Amortizarea Balansarii Navelor MaritimeDocument7 pagini41 - 47 - Amortizarea Balansarii Navelor MaritimeAndreyÎncă nu există evaluări
- Intrebari Examen StabilitateDocument11 paginiIntrebari Examen StabilitateAvarvarei Moisa RalucaÎncă nu există evaluări
- Curs PMDocument145 paginiCurs PMNona ChloeÎncă nu există evaluări
- Subiecte TCNDocument18 paginiSubiecte TCNCalin RamonaÎncă nu există evaluări
- Draft SurveyDocument144 paginiDraft Surveyserifu_jon5209Încă nu există evaluări
- TCN Cursul Nr.3 Rezistenta La InaintareDocument5 paginiTCN Cursul Nr.3 Rezistenta La Inaintarebubu_18100% (1)
- 1Document14 pagini1Ştefan CotruţăÎncă nu există evaluări
- STABILITATE SI ASIETA - Intrebari Rezolvate Toate.Document15 paginiSTABILITATE SI ASIETA - Intrebari Rezolvate Toate.Trusca AdrianÎncă nu există evaluări
- Test TCN I TM Varianta 2 (6-8)Document5 paginiTest TCN I TM Varianta 2 (6-8)Antonio FlorinÎncă nu există evaluări
- PM - Unit 2. Plane Si Linii de ReferintaDocument19 paginiPM - Unit 2. Plane Si Linii de ReferintaAlinCiureaÎncă nu există evaluări
- U12 - SSNDocument3 paginiU12 - SSNPatricia CottonÎncă nu există evaluări
- Referat - Clopotel.ro-Ecuatii Si Inecuatii LogaritmiceDocument16 paginiReferat - Clopotel.ro-Ecuatii Si Inecuatii LogaritmiceEmanuela DascaluÎncă nu există evaluări
- U15 - VibrDocument5 paginiU15 - VibrPatricia CottonÎncă nu există evaluări
- Exploatarea Tancurilor PetroliereDocument21 paginiExploatarea Tancurilor PetrolierePatricia CottonÎncă nu există evaluări
- GMDSS Bun ScurtDocument35 paginiGMDSS Bun ScurtPatricia CottonÎncă nu există evaluări
- Instalatia de Gaz InertDocument11 paginiInstalatia de Gaz InertPatricia Cotton100% (1)
- COLREG RomanaDocument36 paginiCOLREG Romanaostafedragosh100% (1)
- Introduce ReDocument2 paginiIntroduce RecatalinÎncă nu există evaluări
- Catalog ProduseDocument24 paginiCatalog ProdusetanopandutÎncă nu există evaluări
- Unitatea de Invatare 3Document16 paginiUnitatea de Invatare 3catalinÎncă nu există evaluări
- Unitatea de Invatare 4Document18 paginiUnitatea de Invatare 4Patricia CottonÎncă nu există evaluări
- Unitatea de Invatare 1Document8 paginiUnitatea de Invatare 1catalinÎncă nu există evaluări
- Unitatea de Invatare 5Document7 paginiUnitatea de Invatare 5Patricia CottonÎncă nu există evaluări
- Introduce ReDocument2 paginiIntroduce RecatalinÎncă nu există evaluări
- Unitatea de Invatare 3Document16 paginiUnitatea de Invatare 3catalinÎncă nu există evaluări
- Comunicatii Maritime 353pagDocument353 paginiComunicatii Maritime 353pagPatricia Cotton100% (2)
- Tipuri de Nori - C.pescaruDocument67 paginiTipuri de Nori - C.pescaruPatricia CottonÎncă nu există evaluări
- PEV 1 - Principii PEV 2011Document25 paginiPEV 1 - Principii PEV 2011Patricia CottonÎncă nu există evaluări
- Focus II Manual 147 176Document30 paginiFocus II Manual 147 176Gheorghe CilteaÎncă nu există evaluări
- ArgintariaDocument2 paginiArgintariaPatricia CottonÎncă nu există evaluări
- Ghid Horburg1Document2 paginiGhid Horburg1Iulia ChituÎncă nu există evaluări
- Focus II Manual 1 45Document46 paginiFocus II Manual 1 45Luci Lucio100% (1)
- Ghid Horburg1Document2 paginiGhid Horburg1Iulia ChituÎncă nu există evaluări
- Ghid de Utilizare Microsoft Office 2007Document135 paginiGhid de Utilizare Microsoft Office 2007ewosmart100% (7)
- Subiecte Clasa A 5-ADocument6 paginiSubiecte Clasa A 5-APatricia Cotton100% (1)
- Audioguide Lesetext Rum 30122008 OlschDocument2 paginiAudioguide Lesetext Rum 30122008 OlschPatricia CottonÎncă nu există evaluări
- BAC Suport Curs M3 Word 2007Document18 paginiBAC Suport Curs M3 Word 2007Ionică Cristi PopaÎncă nu există evaluări
- Apel 2013 COMDocument27 paginiApel 2013 COMPatricia CottonÎncă nu există evaluări
- Grila Clasa A 5-ADocument1 paginăGrila Clasa A 5-APatricia CottonÎncă nu există evaluări