S-ar putea să vă placă și
- Lab 22Document5 paginiLab 22GheorgheGritcanÎncă nu există evaluări
- Probleme Etcti FizicaDocument6 paginiProbleme Etcti FizicaAndrei VoineaÎncă nu există evaluări
- Manual Mate 4Document2 paginiManual Mate 4Ionescu RazvanÎncă nu există evaluări
- L1 Determinarea Acceleratiei Gravitationale Prin Metoda Pendulului Matematic PDFDocument5 paginiL1 Determinarea Acceleratiei Gravitationale Prin Metoda Pendulului Matematic PDFSimona TeglasÎncă nu există evaluări
- Laborator 4Document3 paginiLaborator 4Vasy RoibanÎncă nu există evaluări
- 0 SUPORT Teoretic LABORATOARE VibratiiDocument13 pagini0 SUPORT Teoretic LABORATOARE VibratiiMihai-Ovidiu PopaÎncă nu există evaluări
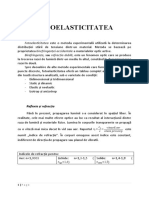
- FOTOELASTICITATEADocument10 paginiFOTOELASTICITATEAAxl AllexÎncă nu există evaluări
- Aplicatii 3Document46 paginiAplicatii 3emilian alexeÎncă nu există evaluări
- Fenomene Optice - M. M. Popovici (1999)Document392 paginiFenomene Optice - M. M. Popovici (1999)Oleg GorincioiÎncă nu există evaluări
- Exemple de Aplicatii TeoreticeDocument26 paginiExemple de Aplicatii TeoreticeGeorgian Zahiu100% (3)
- Principiul Lui Fermat Aplicat in Optica Geometrica 1669Document5 paginiPrincipiul Lui Fermat Aplicat in Optica Geometrica 1669dumitrascu_lucian100% (3)
- Teste Ehd TribologieDocument1 paginăTeste Ehd TribologieAndrei PopescuÎncă nu există evaluări
- Dinamica Sistemelor - Seminar8Document40 paginiDinamica Sistemelor - Seminar8Berbec Ionut LaurentiuÎncă nu există evaluări
- Lucrare de Laborator Teorema Variației Energiei CineticeDocument6 paginiLucrare de Laborator Teorema Variației Energiei CineticeFiodor Grecu100% (2)
- Fizica Corpului SolidDocument12 paginiFizica Corpului Solidrocsana87Încă nu există evaluări
- Laborator 1Document2 paginiLaborator 1Emil PoenaruÎncă nu există evaluări
- DINAMICA Miscarii Relative Curs 4Document39 paginiDINAMICA Miscarii Relative Curs 4Licente Si Disertatii ComenziÎncă nu există evaluări
- Lucrare Practica-FizicaDocument3 paginiLucrare Practica-FizicaGabriel PirlogÎncă nu există evaluări
- РГР №2Document8 paginiРГР №2Ivan RadovÎncă nu există evaluări
- Determinarea Constantei Elastice A Unui ResortDocument5 paginiDeterminarea Constantei Elastice A Unui ResortAnonymous awV2SGÎncă nu există evaluări
- Pendulul de TorsiuneDocument2 paginiPendulul de TorsiunerobertÎncă nu există evaluări
- Scopul Lucrării: Studiul Radiaţiilor Beta Provenind de La Sursele RadioactiveDocument3 paginiScopul Lucrării: Studiul Radiaţiilor Beta Provenind de La Sursele RadioactiveCristi 04Încă nu există evaluări
- Deformarea Elastica A Unui ResortDocument4 paginiDeformarea Elastica A Unui ResortAndreea DeeaÎncă nu există evaluări
- Indrumar Fizica 1-Sem 2Document39 paginiIndrumar Fizica 1-Sem 2IonutIancuÎncă nu există evaluări
- CP1 Introducere: Introducere. Cinematica Punctului MaterialDocument13 paginiCP1 Introducere: Introducere. Cinematica Punctului MaterialAndreiÎncă nu există evaluări
- Seminar 3.2 PDFDocument7 paginiSeminar 3.2 PDFLoredana GheorgheÎncă nu există evaluări
- 1 45Document36 pagini1 45PopusoiDaniel50% (2)
