Documente Academic
Documente Profesional
Documente Cultură
Mecanism Manivela Piston
Încărcat de
octaviannacisDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Mecanism Manivela Piston
Încărcat de
octaviannacisDrepturi de autor:
Formate disponibile
Cuprins
Tema proiectului ...................................................................
Mecanism manivela-piston...............................................
Mecanism cama-tachet de translatie cu rola ....................
Mecanism cu roti dintate .................................................
1. Mecanism manivela-piston
1.1. Sinteza mecanismului functie de unghiul de
presiune
1.1.1. Definitia unghiului de presiune
1.1.2. Calculul de proiectare
1.1.3. Scara reprezentarii grafice
1.2. Analiza structurala a mecanismului
1.2.1. Determinarea familiei mecanismului
1.2.2. Determinarea gradului de moilitate
1.2.3. Descompunerea mecanismului in grupe
structurale
1.3. Analiza cinematica a mecanismului prin metoda
ecuatiilor vectoriale
1.3.1. !ozitii
1.3.2. "iteze
1.3.3. Acceleratii
1.#. Analiza cinematica a mecanismului prin metoda
cinematica
1.#.1. !ozitii$ viteze$ acceleratii pentru %1&#'(
1.#.2. !ozitii$ viteze$ acceleratii pentru %1&32'(
1.). Analiza cinetostatica a mecanismului prin metoda
grafo-analitica
1.).1. Determinarea fortelor utile
1.).2. Determinarea fortelor de greutate ale
elementelor mecanismului
1.).3. Determinarea acceleratiilor centrelor de
masa
1.).#. Determinarea pozitiei centrului de masa al
ielei
1.).). Determinarea reactiunilor in cazul %1 & #'(
1.).*. Determinarea reactiunilor in cazul %1 & 32'(
2. Mecanism cama + tachet de translatie cu rola
2.1. Analiza structurala a mecanismului
2.1.1. Determinarea gradului de moilitate
2.2. Analiza cinematica a mecanismului
2.3. Determinarea parametrilor geometrici de aza la
mecanismul cama-tachet
2.3.1. Definitia unghiului de presiune
2.3.2. Determinarea parametrilor e si S' prin procedeul
grafic
2.#. Trasarea profilului camei folosind metoda grafica
3. Mecanism cu roti dintate
3.1. Analiza structurala a mecanismului
3.2. Analiza cinematica a mecanismului
3.3. Calculul elementelor geometrice ale angrena,ului
cilindric
#. -iliografie
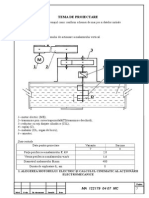
Tema proiectului
Mecanismul manivela + piston
Sa se proiecteze mecanismul unui motor cu ardere interna in
patru timpi cunoscand .
- schema structurala . desen nr. 1/
- diagrama indicata motorului p&p0s1/
p + presiunea in cilindru
s + deplasarea pistonului
- turatia motorului . n & 23)' rot2min /
- diametrul cilindrului . dcil & 1#' 0mm1/
- unghiul de presiune ma3ima . 4ma3 & 5 061 /
- raportul
cil
h
d
& 1$2) / h & cursa pistonului/
- masa ielei . m2 & 5 7 l / l& lungimea ielei 8m9 /
- masa pistonului . m3 & : 7 m2 / : & '$31/
- masa manivelei . m1 & :1 7 m2 / :1 & 2$1/
- raza de giratie a ielei . ;< & '$1= 7 l</
- pozitia centrului de masa a ielei .
2
'$ 3)
BG
l l
- pozitiile unghiulare . - %1 & 3' 869/
- %1 & 12' 869/
Mecanismul cama-tachet de translatie cu rola
Sa se analizeze si sa se proiecteze un mecanism cama- tachet
de translatie cu rola cunoscand .
- unghiul de faza .
%1 & >' 869 + unghiul fazei de urcare 0ridicare1/
%2 & 13' 869 + unghiul fazei de stationare la raza ma3ima/
%3 & =' 869 + unghiul fazei de coorare/
%# & 3*' + 0%1 ? %2 ? %31 & >' 869/ - unghiul fazei de
stationare la raza minima.
- cursa tachetului . h & )1 8mm9/
- legea de miscare a tachetului . tachetul are si la urcare si la
coorare o acceleratie sinusoidala cu perioada sinusoidei %1.
- @1 A@1 de la manivela mecanismului manivela piston.
Mecanism cu roti dintate
Sa se analizeze din punct de vedere structural si cinematic si apoi sa
se calculeze elementele geometrice ale angrena,ului cilindric conform
metodologiei standardizate pentru mecanismul reprezentat in figura
urmatoare .
Se cunosc .
nsm & 5)' 8rot2min9 & constant/
B2 & 15 8dinti9/
B3 & 23 8dinti9/
aC & 2'' 8mm9 + distanta constructiva dintre a3e/
m & 8 1$2)/ 2/ )9 8mm9 la treapta cilindrica/
me & 2 8mm9 + la treapta conica/
D & 5' 869/
@ &
1
3'
n
& 223 8 rad2s9.
1. Mecanismul manivela piston
1.1. Sinteza mecanismului functie de unghiul de
presiune
1.1.1. Definitia unghiului de presiune
En parametru deoseit de important pentru una functionare a
mecanismului este unghiul de presiune.
Acest unghi este format de directia fortei de transmise de iela si
directia vitezei punctului sau de aplicatie.
Cu cat acest unghi este mai mare cu atat solicitarea si uzura
elementelor sunt mai pronuntate$ iar randamentul este mai redus.
Daca unghiul de presiune atinge o valoare limita se produce
locarea mecanismului. De aceea se impune ca unghiul de presiune sa
nu depaseasca o valoare admisiila 4a. 4 F 4a/
Gmpunerea unghiului de presiune admisiila 4a este dictata de
procesul tehnologic sau conditiile de lucru ale mecanismului.
Alegerea unui unghi de presiune foarte mic mareste foarte mult
gaaritul. De aceea de multe ori se realizeaza o optimizare intre unghiul
de presiune si gaarit. Enghiul de presiune se poate calcula cu e3presia .
' 1 2
1
2 2
sin0 1
sin
l
l
l l
+
$
in rezolvarea ma3ima se poate calcula cu .
1 #
ma3
2
sin
l l
l
+
.
Gn cazul nostru cand #
l
& '$ unghiul de presiune se defineste ca fiind
unghiul dintre iela -C si directia t-t.
