S-ar putea să vă placă și
- Masurari Electrice Auxiliar Curricular1Document33 paginiMasurari Electrice Auxiliar Curricular1bratiloveanu ionÎncă nu există evaluări
- Calcul Rulmenti - LS - 3Document11 paginiCalcul Rulmenti - LS - 3Bogdan CarloÎncă nu există evaluări
- WWW - Referate.ro-Componente Electronice Active Si Pasive bcb5bDocument9 paginiWWW - Referate.ro-Componente Electronice Active Si Pasive bcb5bRadu DelaAfumatiÎncă nu există evaluări
- Reconditionarea Pieselor UzateDocument11 paginiReconditionarea Pieselor Uzatecristitoader90Încă nu există evaluări
- Controlul Imbinarilor SudateDocument12 paginiControlul Imbinarilor SudateMihail Sirbu0% (1)
- HonuireDocument13 paginiHonuiredbzcri100% (1)
- Curs 11Document7 paginiCurs 11Daniel TeofanÎncă nu există evaluări
- TaiereaDocument5 paginiTaiereaBabadac TudorÎncă nu există evaluări
- EcmDocument4 paginiEcmmuschetaru1991Încă nu există evaluări
- CAP 10 StrunjireaDocument60 paginiCAP 10 StrunjireaCristinaÎncă nu există evaluări
- Sudarea Cu Fascicul LaserDocument19 paginiSudarea Cu Fascicul LaserMihaela CreițariÎncă nu există evaluări
- Elaborarea Aluminiului TMDocument17 paginiElaborarea Aluminiului TMMaxim Ionela100% (1)
- Prelucrarea Prin Eroziune Electrica DINDocument20 paginiPrelucrarea Prin Eroziune Electrica DINAnne MarieÎncă nu există evaluări
- Curs NR 2 - 12 - 10 - 2020Document65 paginiCurs NR 2 - 12 - 10 - 2020Corina PredaÎncă nu există evaluări
- Transmisii Prin CureleDocument17 paginiTransmisii Prin CureleCata CrisÎncă nu există evaluări
- Selectia Materialelor Pentru Arbore CotitDocument15 paginiSelectia Materialelor Pentru Arbore CotitCalin MihaitaÎncă nu există evaluări
- Asamblari Prin Sudare ElectricaDocument7 paginiAsamblari Prin Sudare ElectricaPresedinte1990Încă nu există evaluări
- Deformare VolumicaDocument14 paginiDeformare Volumicaavramcosmindorina100% (1)
- L4 VibronetezireDocument6 paginiL4 VibronetezireAlexandru NistorÎncă nu există evaluări
- Istoria Masinilor Unelte Si Prelucrarilor MecaniceDocument5 paginiIstoria Masinilor Unelte Si Prelucrarilor MecaniceDavid PatrickÎncă nu există evaluări
- Electroeroziun Cu Fir Si Taiere Cu LaserDocument18 paginiElectroeroziun Cu Fir Si Taiere Cu LaserBettina HajnalkaÎncă nu există evaluări
- CarburareDocument6 paginiCarburareCristian NituÎncă nu există evaluări
- Proiect Proiectarea ProduselorDocument32 paginiProiect Proiectarea ProduselorCrafty SeedÎncă nu există evaluări
- Parametrii Constructuv-Functionali Specifici Ai Robotilor IndustrialiDocument12 paginiParametrii Constructuv-Functionali Specifici Ai Robotilor Industrialibboby14Încă nu există evaluări
- ActuatoriDocument6 paginiActuatoriMiorita_13Încă nu există evaluări
- Lectii SolidWorks 1a TablaDocument31 paginiLectii SolidWorks 1a Tablavintiloius100% (1)
- Curs 8Document6 paginiCurs 8Daniel TeofanÎncă nu există evaluări
- Asamblarea Prin Sudare in Industria AutoDocument10 paginiAsamblarea Prin Sudare in Industria AutoCristiÎncă nu există evaluări
- Metode de Determinare A Randamentului La Angrenajele Cu Axe MobileDocument29 paginiMetode de Determinare A Randamentului La Angrenajele Cu Axe MobilePetrescu FlorianÎncă nu există evaluări
- Ascutirea Sculelor AschietoareDocument10 paginiAscutirea Sculelor AschietoareFelician SabouÎncă nu există evaluări
- Proiect Tehnologia Fabricatiei Cojocaru Denis An 4 MecatronicaDocument36 paginiProiect Tehnologia Fabricatiei Cojocaru Denis An 4 MecatronicaIonut NutzuÎncă nu există evaluări
