S-ar putea să vă placă și
- Teorie Mecanica - SintezaDocument19 paginiTeorie Mecanica - Sintezaradu catalinaÎncă nu există evaluări
- Mecanica 1 Probleme Rezolvate PDFDocument45 paginiMecanica 1 Probleme Rezolvate PDFSimi Nagy100% (1)
- Sinteza Curs Mecanica Anul IDocument13 paginiSinteza Curs Mecanica Anul IGheorgheCristescuÎncă nu există evaluări
- ### - Planul Si Dreapta in SpatiuDocument17 pagini### - Planul Si Dreapta in SpatiuMircea StefanoviciÎncă nu există evaluări
- Folosind Teorema Lui GreenDocument9 paginiFolosind Teorema Lui GreenCr CristinaÎncă nu există evaluări
- Functii OlomorfeDocument4 paginiFunctii OlomorfeIonut DincaÎncă nu există evaluări
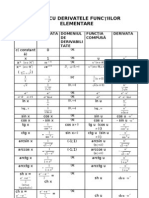
- Tabel Cu Derivatele Functiilor ElementareDocument1 paginăTabel Cu Derivatele Functiilor ElementareCosmin Alexandru NiculaeÎncă nu există evaluări
- Metode de Rezolvare A IntegralelorDocument14 paginiMetode de Rezolvare A IntegralelorCristina Donescu100% (1)
- Ecuatii Diferentiale PDFDocument124 paginiEcuatii Diferentiale PDFCrisÎncă nu există evaluări
- Mecanica Teoretica - Centre de Masa - PpsDocument48 paginiMecanica Teoretica - Centre de Masa - PpsMadalina MarinÎncă nu există evaluări
- Algebra-Modulul IV - Aplicatii Liniare, Valori Si Vectori Proprii PDFDocument40 paginiAlgebra-Modulul IV - Aplicatii Liniare, Valori Si Vectori Proprii PDFAlex PascuÎncă nu există evaluări
- Cinematica Punctului Material - Miscarea Rectilinie Si CurbilinieDocument8 paginiCinematica Punctului Material - Miscarea Rectilinie Si Curbilinieprimultim100% (7)
- Sem 7,8Document16 paginiSem 7,8cvacasa50Încă nu există evaluări
- Tabel DerivateDocument4 paginiTabel DerivateBîrsan Ovidiu-IoanÎncă nu există evaluări
- Tabla Unei OperaţiiDocument7 paginiTabla Unei OperaţiiMarcu AndreeaÎncă nu există evaluări
- Produsul Vectorial, Dublu Vectorial Si Produsul MixtDocument7 paginiProdusul Vectorial, Dublu Vectorial Si Produsul MixtMihaela ComanÎncă nu există evaluări
- Matematica Clasa - Xi Metodica Ecuatii Matriceale-1Document6 paginiMatematica Clasa - Xi Metodica Ecuatii Matriceale-1Carmina HatneanÎncă nu există evaluări
- Fizica Moleculara Si TermodinamicaDocument40 paginiFizica Moleculara Si Termodinamicacrissssy0% (3)
- Oscilatii MecaniceDocument18 paginiOscilatii Mecaniceprimultim100% (2)
- Criteriul Cu Epsilon - RezolvatDocument1 paginăCriteriul Cu Epsilon - RezolvatGeorgian CraciunÎncă nu există evaluări
- Metode Numerice Pentru Rezolvarea Ecuaţiilor Algebrice Neliniare Şi TranscendenteDocument17 paginiMetode Numerice Pentru Rezolvarea Ecuaţiilor Algebrice Neliniare Şi Transcendenteiulius8383% (6)
- Grupul Permutărilor Unei Mulţimi Grupuri SimetriceDocument31 paginiGrupul Permutărilor Unei Mulţimi Grupuri Simetricefr9495Încă nu există evaluări
- Algebra LiniaraDocument282 paginiAlgebra LiniaraAlina Florentina Tron0% (1)
- Grupuri FiniteDocument7 paginiGrupuri FiniteMarinela MihailescuÎncă nu există evaluări
- Analiza Matematica Culegere de ProblemeDocument84 paginiAnaliza Matematica Culegere de ProblemeRoxana AndreeaÎncă nu există evaluări
