S-ar putea să vă placă și
- Sistemul de Retribuire AmunciiDocument11 paginiSistemul de Retribuire AmunciiRomeoÎncă nu există evaluări
- Fisa PostuluiDocument8 paginiFisa PostuluicredannaÎncă nu există evaluări
- AA La CIM TelemuncaDocument7 paginiAA La CIM TelemuncaStefan AlinÎncă nu există evaluări
- Fisa PostuluiDocument3 paginiFisa PostuluiADRIANA COSTACHEÎncă nu există evaluări
- Referat Marketing AntreprenorialDocument13 paginiReferat Marketing AntreprenorialManuEllaÎncă nu există evaluări
- Robotica c1-5Document30 paginiRobotica c1-5Tataru CosminÎncă nu există evaluări
- Distincțiile Dintre Convenția Colectivă Și Contractul Colectiv de MuncăDocument6 paginiDistincțiile Dintre Convenția Colectivă Și Contractul Colectiv de Muncăion sniperÎncă nu există evaluări
- Carte P 3-105Document103 paginiCarte P 3-105adelussaÎncă nu există evaluări
- Negociere Si Comunicare CursDocument73 paginiNegociere Si Comunicare CurscralucaqÎncă nu există evaluări
- ObiectulDocument22 paginiObiectulRodicaPetracheÎncă nu există evaluări
- Managementul - Resurselor - Umane - CursDocument98 paginiManagementul - Resurselor - Umane - CursAlexandru Florin100% (1)
- ConcediereDocument12 paginiConcediereGeanina MitranÎncă nu există evaluări
- Suport de Curs Resurse UmaneDocument73 paginiSuport de Curs Resurse UmaneIoana Hreamata Manescu100% (1)
- Climatul Socio Psihologic Al ColectivuluiDocument3 paginiClimatul Socio Psihologic Al ColectivuluiGheorghina RaileanuÎncă nu există evaluări
- Economia Bazata Pe CunoastereDocument98 paginiEconomia Bazata Pe CunoasterePopescu IonutÎncă nu există evaluări
- Managementul Salarizării PersonaluluiDocument23 paginiManagementul Salarizării PersonaluluiMihaela Moisă100% (1)
- Comunicare Organizationala CursDocument163 paginiComunicare Organizationala CursAndreea ZahaÎncă nu există evaluări
- Fisa de Evaluare Personal Cu Functii de Executie1Document2 paginiFisa de Evaluare Personal Cu Functii de Executie1Iolanda StroeÎncă nu există evaluări
- Dezvoltarea Si Perfection Area PersonaluluiDocument12 paginiDezvoltarea Si Perfection Area PersonaluluiAnatol CurechiÎncă nu există evaluări
- Chestionar Analiza PostuluiDocument2 paginiChestionar Analiza PostuluiNicu BotnariÎncă nu există evaluări
- Tema Grup SoceramDocument4 paginiTema Grup SoceramyrysÎncă nu există evaluări
- Manualul AngajatuluiDocument15 paginiManualul AngajatuluiIonuț St100% (2)
- Legislatia MunciiDocument15 paginiLegislatia MunciiAndrada StanilaÎncă nu există evaluări
- Fisa PostuluiDocument3 paginiFisa PostuluiRaluca ElenaÎncă nu există evaluări
- Analiza Necesarului de PersonalDocument18 paginiAnaliza Necesarului de PersonalLumi Luminita50% (2)
- ACT ADIŢIONAL PTR Telemunca Model 2Document3 paginiACT ADIŢIONAL PTR Telemunca Model 2cristinapitulanÎncă nu există evaluări
- Contract Individual de Munca Radu MihaiDocument3 paginiContract Individual de Munca Radu MihaiLaura ManeaÎncă nu există evaluări
- Teza Cresterea ProductivitatiiDocument207 paginiTeza Cresterea ProductivitatiiVeronica Blanari100% (1)
- Proiect EVIDENTA TRENURILOR DE CÃLÃTORI INTR-O AGENTIE FEROVIARÃDocument52 paginiProiect EVIDENTA TRENURILOR DE CÃLÃTORI INTR-O AGENTIE FEROVIARÃPetcu MariusÎncă nu există evaluări
- Perioada de ProbaDocument1 paginăPerioada de Proba¿? Little Ama ¿?Încă nu există evaluări
- Legea Nr.625 Cu Privire La Protectiea MunciiDocument8 paginiLegea Nr.625 Cu Privire La Protectiea MunciiAnisoara Anisoara100% (1)
- Convertor Push PullDocument10 paginiConvertor Push PullelmannÎncă nu există evaluări
- Referat CCMDocument12 paginiReferat CCMStafie Alina CristinaÎncă nu există evaluări
- Regulamentul Intern CURSDocument2 paginiRegulamentul Intern CURSIulia CÎncă nu există evaluări
- Calcul IndemnizatieDocument1 paginăCalcul Indemnizatieancush_13Încă nu există evaluări
