Documente Academic
Documente Profesional
Documente Cultură
Licenta Final
Încărcat de
Ofiter90Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Licenta Final
Încărcat de
Ofiter90Drepturi de autor:
Formate disponibile
NECLASIFICAT
NECLASIFICAT
Pagina 1 din 143
NECLASIFICAT
NECLASIFICAT
Pagina 2 din 143
NECLASIFICAT
NECLASIFICAT
Pagina 3 din 143
NECLASIFICAT
NECLASIFICAT
Pagina 4 din 143
NECLASIFICAT
NECLASIFICAT
Pagina 5 din 143
CUPRINS
Introducere......................................................................................................
pag. 6
1. Rolul i locul sistemelor digitale de nregistrare a parametrilor de zbor
n integrarea informaional a aeronavei......................................................
pag. 8
1.1. Rolul i locul sistemelor digitale de nregistrare a parametrilor de
zbor n contextul avionicii moderne............................................................
pag. 8
1.2. Evoluia nregistratoarelor de zbor....................................................... pag. 10
1.3. Standardizare....................................................................................... pag. 13
1.4. Clasificarea nregistratoarelor de date..................................................
pag. 14
1.5. nregistratorul digital cu memorii statice............................................. pag. 15
1.6. Structura fizic i cerinele de rezisten ale nregistratoarelor............ pag. 17
2. Stabilirea cmpului informaional achiziionat........................................
pag. 20
2.1. Prezentarea informaiilor nregistrate la bord....................................... pag. 20
2.2. Studiul aparatului de zbor.................................................................... pag. 25
2.3. Stabilirea parametrilor nregistrai....................................................... pag. 44
3. Stabilirea procesrilor de date aferente nregistrarii de date .................. pag. 47
3.1. Achiziia semnalelor............................................................................ pag. 47
3.2. Stabilirea ratei de eantionare.............................................................. pag. 68
3.3. Multiplexarea semnalelor.................................................................... pag. 76
3.4. Circuite de eantionare-memorare (SH).............................................. pag. 81
3.5. Cuantizarea semnalelor....................................................................... pag. 86
3.6. Codarea semnalelor............................................................................. pag. 88
3.7. Conversia analog-numeric................................................................. pag. 89
4. Arhitectura hardware a sistemului............................................................
pag. 94
4.1. Preliminarii.......................................................................................... pag. 94
4.2. Arhitectura hardware a sistemului....................................................... pag. 95
4.3. Blocul de alimentare al nregistratorului.............................................. pag. 96
4.4. Blocul de achiziie i prelucrare a semnalelor...................................... pag. 97
4.5. Microcontroller-ul ATxmega128B3....................................................
pag. 99
4.6. Convertorul analog numeric al ATxmega128B3.................................
pag. 103
4.7. Blocul memoriei protejate................................................................... pag. 106
5.Arhitectura fluxului de date vehiculat i controlul funcionrii
sistemului.........................................................................................................
pag. 114
5.1. Introducere.......................................................................................... pag. 114
5.2. Controller-ul accesului direct la memoria intern DMAC.................
pag. 116
5.3. Interfaa SPI pag. 118
5.4. Descrierea modului de comunicare i control al memoriei cu
microcontroller-ul prin interfaa SPI..........................................................
pag. 121
5.5. Interfaa sistemului cu echipamentul de sol ......................................... pag. 126
6. Realizare experimental.............................................................................. pag. 130
7. Concluzii....................................................................................................... pag. 136
Bibliografie....................................................................................................... pag. 138
Anexa 1.............................................................................................................
pag. 139
NECLASIFICAT
NECLASIFICAT
Pagina 6 din 143
Introducere
n perioada contemporan, creterea volumului traficului aerian precum i
sporirea cerinelor impuse aviaiei militare au condus la creterea abrupt a
numrului de aeronave i zboruri, a densitii acestora, a indicilor de utilizare
precum i a numrului de incidente.
Datorit noilor cerine de securitate a zborului precum i de monitorizare a
paremetrilor de zbor ai aeronavelor s-a simit nevoia unor echipamente de
nregistrare a parametrilor de zbor de clas superioar, care s nlesneasc
interpretarea ntr-un timp ct mai redus i ct mai exact a datelor memorate.
n anul 1957, din dorina de a simplifica modalitatea de stabilire a cauzelor
unui accident, US Civile Aeronautics Autority (Autoritatea Aeronautic Civil
din Statele Unite) a propus ca toate avioanele mai grele de 9 tone s fie dotate cu
un dispozitiv de nregistrare a informaiilor, denumit cutia neagr. Acesta urma
s nregistreze datele importante privind zborul: direcia, viteza, altitudinea,
acceleraia vertical i timpul. De atunci, tehnologia a evoluat de la nregistrarea
informaiilor pe folie metalic i fire din oel, hrtie termosensibil, film
fotografic, la nregistrarea pe band magnetic. Cutiile negre de ultim generaie
nu au pri mobile i nregistreaz direct pe o unitate de memorie solid,
constituind pri ale unor sisteme care includ calculatoare de sistem, calculatoare
de proces, module de testare etc., aceste sisteme gsindu-i locul n ceea ce astzi
este cunoscut drept avionic integrat, aeronavele moderne fiind organizate
asemeni unei reele n jurul unei magistrale centrale de date .
Cutia neagr unic a fost nlocuit cu o pereche de cutii negre. Una dintre
acestea este CVR (Cockpit Voice Recorder nregistrator al vocilor din cockpit),
care poate nregistra pn la dou ore de conversaie i sunete din cockpit. Cele
mai noi FDR (Flight Data Recorder nregistrator al datelor despre zbor) pot
nregistra pn la 24 de ore de informaie, privind apoximativ 700 de aspecte
diferite legate de zbor, cum ar fi: presiunea uleiului, viteza de rotaie a prilor
mobile pentru fiecare dintre motoare, unghiurile flapsurilor i temperatura din
cal, etc. Pentru a asigura o protecie maxim a cutiilor negre, acestea sunt plasate
ntr-o zon a avionului care este, de obicei, ultima care se izbete de pmnt n
cazul unei prbuiri , i anume coada. ntreaga parte anterioar a avionului
funcioneaz precum un amortizor pentru cutiile negre.
Cea mai nou generaie de cutii negre este extrem de rezistent. Memoria
solid este nconjurat de un strat de aluminiu, care este acoperit cu un material
extrem de rezistent la cldur i care, la rndul lui, este acoperit de un strat gros
de oel inoxidabil. Cutia neagr poate rezista unei temperaturi de 1.100C timp de
o or, urmat de o temperatur de 260C timp de 10 ore. n testele privind
impactul n caz de prbuire, cutia neagr trebuie s poat rezista unei acceleraii
NECLASIFICAT
NECLASIFICAT
Pagina 7 din 143
de 3.400 G. Oamenii i pierd cunotina dac sunt supui unei acceleraii de 5 G
mai mult de 5 secunde. Testul se face, de obicei, prin aruncarea cutiei negre
dintr-un tun. n cadrul testului de perforare, o greutate de 227 de kilograme cu un
vrf din oel ntrit, cu diametrul de 6,5 mm, este lsat s cad pe cutia neagr de
la o nlime de 3 m. O cutie neagr poate face fa i presiunii de pe fundul
oceanului, rezistnd n ap srat timp de o lun. Datorit tuturor acestor
caracteristici tehnice de excepie, o cutie neagr cost ntre 20.000 i 30.000 $.
i, cutia neagr nu este deloc neagr. n 1965, culoarea sa a fost schimbat
n portocaliu , o culoare care poate fi reperat cu uurin. Nu se tie cu exactitate
de ce poart numele de cutie neagr. Conform unei teorii populare, dup ce este
acoperit de flcri, portocalia cutie neagr devine, ntr-adevr, neagr, din cauza
funinginii. O alt explicaie ar putea fi conectat cu noiunea de black box
utilizat n automatic, nregistratorul de zbor interpretndu-se ca o cutie n care
nu tii ce se afl. ns acestea sunt interpretri simpliste, motivul pentru utilizarea
acestui termen fiind necunoscut i bazat pe o simpl coinciden de termeni .
NECLASIFICAT
NECLASIFICAT
Pagina 8 din 143
1. Rolul i locul sistemelor digitale de nregistrare a
parametrilor de zbor n integrarea informaional a aeronavei
1.1. Rolul i locul sistemelor digitale de nregistrare a parametrilor de
zbor n contextul avionicii moderne
Att apariia ct i dezvoltarea electronicii moderne, a informaticii i a
tehnicii de calcul au avut un rol bine definit i foarte prompt asupra dezvoltrii i
mbunatirii avionicii moderne. Astfel, ntr-un interval mic de timp, aproape toat
aparatura i toate instrumentele de bord ale aeronavelor care erau construite n
mare parte doar pe principii mecanice au fost modernizate si completate cu pari
electronice care au condus la mbuntirea perfomanelor, dar care au ajutat i la
integrarea lor n arhitectura aeronavei. La nceput au aprut unele transmitoare
electrice de semnal care mai apoi au devenit electronice. Acestea au fost urmate
ndeaproape de filtre de semnal, amplificatoare i n ultim instan de
calculatoarele analogice. n aceast manier s-a reuit prelucrarea suplimentar a
informaiei oferite pilotului care i-a simplificat procesul de luare a deciziilor,
reducandu-i totodat i o serie din sarcinile de rutin pe care trebuia s le
ndeplineasc.
Marele salt n dezvoltarea avionicii moderne s-a produs o dat cu
introducerea la bord a tehnicii digitale. Aici discutm de echipamente extrem de
versatile si fiabile, care printr-un simplu efort de programare permit fixarea,
mbuntirea i chiar uneori modificarea funciei ndeplinite. Principiul cel mai
potrivit i mai cunoscut care nu poate fi imaginat fr existena avionicii digitale
este principiul fly-by-wire. Acesta este un sistem ce a nlocuit controlul manual
convenional al aeronavelor cu o interfa electronic, comenzile de micare
executate de pilot fiind convertite n semnale electrice transmise cu ajutorul
firelor. Sistemul fly-by-wire permite de asemenea ca semnale automate trimise
de computerele aeronavei, fr implicarea pilotului, s poat efectua comenzi,
cum este sistemul de stabilizare automat a aeronavei.
Indiferent dac aeronavele moderne sunt utilizate n sectorul civil sau
militar, pentru asigurarea unui rspuns adecvat la performanele cerute, se impune
echiparea cu sisteme de avionic i de armament avansate, care pe langa
asigurarea funciilor sistemelor vitale ale aeronavei cum ar fi: propulsia,
combustibilul, comenzile etc. trebuie s asigure i funcii suplimentare neaprat
necesare indeplinirii cu succes a misiunilor, precum: navigaia, comunicaia,
utilizarea armamentului i alte sisteme specifice, ajungndu-se la creterea
complexitii aeronavei, n condiiile constngerilor de spaiu disponibil i mas
de zbor impuse de forma i performanele aerodinamice ale aparatului de zbor.
NECLASIFICAT
NECLASIFICAT
Pagina 9 din 143
Metoda clasic de soluionare a acestor cerine prin instalarea independent
a echipamentelor care intr in componena sistemelor de avionic i armament,
utiliznd cablaje i sisteme de protecie dedicate, nu mai este de luat n considerare
n toate cazurile, din cauza repercursiunilor nefavorabile asupra raportului de
mas dar i asupra fiabilitii aeronavei. Pentru a putea rspunde acestor cerine a
fost necesar o abordare sistemic a proiectrii i instalrii echipamentelor de
avionic armament, care se face n regim integrat, comandate de unul sau
calculatoare de bord, asigurndu-se posibilitatea de a dispune, ntr-o arhitectur
distribuit n ntreaga aeronav, toate elmentele componente ale sistemului, i
totodat capacitatea de comunicare coerent ntre acestea.
Echipamentele de nregistrare a parametrilor de zbor de ultim generaie nu
pot face excepie de la cerinele mai sus menionate. Totui, datorit funciilor
deosebite realizate la bordul aeronavelor, exist o particularitate care permite ca
tratarea problematicii acestora s se realizeze ntr-o manier diferit.
Putem privi nregistratorul de bord ca pe un element parazit deoarece
acesta doar culege informaii despre aeronav i echipamentele sale, fr a furniza
vreun semnal sau vreo informaie ctre celelalte echipamente pe toat durata
zborului. Acesta este motivul pentru care legtura dintre nregistrator si restul
echipamentelor trebuie s fie pe ct de slab este posibil, altfel zis, defectarea
oricrui dintre echipamente nu trebuie sa perturbe funcionarea nregistratorului.
Din aceast perspectiv reiese c ori de cate ori este posibil, nregistratorul trebuie
dotat cu traductoare proprii, decizie care se gasete n contradicie cu
recomandarea general de utilizare a informaiei n comun de ctre mai multe
echipamente.
Figura 1.1. nregistratorul parametrilor de zbor
NECLASIFICAT
NECLASIFICAT
Pagina 10 din 143
1.2. Evoluia nregistratoarelor de zbor
Nevoia nregistrrii parametrilor de zbor a fost simit nc de la
nceputurile aviaiei, primul echipament de nregistrare fiind realizat i utilizat de
catre fraii Wright pe unul din avioanele lor n anii 1903. Aparatul realizat de
acetia nregistra turaia motorului, timpul i distana parcurs pe o band de
hrtie. De atunci i pn dup cel de-al doilea razboi mondial nu au mai aprut
ncercri de a realiza astfel de dispozitive.
O dat cu apariia primelor aeronave mari de transport pasageri, precum
Boeing 707 sau Douglas DC-8, au fost introduse i nregistratoarele de zbor.
Aceasta se ntampla la nceputul anilor 50, iar cerinele de atunci erau destul de
reduse, acestea trebuind s nregistreze puini parametri, precum altitudinea i
viteza de zbor, suprasarcina vertical, unghiul de cap i ali parametri de baz.
Figura 1.2. FDR din prima generaie, cu folie metalic
Prima generaie de FDR-uri, realizate mai ales intre anii 1957-1965, utiliza
drept mediu de nregistrare folii metalice din oel inoxidabil (Figura 2) care erau
zgriate cu un vrf ascuit i erau capabile s memoreze 200 pana la 400 de ore
de zbor. Folia metalic era protejat de o cutie instalat n partea din spate a
avionului pentru a asigura supravieuirea datelor in cazul unei prabuiri. De
asemenea, au mai fost realizate echipamente care utilizau benzi de hrtie nnegrit
sau film fotografic (Figura 3).
Obligativitatea instalrii de nregistratoare de zbor pe aeronave s-a impus
printr-un regulament promulgat in SUA de catre Administraia Aviaiei Civile la
1 august 1958, acelai lucru fiind realizat i n Marea Britanie in anul 1960 de
catre Ministerul Transporturilor. Regulamentul prevedea c toate aeronavele
civile de transport cu masa total de zbor mai mare de 9 tone trebuie s dispun
de un echipament de nregistrare protejat la accident. Dup 1965, regulamentele
NECLASIFICAT
NECLASIFICAT
Pagina 11 din 143
au prevzut ca nregistratoarele s fie vopsite portocaliu strlucitor, n scopul
depistrii mai uoare la locul accidentului.
Figura 1.3. FDR din prima generaie, cu film fotografic
Deoarece numrul datelor necesare a fi nregistrate a crescut, n anii 1970
nregistratoarele cu folie metalic, depite fiind de cerine, au fost nlocuite de a
doua generaie de FDR-uri. Acestea erau digitale (DFDR-digital flight data
recorder) i foloseau benzi magnetice asemntoare cu cele de magnetofon
(Figura 4). Banda avea o lungime n jur de 100150 metri si avea capacitatea de
a nregistra pn la 2527 de ore de zbor, interval care putea acoperi un zbor
dus-ntors pe cele mai lungi rute existente la acea perioad. Banda era montat
ntr-o caset care asigura protecia la impact, incendiu i imersie.
Figura 1.4. FDR din generaia a doua, cu band magnetic
NECLASIFICAT
NECLASIFICAT
Pagina 12 din 143
Generaia a treia de nregistratoare (SSFDR-Solid State Flight Data
Recorder) a fost introdus ncepnd cu anul 1990, diferena major constnd n
impunerea memoriilor semiconductoare n locul benzilor magnetice (Figura 5).
Termenul de Solid State se refer la tipul de suport utilizat pentru memorarea
datelor, respectiv memoriile semiconductoare, cel mai frecvent fiind utilizate
memoriile EPROM de tip FLASH.
Figura 1.5. DFDR din a treia generaie, cu memorii semiconductoare
Concomitent cu evoluia tehnologic din domeniul materialelor
semiconductoare i a memoriilor nevolatile precum i cu cea a tehnicii de calcul,
s-a produs i o dezvoltare semnificativ n domeniul nregistratoarelor. Acestea
au devenit tot mai moderne i mai capabile s reziste unor condiii aproape
imposibile, au fost adoptate de ctre toate categoriile de aeronave, i mai mult
dect att, au patruns i n domenii din exteriorul aviaiei, nregistratoarele fiind
folosite i la metrouri, trenuri de mare vitez i pe navetele spaiale, iar n ultima
perioad se observ o tendin de introducere a acestora chiar i n industria
automobilelor.
NECLASIFICAT
NECLASIFICAT
Pagina 13 din 143
1.3. Standardizare
Necesitatea interoperabilitii echipamentelor att n general ct i n
aviaie, a condus la adoptarea pe plan internaional a unor standarde i
reglementri care sa nlesneasc utilizarea echipamentelor pe scar larg i fr
restricii, prin respectarea unor protocoale de comunicaie i intercomunicaie.
Astfel pot fi distinse dou mari categorii de standarde:
-Standarde de echipare sau standarde hardware;
-Standarde de comunicaie sau standarde netware.
Referitor la software, acesta are deocamdat o larg palet de reprezentri
la bord, funcie i de generaia avionului, dar i pentru c n acest domeniu
limitrile sunt mai reduse.
n ceea ce priveste standardele de echipare, aeronavele moderne pe lng
faptul ca posed un sistem fly-by-wire, mai includ i: magistrala de comunicaie
de date prevazut cu calculator de sistem, circuite de autotestare, redundane
autocomandate i numeroase porturi de conectare a modulelor aparaturii de bord;
precum i ntraga gam de echipamente i aparatur de bord, avnd ieire
numeric adaptat magistralei, dar i comenzi de comunicaie input/output
accesate de diferite calculatoare (de sistem, de navigaie,de trageri).
De remarcat este c se constat un accent deosebit pus pe redotarea i
modernizarea aeronavelor din exploatare, centrul de greutate al interesului trecnd
din sfera performanelor aerodinamice n cea a echiprii cu aparatur electronic
complex, apt s raspund cerinelor impuse de confruntrile moderne .
n continuare vom prezenta cteva din standardele i reglementrile de care
se ine cont n proiectarea i realizarea echipamentelor de nregistrare, la care se
adaug normele generale care reglementeaz echiparea aeronavei i asigurarea
calitii (MIL-Q-9858A, MIL-C-45662, FAR21, FAR 145, etc.).
[8]
TSO-C51a Aircraft Flight Recorder Minimum Performance Standards:
- prevede condiiile mecano-climatice de baz ce trebuie ndeplinite de
unitatea memoriei protejate.
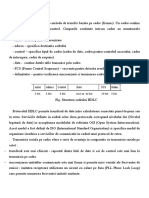
ARINC 717 Flight Data Aquisition and Recordin System:
- stabilete formatul nregistrrilor pe banda magnetic de tip Harward
bifazic;
- prevede ca preluarea final a datelor s se execute doar n format digital;
- stabilete timpii minimi de stocare a datelor;
- compatibilitatea cu avionica integrat.
FAR 121.343 Flight Recorders:
- minimul necesar de parametri nregistrai;
- domeniile de masur;
- precizia minim;
- perioada minim de eantionare.
FAA 21-10 Advisory Cyrcular 21-10:
- impune montarea sondei ultrasonice cu declanare la imersie
NECLASIFICAT
NECLASIFICAT
Pagina 14 din 143
1.4. Clasificarea nregistratoarelor de date
[1]
Aeronavele exploatate n perioada contemporan sunt echipate cu dou
mari clase de nregistratoare de zbor: CVR i FDR .
CVR: Cockpit Voice Recorder nregistrator de voce, memoreaz
semnalele audio, de obicei pe patru canale si anume:
- Convorbirile piloi-controlori de trafic;
- Convorbirile comandat de aeronava-echipaj;
- Convorbirile echipaj-pasageri i/sau zgomotele de fond din cabin;
- Zgomotele exterioare (mediu).
FDR: Flight Data Recorder nregistrator de date de zbor.
Ambele clase de nregistratoare se supun condiiilor specificate de normele
ARINC (condiii mecano-climatice, principii constructive, codificarea datelor).
Clasificarea nregistratoarelor de date de zbor moderne se poate face dup o serie
de criterii obiective:
Dup tipul constructiv:
- nregistratoare analogice - fac parte din prima generaie de
nregistratoare. n scurt timp vor fi scoase total din exploatare ntruct nu
se mai produc la ora actuala.
- nregistratoare digitale - sunt predominante la bordul aeronavelor i
nu se ntrevede nici o perspectiv de nlocuire.
Dup suportul de memorie:
- nregistratoare cu band metalic;
- nregistratoare cu hrtie;
- nregistratoare cu film fotografic;
- nregistratoare cu srm de oel;
- nregistratoare cu band magnetic;
- nregistratoare cu memorii statice;
Dup modul de nscriere a datelor:
- Prin zgriere:
- pe band metalic;
- pe celuloid;
- pe hrtie;
- Prin expunere la lumin a unui film fotografic (SARP);
- Prin nregistrare magnetic:
- pe srm de oel;
- pe band de oel (TESTER);
- pe band magnetic standard (MSRP, Plessey);
- Prin scriere pe memorii statice (Fairchild, LORAL).
Dup modul de realizare a nregistrrii magnetice:
NECLASIFICAT
NECLASIFICAT
Pagina 15 din 143
- nregistrare analogic (impulsuri codificate n distan-MSRP);
- nregistrare digital (Plessey 1684, TESTER).
Dup destinaie:
- nregistratoare normale destinate urmririi i analizei zborurilor de
rutin sau a accidentelor si catastrofelor, motiv pentru care au fost denumite
i nregistratoare de accident;
- nregistratoare pentru ncercri n zbor sunt caracterizate mai ales
printr-o capacitate foarte mare de achiziie i stocare (de ordinul sutelor de
parametri) iar n majoritatea cazurilor exist posibilitatea transmisiei n
timp real pe cale radio la centrele de prelucrare a datelor de la sol. n
general, aceste blocuri de memorie sunt slab protejate.
1.5. nregistratorul digital cu memorii statice
[1]
Categoria cea mai nou de nregistratoare este reprezentat de
nregistratoarele digitale cu memorii statice, acestea conformndu-se
urmtoarelor cerine:
Suportul de memorie: memorii semiconductoare, tip FLASH;
Timp minim de pstrare: 30 de zile;
Capacitatea minim de stocare: 24 de ore de zbor;
Structura constructiv, n dou blocuri principale FDAU (Flight Data
Aquisition Unit-Blocul de achiziie i codificare a datelor) i Memoria protejat;
Blocul memoriei protejate are o configuraie ideal sferic i este vopsit
n portocaliu strlucitor. Acest modul dispune de o baliz ultrasonic care se
activeaz atunci cnd electrolitul din bateria proprie este dizolvat de apa mrii, i
de un emitor radio declanabil la impact;
Sistemul este prevzut cu interfa pentru dischet, datele putnd fi
extrase n mai multe moduri, cum ar fi:
- prin cupla proprie a avionului care de regul este situat sub unul din
plane n cazul aeronavelor militare, i n vecintatea nregistratorului,
n partea posterioara a aeronavei la aeronavele comerciale;
- prin cupla special a blocului de nregistrare n cazul unei catastrofe;
- prin acces direct la memoria semiconductoare n cazul n care blocul
memoriei protejate a suferit avarii semnificative, lucru care se poate
face doar n laboratoare specializate.
Alimentarea DFDR-ului la aeronavele moderne se realizeaz astfel:
- MAIN POWER(modul principal) - 115 V/400 Hz c.a;
- EMERGENCY(avarie) - 28 V c.c.;
- APU(Auxiliary Power Unit) - selectat la nevoie.
NECLASIFICAT
NECLASIFICAT
Pagina 16 din 143
Comutarea pe sursa de rezerv se face n mod automat, prin intermediul
unui releu de tensiune extern, nregistratorul avnd i un comutator automat
intern.
DFDR-ul este ultima instalaie care trebuie s rmn n funciune la
bordul aeronavei.
Figura 1.6. Schema de principiu a unui DFDR
Ultimele tendine n domeniul nregistratoarelor de bord sunt acelea de a
rezolva ct mai mult cu putin din sarcinile rezervate n mod obinuit prii
hardware, prin soft. n cazul echipamentelor moderne, PC-ul este cel care preia
toate sarcinile de decodificare,verificare i respectiv etalonare a informaiilor.
Bloc neprotejat pentru :
Achiziia Prelucrarea Conversia
semnalelor
Bloc protejat pentru
memorie
Traductoare
proprii
Traductoare utilizate
n comun
Echipamente
inteligente
NECLASIFICAT
NECLASIFICAT
Pagina 17 din 143
1.6. Structura fizic i cerinele de rezisten ale nregistratoarelor
Att nregistratorul de date de zbor, cat si nregistratorul vocilor din cabina
piloilor sunt construite din componente similare. Ambele includ o surs de
alimentare, un bloc de memorie, o muf pentru interfa i o baliz de localizare
subacvatic.
Figura 1.7. Prile componente ale nregistratorului
Sursa de alimentare: nregistratoarele de bord dispun de o sursa de
alimentare dual, 115 V/ 400 Hz c.a. sau 28 V c.c. care ofer posibilitatea utilizarii
acestora pe majoritatea aeronavelor. n caz de pierdere a alimentrii de la
aeronav, nregistratorul continu sa funcioneze autonom pe baza unei surse
proprii alcatuit din baterii, 24 V c.c., care sunt proiectate s asigure alimentarea
continu timp de 30 de zile, i care au o perioad de valabilitate de 6 ani.
[7]
Blocul memoriei protejate CSMU (Crash Survivable Memory Unit): este
proiectat sa rein 25 de ore de date de zbor. Informaiile stocate sunt de o foarte
nalt calitate deoarece arta electronic a blocului permite memorarea datelor
ntr-o form necomprimat.
Interfaa cu aeronava: se realizeaz printr-un port care face legtura ntre
nregistrator i blocul de achiziie a datelor.
NECLASIFICAT
NECLASIFICAT
Pagina 18 din 143
Baliza de localizare subacvatic: echipeaz orice nregistrator pentru a
asigura localizarea n eventualitatea unui accident petrecut deasupra apei. Aceasta
se activeaza cnd nregistratorul se scufund, datorit unui electrolit special ce se
dizolv n ap aflat componena bateriei care alimenteaz baliza. Acesta transmite
semnale acustice cu o frecven de 37,5 KHz ce pot fi detectate cu un receptor
special, la adncimi de aproximativ 4200 metri. De asemenea, nregistratoarele
mai pot fi echipate cu emitoare radio activate la impact, pentru o localizare mai
rapid n cazul accidentelor petrecute deasupra suprafeelor terestre.
Figura 1.8. Componentele blocului de memorie protejat
Deoarece protecia datelor n caz de accident este funcia care trebuie
ndeplinit de orice nregistrator de zbor, msurile luate pentru realizarea acestui
lucru sunt drastice i fac din nregistratoare unul din obictele cele mai rezistente
create de om.
Memoria protejat este ncapsulat ntr-o cutie compus din mai multe
straturi:
- carcasa din oel, titan sau un alt material extrem de rezistent;
- blocul de izolaie mpotriva infiltrrilor fluide;
- blocul de protecie termic.
Standardul care reglementeaz cerinele de rezisten impuse
nregistratoarelor este TSO-C51a, i acesta prevede c trebuie sa reziste la:
- o temperatur de 1100
o
C timp de 30 de minute;
- o temperatur de 260
o
C timp de 10 ore;
- un impact de 3400 g timp de 6 secunde. Pentru realizarea acestui scenariu
se lanseaz nregistratorul dintr-un tun;
NECLASIFICAT
NECLASIFICAT
Pagina 19 din 143
- strpungere, pentru realizarea testului este lsat s cad un obiect ascuit
de 225 de kilograme, de la o nlime de aproximativ 3 metri;
- o presiune static de 35*10
6
N/m
2
(350 bari),aplicat timp de 5 minute pe
toate cele 6 fee;
- imersia n fluidele aeronavei (combustibil, ulei, etc.) timp de 48 de ore;
- imersia n ap de mare timp de 30 de zile, la o adncime de 6000 m.
Figura 1.9. FDR n timpul testului la incendiu, i n urma acestuia
Figura 1.10. FDR n timpul testului la imersie/etaneitate
NECLASIFICAT
NECLASIFICAT
Pagina 20 din 143
2. Stabilirea cmpului informaional achiziionat
2.1. Prezentarea informaiilor nregistrate la bord
nregistratoarele au drept funcie principal preluarea i memorarea acelor
parametri care caracterizeaz evoluia avionului n zbor, funcionarea instalaiilor
i a echipamentelor de bord, ct i comenzile aplicate de ctre pilot, cu scopul de
a putea reconstitui caracteristicile de importan deosebit ale zborului efectuat.
n acest sens, echipamentele de nregistrare de la bordul aeronavelor trebuie
s fie capabile s primeasc semnale de la traductoarele montate pe aeronav, pe
care mai apoi s le msoare i s le memoreze n vederea decodificrii cu ajutorul
echipamentelor de sol, care la rndul lor trebuie s prezinte datele decodificate
ntr-o manier ct mai simpl de interpretat.
Pentru a facilita procesul de interpretare a datelor nregistrate, s-au impus o
serie de reglementri cu privire la precizia de nregistrare, domeniile de msur i
ratele de eantionare etc. Tabelul 2.1. ofer informaii referitoare la reglementrile
n vigoare n momentul de fa pentru aeronavele civile.