Enghiul de presiune se poate calcula cu formula .
1
2
sin
sin
l
l
/
iar unghiul de presiune ma3im .
1
ma3
2
sin
l
l
.
1.1.2. Calcule de proiectare
Cu a,utorul datelor cunoscute vom afla raza manivela si lungimea
ielei.
"om nota 1
l r
- raza manivelei$ care poate fi calculat cu e3presia .
2
h
r
$ unde
1$ 2) 1$ 2) 1#' 1=)8 9
cil
h d h h mm
$ de unde rezulta .
1=)
>=$ )8 9
2 2
h
r mm
vom adopta r & >> 8mm9/
"om nota 2
l l
- lungimea ielei care se poate calcula in functie de
unghiul de presiune ma3im si raza manivelei.
Atunci cand unghiul 4 ia valoare ma3ima$ intre manivela si a3a
pistonului se formeaza un unghi de 5'
.
ma3
ma3
>>
sin )*#$1
sin '$1)*
r r
l
l
l&)*#$1 8mm9&'$)*# 8m9/
1.1.3. Scara reprezentarii grafice
"om calcula scara functie de dimensiunea cea mai mare si anume
iela.
1
8 9
8 9
lungimea reala m
K
lungimea reprezentata mm
K
K
Hungimea reala 8m9 & '$)*# 8m9
Hungimea reprezentata 8mm9 & 1'' 8mm9
1
'$ )*#
'$ '')*
1''
m
k
mm
1
1
]
,
l- reprezentat & 1'' 8mm],
r- reprezentat =
'$ '>>
1=$ *8 9
'$ '')
mm
Marimea reala
8m9
Marimea reprezentata
8mm9
1
l
'$'>> 1=$*
2
l
'$)*# 1''
1.2. Analiza structurala a mecanismului
1.2.1. Determinarea familiei mecanismului
Definitie Iamilia unui mecanism 0sau lant cinematic1 este egala cu
numarul de legaturi comune la care sunt supuse elementele sale.
Miscare
Jlement
Kotatie Translatie
x
x
V
y
V
z
V
1 - - ? - - -
2 - - ? ? ? -
3 - - - - ? -
# - - - - - -
L- L nu se efectuiaza miscare
L?M se efectuiaza miscare
f & 3
1.2.2. Determinarea gradului de mo!ilitate
Definitii.
a1 Nradul de liertate al unui lant cinematic reprezinta numarul de
parametri independenti care determina complet pozitia sa.
1 Nradul de moilitate reprezinta numarul parametrilor
independenti care pozitioneaza elementele moile ale unui mecanism
fata de elementul fi3.
c1 !rin mecanism se intelege un lant ciematic care satisface
urmatoarele conditii.
- este inchis/
- are un element de referinta$ element fi3$ in raport cu care se
studiaza miscarea celorlalte elemente/
- are un numar de cuple conducatoare$ stailit astfel ca miscarea
tuturor elementelor sa fie determinata/
d1 Cupla cinematica este legatura moila stricta dintre doua
elemente cinematice.
e1 Clasa unei cuple cinematice este data de numarul de restrictii
impuse miscarii elementului.
M - 3n + 2C) + C# unde.
n + numarul elementelor moile
C) + numarul cuplelor de clasa "
C# + numarul cuplelor de clasa G"
M + gradul de moilitate
1.2.3. Descompunerea mecanismului in grupe structurale
Definitie . !rin grupa structurala se intelege cel mai simplu lant
cinematic cu grad de moilitate egal cu zero.
Se procedeaza invers ca la formarea acestuia. se indeparteaza
elementul conducator si elementul fi3 si se identifica grupele structurale
din componenta mecanismului.
Nrupa condusa
H & '
cls & 2
ord. & 2
asp. & 2
1.3. Analiza cinematica a mecanismului prin metoda
ecuatiilor "ectoriale #metoda grafo $ analitica%
1.3.1. !ozitii . 11 %1 & 3' 6 / %1 & 12' 6
Din masurarea directa de pe desen rezulta .
21 %2 & 3)*6 / % & 3)26
11 H3 & *3> 8mm9/ H3 & )1) 8mm9
1.3.2. "iteze .
Date cunoscute . @1 & constant
"A & '
[ ]
1
2
2#)$ 5= 2#* 2
*' 3'
n n
rad s
;
De aflat . "-$ "C$ @z$ "C-.
G. Nrupa conducatoare 01$1$11.
"- & "A ? "-A
1 BA
V AB
Odirectie .
A-
modul . 1 AB
l
sens . A- rotit cu 5'6
in sensul lui 1
"- & 2#* 7 '$'>> & 21$*) 8m2s9
1
21$ *)
'$ #3
)'
B
V
V
V m s
k
P mm
1
1
]
GG. Nrupa condusa 0'$2$21.
"C & "- ? "C- 011
"C & "c ghida, ? "cc ghida, 021
"c ghida, & '
011& 021 P B CB Cghidaj CCghidaj
V V V V + +
"C- & @2 3 -C Odirectie .
-C "CC ghida, O directie .
P
ghida,
Sens . - sens . -
Modul . - modul . -
!entru
1
3'
21$ *#8 2 9
B CB
V V m s
12$ '#8 2 9
C CCghidaj
V V m s
2
21$ *#
3>$ *#8 2 9
'$ )*
rad s
!entru 1
12'
[ ] '$ # 2) 1'
CB V BC
V K l m s
0 1 '$ # #' 1*8 2 9
C CCghidaj V puc
V V K l m s
2
1'
1=$ >)8 2 9
'$ )*
CB
CB
V
rad s
l
1.3.3. Acceleratii
G. Nrupa conducatoare 01$1$11
1 1
tan '$ '
A
cons t a
n t
B A BA BA
a a a a + +
2 2
1 1
.
mod .
.
n
BA AB
directie AB
a AB ul l
sens B A
' ;
P
2
1 2
2#* '$ '>> )32)$ #
n
BA AB
m
a l
s
1
1
]
1
.
mod '
'
t
BA
directia AB
a AB ul
sens
' ;
2
)32)$ #8 2 9
n t
B A BA BA
a a a a m s + +
2
2
8 2 9
)32)$ # 8 2 9
**$ )*
8 9 >' 8 9
n
BA
a
ba
a m s
m s
k
P mm mm
Nrupa condusa 0'$2$21
C# + proiectia punctului C pe ghida,
#
'
C
a
# # #
n t
C B CB CB
r C
C C CC CC
a a a a
a a a a
+ +
+ +
# #
#
2
C
CC CC
a V
2
2
mod .
