Exercitii i probleme pentru cursul 6
Reprezentarea sistemelor n spaiul strilor i prin
funcii de transfer
Exerciii rezolvate - Reprezentarea sistemelor n spaiul starilor i prin funcii
de transfer
A.6.1.1 Identificare reprezentrii sistemlului n spaiul strilor.
Urmtoarea secven Matlab:
>> A=[-1 5;0.2 -1];
>> B=[0.2 0;0 0.3];
>> C=[1 0;0 1];
>> D=[0 0;0 0];
>> sys=ss(A,B,C,D)
furnizeaz sistemul sys n reprezentare n spaiul strilor:
a =
x1 x2
x1 -1 5
x2 0.2 -1
b =
u1 u2
x1 0.2 0
x2 0 0.3
c =
x1 x2
y1 1 0
y2 0 1
d =
u1 u2
y1 0 0
y2 0 0
Continuous-time model.
Avnd sistemul deja definit, fie acesta sys, dac se dorete s se afle parametrii si matriceali, atunci se
utilizeaz funcia ssdata. Prin urmare, apelarea funciei ssdata:
>> [A,B,C,D]=ssdata(sys)
Conf. [Link]
�furnizeaz rezultatele:
A =
-1.0000 5.0000
0.2000 -1.0000
B =
Page | 2
0.2000 0
0 0.3000
C =
1 0
0 1
D =
0 0
0 0
Exerciiu cerin - Modelul matematic al unui motor de curent continuu.
Un sistemul de reglare automat trebuie s permit reglarea vitezei unui motor de curent continuu cu
magnei permaneni (notat prescurtat m.c.c), n toat plaja de valori posibile. Mrimile de interes ce
vor fi analizate prin simulare sunt viteza motorului si curentul prin motor.
Se consider un motor cu urmtoarele date:
Rezistena rotorului R = 10,
Inductivitatea rotorului L = 1mH,
Constanta de cuplu k = 0,05 Nm/A,
Momentul de inerie total (include i sarcina) J = 5*10-7 kgm2.
Se aplic o intrare treapt u 24V .
Se cere: 1. s se determine modelul matematic al unui motor de curent continuu cu magnei
permaneni. Se considera: F = 0 Nm/rad/s.
2. s se simuleze evoluia curentului prin motor la aplicarea unei trepte de tensiune u
(mrime de comand), la momentul de timp t = 0 s. Se va utiliza reprezentarea n
spaiul strilor;
3. s se simuleze rspunsul n vitez i curent al motorului de curent continuu la
aplicarea unui cuplu static de sarcin m s = 0.01Nm, dup ce viteza motorului s-a
stabilizat.
Indicaie: Obinerea modelului matematic.
Ecuaiile ce descriu funcionarea motorului sunt :
Conf. [Link]
� di
U Ri L dt k
m ki
d
J ki ms m f
dt Page | 3
unde: u este tensiunea de alimentare a motorului (mrimea de comand pentru sistem),
R, L rezistena i respectiv inductivitatea rotorului;
i este curentul care trece prin motor,
- viteza unghiular a rotorului,
m ki cuplul activ dezvoltat de motor,
m s - cuplul rezistent opus de ctre sarcin, constant (mrime de perturbaie),
m f - cuplul rezistent de frecri vscoase al motorului i al sarcinii ( m f F , unde F este
coeficientul de frecri vscoase),
J este momentul total de inerie al motorului i sarcinii
k - constant de tensiune electromotoare, respectiv de cuplu, ce depinde de construcia
mainii.
Mrimile de stare sunt curentul prin motor i i viteza acestuia. Ecuaiile sistemului se pot scrie
astfel:
di
L Ri k u
dt ,
J d Ki m F
s
dt
R k
1
d i L L i
0 u
sau matriceal:
dt k F L
0 1 ms
J J x
x
A
n cazul n care se dorete ca ieirea sistemului s fie turaia atunci matricele de scalare a
mrimilor de ieire, ce se folosesc pentru relaia ce descrie ieirea sistemului au forma: C 0 1 i
D=0.
Pentru a rspunde la punctul 3, unde sunt cerute ambele mrimi de stare, matricele de scalare a
1 0 0 0
mrimilor de ieire sunt: C , iar D .
0 1 0 0
Conf. [Link]
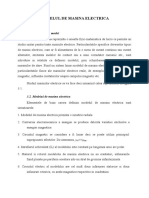
� Schema de
simulare util
pentru modelarea
motorul de curent
continuu
Page | 4
Configurrii interne
blocului State-space
Mrimi de vizualizat
Figura 6.1 Schema Simulink pe osciloscop
(necesar la punctul 3)
Pentru construirea schemei motorului de curent continuu se vor utiliza urmtoarele blocuri Simulink:
Step, Scope i Transfer Fcn, iar pentru setrile corespunztoare se poate reveni la
aplicaia demonstrativ 2;
Gain i Sum din biblioteca Math Operation;
i se vor nlocui blocurile In i OUT din schema prezentat n figura 6.2 cu blocurile Step i
respectiv Scope.
1
ms
1 1 omg
2 i
k
1 Figura 6.2.a
J.s
U L.s+R Sum3 omg
Sum2 k Schema
Transfer Fcn1 2
Transfer Fcn
Simulink pentru
i
k
omg motorul de
k
curent continuu,
detaliu
Se poate simplifica reprezentarea schemei din figura 6.2.a
prin conectarea acesteia sub forma de subsistem, n care se
pot identifica mrimile de intrare i ieire. Subsistemul
prezentat n figura 6.2.b, poate fi introdus n cadrul altor
reprezentri complexe ce utilizeaz motorul de c.c.
Figura 6.2.b Schema Simulink pentru motorul
de curent continuu, modelat ca subsistem
Conf. [Link]