- Salarizarea in Sectorul RealDocument49 paginiSalarizarea in Sectorul RealKolea MtcÎncă nu există evaluări
- Motivarea PersonaluluiDocument8 paginiMotivarea PersonaluluiaNoMaR13Încă nu există evaluări
- Act AditionalDocument284 paginiAct AditionalBorcan GeorgetaÎncă nu există evaluări
- Raport Teambuilding YonderDocument4 paginiRaport Teambuilding YonderAzimut TeambuildingÎncă nu există evaluări
- Model de Raport Tehnic de EvaluareDocument9 paginiModel de Raport Tehnic de EvaluareUyukeeÎncă nu există evaluări
- Fisa de Post EconomistDocument5 paginiFisa de Post EconomistTraian BocanetÎncă nu există evaluări
- Contract Individual de Munca PrichiciDocument3 paginiContract Individual de Munca PrichiciDan DanyÎncă nu există evaluări
- Legislația Muncii La ZiDocument43 paginiLegislația Muncii La ZiMatei IrinaÎncă nu există evaluări
- Proiect Stagii 2017 AdientDocument9 paginiProiect Stagii 2017 Adientvladsandu94Încă nu există evaluări
- C25-Studiul MunciiDocument12 paginiC25-Studiul MunciiDanAlexandruJoitaÎncă nu există evaluări
- Dosar AngajareDocument35 paginiDosar AngajarePOEÎncă nu există evaluări
- Legea 273 2006 Forma Sintetica Pentru Data 2018-12-09Document32 paginiLegea 273 2006 Forma Sintetica Pentru Data 2018-12-09jidovulaurentiu81Încă nu există evaluări
- Referat Economie - Franciza Si LeasingulDocument8 paginiReferat Economie - Franciza Si LeasingulDarkripperÎncă nu există evaluări
- Cercul de CalitateDocument17 paginiCercul de CalitateAna MariaÎncă nu există evaluări
- TEHNICI ȘI STRATEGII MODERNE DE SPORIRE A PRODUCTIVITĂȚII MUNCII - Paduraru A. - FIEBDocument5 paginiTEHNICI ȘI STRATEGII MODERNE DE SPORIRE A PRODUCTIVITĂȚII MUNCII - Paduraru A. - FIEBAnastasiaÎncă nu există evaluări
- SRL DDocument20 paginiSRL DAlecsandra DanielaÎncă nu există evaluări
- Cerinte Proiect Practica (Managementul Resurselor Umane)Document3 paginiCerinte Proiect Practica (Managementul Resurselor Umane)Marina UrsachiÎncă nu există evaluări
- Acordarea Şi Divizarea Concediilor de OdihnăDocument4 paginiAcordarea Şi Divizarea Concediilor de OdihnăAileruaSÎncă nu există evaluări
- Referat Functia de Motivare in Managementul Resurselor UmaneDocument3 paginiReferat Functia de Motivare in Managementul Resurselor UmaneRaluca StoianÎncă nu există evaluări
- Obtinerea de Avantaje Competitive Prin InovareDocument4 paginiObtinerea de Avantaje Competitive Prin InovareAlina BodeaÎncă nu există evaluări
- Proiectarea Sistemelor de Conducere Cu AutomateDocument12 paginiProiectarea Sistemelor de Conducere Cu Automateandreeaoana45Încă nu există evaluări
- MicrocontrolereDocument23 paginiMicrocontrolerePetrovai Alexandru100% (1)
- MPP Torie2Document39 paginiMPP Torie2Levente BalazsÎncă nu există evaluări
- Programarea PLCDocument44 paginiProgramarea PLCVasi Vali100% (1)
- Cap7 Automate Programabile PLC SiemensDocument30 paginiCap7 Automate Programabile PLC SiemensNicola AndreiÎncă nu există evaluări
- 2023 Model Subiect Orientativ LICENTA-2023-OI-V1Document5 pagini2023 Model Subiect Orientativ LICENTA-2023-OI-V1Vlas BogdănÎncă nu există evaluări
- Testul de Cultură Generală Propus La Admiterea La Academia Națională de InformațiiDocument5 paginiTestul de Cultură Generală Propus La Admiterea La Academia Națională de InformațiiVlas BogdănÎncă nu există evaluări
- Eesc 2022 01212 00 00 As TraDocument7 paginiEesc 2022 01212 00 00 As TraVlas BogdănÎncă nu există evaluări
- Salon Cosmetica-Plan de AfaceriDocument13 paginiSalon Cosmetica-Plan de AfaceriVlas Bogdăn80% (10)
- CargoplanDocument24 paginiCargoplanVlas BogdănÎncă nu există evaluări
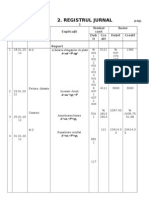
- Registru JurnalDocument2 paginiRegistru JurnalVlas BogdănÎncă nu există evaluări
- Registru JurnalDocument2 paginiRegistru JurnalVlas BogdănÎncă nu există evaluări