[1]
Tabelul 2.1.Specificaiile privind parametrii nregistrai de FDR
Parametrul Domeniul de
msur
Precizia
(la senzor)
Rata de
eantionare
(es./sec)
Rezoluia
Timpul absolut 24 ore
0.125%
(pe or)
1/4 1 s
Altitudinea barometric -300 m
+1500 m
100700ft
1
Viteza indicat
Viteza adevarat
tot domeniul
5%
3%
1 0,5 m/s
Unghiul de cap 0360 2 1 0.5
Suprasarcina vertical - 3g
+6 g
1% din
domeniul
maxim
8 0,0004
Unghiul de tangaj - 75
+ 75
2 1, 2, 4 0,5
Unghiul de ruliu - 180
+ 180
2 1, 2 0,5
Taraciune/cuplu/putere
motoare
tot domeniul 2 1 (pe
motor)
0,2%
Acceleraia longitudinal 1g 1.5% din
domeniul
maxim
4 0,004g
NECLASIFICAT
NECLASIFICAT
Pagina 21 din 143
Tabelul 2.1.Continuare
Sistemul de control tangaj tot domeniul 2 2.4 0,2%
Sistemul de control lateral tot domeniul 2 2,4 0,2%
Sistemul de control giratie tot domeniul 2 2 0,2%
Unghiul de bracare prof. tot domeniul 2 2 0,2%
Unghiul de bracare eleroane tot domeniul 2 2,4 0,2%
Unghiul de bracare deriv tot domeniul 2 2,4 0,2%
Acceleraie lateral -1g
+1g
1,5% 2 0,004g
Trimmer profundor tot domeniul 3% 4 0,3%
Poziia manetei de comand
a flapsurilor
toate poziiile 3 1 0,5%
Poziia flapsurilor toate poziiile 3 1/2 0,5%
Poziia manatei de comanda
a reversorului
nainte / in
tranzit / revers
1
Spoiler de frnare
suplimentar
tot domeniul 2 1 , 2 0,2%
Temperatura mediului
ambiant
-50C
+90C
2 2 0,3C
Regimul pilotului automat 1
Altitudinea radio -6m
762m
0,6m sau
3%
1 0,3m
Deviaia laterala 400A 3%
(recomandat)
1 0,3%
Deviaia verticala 400A 3%
(recomandat)
0,3%
Unghiul de atac cf. ech. cf. ech. 1/2, 1, 2 0,3%
Presiunea hidraulic 5% 1/2 0,5%
Viteza fa de sol cf. ech. cf. ech. 1 0,2%
Unghi de deriv cf. ech. cf. ech. 1/4 0,1
Unghiul i viteza vntului cf. ech. cf. ech. 1/4 1
0,3 m/s
Latitudine
Longitudine
cf. ech. cf. ech. 1/4 0.002
Poziia manetei de gaze tot domeniul 2% 1 pt. fiecare
manet
2%
Ali parametrii ai motorului cf. ech. cf. ech. 1 2%
DME 200NM cf. ech. 1/4 1NM
Frecvena selectat Nav 1,2 tot domeniul cf. ech. 1/4
NECLASIFICAT
NECLASIFICAT
Pagina 22 din 143
Tabelul 2.1.Continuare
Altitudine
barometric selectat
tot domeniul 5% 1/64 0,2%
Altitudine selectat tot domeniul 5% 1 30m
Viteza selectat tot domeniul 5% 1 0,5 m/s
Mach selectat tot domeniul 5% 1 0,01
Viteza vertical selectat tot domeniul 5% 1 30 m/min
Cap selectat tot domeniul 5% 1 1
Calea de zbor selectat tot domeniul 5% 1 1
nlimea de decizie
selectat
tot domeniul 5% 1/64 0,3 m
Traciunea comandat tot domeniul 2% 1/2 2%
Traciunea la motor tot domeniul 2% 1/4 2%
Cantitatea de combustibil tot domeniul 5% 1/64 1%
Poziia trimer deriv tot domeniul 3% 1/2 0,3%
Poziia trimer eleron tot domeniul 3% 1/2 0,3%
Presiunea de frnare tot domeniul 5% 1
Unghiul derivei tot domeniul 5% 1 0,5%
Centrul de greutate calculat tot domeniul 5% 1/64 1%
Presiunea hidraulic tot domeniul 5% 1/2 100psi
Control trimer tangaj tot domeniul 2% 1 0,2%
Control trimer ruliu tot domeniul 2% 1 0,2%
Control trimer deriv tot domeniul 2% 1 0,2%
Poziie control flaps tot domeniul 5% 1/2 0,2%
Poziie control volei tot domeniul 5% 1 0,2%
Poziie control spoiler tot domeniul 5% 1 0,2%
Fore pe organele de control
din cabin
tot domeniul 5% 1 0,2%
Semnale discrete (ON/OFF)
Semnalul nregistrat Rata de
eantionare
Observaii
Emisie radio sau
sincronizare cu CVR
1 Este indicat sa existe cate un canal separat
pentru fiecare pilot, dar se accept mixajul
dac se respect condiiile TSO C124a
privind sincronizarea CVR/DFDR
Pilot automat cuplat 1
Radiofar 1 Se accept un singur semnal pentru toate
receptoarele
Avertizor central
(master warning)
1 nregistreaz semnalul Master warning
precum i orice alte semnal rou care nu ar
putea fi detectat pe CVR
NECLASIFICAT
NECLASIFICAT
Pagina 23 din 143
Tabelul 2.1.Continuare
Poziia flapsului 1 Un grup de semnale discrete care s permita
detecia fiecrei poziii fixe, n cazul n care nu
este nregistrata poziia ca semnal continuu
Poziia voletilor 1 Similar cu flapsul
Poziie spoiler 1/2 Grup de semnale discrete, dac parametrul nu
este nregistrat ca semnal continuu
Senzor de compresie a
jambei
4
Lips presiune hidraulic 1/2 Semnal pentru presiune joas, dac parametrul nu
este nregistrat ca semnal continuu
naltime periculoas
(Ground Proximity)
1
Poziia trenului de aterizare 1 - 4
Sistem de avertizare la
angajare (Stick shacker
and pusher)
1 O combinaie corespunzatoare de semnale
discrete
Detecie rafale de vnt
(Windshare)
1
Format display EFIS 1/4 Combinaie corespunzatoare de semnale discrete
care s indice starea i regimul de lucru selectate
(off, normal, defect, pagina selectat etc.)
Format display motoare 1 - 4
Sistem de alertare trafic i
anticoliziune
1
Sistemul primar de
navigatie (GPS, INS, VOR-
DME, MLS, Loran,
Omega)
1 - 4 Combinaie corespunzatoare de semnale discrete
care s permit identificarea
Senzori de givraj 1 - 4
Vibraii motor 1 Cte un semnal pentru fiecare motor i parametru
Supratemperatura motor
Presiune ulei scazut 1
Supraturare motor 1
Apsare pedala de frn 1 Dac nu se nregistreaz fora de apsare ca
parametru analogic
Informaiile achiziionate de nregistratorul de zbor sunt oferite de ctre
traductoarele montate pe aeronav n mare parte sub form de semnale analogice,
dar i sub form de semnale discrete, caracterizate prin domenii de variaie foarte
diverse.
Pentru a trata aceste semnale se impune adoptarea unor forme unice de
semnal cu valori numerice riguros limitate pentru domeniile de variaie.
Standardele cele mai utilizate n acest sens sunt cuprinse n tabelul 2.2.
NECLASIFICAT
NECLASIFICAT
Pagina 24 din 143
Tabelul 2.2. Specificaiile privind semnalele electrice achiziionate de DFDR
TENSIUNI CONTINUE
0 10 V
(05V rar)
Este domeniul de tensiune universal acceptat pentru mediul industrial. Din
acest motiv marea majoritate a circuitelor de conversie numeric respect
aceste valori. Toate nregistratoarele moderne sunt aliniate acestui domeniu
de msur. Traductoarele sunt n general de tip poteniometric, alimentate de
ctre nregistrator.
0 6,3 V Este un domeniu de valori utilizat numai de catre nregistratoarele mai vechi,
n special de productie sovietica.
0 28 V
Este utilizat de catre unele echipamente de bord pentru a-si transmite starea
codificat sub form de nivele de tensiune (de exemplu: pilotul automat,
radioaltimetrul, poziia manetei de gaze). n aceeai categorie dar cu
meniunea c valoarea maxim poate depi (accidental) 32V intra i
tensiunea reelei de bord.
0 40 mV
Sunt semnale furnizate de termocuplele ce masoar temperatura gazelor arse.
Valoarea foarte mic a acestor tensiuni, precum i condiiile speciale de
funcionare necesit masuri deosebite privind preluarea, prelucrarea i
compensarea acestora.
TENSIUNI ALTERNATIVE
0 120 V
(400 Hz)
Corespunde tensiunii de faza (108 V) pentru reeaua energetic de curent
alternativ de bord.
0 40 V
(400 Hz)
Tensiuni alternative generate de unele traductoare selsinice utilizate pentru
transmiterea poziiei unor suprafee de comand, ntr-o schema speciala la
anumite aeronave de producie vestica, de exemplu Boeing 727.
0 100 V
frecven
variabil
Semnal mono sau trifazat furnizat de tahogeneratoarele montate n axul
turbinei. Are att amplitudinea, ct i frecvena proporionale cu turaia.
SEMNALE SELSINICE
Sunt semnale transmise n general de echipamentele ce masoar poziia
aeronavei n spaiu (centrale giroscopice). Sunt utilizate n unele situaii pe
post de traductor unghiular n locul traductoarelor poteniometrice, chiar
pentru game mici n conexiune selsinic normala, sau ca traductor simplu
inductiv.
IMPULSURI CODIFICATE N DURAT
Altitudine
constant
(TTL)
n acesta categorie intra semnalele furnizate de tahogeneratoare, dupa ce n
prealabil au fost transformate n semnale dreptunghiulare, n vederea
msurrii turaiei prin metode numerice.
SEMNALE DISCRETE
Provin n general de la contactele electrice montate pe aeronav pentru a
identifica atingerea unor anumite stari, caz n care au de regula valorile 0/28
V. Pot proveni de asemeni de la diverse echipamente numerice de calcul de
la bord, valorile mai des ntalnite n aceasta situaie fiind 0/5 V (TTL).
SEMNALE NUMERICE
semnal
digital serie
Toate echipamentele numerice de bord realizate actualmente sunt prevazute
cu interfee pentru magistrale seriale tipice n avionica integrat (1553B,
ARINC 429, RS 485, RS 232 etc.)
NECLASIFICAT
NECLASIFICAT
Pagina 25 din 143
2.2. Studiul aparatului de zbor
n vederea ntocmirii lucrrii, ntruct se impune proiectarea unui
nregistrator de zbor pentru un avion supersonic, am ales drept referin aeronava
MiG-29 (cod NATO: Fulcrum), datorit faptului ca este cea mai performant
aeronav supersonic pe care Forele Aeriene Romne au avut-o n nzestrare
pn la momentul de fa, iar acest lucru mi-a facilitat accesul la o serie de
informaii de natur tehnic necesare la realizarea proiectului.
n continuare voi prezenta principalele sisteme ambarcate pe aeronava
aleas fcnd referire la parametrii furnizai de acestea nregistratorului de bord.
[5]
Mikoian-Gurevici MiG-29 este un avion de vntoare cu reacie, din
generaia a patra, proiectat n Uniunea Sovietic pentru a ndeplini rolul unui
avion de superioritate aerian. Avionul a fost dezvoltat n anii 1970 de biroul de
proiectare Mikoian i a fost introdus n dotarea Forelor Aeriene Sovietice n anul
1983. n prezent, se afl n dotarea forelor aeriene a peste 25 de ri.
[9]
MiG-29, alturi de Suhoi Su-27, a fost proiectat pentru a contracara
avioanele de vntoare americane F-15 Eagle i F-16 Fighting Falcon. Avionul
s-a aflat i n dotarea Forelor Aeriene Romne i Forelor Aeriene ale Republicii
Moldova.
Figura 2.1. MiG-29
Tratativele cu Uniunea Sovietic privind achiziionarea unor avioane
MiG-29 au fost demarate la mijlocul anului 1987. Primele patru avioane (dou
NECLASIFICAT
NECLASIFICAT
Pagina 26 din 143
comand simpl i dou dubl comand) au fost livrate la 21 decembrie 1989,
piloii acestora fiind instruii n Uniunea Sovietic. Iniial, 45 de avioane au fost
comandate, ns doar 21 au fost livrate ntre anii 1989-1990 (17 monoloc i 4
biloc). Comanda pentru restul de 24 de avioane a fost ulterior anulat. Avioanele
MiG-29 au fost alocate Regimentului 57 Aviaie Vntoare de la Baza Aerian 57
Mihail Koglniceanu, fiind organizate n escadrilele 157 i 257. n 1994, Romnia
a achiziionat nc un avion MiG-29 din Rusia. n 1992, Romnia a primit un
MiG-29S (Fulcrum-C) din Republica Moldova n schimbul unei datorii de 30
milioane de dolari. n 2002, doar 18 avioane mai erau n dotarea Grupului 57
Aviaie de Vntoare Constantin Bzu Cantacuzino (trei avioane au fost
pierdute n accidente). Dintre acestea, un singur avion monoloc era operaional,
restul avnd resursa de zbor expirat. n luna octombrie a anului 2003, resursa
ultimului MiG-29 a expirat, avioanele fiind conservate i scoase ulterior la
vnzare. Romtehnica nu a vndut nici un avion MiG-29 pn n prezent conform
rapoartelor ONU privind transferurile de armament. Dei au existat planuri pentru
revitalizarea avioanelor, acestea nu au fost luate n considerare, avionul fiind
considerat depit din punct de vedere tehnic. Aerostar Bacu a propus Armatei
Romne modernizarea avioanelor MiG-29, printr-un proiect privat realizat n
colaborare cu DaimlerChrysler AG din Germania (care a modernizat 24 de
avioane MiG-29 ale Luftwaffe la standarde NATO) i Elbit din Israel (implicat
i n modernizarea avioanelor MiG-21 LanceR). Un prototip, denumit MiG-29
Sniper, a fost realizat la standarde de interoperabilitate NATO. Planul nu a fost
implementat, prototipul fiind n prezent expus la Muzeul Aviaiei din Bucureti.
Figura 2.2. Prototipul MiG-29 Sniper
NECLASIFICAT
NECLASIFICAT
Pagina 27 din 143
n serviciul Forelor Aeriene Romne, avionul MiG-29 a fost implicat n
dou accidente. n 1990, dou avioane s-au prbuit n urma unei coliziuni n aer
lng Bneasa. Cei doi piloi i o persoan aflat la sol au murit.Un alt avion
MiG-29UB (dubl comand) s-a prbuit n timpul unei manevre la joas
altitudine, pilotul pierzndu-i viaa.
Echipaj 1 pilot
Anvergur 11,4 m
Suprafa portant 38 m
2
Lungime 17,37 m
nlime 4,73 m
Greutate gol 11000 kg
Greutate maxim la decolare 21000 kg
Vitez maxim (cu postcombustie)
- la mare altitudine
- la joas nlime
2400 km/h (M 2,25)
1500 km/h (M 1,25)
Vitez ascensional 330 m/s (cu postcombustie)
Plafon de serviciu 18000 m
Raz de aciune 1430 km
Distan maxim de zbor (cu 1 RS) 2100 km
Motorizare 2 x Klimov RD-33 MTRDF
Traciune (cu postcombustie) 2 x 8300 kgf
Armament
1 x G-30-1 (unitate de foc 150 proiectile)
3500 kg ncrctur ofensiv A/A sau A/S
Figura 2.3. Caracteristicile tehnico-tactice ale avionului MiG-29
NECLASIFICAT
NECLASIFICAT
Pagina 28 din 143
Motorizare
Motorul RD-33, destinat avioanelor de vntoare, echipeaz aparatul
interceptor supersonic MiG-29, fiind realizat de biroul de proiectare
TUMANSKI. Grupul de for a suferit multiple mbuntiri succesive, ajungnd
astzi unul dintre cele mai bune motoare de aviaie n exploatare, singura mare
deficien rmnnd condiia alimentrii doar cu combustibilii i lichidele
speciale, foarte strict menionate.
RD-33 este un motor turboreactor cu dublu flux (MTRDF) cu amestec de
gaz si aer dup turbin, deci monojet. Primul contur (interior) reprezint un MTR
monorotor. Al doilea contur se realizeaz cu jetul de aer de la ventilator
(n literatura vestic motorul este definit ca turbofan,adic turboventilator).
Principiul de funcionare:
Aerul captat prin prizele ventrale este comprimat de ventilator, dup care
este divizat n dou fluxuri:
- flux exterior, spre camera de amestec;
- flux interior, care intr n compresorul de joas presiune, CJP.
Aerul este comprimat n CJP i apoi n CP (compresorul de nalt
presiune), dup care este transmis la difuzorul camerei de ardere inelare.
Combustibilul injectat n camera de ardere (CA) se aprinde, gazele rezultate
intrnd n turbin. De aici, gazul ajunge n amestecator i n camera de amestec,
unde are loc mixarea cu aerul din circuitul exterior. Din amestector, gazul intr
n difuzorul camerei de foraj. n cazul regimurilor fr foraj, creterea vitezei
gazului are loc n ajutajul de reacie.
Traciunea motorului:
- fr foraj: T = G
T
(C
5
- V
H
);
- cu foraj: T
f
= G
T
[(1+q
combT
)C
sf
- V
H
],
unde: q
combT
debitul total de combustibil;
C
sf
- viteza la ieirea camerei de foraj (CF).
Pri i sisteme ale motorului RD-33
Motorul RD-33 se compune din:
- compresor axial cu 13 trepte:
- 4 trepte CJP;
- 9 trepte CP;
- camer de ardere inelar, direct;
- turbin cu gaze, n dou trepte, cu rcire;
- camera de foraj;
NECLASIFICAT
NECLASIFICAT
Pagina 29 din 143
- ajutaj reactiv reglabil de tip Laval.
Figura 2.4. Schema principial a MTRDF RD-33
Motorul este divizat n 8 module, (conform figurii 2.4.):
1. suflant (ventilator);
2. compresor de nalt presiune (CP);
3. camera de ardere principal;
4. statorul turbinei de nalt presiune (TP);
5. rotorul turbinei de joas presiune (TJP);
6. lagrul posterior al motorului;
7. camera de foraj;
8. cutia agregate motor;
9. ajutajul reactiv;
Funcionarea motorului este asigurat de urmtoarele sisteme:
- Sistemul de combustibil (cu sistem de reglare automat);
- Sistemul de ungere i rcire cu aer;
- Sistemul de pornire;
- Sistemul antipompaj;
- Sistemul antijivraj;
- Sistemul de alimentare cu O
2
a motorului;
- Sistemul de drenaj si scurgere.
Datele tehnice ale motorului:
- debitul de aer: G = 77 kg/s
- grad de comprimare total:
c
= 22
- grad de diluie: Y = 0,549
- grad de destindere total din turbin:
t
= 7,5
- masa motorului: m = 1050 kg
- temperetura n regim maximal: t
4 M
= 810
o
C
- temperatura n regim de foraj: t
4 F
= 820
o
C
NECLASIFICAT
NECLASIFICAT
Pagina 30 din 143
Ansamblul de comand (figura 2.5.) se compune din:
- maneta de gaze RUD;
- pompa regulatoare pentru admisia combustibilului n camera de ardere
NR-59;
- regulator pentru admisia combustibilului n camera de foraj RSF-59;
- transmitorul poziiei manetei de gaze MU-615A;
Figura 2.5. Schema bloc a ansamblului de comand
n continuare voi prezenta cele mai importante elemente ale MTRDF, din
punctul de vedere al DFDR-ului:
- Dispozitivul de admisie: acesta se compune din prizele principale
(ventrale) i cele superioare (n apexul aripii, care lucreaz la decolare/aterizare).
ntruct comanda jaluzelelor superioare se execut automat, sistemul de lucru
(ARU-29) va trimite semnal de bun funcionare la nregistrator.
- Compresorul (CP + CJP): n statorul CJP, n corpul anterior exist trei
traductoare de turaie DCV-2500, care transmit valoarea turaiei CJP la
nregistrator.
- Camera de ardere: pe inelul exterior al difuzorului tubului camerei de
ardere sunt montate traductoarele p
2
* si T
2
, precum si cele de sesizare a
pompajului.
- Turbina (TJP + TP): n corpul exterior al statorului turbinei de joas
presiune este montat traductorul de temperatur T
3
(termocuplu).
- Camera de foraj: n nveliul exterior (partea anterioar) a camerei de
amestec (a CF) sunt motate 12 termocuple pentru masurarea lui T
4
. Pe suprafaa
exterioar a camerei de amestec sunt fixate dou transmitoare de flacr, care
funcioneaz pe principiul ionizrii si semnalizeaz aprinderea n CF.
- Ajutajul: seciunea ajutajului reglabil (de tip Laval supersonic) este
comandat de sistemul automat de reglare BPR-88 automat, sau manual, prin
RUD
RSF-59 NR-59
MU-615
La nregistrator
NECLASIFICAT
NECLASIFICAT
Pagina 31 din 143
maneta de gaze i regulatorul de foraj. Sistemul mecanic de reacie furnizeaz la
ieire semnal poteniometric referitor la poziia voleilor, semnal transmis la
diverse destinaii, printre care i nregistratorul de parametri.
- Sistemul de transmisie al motorului: are drept destinaie transmisia
micrii la agregatele care asigur funcionarea motorului, transmisia micrii la
cutia agregatelor motorului precum si transmisia micrii la cutia agregatelor
avionului KSA. Se compune din: transmisia central, cutia de agregate avion KSA
i cutia agregate motor.
o Cutia agregate motor
Pe cutia agregate motor este montat traductorul frecvenei de rotaie al
CP, tip D-3. De asemenea, sunt montate dou traductoare de turaie
DCV-2500 care transmit frecvena de rotaie la sistemul control.
o Cutia agregate avion (KSA):
Asigur:
-dispunerea i fixarea agregatelor din avion;
-transmite micarea la agregatele avion/motor de la
turbostarter la pornirea avionului;
Dispune de:
-traductor de vibraie MB-27-1;
-traductor de presiune ulei DAT-8;
-buton magnetic cu traductor de pan.
- Sistemul de rcire al motorului: diferenele de presiune sunt sesizate de
o supap diferenial. Se poate aduga un traductor diferenial de presiune cu
ieire poteniometric, n cazul n care se dorete nregistrarea datelor de
funcionare ale acestui sistem.
- Sistemul antijivraj: pe corpul fluxului secundar al motorului, n partea
posterioar, pe nvelisul frezat sunt montate: un traductor al presiunii p
4
i un
pirometru.
- Sistemul de ungere i suflare: n rezervorul de ulei este dispus un
traductor DSMK-8A (nivel ulei).
n agregatul de ulei este dispus semnalizatorul de pan VS-1T care la
apariia impuritilor transmite semnal la nregistrator prin blocul BPK-88.
Controlul sistemului de ungere vizeaz urmtorii parametri:
- Presiunea uleiului la intrarea n motor care se masoar cu traductorul
DAT-8 (montat pe corpul compresorului);
- Temperatura uleiului la ieirea din motor: msurat cu traductorul
P-77 (montat n faa primului radiator de combustibil/ulei, pe conducta lui);
- Prezena pan: se transmite prin VS-1T, montat pe separatorul de ulei
de pe agregatul de ulei.
NECLASIFICAT
NECLASIFICAT
Pagina 32 din 143
Toi aceti parametri constituie informaii preluate de FDR, dispozitivele
menionate trimind semnale i la acesta.
Sistemul de ungere al KSA dispune de traductor de semnalizare a nivelului
de ulei, precum i de termocuplu pentru msurarea temperaturii acestuia.
Cnd vom determina parametrii pe care nregistratorul urmeaz s i preia
n timpul zborului, vom utiliza i informaiile mai sus menionate.
n continuare vom trece n revist echipamentele de bord ale aeronavei,
prezentndu-le pe acelea care au o importan deosebit i care au printre altele i
destinaia de a transmite date la DFDR.
Echipamentele de bord
Interceptorul supersonic MiG-29 dispune de o multitudine de echipamente
ce concur la asigurarea din toate punctele de vedere a zborului, precum i a
misiunilor de lupt. Astfel, avionul este echipat cu:
- Sistemul inerial de curs i vertical T-050;
- Pilotul automat SAU-451-03(04,02);
- Sistemul automat de comand a voleilor ARV-29D(I);
- Sistemul de comand-control combustibilSTR-6-2A;
- Centrala aerodinamic de date SVS-p-72-3-24;
- Calculatorul de bord (radiolocaie i tragere) T-100:2;
- Staia de radionavigaie RADICAL (RSBN) + calculatorul VT-29;
- Radioaltimetrul AF-037;
- Sistemul de ochire S-31;
- Complexul de navigaie ochire 915;
- Radiolocatorul N-019;
- Staia de dirijare LAZUR;
- Staia de rspuns SO-69;
- Sistemul de avertizare la iradiere L-006-DM;
- Sistemul de limitare a unghiului de atac SOS-3;
- Sistemul antiincendiu IS-5NG;
- Sistemul de reglare a raportului de transmisie ARU-29;
- Radiocompasul ARK-19;
- Staia radio R-862;
- Staia de bruiaj 20-SP;
- Sistemul de oxigen KKO-5;
- Sistemul de semnalizare optic VSS;
- Sistemul de comand al motorului BPR-88;
- Mijloace de decolare/aterizare;
- Optolocator (telemetru LASER);
NECLASIFICAT
NECLASIFICAT
Pagina 33 din 143
- Scaun de catapultare K-40;
- Circuite de armament hidraulice,etc.
n plus, aeronava dispune de dou echipamente independente de
diagnosticare-informare defecte/incidente:
- Sistemul de control automat EKRAN;
- Sistemul de avertizare vocal P-951 (Nataa).
Centrala aerodinamic de date SVS
Centrala aerodinamic de date conine receptori aerodinamici,
servodinamici precum i calculatorul propriu. Aceasta msoar presiunea static
(p
s
), presiunea total (p
t
) si temperatura aerului frnat (T
f
).
Centrala SVS afieaz la bord altitudinea relativ (H
r
), viteza adevrat
(v
a
) i numrul Mach (M). De asemenea, realizeaz semnale proporionale cu:
- altitudinea relativ: 0 25000m;
- altitudinea adevrat: -500 +25000;
- viteza indicat: 200 1400 km/h;
- numrul Mach: 0,3 2,5.
Centrala mai furnizeaz i semnalele:
- prezena alimentare central (115V/24V);
- presiunea barometric 760 mm col Hg.
Schema structural a centralei SVS este prezentat n figura 2.6., iar
schema de principiu a modului integrat de lucru n cadrul avionicii n figura 2.7.
BVP-11
Bloc de calcul
parametri
aerodinamici
UV-302
servoaltimetru
UMS-2,5-2
Vitezometru
+ Machmetru
p
s
Sond
p
t
p
0
P97-M
T
f
Prezena alimentare
LAZUR
H
imperativ
sin,cos M
INDEX
INDEX
M
V
imperativ
sin,cos Va
Va
Figura 2.6. Schema structural a centralei aeroinamice de date SVS
NECLASIFICAT
NECLASIFICAT
Pagina 34 din 143
Figura 2.7. Modul integrat de lucru al centralei aerodinamice de date n cadrul
avionicii de bord. Preluarea informaiilor de DFDR
Sistemul de indicare/ comanda-control combustibil STR
Destinaia sistemului STR:
- Msurarea cantitii de combustibil n dou regimuri:
debitmetru/litrometru;
- Calculul i indicarea distanei de zbor funcie de regimul motorului;
- Indicarea cantitii de combustibil/rezervor i semnalizarea terminrii
acestuia;
- Control nivel ulei n cele 2 motoare i n cutia de agregate;
- Control/comanda alimentrii aeronavelor;
- Control nivel lichid hidraulic n sistemul principal i de avarie;
SAU-451
P-591 Nataa RSBN
LAZUR
S-131
SVS
DFDR
27V
Prez.
alim.
M
27V
Prez.
alim.
H
imp
V
imp
H
r
V
a
M
27V
P0=760.
Hr
sin Hr
cos Hr
Ha
cosM
sinM
Vi
sin Va
cos Va
Va
27V
Prez.
alim.
NECLASIFICAT
NECLASIFICAT
Pagina 35 din 143
- Furnizeaz informatii referitoare la regimul debitmetru la 4 sisteme:
- DFDR; - S-31;
- MK-912; - S-069.
- Furnizeaz informatii referitoare la regimul litrometru la 4 sisteme:
- DFDR;
- MK-912;
- S-31.
- Furnizeaz informatii referitoare la procesul curent la MK-9-12.
- Furnizeaz informaii referitoare la rezerva minim de combustibil la 4
sisteme:
- DFDR;
- MK-912;
- VSS;
- Nataa (P-951).
- Furnizeaz informaii referitoare la neconsumarea combustibilului
(pompaj) la 2 sisteme:
- P-951;
- EKRAN.
- Furnizeaz informaii referitoare la rezerva de combustibil la 2 sisteme:
- P-951;
- EKRAN.
Compunerea sistemului STR:
- Transmitor debitmetru: doua, pe magistralele de petrol;
- Transmitor litrometru: trei, rezervoarele 1,2,3;
- Transmitor de nivel rezervor: 10;
- Transmitor temperatur: trei, in rezervoare;
- Pupitru RKI: 6 (comanda/comtrol sistem);
- Pupitru RKI: 2 (comanda alimentrii cu combustibil);
- Bloc calcul/conversie BTV;
- Indicatorul multimod ISTR.
n figura 2.8. este prezentat schema structural a sistemului, precum i
destinaia semnalelor emise de acesta.
NECLASIFICAT
NECLASIFICAT
Pagina 36 din 143
Figura 2.8. Schema structural a sistemului STR
5
4
3
2
2
T2
1
T
S-31
K-36
DFDR
AKRS
KSA
SO-69
RI
EKRAN
BAPS
ISTR-4
SVS
RKI-6
RKI-2
PM-3
BPV
La agregatul
de umplere
3
2
L
I
T
R
O
M
E
T
R
U
1
T1
1
D
E
B
I
T
M
E
T
R
U
1
N
I
V
E
L
1
5
4
3
2
N
I
V
E
L
1
NECLASIFICAT
NECLASIFICAT
Pagina 37 din 143
Sistemul automat de coman a voleilor ARV
Sistemul automat de comand a voleilor ARV-29 este destinat asigurrii
debitului de aer necesa motorului n toate regimurile de funcionare ale acestuia,
eliminrii turbulenelor aerului captat de prizele aerodinamice, precum i
mpiedicrii aspiraiei accidentale a unor corpuri strine de pe pist n timpul
decolrii sau aterizrii.
Comanda voleilor se efectueaz:
- pe canalul principal - automat dup trei programe, funcie de regimul MTR, cu
corecie dup semnalele primite de la bord;
- pe canalul de rezerv - automat, dup aceleai programe printr-o redunda
simpl ;
- dup demnale de la bord - n dou cazuri:
- poziie decolare/aterizare;
- introducere cu avarie volei.
Sistemul efectueaz operaiile menionate mai sus prin comanda verinelor
care acioneaz obturatoarele prizelor de aer principale i secundare (jaluzelele de
pe partea superioar a apexurilor) cum sunt artate n figura 2.9.
Figura 2.9. Dispunerea prizelor de captare a aerului la MiG-29
Sistemul automat de comand a voleilor este compus din:
- Traductoare de: - aer frnat;
- deplasare volei prize superioare;
- turaie compresor MTR;
- Bloc automatic + bloc amplificator;
- Indicator n cabin pentru poziia clinurilor;
- Agregat de comand + distributor hidraulic;
- Verinele T-1 i T-2.
Sistemul lucreaz conform schemei de principiu din figura 2.10., fiind
asistat (controlat) de sistemele EKRAN i P-591 (Nataa). Considerm c este
NECLASIFICAT
NECLASIFICAT
Pagina 38 din 143
necesar, informaia fiind necesar sistemului, ca DFDR-ul s preia un semnal
(comand unic) referitor la poziia prizelor superioare (deschise/nchise).
Figura 2.10. Schema structural de principiu a sistemului ARV
NECLASIFICAT
NECLASIFICAT
Pagina 39 din 143
Sistemul inerial de curs i vertical T-050
Schema bloc de principiu a sistemului T-050 este prezentat mai jos, n
figura 2.11.
Figura 2.11. Schema bloc de principiu a sistemului T-050
Sistemul inerial de curs i vertical T-50 msoar i transmite semnalele
referitoare la:
- tangaj ; - cap de aducere
PR;
- ruliu ; - acceleraiile liniare ale axelor platformei a
,a
,
a
- cap giroscopic
g
;
- vitezele liniare ale axelor platformei v
,v
,
v
.
NECLASIFICAT
NECLASIFICAT
Pagina 40 din 143
Sistemul T-50 este alctuit din:
- Sistem inerial de curs i vertical IKV (bloc principal + bloc rezerv);
- Blocul de comand i legturi BUS-3;
- Blocul de control BK-57;
- Pupitrul de corecie a latitudinii PSK-7;
- Traductor de declinaie magnetic ZMS-3;
- Traductor inductiv ID-6;
- Tablou de semnalizare;
- Comutatoare: - IKV principal/avarie;
- Pregatire de lucru;
- NUK stabilire curs initial;
- Coordonare cap magnetic.
Centrala lucreaz integrat n cadrul avionicii, constituind sursa de
informaii pentru o multitudine de utilizatori de la bord. Complexul T-050 este
asistat (controlat) de sistemele EKRAN si P-591.
nregistratorul de parametri va prelua de la sistemul iniial de curs i
vertical semnale despre: - tangaj ;
- ruliu ;
- cap giroscopic
g
;
Pilotul automat SAU-451
Pilotul automat SAU-451 este destinat mbuntirii stabilitii i
controlabilitii avionului, precum i mririi securitii zborului. Funciunile
ndeplinitie de pilotul automat SAU-451 sunt urmtoarele:
1. Amortizarea oscilaiilor pe cele trei axe: ruliu, tangaj i giraie;
2. Stabilizarea n tangaj la unghiuri mari de atac;
3. Stabilizarea unghiurilor de ruliu, tangaj i giraie;
4. Readucerea la orizontal din orice atitudine a avionului;
5. Stabilizarea nlimii de zbor;
6. Stabilizarea i meninerea capului compas;
7. Aducerea la aterizare (cu sistemul RSBN);
8. Scoaterea peste nlimea periculoas;
9. Realizarea autotestului;
10. Indicarea semnalelor de dirijare la aparatele directoare de navigaie i
pilotaj NPP, KPP, de la produsul 951 (vezi figura 2.12.) la cuplarea acestuia.