- Curs Recapitulare - Structura Cristalina A MetalelorDocument17 paginiCurs Recapitulare - Structura Cristalina A MetalelorState ValentinÎncă nu există evaluări
- Prelucrarea Cu LaserDocument11 paginiPrelucrarea Cu LaserStan Daniela Veronica100% (1)
- Transmisia Cu CureleDocument27 paginiTransmisia Cu CureleTrifan EmilÎncă nu există evaluări
- Tehnologia Sudarii in PuncteDocument7 paginiTehnologia Sudarii in PunctepisicaÎncă nu există evaluări
- Proiect: Alegerea Criteriala A MaterialelorDocument10 paginiProiect: Alegerea Criteriala A Materialelorjulieteeee79100% (1)
- Catalog Adancitoare, Largitoare, Alezoare, Burghie, Cutite de Strung, Freze, TaroziDocument26 paginiCatalog Adancitoare, Largitoare, Alezoare, Burghie, Cutite de Strung, Freze, Tarozinndaniel100% (1)
- Universitatea Tehnică Gheorghe Asachi": Facultatea de Construcții de Mașini Și Management Industrial IașiDocument33 paginiUniversitatea Tehnică Gheorghe Asachi": Facultatea de Construcții de Mașini Și Management Industrial IașiPaul ZgamboiÎncă nu există evaluări
- Transmisie Mecanica Cu Reductor Si Curele Trapezoidale Inguste Lucian DragosDocument60 paginiTransmisie Mecanica Cu Reductor Si Curele Trapezoidale Inguste Lucian DragosLucian Dragos100% (1)
- Proiect ModificatDocument56 paginiProiect ModificatRony Bertone100% (1)
- Curs 2Document17 paginiCurs 2Mihai TRiscaÎncă nu există evaluări
- Utilizarea Robotilor Industriali in Operatii de SuduraDocument5 paginiUtilizarea Robotilor Industriali in Operatii de SuduraGoga PaulÎncă nu există evaluări
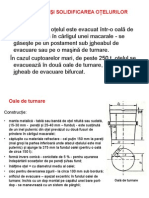
- Turnarea Si Solidificarea OtelurilorDocument107 paginiTurnarea Si Solidificarea OtelurilorVlad ImpÎncă nu există evaluări
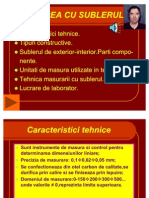
- Masurarea Cu SublerulDocument17 paginiMasurarea Cu SublerulmitoneaÎncă nu există evaluări
- Edm Proiect PDFDocument14 paginiEdm Proiect PDFFelician SabouÎncă nu există evaluări
- Generarea Suprafetelor Complexe Prin EDM Hreniuc StefanDocument14 paginiGenerarea Suprafetelor Complexe Prin EDM Hreniuc StefanRadu RstÎncă nu există evaluări
- Reglarea TemperaturiiDocument8 paginiReglarea TemperaturiigigiuippÎncă nu există evaluări
- Selectia Materialelor Proiect An IIIDocument7 paginiSelectia Materialelor Proiect An IIICalin NacevÎncă nu există evaluări
- DanturareDocument16 paginiDanturarecameliaioana16100% (1)
- Curs NR 04Document24 paginiCurs NR 04Lucian100% (1)
- Arbore IntermediarDocument44 paginiArbore Intermediarelisabeta100% (1)
- 03 - Metalurgia Pulberilor - Mihaela - 2014Document13 pagini03 - Metalurgia Pulberilor - Mihaela - 2014Laurentiu NicolaeÎncă nu există evaluări
- UI - 5 - Tehnologia AschieriiDocument20 paginiUI - 5 - Tehnologia AschieriiPetrescu BogdanÎncă nu există evaluări
- Militaru Mihai Radu - Senzori Si TraductoareDocument14 paginiMilitaru Mihai Radu - Senzori Si TraductoareNeagoeDanielÎncă nu există evaluări
- SENZORII de ProximitateDocument10 paginiSENZORII de ProximitateSimona MoraruÎncă nu există evaluări
- Prezentare - Senzor de PozitieDocument19 paginiPrezentare - Senzor de PozitiecrocrosÎncă nu există evaluări
- Senzor de Pozitie-Deplasare Analogic de Tip Potentiometric FinalDocument12 paginiSenzor de Pozitie-Deplasare Analogic de Tip Potentiometric FinalcrocrosÎncă nu există evaluări
- Examen SenzoriDocument7 paginiExamen SenzoriIustina LacatusÎncă nu există evaluări
- Curs SenzoriDocument18 paginiCurs SenzoriAnonymous Vrndt2Încă nu există evaluări
- Curs SenzoriDocument24 paginiCurs SenzoriAlex AndruÎncă nu există evaluări