.
n
CB CB
directia CB
a ul l
sens C B
' ;
P
2
Q
2
Q
2
2
8 2 9
8 2 9
8 2 9
C a pac
t
CB a nc
t
CB
CB
a k l m s
a k l m s
a
rad s
l
!entru 1
3'
2
2
2 2 2
2
2
2
2
'
3>$ *# '$ )* >3*8 2 9
*= #3 2>>18 2 9
*= )3 3))18 2 9
2>>1
)1#)8 2 9
'$ )*
t
CB CB
n
CB CB
t
CB
C
t
CB
z
CB
a l
a l m s
a m s
a m s
a
rad s
l
!entru 1
12'
2
2
2
*= *= ##>58 2 9
*= 3> 2)#*8 2 9
##>5
>'1*8 2 9
'$ )*
t
CB
C
t
CB
z
CB
a m s
a m s
a
rad s
l
1.#. Analiza cinematica a mecanismului prin
metoda analitica. Metoda contururilor vectoriale
Se cunosc .
1 3
1
1
$
$
$
'
AB BC
l l
De aflat .
2
2
2
$
$
$
C
C
C
X
V
a
Calculul numarului de contururi vectoriale independente.
# 3 1
K
C n
unde.
- numarul contururilor vectoriale independente
K
C
- numarul cuplelor cinematice din mecanism
n - numarul elementelor moile din mecanism
1.#.1. !ozitii$ viteze$ acceleratii pentru 1 3
3' $ 1>'
Avem conturul inchis A-CD$
A- ? -C ? CA & '
G 1 !arametrii cinematici de pozitie.
RS T
( )
1 2 3
2
cos cos cos '
cos3' cos ' 1
C
C
r l X
r l X
+
+
RU T
( )
( )
1 2 3
1
2 1 2
1
2
sin sin sin ' 2
sin
sin sin sin
sin '$ '>> '$ )
arcsin arcsin arcsin '$ '=> #$ #=
'$ )*
C
r l X
r
l r
l
r
l
+ +
_ _
, ,
2 2
3*' #$ #= 3))$ )/ 3))$ )
Din 011
1 2
cos cos '
C
r l X +
1 2
cos cos '$ '>> cos3' '$ )*cos3))$ ) '$ '= '$ )) '$ *2
C
X r l + + +
[ ] '$ *2
C
X m
GG 1 "iteze 1
3'
( )
1 2
1 2 1 1 2 2
2Q cos cos ' cos cos '
d d
r l r l
dt dt
+ +
1 1
2
2
cos >> '$>* 2#*
33$ )>
cos )*' '$ 55
r
l
2
33$ )>
rad
s
]
( )
1 1 2
1Q sin sin '
C
r l V
( ) [ ]
1 1 2 2
sin sin
>> 2#* '$ ) )*' 33$ )> '$ '= 1'>2# 131*$ 33 5)'=$ *
C
C
V r l
V mm s
+
[ ] 5$ )'
C
V m s
GGG 1 Acceleratii
( )
( )
2 2
1 1 1 1 2 2 2 2
2 2 2 2
1 1 2 2
2
2
2
2
2
2Q cos sin cos sin '
2#* >> '$ ) 33$ )> )*' '$ '= sin sin
cos )*' '$ 55
2**2='# ##2'2
#=23$1
))#$ #
#=23$1
l r l l
r l
l
rad s
rad s
+
+ +
1
]
1
]
( )
( )
2 2
1 1 1 1 2 2 2 2
2 2
1 1 1 1 2 2 2 2
2 2
2
1Q sin cos sin cos '
sin cos sin cos
2#* '$ '>> '$>* #=23$1 '$ '= 33$ )> '$ )* '$ 55
#)=5 1>) *2) #135
#135
C
C
C
r r l l a
a l r l l
a m s
+
1
]
1.#.2. !ozitii$ viteze$ acceleratii pentru 1 3
12' $ 1>'
Avem conturul inchis A-CA
A- ? -C ? CA & '
G 1 !arametrii cinematici de pozitie .
RS T
( )
1 2 3
1 2 2
cos cos cos '
cos cos ' 1
C
C
r l X
r l X
+ +
+
RU T
( )
( )
1 2 3
1 1
2 1 2 2
2
2
sin sin sin ' 2
sin sin
sin sin sin arcsin
arcsin '$13)
3)2$ 2
C
r l X
r r
l r
l l
+ +
_
,
( )
[ ]
1 2
1 2
1 cos cos '
cos cos '$ '>>cos12' '$ )*cos3)2$ 2
'$ '## '$ ))# '$ )1
'$ )1
C
C
C
Din r l X
X r l
X m
+
+ +
+
GG 1 "iteze
( )
( )
[ ]
1 2
1 2
1 1 2 2
1 1
2
2
2
2 Q cos cos '
cos cos '
>> '$ ) 2)* cos
15$ )2
cos )*' '$ 55
15$ )2
d d
r l
dt dt
r l
r
l
rad s
+
+
( )
( )
[ ]
1 1 2 2
1 1 2 2
1 Q sin sin '
sin sin
>> 2#* '$>* )*' 15$ )2 '$13 1>*1= 1#21
1=
C
C
C
C
r l V
V r l
V
V m s
+
GGG 1 Acceleratii
( )
( )
[ ]
( )
2 2
1 1 1 1 2 2 2 2
2 2 2 2
1 1 2 2
2
2
3
2
2
2 2
1 1 1 1 2 2 2
2 QQ cos sin cos sin '
2#* '$ '>> '$ >* 15$ )2 '$ )* '$13 sin sin
cos )*' '$ 55
#)=5$> 2=$ =
>$ 21'> 1'
))#$ #
>21'$>
1 QQ sin cos sin cos
l r l l
r l
l
rad s
r r l l
+
+ +
2
2 2
1 1 1 1 2 2 2 2
2 2
2
'
sin cos sin cos
2#* '$ '>> '$ ) >21'$> '$ )* '$13 15$ )2 '$ )* '$ 55
2)3#$ # )5=$ '5 211$ 2#
252'
C
C
C
a
a l r l l
a m s
+
+
1
]
1.). Analiza cinetostatica a mecanismului prin
metoda grafo + analitica
Gn cazul analizei cinetostatice se propune sa se determine fortele de
legatura 0 reactiunile normale si fortele de frecare 1 utilizand principiul
lui DVAlamert $ care arata ca in orice moment al miscarii fortelor
aplicate$ fortele de legatura si fortele de inertie se gasesc in echiliru.