- Mecanica TeoreticaDocument42 paginiMecanica TeoreticaMike BrashÎncă nu există evaluări
- Proiect de Lectie Integrala DefinitaDocument5 paginiProiect de Lectie Integrala DefinitaCoti Catalin100% (2)
- Cap4 Functii ComplexeDocument42 paginiCap4 Functii ComplexeKta Cata100% (2)
- Ecuatii Diofantice1Document11 paginiEcuatii Diofantice1Dan Zainea100% (1)
- Culegere Matematica Clasa X BurteaDocument1 paginăCulegere Matematica Clasa X BurteaChirita MateiÎncă nu există evaluări
- Termodinamica Formule Grafice PDFDocument2 paginiTermodinamica Formule Grafice PDFDumitrescu AndreiÎncă nu există evaluări
- Backtracking-Probleme Si Grile Rezolvate in PascalDocument29 paginiBacktracking-Probleme Si Grile Rezolvate in PascalLumi Popescu100% (2)
- Algoritm Pentru Integrarea Funcţiilor TrigonometriceDocument1 paginăAlgoritm Pentru Integrarea Funcţiilor Trigonometricenoname1717100% (1)
- Intrebari MecanicaDocument23 paginiIntrebari MecanicaoptimusjoxÎncă nu există evaluări
- Compunerea A Doua Oscilatii ArmoniceDocument2 paginiCompunerea A Doua Oscilatii Armoniceabiss6Încă nu există evaluări
- Serii de NumereDocument18 paginiSerii de NumereleonardfÎncă nu există evaluări
- Ecuatii DiofanticeDocument9 paginiEcuatii DiofanticecrisdnÎncă nu există evaluări
- TABEL CU DERIVATELE FUNCŢIILOR ELEMENTARE-cls 11Document2 paginiTABEL CU DERIVATELE FUNCŢIILOR ELEMENTARE-cls 11Razvan Andrei Munteanu100% (4)
- Mecanica - Statica, Sorin Vlase PDFDocument275 paginiMecanica - Statica, Sorin Vlase PDFAlex Burcea100% (1)
- Formula Taylor Pentru Funcţii de Mai Multe VariabileDocument6 paginiFormula Taylor Pentru Funcţii de Mai Multe VariabileClaudiu MihaiÎncă nu există evaluări
- 1202 Metode de Calcul Al PrimitivelorDocument20 pagini1202 Metode de Calcul Al Primitivelorbrada123Încă nu există evaluări
- Probleme CinematicaDocument54 paginiProbleme CinematicaMadalinÎncă nu există evaluări
- Probleme de CinematicaDocument19 paginiProbleme de CinematicaDoru HodisanÎncă nu există evaluări
- Tema 7Document2 paginiTema 7MmmÎncă nu există evaluări
- Laboratorul 6 Mecanica Topala MihaiDocument12 paginiLaboratorul 6 Mecanica Topala MihaiMazurchevici RodicaÎncă nu există evaluări
- Lucrare de Laborator NR 3Document12 paginiLucrare de Laborator NR 3Ion AxenteÎncă nu există evaluări
- Problem Rezolvate Curbe 3dDocument12 paginiProblem Rezolvate Curbe 3drazvan_raz_1Încă nu există evaluări
- Sem.5.Int - Curbilinii (Grosu G.)Document39 paginiSem.5.Int - Curbilinii (Grosu G.)Mircea StefanoviciÎncă nu există evaluări
- Fizica ExDocument87 paginiFizica Exalexandru_o9Încă nu există evaluări
- Întrebări Şi Răspunsuri La Geometrie DiferenţialăDocument14 paginiÎntrebări Şi Răspunsuri La Geometrie DiferenţialăAndreiMaxim100% (7)
- Wa0000 PDFDocument4 paginiWa0000 PDFTusca AndreiÎncă nu există evaluări
- Geometrie Analitică PlanăDocument5 paginiGeometrie Analitică Planăirina67% (3)
- Curs OscilatiimecaniceDocument21 paginiCurs OscilatiimecaniceLuminitaAnghelÎncă nu există evaluări