Produsul 951 are n componena sa: -Sistemul inerial de cap i vertical;
-centrala aerodinamic de date;
-staia RSBN.
NECLASIFICAT
NECLASIFICAT
Pagina 41 din 143
Figura 2.12. Structura produsului 951
Regimurile pilotului automat sunt:
- Amortizare (DEMPFER);
- Stabilizare (AP);
- Stabilizare nlime;
- Readucere la orizontal (RO);
- Scoatere peste nlimea periculoas;
- Aterizare;
- Traiect i ntoarcere.
Comezile de intrare n aceste regimuri se efectueaz cu ajutorul butoanelor
de pe man pentru regimurile de stabilizare a nlimii, readucere la orizontal i
NECLASIFICAT
NECLASIFICAT
Pagina 42 din 143
scoatere peste nlimea periculoas, si cu ajutorul butoannelor de pe pupitrul de
comand PU-189 din cabin n rest.
Sistemul dispune de urmtoarele elemente:
- Blocul automaticii BU-451;
- Calculatorul MO-87;
- Traductoare de presiune static i dinamic;
- Traductoare de unghi de atac;
- Traductoare de vitez unghiular;
- Transmitor de poziie a manei;
- Elemente de execuie, servomecanismele:
o ARM-150 amortizare tangaj;
o ARM-150 amortizare ruliu;
o ARM-150 amortizare giraie;
o ARM-150-APUS stabilizare longitudinal;
o MT-16-M8 mecanism de trimerare;
o MT-16-M8-A mecanism de trimerare;
- Elemente de conectare, amplificare, etc.
Elementele de reacie de pe mecanismele de execuie vor furniza att
pilotului automat semnale proporionale cu lunngimea tijelor, ct i altor
echipamente-destinaie semnale de stare (starea la un moment dat a mecanismelor
ARM si MT interesnd i nregistratorul).
De la pilotul automat SAU-451, nregistratorul parametrilor de zbor va mai
prelua i informaii referitoare la regimurile de lucru ale acestuia, sub form de
semnal analogic, care va fi memorat ca atare, precum i o comand unic
(cuplare/decuplare sistem).
Din punct de vedere al integrrii pilotului automat SAU-451 n
avionica aparatului MiG-29, figura 2.13. prezint succint modul de dialog al
sistemului cu celelalte echipamente ce concur la rezolvarea sarcinilor de
pilotaj-navigaie / ochire-trageri.
NECLASIFICAT
NECLASIFICAT
Pagina 43 din 143
Figura 2.13. Schema bloc a pilotului automat SAU-451i dialogul cu alte
echipamente
NECLASIFICAT
NECLASIFICAT
Pagina 44 din 143
2.3. Stabilirea parametrilor nregistrai
Parametrii nregistrai de DFDR trebuie sa ofere posibilitatea de a
reconstitui evoluiile i manevrele executate de aeronav, modul n care aceasta a
raspuns la comenzile pilotului i modul n care i-a ndeplinit pilotul misiunea.
O alt categorie de parametri ofer informaii utile n exploatarea aeronavei,
care permit prevenirea unor catastrofe deoarece reflect modul de funcionare al
agregatelor i sistemelor aeronavei att n timpul zborului ct i la sol.
Comenzile unice, starea de funcionare sau nefuncionare a unor
echipamente, cuplarea unor comenzi, avertizri sau defeciuni constituie un alt tip
de parametri nregistrai.
n urma studiului aeronavei, am considerat necesar nregistrarea
parametrilor pe care i voi prezenta mai jos sub form de tabel, separai n funcie
de natura analogic sau digital a semnalelor furnizate de senzori ctre
nregistrator.
Tabelul 2.3. Parametrii analogici nregistrai
Parametrii analogici preluai de DFDR
Nr.crt. Parametru achiziionat Notaie Domeniul de
msur
1. Timpul absolut Time 24 ore
2. Altitudinea barometric H.b -300 18200 m
3. Altitudinea radio H.r 0 10000 m
4. Viteza indicat v.i. 0 2700 km/h
5. Viteza adevrat v.a. 0 2500 km/h
6. Numrul Mach Mach 0 2.5
7. Unghiul de ruliu 180
o
8. Unghiul de tangaj 75
o
9. Unghiul de giraie 0 360
o
10. Unghiul de cap g 0 360
o
11. Unghiul de inciden 0 60
o
12. Unghiul de glisad 0 60
o
13. Suprasarcina axial nx -5 +5 g
14. Suprasarcina lateral ny -5 +5 g
15. Suprasarcina vertical nz -10 +10 g
16. Deplasare man pe ruliu m 8 mm
17. Deplasare man pe tangaj m 8 mm
18. Deplasare palonier m 15 mm
19. Regimul pilotului automat SAU 027 V
20. Bracare stabilizator stnga stab.s 30
o
21. Bracare stabilizator dreapta stab.d 30
o
22. Bracare eleron eler 30
o
NECLASIFICAT
NECLASIFICAT
Pagina 45 din 143
23. Bracare direcie dir 30
o
24. Deplasare maneta de gaze stnga mgst 12mm
25. Deplasare maneta de gaze dreapta mgdr 12mm
26. Volei stnga volst 10mm
27. Volei dreapta voldr 10mm
28. Temperatura ambientului TempA -50 +70
o
C
29. Temperatura T1 stnga T1.st. 0 400
o
C
30. Temperatura T1 dreapta T1.dr. 0 400
o
C
31. Temperatura T3 stnga T3.st. 200 1500
o
C
32. Temperatura T3 dreapta T3.dr. 200 1500
o
C
33. Temperatura T4 stnga T4.st. 400 1900
o
C
34. Temperatura T4 dreapta T4.dr. 400 1900
o
C
35. Turaie CJP dreapta n1.dr. 0 8500 rpm
36. Turaie CJP stnga n1.st. 0 8500 rpm
37. Turaie CP dreapta n2.dr. 0 11300 rpm
38. Turaie CP stnga n2.st. 0 11300 rpm
39. Presiune ulei stnga pu.st. 0 10 bar
40. Presiune ulei dreapta pu.dr. 0 10 bar
41. Presiunea P1 stnga p1.st. 0 8 bar
42. Presiunea P1 dreapta p1.dr. 0 8 bar
43. Presiunea P2 stnga p2.st. 6 13 bar
44. Presiunea P2 dreapta p2.dr. 6 13 bar
45. Presiunea P4 stnga p4.st. 12 17 bar
46. Presiunea P4 dreapta p4.dr. 12 17 bar
47. Vibraii KSA stnga Vbk.st. 0 4 KHz
48. Vibratii KSA dreapta Vbk.dr. 0 4 KHz
49. Vibraii turbin stnga Vbtb.st. 0 4 KHz
50. Vibratii turbin dreapta Vbtb.dr. 0 4 KHz
51. Ajutaj stnga Aj.st. 10mm
52. Ajutaj dreapta Aj.dr. 10mm
53. Tensiune reea c.a. Uca115V 0 130V
54. Tensiune reea c.c. Ucc27V 0 32V
55. Trimmer eleron Trim.el. 10mm
56. Trimmer profundor Trim.pr. 10mm
57. Trimmer tangaj Trim. 10mm
58. Cantitate oxigen O2 0 20 litri
59. Traciune motor stnga T.st. 0 81.3 kN
60. Traciune motor dreapta T.dr. 0 81.3 kN
61. Latitudine Lat. -90 90
o
62. Longitudine Long. -180 180
o
63. Cantitate combustibil Comb. 0 3400 litri
64. Debit combustibil q.comb. 0 68,184 kg/h
NECLASIFICAT
NECLASIFICAT
Pagina 46 din 143
Tabelul 2.4.Comenzi unice preluate de DFDR
Nr.crt. Parametru achiziionat Notaie
1. Pilot automat activ/inactiv SAU
2. nlime periculoas H.crit
3. Rezerva combustibil 550 Kg 550!
4. Incendiu fire!
5. Tren escamotat Esctr
6. Bruiaj jamm.
7. Sistem anticoliziune TCAS
8. Depresurizare cabina Depr.cab.
9. Foraj MTR stnga Fortaj.st.
10. Foraj MTR dreapta Foraj.dr.
11. Apsare pedala de frn Brake
12. Presiune ulei sczut MTR stnga Oil.L.
13. Presiune ulei sczut MTR dreapta Oil.R.
14. Supranclzire MTR stnga Htemp.L.
15. Supranclzire MTR dreapta Htemp.R.
16. Givraj ICE
17. Catapultare Eject
18. Pompaj MTR stnga Pomp.st.
19. Pompaj MTR dreapta Pomp.dr.
20. Tragere tun Gun
21. Lansare rachete Missile
22. Optolocator LSR
23. Iradiere Irad
24. Radiofar Rfar
25. Vibraii MTR stnga Vibr.st.
26. Vibraii MTR dreapta Vibr.dr.
27. Defeciune sistem hidraulic stnga Hidr.fail.st.
28. Defeciune sistem hidraulic dreapta Hidr.fail.dr.
29. Lansare capcane termice FLARE
30. Lansare dipoli /2 CHAFF
31. Detecie rafale de vnt Wind
32. Sistem avertizare la angajare shaker
NECLASIFICAT
NECLASIFICAT
Pagina 47 din 143
3. Stabilirea procesrilor de date aferente nregistrarii de date
3.1. Achiziia semnalelor
Parametrii nregistrai la bordul aeronavelor sunt prezentai sub form de
semnale electrice. Aceste semnale pot mbrca o mare varietate de forme,
depinznd de natura parametrului, clasa de precizie impus, dispozitivul care
furnizeaz informaia, etc. Dup natura continu sau discontinu a domeniului de
definiie i a celui de valori, semnalele pot fi continue n timp, cunoscute i sub
numele de semnale analogice, sau semnale discrete.
Majoritatea semnalelor pot fi descrise prin funcii f(t), definite pentru toate
valorile variabilei continue t. Aceste semnale sunt continue n timp. Daca n plus,
funcia f(t) poate lua pentru un anumit moment de timp, orice valoare ntr-un
domeniu continuu limitat sau infinit, semnalul respectiv este un semnal analogic.
Marea parte a semnalelor sunt n faza iniial analogice, i sunt achiziionate cu
ajutorul senzorilor/traductorilor i convertite n marimi electrice.
Prin traductor se nelege un dispozitiv care realizeaz transformarea unei
mrimi neelectrice ntr-o alt mrime electric, funcionarea sa bazndu-se pe o
lege fizic. Legtura ntre mrimile de intrare i de ieire trebuie sa fie unic i
clar.
n contrast cu semnalele analogice, exist categoria de semnale discrete,
care sunt definite doar pentru valori discrete ale variabilei t. Astfel, variabila t
poate lua valori ntr-un domeniu discret (tk), k fiind un indice ntreg care poate lua
i valori negative. Acest tip de semnale poate descrie starea unui contact electric,
a unei lmpi de semnalizare, etc.
Tendina general actual este de a gsi procedee de integrare a senzorilor
i traductoarelor de bord n configuraii de tip arhitectur deschis, totodat
urmrindu-se soluii de adoptare a protocoalelor de utilizare a acestora la
capacitate maxim, de ct mai multe echipamente beneficiare.
n ceea ce privete DFDR-ul, acesta rmne totui unul din echipamentele
la care se adopt n continuare soluia de dotare cu senzori i traductoare proprii,
alimentai i utilizai exclusiv de acesta, n funcie de limitrile impuse de costuri
i gabarite.
Semnalele primite de ctre DFDR pot fi clasificate astfel:
- Semnale preluate de la traductoarele aparinnd altor echipamente sau
structurii generale de prelucrare a informaiilor;
- Semnale preluate de la traductoarele proprii nregistratorului
- Informaii discrete, de tip comand unic, a crei surs poate fi
reprezentat de o multitudine de echipamente, organe sau sisteme de comand ale
aeronavei.
NECLASIFICAT
NECLASIFICAT
Pagina 48 din 143
n conformitate cu standardele existente, o mprire riguroas a
semnalelor primite de DFDR este urmtoarea:
Figura 3.1. Tipuri de semnale preluate de DFDR
n continuare voi trece n revist traductoarele surse de semnal, pentru a
prezenta principiile de determinare ale parametrilor, poziionarea senzorilor la
bordul aeronavei, precum i tipul de semnalelor de ieire oferite de acestea.
[5]
Pentru nceput, voi prezenta traductoarele care nu aparin DFDR-ului,
grupate n funcie de sistemele de care aparin.
Centrala aerodinamic de date (CAD) SVS poate fruniza la DFDR
semnale analogice n gama 0 5V, reprezentnd urmtoarele informaii:
- nlimea barometric;
- nlimea real (adevrat);
- viteza indicat;
- viteza adevrat;
- numrul Mach.
Sistemul SVS dispune de traductoare de presiune static i dinamic,
traductor al temperaturii aerului frnat, precum i de blocuri de calcul i indicare.
Informaiile primare sunt furnizate sistemului SVS prin intermediul sondei de
presiune (tubul Pitot-Prandtl), precum i din prizele secundare montate pe fuselaj.
NECLASIFICAT
NECLASIFICAT
Pagina 49 din 143
Sonda de presiune respect cerinele tehnologice, de proiectare i
funcionare a tuburilor Pitot-Prandtl, avnd urmtoarele caracteristici:
- Alimentare: 27 2.7V;
- Funcionare optim la un unghi de atac ntre -5 +20
o
i un unghi de
deriv -10 +10
o
;
- Domeniu de temperatur: -60 +90
o
C;
- Masa: 1,35 Kg;
- Semnale de ieire: c.c. 0 273V;
Traductorul temperaturii aerului frnat P-69 echipeaz aeronavele de
lupt din clasa MiG, furniznd semnale aparatelor de bord i sistemelor de pilotaj
i navigaie. Are drept caracteristici:
- Domeniul de temperaturi: -60 +300
o
C;
- Suprasarcina maxim: 10g;
- Semnale de ieire: c.c. 0 273V;
Traductoare rezistive de presiune static i dinamic : sunt construite
dintr-un element sensibil elastic (capsul aneroid) a crui deplasare a centrului
sau rigid se transmite printr-un mecanism cursorului unui divizor poteniometric.
Traductoare inductive: sunt similare celor rezistive, avnd ns
dezavantajul c ieirea lor depinde de variaiile tensiunii i frecvenei de
alimentare, iar impedana bobinei depinde neliniar de mrimea ntrefierului. De
aceea se impune utilizarea lor n sisteme de msur cu compensare proporional
sau integral. Cu ajutorul acestor traductoare se obin informaii referitoare la
altitudinea barometric, viteza indicat, numarul Mach, viteza vertical.
Sistemul SVS dispune de canale de formare a semnalelor proporionale cu
nlimea barometric, nlimea real, viteza indicat, viteza adevrat i numarul
Mach.
Canalul de presiune static (prezentat n figura 3.2.) dispune de un
traductor de presiune format dintr-o capsul aneroid i traductor inductiv cu
deplasarea armturii mobile. Deplasarea capsulei produce modificarea
ntrefierului i apariia la ieire a unor tensiuni proporionale cu amplitudinea
deplasrii i avnd faza n sensul deplasrii traductorului IU. Aceast tensiune
este amplificat de A1, care comand un motor-generator. Generatorul furnizeaz
reacia de vitez pentru amortizarea oscilaiilor. Motorul antreneaz, printr-un
reductor, periile poteniometrelor de pe care se culeg semnalele de ieire. Cama
va aciona un microntreruptor atunci cnd se atinge valoarea de autocontrol pe
canalul de presiune static.
NECLASIFICAT
NECLASIFICAT
Pagina 50 din 143
Figura 3.2. Canalul de presiune static al sistemului SVS
Canalul de presiune dinamic: este prezentat n figura 3.3. de mai jos:
Figura 3.3. Canalul de presiune dinamic al sistemului SVS
n continuare voi prezenta modul de obinere a semnalelor de nime
relativ, vitez adevrat i numar Mach.
Constructiv, canalele sunt foarte asemntoare principiul fiind urmtorul:
semnalul iniial este cules de pe periile a dou poteniometre i este trimis la
modulator. Odat modulat, semnalul este aplicat motorului generator, acesta
antreneaz prin intermediul reductorului cursoarele poteniometrelor calibrate de
pe care se culege semnalul util, peria poteniometrului de reacie care furnizeaz
reacia de poziie la modulator, mecanismul acului indicatorului, precum i rotorul
unui selsin care furnizeaz semnale de sinus i cosinus de informaie la diveri
NECLASIFICAT
NECLASIFICAT
Pagina 51 din 143
consumatori. Genereatorul furnizeaz reacia de vitez care se aplic la intrarea
amplificatorului. Schemele mai dispun de came ce acioneaz la valorile de test
(autotest).
Figura 3.4. Canalul de nlime al sistemului SVS
Figura 3.5. Canalul numrului Mach al sistemului SVS
NECLASIFICAT
NECLASIFICAT
Pagina 52 din 143
Sistemul automat de limitare a unghiului de atac SOS-3: are urmtoarele
funciuni:
- previne pilotul la atingerea unghiului critic
cr
;
- comand ieirea voleilor de bord de atac;
- indic unghiul curent;
- indic suprasarcina curent n
y
;
- furnizeaz semnal de bun funcionare a voleilor de bord de atac.
Sos-3 furnizeaz nregistratorului urmtoarele semnale:
- semnal analogic (c.c.) proporional cu unghiul curent;
- semnal de tip comand unic referitor la utilizarea voleilor de bord de atac.
Sistemul conine o serie de traductoare, dintre care amintim:
- traductorul cursei voleilor de bord de atac MU-04;
- traductorul unghiului de atac DAU.
Traductorul MU-04 furnizeaz sistemului informaii referitoare la poziia
voleilor de bord de atac, informaii care sunt livrate SOS-3 i DFDR-ului. Acesta
din urm preia semnal de tip comand unic, interesnd doar momentele n care
voleii de bord de atac acioneaz.
Traductorul DAU se compune din:
- microntreruptoare finale;
- motor cu reductor pentru acionarea aripioarelor n regim de control;
- elemente de nclzire, cu semnalizoare de bun funcionare;
- poteniometru pentru transmiterea de semnale proporionale cu ;
- transmitor sin-cos, pentru semnale sin,cos;
Schema electric de principiu a traductorului DAU este prezentat n
figura 3.6., informaia fiind obinut prin micarea liber n curentul de aer a
echipamentului mobil (aripioara), acesta modificnd prin intermediul lanului
cinematic poziia cursoarelor poteniometrelor de ieire (semnale n gama
027V).
Figura 3.6. Schema electric de principiu a traductorului DAU
NECLASIFICAT
NECLASIFICAT
Pagina 53 din 143
Prin intermediul acestui traductor, sistemul SOS-3 transmite la DFDR
semnal poteniometric proporional cu unghiul de inciden . Traductoarele din
aceast familie lucrez cu o serie ntreag de echipamente de bord, avnd n
condiii normale erori sub 3.5%.
Caracteristici tehnice:
- gama unghiurilor msurate: -730 33
o
30;
- numr de poteniometre: 4;
- temperaturi de lucru: -60
o
+60
o
C;
- vibraii proprii: f = 5 300 Hz;
- tensiunea la ieire: 27V 10% (R1,R2,R3)
14V 10% (R4);
Sistemul inerial de curs i vertical T-050: poate furniza DFDR-ului
urmtoarele semnale:
- unghiul de tangaj ;
- unghiul de ruliu ;
- unghiul de giraie ;
- capul compas
g
.
Pentru achiziionarea semnalelor unghiulare, nregistratorul utilizeaz
transmisia selsinic pe 5 fire (figura 3.7.), unde x,y,z sunt informaii de faz, H
referina cald, C referina rece.
Figura 3.7. Principiul transmiterii informaiei selsinice
Sistemul dispune alturi de blocurile ineriale IKV (principal i de
rezerv) i de alte dou traductoare: traductorul inductiv ID-3 i traductorul
declinaiei magnetice ZMS-3. Blocurile IKV sunt principial similare centralelor
de cap i vertical vestice, iar n figura 3.8. vom prezenta un model.
NECLASIFICAT
NECLASIFICAT
Pagina 54 din 143
Figura 3.8. Centrala de cap i vertical
Avnd n vedere c sistemul T-050 utilizeaz selsine 3 x 36V/ 400Hz 3f,
iar DFDR este proiectat pentru sistemul vestic 3 x 26V/400HZ 3f, se impune o
adaptare de semnal.
NECLASIFICAT
NECLASIFICAT
Pagina 55 din 143
Pilotul automat SAU-451: dispune de urmtoarele elemente de execuie:
- dou servomecanisme ARM-150M;
- dou servomecanisme ARM-150K;
- un mecanism de efect trimer MT-168;
- un mecanism de efect trimer MT-168a;
Aceste elemente de execuie includ traductoare rezistive liniare de reacie
care furnizeaz informaii referitoare la lungimea tijelor n sistem dar, totodat, i
la DFDR. nregistratorul preia astfel 5 semnale analogice n gama de tensiune
0 10V (c.c.): deplasare tija ARM pe tangaj, ruliu, APUS, si deplasare tija MT
pe tangaj i ruliu.
De asemnea la DFDR ajunge i un semnal analogic n gama 0 10V (c.c.)
de indicare (n trepte de tensiune) a regimului de lucru a pilotului automat:
- DECUPLAT; - ST.+H;
- M+T.T.; - READUCE LA ORIZONTALA;
- M+T.I.; - R.O.+R;
- DEMPFER; - R.O.+H.;
- C.A.; - ST.+C.A.;
- C.A.+T; - D.+T.;
- STABILIZARE; - M+P.A.;
Sistemul SAU-451 mai nglobeaz i alte traductoare, dintre care amintim:
- traductorul de acceleraie liniar DLU-25-04 care msoar acceleraia
liniar (sau suprasarcina) furniznd la ieire semnal de c.c. proporional acu
amplitudinea acceleraiei;
- traductoarele de vitez unghiular DUS care dau la ieire un semnal
proporional cu , care va fi cules de pe poteniometru.
Sistemul de comand a voleilor ARV: livreaz nregistratorului dou
semnale tip comanda unic astfel:
- prize superioare: nivel 1 logic (27V) prizele superioare deschise;
nivel 0 logic (0V) prizele superioare inchise.
- tren escamotat: nivel 1 logic (27V) tren retractat;
nivel 0 logic (0V) tren scos.
Sursa de semnal n primul caz este traductorul DT-13. Acesta este un
ntrerupator sfrit de curs comandat de verinul de acionare a prizelor
secundare. Contactul aplic semnal de 27V spre DFDR la deschiderea prizelor
superioare.
Escamotarea trenului este semnalizat de microntreruptoare tip MU,
unul de semnalizare a presiunii de jamb iar cellalt de validare a escamotrii.
NECLASIFICAT
NECLASIFICAT
Pagina 56 din 143
Blocul de supraveghere i transmitere la distan a parametrilor
motoarelor BPK-88 : furnizeaz la DFDR o serie ntreag de semnale, dup cum
urmeaz:
*semnale analogice:
- temperaturile T
1
, T
3
, T
4
de la cele dou motoare;
- turaiile CP i CJP pentru ambele motoare;
- presiunile P
1
, P
2
, P
4
pentru ambele motoare;
- vibraii turbin ambele motoare;
- volei;
- ajutaj;
- presiune ulei;
*comenzi unice:
- foraj MTR pentru ambele motoare;
- reducere turaie n
2
ambele motoare;
- presiune combustibil.
Sistemul BPK-88 dispune de o gama foarte larg de traductoare, zona
motorului la MiG-29 fiind monitorizat de peste 300 de semnale. ntre cele mai
importante se numr traductoarele de turaie, termocuplele, traductoarele de
factor de compresie, etc. Blocul BPK-88 formeaz i transmite semnale n
sistemul de comand al motorului, n schema electric a avionului, n sistemul de
control i semnalizare al echipajului, n blocul comenzilor verbale precum i la
DFDR.
Succint, modalitatea de furnizare a semnalelor primare este urmtoarea:
*volei/ajutaj: poziia voleilor difuzorului este dat de un traductor
poteniometric de deplasare unghiular, n timp ce un traductor poteniometric
liniar comandat de verinele de acionare a inelelor voleilor difuzorului d
semnalul de confirmare AJUTAJ;
*vibraii: detectoarele de vibraii montate n regiunea motorului i a KSA
furnizeaz informaii poteniometrice de tip LLDC (Low Level DC 020mV);
*temperaturi: termocuplele montate n regiunea motorului i a KSA furnizeaz
informaii poteniometrice de tip LLDC (Low Level DC 020mV);
*presiuni: semnalele de presiune sunt semnale poteniometrice n gama 05V
c.c.;
*reducere turaie: n momentul n care turaia n
2
depete valoarea critic, o dat
cu atenionarea verbala (Nataa), DFDR primete comanda unic sub forma
semnalului de 27V (1 logic);
*foraj: la declanarea postcombustiei DFDR primete comanda unic sub forma
semnalului de 27V (1 logic);
NECLASIFICAT
NECLASIFICAT
Pagina 57 din 143
*presiune combustibil: att timp ct presiunea combustibilului se ncadreaz n
limitele admise, DFDR primete comanda unic sub forma semnalului de 27V
(1 logic);
Semnalizatoarele de temperatur periculoas existente la bordul
aeronavelor din dotare preiau informaia de la termocuple montate n zonele de
interes, semnalul de tensiune generat fiind prelucrat i transformat n comenzi de
afiare/transmitere a datelor obinute.
Ca principiu de lucru, amintim semnlaizatoarele din familia SOT-1M-4
(figura 3.9.), mici diferene tehnologice aprnd la variantele ulterioare.
Tensiunea de ieire variaz de la 052 mV pentru temperaturi ntre 01300
o
C,
pentru termocuple Cromel-Alumel, la 06.8 mV pentru temperaturi ntre 090
o
C,
pentru termocuple Cromel-Copel.
Caracteristici tehnice:
- alimentare: 27 V c.c.;
- eroare maxim 5
o
C;
- informaie primar de temperatur: maxim 60 mV;
- informaie de temperatur la ieire: maxim 27V;
Figura 3.9. Schema de principiu a transmitorului SOT-1M-4
Semnalele de control a tensiunilor de reea de bord : sunt preluate dou
semnale de control a tensiunilor de reea de bord de ctre DFDR:
- tensiune curent alternativ: U c.a. 115V/400Hz 1f;
- tensiune curent continuu: U c.c. 27V;
Semnalul de 115V/400Hz 1f este preluat pe o intrare de 0220V a.c. a
DFDR-ului, iar semnalul de 27V c.c. pe o intrare de 27V d.c. Dac se dorete
achiziia unui semnal de prezen a jivrajului se poate utiliza un semnal unificat
de control al existenei tensiunii n reeaua de bord, de tipul celui prezentat n
NECLASIFICAT
NECLASIFICAT
Pagina 58 din 143
figura 3.10., urmnd ca intrarea astfel disponibilizat a DFDR-ului s primeasc
un nou semnal. O soluie mai elegant este aceea de a proiecta de la bun nceput
DFDR-ul cu o serie de sloturi libere, precum i cu disponibiliti hardware pentru
dezvoltri ulterioare.
Figura 3.10. Formarea semnalului de monitorizare a reelei de bord
n cazul prezenelor celor dou tensiuni (115V i 27V) tranzistorul este
deschis i din colectorul su se culege semnalul dorit.
Subsistemul de combustibil STR : furnizeaz la nregistrator urmtoarele
semnale de tip comand unic:
- Presiune rezervor;
- Rmas 550 Kg;
- Pompaj MTR.
Traductoarele sistemului STR sunt urmtoarele:
Traductor debit TR-TS-30-1: acesta transmite impulsuri de tensiune
proporionale cu cantitatea de petrol care trece (figura 3.11.).
Figura 3.11. Transmitorul debitmetrului
NECLASIFICAT
NECLASIFICAT
Pagina 59 din 143
Traductor de nivel DSMK-10: este alctuit dintr-un corp principal cu mai
multe perechi de contacte poziionate la mai multe nlimi, traductorul dispune
de un magnet permanent care aclaneaz contactele. Semnalizeaz ncepere,
1/2, terminare-consum. Schema este prezentat n figura 3.12.
Figura 3.12. Transmitorul de nivel
Traductor litrometru DT-36-A : transmitorul litrometrului este constituit
de un condensator cilindric cu dou tronsoane: unul de lungime h avnd ca
dielectric combustibilul, i unul de lungime h-m, unde m este nlimea coloanei
de vapori de gaz.
Transmitor de temperatur: sunt constituite din termocuple montate n
zonele de interes ale instalaiei de for a aeronavei, ntr-un numr considerabil,
furniznd informaii n gama semnalelor de nivel mic de c.c. (LLDC).
Gama semnalelor achiziionate de DFDR de la sistemul STR este conform
celor anterior amintite 027 V c.c. . Dintre acestea, un rol deosebit l are semnalul
de avertizare RMAS 550 Kg!, a crui modalitate de formare o prezentm n
figura 3.13..
Figura 3.13. Formarea semnalului de avertizare RMAS 550Kg!
NECLASIFICAT
NECLASIFICAT
Pagina 60 din 143
Radioaltimetrul AF-037: este structurat ca principiu conform figurii
3.14.. Echipamentul este prevzut cu un sistem de filtre introduse n
amplificatorul de band, limea benzii de trecere depinznd de altitudinea
msurat; banda de trecere fiind astfel limitat, erorile aparatului scad.
Semnalul de iesire U(H) este destinat diverselor sisteme de bord care l
necesit, fiind de asemenea preluat de nregistrator cu o rat de eantionare 2/sec
oferind un semnal analogic n gama 027V.
Figura 3.14. Schema structural a unui radioaltimetru
Staia de avertizare iradiere L-006-DM: concretizeaz avertizarea
iradierii aeronavei proprii printr-un semnal de c.c. 27V, care este preluat
nregistrator drept comanda unic IRADIERE.
Sistemul antiincendiu I S-5NG: conine dou blocuri amplificatoare cu 5
canale IS-5MG-1 i ase traductoare de incendiu cu ionizare, cu izolatori ceramici
fixai la 1530 milimetri de masa aparatului, traductori sensibili la flacr.
Semnalul furnizat LLDC este preluat de nregistrator sub forma comenzii
unice INCENDIU.
Sistemul de comand a frnelor aerodinamice: dispune de
microntreruptoarele frnelor aerodinamice D-721T, relee de avarie n instalaia
hidraulic principal ct si n cea secundar.
Aparatul MiG-29 dispune n partea posterioar a fuselajului portant de
dou frne aerodinamice , cu acionare simultan (sus, respectiv jos). Acestea
frunizeaz prin intermediul sistemului la nregistrator, urmtoarele comenzi
unice:FRNE AERODNAMICE- 1 logic la bracare, DEFECTIUNE SISTEM
HIDRAULIC(stnga/dreapta).
Vitezometrul Doppler: care echipeaz aeronava MiG-29 lucreaz integrat
n cadrul avionicii, nregistratorul de parametri putnd astfel s achiziioneze
semnal proporional cu unghiul de deriv de la ieirea blocului de calcul a vitezei
de drum i derivei. DFDR-ul va prelua semnalul analogic unghi de deriv n
ecartul 05V.
NECLASIFICAT
NECLASIFICAT
Pagina 61 din 143
Staia de radionavigaie RADICAL (RSBN): este inclus n structura
sistemului 951, n cadrul cruia lucreaz integrat cu centralele T-050 i SVS.
Aceasta furnizeaz informaii n principal pilotului automat i calculatorului de
bord. Funcionarea staiei este tratat de nregistrator ca eveniment, fiind preluat
un semnal de tip comand unic RSBN, cu 1 logic - 27VDC cnd echipamentul
lucreaz.