Se ia s & h & 1=) mm &W s & 1=) mm intre !MG si !MS.
!entru
1 3 1 1 2 # 2
)
2 1
1'
3' *3> 0 1 3 3
1'
3 1'
da
! mm P"# P P
cm cm
P
m
!entru 1 3
12' )1) ! mm
0 ac si vc au sensuri opuse 1 &W p2 se ia de
la cura 2 &W
)
2 2 2 2
> > 1'
da
p p
cm m
1.).1. Determinarea fortelor utile
Kelatia de calcul a fortelor utile este .
2
#
$
D
% p
Iorta utila are .
- punct de aplicatie in C$
- directia paralela cu ghida,ul/
- sens 011 daca "C si ac coincid ca sens$ atunci Iv se ia din cura 3 $
sensul fiind al vitezei/
- sens 021 daca "C si ac nu coincid ca sens$ Iv se ia din cura 2$
sensul fiind opus vitezei.
Din datele initiale .
2
1#' 1# 1'
cil
d mm m
!entru
) 2 #
1 1
3 1' 1# 1'
3'
#
$
%
1
#*1).>
$
% ;
!entru
) 2 #
1 1
> 1' 1# 1'
12'
#
$
%
2
123'>.>
$
% ;
1.).2. Determinarea fortelor de greutate ale elementelor mecanismului
Din datele initiale .
2
2 2 2 2
2
5 )$ '>
'$ )*# )$ '> 5$> )'
5$>
BC
m l Kg
l l m G m g G
g m s
' ;
;
3 2
3 3 3
2
2
'$ 31 )$ '> 1$ )=
'$ 31
1$ )= 5$ > 1)
)$ '>
5$>
m K m Kg
K
G m g G
m Kg
g m s
' ;
;
1 1 1 2
1 1 1
2
1
1'$ *=
1'$ *= 5$> 1')
2$1 5$>
m Kg m k m
G m g G
k g m s
' ; ' ;
;
1.).3. Determinarea acceleratiilor centrelor de masa
Din diagrama acceleratiilor se determina
2
G
a
care are forma vectoriala.
2 2
2
n t
G B B G B a a a a + +
!entru
1 2
3' . 0 1 #) '.3) #) 1).=)
c s
b mm g b mm
( )
2 2 2
2
2
2
*=
0 1 *= *= ##>5
*=
G
#
G G # a G
a
a mm
a a K a m s
m s
K
mm
' ;
!entru
1 2
12' . 0 1 X '.3) *> 23.>
c s
b mm g b mm
( )
2 2 2
2
2
2
*1
0 1 #'>=
*=
G
#
G G # a G
a
a mm
a a K a m s
m s
K
mm
' ;
1.).#. Determinarea pozitiei centrului de masa al ielei
Din date initiale .
[ ]
[ ]
2
2
2 2
'$ 3) 0 1 '$ 3) 1'' 3)
'$ )*# '$ 3) '$15=
BG #
l l BG mm
BG BG m
!entru
[ ]
2
1
3' . 0 1 ) '$ '') '.'2)
G #
b m
!entru
[ ]
2
1
12' . 0 1 > '$ '') '.'#
G #
b m
1.).). Determinarea reactiunilor in cazul 1
3'
Nrupa condusa
11
( )
'
' " %
pentru elementul 2
2 2
12 2 2 2
'
i
t
BC G i % i
& l G B % b " +
2
2
2
2 2
2
mod . )$ '> ##>5 22>'#.12
. . .
. . .
i G
i
G
G
ul % m a
% directie paralela cu a
sens opus lui a
' ;
( ) ( ) [ ]
12 2 2
1
1* )* 1* '$>5*
i i
% % %
#
b mm b K b m
[ ]
12
'.>5
%
b m
12 2 2
2
2
mod . 8 9
. . . .
. .
i
i
ul ' " m
" directie perpendiculara pe planul X()
sens opus lui
' ;
[ ]
2 2
2 2
'.'> '.'> ).'> '.)* )1#= *)*
i bc
" m l m
2 2
2 2 2
12
*)* 22>'#.12 '.>5 )' '.') 13313.5* 2.)
23=='.#*
'.)*' '.)*'
i
i i % G t
BC
" % b G b
&
l
+
3 3
3
mod . 1$ )= 3))1 ))=).'=
. . .
. . .
i c
i
C
C
ul % m a
% directie paralela cu a
sens opus lui a
' ;
21
[ ] [ ]
12 2 2 3 2 3
12
'/ '
#*1).>
23'.=5 23'
0 1 2'
t
n
i $ i
u
% %
u #
% & & G % % G % &
%
K m mm K m mm
%
+ + + + + + +
;
Se scriu toate fortele aflate la scara .
( ) ( )
( )
( ) ( )
( )
12
12
2
2
2
2
3
3
3
3
23=='.#*
0 1 1'3.3#
23'
)'
'.21 .
23'
22>'#.12
55.1#
23'
0 1 2'
1)
'.'* .
23'
))=).'=
2#.23
23'
t
t
#
%
#
%
i
i
#
%
u #
#
%
i
i
#
%
&
& mm
K
G
G mm se neglijeaza
K
%
% mm
K
% mm
G
G mm se neglijeaza
K
%
% mm
K
Cele doua necunoscute 12
n
&
si 23
&
se determina grafic.
( ) ( )
12 12 12
X X X X
n n n
%
# #
& mm & K &
31 Y I & ' / pentru elementul 2.
12 12 2 2 23
'
t n
i
& & % G & + + + +
Se determina grafic
( ) ( )
23 23 23
X X
%
# #
& mm & K &
#1
( )
( )
( )
( )
2
3
3
' 3 3 3
3
3
3
'. '
X
X
X
$
$
$ r% rG g
G
#
%
#
$ G
g
" % % b G b & !
b mm
b mm
% G b
&
!
Nrupa conducatoare 21 12
& &
11 21 #1 1
'. ' % & & G + +
Se determina grafic #1
&
( )
( ) ( )
1
1
#1 #1 #1
X
X
X
X X
#
%
%
# #
G
G mm
K
& mm & K &
21
( ) '
A
" %
pentru elementul 1
[ ]
21 21 21
21 21
' ' . '
'
& & &
r e e r r
e
& b " " & b deoarece b
" m
+
1.).*. Determinarea reactiunilor in cazul 1
12'
Nrupa condusa
11
( )
'
' " %
pentru elementul 2
2 2
12 2 2 2
X
i
t
BC G i % i
& l G B % b " +
2
2
2
2 2
2
mod . )$ '> #'>= 2'=*1.5*
. . .