- Lucrarea 3C, PanainteDocument5 paginiLucrarea 3C, PanainteCatalin PoiataÎncă nu există evaluări
- Probleme Analiza Dimensionala PDFDocument9 paginiProbleme Analiza Dimensionala PDFDenisa ZahariaÎncă nu există evaluări
- MEMS Laboratorul 1Document15 paginiMEMS Laboratorul 1Valentin Stochita100% (1)
- Mecanica 2 - Curs 3Document10 paginiMecanica 2 - Curs 3andrei ionutÎncă nu există evaluări
- Lucrare de Laborator NR4 - 1618551606Document3 paginiLucrare de Laborator NR4 - 1618551606Iulian AlexeevÎncă nu există evaluări
- ESN CURS 6 CoorectatDocument26 paginiESN CURS 6 CoorectatAlex CiorogarÎncă nu există evaluări
- 10 ANALIZA OCHIURILOR - Unitatea de Invatare 10Document7 pagini10 ANALIZA OCHIURILOR - Unitatea de Invatare 10ionutg1997Încă nu există evaluări
- Fizica - Cursul 3Document10 paginiFizica - Cursul 3Robert ȘtefanÎncă nu există evaluări
- RangDocument10 paginiRangBogdan MohoraÎncă nu există evaluări
- Tehnica Analizei CircuitelorDocument32 paginiTehnica Analizei CircuitelorDaniel CrutanÎncă nu există evaluări
- Probleme Rezolvate 1Document2 paginiProbleme Rezolvate 1Nicholas Owens0% (1)
- Modele EmpiriceDocument32 paginiModele EmpiriceEcaterina MoruzÎncă nu există evaluări
- Actionari Electrice II LaboratorDocument55 paginiActionari Electrice II LaboratorIulian100% (1)
- Pendulul Matematic PDFDocument4 paginiPendulul Matematic PDFBogdi CerbuÎncă nu există evaluări
- III.1. Mişcarea de Vibraţie A MoleculelorDocument22 paginiIII.1. Mişcarea de Vibraţie A MoleculelorTfik MaÎncă nu există evaluări
- L4 Pendule CuplateDocument9 paginiL4 Pendule CuplateBîrsan Vasile GeorgianÎncă nu există evaluări
- Var 84Document7 paginiVar 84Victor CrowÎncă nu există evaluări
- III - Campul MagneticDocument69 paginiIII - Campul MagneticPaulina VoicuÎncă nu există evaluări
- Laborator 6Document2 paginiLaborator 6Vasy RoibanÎncă nu există evaluări
- Fundatie Izolata PanouDocument17 paginiFundatie Izolata PanouOvirelance -Marius PascariuÎncă nu există evaluări
- Lab 1Document10 paginiLab 1ionut manoiuÎncă nu există evaluări
- Determinarea Acceleraţiei GravitaţionaleDocument1 paginăDeterminarea Acceleraţiei GravitaţionaleLeonard ChiriţăÎncă nu există evaluări
- Beton ArmatDocument54 paginiBeton ArmatAlex B.100% (1)
- Dispersia LuminiiDocument7 paginiDispersia LuminiiBogdan SerbanÎncă nu există evaluări
- 10 Compararea L Cu EcDocument3 pagini10 Compararea L Cu EcCristina SoloveiÎncă nu există evaluări
- Lucrare Laborator Pendulul FizicDocument4 paginiLucrare Laborator Pendulul FizicEusebiu ManÎncă nu există evaluări
- Proiect Robotica Cama Matei PanaDocument10 paginiProiect Robotica Cama Matei PanaDumitru SebastianÎncă nu există evaluări
- 1-Studiul Oscilatiilor Amortizate Pe Model ElectricDocument7 pagini1-Studiul Oscilatiilor Amortizate Pe Model ElectricEugen SchiopuÎncă nu există evaluări
- Pendulul MatematicDocument5 paginiPendulul MatematicEmanuela PopaÎncă nu există evaluări
- Retetele BuniciiDocument52 paginiRetetele Buniciinico_b767492100% (41)
- 8.determinarea Constantei Planck Din Studiul Efectului FotoelectricDocument6 pagini8.determinarea Constantei Planck Din Studiul Efectului FotoelectricIonela OdăianuÎncă nu există evaluări
