S-ar putea să vă placă și
- L2 Adaptive CMMP EstimationDocument9 paginiL2 Adaptive CMMP EstimationTudor MidriganÎncă nu există evaluări
- Circuite Electrice in Regim SinusoidalDocument14 paginiCircuite Electrice in Regim Sinusoidaldoina_gaby9380Încă nu există evaluări
- Regim NesinusoidalDocument5 paginiRegim NesinusoidalMeterna AdrianÎncă nu există evaluări
- Cap-06 (Transformari Liniare)Document33 paginiCap-06 (Transformari Liniare)Adrian Pop100% (2)
- AGAD Curs2Document19 paginiAGAD Curs2B. IonutÎncă nu există evaluări
- Curs 4-ImedDocument110 paginiCurs 4-Imedknasto05Încă nu există evaluări
- Curs 2 MateDocument6 paginiCurs 2 MateAdnana Alexandra PavelÎncă nu există evaluări
- Mate-CURS 4-Transformări LiniareDocument11 paginiMate-CURS 4-Transformări LiniareIngrid Nicoleta SterpuÎncă nu există evaluări
- 2.transformari Liniare PDFDocument16 pagini2.transformari Liniare PDFmihnea09Încă nu există evaluări
- Ec Dif Liniare de Ord NDocument14 paginiEc Dif Liniare de Ord Nbianca lascaracheÎncă nu există evaluări
- Curs 3 - Transformari LiniareDocument9 paginiCurs 3 - Transformari LiniareVali[; x]Încă nu există evaluări
- Curs6 7Document9 paginiCurs6 7Anca PufleaÎncă nu există evaluări
- CURSUL 5, ALGAD Transformări LiniareDocument8 paginiCURSUL 5, ALGAD Transformări LiniareVisoiu Marius CristianÎncă nu există evaluări
- Tema 1Document4 paginiTema 1Cristian MateiÎncă nu există evaluări
- 06 - U.i.2.-Transf - Lin.-Modululi Alg - Lin.Document11 pagini06 - U.i.2.-Transf - Lin.-Modululi Alg - Lin.boglarka bogyoÎncă nu există evaluări
- Geometrie Licenta Transformari AfineDocument23 paginiGeometrie Licenta Transformari AfineClaudia Alina IovanÎncă nu există evaluări
- PedagogieDocument34 paginiPedagogieAna ŢîruÎncă nu există evaluări
- Y y y y Y: 1. Transformata Wavelet (Undină) C R R C RDocument8 paginiY y y y Y: 1. Transformata Wavelet (Undină) C R R C RBogdan AlexandruÎncă nu există evaluări
- Capitolul 4. Aplicatii LiniareDocument14 paginiCapitolul 4. Aplicatii LiniareefreÎncă nu există evaluări
- Transf Liniare 1-Nucleu+imagDocument8 paginiTransf Liniare 1-Nucleu+imagVep SolutionsÎncă nu există evaluări
- Unde ElasticeDocument16 paginiUnde ElasticeIonuț CarpÎncă nu există evaluări
- REFLEXIIDocument12 paginiREFLEXIIC-jay ExÎncă nu există evaluări
- Curs05-Endomorfisme DiagonalizabileDocument15 paginiCurs05-Endomorfisme DiagonalizabileStan AnaÎncă nu există evaluări
- CursDG CAP 3 Ecuatii de Conservare Part 5 Conserv Primitiv 2020Document29 paginiCursDG CAP 3 Ecuatii de Conservare Part 5 Conserv Primitiv 2020adam tcacencoÎncă nu există evaluări
- Dragos Dragan - TSADocument24 paginiDragos Dragan - TSADragos DraganÎncă nu există evaluări
- cnc6 PDFDocument11 paginicnc6 PDFEvrika EducationÎncă nu există evaluări
- Algebra Si Geometrie Pag 16Document146 paginiAlgebra Si Geometrie Pag 16Mr_LogaÎncă nu există evaluări
- Mecanica - Tehnol.Document3 paginiMecanica - Tehnol.loredanaÎncă nu există evaluări
- Modelare Matematica in Elasticitate PDFDocument144 paginiModelare Matematica in Elasticitate PDFChaNceÎncă nu există evaluări
- Mecanica 1 2Document38 paginiMecanica 1 2Ionuț CarpÎncă nu există evaluări
- C 4 Egcd 2 Ps 20152016Document20 paginiC 4 Egcd 2 Ps 20152016mateiuliÎncă nu există evaluări
- Curbe În Spațiu Si Reprezentările Lor-TeoriaDocument8 paginiCurbe În Spațiu Si Reprezentările Lor-TeoriaPetrica MarinÎncă nu există evaluări
- Aplicatii LiniareDocument13 paginiAplicatii LiniareEmilia TomaÎncă nu există evaluări
- Lectie (Reprezentarea Semnalelor de Bandă Îngustă Cu Ajutorul Anvelopei Complexe)Document30 paginiLectie (Reprezentarea Semnalelor de Bandă Îngustă Cu Ajutorul Anvelopei Complexe)Ion Daniel-EduardÎncă nu există evaluări
- Curs 1 26-02-21Document9 paginiCurs 1 26-02-21Dorin OprisanÎncă nu există evaluări
- Regimul Periodic Nesinusoidal (Deformant)Document17 paginiRegimul Periodic Nesinusoidal (Deformant)emilfrancuÎncă nu există evaluări