. . .
i G
i
G
G
ul % m a
% directie paralela cu a
sens opus lui a
' ;
( ) ( ) [ ]
12 2 2
1
22 )* 22 1232
i i
% % %
#
b mm b K b m
12 2
2
2
mod .
. . . .
. .
i
i
ul ' "
" directie perpendiculara pe planul X()
sens opus lui
' ;
2 2
2 2 2
12
X
i
i i % G t
BC
" % b G b
&
l
+
3 3
3
mod . 1$ )= 2)#* 355=.22
. . .
. . .
i c
i
C
C
ul % m a
% directie paralela cu a
sens opus lui a
' ;
21
[ ] [ ]
12 2 2 3 2 3
12
2
2
'. '
123'>.>
2#*.1= 2#*
0 1 )'
t
n
i $ i
$
% %
$ #
% & & G % % G % &
%
K m mm K m mm
%
+ + + + + + +
;
Se scriu toate fortele aflate la scara .
( ) ( )
( )
( ) ( )
( )
12
12
2
2
2
2
3
3
3
3
X
0 1 1'3.3#
2#*
)'
'.2' .
2#*
2'=*1.5*
>#.35
2#*
0 1 )'
1)
'.'* .
2#*
355=.22
1*.2#
2#*
t
t
#
%
#
%
i
i
#
%
u #
#
%
i
i
#
%
&
& mm
K
G
G mm se neglijeaza
K
%
% mm
K
% mm
G
G mm se neglijeaza
K
%
% mm
K
Cele doua necunoscute 12
n
&
si 23
&
se determina grafic.
( ) ( )
12 12 12
X X X X
n n n
%
# #
& mm & K &
31 Y I & ' / pentru elementul 2.
12 12 2 2 23
'
t n
i
& & % G & + + + +
Se determina grafic
( ) ( )
23 23 23
X X
%
# #
& mm & K &
#1
( )
( )
( )
( )
2
3
3
' 3 3 3
3
3
3
'. '
X
X
X
$
$
$ r% rG g
G
#
%
#
$ G
g
" % % b G b & !
b mm
b mm
% G b
&
!
Nrupa conducatoare 21 12
& &
11 21 #1 1
'. ' % & & G + +
Se determina grafic #1
&
( )
( ) ( )
1
1
#1 #1 #1
X
X
X
X X
#
%
%
# #
G
G mm
K
& mm & K &
21
( ) '
A
" %
pentru elementul 1
[ ]
21 21 21
21 21
' ' . '
'
& & &
r e e r r
e
& b " " & b deoarece b
" m
+
2. Mecanism cama-tachet de translatie cu rola
2.1. Analiza structurala a mecanismului
Mecanismul cama-tachet de translatie cu rola este un mecanism de
familia a +GGG- a deoarece miscarea tuturor elementelor mecanismului se
face paralela cu un plan dat SRU.
Cunoscand familia$ sa se determine gradul de moilitate si apoi
transformarea cuplei superioare 0 de clasa G" 1 si sa se descompuna
mecanismul in grupe structurale.
GG.1.1. Determinarea gradului de moilitate
( ) ( ) ( ) ( ) ( ) ( )
) # 2 1
* 1 ) # 2 1 " * n * C * C * C * C
Gn cazul mecanismului cama-tachet de translatie cu rola avem.
( ) ( ) ( ) ( )
( )
( )
( )
( )
) #
) #
)
#
* 1 ) #
3 1 2
# 1$ 2$ 3$ #
3
3 $ $
1
5 * 1 2
" * n * C * C
" n C C
n
*
C A C D
C B
"
M & 2 0 grad de moilitate teoretic 1
Jlementul 2 este elementul pasiv deoarece rola se foloseste doar
pentru miscarea frecarii / din frecarea de alunecare se trece prin
intermediul rolei la o frecare de rostogolire.
Gn acest caz . ) #
3$ 2$ 1. n C C
3 2 2 2 1 1 1 "
0 grad de moilitate real 1
GG.2. Analiza cinematica a mecanismului
Analiza cinematica urmareste determinarea parametrilor de pozitie
si cinematici ai tachetului$ cunoscand caracteristicile constructive ale
mecanismului. Miscarea camei este uniforma.
Miscarea tachetului se face cu o acceleratie sinusoidala.
Aceasta lege de miscare se caracterizeaza prin variatia acceleratiei
dupa o lege sinusoidala cu perioada %1.
Jcuatiile sunt .
2
2 2
1
1
1
1
2
1
1 2 2
1
2
sin $
2
cos $
2
2
sin $
#
a d #
C
d
V d#
C C
d
# C C C
_
,
_
+
' ;
,
_
+ +
,
Conditiile pentru determinarea constantelor de integrare la urcare
sunt . la
'$ '/
V
la 1
$ # h
si la
'$ ' #
de unde rezulta .
1 2 2
1 1
2
$ $ '
h h
c C C
$ iar ecuatiile devin .
1 1
1 1
2 2
1 1
2
sin
2
2
1 cos $
2 2
sin
h h
#
V h
a h
_
' ;
,
!entru cursa de coorare se impun urmatoarele conditii fata de
originea RV translata . Ha
'$ # h
/ la 3
$ ' #
/ la
'$ '
V
/ de unde
rezulta . 1 2 2
3 3
2
$ $
h h
C C C h
$ iar ecuatiile devin .
3 3
3 3
2 2
3 1
2
sin
2
2
cos 1
2 2
sin
h h
# h
V h
a h
+
_
' ;
,
!entru trasarea diagramelor se vor intocmi taelele .
