0% au considerat acest document util (0 voturi)
64 vizualizări9 paginiCurs 7 PIMB
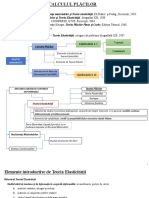
Documentul prezintă modele reologice utilizate pentru a explica comportamentul materialelor vâscoelastice. Sunt descrise principalele modele reologice (Kelvin și Maxwell) și elementele lor constitutive (arcuri și amortizoare). De asemenea, sunt prezentate ecuațiile reologice derivate pentru aceste modele pe baza legilor lui Hooke și Newton.
Încărcat de
AC STUDIO BUZAUDrepturi de autor
© © All Rights Reserved
Respectăm cu strictețe drepturile privind conținutul. Dacă suspectați că acesta este conținutul dumneavoastră, reclamați-l aici.
Formate disponibile
Descărcați ca PDF, TXT sau citiți online pe Scribd
0% au considerat acest document util (0 voturi)
64 vizualizări9 paginiCurs 7 PIMB
Documentul prezintă modele reologice utilizate pentru a explica comportamentul materialelor vâscoelastice. Sunt descrise principalele modele reologice (Kelvin și Maxwell) și elementele lor constitutive (arcuri și amortizoare). De asemenea, sunt prezentate ecuațiile reologice derivate pentru aceste modele pe baza legilor lui Hooke și Newton.
Încărcat de
AC STUDIO BUZAUDrepturi de autor
© © All Rights Reserved
Respectăm cu strictețe drepturile privind conținutul. Dacă suspectați că acesta este conținutul dumneavoastră, reclamați-l aici.
Formate disponibile
Descărcați ca PDF, TXT sau citiți online pe Scribd