- Curs Termodinamica ChimicaDocument163 paginiCurs Termodinamica ChimicaSilvia UngureanuÎncă nu există evaluări
- Curs Fizica FebruarieDocument41 paginiCurs Fizica FebruarieAndra ŢăroiÎncă nu există evaluări
- C10 PNSDocument5 paginiC10 PNSMihaela IvanÎncă nu există evaluări
- CFIB Sem1 21-22 C03Document18 paginiCFIB Sem1 21-22 C03Sara Elena ManolacheÎncă nu există evaluări
- Functia Exp ComplexDocument4 paginiFunctia Exp ComplexAmaicei LarisaÎncă nu există evaluări
- LP11 - Generator Semnal Dreptunghiular Cu AODocument7 paginiLP11 - Generator Semnal Dreptunghiular Cu AOHenrickÎncă nu există evaluări
- Operatori LiniariDocument5 paginiOperatori LiniariAdrian Gabriel PatrascuÎncă nu există evaluări
- 1109 Polinoame TaylorDocument9 pagini1109 Polinoame TaylorCrina LazarÎncă nu există evaluări
- Integrale Triple, Aplicatii PDFDocument8 paginiIntegrale Triple, Aplicatii PDFCristina BerlinschiÎncă nu există evaluări
- Curs 3 - Serii de TimpDocument18 paginiCurs 3 - Serii de TimpAlbeanu Romina PaulaÎncă nu există evaluări
- Sem1 ExDocument12 paginiSem1 ExIonIonescuÎncă nu există evaluări
- Sem 2 ERORI r04Document19 paginiSem 2 ERORI r04Preda CristiÎncă nu există evaluări
- F2 BucurestiDocument3 paginiF2 BucurestibiancareanysÎncă nu există evaluări
- Efectele Peltier, Seebeck, Thompson (Romana)Document14 paginiEfectele Peltier, Seebeck, Thompson (Romana)amen100% (2)
- 4.aplicatii Liniare E ProvizDocument16 pagini4.aplicatii Liniare E ProvizAlexPleşÎncă nu există evaluări
- Alc 3Document10 paginiAlc 3Madalin BodeaÎncă nu există evaluări
- Transformarea Politropa Termodinamica Clasa 10Document4 paginiTransformarea Politropa Termodinamica Clasa 10Dragu AndreiÎncă nu există evaluări
- Curbe 1Document6 paginiCurbe 1bogdan popoviciÎncă nu există evaluări
- UlarucondescuDocument6 paginiUlarucondescuContoloru CostinÎncă nu există evaluări
- JhgjihDocument158 paginiJhgjihDaniela ChepteneÎncă nu există evaluări
- cnc3 PDFDocument9 paginicnc3 PDFCristina TomițăÎncă nu există evaluări
- Alc 3Document10 paginiAlc 3Catalin Iulian CoceaÎncă nu există evaluări
- S2Document5 paginiS2S AdrianÎncă nu există evaluări
- S4Document2 paginiS4S AdrianÎncă nu există evaluări
- Curs Nr. 6 +7 Cap .3 Forme Biliniare. Forme Pătratice Forme BiliniareDocument12 paginiCurs Nr. 6 +7 Cap .3 Forme Biliniare. Forme Pătratice Forme BiliniareS AdrianÎncă nu există evaluări
- 7 Vectori Şi Valori PropriiDocument10 pagini7 Vectori Şi Valori PropriiS AdrianÎncă nu există evaluări
- S1Document3 paginiS1S AdrianÎncă nu există evaluări
- Curs Nr. 2: Definiţia 4.1Document8 paginiCurs Nr. 2: Definiţia 4.1S AdrianÎncă nu există evaluări
- Cursul Nr. 3: Definiţia 7.1. Fie V Un C-Spaţiu Vectorial. Aplicaţia (,) : V × V C Ce RespectăDocument12 paginiCursul Nr. 3: Definiţia 7.1. Fie V Un C-Spaţiu Vectorial. Aplicaţia (,) : V × V C Ce RespectăS AdrianÎncă nu există evaluări
- Telefoane UtileDocument6 paginiTelefoane UtileS AdrianÎncă nu există evaluări
- Valentin Diaconu - Matematica, Prietena Mea. Fise de Lucru - Clasa 3Document12 paginiValentin Diaconu - Matematica, Prietena Mea. Fise de Lucru - Clasa 3Stela Andreica75% (4)
- Capitolul I Spaţii Vectoriale 1 Definiţia Spaţiului VectorialDocument8 paginiCapitolul I Spaţii Vectoriale 1 Definiţia Spaţiului VectorialS AdrianÎncă nu există evaluări
- I C11-Semestrul 2Document1 paginăI C11-Semestrul 2S AdrianÎncă nu există evaluări
- Valentin Diaconu - Matematica, Prietena Mea. Fise de Lucru - Clasa 3Document12 paginiValentin Diaconu - Matematica, Prietena Mea. Fise de Lucru - Clasa 3Stela Andreica75% (4)
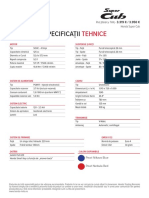
- Super CubDocument1 paginăSuper CubS AdrianÎncă nu există evaluări
- Valentin Diaconu - Matematica, Prietena Mea. Fise de Lucru - Clasa 3Document12 paginiValentin Diaconu - Matematica, Prietena Mea. Fise de Lucru - Clasa 3Stela Andreica75% (4)