1
' 1' 2' 3' #' )' *' =' >'
1
>'
)1 h mm
#
'
'$*33 #$*2> 13$3#' 2)$#53 3=$** #*$3=2 )'$3*= )1
V
'
1'$*5) 2)$>3# *2$25' =3$')5 *2$25' 2)$>3# 1'$*5) '
2
a
'
11*$15 1*#$3# 11*$15 ' -115$152 -1*#$3## -11*$152 '
[ ]
[ ]
[ ]
[ ]
2
'$ ')1
'$ ''1
)1
#
lreala m m
V a
K K K
lreprezentat mm mm
3
' 1' 2' 3' #' )' *' ='
3
='
)1 h mm
#
)1 )'.'* ##.3# 32.*55 1>.32) *.**) '.525 '
V
' -1).=21 -)1.')1 -=5.3#* -=5.3#* -)1.')1 -1).=21 '
2
a
' -1*=.5#1-2'5.#)=-1*=.5#1 1*=.5#1 2'5.#)= 1*=.5#1 '
GG.3. Determinarea parametrilor geometrici de aza
la mecanismul cama + tachet
!arametrii geometrici de aza sunt caracteristici constante care$
impreuna cu profilul camei$ definesc din punct de vedere constructiv$
mecanismul. Acesti parametri determina raza minima si raza ma3ima a
camei 0 in cazul mecanismelor plane 1 si deci gaaritul acestuia.
!entru mecanismul cama - tachet de translatie cu rola parametrii
geometrici de aza sunt .
e + e3centricitate
'
#
- distanta de la centrul rolei la centrul de rotatie al camei
Cu aceasta se pot scrie relatiile .
( )
2 2
min '
2
2
ma3 '
r e #
r e # h
+
+ +
2.3.1. Definirea unghiului de presiune
Gn cazul mecanismelor cu tachet cu rola$ determinarea parametrilor
geometrici de aza este legata de notiunea de unghi de presiune.
!rin unghi de presiune se intelege unghiul format intre normala la
profilul camei in punctul de contact si directia vitezei unui punct al
tachetului.
"aloarea unghiului de presiune are o importanta esentiala pentru
functionarea mecanismului. Cu cat acest unghi este mai mare$ solicitarile
elementelor si uzura mecanismului devin mai pronuntate$ iar
randamentul scade. J3ista o valoare a unghiului de presiune numita
unghi de locare$ care provoaca mecanismului.
Ca urmare$ unghiul de presiune
$ treuie sa satisfaca relatia .
a
( ) 1
$ unde .
a
- unghiul de presiune admisiil
!entru a satisface relatia
( ) 1
este necesar sa se cunoasca e3presia
unghiului de presiune functie de parametrii functionali si constructivi ai
mecanismului .
Gn cazul mecanismelor cama-tachet de translatie cu rola$ unghiul de
presiune
se formeaza intre normele nn si a3a tachetului 0 RU 1 dar si
intre tt si perpendiculara pe a3a tachetului 0 RS 1.
Gn acest caz se poate scrie e3presia unghiului de presiune .
( )
'
2
V
e
tg
# #
+
. Gn formula
( ) 2
toti prametrii reprezinta marimi orientate$
iar semnul fiecaruia se staileste prin comparatie cu sensul a3elor de
coordonate.
2.3.2. Determinarea parametrilor e si S' prin procedeul grafic
Se considera tachetul intr-o pozitie oarecare$ cu centrul rolei intr-un
punct A. Se aplica in acest punct vectorul
V
si apoi se raate cu
5'
in
sensul lui
. Se procedeaza in acelasi mod pentru mai multe pozitii$
unele considerate in faza de ridicare$ iar altele in faza de coorare.
J3tremitatile vectorilor otinuti se unesc prin linie continua. Se otine
astfel o diagrama
V
#
_
,
. Scarile de reprezentare pentru S si
V
treuie sa
aia aceeasi valoare. A3a tachetului imparte cura in doua ramuri . una
corespunzatoare ridicarii$ iar cealalta coorarii.
Gn continuare se traseaza dreapta 1
+
- tangenta la ramura de ridicare
si dreapta 2
+
prin punctul '
A
$ amele formand cu a3a tachetului unghiul
a$
- unghiul de presiune admisiil la urcare.
Analog se traseaza dreptele 1
C
si 2
C
pentru ramura de coorare
inclinate cu unghiul ac
- unghi de presiune admisiil la coorare. Centrul
de rotatie al camei R se poate adopta in zona situata in intregime su
cele # drepte.
Cunoscand pozitia centrului de rotatie al camei se cunosc implicit
parametrii e si s' .
!entru a otine o cama cu gaarit minim treuie sa adoptam centrul
camei astfel ca raza ma3ima sa aia valoarea cea mai mica.
Scara
'$ ''1
# V
m
K K
mm
1
1
]
De pe grafic rezulta .
3' / e mm
3' '.'3
#
e mm K
'
*' # mm
'
*' '.'*
#
# mm K m
( )
2 2
min '
2
2
ma3 '
'.'*=
'.11#
r e # m
r e # h m
+
+ +
2.#. Trasarea profilului camei folosind metoda grafica
Trasarea grafica se azeaza pe construirea unui sir de pozitii
succesive ale tachetului in raport cu planul camei. !entru aceasta se
aplica procedeul inversarii miscarilor.
Se otine planul camei fi3 si se deplaseaza elementul care in
realitate este imoil in sens invers deplasarii reale a camei.
!rofilul teoretic se otine unind punctele care in pozitiile succesive
reprezinta centrul rolei.
!rofilul real rezulta prin infasurarea cercurilor care reprezinta rola.
Dimensiunile mecanismului sunt .
e & 3' mm
S' & *' mm
min
ma3
#=
2'
#=
5#
rola
real
real
real
& mm
& mm
r mm
r mm
3. Mecanism cu roti dintate
3.1. Analiza structurala a mecanismului
Mecanismul cu roti dintate contine atat cuple inferioare$ cat si cuple
superioare. !entru a determina familia oservam ca elementele se
deplaseaza si se rotesc paralele cu un plan fi3$ deci f & 3.
) #
3 2
3 3 2 3 2
1
" n C C
"
"
3.2. Analiza cinematica a mecanismului
3 1 1
12 3#
2 # #
5)'
'$ #
23)'
n
igl i i
n
deoarece 2 3
. Gmpunem ca
distanta ,
a
sa fie egala cu distanta de referinta dintre a3e.
( )
( )
1 2
1 2 1 2
2 2
2
,
m z z
a a m z z a mz mz a
+
+ +
/
unde .
2
1
) /
2
*1
2''
m mm
a mz
z
a mm m
' ;
dinti
[ ]
1 1 1 1 1
12 2
2 2 2 2
3#
12
5)' *1
3')' min
15
'.##*
1.#3#
'.311
n m z n z
i n rot
n m z z
igl
i
i
Se considera impus 3
23 z
dinti
#
)# # 3 3# #
3
3).>)
z
i z z i z
z
dinti.