- Laboratorul 8 - Modelare Si SimulareDocument6 paginiLaboratorul 8 - Modelare Si SimulareTudor MunteanuÎncă nu există evaluări
- GDDocument5 paginiGDMaxim BoretsÎncă nu există evaluări
- Trigonometrie TeorieDocument2 paginiTrigonometrie TeorieJune Alin100% (3)
- ImagetotextDocument2 paginiImagetotextVadim CiubotaruÎncă nu există evaluări
- Cheia Succesului in Cariera - AutodisciplinaDocument22 paginiCheia Succesului in Cariera - AutodisciplinaVadim CiubotaruÎncă nu există evaluări
- Tehnocopia2 (21) 2019 038 052Document15 paginiTehnocopia2 (21) 2019 038 052Vadim CiubotaruÎncă nu există evaluări
- Habasescu Angela Parteneriat EducDocument4 paginiHabasescu Angela Parteneriat EducVadim CiubotaruÎncă nu există evaluări
- Cybercrime Report SummaryDocument2 paginiCybercrime Report SummaryVadim CiubotaruÎncă nu există evaluări
- GAMADocument2 paginiGAMABeround BeroundÎncă nu există evaluări
- SRL Garile Auto ModerneDocument1 paginăSRL Garile Auto ModerneVadim CiubotaruÎncă nu există evaluări
- STUDIU - NR - 1 - 2012 Situatie Socio-EconomicaDocument54 paginiSTUDIU - NR - 1 - 2012 Situatie Socio-EconomicaVadim CiubotaruÎncă nu există evaluări
- Tehnici Și Metode SteganograficeDocument8 paginiTehnici Și Metode SteganograficeVadim CiubotaruÎncă nu există evaluări
- Lab 4Document4 paginiLab 4Vadim CiubotaruÎncă nu există evaluări
- Riscurile Economiei NaționaleDocument11 paginiRiscurile Economiei NaționaleVadim CiubotaruÎncă nu există evaluări
- Referat AMIDDocument9 paginiReferat AMIDVadim CiubotaruÎncă nu există evaluări
- Examen Data MiningDocument3 paginiExamen Data MiningVadim CiubotaruÎncă nu există evaluări
- Lab 2Document5 paginiLab 2Vadim CiubotaruÎncă nu există evaluări
- RezumatDocument2 paginiRezumatTeodor CeocanÎncă nu există evaluări
- Lab 4Document5 paginiLab 4Vadim CiubotaruÎncă nu există evaluări
- Psi 1Document14 paginiPsi 1Vadim CiubotaruÎncă nu există evaluări
- Mihai Eminescu - Versuri Din Manuscrise PDFDocument290 paginiMihai Eminescu - Versuri Din Manuscrise PDFBelko IosifÎncă nu există evaluări
- Lab 4nDocument2 paginiLab 4nVadim CiubotaruÎncă nu există evaluări
- Lucrare de Laborator 2Document4 paginiLucrare de Laborator 2Vadim CiubotaruÎncă nu există evaluări
- Revista Schimbari Climatice PDFDocument32 paginiRevista Schimbari Climatice PDFmaryÎncă nu există evaluări
- Fisa FizicaDocument5 paginiFisa FizicaVadim CiubotaruÎncă nu există evaluări
- Sistemul Solar: RezumatDocument27 paginiSistemul Solar: RezumatSilviuAngelinÎncă nu există evaluări
- RezumatDocument2 paginiRezumatTeodor CeocanÎncă nu există evaluări
- Laboratorul1 ASRDocument7 paginiLaboratorul1 ASRSergiu MotricalaÎncă nu există evaluări
- Lab Nr. 4.1+2newDocument3 paginiLab Nr. 4.1+2newVadim CiubotaruÎncă nu există evaluări
- Laborator Num.3Document4 paginiLaborator Num.3Vadim CiubotaruÎncă nu există evaluări
- Articol GNS3Document4 paginiArticol GNS3Vadim CiubotaruÎncă nu există evaluări
- Laboratorul1 ASRDocument7 paginiLaboratorul1 ASRSergiu MotricalaÎncă nu există evaluări
- DefinițiDocument2 paginiDefinițiVadim CiubotaruÎncă nu există evaluări