0% au considerat acest document util (0 voturi)
73 vizualizări14 paginiMEF - Prezentarea 4
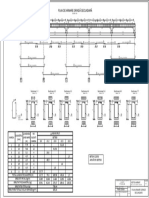
Documentul prezintă elementul finit de bară dublu articulată, care are numai rigiditate axială. Sunt descrise caracteristicile elementului, modul de modelare în programul SAP2000 și determinarea matricei de rigiditate în sistemul de axe local al elementului.
Încărcat de
radu2205Drepturi de autor
© © All Rights Reserved
Respectăm cu strictețe drepturile privind conținutul. Dacă suspectați că acesta este conținutul dumneavoastră, reclamați-l aici.
Formate disponibile
Descărcați ca PDF, TXT sau citiți online pe Scribd
0% au considerat acest document util (0 voturi)
73 vizualizări14 paginiMEF - Prezentarea 4
Documentul prezintă elementul finit de bară dublu articulată, care are numai rigiditate axială. Sunt descrise caracteristicile elementului, modul de modelare în programul SAP2000 și determinarea matricei de rigiditate în sistemul de axe local al elementului.
Încărcat de
radu2205Drepturi de autor
© © All Rights Reserved
Respectăm cu strictețe drepturile privind conținutul. Dacă suspectați că acesta este conținutul dumneavoastră, reclamați-l aici.
Formate disponibile
Descărcați ca PDF, TXT sau citiți online pe Scribd