Se adopta #
3* z
dinti.
3.3. Calculul elementelor geometrice
ale angrena,ului cilindric
Date initiale pri"ind definirea geometrica a danturii
angrena&ului
!oz. Denumirea parametrului geometric Iormula de calcul "aloarea E.M.
1
Zumere de dinti
1
2
/
.
-
-
-
-
*1
15
-
-
2
Enghiu de inclinare a dintelui
( ) - ' [ ]
3 Modul 0 standardizat 1 STAS >22 + >2 ) [ ] mm
# Modul 0 normal 1 STAS >22 + >2 ) [ ] mm
!rofilul de referinta standardizat
[
no
h
ao
\
C
STAS >22 - >2 2'V
1.'
'.2)
-
Calculul parametrilor de !aza al rotii dintate si
angrena&ului
!oz.Denumirea parametrului Iormula de calcul "aloarea E.M.
geometric
1 [
n
& [
no
h
an
\
&h
ao
\
c
n
\
&C
o
\
-
-
-
2'V
1.'
'.2)
-
-
-
2 Enghiul de presiune de
referin]^ frontal
( ) cos
n
t arctg tg 2' [ ]
3 Modulul frontal
cos
mn
mt
) [ ] mm
# Distan]a dintre a3e de
referin]^ 0a1
( )
1 2
2
mt - -
a
+
2'' [ ] mm
) Enghiul de angrenare
frontal
( ) arccos cos
,
,
a
t t
a
_
,
2' [ ]
* Coeficientul normal al
deplas^rilor de profil
_nsumat 3
ns
( )
( )
1 2
2
n# .t t
n
- -
X in$ in$
tg
+
' [ ]
= Kepartizarea
coeficientului deplas^rilor
de profil pe celedou^ ro]i
3
n1
3
n2
Marimea
n#
X
se repartizeaza pe
cele doua roti dupa criteriul
admisastfel incat .
1 2 n n n#
X X X +
- -
> Stailirea coeficientilor
deplasarii de profil
1
2
X
X
- ?'.)
-'.)
-
5 Gnvoluta unghiului de
angrenare
.t t t t
in$ in$ tg
'.1#5 -
1'Enghiul de angrenare ( ) arg
.t .t
in$ 2' [ ]
11Diametrul de divizare
1 1
2 2
d mt -
d mt -
3')
5)
[ ] mm
12Diametrul cercurilor de
picior
( )
( )
\ \
1 1 1
\ \
2 2 2
2
2
n
n
a n n
a n n
d* d mn h C X
d* d mn h C X
25=.)
==.) [ ] mm
13Gnaltimea de referinta a
dintelui 0h1
( )
\ \
2
n
a n
h h C mn +
11.2) [ ] mm
1#Diametrele cercurilor de
cap
1 1
2 2
2
2
da d* h
da d* h
+
+
32'
1''
[ ] mm
1)Diametrele de rostogolire
1 1
2 2
cos
cos
cos
cos
t
d. d
.t
t
d. d
.t
3')
5)
[ ] mm
1*Diametrele de aza
1 1
2 2
cos
cos
db d t
db d t
2>*.*
>5.2=
[ ] mm
1=Enghiul de presiune
frontal la capul dintelui
1
1
1
2
2
2
arccos
arccos
a
a
db
t
da
db
t
da
,
_
,
2*.#1
2*.=>
[ ]
1>Enghiul de inclinare pe
cilindrul de aza
( )
b
( ) arcsin sin cos
b
an ' [ ]
15Enghiul de inclinare pe
cilindrul de cap
( )
a!
1
a!
a!
arctg tg
1
]
' [ ]
2'Coeficientul normal
minim de deplasare a
profilului in limita
sutaierii
2
1 \ 1
min
2
2 \ 2
min
sin
2 cos
sin
2 cos
n
n
a
a
- t
Xn h
- t
Xn h
-2.)*
-'.*1
-
21"erificarea lipsei de
sutaieri
( )
( )
min 1
min 2
!
!
Xn Xn a
Xn Xn a
-
-
22Coeficientul de scurtare a
capului dintelui
1 2
cos
1
2 cos cos
C n#
- - t
D X
.t
+ _
,
' -
23Kaza de curura a
profilului frontal in
punctul de intrare2iesire
din angrenare
1 2 2
2 1 1
sin '$ )
sin '$ )
. -, a
. -, a
* a db tg t
* a db tg t
#).>=
-2.=*
[ ] mm
2#`ocul la cap ( )
( )
1 2 1
2 1 2
'$ )
'$ )
,
,
C a d* da
C a d* da
+
+
1.2)
1.2)
[ ] mm
2)"erificarea e3istentei
,ocului la cap preconizat
( )
( )
1
2
'$ 2
'$ 2
C mn a
C mn a
-
-
2*Nradul de acoperire
frontal
2 2 2 2
1 1 2 2
2 sin
2 cos
da db da db a. t.
mn t
1.>#5 -
2=Nradul de acoperire a3ial
sin
'$ 2 '$ *
a
b
mn
b a
a
'.>=
&#'
-
2> Nradul de acoperire total
+
2.=15 -
Calculul dimensiunilor de masurare ale danturii
!oz. Denumirea parametrului geometric Iormula de calcul "aloarea E.M.
1 Enghiul de presiune frontal pe
cilindrul de diametrul
2
n n
d X m +
1
2
1 1
2
1
2 2
cos
arccos
2 cos
cos
arccos
2 cos
n
- t
t.
- X
- t
t.