Figura 3.15. Schema de principiu a avionicii aeronavei MiG-29
Radiolocatorul N-019: trimite nregistratorului un semnal de tip comand
unic 1 logic - 27VDC n momentul n care se afl n regim de emisie.
Calculatorul sistemului de ochire S-31: gestioneaz semnale de la
numeroase surse (vezi figura 3.15.), avnd n cadrul avionicii rolul de a furniza
date asupra intelor i, n colaborare cu calculatorul de radiolocaie i tragere
T-100:2, de a calcula cursul, traiectoria i momentele de tragere.
Pentru nregistrator, sistemul de ochire S-31 ofer semnalele:
- semnalul de utilizare a telemetrului LASER;
- semnalul de utilizare a staiei 20-SP pentru bruiaj;
- Lansare Rachete;
- Tragere.
Toate aceste semnale sunt de tip comanda unic cu nivelul 1 logic la
27VDC. n cazul ultimelor dou semnale sistemul S-31 valideaz informaia
NECLASIFICAT
NECLASIFICAT
Pagina 62 din 143
primar furnizat de dou microcontacte plasate pe man (la butoanele de
comand a armamentului Lansare, respectiv Tragere tun).
Radiomarkerul: semnalizeaz acustic i vizual pilotul la intrarea
avionului n fasciculul radiobalizei, trimind n acelai timp la DFDR un semnal
de 27 VDC de tip comand unic.
Sistemul de salvare K-40: n cazul extrem al catapultrii, automatica
scaunului K-40 aclaneaz un releu care nchide circuitul comenzii unice
Catapultare. Acest circuit este alimentat chiar de DFDR.
n continuare voi analiza tipurile de traductoare care sunt proprii
nregistratorului. Dup cum am menionat i n capitolele anterioare, n cazul
nregistratoarelor de parametri, se ncearc gsirea unui compromis ntre
necesitatea de a instala pe avion traductoare integrate care s deserveasc mai
muli beneficiari, i soluia optim din punctul de vedere a memorrii informaiei
de a dota DFDR-ul cu maximul posibil de senzori proprii.
n urma analizei avionicii i sistemelor automate de bord, se observ
necesitatea ca nregistratorul s posede traductoare proprii, n scopul achiziionrii
unrmtoarelor semnale:
*semnale analogice: -suprasarcinile axiale, laterale i verticale;
- deplasrile manei pe ruliu i tangaj;
- deplasarea palonierului;
- bracarea stabilizatorului (stnga/dreapta);
- bracarea eleroanelor;
- bracarea direciei;
- deplasarea manetei de gaze (stnga-dreapta).
*comanda unic: -flapsuri.
Traductoarele proprii ale nregistratorului
nregistratorul de date de zbor dispue pentru transmiterea informaiilor
referitoare la poziia manei de traductoare de curs a manei pe canalul de ruliu
i cel de tangaj. Acestea sunt traductoare rezistive (poteniometre liniare
comandate de lanul cinematic al articulaiilor manei), cu semnal de ieire un
curent continuu n ecartul de tensiune 05V.
Pentru Transmiterea informaiilor referitoare la poziia manetelor de gaze,
nregistratorul alimenteaz dou poteniometre liniare ale cror cursoare sunt
deplasate la micarea manetelor de gaze. Aceste traductoare se afl n KSA, pe
lanul cinematic al comenzilor motoarelor.
NECLASIFICAT
NECLASIFICAT
Pagina 63 din 143
Pentru transmiterea semnalelor de suprasarcin nregistratorul
alimenteaz trei traductoare de acceleraie, dispuse n partea din fa a fuselajului
portant.
n cazul n care semnalele preluate de la centrala aerodinamic de date
SVS sunt considerate a avea o precizie nesatisfctoare, se pot utiliza pentru
achiziionarea datelor referitoare la altitudinea barometric i viteza indicat, dou
transmitoare de presiune montate n partea din fa a fuselajului, pe lateralele
carlingii.
nregistratorul de parametri alimenteaz n scopul prelurii informaiilor
referitoare la bracarea suprafeelor de comand aerodinamice o serie de
transmitoare dup cum urmeaz:
- poteniometru stabilizator (stnga-dreapta), montat pe deriva ventral dreapta;
- poteniometru curs palonier, n spatele tabloului de bord n cabin;
- poteniometru bracare direcie, n deriva dorsal stnga;
- ntreruptor de sfrit de curs cu microcontactepentru flapsuri, n bordurile de
fug ale aripii.
Toate transmitoarele proprii sunt alimentate la +5VDC, suportnd
aceleai operaii de etalonri periodice amintite i la traductoarele celorlalte
sisteme. n continuare, voi prezenta pe scurt principiile constructive ale
traductoarelor proprii.
Traductorul de presiune: funcioneaz dup principiul manometrului,
elementul sensibil fiind membrana capsulei. n cazul modificrii presiunii,
membrana se deformeaz, deplasnd prin intermediul unui mecanism peria
poteniometrului la care este aplicat tensiunea de la dispozitivul de acord. De pe
poteniometru, se culege o tensiune proporional cu valoarea msurat i se
aplic la DFDR.
Traductorul de suprasarcin: funcioneaz pe principiul de funcionare al
accelerometrelor, elementul sensibil fiind pe un ax pe care sunt fixate un
poteniometru i un piston, iar fora de reacie fiind constituit de dou arcuri.
Cnd nu exist acceleraii orientate n lungul axei de msurare, ntinderea
arcurilor este uniform, iar masa inerial se afl n poziia suprasarcinii nule.
Dac se imprim o acceleraie n lungul axei de sensibilitate a aparatului, sistemul
mobil se deplaseaz fa de poziia neutr, n acest caz, fora deformrii elastice a
arcurilor imprim masei ineriale o acceleraie absolut egal cu acceleraia n
aciune. Deplasarea masei ineriale provoac o deplasare proporional a
nfurrii poteniometrului fa de peria colectoare de curent, fix. Pentru
amortizarea oscilaiilor se folosete un amortizor lichid.
Schema simplificat de principiu a transmitorului este prezentat n
figura 3.16.
NECLASIFICAT
NECLASIFICAT
Pagina 64 din 143
Figura 3.16. Schema de principiu a transmitorului de suprasarcin
Traductorul de acceleraie unghiular: este utilizat la preluarea
informaiilor de bracare a stabilizatoarelor. Dispozitivul funcioneaz pe
principiul transformrii unghiului de rotaie a axului traductorului n variaie
proporional a rezistenei poteniometrului.
Axul traductorului, cuplat la cursorul poteniometrului este articulat la
stabilizator.Bracarea acestuia provoac o deplasare proporional a periei
colectoare de curent fa de nfurarea fix a poteniometrului. Informaia de
ieire este preluat de nregistrator sub forma unui semnal analogic n gama 05V.
n urma celor prezentate mai sus, se poate observa c etajul de achiziie al
DFDR-ului preia att date numerice, ct i date analogice. Ultima categorie de
date se mparte la rndul su n semnale analogice propriu-zise i n semnale de
tip comand unic. Semnalele analogice pot fi:
- semnale de c.c. n gama 05V;
- semnale de c.c. de nivel mic n gama 020mV;
- semnale de c.a. n gama 0115V, monofazat, 400Hz;
- semnale de c.a. selsinice n gama 026V, trifazat, 400Hz;
- semnale de c.c. n gama 027V, tip comand unic.
Achiziia tensiunilor continue are loc la bordul aeronavelor cu ajutorul
senzorilor i traductoarelor care au drept semnal de ieire, o tensiune continu.n
vederea transformrii acestor tensiuni n informaii numerice, sunt necesare
operaiile de multiplexare, eantionare i cuantizare. nainte de a fi aplicate
multiplexoarelor, avnd n vedere faptul c semnalele de ieire sunt curpinse n
game diferite de valori, trebuie efectuat o ajustare a amplitudinii semnalului
pentru ca la intrarea n circuitul de eantionare, semnalele s fie cuprinse n acelai
domeniu de valori. Astfel, semnalele poteniometrice provenite de la traductoarele
proprii ale nregistratorului, sau de la traductoarele altor sisteme care sunt utilizate
n comun, vor fi amplificate cu un coeficient de amplificare A
k
care poate fi
inclusiv subunitar, coeficient ales n aa fel ncat tot domeniul msurat de
NECLASIFICAT
NECLASIFICAT
Pagina 65 din 143
traductor, s fie inclus n domeniul admis de circuitul de conversie numeric.
Achiziia tensiunilor continue de nivel mic se face de regul de la
termocuple i de la detectoarele de vibraii. Chiar dac n esen semnalele
furnizate sunt tot semnale de curent continuu, gama foarte mic a valorilor astfel
achiziionate impune unele msuri restrictive. Astfel, pentru a aduce valorile n
domeniul de lucru al convertorului analog numeric, se utilizeaz un bloc de
amplificare (vezi figura 3.17.) cu un ctig de circa 200300.
Figura 3.17. Schema amplificrii semnalelor de la termocuple
Astfel de amplificatoare se gsesc n numr foarte mare n industria
electronic, figura de mai sus reprezentnd modul de conectare al chip-ului
INA122 realizat de Texas Instruments, chip pe care l-am folosit i eu n realizarea
practic pe care o voi prezenta ulterior n cadrul lucrrii.
Achiziia semnalelor de curent alternativ este mult mai rar ntlnit
raportat la numrul semnalelor de curent continuu. n cazul semnalelor de curent
alternativ, purttorul informaiei utile poate fi amplitudinea sau frecvena
semnalului, iar n cazul tahogeneratoarelor ambele. Cnd informaia este purtat
de amplitudinea semnalului, pentru msurare i conversia digital se folosesc
redresoare i filtre urmate de conversia numeric a semnalului astfel obinnut pe
canalul obinuit de curent continuu. Pentru cealalt situaie, se utilizeaz alte
scheme de conversie.
Schema de redresare electronic utilizat cu precdere n achiziia
semnalelor de curent alternativ poart numele de redresare fr prag, iar forma
redus a acesteia este prezentat n figura 3.18.
NECLASIFICAT
NECLASIFICAT
Pagina 66 din 143
Figura 3.18. Schema de redresare fr prag
Achiziia semnalelor de tip selsinic reprezint ntr-o oarecare msur un
caz special al semnalelor de curent alternativ, ns prelucrarea acestora se
realizeaz n moduri diferite. Aceste semnale sunt folosite pentru determinarea
unghiurilor de cap, giraie, ruliu i tangaj, sau pentru a achiziiona deplasarea
unghiular a organelor de comand ale avioanelor, dar printr-o conexiune
special, diferit de cea standard.
Figura 3.19. Modaliti de utilizare a selsinelor pentru DFDR
n figura 3.19. sunt prezentate cele dou modaliti de utilizare a selsinelor
n cazul nregistratoarelor de bord pe care le-am menionat mai sus. n primul caz,
dac se aplic o tensiune alternativ sinusoidal pe nfurarea de excitaie, la
apariia unui unghi de decalaj ntre rotor i stator, se obin tensiunile pe cele trei
nfurri ale selsinului:
y
NECLASIFICAT
NECLASIFICAT
Pagina 67 din 143
Pentru situaia prezentat n figura 3.19. b), selsinul este folosit ca un
simplu traductor inductiv, msurn amplitudinea tensiunii dintre terminalele XY.
n acest caz avem:
Conversia semnalului unghiular oferit de prima variant de conectare n
cod numeric, necesit transformarea n prealabil ntr-un semnal format din dou
componente n cuadratur. Transformatorul Scott este circuitul care realizeaz
acest lucru i poate fi regsit n mai multe variante, cea mai simpl fiind utilizarea
unor amplificatoare operaionale care s realizeze diferena u
y
-u
z
.
n urma celor menionate mai sus, putem alctui schema bloc a etajului de
achiziie de date a nregistratorului, pe care o prezentm n figura 3.20.
Figura 3.20. Schema bloc a etajului de achizie i formare a datelor
(3.1.)
(3.2.)
NECLASIFICAT
NECLASIFICAT
Pagina 68 din 143
3.2. Stabilirea ratei de eantionare
Achiziionarea semnalelor care caracterizeaz anumite procese fizice nu
este un scop n sine. Aceste semnale urmeaz a fi prelucrate i pe baza rezultatelor
obinute se regleazprocesul deservit. n cele ce urmeaz vor fi prezentate pe scurt
noiuni ce au un rol major n procesul de prelucrare numeric de semnale:
eantionarea semnalelor, reconstituirea semnalelor din eantioane, precum i
codarea binar. Utilizarea metodelor numerice la prelucrarea semnalelor
analogice necesit discretizarea acestora n timp, fapt ce se realizeaz prin
operaia de eantionare, precum i discretizare n valoare, realizat prin operaia
de cuantizare.
[3]
Presupunnd eantionarea unui semnal analogic s(t) cu pasul (perioada)
de eantionare constant T
e
(figura 3.21.), rezult secvena:
s(k)=s(kT
e
), unde k este un ntreg, - < k < . (3.3.)
Figura 3.21. Semnal eantionat
ntre perioada de eantionare i frecvena de eantionare sau (rata de
eantionare), notat cu f
e
, exist relaia evident:
f
e
=1/T
e
(3.4.)
nlocuirea semnalului s(t) prin eantioanele sale s(kT) se poate face doar
dac pe baza acestora se poate reconstitui semnalul iniial, adic secvena dat de
relaia (3.3) constituie oreprezentare unic a semnalului original. Pentru acesta
trebuie respectate condiiile impuse de teorema eantionrii (Whittaker,
Kotelnikov, Shannon):
Un semnal analogic s(t), care are frecvena ceea mai mare din spectrul su
fmax, poate fi reconstituit n mod unic din eantioanele s(kT) dac:
NECLASIFICAT
NECLASIFICAT
Pagina 69 din 143
f
e
2f
max
(3.5.)
reconstituirea se face utiliznd relaia:
Reprezentarea semnalului prin relaia (3.6.) este valabil numai pentru
semnale aperiodice avnd funcii de band limitat i eantionate suficient de des
nct s fie evitate erorile de aliere. Erorile de aliere apar dac, n urma
eantionrii, semnale analogice diferite vor fi reprezentate n domeniul de
frecven prin aceleai componente spectrale. Pentru a ilustra consecina acestor
erori, n domeniul timp, ar putea fi reconstituite dou semnale sinusoidale diferite,
fiind reprezentate prin acelai eantioane (figura 3.22.).
Figura 3.22. Consecinele erorilor de aliere
De aceea, pentru un circuit de eantionare dat, dac frecvena maxim de
eantionare este limitat din considerente practice, rezult necesitatea limitrii i
a spectrului semnalului analogic n corelaie cu frecvena de eantionare, utiliznd
n acest scop unu filtru antialias (FTJ). Spre exemplu, dup cum rezult din figura
3.22., dac frecvena de eantionare nu este suficient de mare semnalul
reconstituit va diferi esenial de semnalul original.
Eantionarea i reconstituirea semnalelor periodice se face n mod
asemntor, cu unele diferene totui. Se are n vedere faptul c spectrul
semnalului periodic este discret, incluznd o component fundamental i o serie
de componente armonice. Un asemenea spectru rezult prin dezvoltare n serie
Fourier a funciei periodice de timp i nu aplicnd transformata Fourier, ca i n
cazul semnalelor aperiodice.
n aceste condiii i presupunnd c rangul celei mai nalte componente
armonice din spectrul discret este K, teorema eantionrii impune prelevarea a cel
puin 2K+1 eantioane dintr-o perioad pentru ca reconstituirea s se poate face
fr erori. Prin comparaie, rezult c n cazul semnalelor periodice frecvena
minim de eantionare este ceva mai ridicata: 2+1/K eantioane din perioada
(3.6.)
NECLASIFICAT
NECLASIFICAT
Pagina 70 din 143
corespunztoare celei mai nalte componente armonice, fa de 2 eantioane din
perioada componentei cu frecvena maxim din spectrul semnalului aperiodic
(conform relaiei (3.5.)).
Diferena ntre cele dou frecvene minime de eantionare este neglijabil,
n schimb tratarea eantionrii i reconstituirii semnalelor conform teoriei
semnalelor periodice prezint avantaje din punct de vedere aplicativ.
Pe de o parte, spectrul semnalelor periodice fiind discret, este facilitat
procesarea acestuia cu calculatorul numeric; pe de alt parte, exist posibilitatea,
cel puin teoretic, ca n unele situaii s fie satisfcute riguros cerinele teoremei
eantionrii. n cazul semnalelor aperiodice acest lucru nu este cu putin,
deoarece prelucrnd practic semnale de durat limitat, spectrul de frecvene al
acestora este de band infinit. De aceea, n asemenea situaii semnalul aperiodic
de durat limitat este periodizat (lund perioada egal cu durata finit n timp),
dup care procesarea are loc cu constrngerile impuse de teorema eantionrii
funciilor periodice.
Prin reconstituirea unui semnal analogic s(t) se nelege determinarea
formei de variaie n timp a acestuia pe baza eantioanelor s(kTe), care au fost
prelevate n domeniul timp sau pe baza eantioanelor cunoscute n domeniul
frecven (acestea putnd rezulta n urma unui proces de prelucrri de semnale
sau calcul numeric). Secvena reconstituit va conine un numr sporit de
componente fa de secvenele primare, dependent de precizia impus la
reprezentarea lui s(t). n domeniul timp, acest proces de ndesire a eantioanelor
n scopul obinerii semnalului reconstituit se numete interpolare. Alturi de
criteriul obinerii unei precizii ct mai bune a semnalului reconstituit fa de
semnalul original (sau de referin), este de dorit ca interpolarea s se realizeze
ntr-un timp de calcul ct mai scurt.
n principiu calculul numeric al componentelor lips se poate efectua
utiliznd expresia (3.6.), ns reconstituirea prin aceast metod are nevoie de un
numr relativ mare de termeni (teoretic, un numr infinit). Aceast soluie nu este
convenabil din punct de vedere aplicativ, necesitnd o durat relativ mare de
calcul. De aceea, procesul de filtrare ideal, reprezentat de relaia (3.6.), se
nlocuiete printr-o filtrare care aproximeaz funcia de transfer a filtrului ideal.
Metodele de interpolare clasice folosesc funcii de interpolare care au
proprietatea fundamental, ca de altfel i funcia din relaia (3.6.), c n punctele
de eantionare reconstituirea se face fr erori, indiferent de frecvena de
eantionare. Semnalul s*(t) rezultat prin interpolare are deci proprietatea:
s*(kT
e
) = s(kT
e
),pentru k numr natural, (3.7.)
iar s*(t) i s(t) trebuie s difere ct mai puin pentru kT
e
< t < (k +1)T
e
.
Cele mai simple metode de interpolare au la baz dezvoltarea n serie a
numrului s(t).
NECLASIFICAT
NECLASIFICAT
Pagina 71 din 143
s*(t)=s(k
)+
1
1!
(k
)( k
) +
1
2!
(k
)( k
)
2
+ (3.8.)
unde kN, iar s(kT
e
), s'(kT
e
), s''(kT
e
) sunt valorile semnalului s(t) respectiv ale
derivatelor sale de ordin 1,2,..., n punctul kT
e
.
Dac n relaia (3.8.) se reine doar primul termen rezult interpolarea de
ordin 0, sau interpolarea cu reinere:
s* (t) =s(kT
e
) , pentru kT
e
< t < (k +1) T
e
. (3.9.)
Astfel, semnalul reconstituit este format din trepte, valoarea unui eantion
fiind reinut pn la eantionul urmtor (figura 3.23.).
Figura 3.23. Reconstituirea semnalului prin interpolare de ordin 0
Interpolarea cu reinere poate fi realizat cu ajutorul unui circuit de
eantionare i memorare care se gsete n starea de eantionare exact la
momentele kTe, n rest fiind n starea de memorare. Dac n relaia (1.6) se rein
primii doi termeni, rezult interpolarea de ordinul 1:
s*(t)=s(k
)+
1
1!
(k
)( k
), pentru kT
e
< t < (k +1) T
e
. (3.10)
Valoarea primei derivate n momentul de eantionare kTe se aproximeaz
n funcie de valorile eantioanelor s(kT
e
) i s((k +1)T
e
) prin relaia:
s
'
(t)=
s((k+1)T
e
)-s(kT
e
)
T
e
, (3.11.)
n figura 3.24. este exemplificat reconstituirea semnalului prin interpolare
de ordin 1.
NECLASIFICAT
NECLASIFICAT
Pagina 72 din 143
Figura 3.24. Reconstituirea semnalului prin interpolare de ordinul 1
Dup cum rezult din relaia (3.11), datorit faptului c la calculul lui
s(kT
e
) se utilizeaz eantionul curent s(kT
e
) i eantionul urmtor s((k+1)T
e
),
rezult c reconstituirea semnalului este ntrziat cu un interval de timp de durat
T
e
.
Dac s(kT
e
) se exprim n funcie de eantionul actual i eantionul
anterior atunci reconstrucia se face fr ntrziere, realizndu-se o extrapolare.
Pentru ca erorile de reconstituire prin interpolare a semnalelor s fie ct mai mici,
se folosesc interpolri de ordin superior (interpolarea Lagrange, interpolare
spline).
n cadrul procesului de interpolare se poate constata c semnalul
reconstituit depinde n mare msur de relaia de faz dintre semnalul util i pasul
de eantionare, evident necunoscut n procesul reconstituirii (3.25). De aceea, n
cazul instrumentelor virtuale sau a osciloscoapelor numerice, pentru obinerea
unei reproduceri acceptabile a semnalului original, chiar dac se folosesc tehnici
speciale de interpolare, este necesar eantionarea cu o frecven mai mare dect
frecvena Nyquist. Prin frecvena Nyquist se nelege dublul frecvenei maxime
coninute n spectrul semnalului.
Figura 3.25. Relaia dintre faz i pasul de eantionare
NECLASIFICAT
NECLASIFICAT
Pagina 73 din 143
Dac frecvena de eantionare este mai mare de 10 ori dect frecvena
maxim din spectrul semnalului, chiar i interpolarea liniar produce erori sub
5%, care se pot considera deja acceptabile. n consecin, regula nescris de a
preleva 10 eantioane pe o perioad poate fi considerat un fel de standard n cazul
acestor instrumente de msur.
Problema care se observ n mod evident este aceea de a stabili numrul
optim de intrri alocate unui parametru dat, n schema de multiplexare. Avnd n
vedere numrul limitat de intrri i necesitatea de a achiziiona un numr de
parametri ct mai crescut, implic alocarea unui numr mai mic de intrri pentru
fiecare parametru n parte, adic o rat de eantionare mai mic. Ratele de
eantionare mai mici pot conduce la pierderea detaliilor n evoluia parametrilor
cu variaii rapide. Acest lucru ne conduce la ideea c pentru parametrii cu variaii
lente n timp este necesar o rat de eantionare mai mic, pe cnd pentru
parametrii cu viteze da variaie sporite trebuie s realizm rate de eantionare ct
mai mari.
Pentru nregistratoarele de bord, concomitent cu criteriul stabilit de teorema
eantionrii se mai ia n considerare i modul de organizare a informaiei pe
suportul de memorie, capacitatea acesteia, dar i importana parametrilor.
Structura memorrii informaiei se bazeaz pe principii binare, motiv pentru care
ratele de eantionare sunt stabilite ca valori puteri ale lui 2, oprindu-se de regul
la maxim 16 eantioane pe secund.
n urma celor prezentate referitor la stabilirea numrului de eantioane am
decis s aleg ratele de eantionare conform tabelelor 3.1. i 3.2.:
Tabelul 3.1. Ratele de eantionare ale parametrilor analogici nregistrai
Parametrii analogici preluai de DFDR
Nr.crt. Parametru achiziionat Notaie Rata de eantionare
(eantioane/secund)
1. Timpul absolut Time 1
2. Altitudinea barometric H.b 4
3. Altitudinea radio H.r 4
4. Viteza indicat v.i. 2
5. Viteza adevrat v.a. 2
6. Numrul Mach Mach 1
7. Unghiul de ruliu 8
8. Unghiul de tangaj 4
9. Unghiul de giraie 2
10. Unghiul de cap g 2
11. Unghiul de inciden 8
12. Unghiul de glisad 2
13. Suprasarcina axial nx 16
14. Suprasarcina lateral ny 16
15. Suprasarcina vertical nz 16
16. Deplasare man pe ruliu m 8
17. Deplasare man pe tangaj m 8
18. Deplasare palonier m 2
NECLASIFICAT
NECLASIFICAT
Pagina 74 din 143
19. Regimul pilotului automat SAU 16
20. Bracare stabilizator stnga stab.s 8
21. Bracare stabilizator dreapta stab.d 8
22. Bracare eleron eler 8
23. Bracare direcie dir 4
24. Deplasare maneta de gaze stnga mgst 2
25. Deplasare maneta de gaze dreapta mgdr 2
26. Volei stnga volst 2
27. Volei dreapta voldr 2
28. Temperatura ambientului TempA 2
29. Temperatura T1 stnga T1.st. 4
30. Temperatura T1 dreapta T1.dr. 4
31. Temperatura T3 stnga T3.st. 4
32. Temperatura T3 dreapta T3.dr. 4
33. Temperatura T4 stnga T4.st. 4
34. Temperatura T4 dreapta T4.dr. 4
35. Turaie CJP dreapta n1.dr. 4
36. Turaie CJP stnga n1.st. 4
37. Turaie CP dreapta n2.dr. 2
38. Turaie CP stnga n2.st. 2
39. Presiune ulei stnga pu.st. 2
40. Presiune ulei dreapta pu.dr. 2
41. Presiunea P1 stnga p1.st. 2
42. Presiunea P1 dreapta p1.dr. 2
43. Presiunea P2 stnga p2.st. 2
44. Presiunea P2 dreapta p2.dr. 2
45. Presiunea P4 stnga p4.st. 2
46. Presiunea P4 dreapta p4.dr. 2
47. Vibraii KSA stnga Vbk.st. 2
48. Vibratii KSA dreapta Vbk.dr. 2
49. Vibraii turbin stnga Vbtb.st. 2
50. Vibratii turbin dreapta Vbtb.dr. 2
51. Ajutaj stnga Aj.st. 2
52. Ajutaj dreapta Aj.dr. 2
53. Tensiune reea c.a. Uca115V 2
54. Tensiune reea c.c. Ucc27V 2
55. Trimmer eleron Trim.el. 2
56. Trimmer profundor Trim.pr. 2
57. Trimmer tangaj Trim. 2
58. Cantitate oxigen O2 2
59. Traciune motor stnga T.st. 2
60. Traciune motor dreapta T.dr. 2
61. Latitudine Lat. 2
62. Longitudine Long. 2
63. Cantitate combustibil Comb. 2
64. Debit combustibil q.comb. 2
NECLASIFICAT
NECLASIFICAT
Pagina 75 din 143
Tabelul 3.2. Ratele de eantionare ale comenzilor unice preluate de DFDR
Nr.crt. Parametru achiziionat Notaie Rata de eantionare
(eantioane/secund)
1. Pilot automat activ/inactiv SAU 2
2. nlime periculoas H.crit 2
3. Rezerva combustibil 550 Kg 550! 2
4. Incendiu fire! 2
5. Tren escamotat Esctr 2
6. Bruiaj jamm. 2
7. Sistem anticoliziune TCAS 2
8. Depresurizare cabina Depr.cab. 2
9. Foraj MTR stnga Fortaj.st. 2
10. Foraj MTR dreapta Foraj.dr. 2
11. Apsare pedala de frn Brake 2
12. Presiune ulei sczut MTR stnga Oil.L. 2
13. Presiune ulei sczut MTR dreapta Oil.R. 2
14. Supranclzire MTR stnga Htemp.L. 2
15. Supranclzire MTR dreapta Htemp.R. 2
16. Givraj ICE 2
17. Catapultare Eject 2
18. Pompaj MTR stnga Pomp.st. 2
19. Pompaj MTR dreapta Pomp.dr. 2
20. Tragere tun Gun 2
21. Lansare rachete Missile 2
22. Optolocator LSR 2
23. Iradiere Irad 2
24. Radiofar Rfar 2
25. Vibraii MTR stnga Vibr.st. 2
26. Vibraii MTR dreapta Vibr.dr. 2
27. Defeciune sistem hidraulic stnga Hidr.fail.st. 2
28. Defeciune sistem hidraulic dreapta Hidr.fail.dr. 2
29. Lansare capcane termice FLARE 2
30. Lansare dipoli /2 CHAFF 2
31. Detecie rafale de vnt Wind 2
32. Sistem avertizare la angajare shaker 2
NECLASIFICAT
NECLASIFICAT
Pagina 76 din 143
3.3. Multiplexarea semnalelor
Avnd n vedere numarul mare de parametri pe care pe care dorim s-i
memorm, respectiv numrul mare al semnalelor de intrare, se impune utilizarea
unui multiplexor, care poate fi conectat n fluxul de prelucare a semnalelor n
diferite poziii. Astfel, multiplexorul poate fi conectat dup circuitul de conversie
a datelor (vezi figura 3.26.), sau naintea acestuia (vezi figura 3.27.).
Figura 3.26. Multiplexarea ieirilor unui sistem de achiziie de date
Multiplexarea ieirilor convertoarelor analog numerice realizat conform
schemei din figura 3.26. realizeaz viteza de achiziie maxim, ns necesit un
numr maxim de circuite de eantionare/memorare respectiv circuite de
conversie, ceea ce conduce la ridicarea costurilor.
Multiplexarea semnalelor analogice de intrare (figura 3.27.), este ceal mai
des folosit deoarece conduce la un numr minim de circuite relativ scumpe de
eantionare/memorare i conversie. Semnalele de intrare se conecteaz succesiv
la intrarea lanului de conversie analog/numeric, prin multiplexare n timp.
Evoluia n timp a semnalelor este prezentat n figura 3.28. Se consider c
naintea declanrii procesului de achiziie, MUX (multiplexorul) este comnadat
de semnalul M pentru conectarea semnalului U
1
la intrarea in CEM (circuit de
eantionare/memorare), aflat n starea de eantionare.
Declanarea procesului de achiziie se realizeaz la momentul t
1
prin frontul
cztor al semnalului /
, care comand trecerea n stare de memorare a CEM.
NECLASIFICAT
NECLASIFICAT
Pagina 77 din 143
Conversia analog numeric a eantionului prelevat din U
1
este declanat la t
2
de
frontul cresctor al semnalului START CONV. De asemenea, la momentul t
2
se
comut semnalul M de comand al MUX pentru conectarea semnalului U
2
la
intrarea CEM.
Figura 3.27. Multiplexarea semnalelor de intrare analogice
Figura 3.28. Semnalele n sistemele de achiziie de date cu intrari multiple
Sfritul conversiei numerice a eantionului prelevat din semnalul U
1
corespunde lui t
3
, dat de frontul cztor al semnalului STARE CONV, rezultnd
t
3
-t
2
=T
c
(unde T
c
este timpul de conversie).
Comanda de prelevare a unui eantion din semnalul U
2
este dat la t
4
prin
frontul ridictor al lui /
astfel nct t
4
-t
3
= t
ac
, unde t
ac
este timpul de achiziie
al CEM. La momentul t
5
se comand declanarea conversiei analog numerice
corespunztoare eantionului prelevat din U
2
.
n intervalul t
3
-t
5
la ieirile b
0
... b
n-1
ale CAN este ncrcat rezultatul
conversiei numerice a eantionului prelevat din U
1
care este preluat corespunztor
de C (microcontroler). Rezultatul conversiei corespunztoare eantionului
prelevat din U
1
este disponibil ncepnd de la t
6
. Intervalul de timp corespunztor
NECLASIFICAT
NECLASIFICAT
Pagina 78 din 143
achiziiei a cte un eantion din cele k semnale se numete perioada de achiziie
T
ac
=k(t
4
-t
1
).
n cazul nostru, pentru parametrii pe care dorim s i memorm de mai
multe ori ntr-o secund, la intervale egale de timp, va trebui sa legm acelai
semnal la mai multe dintre intrrile multiplexorului, la ploi echidistani.