- Retete Culinare ExoticeDocument83 paginiRetete Culinare Exoticemadalina2008100% (9)
- Caiet PrajituriDocument51 paginiCaiet Prajiturinico_b76749297% (39)
- 44 de Retete Cu DragosteDocument47 pagini44 de Retete Cu DragostevaleriamihÎncă nu există evaluări
- Excel TrainingDocument221 paginiExcel TrainingananiculaeÎncă nu există evaluări
- Curs10pm UDocument3 paginiCurs10pm ULicente Si Disertatii ComenziÎncă nu există evaluări
- Curs10pm UDocument3 paginiCurs10pm ULicente Si Disertatii ComenziÎncă nu există evaluări
- Tehnologii Bazate Pe Efectul LaserDocument6 paginiTehnologii Bazate Pe Efectul LaserLicente Si Disertatii ComenziÎncă nu există evaluări
- Determinarea Sarcinii Specifice A Electronului Din LEGEA 3-2 A Diodei PDFDocument4 paginiDeterminarea Sarcinii Specifice A Electronului Din LEGEA 3-2 A Diodei PDFLicente Si Disertatii ComenziÎncă nu există evaluări
- Curs SEM6Document63 paginiCurs SEM6costel_80Încă nu există evaluări
- Curs 5D - M - 2013Document50 paginiCurs 5D - M - 2013Licente Si Disertatii ComenziÎncă nu există evaluări
- Tehnologii Bazate Pe Efectul LaserDocument21 paginiTehnologii Bazate Pe Efectul LaserPirvu SorinÎncă nu există evaluări
- DINAMICA Sistemelor de Puncte Solid Rigid Curs 6Document76 paginiDINAMICA Sistemelor de Puncte Solid Rigid Curs 6Licente Si Disertatii ComenziÎncă nu există evaluări
- DINAMICA Miscarii Relative Curs 4Document39 paginiDINAMICA Miscarii Relative Curs 4Licente Si Disertatii ComenziÎncă nu există evaluări
- Dinamica Sistemelor - Seminar8Document40 paginiDinamica Sistemelor - Seminar8Berbec Ionut LaurentiuÎncă nu există evaluări
- Momente de Inertie - Curs5Document43 paginiMomente de Inertie - Curs5Licente Si Disertatii ComenziÎncă nu există evaluări
- Momente de Inertie - Curs5Document43 paginiMomente de Inertie - Curs5Licente Si Disertatii ComenziÎncă nu există evaluări
- Momente de Inertie - Curs5Document43 paginiMomente de Inertie - Curs5Licente Si Disertatii ComenziÎncă nu există evaluări
- C2 MuDocument4 paginiC2 Mudrana1Încă nu există evaluări
- Determinarea Constantei Lui Planck Prin Studiul Efectului Fotoelectric ExternDocument3 paginiDeterminarea Constantei Lui Planck Prin Studiul Efectului Fotoelectric ExternLicente Si Disertatii ComenziÎncă nu există evaluări
- C1 Mu PDFDocument3 paginiC1 Mu PDFBogdan CraciunÎncă nu există evaluări
- Determinarea Sarcinii Specifice A ElectronuluiDocument2 paginiDeterminarea Sarcinii Specifice A ElectronuluiLicente Si Disertatii ComenziÎncă nu există evaluări
- William Janes Teoria PragmatistaDocument11 paginiWilliam Janes Teoria PragmatistaLicente Si Disertatii ComenziÎncă nu există evaluări
- C1 Mu PDFDocument3 paginiC1 Mu PDFBogdan CraciunÎncă nu există evaluări
- 8.determinarea Constantei Planck Din Studiul Efectului FotoelectricDocument6 pagini8.determinarea Constantei Planck Din Studiul Efectului FotoelectricIonela OdăianuÎncă nu există evaluări
- Tehnologii Bazate Pe Efectul LaserDocument21 paginiTehnologii Bazate Pe Efectul LaserPirvu SorinÎncă nu există evaluări
- Determinarea Sarcinii Specifice A ElectronuluiDocument2 paginiDeterminarea Sarcinii Specifice A ElectronuluiLicente Si Disertatii ComenziÎncă nu există evaluări