Astfel, pentru cei 64 de parametri analogici nregistrai, am hotrt s fac
multiplexarea cu ajutorul unor multiplexoare integrate CMOS (Complementary
MetalOxide Semiconductor) pe 256 de adrese. Va rezulta o schem ce va
cuprinde 17 multiplexoare, organizate ntr-o schem piramidal pe care o voi
reprezenta simplificat, n figura 3.29.
Figura 3.29. Schema multiplexrii piramidale
n schema reprezentat n figura 3.29. sunt reprezentate cele 16
multiplexoare primare, fiecare din ele fiind responsabil de selecia unui canal dorit
din totalul de 256. Astfel, fiecare din cele 16 multiplexoare primare primete cele
mai puin semnificative 4 linii de adresare. Multiplexorul secundar este adresat de
cele mai semnificative 4 linii de adresare, i preia ieirile multiplexoarelor
primare. Aceast metod asigur selecia fiecrei linii de intrare a unui
multiplexor primar i aplicarea acesteia la ieire o singur dat. n figura 3.29. se
poate observa cum parametrul n
x
se regsete la 16 intrri echidistante ale
multiplexoarelor, lucru care asigur selcia parametrului dorit de 16 ori, adic rata
sa de eantionare este 16. n mod asemntor se poate observa cum rata de
eantionare pentru parametrii , , v
a
este de 8, 4, respectiv 2 eantioane pe
secund. n tabelul 3.3. voi prezenta modalitatea de alocare a adreselor pentru
parametrul n
x
i reprezentarea binar a acestora.
NECLASIFICAT
NECLASIFICAT
Pagina 79 din 143
Tabelul 3.3.
Pin 7654 3210 Pin 7654 3210 Pin 7654 3210 Pin 7654 3210
0 0000 0000 64 0100 0000 128 1000 0000 192 1100 0000
16 0001 0000 80 0101 0000 144 1001 0000 208 1101 0000
32 0010 0000 96 0110 0000 160 1010 0000 224 1110 0000
48 0011 0000 112 0111 0000 176 1011 0000 240 1111 0000
Cele 32 de comnezi discrete vor fi memorate n 4 cuvinte de cte 8 bii, i
vor fi multiplexate cu ajutorul a 4 multiplexoare 8:1, pe care le voi conecta la
intrrile 63-191, 79-207, 95-223, 111-239.
n continuare, tabelul 3.4. prezint adresele fiecrui parametru:
Tabelul 3.4. Adresele parametrilor n binar pe 8 bii
Nr.
crt.
Adresa
7654 3210 Parametru
Nr.
crt.
Adresa
7654 3210 Parametru
Nr.
crt.
Adresa
7654 3210 Parametru
0 0000 0000 Nx 24 0001 1000 dir 48 0011 0000 Nx
1 0000 0001 Ny 25 0001 1001 T3.dr. 49 0011 0001 Ny
2 0000 0010 Nz 26 0001 1010 n1.st. 50 0011 0010 Nz
3 0000 0011 SAU 27 0001 1011 m 51 0011 0011 SAU
4 0000 0100 28 0001 1100 pu.st. 52 0011 0100 m
5 0000 0101 29 0001 1101 Vbk.st. 53 0011 0101 m
6 0000 0110 stab.s 30 0001 1110 Trim.el. 54 0011 0110 stab.d
7 0000 0111 eler 31 0001 1111 Comb. 55 0011 0111 H.r
8 0000 1000 32 0010 0000 Nx 56 0011 1000 T1.dr.
9 0000 1001 T3.st. 33 0010 0001 Ny 57 0011 1001 T4.dr.
10 0000 1010 n1.dr. 34 0010 0010 Nz 58 0011 1010 v.a.
11 0000 1011 35 0010 0011 SAU 59 0011 1011 mgdr
12 0000 1100 n2.st. 36 0010 0100 60 0011 1100 p1.st.
13 0000 1101 p4.dr. 37 0010 0101 61 0011 1101 Vbtb.st.
14 0000 1110 Ucc27V 38 0010 0110 stab.s 62 0011 1110 Trim.
15 0000 1111 Long. 39 0010 0111 eler 63 0011 1111 8B-1
16 0001 0000 Nx 40 0010 1000 T1.st. 64 0100 0000 Nx
17 0001 0001 Ny 41 0010 1001 T4.st. 65 0100 0001 Ny
18 0001 0010 Nz 42 0010 1010 v.i. 66 0100 0010 Nz
19 0001 0011 SAU 43 0010 1011 mgst 67 0100 0011 SAU
20 0001 0100 m 44 0010 1100 pu.dr. 68 0100 0100
21 0001 0101 m 45 0010 1101 Vbk.dr. 69 0100 0101
22 0001 0110 stab.d 46 0010 1110 Trim.pr. 70 0100 0110 stab.s
23 0001 0111 H.b 47 0010 1111 q.comb. 71 0100 0111 eler
NECLASIFICAT
NECLASIFICAT
Pagina 80 din 143
Continuare Tabelul 3.4. Adresele parametrilor n binar pe 8 bii
Nr.
crt.
Adresa
7654 3210 Parametru
Nr.
crt.
Adresa
7654 3210 Parametru
Nr.
crt.
Adresa
7654 3210 Parametru
72 01001000 113 01110001 Ny 154 10011010 n1.st.
73 01001001 T3.st. 114 01110010 Nz 155 10011011 m
74 01001010 n1.dr. 115 01110011 SAU 156 10011100 pu.st.
75 01001011 volst 116 01110100 m 157 10011101 Vbk.st.
76 01001100 p1.dr. 117 01110101 m 158 10011110 Trim.el.
77 01001101 Vbtb.dr. 118 01110110 stab.d 159 10011111 Comb.
78 01001110 O2 119 01110111 H.r 160 10100000 Nx
79 01001111 8B-2 120 01111000 T1.dr. 161 10100001 Ny
80 01010000 Nx 121 01111001 T4.dr. 162 10100010 Nz
81 01010001 Ny 122 01111010 g 163 10100011 SAU
82 01010010 Nz 123 01111011 n2.dr. 164 10100100
83 01010011 SAU 124 01111100 p4.st. 165 10100101
84 01010100 m 125 01111101 Uca115V 166 10100110 stab.s
85 01010101 m 126 01111110 Lat. 167 10100111 eler
86 01010110 stab.d 127 01111111 Time 168 10101000 T1.st.
87 01010111 H.b 128 10000000 Nx 169 10101001 T4.st.
88 01011000 dir 129 10000001 Ny 170 10101010 v.i.
89 01011001 T3.dr. 130 10000010 Nz 171 10101011 mgst
90 01011010 n1.st. 131 10000011 SAU 172 10101100 pu.dr.
91 01011011 voldr 132 10000100 173 10101101 Vbk.dr.
92 01011100 p2.st. 133 10000101 174 10101110 Trim.pr.
93 01011101 Aj.st. 134 10000110 stab.s 175 10101111 q.comb.
94 01011110 T.st. 135 10000111 eler 176 10110000 Nx
95 01011111 8B-3 136 10001000 177 10110001 Ny
96 01100000 Nx 137 10001001 T3.st. 178 10110010 Nz
97 01100001 Ny 138 10001010 n1.dr. 179 10110011 SAU
98 01100010 Nz 139 10001011 180 10110100 m
99 01100011 SAU 140 10001100 n2.st. 181 10110101 m
100 01100100 141 10001101 p4.dr. 182 10110110 stab.d
101 01100101 142 10001110 Ucc27V 183 10110111 H.r
102 01100110 stab.s 143 10001111 Long. 184 10111000 T1.dr.
103 01100111 eler 144 10010000 Nx 185 10111001 T4.dr.
104 01101000 T1.st. 145 10010001 Ny 186 10111010 v.a.
105 01101001 T4.st. 146 10010010 Nz 187 10111011 mgdr
106 01101010 147 10010011 SAU 188 10111100 p1.st.
107 01101011 TempA 148 10010100 m 189 10111101 Vbtb.st.
108 01101100 p2.dr. 149 10010101 m 190 10111110 Trim.
109 01101101 Aj.dr. 150 10010110 stab.d 191 10111111 8B-1
110 01101110 T.dr. 151 10010111 H.b 192 11000000 Nx
111 01101111 8B-4 152 10011000 dir 193 11000001 Ny
112 01110000 Nx 153 10011001 T3.dr. 194 11000010 Nz
NECLASIFICAT
NECLASIFICAT
Pagina 81 din 143
Continuare Tabelul 3.4. Adresele parametrilor n binar pe 8 bii
Nr.
crt.
Adresa
7654 3210 Parametru
Nr.
crt.
Adresa
7654 3210 Parametru
Nr.
crt.
Adresa
7654 3210 Parametru
195 11000011 SAU 216 11011000 dir 237 11101101 Aj.dr.
196 11000100 217 11011001 T3.dr. 238 11101110 T.dr.
197 11000101 218 11011010 n1.st. 239 11101111 8B-4
198 11000110 stab.s 219 11011011 voldr 240 11110000 Nx
199 11000111 eler 220 11011100 p2.st. 241 11110001 Ny
200 11001000 221 11011101 Aj.st. 242 11110010 Nz
201 11001001 T3.st. 222 11011110 T.st. 243 11110011 SAU
202 11001010 n1.dr. 223 11011111 8B-3 244 11110100 m
203 11001011 volst 224 11100000 Nx 245 11110101 m
204 11001100 p1.dr. 225 11100001 Ny 246 11110110 stab.d
205 11001101 Vbtb.dr. 226 11100010 Nz 247 11110111 H.r
206 11001110 O2 227 11100011 SAU 248 11111000 T1.dr.
207 11001111 8B-2 228 11100100 249 11111001 T4.dr.
208 11010000 Nx 229 11100101 250 11111010 g
209 11010001 Ny 230 11100110 stab.s 251 11111011 n2.dr.
210 11010010 Nz 231 11100111 eler 252 11111100 p4.st.
211 11010011 SAU 232 11101000 T1.st. 253 11111101 Uca115V
212 11010100 m 233 11101001 T4.st. 254 11111110 Lat.
213 11010101 m 234 11101010 255 11111111 Mach
214 11010110 stab.d 235 11101011 TempA
215 11010111 H.b 236 11101100 p2.dr.
3.4. Circuite de eantionare-memorare (SH)
Circuitele de eantionare-memorare realizeaz eantionarea, iar
convertoarele analog-digitale conectate la ieirea acestora asigur cuantizarea i
codarea.
Un circuit de eantionare-memorare (Sample and Hold SH) realizeaz
prelevarea la intervale de timp egale sau aleatoare, a unor eantioane de
amplitudine din semnalul analogic aplicat la intrare i memorarea acestora pe
durata conversiei analog-digitale.
[3]
Schema de principiu a unui circuit de eantionare-memorare este
reprezentat n figura 3.30.
Fig. 3.30. Schema de principiu a unui circuit de eantionare-memorare
NECLASIFICAT
NECLASIFICAT
Pagina 82 din 143
n starea de eantionare (notat S), comutatorul electronic CE este nchis,
comandat prin nivelul logic "0" al semnalului de comand S/H. Condensatorul C
se ncarc rapid, tensiunea la bornele sale urmrind variaia n timp a lui u
i
.
Frontul cresctor al semnalului de comand S/H, la trecerea din starea "0"
n starea "1" determin deschiderea comutatorului electronic CE i memorarea
valorii tensiunii de intrare u
i
, de la momentul corespunztor frontului (stare H, de
memorare). Aceast valoare a tensiunii de intrare este meninut la ieirea
circuitului de eantionare-memorare n intervalul de timp corespunztor strii de
memorare, impus prin nivelul logic "1" al semnalului de comand S/H. Acest
interval trebuie s fie egal sau mai mare dect timpul de conversie impus de tipul
convertorului analog digital. De obicei revenirea n starea "0" pentru prelevarea
urmtorului eantion se face n urma primirii unui semnal de la convertorul ADC
care indic sfritul conversiei.
Amplificatoarele operaionale AO
1
i AO
2
lucreaz n regim de repetor de
tensiune. Astfel, amplificatorul de intrare AO
1
asigur o impedan de intrare mare
pentru a nu perturba circuitul de msurare i o impedan de ieire mic pentru
ncrcarea rapid a condensatorului C n starea de eantionare, ceea ce conduce la
un timp de achiziie redus. Constanta de timp de ncrcare a condensatorului este:
( )C r r
c o i
+ = t (3.12.)
unde r
o
reprezint rezistena de ieire a AO
1
, iar r
c
- rezistena n conducie a
comutatorului CE. Amplificatorul de ieire AO
2
este un AO cu impedan mare de
intrare (de exemplu cu tranzistoare cu efect de cmp n circuitul de intrare), ceea
ce conduce la o descrcare foarte lent a condensatorului C n starea de memorare
i deci la o vitez de alterare redus a tensiunii.
n cele ce urmeaz se prezint caracteristicile unui circuit de eantionare-
memorare n corelaie cu procesul de achiziie de date (figura 3.31.).
Tranziiile circuitului de eantionare-memorare (SH) dintr-o stare n alta
sunt nsoite de ntrzieri apreciate prin timpul de apertur i timpul de achiziie.
Fig. 3.31. Variaia tensiunilor la un circuit de eantionare-memorare
NECLASIFICAT
NECLASIFICAT
Pagina 83 din 143
Timpul de apertur t
ap
reprezint intervalul de timp ntre frontul de
comand a strii de memorare i comutarea efectiv a circuitului, adic nceputul
procesului de stabilizare a tensiunii de ieire.
Instabilitatea timpului de apertur ("aperture uncertainty" sau "aperture
jitter") reprezint limita maxim a variaiilor aleatoare ale timpului de apertur
(Dt
ap
).
Timpul de apertur depinde de circuitele digitale din schema de comand
i ia valori ntre 2200 ns. Instabilitatea timpului de apertur Dt
ap
este, de regul,
sub 1% din t
ap
.
Existena timpului de apertur la tranziia din starea de eantionare n starea
de memorare, conduce la o eroare de apertur, deoarece semnalul de la ieirea
circuitului nu rmne la valoarea avut la intrare n momentul tranziiei SH, ci
urmrete intrarea nc un interval de timp. Aceast eroare nu ar deranja dac
timpul de apertur ar avea o valoare constant. Evitarea acestei erori s-ar putea
face prin comanda anticipat a tranziiei SH cu t
ap
. n schimb, instabilitatea
timpului de apertur introduce erori care nu pot fi eliminate i a cror limit
maxim este dat de relaia:
ap
i
t
dt
du
A =
max
max
c , (3.13.)
unde
max
dt
du
i
reprezint panta maxim a semnalului de intrare u
i
.
n procesul de achiziie eroarea maxim e
max
trebuie s satisfac condiia:
LSB
2
1
max
s c , (3.14.)
n care mrimea LSB reprezint bitul de semnificaie minim al convertorului
analog-digital conectat la ieirea SH.
Se observ din relaiile (3.13.) i (3.14.) c instabilitatea timpului de
apertur limiteaz superior domeniul de frecvene al semnalului de intrare u
i
,
pentru un convertor de rezoluie dat. Se poate stabili o frecven limit n cazul
unui semnal de intrare sinusoidal, de forma:
t U u
i i
e sin
max
= (3.15.)
Viteza maxim de variaie a acestui semnal este:
max
max
i
i
U
dt
du
e = (3.16.)
astfel nct inegalitatea (3.22) capt forma:
ap
n i
t
U
U
A
s
2
max
max
e , (3.18.)
unde
n
U
2
max
reprezint rezoluia convertorului, egal cu 1 LSB (n este numrul de
bii ai codului binar la ieirea convertorului, iar U
max
domeniul de variaie maxim
al tensiunii la intrarea convertorului / FS - Full Scale).
NECLASIFICAT
NECLASIFICAT
Pagina 84 din 143
Viteza maxim de variaie a semnalului de intrare se obine pentru
U
i max
= U
max
. Rezult, deci:
ap
n
t
f
A
s
+1
2
1
t
(3.19.)
Timpul de stabilizare - t
s
- la comutarea SH n starea de memorare reprezint
intervalul de timp ntre momentul n care ia sfrit timpul de apertur i momentul
reducerii amplitudinii oscilaiilor tranzitorii ale tensiunii de la ieire SH sub o
limit admis (1/2 LSB).
Timpul de achiziie t
ac
reprezint intervalul de timp ntre frontul de comand
a strii de eantionare i momentul n care ieirea urmrete tensiunea de intrare
cu o eroare mai mic de 1/2 LSB. Acest timp apare datorit vitezei limitate de
variaie a tensiunii de la ieirea SH precum i a procesului oscilatoriu premergtor
stabilizrii acestei tensiuni. Timpul de achiziie reprezint o caracteristic
important a SH care limiteaz n procesul de achiziie frecvena de eantionare.
Acest timp depinde de capacitatea de memorare (crete cu valoarea lui C) i ia
valori de la 15 ns n sus, de regul ntre 1-6ms. Limea impulsului de eantionare
trebuie s fie mai mare dect t
ac
, ca prelevarea s se fac corect.
Modificarea tensiunii u
e
de la ieirea SH n starea de memorare este
caracterizat prin panta de variaie a acestuia t u
e
A A , numit vitez de alterare
(invers proporional cu capacitatea de memorare - rel. (3.26)). Ea este de ordinul
0.1 1 s V ( ms mV ). Cnd comutatorul este deschis, tensiunea la bornele
condensatorului se modific datorit curentului de polarizare I
B
al AO
2
, a
curentului I
d
prin dielectricul condensatorului i a curentului I
c
prin comutatorul
CE, n conformitate cu relaia:
( )
d B c
e
I I I
C dt
du
+ =
1
(3.20.)
termenul dominant fiind I
B
.
Creterea valorii capacitii condensatorului de memorare conduce la
scderea vitezei de alterare a tensiunii de ieire n starea de memorare, dar i la
creterea timpului de achiziie.
Pentru reducerea influenei curentului I
d
se folosesc condensatoare cu
dieiectric de foarte bun calitate (teflon, polistiren etc.) iar pentru reducerea
influenei curentului de polarizare I
B
se utilizeaz schema mbuntit
reprezentat n figura 3.32.
Fig. 3.32. Schema mbuntit a unui circuit de eantionare-memorare
NECLASIFICAT
NECLASIFICAT
Pagina 85 din 143
La eantionare comutatoarele CE
1
i CE
2
sunt nchise, circuitul funcionnd
ca n varianta anterioar. Pentru memorare CE
1
i CE
2
se deschid. Admind c
cele dou condensatoare C sunt parcurse de cureni egali I
B
-
= I
B
+
i neglijnd I
c
i I
d
, modificarea tensiunii de ieire va fi:
( ) 0
1
= ~
+
B B
e
I I
C dt
du
, (3.21.)
deci tensiunea u
e
se menine constant.
n realitate, cei doi cureni difer prin curentul de decalaj (offset) I
D
i
D
e
I
C dt
du 1
~ . (3.22.)
Alterarea tensiunii de la ieirea SH n starea de memorare pn n momentul
terminrii conversiei analog-digitale, trebuie s fie mai mic dect 1/2 LSB.
Schemele prezentate n figurile 3.31. i 3.32. sunt caracterizate i de erori
datorate amplificatoarelor plasate n cascad; n particular eroarea datorat
tensiunii de decalaj (offset) se adun.
Reducerea erorilor de decalaj se poate obine prin includerea celor dou
amplificatoare operaionale AO
1
iAO
2
ntr-o bucl de reacie global (fig. 3.33).
n starea de eantionare, bucla global de reacie accelereaz ncrcarea
condensatorului C, deoarece rezistena serie a comutatorului CE este redus
drastic i astfel timpul de achiziie se micoreaz substanial.
Fig. 3.33. Schema de principiu a unui circuit de eantionare-memorare cu
reacie global
La starea de memorare, cele dou amplificatoare lucreaz separat n configuraii
de repetoare, rezistena R prelund diferena de tensiune dintre ieire i intrare.
O alt structur de SH, mult utilizat, este reprezentat n figura 3.34.
Fig. 3.34. Circuit de eantionare-memorare cu integrator
Aici condensatorul de memorare este conectat n circuitul de reacie al AO
2
,
care mpreun cu R
1
formeaz un integrator. Circuitul poate oferi o amplificare n
NECLASIFICAT
NECLASIFICAT
Pagina 86 din 143
tensiune supraunitar, cu schimbarea fazei. Cnd comutatorul CE este nchis
(starea de eantionare) AO
2
are nc o reacie negativ prin R
2
. Tensiunea de ieire
tinde spre
i
u
R
R
1
2
cu o constant de timp C R
2 1
= t . Din momentul deschiderii
comutatorului CE tensiunea pe condensator i tensiunea de ieire rmn
neschimbate. Integratorul a trecut n starea de memorare. Alegnd un condensator
de bun calitate i compensnd corect curentul de polarizare, se poate reduce
considerabil scderea tensiunii u
e
n starea de memorare.
Circuitele de eantionare-memorare se produc ntr-o mare varietate sub
forma unor circuite integrate hibride sau monolitice. De obicei, condensatorul de
memorare este conectat n exterior. La varianta din figura 3.34., condensatorul
poate fi integrat pe cip, existnd posibilitatea de a conecta n paralel cu acesta i
un condensator extern.
n ultimul timp se realizeaz sub form integrat convertoare
analog-digitale care conin pe acelai cip i circuitul de eantionare-memorare
(ex. AD7579/AD 7580).
3.5. Cuantizarea semnalelor
Cuantizarea nseamn reprezentarea sub form numeric a eantioanetor
unui semnal analogic, prin atribuirea acestor eantioane a unor valori numerice
discrete (stabilind astfel o coresponden ntre numrul infinit de valori posibile
ale unui eantion i numrul finit de valori discrete).
[3]
Cuantizarea reclam mprirea plajei maxime de variaie a semnalului de
intrare ntr-un numr N de nivele (trepte) egale ntre ele, notate cu q, numit pas de
cuantizare sau cuant. De obicei se ia N = 2
n
, n fiind un numr ntreg pozitiv.
Dac plaja maxim de variaie a semnalului de intrare este 0 ... X
max
,, pasul de
cuantizare va fi:
n
X
q
2
max
= (3.23.)
n cazul cnd pasul de cuantizare este constant i independent de valoarea
semnalului, cuantizarea este uniform (fig.3.35).
Dac nu depete jumtatea intervalului (adic ( )
2
1 2
q
i + ), valoarea
eantionului cuprins ntre nivelele iq i (i + 1)q este asociat nivelului iq iar dac
depete jumtatea acestui interval, nivelului (i+1)q. Astfel, eantionului k-1 din
figura 3.35. i se atribuie valoarea iq iar eantionului k, valoarea (i + 1)q.
La unele cuantizoare, dac semnalul depete nivelul iq, i se atribuie
valoarea (i + 1)q.
n figura 3.36. a este reprezentat caracteristica intrare-ieire a unui cuantizor.
NECLASIFICAT
NECLASIFICAT
Pagina 87 din 143
Fig. 3.35. Cuantizarea uniform
Fig. 3.36. a)Cuantizarea uniform i b) eroarea corespunztoare
Diferena dintre valorile semnalului de ieire i de intrare ale cuantizorului, adic:
( ) ( ) t x t x
q
= c (3.24.)
se numete eroare sau zgomot de cuantizare i reprezint eroarea pe care o
introduce cuantizorul. Se constat c:
2
q
= c (3.25.)
Analiznd figura 3.36.b se observ c, cu ct pasul de cuantizare q este mai
mic, deci numrul N de niveluri de cuantizare este mai mare, zgomotul de
cuantizare este mai mic i deci semnalul cuantizat este o reprezentare mai fidel
a semnalului x(t).
Parametrul care poate aprecia gradul de distorsiune pe care semnalele le
sufer n procesul de cuantizare este raportul semnat-zgomot de cuantizare.
Procedeul de cuantizare uniform prezentat mai sus are dezavantajul c
raportul semnal-zgomot depinde de amplitudinea eantionului. Pentru a obine un
raport constant la o dinamic mare a semnalului se poate face o cuantizare, n care
pasul q
i
urmeaz o lege logaritmic de forma:
1 log a q
i
= (3.26.)
NECLASIFICAT
NECLASIFICAT
Pagina 88 din 143
3.6. Codarea semnalelor
Procesul de conversie analog-digital cuantizare este urmat de procesul de
codare prin care fiecrui eantion cuantizat i se atribuie un cod numeric binar,
compatibil cu structura intern a calculatorului.
Alegerea codurilor binare n reprezentarea eantioanelor cuantizate este o
consecin direct a tehnologiei digitale, care st la baza sistemelor de prelucrare
numeric i care este n mod exclusiv binar.
[3]
Un numr ntreg zecimal N se exprim n sistemul binar natural printr-un
ir de n+1 cifre binare (n+1 bii):
a
n
a
n-1
...a
1
a
0
(3.27.)
iar valoarea sa (exprimat n sistemul zecimal) este:
=
=
n
i
i
i
a N
0
2 , (3.28.)
unde | | | | n i a
i
,... 1 , 1 , 0 e e .
Valoarea maxim a numrului zecimal care se poate exprima cu relaia
(3.28.) este:
1 2
1
max
=
+ n
N (3.29.)
Spre exemplu, numrul binar 101011 reprezint n sistemul zecimal valoarea:
43 2 1 2 1 2 0 2 1 2 0 2 1
0 1 2 3 4 5
= + + + + + = N (3.30.)
Un numr fracionar X se poate reprezenta binar prin succesiunea
b
n
b
n-1
...b
1
b
0
(3.31.)
unde | | | | n i b
i
,... 1 , 1 , 0 e e ,care are n sistemul zecimal valoarea dat de expresia:
=
n
i
i
i
b N
0
2 cu
n
X 2 1
max
= (3.32.)
De exemplu, numrul fracionar binar 0,1011 reprezint n zecimal:
6875 . 0 2 1 2 1 2 0 2 1
4 3 2 1
= + + + =
X (3.33.)
n majoritatea convertoarelor analog-digitale se folosete forma binar
fracionar fr se mai reprezenta i virgula zecimal. Aceast form de codificare
este convenabil deoarece valoarea corespunztoare unui anumit cod este
interpretat ca o fraciune din valoarea maxim, X
max
, a domeniului semnalului pe
care convertorul l accept la intrarea sa. Dac toi biii sunt "1", atunci valoarea
corespunztoare acestui numr este maxim i rezult din (3.29.) ca fiind:
(1-2
-n
)X
max
, unde 2
-n
X
max
reprezint mrimea pasului de cuantizare, iar 2
-n
este bitul
cel mai puin semnificativ (LSB) al codului binar corespunztor.
Este important de subliniat c un cod obinut la ieirea unui DAC nu are
nici o semnificaie dac nu este specificat tipul codului i relaia de conversie.
NECLASIFICAT
NECLASIFICAT
Pagina 89 din 143
3.7. Conversia analog-numeric
Att conversia analog-digital ct i conversia digital-analogic se
realizeaz cu dispozitive fizice specifice. Astfel, n circuitele de eantionare-
memorare se realizeaz eantionarea iar convertoarele analog-digitale asigur
cuantizarea i codarea, separarea acestor dou procese fiind posibil i necesar
numai din punctul de vedere al analizei conceptuale.
Un convertor analog-digital transform o mrime analogic aplicat la
intrare (de obicei tensiune de 5V sau 10V) ntr-un semnal electric interpretabil
n tehnica digital (interval de timp, frecven sau cod numeric).
Dup tehnica de conversie utilizat, convertoarele A/D se clasific astfel:
convertoare A/D directe, care convertesc nemijlocit tensiunea aplicat la
intrare n cod numeric (de tip paralel, paralel serie, cu aproximaii succesive,
sigma-delta);
convertoare A/D indirecte care convertesc tensiunea n interval de timp
sau frecvena unor impulsuri (tensiune-frecven, cu simpl ramp, dubl ramp,
cu multipl ramp);
convertoare A/D hibride, care combin cele dou tehnici de conversie.
n construcia sistemelor de nregistrare a parametrilor de zbor se regsesc
doar dou dintre aceste tipuri, si anume:
convertoare A/D cu integrare n dou, sau mai rar 4 pante;
convertoare A/D cu aproximaii succesive;
Datorit utilizrii acestora n domeniul aeronautic, voi prezenta aceste dou
tipuri de convertoare n cele ce urmeaz.
Conversia analog numeric cu dubl pant
Conversia analog numeric cu dubl pant este ilustrat n urmtoarea
figur:
Figura 3.37. Schema de principiu a convertorului dubl pant
NECLASIFICAT
NECLASIFICAT
Pagina 90 din 143
Semnalul de intrare este integrat ntr-un interval de timp fixat T
i
,
determinnd la ieirea integratorului o ramp liniar dac este constant n timp.
La sfritul intervalului de timp de integrare partea logic determin deconectarea
semnalului analogic de intrare i conectarea la o tensiune de referin n locul
intrrii analogice. Referina este de polaritate invers fa de semnalele de intrare.
Timpul n care tensiunea pe integrator devine zero este dependent de
mrimea tensiunii la care a fost ncrcat condensatorul. Dac T
i
=N
i
T
c
, se msoar
intervalul de timp de descrcare T
x
=N
x
T
c
.
n timpul descrcrii se obine:
n timpul integrrii referinei, ieirea integratorului devine zero. Atunci:
cu T
i
=N
i
T
c
i T
x
=N
x
T
c
se obine:
de unde rezult:
unde
este media semnalului de intrare n intervalul considerat.
Conversia analog numeric cu aproximaii succesive (de tip serie)
Acest tip de conversie asigur o vitez de lucru relativ mare i o bun
rezoluie la un grad de complexitate mediu. Aceste convertoare se realizeaz sub
form integrat n tehnologie monolitic.
Convertorul are un singur comparator i un convertor digital-analog n
circuitul de reacie. n schem exist un registru de aproximaii succesive RAS
(constituit n principal din n bistabili i un circuit logic de comand), un generator
de tact i un registru tampon cu ieire TSL, unde se obine codul numeric ca
rezultat al conversiei.
O schem simplificat pentru un astfel de convertor este dat n figura 3.38.
(3.34.)
(3.35.)
(3.36.)
(3.37.)
NECLASIFICAT
NECLASIFICAT
Pagina 91 din 143
Fig. 3.38. Convertor analog numeric cu aproximaii succesive
Convertorul este prevzut cu o intrare analogic, unde se aplic
tensiunea de intrare u
i
, o intrare de comand "start conversie", ieirea digital de
n bii i o ieire "stare conversie'' care indic sfritul procesului de conversie,
respectiv momentul cnd datele sunt valide la ieire.
La funcionarea dup metoda aproximaiilor succesive, se realizeaz n
comparaii succesive cu un singur comparator n ritmul frecvenei de tact, n loc
de n comparaii simultane, cu 2
n
-1 comparatoare (n fiind rezoluia exprimat n
numr de bii).
La comanda start a conversiei (cu un impuls de nivel logic 1), RAS d la
ieire starea 1000...0, i comand la rndul lui convertorul D/A la ieirea cruia se
obine o tensiune
2
max
U
cu care se compar tensiunea de intrare (U
max
este limita
maxim a tensiunii de intrare u
i
).
Dac
2
max
U
u
i
> comparatorul i pstreaz starea i la al doilea impuls de
tact RAS genereaz la ieire codul 1100...0; dac
2
max
U
u
i
< comparatorul i
schimb starea la ieire, ceea ce determin ca RAS s genereze codul 0100...0. La
ieirea convertorului n cele dou situaii se obin tensiunile
max
4
3
U , respectiv
max
4
1
U . Succesiunea comparaiilor se face dup acest algoritm pn se ajunge la
bitul de semnificaie minim LSB.
Conversia complet se efectueaz n n tacte, dup ultimul tact obinndu-se
aproximarea:
=
= =
n
i
i
i
n
i
i
i ref i
a U a U u
1
max
1
2 2 (3.38.)
Valoarea maxim a tensiunii de intrare care se poate converti i pentru care
codul numeric la ieire este 111... 11, are expresia:
NECLASIFICAT
NECLASIFICAT
Pagina 92 din 143
.
2
1
1
max max
|
.
|
\
|
=
n
i
U u (3.39.)
Deci, pentru un convertor de +10V de 12 bii, codului de ieire 111...11 i
corespunde tensiunea de intrare:
V u
i
9976 , 9
2
1
1 10
12
max
= |
.
|
\
|
= (3.40.)
Diferena fa de 10 V este tocmai
n
2
1
, adic bitul de semnificaie minim (LSB).
Eroarea de conversie depinde de precizia convertorului D/A i
sensibilitatea comparatorului. Convertoarele A/D de 12 bii cu aproximaii
succesive au erori relative de ordinul 0,015 - 0,025% sau 0,5-1 LSB. Timpul de
conversie este cuprins ntre 5-40 s, pentru rezoluia amintit.
Principalul inconvenient al convertoarelor A/D cu aproximri succesive
const n slaba rejecie a semnalelor perturbatoare, dar aceste convertoare sunt
destul de rapide i ieftine, fiind cele mai rspndite n sistemele pentru achiziia
de date.
n urma prezentrii tipurilor principale de convertoare folosite n
fabricarea nregistratoarelor de bord, si avnd n vedere ca avionul pentru care
trebuie proiectat nregistratorul este unul supersonic, fapt care implic o variaie
a parametrilor n game destul de mari, am ajuns la concluzia c pentru conversia
analog numeric a datelor avem nevoie de un convertor pe 12 bii.
Un astfel de convertor este convertorul AD574 produs de firma american
Analog Devices. Acesta este un convertor cu aproximaii succesive,
ncadrndu-se n tipurile de convertoare utilizate menionate anterior. Fiind un
convertor pe 12 bii, asigur o precizie suficient a datelor preluate de DFDR.
Raportul pre/calitate este foarte bun, producia acestuia fiind una de serie mare.
AD574 are avantajul de a fi produs fie sub forma de licen, fie clonat de mai
multe firme, lucru care permite asigurarea pieselor de schimb cu uurin.
Acest convertor este utilizat cu succes de civa ani n nregistratoarele din
seria LORAL/FAIRCHILD-F1000.
Caracteristicile CAN AD574:
- CAN pe 12 bii cu referin i timer interne;
- Interfaa intern de magistral pentru microprocesor de 8/12/16 bii;
- Timp de conversie : maxim 35s;
- Timp de acces al magistralei: maxim 150 ns;
- Capsula plastic/ceramic in line;
- Operabil la alimentri 016,5 V;
- Temperaturi de operare: 075
o
C (AD574A,ADC574AK);
-55 +125
o
C (ADC574ASH,ADC574TH).
NECLASIFICAT
NECLASIFICAT
Pagina 93 din 143
Descriere CAN AD574:
Este un convertor analog/numeric pe 12 bii cu aproximaii succesive,
construit n tehnologie CMOS, coninnd o referin intern de tensiune de +10V,
Timer intern, interfaa digital pentru comunicaie cu microprocesor, precum i
ieiri three-state.
Convertorul este proiectat special pentru a minimiza erorile de
temperatura.
Poate fi setat pentru rezoluii de 8 sau 12 bii, n cazul din urm timpul de
conversie fiind de maxim 35s.
Datele numerice sunt disponibile n format TTL, prin intermediul unor
buffere three-state de ieire. Codul de ieire este binar unipolar.
n vederea simplificrii arhitecturii sistemului, avem n vedere faptul c
majoritatea microcontrolerelor au ncorporate n structura lor i convertoare
analog-numerice, eliminndu-se astfel necesitatea unui convertor independent,
care ar aduce i unele restricii minore referitoare interfaarea cu celelalte
componente din sistem.
NECLASIFICAT
NECLASIFICAT
Pagina 94 din 143
4. Arhitectura hardware a sistemului
4.1. Preliminarii
nregistratorul de bord impus de tema de proiect face parte din clasa
echipamentelor digitale de ultim generaie. Astfel, acesta trebuie sa rspund
tuturor cerinelor si standardelor existente care reglementeaz construcia
nregistratoarelor, precum i s asigure preluarea i memorarea optim a tuturor
parametrilor de bord analizai n capitolele precedente.
Tipul de memorie utilizat pentru stocarea datelor impus de tema
proiectului corespunde ultimelor tendine din domeniu, i anume memorie
semiconductoare de tip EEPROM (sau E2PROM Electrically Erasable
Programable Read-Only Memory).
Conform standardelor, blocul protejat trebuie s conin o sond
ultrasonic, declanabil de un cartu solubil n apa de mare, pentru localizarea
nregistratorului n cazul unei catastrofe produse deasupra mrii.
nregistratorul trebuie s fie capabil s preia att semnale analogice ct i
comenzi unice,iar formatul datelor asigurat la ieire s fie serial.
Echipamentul trebuie s fie capabil de dialog cu echipamentele de bord,
s livreze calculatorului de bord semnale de stare proprie, dar i cu echipamente
periferice externe, precum echipamente de testare, preluare i decodificare a
informaiilor. DFDR-ul trebuie sa conin circuite de control al paritii pentru
verificarea cerectitudinii datelor stocate i circuite pentru monitorizarea activitii
microprocesorului (COP computer operating properly, cunoscute si sub numele
de watch-dog).
Structura general a nregistratorului va fi aceea de sistem controlat de
microprocesor, mparit n trei mari blocuri: blocul de alimentare, blocul de
achiziie i prelucrare a semnalelor ct i blocul memoriei protejate.
Figura 4.1. Schema bloc simplificat a nregistratorului
NECLASIFICAT
NECLASIFICAT
Pagina 95 din 143
4.2. Arhitectura hardware a sistemului
Figura 4.2. Arhitectura hardware a nregistratorului de bord
NECLASIFICAT
NECLASIFICAT
Pagina 96 din 143
4.3. Blocul de alimentare al nregistratorului
Blocul de alimentare al nregistratorului este un dispozitiv modular de tip
plug-in (se poate integra n interiorul sistemului pentru a ndeplini funcii
specifice) care poate fi accesat printr-un capac mic n partea din spate-sus a
asiului nregistratorului cum se poate vedea n figura 4.3.
Figura 4.3. Parile componente al DFDR-ului
Acesta are rolul de a converti tensiunile primite de la reeaua
electroenergetic a avionului, 115 V c.a. / 400 Hz monofazat respectiv
28 V c.c., n tensiuni secundare necesare funciilor interne ale sistemului,
traductoarelor proprii, precum i furnizarea semnalelor de stare a alimentarii
(power-on alimentare corect, power-fail alimentare euat), acesta alertnd
microprocesorul i alte circuite de iminena cderii alimentrii, cu scopul de a
salva configuraiile i sarcinile n curs de derulare.
[7]
De asemenea, blocul de alimentare furnizeaz nregistratorului de voce din
cockpit un semnal de sincronizare temporal Time Code/FSK.
NECLASIFICAT
NECLASIFICAT
Pagina 97 din 143
4.4. Blocul de achiziie i prelucrare a semnalelor
n capitolul 3.1. am prezentat tipurile de semnale achiziionate i toate
procesele de prelucrare a acestora aferente nregistrrii de date. Pot astfel realiza
schema blocului de achiziie i prelucrare a semnalelor n vederea nregistrrii, pe
care o putem vedea n figura 4.4.
Figura 4.4. Schema blocului de achiziie i prelucrare a datelor
Blocul de achiziie i condiionare realizeaz adaptarea semnalelor de la
ieirile traductoarelor, filtrarea i amplificarea semnalelor la nivelul necesar
introducerii lor n multiplexorul analogic i circuitul de conversie. Majoritatea
traductoarelor ofer la ieire semnale n gama 0 5V, iar pentru cele ale cror
gam difer, au fost prezentate circuitele de condiionare i adaptare n capitolul
3.1.
Blocul de multiplexare are rolul de a repartiza fiecrei intrri o anumit
cuant de timp pentru a fi codificat. El se comport ca un comutator analogic
comandat cu un grup de semnale numerice generate de logica de comand.
Comanda multiplexorului i legarea intrrilor analogice se face dup o logic
impus de ratele de eantionare ale fiecrui semnal i de ctre dispunerea acestora
n frame. n vederea multiplexrii, aa cum am precizat i n capitolul 3.3, am
adoptat o schem piramidal, cu 17 multiplexoare 16:1, dintre care 16 primare i
unul secundar. Cele 32 de comenzi unice au fost grupate cu ajutorul a 4
multiplexoare 8:1, si cuplate n circuitul de multiplexare la multiplexoarele
primare astfel nct sa fie asigurat o rat de eantionare de 2 eantioane/secund.
Astfel, acest bloc compact de circuite identice, este vzut de microprocesor
ca un multiplexor cu 256 de linii de intrare, selecia canalului trimis la convertorul
NECLASIFICAT
NECLASIFICAT
Pagina 98 din 143
analog-numeric fiind fcut printr-o simpl incrementare a liniilor de adres ale
multiplexoarelor. ntruct cele 32 de comenzi unice nu necesit conversia
analog numeric, ele fiind deja vzute ca 1 i 0 logic iar n urma multiplexrii 8:1
drept cuvinte de 8 bii, trebuie s se implementeze o logic de comand a
seleciei canalelor prin care comenzile unice s nu fie afectate de conversia
analog-numeric.
Pentru realizarea conversiei analog-numerice, am decis c pentru
asigurarea unei rezoluii adecvate a parametrilor nregistrai, este nevoie de un
convertor pe 12 bii. Dup cum am precizat i n capitolul 3.7., majoritatea
microcontrolerelor au ncorporate convertoare analog numerice, lucru care
simplific interfaarea cu celelalte componente, n cazul nostru memoria pentru
stocare a informaiilor precum i unitatea de descrcare a datelor nregistrate n
vederea decodificrii la sol a parametrilor.
Criteriile de alegere ale unui microcontroller potrivit sunt mai ample, ns
principalul obiectiv este obinerea calitii dorite cu un cost ct mai sczut.
Calitile dorite se refer la performan, fiabilitate, caliti EMC (compatibilitate
electromagnetic cu mediul), iar costul total include costurile cercetrii,
proiectrii, construciei, testrii i reparrii produsului.
n primul rnd se pune problema stabilirii funciei pe care un microcontroler
trebuie s o ndeplineasc n sistem. Alegerea din catalog a unui microcontroler
trebuie fcut n ideea folosirii a ct mai puin hardware suplimentar. Dup
stabilirea microcontrolerului optim se verific preurile, disponibilitatea, suportul,
existena uneltelor de dezvoltare i stabilitatea firmei constructoare.
NECLASIFICAT
NECLASIFICAT
Pagina 99 din 143
4.5. Microcontroller-ul ATxmega128B3
[10]
Blocul de calcul va fi realizat cu ajutorul unui microcontroller, ceea
presupune att o implementare hardware a sistemului ct i o implementare
software. n prezentul proiect voi trata implementarea hardware a sistemului
utiliznd microcontrolerul Atxmega128B3 produs de firma Atmel.
Motivul alegerii acestui microcontroler este dat de existena n componena
sa a unui convertor analog-numeric pe 12 bii, existena interfeelor SPI (Serial
Peripheral Interface) i I2C (Inter Integrated Circuits) care sunt interfeele
principale ale memoriilor de tip EEPROM pe care le vom utiliza, precum i preul
de cost redus, disponibilitatea produsului i nu n ultimul rnd, ncadrarea n
condiiile mecano-climatice de funcionare.
Microcontrolerul Atxmega128B3 face parte din familia de microcontrollere
cu consum redus de energie, performane ridicate, bogat n periferice, bazat pe
arhitectura RISC (Reduced Instruction Set Computing) mbuntit. Prin
executarea instruciunilor ntr-un singur cicul de ceas, dispozitivul poate executa
pn la 32 de milioane de instructiuni pe secund (MIPS) la o frecven de 32
MHz, permind astfel optimizarea consumului de energie comparativ cu viteza
de procesare.
Unitatea de procesare combina un bogat set de instruciuni cu 32 de registre
de lucru de uz general. Toate cele 32 de registre sunt conectate direct la unitatea
logic aritmetic (ALU Arithmetic Logic Unit), care permite accesarea a dou
registre independente ntr-o singur instruciune, executat ntr-un singur ciclu de
ceas.
Microcontrollerul ofer urmtoarele faciliti: 128 Kilobytes memorie
programabil FLASH cu posibilitatea de citire n timpul scrierii, 2 Kb memorie
EEPROM i 8Kb memorie SRAM, controler DMA (direct memory acces) pe
dou canale, 36 de linii intrare/ieire de uz general, numrtor n timp real de
32MHz (RTC real time counter), o interfa serial pe dou fire (I2C), doua
interfee seriale periferice (SPI), o interfa USB 2.0., opt canale de convertor
analog-numeric pe 12 bii, cu ctig programabil, dou comparatoare analogice i
timer Watchdog cu oscilator intern separat.
Memoria Flash are o via de 10 000 de cicluri de scriere-tergere iar
memoria EEPROM are o via de 100 000 de cicluri de scriere-tergere. Durata
de pstrare a datelor este de 20 de ani pentru o temperatur de 85
o
C i de 100 de
ani pentru 25
o
C.
Caracteristici electrice: temperatur de funcionare: -45
o
C +105
o
C;
temperatur de stocare -60
o
C +125
o
C; tensiuni de operare 1.6V 3.6V;
frecvenede operare: 012 MHz de la 1.6V i 32 MHz de la 2.7V.
NECLASIFICAT
NECLASIFICAT
Pagina 100 din 143
Figura 4.5.Diagrama bloc i configuraia pinilor microcontroller-ului
Arhitectura AVR are dou spaii principale de memorie, i anume memoria
program i memoria de date. Codul executabil poate fi scris doar n memoria
program, n timp ce datele pot fi stocate att n memoria program ct i n memoria
de date. Memoria de date include memoria SRAM (Static Random Acces
Memory) intern i memoria EEPROM pentru stocarea nevolatil a datelor. Toate
spaiile de morie sunt lineare. O seciune separat a memoriei conine biii de
siguran care sunt folosii pentru configurarea funciilor importante ale
NECLASIFICAT
NECLASIFICAT
Pagina 101 din 143
sistemului i pot fi scrise doar cu ajutorul unui programator extern. n plus, fiecare
dispozitiv are un rnd de semnatur n memoria Flash pentru datele de calibrare,
de identificare a dispozitivului, numrului de serie, etc.
Dispozitivele AVR XMEGA conin memorie reprogramabil flash pentru
stocarea programului. Memoria flash poate fi accesat pentru scriere i citire de
la un porgramator extern prin intermediul PDI (Program an Debug Interface) sau
prin aplicaia software care ruleaz pe dispozitiv. Toate instruciunile
procesoarelor AVR sunt de 16 sau 32 de bii, iar fiecare locaie flash este de 16
bii. Memoria flash este organizat n dou mari seciuni, Application section
(seciunea aplicaiei) i Boot loader section (seciunea de ncrcare). Cele dou
seciuni au dimensiuni fixe, dependente de dispozitiv (vezi figura 4.6.). Cele dou
seciuni au bii de blocare separai (lock bits), i pot avea diferite niveluri de
protecie. Seciunea aplicaiei cuprinde un tabel al seciunii aplicaiei
(application table section) cu setri de blocare separate. Acesta permite stocarea
n condiii de siguran a datelor nevolatile n memoria program.
Figura 4.6. Memoria program a microcontroller-ului
Seciunea aplicaie este seciunea de flash care este folosit pentru stocarea
codului executabil al aplicaiei. Nivelul de protecie pentru aceast seciune poate
fi selectat de biii de blocare din seciunea de ncrcare. Seciunea aplicaiei nu
poate stoca nici un cod de ncrcare.
Tabelul seciunii aplicaiei este o parte a acesteia care poate fi utilizat
pentru stocarea datelor. Dimensiunea acestuia este egal cu dimensiunea seciunii
de ncrcare. Dac aceast seciune nu este utilizat pentru date, codul aplicaiei
poate fi stocat aici.
n timp ce seciunea aplicaiei este folosit pentru stocarea codului
aplicaiei, software-ul seciunii de ncrcare trebuie s situat n seiunea de
NECLASIFICAT
NECLASIFICAT
Pagina 102 din 143
ncrcare deoarece instruciunea SPM (store program memory) poate iniia
programarea doar cand se execut din aceast seciune. Dac aceast seciune nu
este utilizat pentru software-ul de ncrcare, atunci se poate stoca aici codul
aplicaiei.
Memoria de date conine memoria de intrare/ieire, memorie SRAM
(memorie cu acces aleator static) intern i opional memorie mapat EEPROM.
Memoria de date este organizat ca o seciune de memorie continu (vezi figura
4.7.). Pentru simplificarea dezvoltrii, memoria de intrare/ieire, memoria static
cu acces aleator i memoria EEPROM, va avea mereu acceai adres de nceput
pentru toate dispozitivele XMEGA.
Figura 4.7. Adresele memoriei de date (hexazecimale)
EEPROM-ul microcontrolerului Atxmega128B3 are o dimeniune de 2KO.
Este organizat ca un spaiu separat fa de memoria de date, unde se pot scrie i
cii doar octei. Memoria are o durat de 100 000 de cicluri de tergere/scriere.
Accesul dintre EEPROM i CPU se realizeaz pe una din interfeele SPI, JTAG
sau paralel.
NECLASIFICAT
NECLASIFICAT
Pagina 103 din 143
4.6. Convertorul analog numeric al ATxmega128B3
[10]
Caracteristici:
- Conine un convertor analog-numeric (ADC);
- Rezoluia de 12 bii;
- Pn la 300 de mii de eantioane pe secund;
o Timpul de conversie de 2.3 s la rezoluia de 8 bii;
o Timpul de conversie de 3.35 s la rezoluia de 12 bii;
- Intrare single-end i dieferenial;
o Pn la 8 intrri single-end;
o 8 x 4 intrri difereniale fr ctig;
o 8 x 4 intrri difereniale cu ctig;
- Etaj de amplificare ncorporat de 1x/2,1x,2x,4x,8x,32x i 64x;
- Opiuni de conversie unic, continu i cutare;
- Trei intrri interne:
o Senzor intern de temperatur;
o Tensiunea Vcc mprit la 10;
o 1.1 V decalaj de tensiune;
- Opiuni de referin intern i extern;
- Funcie de comparare pentru monitorizarea precis a
pragurilor definite de utilizator;
- Opional conversie declanat de eveniment pentru o
sincronizare exact;
- Opional transfer DMA al rezultatelor de conversie;
- Opional ntrerupere operaie la rezultatul comparaiei.
ADC-ul convertete semnalele analogice n valori digitale. Acesta are o
rezoluie de 12 bii i este capabil de conversia a pn la 300 de mii de eantioane
pe secund. Selecia de intrare este flexibil, putnd fi facute att msurtori
single-end ct i msurtori difereniale.
Intrarea poate fi ,,single end tensiunea de intrare se calculeaz ntre pinul
de intrare i GND, sau diferenial diferena de tensiune ntre doi pini de intrare.
Pentru msurtorile difereniale este disponibil un etaj de amplificare
pentru a mri gama dinamic. n plus, sunt disponibile i unele semnale de intrare
interne. ADC-ul poate oferi att rezultate cu semn ct i rezultate fr semn.
Msurtorile ADC-ului pot fi iniiate fie de aplicaia software, fie de un
semnal venit de la un alt periferic al microcontroller-ului. Msurtorile pot fi
pornite cu sincronizare predictibil, i fr intervenie software. Este posibil
utilizarea memoriei cu acces dinamic (DMA) pentru a muta rezultatele conversiei
NECLASIFICAT
NECLASIFICAT
Pagina 104 din 143
direct n memoria microcontroller-ului sau ctre periferice, cnd este finalizat
procesul de conversie.
ADC-ul poate folosi att tensiuni de referin interne ct i externe. Un
senzor de temperatur integrat este disponibil pentru utilizarea cu ADC-ul.
Convertorul are i o funcie de comparare pentru monitorizarea exact a
pragurilor definite de utilizator, care necesit o minim intervenie software.
Figura 4.7. Vedere de ansamblu asupra ADC-ului
Sursele de intrare sunt tensiunile pe care ADC-ul le poate msura i
converti. Pentru acest ADC exist 4 tipuri de msurtori ce pot fi selectate:
- intrare diferenial;
- intrare diferenial cu ctig;
- intrare single-end;
- intrare intern.
Pinii de intrare sunt folosii pentru intrrile single-end i difereniale, n
timp ce intrrile interne sunt disponibile direct din interiorul dispozitivului. Pentru
dispozitivele cu dou ADC-uri, pinii PORTA pot fi de intrare pentru ADCA iar
pinii PORTB pentru ADCB. Pentru dispozitivele cu un singur ADC, att pinii
PORTA ct i PORTB pot fi folosii pentru intrarea lui ADCA.
Pentru aplicaia noastr vom intrarea ADC-ului va fi de tip single-end.
Pentru msurtorile single-end, toi pinii de intrare pot fi folosii drept intrri.
Aceste msurtori pot fi fcute n ambele moduri, cu semn, respectiv fr semn.
NECLASIFICAT
NECLASIFICAT
Pagina 105 din 143
Intrarea negativ este conectat la GND intern n msurtoarea cu semn.
Figura 4.8. Msurtoare cu semm (stnga) i fr semn (dreapta)
n modul fr semn, intrarea negativ este conectat la jumtate din
tensiunea de referin (VREF) minus o tensiune de compensare fix:
V= VREF x 0.05
Gama de variaie a semnalului la intrarea n ADC este cuprins ntre 0 i
VREF pentru intrrile pozitive de tip single-end.
Rezultatele conversiei analog-numerice sunt scrise n registrele de rezultate
ale ADC-ului. Convertorul poate fi configurat s genereze rezultate de 8 sau 12
bii. Rezultatele cu rezoluie mai mic vor fi disponibile mai rapid. Registrul de
rezultate are o lime de 16 bii, iar datele sunt stocate drept valori de 16 bii
aliniai la dreapta. Alinierea la dreapta nseamn c 8 cei mai puin semnificativi
bii (LSB) se gsesc n octetul low. Un rezultat pe 12 bii poate fi reprezentat
aliniat la dreapta sau la stnga. Alinierea la stnga inseamn c 8 cei mai
semnificativi bii (MSB) se gasesc n octetul high.
Controller-ul DMA (Direct Memory Acces) poate fi utilizat petru a
transfera rezultatele conversiei ctre memorie sau alte periferice. Un nou rezultat
al conversiei poate declana un transfer DMA.
ADC-ul poate genera cereri de ntrerupere i de evenimente. Canalul
convertorului are setri de ntrerupere individual i vectori de ntrerupere.
Cererile de ntrerupere i evenimentele pot fi generate cnd conversia analog
numeric este complet sau cnd msurtoarea ADC-ului este deasupra sau sub
valoarea din registrul de comparare.
NECLASIFICAT
NECLASIFICAT
Pagina 106 din 143
4.7. Blocul memoriei protejate
Tema proiectului impune drept mediu de stocare al datelor memoriile
semiconductoare de tip EEPROM. Pentru a putea calcula cantitatea de memorie
necesar, trebuie s detaliem modul de organizare a informaiei.
Informaia este organizat n frame-uri a cror durat a fost stabilit a fi de
o secund. Fiecrui parametru msurat i corespunde cel putin o adres fix n
frame , deci i n memorie.
Valorile standard ale ratelor de eantionare permit o reprezentare foarte
sugestiv a frame-ului, aceasta putndu-se reprezenta ca o matrice de 16 linii i
16 coloane (vezi tabelul 4.1.), fiecare element fcndu-i apariia doar pe o singur
coloan, aprnd astfel ntr-un mod periodic ca element al acesteia, astfel nct
adresarea lui va fi mult simplificat. Distribuia uniform obinut prin acest mod
de reprezentare a informaiei face posibil o decodificare facil.
Alturi de parametrii analogici i comenzile unice, nregistratorul mai preia
urmtoarele informaii:
- numrul aeronavei - NA - pe12 bii
- numrul pilotului NP - pe 8 bii
- luna, ziua, anul ALZ - pe16 bii
- ora i minutul corespunztoare nceputului zborului -12 bii
- numrul operatorului la sol - NOS - pe8 bii
Datele acestea sunt numite date documentare ale aeronavei i folosesc la
mpiedicarea falsificrii nregistrrilor, dar i pentru a deine o eviden mult mai
clar a acestora. Ele vor fi nregistrate n 7 cuvinte de 8 bii chiar la nceputul
nregistrrii (7 octei).
Calculul necesarului de memorie:
Durata unui cadru este de o secund, iar ntr-un cadru avem 256 de adrese
de locaii de memorie .Timpul maxim de nregistrare impus este de 90 de minute.
Din cele 256 de adrese 8 sunt folosite pentru comenzile unice, rmnndu-ne
astfel 248 de adrese de memorie pentru parametrii analogici.
Cele 32 de comenzi unice sunt grupate cte 8 , adic 4 octei, ceea ce
nseamn c la o rat de dou eantioane pe secund avem nevoie de 8 octei ntr-
o secund de zbor pentru comenzile unice.
Cei 64 de parametri analogici sunt convertii cu ajutorul unui convertor
analog numeric pe 12 bii. Avem:
24812=2976 b = 372 octei necesari pentru stocarea parametrilor analogici
ntr-o secund de zbor.
M= 7B + (372B+8B)5400s = 2052007 B = 1,96 MB de memorie pentru 90
de minute de zbor. (b=bit, B=byte/octet, KB = kilobyte, MB = megabyte).
NECLASIFICAT
NECLASIFICAT
Pagina 107 din 143
Tabelul 4.1.Reprezentarea matriceal a frame-ului
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0 Nx Ny Nz SAU stab.s eler T3.st. n1.dr. n2.st. p4.dr. Ucc27V Long.
1 Nx Ny Nz SAU m m stab.d H.b dir T3.dr. n1.st. m pu.st. Vbk.st. Trim.el. Comb.
2 Nx Ny Nz SAU stab.s eler T1.st. T4.st. v.i. mgst pu.dr. Vbk.dr. Trim.pr. q.comb.
3 Nx Ny Nz SAU m m stab.d H.r T1.dr. T4.dr. v.a. mgdr p1.st. Vbtb.st. Trim. 8B-1
4 Nx Ny Nz SAU stab.s eler T3.st. n1.dr. volst p1.dr. Vbtb.dr. O2 8B-2
5 Nx Ny Nz SAU m m stab.d H.b dir T3.dr. n1.st. voldr p2.st. Aj.st. T.st. 8B-3
6 Nx Ny Nz SAU stab.s eler T1.st. T4.st. TempA p2.dr. Aj.dr. T.dr. 8B-4
7 Nx Ny Nz SAU m m stab.d H.r T1.dr. T4.dr. g n2.dr. p4.st. Uca115V Lat. Time
8 Nx Ny Nz SAU stab.s eler T3.st. n1.dr. n2.st. p4.dr. Ucc27V Long.
9 Nx Ny Nz SAU m m stab.d H.b dir T3.dr. n1.st. m pu.st. Vbk.st. Trim.el. Comb.
10 Nx Ny Nz SAU stab.s eler T1.st. T4.st. v.i. mgst pu.dr. Vbk.dr. Trim.pr. q.comb.
11 Nx Ny Nz SAU m m stab.d H.r T1.dr. T4.dr. v.a. mgdr p1.st. Vbtb.st. Trim. 8B-1
12 Nx Ny Nz SAU stab.s eler T3.st. n1.dr. volst p1.dr. Vbtb.dr. O2 8B-2
13 Nx Ny Nz SAU m m stab.d H.b dir T3.dr. n1.st. voldr p2.st. Aj.st. T.st. 8B-3
14 Nx Ny Nz SAU stab.s eler T1.st. T4.st. TempA p2.dr. Aj.dr. T.dr. 8B-4
15 Nx Ny Nz SAU m m stab.d H.r T1.dr. T4.dr. g n2.dr. p4.st. Uca115V Lat. Mach
NECLASIFICAT
NECLASIFICAT
Pagina 108 din 143
n urma calculelor am ajuns la concluzia c avem nevoie de 2 megaoctei
de memorie pentru 90 de minute de zbor. Totui, avnd n vedere c este posibil
alimentarea n zbor i astfel poate fi extins timpul n care aeronava poate sta n
aer, consider mai eficient adugarea a nc 2 megaoctei de memorie dect s o
rescriem dup atingerea capacitii maxime, avnd n vedere faptul c preul de
cost pentru memoriile semiconductoare EEPROM nu este deloc ridicat iar
implementarea software nu ridic probleme.
EEPROM (sau E2PROM), denumire provenit de la Electrically Erasable
Programmable Read-Only Memory, este un tip de memorie nevolatil folosit n
calculatoare i alte echipamente electronice pentru a stoca date ce trebuie s
persiste i dup ntreruperea alimentrii cu curent. Cea mai important
caracteristic a acestei memorii este c nu e volatil. Acest lucru simplific
construcia nregisstratoarelor de bord, ntruct nu este necesar adoptarea unei
surse de avarie, datele rmnnd nregistrate chiar i dup ntreruperea alimentrii
cu curent, inevitabil n cazul unei catastrofe.
Cnd este necesar un spaiu mai mare de stocare (ntlnit la stick-urile
USB), se folosete din motive economice un alt tip de memorie EEPROM:
memorie flash.
Memoria EEPROM este format dintr-o matrice de celule de memorie care,
la rndul lor, sunt formate din perechi de tranzistori ce au ntre ei un strat subire
de oxid izolator. Un tranzistor este numit poart flotant (floating gate), iar cellalt
poart de control (control gate).
Memoria EEPROM poate fi tears i reprogramat (rescris) n mod
repetat prin aplicarea unei tensiuni mai mari dect cea generat de circuitul extern
sau intern, n cazul celor mai moderne memorii EEPROM. De obicei memoriile
EPROM trebuie nlturate din circuit pentru tergere sau programare, n timp ce
memoriile EEPROM pot fi programate i sterse n circuit. Datorit numrului
limitat de programri/tergeri, memoriile EEPROM sunt cel mai des ntlnite ca
memorii de stocare a datelor de configuraie, i mai rar ca memorii cu acces
aleator.
Dup studierea cataloagelor de profil, am ales s folosesc pentru stocarea
informaiilor 4 chip-uri de memorie identice, fiecare cu capacitatea de 1 MB.
Memoria aleas are numele de catalog AT25M01 i este produs de firma Atmel.
Preul este redus, se afl nc n procesul de producie i se gsete la mai muli
distribuitori, lucru care ne garanteaz existena pieselor pentru nlocuire n cazul
apariiei unor defecte sau pentru cazul n care memoria a atins numrul maxim de
cicluri de tergere i rescriere admis.
[10]
NECLASIFICAT
NECLASIFICAT
Pagina 109 din 143
Caracteristici:
- Compatibilitate cu interfaa serial periferic (SPI);
- Suport modurile SPI 0(0,0) i 3(1,1) ;
- Functionare la alimentri de tensiuni mici:
o Vcc=1.7V la 5.5V
- Frecvene de lucru mari:
o 20MHz frecven de tact de la 4.5V la 5.5V;
o 10 MHz frecven de tact de la 2.5V la 5.5V;
o 5Mhz frecven de tact de la 1.7V la 5.5V;
- Suport operaii Byte Write (scrierea octeilor) i 256-byte Page Mode
(scrierea paginilor de cte 256 de octei);
- Protecia blocului de scriere:
o Protecie , , sau n ntregime;
- Pin de protecie a scrierii (write protect
) i instruciuni de
dezactivare a scrierii (write disable) pentru protecie hardware ct i
software;
- Ciclu de scriere auto cronometrat (maxim 5ms);
- Rezisten ridicat:
o Anduran: 1 000 000 cicluri de scriere;
o Retenia datelor: 100 de ani;
- Posibiliti de livrare n forme diferite: SOIC (small-outline integrateg
circuit) i WSCLP (Wafer Level Chip Scale Packing).
Memoria Atmel AT25M01 ofer o capacitate de 1 MB de meorie tip
EEPROM organizat drept 131,072 de cuvinte de 8 bii fiecare. Dispozitivul este
optimizat pentru utilizarea n multe domenii industriale i i comerciale n care
funcionarea la tensiuni i puteri mici sunt eseniale.
AT25M01 este activat prin intemediul funciei Chip Select (
) i accesat
printr-i interfa cu 3 fire alctuit din: Seria Data input (SI-intrare de date serial),
Serial Data Output (SO- ieire de date serial), i Serial Clock (SCK). Toate
ciclurile de programare sunt auto-temporizate, fr cicluri de tergere separate
necesare nainte de a scrie.
Protecia de blocare a scrierii este activat prin programarea registrului de
stare cu , , sau ntreaga matrice la protecia la scriere. Instruciuni separate de
activare i dezactivare program (Program enable/disable) sunt oferite pentru
protecia adiional a datelor. Protecia hardware a datelor este oferit de pinul
care blocheaz ncercrile inadvertente de scriere n registrul de stare. Pinul
poate fi utilizat pentru a ntrerupe orice comunicaie serial fr a reseta
secvena serial.
NECLASIFICAT
NECLASIFICAT
Pagina 110 din 143
Figura 4.9. Vederile chip-ului de memorie i dimensiunile acestuia
Figura 4.10. Configuraia pinilor memoriei AT25M01
NECLASIFICAT
NECLASIFICAT
Pagina 111 din 143
Figura 4.11. Diagrama bloc a memoriei AT25M01
Limitele de funcionare:
- Temperatura de lucru: de la -55
o
C la +125
o
C;
- Temperatura de stocare: de la -65
o
C la +150
o
C
- Tensiunea la fiecare pin: -1V la +7V;
- Tensiunea de lucru maxim: 6.25V;
- Curentul de ieire: 5mA.
Utilizarea depind aceste limite poate cauza defeciuni permanente
dispozitivului, iar expunerea la condiiile maxime pentru perioade ndelungate
poate afecta autenticitatea datelor.
Partea protejat a DFDR-ului, respectiv blocul de memorie,trebuie s se
conformeze standardelor mecano-climatice impuse nregistratoarelor, care au fost
prezentate n capitolul 1.5. Din punct de vedere constructiv, forma ideal a
blocului memoriei protejate (denumit n standardele ARINC i MIL Crash
survivable memory unit - CSMU) este cea sferic, vopsit n portocaliu
fluorescent, dar din considerente tehnologice este realizat sub form de
paralelipiped n majoritatea cazurilor.
NECLASIFICAT
NECLASIFICAT
Pagina 112 din 143
Figura 4.12. Crash Survivable Memory Unit
Din punctul de vedere al structurii interne, CSMU conine:
- Blocurile de memorie;
- Interfaa cu blocul de achiziie care are dublu rol: culegerea datelor, iar
n caz de catastrof citirea datelor nregistrate;
- Baliza ultrasonic pentru localizarea subacvatic n caz de catastrof,
(dispozitiv denumit de standardul MIL Underwater Locating Device
a crui declanare este efectuat de un cartu solubil n mediul salin, al
crui contact cu exteriorul este o membran cu diametrul de 1.5mm,
localizat n interiorul pereilor compartimentai ai primului scut dublu
de protecie exterioar al DFDR, care are n zona respectiv o serie de
perforaii.
- Scuturile de protecie termo-mecanic, acestea oferind posibilitatea prin
modul de dispunere accesul direct la bancurile de memorie n caz de
catastrof.
Controlul periodic al nregistratorului, utiliznd echipamente anexe
(calculator, set de traductoare simulate, etc.), include i testarea capacitii de
funcionare corect a blocului memoriei protejate, precum i comportarea balizei
ultrasonice simulndu-se mediul marin.
NECLASIFICAT
NECLASIFICAT
Pagina 113 din 143
Figura 4.13. prezint modalitile de dispunere ale nregistratorului pe
aeronav. Zona de la baza derivei ct i cea de pe coama dorsal (ntre motoare)
sunt unele din cele mai puin expuse n caz de catastrof, prin aceast modalitate
de dispunere asigurndu-se reducerea solicitrilor la care este supus blocul
memoriei protejate.
Figura 4.13. Poziiile de dispunere ale DFDR-ului pe aeronav
n capitolul urmtor, care va cuprinde descrierea arhitecturii fluxului de
date a sistemului, voi analiza i modul de accesare al memoriei.
NECLASIFICAT
NECLASIFICAT
Pagina 114 din 143
5. Arhitectura fluxului de date vehiculat i controlul
funcionrii sistemului
5.1. Introducere
Sistemele de achiziie a datelor sunt deseori incluse alturi de alte aparate
electronice ntr-un sistem complex de msurare, prelucrare a rezultatelor i
conducere, coordonat de un calculator central. Principala problem ce trebuie
soluionat n cadrul unui astfel de sistem o constituie dialogul ntre elementele
componente.
n sens larg, o interfa asigur comunicarea aparatelor electronice cu un
calculator central, n scopul setrii modului lor de funcionare precum i transferul
propriu-zis de date. Evident, fiecare echipament din sistem trebuie s fie prevzut
cu un bloc de interfa pentru interconectarea cu restul echipamentelor. Transferul
de date se realizeaz prin aa-numita magistral, al crei suport fizic poate fi unul
cu fir (conductori convenionali) sau fr fir (canal radio sau transmisie n
infrarou). Realizarea unui sistem complex este mult uurat dac echipamentele
ce urmeaz a fi conectate ntre ele sunt dotate cu interfee standardizate.
n cadrul unui standard de interfa sunt definite deopotriv mrimile
mecanice (tipul conectoarelor), mrimile electrice (valori limit de tensiune i de
curent ale semnalelor logice), dar i magistralele i protocoalele de comunicaie
corespunztoare standardului.
n general, prin protocol de comunicaie se nelege ansamblul de bii,
caractere i coduri de comand utilizate pentru transferul datelor ntre
echipamentele cuplate printr-o interfa standard. Un protocol de comunicaie
trebuie s exclud orice posibilitate de confuzie, pierderi de date i blocuri de
informaie, i s permit, n acelai timp, ca echipamentele mai lente s poat
comunica cu echipamentele mai rapide. Totodat, protocolul trebuie s fie
independent de structura hard a echipamentelor (tipul de circuite integrate
folosite, etc.), pentru c altfel modificrile sau mbuntirile tehnologice ar fi
greu de aplicat.
Un sistem de achiziie de date dotat cu o interfa standard, poate fi conectat
la orice calculator de uz general, prevzut cu interfaa standard corespunztoare.
n prezent, exist un mare numr de interfee standard, care pot fi grupate
n dou categorii: interfee de tip serie i interfee de tip paralel.
Interfaa serie folosete un numr redus de linii de comunicaie, pe care biii
de informaie sunt transmii succesiv. Din aceast cauz, precum i datorit
faptului c pe lng biii de informaie, corespunztori unui octet, se transmit i
alte informaii (biii de start i de stop, pentru a delimita un octet, etc.), rezult c
NECLASIFICAT
NECLASIFICAT
Pagina 115 din 143
viteza de transfer este redus. Avantajele comunicaiei serie const n numrul
redus de linii de comunicaie, precum i posibilitatea conectrii relativ simple a
dou aparate aflate la distane mari. Din categoria interfeelor/magistralelor
seriale fac parte, de exemplu: RS 232, I2C, RS 422, SPI.
Interfaa de tip paralel folosete comunicaia paralel ntre echipamentele
cuplate la o magistral, astfel nct biii de date ai unui cuvnt (unul sau doi octei)
sunt transmii simultan, pe linii diferite. n afara liniilor de date propriu-zise,
magistrala standard de tip paralel mai include i linii pentru semnalele de
comand, necesare pentru buna desfurare a comunicaiei. Apariia unor noi
interfee de tip paralel, este n continuare impus de nevoia mereu crescnd de a
transfera date cu viteze din ce n ce mai mari ntre diferite echipamente (zeci de
Moctei/s).
Microcontroller-ul ales pentru controlul sistemului (Atxmega128B3),
dispune de mai multe interfee seriale, cum ar fi SPI(interfa serial periferic),
TWI (interfa serial pe 2 fire) , USB (interfa serial universal) i USART
(interfa serial sincron i asincron universal).
n vederea stocrii datelor, memoria EEPROM aleas (AT25M01) dispune
de o interfa serial periferic (SPI).
n prezentul capitol voi indica modul de comunicare dintre convertorul
analog-numeric i memorie n scopul nregistrrii, ct i modul de comunicare al
memoriei cu exteriorul, n scopul decodificrii la sol a datelor memorate.
Microcontroller-ul ales dispune de un circuit de control care ofer acces
direct la memoria intern a microcontroller-ului, DMAC Direct Memory Access
Controller. Acesta permite transferul de date de mare vitez cu intervenia minime
a CPU (Central Processing Unit - unitatea central de procesare a datelor) ntre
memoriile de date interne, memoria de date intern ctre periferice, de la
periferice ctre memoria de date, respectiv ntre periferice.
NECLASIFICAT
NECLASIFICAT
Pagina 116 din 143
5.2.Controller-ul accesului direct la memoria intern DMAC
[10]
Controller-ul acccesului direct la memorie (DMAC) are dou canale care
permit transferul de date ntre memoriile interne ale microcontroller-ului
ATxmega128B3 i dispozitivele periferice (precum memoria EEPROM n care
vom nregistra datele de zbor) cu intervenia minim a unitii centrale de
procesare (CPU). Microcontroller-ul ales dispune de 4 Kilobytes de memorie
SRAM i de 2 Kilobytes de memorie EEPROM proprii. Cele dou canale permit
transferuri paralele i independente, de exemplu scrierea memoriei ct i citirea
datelor nregistrate n acelai timp.
Controller-ul DMA (Direct Memory Access) poate muta date ntre
memoria SRAM (Static Random Access Memory) i regitrii perifericelor. Cu
acces la toate perifericele, controller-ul DMA poate manipula transferuri de date
ctre/de la modulele de comunicare.
Transferurile de date sunt fcute n rafale continue de 1, 2, 4 sau 8 octei.
Adresarea sursei i a destinaiei poate fi static, incremental sau decremental.
Rencrcarea adreselor sursei i/sau a destinaiei poate fi fcut dup fiecare
secven de transfer, sau la finalul transferului. Software-ul aplicaiei, perifericele
sau evenimentele sunt cele care pot declana transferurile DMA.
Cele dou canale ale DMA au configuraie i instruciuni de control
individuale. Aceasta include sursa, destinaia, declanatoarele de transfer i
dimensiunile transferurilor.
Pentru a permite transferurile continue, cele dou canale pot fi
interconectate astfel nct cel de-al doilea canal preia transferul cnd primul
termin, i viceversa.
Figura 5.1. Prezentarea de ansamblu a DMAC
NECLASIFICAT
NECLASIFICAT
Pagina 117 din 143
O operaie complet de citire i scriere ntre memorii i/sau periferice este
numit tranzacie DMA. Tranzaciile sunt fcute n blocuri de date, i
dimensiounile tranzaciei (numrul octeilor tranferai) este selectabil cu ajutorul
software-ului i controlat de dimnesiunea blocului i setrile contorului de
repetiie. Fiecare bloc este divizat n rafale mai mici.
Un contor de repetiie poate fi utilizat pentru a stabili un numr de blocuri
de transfer repetate nainte ca o tranzacie s fie complet.
Din moment ce unitatea central de procesare i controller-ul DMA
utilizeaz aceleai magistrale de date, transferul unui bloc este mprit n rafale
mai mici de transfer de 1,2,4, sau 8 octei, ceea ce nseamn c dac DMA ocup
magistrala i o cerere de transfer este n ateptare, acesta va ocupa magistrala pn
cnd toi octeii din rafal vor fi transferai.
Un arbitru de magistral controleaz cnd DMAC i CPU pot utiliza
magistrala. CPU are mereu prioritate, deci ct timp CPU necesit accesul la
magistral, orice rafal de transfer n ateptare trebuie s atepte. Unitatea central
de procesare necesit accesul la magistral cnd execut o instruciune care scrie
sau citete date de la memoria SRAM, memoria de intrare/ieire sau iterfaa
magistralei externe.
Figura 5.2. Tranzaciile DMA
Transferurile DMA pot ncepe doar cnd sunt detectate cererile de transfer,
care pot fi declanate din software, de ctre periferice sau de unele evenimente.
n mod implicit, un declanator pornete o operaie de transfer a unui bloc de date,
iar n momentul n care transferul este complet, canalul este dezactivat automat.
De asemnea, se poate declana doar transferul unei singure rafale de date. Daca
modul de repetiie este activat, transferul urmtorului bloc de date nu mai necesit
un declanator, ncepnd imediat ce blocul de date precedent a fost transferat.
Dac sursa declanatoare genereaz o cerere de transfer n timpul unui
transfer aflat n desfurare, aceasta va fi pus n ateptare i transferul va putea
ncepe la finalul celui aflat n curs. Se poate reine doar o singur cerere de
transfer, deci n cazul n care sursa declanatoare genereaz mai multe cereri de
transfer cnd una este deja n ateptare, aceasta va fi pierdut.
NECLASIFICAT
NECLASIFICAT
Pagina 118 din 143
5.3. Interfaa SPI
Interfaa seriala SPI (Serial Peripheral Interface) este o interfaa sincron
standard de mare vitez, ce opereaz n mod full duplex. Numele ei a fost dat de
Motorola. Ea e folosit ca sistem de magistral serial sincron pentru
transmiterea de date, unde circuitele digitale pot s fie interconectate pe principiul
master-slave. Aici, modul master/slave nseamn, c dispozitivul (circuitul)
digital master iniiaz cuvntul de date. Mai multe dispozitive (circuite) digitale
slave sunt permise cu slave select individual, adic cu selectare individual.
Figura 5.3. SPI bus: single master i single slave
SPI-ul are patru semnale logice specifice:
- SCLK - Ceas serial (output din master);
- MOSI/SIMO - Master Output, Slave Input (output din master);
- MISO/SOMI - Master Input, Slave Output (output din slave);
- SS - Slave Select (active low; output din master).
Interfaa SPI poate opera cu un singur dispozitiv master i unul sau mai
multe dispozitive slave.
Dac un singur dispozitiv slave este utilizat, pinul pentru SS poate fi setat
pe nivelul logic "low"("jos") dac dispozitivul permite. Unele slave-uri necesit
pentru selecie, "falling edge" (tranziie de la nivelele nalt/highjoas/low) al
slave-selectului pentru a iniia o aciune, precum circuitul ADC (convertor
analogic-digital), care ncepe conversia la tranziia respectiv. n cazul existenei
mai multor dispozitive de tip slave, un semnal SS independent este necesar de la
master pentru fiecare dispozitiv (circuit) digital slave.
Majoritatea dispozitivelor slave au trei stri logice (en. tri-state), aa c
semnalul MISO devine "deconectat" (ieire n gol) atunci cnd dispozitivul nu
este selectat. Dispozitivele fr trei stri logice nu pot mpri (nu pot participa la)
NECLASIFICAT
NECLASIFICAT
Pagina 119 din 143
magistrala SPI cu alte dispozitive; doar acele slave-uri pot comunica cu master-ul
i doar dac au activat chip-selectul.
Pentru a ncepe comunicarea, master-ul mai nti configureaz ceasul,
folosind o frecven mai mic sau egal cu maximul frecvenei suportata de slave.
Aceste frecvene sunt de obicei n intervalul 1-70 MHz. Atunci master-ul seteaz
slave select-ul pe nivelul 'jos' (en. low) pentru chip-ul dorit. Dac este necesar o
perioada de ateptare (ca la conversia analog-digital) atunci master-ul ateapt
cel puin acea perioad de timp nainte de a ncepe ciclurile de ceas.
n timpul fiecrui ciclu de ceas SPI, apare o transmisie full duplex:
- master-ul trimite un bit pe linia MOSI; slave-ul l citete de pe aceeai linie;
- slave-ul trimite un bit pe linia MISO; master-ul l citete de pe aceeai linie.
Nu toate transmisiile de date necesita toate aceste operaii (de ex.
transmisia unidirecional), dei acestea se petrec.
n mod normal, transmisia implic existena a doi regitri de date de o
lungime oarecare a cuvntului, cum ar fi opt bii, unul situat n dispozitivul master
i celalalt n dispozitivul slave; ei sunt conectai ntr-o configuraie de tip inel.
Informaia este de obicei transferata ncepnd cu cel mai semnificativ bit (en:
Most Significant Bit - MSB), si continund bit cu bit pn se transfer i cel mai
nesemnificativ bit (eng: Least Significant Bit - LSB) pentru acelai registru. n
aceast faz, putem afirma c cele dou dispozitive master/slave i-au schimbat
valorile din regitri. Imediat dup, fiecare dispozitiv citete valoarea stocat n
registrul de date i o prelucreaz, cum ar fi scrierea ntr-o locatie de memorie.
Daca mai sunt date de schimbat, regitrii de schimb sunt ncrcai cu noi date i
procesul se repeta.
Transmisiile pot include un numr arbitrar de cicluri de ceas. Cnd
transmisia datelor s-a ncheiat, master-ul oprete comutarea ceasului. n mod
normal, are loc i deselectarea slave-ului prin intermediul liniei de selecie
dedicate. Adesea transmisiile sunt de cuvinte a opt bii, i master-ul poate iniia
multiple transmisii dac are nevoie. Cu toate astea, alte mrimi ale cuvntului
sunt obinuite, cum ar fi cuvinte de 16 bii pentru controller-ul de touch-screen
sau codec-uri audio; sau cuvinte de 12 bii pentru diverse convertoare
digital-analogice sau convertoare analog-digitale.
Fiecare slave de pe magistral care nu a fost activat folosind slave
select-ul aferent, nu trebuie s ia in considerare semnalul de ceas precum i datele
de pe linia MOSI i s nu transmit nimic pe linia MISO. Master-ul trebuie s
selecteze doar un slave la un moment dat.
NECLASIFICAT
NECLASIFICAT
Pagina 120 din 143
n plus fa de setarea frecvenei ceasului, master-ul trebuie s configureze
polaritatea i faza ceasului respectnd datele. Aceste dou opiuni au fost numite
CPOL si CPHA n Freescale's SPI Block Guide, iar cei mai muli productori
le-au adoptat.
Timpul este descris mai jos i se aplic att dispozitivelor master cat i
celor slave.
- La CPOL=0 valoarea ceasului este zero
o Pentru CPHA=0 data este capturat pe tranziia jossus i este
propagat pe tranziia susjos a ceasului.
o Pentru CPHA=1, data e capturat pe tranziia susjos si propagat pe
tranziia jossus.
- La CPOL=1 valoarea ceasului este unu
o Pentru CPHA=0 data e capturat pe tranziia susjos a ceasului si
propagat pe tranziia jossus.
o Pentru CPHA=1 data e capturat pe tranziia jossus i propagat pe
tranziia susjos.
Cu valoarea CPHA=0 data trebuie s fie stabil o jumtate de ciclu nainte
de primul ciclu de ceas. Pentru toate modurile CPOL si CPHA, valoarea iniial a
ceasului trebuie s fie stabil nainte ca chipul s selecteze linia activ.
NECLASIFICAT
NECLASIFICAT
Pagina 121 din 143
5.4. Descrierea modului de comunicare i control al memoriei cu
microcontroller-ul prin interfaa SPI
Deoarece pinul Serial Clock (SCK) este mereu o intrare, memoria
AT25M01 opereaz ntotdeauna drept Slave
[10]
, funcia de Master fiind atribuit
dispozitivului care genereaz semnalul de ceas, n cazul nostru microcontrollerul.
Figura 5.4. Schema bloc a conexiunii chip-urilor de memorie utilizate
Memoria are pini separai destinai pentru transmisia de date (SO) i
recepia acestora (SI), cel care este transmis i recepionat primul fiind cel mai
semnificativ bit (MSB).
Dup ce Chip Select-ul (
) este setat pe low (jos), primul octet va fi
recepionat, acesta coninnd codul operaiei ce urmeaz a fi efectuat. Dac se
primete un cod operaional invalid, nu se vor transfera date n memorie, i pinul
de ieire serial (SO) va rmne ntr-o stare de impedan ridicat (nu va transmite
nici un semnal) pn cnd este detectat din nou tranziia high to low (sus-jos)
a
, lucru care va reiniializa comunicaia serial.
NECLASIFICAT
NECLASIFICAT
Pagina 122 din 143
Pinul
este utilizat mpreun cu pinul
pentru selecia memoriei.
Cnd dispozitivul este selectat i o secven serial este n curs de desfurare,
pinul
poate fi utilizat pentru a face o pauz n comunicaia cu dispozitivul
Master fr a reseta secvena serial. Pentru a face o pauz, pinul
trebuie
adus n starea low n timp ce pinul SCK este tot n starea low. Pentru a relua
comunicaia, pinul
trebuie adus n starea high n timp ce pinul SCK este
low. Intrrile pinului SI vor fi ignorate ct timp pinul SO este n starea de
impedan ridicat.
Pinul Write Protect (
) permite realizarea operaiilor normale de
scriere/citire ct timp este n starea high. Cnd acest pin este adus n starea
low, si bitul WPEN este 1, toate operaiile de scriere a registrului de stare sunt
inhibate. Punerea
n starea low n timp ce
este low va ntrerupe
scrierea n registrul de stare. Dac ciclul de scriere intern a fost deja iniiat,
trecerea
n starea low nu va avea nici un efect asupra oricrei scrieri n
registrul de stare. Funcia pinului
este blocat cnd bitul WPEN este 0 n
registrul de stare. Acest lucru permite utilizatorului s instaleze memoria
AT25M01 ntr-un sistem cu pinul
legat la mas i nc s poat s scrie n
registrul de stare. Toate funciile pinului
sunt activate cnd bitul WPEN este
setat pe 1.
Figura 5.5. Transmiterea sincron a datelor
Memoria este destinat s comunice direct cu interfaa SPI a
microcontrollere-lor. AT25M01 utilizeaz un registru de instruciuni pe 8 bii.
Lista instruciunilor i a codurilor operaionale ale acestora este prezentat n
tabelul 5.1. Toate instruciunile, adresele i datele sunt transferate ncepnd cu cel
mai semnificativ bit (MSB) i ncep cu o tranziie high-to-low a pinului
.
NECLASIFICAT
NECLASIFICAT
Pagina 123 din 143
Write Enable (WREN) - activarea scrierii: dispozitivul va trece n starea
de dezactivare a scrierii cand este aplicat o tensiune continu. Prin urmare toate
instruciunile de programare trebuie s fie precedate de o instruciune Write
Enable.
Figura 5.6. Diagrama de timp a WREN
Write Disable (WRDI) dezactivarea scrierii: pentru protejarea
dispozitivului mpotriva scrierilor inadvertente, instruciunea de dezactivare a
scrierii dezactiveaz toate modurile de programare. Instruciunnea WRDI este
independent de starea pinului
.
Figura 5.7. Diagrama de timp a WRDI
NECLASIFICAT
NECLASIFICAT
Pagina 124 din 143
Read Status Register (RDSR) citirea registrului de stare: aceast
instruciune ofer accesul la registrul de stare. Strile Ready/Busy
(pregtit/ocupat) i Write Enable ale dispozitivului pot fi determinate cu ajutorul
instruciunii RSDR.
Figura 5.8. Diagrama de timp a RDSR
Write Status Register (WRSR) scrierea registrului de stare: aceast
instruciune permite userului s selecteze una din cele patru nivele de protecie.
De asemenea, instruciunea WRSR permite utilizatorului s activeze sau s
dezactiveze pinul
prin utilizarea bitului WPEN.
Figura 5.9. Diagrama de timp a WRSR
Read Sequence (READ) secvena de citire: pentru citirea memoriei prin
pinul SO , dup ce se aduce
n 0, codul operaional de citire este transmis prin
linia SI urmat de 3 octei de adres pentru citire. Pn la finalizare, orice
informaie de pe linia SI va fi ignorat. Datele de la adresele specificate sunt apoi
mutate pe linia de ieire SO. Dac se dorete citirea unui singur octet, pinul
trebuie pus n starea high dup ieirea datelor. Secvena de citire poate fi
continuat din moment ce octetul de adres este incrementat automat i datele
continu s fie mutate pe linia de ieire. Cnd se ajunge la ultima adres, contorul
NECLASIFICAT
NECLASIFICAT
Pagina 125 din 143
de adres va reveni la prima adres permind ntregii memorii s fie citit
ntr-un singur ciclu de citire.
Figura 5.10. Diagrama de timp a secvenei de citire
Write Sequence (Write) secvena de scriere: pentru aceasta este necesar
execuia a dou instruciuni diferite. Mai nti dispozitivul trebuie s fie activat
pentru scriere prin instruciunea WREN. Apoi poate fi executat o instruciune de
scriere. De asemenea, pentru programarea adresei locului din memorie este
necesar ca aceasta s nu se gseasc printre adresele locurilor din memorie
selectate de nivelul de protecie a scrierii. Pe timpul unui ciclu intern, toate
comenzile sunt ignorate cu excepia instruciunii RDSR.
O instruciune de scriere necesit urmtoarea secven: dup ce linia
este trecut n starea low pentru a selecta dispozitivul, codul operaional de
scriere este transmis pe linia SI urmat de adresa locului de memorie i de datele
care trebuiesc nregistrate. nregistrarea va ncepe dup ce
va trece n starea
high.
Figura 5.11. Diagrama de timp a secvenei de scriere
Starea pregtit/ocupat a dispozitivului poate fi determinat prin ininierea
unei instruciuni RDSR. Dac bitul 0=1, ciclul de scriere este nc n desfurare,
iar dac bitul 0=0; ciclul de scriere a fost finalizat. Singura instruciune activat
pe timpul ciclului de scriere este RDSR.
Dup finalizarea unui ciclu de scriere, memoria este readus n starea de
scriere dezactivat.
NECLASIFICAT
NECLASIFICAT
Pagina 126 din 143
5.5. Interfaa sistemului cu echipamentul de sol
nregistrarea parametrilor de zbor ai aeronavei, ar fi lipsit de sens dac
procesul nu s-ar continua cu interpretarea ulterioar a acestora. Interpretarea
datelor nregistrate nu trebuie s se fac doar n cazul producerii unei catastrofe
pentru a determina cauzele, ci i dup fiecare aterizare, n scop profilactic.
Dac n cazul producerii unui accident citirea datelor se poate face prin
accesul direct la chip-urile de memorie din nregistrator, pentru majoritata
cazurilor cnd interpretarea se face dup aterizare, este neaprat necesar ca
nregistratorul s fie prevzut cu o interfa pentru comunicarea cu echipamentele
de decodificare i interpretare de la sol.
Microcontroller-ul ATxmega128B3 dispune de mai multe posibiliti de
realizare a interfarii precum USART (Universal Synchronous/Asynchronous
Receiver/Transmitter, categorie din care fac parte interfeele RS-232,RS-422,.a.)
i USB (Universal Serial Bus).
[10]
Pentru realizarea cii de comunicare dintre nregistrator i dispozitivele de
la sol, am decis s utilizez interfaa USB deoarece face parte dintr-o generaie
nou, care ofer unele avantaje, cum ar fi viteza de transfer ridicat. Interfaa
utilizat cu precdere pn la apariia USB-ului, RS-232, i-a pierdut din
popularitate, singura justificare pentru utilizarea unei astfel de interfee fiind
preul redus i simplitatea.
Figura 5.12. Schema bloc a modului de comunicare cu echipamentul de la sol
Magistrala USB transfer semnalele i tensiunea de alimentare pe un cablu
cu patru fire, ilustrat n figura 5.13. Semnalele difereniale de date se transmit pe
liniile D+ i D, formate din dou fire rsucite. Semnalul de ceas este transmis
codificat mpreun cu datele. Codificarea utilizat este numit NRZI (Non Return
to Zero Invert). n cazul acestei metode, biii de 1 i 0 sunt reprezentai prin
tensiuni opuse i alternante nalte i joase, fr a exista revenirea la tensiunea de
NECLASIFICAT
NECLASIFICAT
Pagina 127 din 143
referin (zero) ntre biii codificai. Sunt inserai bii suplimentari pentru a asigura
tranziii suficiente ale semnalelor transmise. Fiecare pachet de date este precedat
de un cmp de sincronizare pentru a permite receptorilor sincronizarea ceasurilor
de recepie.
Figura 5.13. Cablu USB
Cablul USB transmite i tensiunea de alimentare pentru periferice pe
liniile VBUS i GND. Tensiunea pe linia VBUS este de +5 V la surs. Pentru a
asigura nivele de tensiune garantate la intrarea perifericelor i o impedan de
terminare corespunztoare, se utilizeaz terminatori la fiecare capt al cablului.
Terminatorii permit de asemenea detectarea conectrii sau deconectrii unui
periferic i permit diferenierea ntre perifericele cu vitez ridicat i cele cu vitez
redus.
Perifericele se conecteaz la o muf cu patru pini dintr-un distribuitor
utiliznd o fi rectangular de tip A (figura 5.14.). Toate cablurile care sunt
ataate permanent la periferice dispun de o fi de tip A. Perifericele care
utilizeaz un cablu separat au o muf ptrat de tip B, iar cablul care conecteaz
aceste periferice dispune de o fi de tip A i una de tip B.
Figura 5.14. Fie i mufe utilizate la cablurile USB
Interfaa USB a microcontroller-ului ales are urmtoarele caracteristici:
- interfa USB 2.0 cu vitez de transfer ridicat (12 Mb/s) sau joas
(1,5 Mb/s);
- emitor-receptor USB integrat n microcontroller, nu necesit
componente adiionale;
- 16 adrese de terminale cu flexibilitate maxim pentru pn la 31 de
terminale;
NECLASIFICAT
NECLASIFICAT
Pagina 128 din 143
- Tipurile de transfer selectabile ca:
o de control;
o de date voluminoase;
o de ntrerupere;
o izocrone;
- dimensiunea datelor configurabil pentru fiecare terminal, pn la 1023
de octei;
- configurarea terminalelor i buffer-ele de date sunt localizate n memoria
intern SRAM;
o locaie configurabil pentru datele de configurare ale terminalului;
o locaie configurabil pentru buffer-ul de date al fiecrui terminal;
- selecia ceasului este independent de cea a ceasului sistemului;
- semnal de ceas de minim 1.5 MHz pentru operaiile cu vitez mic ;
- semnal de ceas de minim 12 MHz pentru operaiile cu vitez maxim;
- posibiliti de depanare pe chip n timpul transferurilor pe USB.
Protocolul magistralei
Toate transferurile sunt iniiate de controlerul USB al calculatorului
gazd. Tranzaciile de pe magistral implic transmisia a pn la trei pachete.
Fiecare tranzacie ncepe n momentul n care controlerul USB transmite, pe baza
unei planificri, un pachet care descrie tipul tranzaciei, direcia acesteia i adresa
dispozitivului USB. Dispozitivul USB adresat se selecteaz prin decodificarea
cmpului de adres corespunztor. Sursa tranzaciei transmite apoi un pachet de
date sau indic faptul c nu are date de transmis. Destinaia rspunde, n general,
cu un pachet indicnd dac transferul s-a efectuat cu succes.
Modelul transferului de date ntre o surs sau destinaie de pe calculatorul
gazd i un dispozitiv USB poart numele de conduct (pipe). n general,
transferul de date dintr-o conduct este independent de fluxul de date din alte
conducte. Un anumit dispozitiv USB poate avea mai multe conducte asociate.
Exist dou tipuri de conducte: iruri i mesaje. Spre deosebire de datele
dintr-un mesaj, datele dintr-un ir nu au o structur definit de specificaiile USB.
n plus, conductelor li se asociaz rata de transfer a datelor, tipul serviciului de
transfer i caracteristicile dispozitivului destinaie, ca dimensiunile bufferelor.
Majoritatea conductelor sunt create la configurarea unui dispozitiv USB. Dup
punerea n funciune a unui dispozitiv, se creeaz o conduct implicit de tip
mesaj pentru a permite accesul la informaiile de configurare, stare i control ale
dispozitivului.
Planificarea tranzaciilor permite controlul fluxului de date pentru anumite
conducte de tip ir. La nivel hardware, aceasta previne apariia umplerii sau golirii
bufferelor prin utilizarea confirmrii negative NAK (Negative Acknowledge)
pentru a ajusta rata de transfer. n cazul unei confirmri negative, o tranzacie este
reluat atunci cnd magistrala devine disponibil. Mecanismul de control al
NECLASIFICAT
NECLASIFICAT
Pagina 129 din 143
fluxului de date permite realizarea unor planificri flexibile. Astfel, conducte
multiple pot fi deservite la intervale diferite i cu pachete de dimensiuni diferite.
Tipuri de transfer
Arhitectura USB cuprinde patru tipuri de transferuri de date: de control,
de date voluminoase, de ntrerupere i izocrone.
Transferurile de control se utilizeaz de driverele calculatorului gazd
pentru configurarea dispozitivelor care sunt ataate la sistem. Alte drivere pot
utiliza transferuri de control n moduri specifice implementrii.
Transferurile de date voluminoase se utilizeaz cu periferice cum sunt
imprimante sau scanere. Aceste date sunt secveniale. Fiabilitatea transferurilor
este asigurat la nivel hardware prin utilizarea unui cod detector de erori i
reluarea unui transfer cu erori de un numr de ori. Rata de transfer n cazul acestor
transferuri poate varia n funcie de alte activiti de pe magistral.
Transferurile de ntrerupere se utilizeaz pentru date cu volum redus.
Transferul acestor date poate fi solicitat de un dispozitiv n orice moment, iar rata
de transfer pe magistrala USB nu poate fi mai redus dect cea specificat de
dispozitiv. Datele pentru care se utilizeaz transferurile de ntrerupere constau din
notificarea unor evenimente, din caractere sau coordonate care sunt organizate pe
unul sau mai muli octei. Un exemplu l reprezint coordonatele de la un
dispozitiv indicator (mouse, tablet grafic). Datele interactive pot avea anumite
limite ale timpului de rspuns care trebuie asigurate de magistrala USB.
Transferurile izocrone (isos egal, chronos timp) se utilizeaz pentru
datele care trebuie furnizate cu o anumit rat de transfer constant i a cror
sincronizare trebuie garantat. Izocron are semnificaia cu durat egal sau
care apare la intervale regulate. Datele izocrone sunt generate n timp real i
trebuie furnizate cu rata cu care sunt recepionate pentru a pstra sincronizarea
lor. Pe lng rata de transfer impus, pentru datele izocrone trebuie respectat i
ntrzierea maxim cu care Sisteme de I/E - Magistrale seriale 9 acestea sunt
furnizate. Furnizarea la timp a datelor izocrone este asigurat cu preul unor
pierderi poteniale n irul de date. Cu alte cuvinte, erorile de transmisie nu sunt
corectate prin mecanisme hardware, de exemplu, prin retransmiterea lor. n
concluzie, transferurile izocrone se caracterizeaz prin furnizarea la timp a datelor
i prin lipsa retransmiterii lor n cazul unor erori, deoarece datele ntrziate nu mai
sunt utile. Spre deosebire de transferurile izocrone, transferurile asincrone se
caracterizeaz prin faptul c fiabilitatea transmiterii datelor este mai important
dect asigurarea sincronizrii. Pentru aceasta se utilizeaz retransmiterea datelor
n cazul unor erori, chiar dac apar ntrzieri din aceast cauz.
irurilor de date izocrone li se aloc o poriune dedicat a limii de band
a magistralei USB. De asemenea, aceast magistral este proiectat pentru o
ntrziere minim a transferurilor de date izocrone.
NECLASIFICAT
NECLASIFICAT
Pagina 130 din 143
6. Realizare experimental
Pentru a exemplifica o mic parte din procesul de achiziie i de prelucrare
a semnalelor n vederea nregistrrii, am realizat un sistem de achiziie a
temperaturii cu ajutorul unui termocuplu de tip T, iar datele achiziionate pot fi
ulterior transmise prin intermediul interfeei seriale RS-232.
Sistemul este compus din:
- senzor de temperatur Termocuplu de tip T;
- amplificator de tensiune INA122P;
- microcontroller ATmega32;
- afior cu 7 segmente, 3 digii;
- circuit integrat pentru transmiterea pe serial a datelor MAX232;
- conector DB-9;
- convertor capsulat de tensiune DCW08B-05.
Figura 6.1. Poza circuit fa
NECLASIFICAT
NECLASIFICAT
Pagina 131 din 143
Figura 6.2. Poza circuit verso
Decrierea modului de funcionare:
Achiziia temperaturii se face cu ajutorul unui termocuplu de tip T.
Termocuplu este un senzor alctuit din dou metale diferite, utilizat pentru
msurarea temperaturii. Acesta funcioneaz pe baza efectului Seebeck, care
conduce la formarea unei diferene de potenial electric pe baza unei diferene de
potenial termic. Diferena de potenial este cauzat de faptul c electronii de
conducie din captul cu temperatura mai mare au o energie cinetic mai mare i
vor difuza ctre captul mai rece. n acest fel captul cald se va ncrca pozitiv,
iar captul rece al firului se va ncrca negativ.
Termocuplul de tip T poate msura temperaturi cuprinse ntre -200 i
+400
o
C, oferind semnale proporionale cu temperatura msurat, n gama
-6mV20mV.
Semnalele oferite de acesta sunt foarte mici, fiind necesar o amplificare
a acestora pentru a putea fi convertite de ctre convertorul analog-numeric al
microcontroller-ului utilizat. Se impune astfel aducerea tensiunilor oferite de
senzor n gama 05V, sau n cazul unei referine de 2,56V n gama 02,56V.
Pentru amplificarea semnaluilui am utilizat un amplificatorul INA122p
produs de firma BurrBrown. Acesta ofer un ctig cuprins ntre 5 i 10000.
Ctigul poate fi selectat prin legarea unei rezistene exterioare. Determinarea
valorii rezistenei necesare pentru ctigul dorit se face cu ajutorul relaiei:
= 5 +
200
=
200
5
.
NECLASIFICAT
NECLASIFICAT
Pagina 132 din 143
Pentru a aduce semnalul din gama 020,876 mV n gama 02.56V avem
nevoie de un ctig G=123, deci trebuie s legm o rezisten de 1,69k. Valorile
standard cele mai apropiate rezistene sunt de 1,5 k sau de 1,8 k. Pentru
rezistena de 1,5 k ctigul va fi mai mare, iar tensiunile de peste 18 mV n urma
amplificrii ies din gama 05V pe care o poate citi ADC-ul, deci vom putea citi
temperaturi de pn la 355
o
C. n concluzie putem folosi rezistena de 1,8 k
pentru a acoperi toat plaja de valori oferite de termocuplu, sau putem nseria sau
lega n paralel rezistene cu diferite valori a cror rezisten echivalent s fie
1,69 k, pentru un ctig precis.
Microcontroller-ul utilizat dispune de un convertor analog-numeric intern,
cu o rezoluie de 10 bii, lucru care ne permite s sesizm o diferen de 0,4
o
C. Cu
toate acestea, productorul termocuplului specific faptul c sensibilitatea
senzorului este de numai 1
o
C. Avnd n vedere c rezoluia ADC-ului ne-ar
permite s sesizm i diferenele de 0,4
o
C nseamn c nu vom altera calitatea
informaiei oferite de senzor, cum s-ar fi nmplat de exemplu n cazul unui
convertor pe 8 bii, care ar fi oferit o precizie de 1,56
o
C.
Caracteristica termocuplului este prezentat n graficul urmtor:
Figura 6.3. Caracteristica termocuplului T[
o
C](U [mV])
Se observ c graficul temperaturii n funcie de tensiune nu are o form
perfect liniar. Prim metoda aproximrii erorii ptratice minime am cutat un
polinom al crui grafic s treac printre punctele de referin, criteriul alegerii
coeficienilor polinomului fiind ca suma ptratelor diferenelor dintre ordonata
punctelor de referin i ordonata calculat pe baza ecuiei polinomiale
y = 19,313x + 14,383
0
50
100
150
200
250
300
350
400
0 2 4 6 8 10 12 14 16 18 20
T
e
m
p
e
r
a
t
u
r
a
[
C
]
Tensiunea [mV]
Caracteristica T C(U mV)
Caracteristica Temp(U)
Linear (Caracteristica Temp(U))
NECLASIFICAT
NECLASIFICAT
Pagina 133 din 143
corespunztoare s fie minim. n figura 6.3. se prezint un polinom de gradul
unu, cu alte cuvinte o dreapt de interpolare. Dei precizia poate fi considerat
satisfctoare, vom utiliza un polinom de interpolare de gradul doi, care face o
mai bun aproximare, dup cum se poate vedea n figura 6.4.
Figura 6.4. Caracteristica termocuplului T[
o
C](U [mV])
Modelul matematic utilizat pentru determinarea graficelor aproximate de
mai sus, este prezentat n rndurile urmtoare.
[1]
Mai nti graficul 6.3. :
Fie polinomul de interpolare:
=
++
2
2
+
1
+
0
(6.1)
Definim eroarea ptratic de interpolare:
2
= (
+ +
1
+
0
)
2
(6.2)
Condiia de determinare a coeficienilor a
i
fiind:
= (6.3)
Pentru dreapta de interpolare prezentat n figura 6.3. avem sistemul:
{
1
= (
1
+)
1
2
= (
2
+)
2
= (
+)
(6.4)
Introducnd condiia 6.3. rezult relaia 6.5.:
=
1
=
=1
+2
=1
+
2
+
=1
2
=1
=1
=
y = -0,2157x
2
+ 23,238x + 3,128
0
50
100
150
200
250
300
350
400
0 2 4 6 8 10 12 14 16 18 20
T
e
m
p
e
r
a
t
u
r
a
[
C
]
Tensiunea [mV]
Caracteristica T C(U mV)
Caracteristica Temp(U)
Poly. (Caracteristica Temp(U))
NECLASIFICAT
NECLASIFICAT
Pagina 134 din 143
Pentru determinarea coeficienilor dreptei se introduc condiiile de
derivat nul, respectiv:
{
2
=1
+
=1
=1
= 0
=1
+
=1
= 0
(6.6)
Pentru punerea n eviden a formei generale a sistemului de ecuaii din
care rezult coeficienii polinomului de interpolare sistemul 6.6. poate fi scris sub
forma matriceal:
[
2
=1
=1
=1
] [
] = [
=1
=1
] (6.7.)
Prin rezolvarea sistemului (6.7.) se vor obine coeficienii dreptei de
interpolare A i B.
Pentru graficul 6.4. se utilizeaz un polinom de gradul 2. Expresia erorii
ntr-un punct al graficului de etalonare este dat de relaia:
= (
2
+
+)
(6.8.)
Suma erorii ptratice fiind:
=
1
=
2
=1
+ 2
=1
+(
2
+2)
=1
+2
=1
=1
=1
+
2
2
=1
+
=1
=
Pentru minimizarea expresiei E derivm succesiv n raport cu A,B,C
sistemul rezultat fiind scris sub forma matriceal astfel:
[
=1
=1
=1
=1
=1
=1
=1
=1
] =
[
=1
=1
=1
]
Pentru afiarea temperaturii utilizez un afior cu 3 digii compusi fiecare
din 7 segmente.Avnd n vedere c gama de variaie temperaturii pa care o putem
msura este de 0400
o
C, cei 3 digii sunt suficieni.
Controlul afiorului se realizeaz cu ajutorul microcontroller-ului
ATmega32, codul programului necesar fiind anexat n ANEXA 1.
Deoarece la bordul aeronavei n afar de afiarea temperaturilor are loc i
nregistrarea acestora, am considerat util realizarea comunicrii dispozitivului cu
alte dispozitive prin intermediul interfeei seriale RS-232.
(6.9.)
(6.10.)
NECLASIFICAT
NECLASIFICAT
Pagina 135 din 143
Microcontroller-ul ales nu dispune de un circuit integrat n structura
proprie pentru realizarea comunicrii prin magistrala serial, este necesar
utilizarea unui circuit extern. Acesta este MAX232, un circuit integrat care
converteste semnalele de la un port serial RS-232 n semnale potrivite pentru
nivelul TTL i viceversa. MAX232 este un circuit dual driver/receiver care
converteste de obicei semnale precum RX, TX, CTS i RTS . Funcia de driver
asigur conversia semnalului de la nivelul TTL 5V la nivelul RS-232 (aprox.
7.5 V) . Funcia de receiver este operaia invers.
NECLASIFICAT
NECLASIFICAT
Pagina 136 din 143
7. Concluzii
n lucrarea de fa am realizat Proiectarea unui nregistrator de bord cu
memorii semicondutoare de tip EEPROM pentru avioane supersonice utiliznd
drept referin aeronava de vntoare MiG-29 care s-a aflat n nzestrarea Forelor
Aeriene ale Romniei.
Primul aspect pe care l-am tratat a fost rolul echipamentelor de nregistrare
a parametrilor de zbor n contextul avionicii moderne, am trecut n revist evoluia
tehnic a sistemelor digitale de nregistrare, am stabilit locul i atribuiile
funionale ale acestora, am prezentat standardele n vigoare, reuind astfel s
stabilesc direciile principale care trebuiesc urmrite n proiectarea sistemului.
n urmtorul capitol am vizat stabilirea parametrilor achiziionai,
analiznd mai nti reglementrile cu referire la parametrii care trebuie
nregistrai, i ulterior echipamentele i sistemele principale de care dispune
aeronava. La finele capitolului am reuit s stabilesc un set de parametri pe care
i consider indispensabili n vederea analizei zborului.
Capitolul 3 este destinat stabilirii procesrilor de date aferente nregistrrii
de date. Am analizat mai nti modul de achiziie al semnalelor, att n general,
ct i particularizat pentru fiecare tip de traductor i parametru achiziionat,
analiza fiind urmat de stabilirea modului de transformare a informaiilor din
formatul analogic n formatul digital.
n capitolul 4 am reuit s realizez schema bloc a ntregului sistem , ct i
a subsistemelor componente, i am calculat necesarul de memorie n funcie de
specificul aeronavei. Ulterior, am stabilit n detaliu componentele hardware
necesare pentru materializarea unui astfel de sistem, am descris caracteristicile
fiecrei componente i am justificat alegerile fcute.
Lucrarea continu cu prezentarea modului n care componentele ce
alctuiesc sistemul comunic ntre ele. Am descris tipurile de interfee utilizate
pentru comunicarea dintre echipamentele de la bordul aeronavei, ct i interfaa
de comunicare a aeronavei cu echipamentele de sol. Mai mult dect att, am
prezentat modul de formare a datelor i felul n care acestea sunt transmise prin
intermediul magistralelor.
Aplicaia practic pe care am ntocmit-o are rolul de a exemplifica nu doar
modul de achiziie, ci i o mare parte din prelucrarea semnalului semnalului n
vederea nregistrrii, sau de ce nu, a utilizrii acestuia n vederea automatizrii
unor comenzi ale subsistemelor din componena aeronavei. Consider c realizarea
NECLASIFICAT
NECLASIFICAT
Pagina 137 din 143
practic poate fi folosit n scop didactic n cadrul orelor de laborator ale cursului
de Echipamente de nregistrare a parametrilor de zbor.
Pe parcursul realizrii proiectului am reuit s aprofundez cunotinele
despre echipamentele de nregistrare a parametrilor, despre diversele tipuri de
senzori i traductoare utilizate n domeniul aeronautic, ct i modul de prelucrare
i utilizare a innformaiilor oferite de acestea.
Principalele contribuii aduse sub aspect tiinific de prezenta lucrare sunt
urmtoarele:
- realizarea schemei de funcionare a unui nregistrator digital de date, n
concepie propie, n care sunt puse n eviden principiul multiplexrii, al
eantionrii, al conversiei analog-numerice i utilizarea protocoalelor pentru
transmisia datelor;
- realizarea pracica a unui circuit de achiziie asemntor celor utilizate pe
aeronave, transmitere datelor pe serial i afiarea pe un display cu 3 digii
compui din apte segmente a temperaturii;
Ca direcie de dezvoltare, doresc s mbuntesc schemele bloc ale
subsistemelor n vederea reducerii numrului de componente utilizate, avnd n
vedere c industria aeronautic s-a dezvoltat foarte mult n segmentul aeronavelor
fr pilot, segment n care se urmrete minimalizarea dimensiunilor, precum i a
costurilor. De asemenea, intenionez s extind aplicaia practic pentru a
exemplifica toate tipurile de semnale achiziionate i modul de prelucrare al
acestora.
n ncheiere, doresc s reamintesc importana sistemelor de nregistrare la
bordul aeronavei, i s menionez c studierea acestui domeniu este foarte
important pentru a nelege ce se petrece cu aeronava n timpul zborului.
NECLASIFICAT
NECLASIFICAT
Pagina 138 din 143
Bibliografie:
[1] Jnel Arhip - Echipamente de nregistrare a parametrilor de zbor, Editura
Academiei Tehnice Militare 2003
[2] Ioan Aron - Aparate de bord pentru aeronave, Editura Tehnica, Bucuresi
1984
[3] Gacsdi Alexandru, Tiponu Virgil - Sisteme de achiziii de date, Editura
Universitii din Oradea
[4] Paun V. - Echipamentul electric al aeronavelor, Editura Didactic i
Pedagogic, Bucuresi ,1980
[5] Documentaia tehnic a avionului MiG-29
[6] Notiele de curs
[7] http://www.honeywell.com/sites/aero/Recorders.htm
[8] http://www.arinc.com/sectors/aviation
[9] http://ro.wikipedia.org/wiki/Mikoian-Gurevici_MiG-29
[10] Datasheet:
- Atmel AT25M01
- Atmel ATxmega128B3
- INA122P
- MAX232
NECLASIFICAT
NECLASIFICAT
Pagina 139 din 143
ANEXA 1 - Codul de programare al Controller-ului ATmega32
*****************************************************
This program was produced by the
CodeWizardAVR V1.25.9 Professional
Automatic Program Generator
Chip type : ATmega32
Program type : Application
Clock frequency : 11,059200 MHz
Memory model : Small
External SRAM size : 0
Data Stack size : 512
*****************************************************/
#include <mega32.h>
#include <delay.h>
#include <math.h>
#include <stdio.h>
#define AFISOR PORTC
#define CS3 PORTA.7
#define CS2 PORTA.5
#define CS1 PORTA.3
#define coeficient1 0.7092
#define coeficient2 14.6896
#define coeficient3 3.128
/*
#define coeficient1 1.2564
#define coeficient2 0.9151
*/
bit TxBusy = 0, flag_adc_have_data = 0;
int digit0 = 0, digit1 = 0, digit2 = 0, cnt = 0;
unsigned int Vadc = 0;
//float temperatura = 0;
int temp = 0, suma =0;
char SendText[64],TxCount;
enum numere
{
ZERO = 0,
UNU = 1,
DOI = 2,
TREI = 3,
PATRU = 4,
CINCI = 5,
SASE = 6,
SAPTE = 7,
OPT = 8,
NOUA = 9,
EROARE = 10
};
flash unsigned char digit[11] =
{
0b00000001,//ok zero
NECLASIFICAT
NECLASIFICAT
Pagina 140 din 143
0b11101101,//ok unu
0b10100010,//ok doi
0b00101000,//ok trei
0b01001100,//ok patru
0b00011000,//ok cinci
0b00010000,//ok sase
0b10101101,//ok sapte
0b00000000,//ok opt
0b00001000,//ok noua
0b11111110 //ok eroare
};
void afisare(int a)
{
if (a >= 0 && a <= 999)
{
digit0 = a%10;
digit1 = (a/10)%10;
digit2 = (a/100)%10;
}
else
{
digit0 = EROARE;
digit1 = EROARE;
digit2 = EROARE;
}
}
void SendTextUART(char *text)
{
int i;
while(TxBusy);
if(*text)
{
UDR = *text;
for(i =1; text[i]; i++)
SendText[i] = text[i];
SendText[i] = 0;
TxCount = 1;
TxBusy = 1;
}
}
void print_f(flash char *text)
{
int i;
while(TxBusy);
if(*text)
{
UDR = *text;
for(i =1; text[i]; i++)
SendText[i] = text[i];
SendText[i] = 0;
TxCount = 1;
TxBusy = 1;
}
NECLASIFICAT
NECLASIFICAT
Pagina 141 din 143
}
void calc_temp(unsigned int adc)
{
char text[52];
sprintf(text,"adc = %d\r",adc);
SendTextUART(text);
temp = (float)(coeficient1 * suma) + coeficient2;
//temp = (float) coeficient1 * pow((float)suma,coeficient2);
sprintf(text,"temp = %u\r",temp);
SendTextUART(text);
afisare(temp);
}
interrupt [USART_RXC] void usart_rx_isr(void)
interrupt [USART_TXC] void usart_tx_isr(void)
{
if (SendText[TxCount])
{
UDR = SendText[TxCount];
TxCount++;
}
else TxBusy = 0;
}
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
static unsigned char state = 0;
state %= 3;
switch (state)
{
case 0:
CS2 = 0;
CS3 = 0;
CS1 = 1;
AFISOR = digit[digit0];
state++;
break;
case 1:
CS1 = 0;
CS3 = 0;
CS2 = 1;
AFISOR = digit[digit1];
state++;
break;
case 2:
CS1 = 0;
CS2 = 0;
CS3 = 1;
AFISOR = digit[digit2];
state++;
break;
}
}
interrupt [TIM0_COMP] void timer0_comp_isr(void)
{
CS1 = 0;
NECLASIFICAT
NECLASIFICAT
Pagina 142 din 143
CS2 = 0;
CS3 = 0;
}
interrupt [ADC_INT] void adc_isr(void)
{
Vadc = ADCW;
flag_adc_have_data = 1;
printf("int");
}
void main(void)
{
char txt[52];
PORTA=0x00;
DDRA=0xA8;
PORTB=0x00;
DDRB=0x00;
PORTC=0x00;
DDRC=0xFF;
PORTD=0x00;
DDRD=0xFF;
TCCR0=0x03;
TCNT0=0x00;
OCR0=0x80;
TCCR1A=0x00;
TCCR1B=0x05;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
GICR|=0x00;
MCUCR=0x00;
MCUCSR=0x00;
GIFR=0x00;
TIMSK=0x03;
UCSRA=0x00;
UCSRB=0xD8;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x47;
ACSR=0x80;
SFIOR=0x00;
ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0x8F;
// Global enable interrupts
#asm("sei")
sprintf(txt,"ok!\r");
NECLASIFICAT
NECLASIFICAT
Pagina 143 din 143
SendTextUART(txt);
cnt = 32;
ADMUX.0 = 0;
ADMUX.1 = 0;
ADMUX.2 = 0;
ADMUX.3 = 0;
ADCSRA.6 = 1;
while (1)
{
sprintf(txt,"cnt = %d\r",cnt);
SendTextUART(txt);
if (cnt>0 && flag_adc_have_data)
{
suma += Vadc;
print_f("nodata\r");
ADMUX.0 = 0;
ADMUX.1 = 0;
ADMUX.2 = 0;
ADMUX.3 = 0;
ADCSRA.6 = 1;
cnt--;
}
else if (cnt<=0)
{
ADCSRA.6 = 0;
print_f("havedata\r");
suma = suma/32;
calc_temp(suma);
suma = 0;
cnt = 32;
flag_adc_have_data = 0;
ADMUX.0 = 0;
ADMUX.1 = 0;
ADMUX.2 = 0;
ADMUX.3 = 0;
ADCSRA.6 = 1;
}
}
}
S-ar putea să vă placă și
- Curs Sisteme de Navigatie Si DirijareDocument66 paginiCurs Sisteme de Navigatie Si Dirijareyrfly100% (2)
- Sisteme Integrate de Preluare Si Afisare A Informatiilor de BordDocument8 paginiSisteme Integrate de Preluare Si Afisare A Informatiilor de BordAndreea ProdanÎncă nu există evaluări
- Senzori Integrati de PresiuneDocument26 paginiSenzori Integrati de PresiuneParfumeria KelvinCoÎncă nu există evaluări
- Simularea Comportării Dinamice A Unui Motor de Curent ContinuuDocument7 paginiSimularea Comportării Dinamice A Unui Motor de Curent Continuupbarbu_1Încă nu există evaluări
- Siemens Alcatel 2009-Curs 7Document31 paginiSiemens Alcatel 2009-Curs 7Frederick Walker100% (1)
- Lucrare de DiplomaDocument13 paginiLucrare de DiplomaFlori BâldeaÎncă nu există evaluări
- Sistemul SKAYO Pentru Taxare Şi Informare A CălătorilorDocument4 paginiSistemul SKAYO Pentru Taxare Şi Informare A CălătorilorGeorge DinuÎncă nu există evaluări
- Curs Sisteme Integrate de NavigatieDocument49 paginiCurs Sisteme Integrate de Navigatieancaserban88Încă nu există evaluări
- FinalDocument102 paginiFinalRazvanHaragÎncă nu există evaluări
- Teme DAZDocument85 paginiTeme DAZFlorea Maria BiancaÎncă nu există evaluări
- Andrei Badulescu Proiect AutomaticaDocument18 paginiAndrei Badulescu Proiect AutomaticaAndrei GherasimÎncă nu există evaluări
- Automatic Vehicle LocationDocument18 paginiAutomatic Vehicle LocationIulia IaruÎncă nu există evaluări
- Optimizarea Sistemelor de Distributie A Puterii La Bordul AeronavelorDocument73 paginiOptimizarea Sistemelor de Distributie A Puterii La Bordul AeronavelorMarin DanielÎncă nu există evaluări
- Curs EBNADocument26 paginiCurs EBNADan PopaÎncă nu există evaluări
- Senzori Si TraductoareDocument2 paginiSenzori Si TraductoareMihai AndreiÎncă nu există evaluări
- Licenta ABDocument52 paginiLicenta ABAlexandra ChițimușÎncă nu există evaluări
- Senzori de TemperaturaDocument28 paginiSenzori de TemperaturaAndreiValentinÎncă nu există evaluări
- ILS-Instrumental Landing SystemDocument16 paginiILS-Instrumental Landing SystemPaul PopaÎncă nu există evaluări
- Sisteme Electroenergetice de BordDocument86 paginiSisteme Electroenergetice de BordMarin Daniel100% (1)
- Referat RutierDocument14 paginiReferat RutierCristian Mihai MihăilaşÎncă nu există evaluări
- Protocoalele Sistemului SCADADocument7 paginiProtocoalele Sistemului SCADAMihaiBarbuÎncă nu există evaluări
- 1.7 Protocolul HDLC. PRotocolul PPP. Mecanisme de Securizare A Datelor Transmise - PAP Si CHAPDocument7 pagini1.7 Protocolul HDLC. PRotocolul PPP. Mecanisme de Securizare A Datelor Transmise - PAP Si CHAPdorinÎncă nu există evaluări
- Tfab VariometruDocument25 paginiTfab VariometruSimona LazarÎncă nu există evaluări
- Schema Bloc 1Document12 paginiSchema Bloc 1Adrian NaeÎncă nu există evaluări
- Sistemul ILSDocument97 paginiSistemul ILSstefan63byÎncă nu există evaluări
- ProiectDocument29 paginiProiectRazvanHaragÎncă nu există evaluări
- Instalatii de Comanda Si Control A CirculatieiDocument1 paginăInstalatii de Comanda Si Control A CirculatieiCatalin CarstoiuÎncă nu există evaluări
- Masurarea Cantitatii Si Debitului de CombustibilDocument7 paginiMasurarea Cantitatii Si Debitului de CombustibilSorin ChitacuÎncă nu există evaluări
- Semaforizare IntersectieDocument14 paginiSemaforizare IntersectieDenis SimaÎncă nu există evaluări
- TCASDocument15 paginiTCASNicula George100% (1)
- Ioan BuciumanDocument35 paginiIoan BuciumanMIhai Cazacu100% (2)
- Ingineria Reglarii AutomateDocument101 paginiIngineria Reglarii AutomateIancu RobertÎncă nu există evaluări
- Aparat de Zbor Cu o Singura Treapta Aer-AerDocument127 paginiAparat de Zbor Cu o Singura Treapta Aer-AerSp DeniÎncă nu există evaluări
- CAP2 Modulatii DigitaleDocument35 paginiCAP2 Modulatii DigitaleSenciuc LiviuÎncă nu există evaluări
- Lab-01 08Document16 paginiLab-01 08Alexandra-Maria AstefanaoieiÎncă nu există evaluări
- Arhitecturi ITSDocument20 paginiArhitecturi ITSAdrian NaeÎncă nu există evaluări
- Toate EseurileDocument11 paginiToate EseurileCristian Iorga100% (1)
- Spătăreanu Doru Răzvan Proiect MMSDocument15 paginiSpătăreanu Doru Răzvan Proiect MMSDoru SpătăreanuÎncă nu există evaluări
- LECTIA-44-Arduino - GSM GPRS Shield PDFDocument11 paginiLECTIA-44-Arduino - GSM GPRS Shield PDFone_blanche6175Încă nu există evaluări
- Automatizari Feroviare AlstomDocument7 paginiAutomatizari Feroviare AlstomRazvan ComanÎncă nu există evaluări
- TCASDocument45 paginiTCASyrflyÎncă nu există evaluări
- Reteaua CANDocument20 paginiReteaua CANAlexandra AleÎncă nu există evaluări
- Giroorizontul Cu Corectii de Tip Proportional Montat Pe o Platforma Fixa Fata de PamantDocument13 paginiGiroorizontul Cu Corectii de Tip Proportional Montat Pe o Platforma Fixa Fata de PamantElvis ParvoiÎncă nu există evaluări
- Proiect EADocument22 paginiProiect EAVlad OprescuÎncă nu există evaluări
- Suport de Curs-Modelarea Traficului RutierDocument83 paginiSuport de Curs-Modelarea Traficului RutierIosif BaletÎncă nu există evaluări
- 1 Instalatia de Centralizare Electronica ESTW L90Document32 pagini1 Instalatia de Centralizare Electronica ESTW L90ghelmez mihaela100% (2)
- Sistem de Management Si Gestiune A ParcarilorDocument25 paginiSistem de Management Si Gestiune A ParcarilorAdita AditaÎncă nu există evaluări
- Detectia Automata A Depasirii Vitezei Legale Si Aplicarea Masurilor LegaleDocument19 paginiDetectia Automata A Depasirii Vitezei Legale Si Aplicarea Masurilor LegaleBalau Alida IoanaÎncă nu există evaluări
- PMP c01Document30 paginiPMP c01Raluca RaluÎncă nu există evaluări
- Diagnoza Unui Invertor TrifazatDocument8 paginiDiagnoza Unui Invertor TrifazatAdy CristinaÎncă nu există evaluări
- ReteleDocument26 paginiReteleTibi GhinetÎncă nu există evaluări
- Metode de Modelare Si SimulareDocument10 paginiMetode de Modelare Si Simularemaura1993Încă nu există evaluări
- Sistem Inteligent de Transport in Traficul FeroviarDocument4 paginiSistem Inteligent de Transport in Traficul FeroviarAndreiu Catalin100% (1)
- Arhitectura de ComunicatiiDocument4 paginiArhitectura de ComunicatiiJipa_Valentin__85370% (1)
- ArhitecturiDocument9 paginiArhitecturiLucia NegruÎncă nu există evaluări
- TTH 6836 X19Document10 paginiTTH 6836 X19Florea Maria BiancaÎncă nu există evaluări
- ManualFDR PDFDocument142 paginiManualFDR PDFMarius CheroiuÎncă nu există evaluări
- CSA ProiectDocument28 paginiCSA ProiectlauraÎncă nu există evaluări
- Proiectarea Voiajului Unei Nave Cargou de 62000tdw Pe Ruta Taranto-Jebel AliDocument98 paginiProiectarea Voiajului Unei Nave Cargou de 62000tdw Pe Ruta Taranto-Jebel AliSergiu Valentin100% (1)
- Aparate de Respirat Sub ApaDocument157 paginiAparate de Respirat Sub ApascafandrigalatiÎncă nu există evaluări
- Manager de Proiect PDFDocument35 paginiManager de Proiect PDFlebadalebÎncă nu există evaluări
- FiltreDocument293 paginiFiltreAlin Andrei100% (1)
- Curs Complexe BunDocument39 paginiCurs Complexe Bunpelikanul2004Încă nu există evaluări
- Bobine Generalitati PDFDocument3 paginiBobine Generalitati PDFOfiter90Încă nu există evaluări
- Diode AreDocument6 paginiDiode AreMilea Ani SimonaÎncă nu există evaluări
- Diode Redresoare PDFDocument6 paginiDiode Redresoare PDFOfiter90100% (1)
- Amplificatoare Baza ComunaDocument2 paginiAmplificatoare Baza ComunaOfiter90Încă nu există evaluări