- X
1
+
]
1
1
+
]
22.#
2*.=>
[ ]
2 Zumarul teoretic de dinti pentru
masurarea lungimii 0cotei 1
peste dinti
1 1 1
1 2
1
2 2 2
2 2
2
2
cos
2
cos
, n n
b
, n n
b
tg t X tg -
in$ t
-
tg t X tg -
in$ t
-
1
1
]
1
1
]
#.55
2.'3 dinti
3 Zumarul real 0 adoptat 1 de
dinti pentru masurarea lungimii
0 cotei 1 peste dinti
( ) 1 2
reprezinta rotun,irea la valoarea
intreaga adoptata a valoarii
( ) 1 2
'$ ) +
)
3 dinti
# Hungimea 0 cota 1 normala peste
Z dinti
( )
( )
1 1
1
1
2 2
2
2
'$ ) 2
cos
'$ ) 2
cos
n
n n n
n
n
n n n
n
X
, m
tg - in$ t
X
, m
tg - in$ t
+ 1
1
+
]
+ 1
1
+
]
11'.>2
>1.#2
[ ] mm
) Kaza de curura a profilului
frontal la capatul dintelui
1 1 1
2 2 2
'$ )
'$ )
a b a
a b a
d tg t
d tg t
=1.1**
22.)2=
[ ] mm
* "erificarea incadrarii punctelor
de contact
n
,
pe flancurile
evolventice ale dintelui
1
1 1
2
2 2
'$ )
cos
'$ )
cos
n
a
n
a
,
*
,
*
< <
< <
#).>=a
11'.>2
-2.=*a
>1.#2
-
= Coarda constanta normala a
dintelui
2
1 1
2
2 2
cos sin 2
2
cos sin 2
2
an n n n n
an n n n n
# X m
# X m
_
+
,
_
+
,
>.)#
).33
[ ] mm
> Gnaltimea la coarda constanta a
dintelui
( )
( )
1 1 1 1
2 2 2 2
'$ )
'$ )
an an n
an an n
h da d # tg
h da d # tg
).5#)
2.#)3
[ ] mm
5 Conditia de masurare a coardei
1 1 1
2 2 2
cos
'$ )
cos
cos
'$ )
cos
b
an
n
b
an
n
* db tg t #
* db tg t #
_
< +
,
_
< +
,
#).2=a
)*.=
-2.=*a
15.'>
-
Calculul parametrilor geometrici si cinematici calitati"i
ai angrena&ului
!oz. Denumirea parametrului
geometric
Iormula de calcul "aloarea E.M.
1 Segment de intrare in
angrenare
( )
2 2
2 2 2
sin
2
da db d. t.
AC
12.)=)
[ ] mm
2 Segment de iesire din
angrenare
( )
2 2
1 1 2
sin
2
da db d. t.
C/
3>.'2
[ ] mm
3 Alunecarea relativa la capul
dintelui a
2 1
1
1 2
1 2
2
2 1
1
1
a
a
* -
a -
* -
a -
'.#*
'.)>
[ ] mm
# Alunecarea relativa la
piciorul dintelui *
2 1
1
1 2
1 2
2
2 1
1
1
*
*
a -
* -
a -
* -
-1.3=)
-'.>#*
[ ] mm
S-ar putea să vă placă și
- Angrenaj Conic Cu Dinti Drepti Desen de Executie 1Document9 paginiAngrenaj Conic Cu Dinti Drepti Desen de Executie 1Riciu RoxanaÎncă nu există evaluări
- Metode de Determinare A Randamentului La Angrenajele Cu Axe MobileDocument29 paginiMetode de Determinare A Randamentului La Angrenajele Cu Axe MobilePetrescu FlorianÎncă nu există evaluări
- PompeDocument11 paginiPompeSergiu DanielÎncă nu există evaluări
- MU RezolvateDocument7 paginiMU RezolvateattttilaÎncă nu există evaluări
- Pompa CentrifugaDocument63 paginiPompa CentrifugaMarcel PentilescuÎncă nu există evaluări
- Mecanisme-Handra Luca PDFDocument242 paginiMecanisme-Handra Luca PDFBoti Nyaguy0% (1)
- Seminar TermotehnicaDocument4 paginiSeminar TermotehnicaRoman IoanÎncă nu există evaluări
- Cama Tachet Excentric 1Document6 paginiCama Tachet Excentric 1cocoloosÎncă nu există evaluări
- L10 Lanturi Cinematice Interdependente. FiletareaDocument9 paginiL10 Lanturi Cinematice Interdependente. FiletareaVlad PaulÎncă nu există evaluări
- Cinematica Mecanismului Biela-Manivela PDFDocument3 paginiCinematica Mecanismului Biela-Manivela PDFBarsanu AlexÎncă nu există evaluări
- Fabricarea Pinionului Planetar Cojo FinishDocument60 paginiFabricarea Pinionului Planetar Cojo FinishŞerban Veronica100% (1)
- Mecanisme II ARDocument25 paginiMecanisme II ARBondoc FlorinÎncă nu există evaluări
- Tehnologii de Prelucrare Prin Deformare Plastica - ProblemeDocument3 paginiTehnologii de Prelucrare Prin Deformare Plastica - ProblemeSergiu IvanÎncă nu există evaluări
- FD Măsurarea PresiunilorDocument5 paginiFD Măsurarea PresiunilorRadu DelaAfumati100% (1)
- Curs CamaDocument42 paginiCurs CamaMarius CojocaruÎncă nu există evaluări
- TaroziiDocument5 paginiTaroziiAndrei StefanÎncă nu există evaluări
- Transmisii MecaniceDocument8 paginiTransmisii MecaniceIonut ValentinÎncă nu există evaluări
- Fisa Tehnica 2.5.2Document6 paginiFisa Tehnica 2.5.2Popa Mircea100% (1)
- Proiect Organe de Mașini Reductor Cilindro-MelcatDocument17 paginiProiect Organe de Mașini Reductor Cilindro-MelcatAdrian BiatuÎncă nu există evaluări
- Indrumar Proiect Transmisie Mecanica. UPBDocument62 paginiIndrumar Proiect Transmisie Mecanica. UPBCatalin CarabaÎncă nu există evaluări
- FRA - Pinion de AtacDocument35 paginiFRA - Pinion de AtacPetrescu DanielÎncă nu există evaluări
- DanturareDocument16 paginiDanturarecameliaioana16100% (1)
- PROIECT CapacDocument181 paginiPROIECT CapaccocalaurentiuÎncă nu există evaluări
- 1 1K62Document8 pagini1 1K62Virgil Golea100% (1)
- Mecanisme ProiectDocument21 paginiMecanisme ProiectMariusÎncă nu există evaluări
- Licență Constructii de Masini Si Management IndustrialDocument78 paginiLicență Constructii de Masini Si Management IndustrialBucur VladÎncă nu există evaluări
- Reductor Orizontal Cu o Singura TreaptaDocument35 paginiReductor Orizontal Cu o Singura TreaptaKuor3Încă nu există evaluări
- Proiect MU ExempluDocument22 paginiProiect MU ExempluPop GabrielÎncă nu există evaluări
- Laborator 2009Document74 paginiLaborator 2009b0gdanpÎncă nu există evaluări
- Proiect Masini UnelteDocument15 paginiProiect Masini UnelteOncioiu CiprianÎncă nu există evaluări
- 4 ReductorDocument36 pagini4 ReductorLena Maria FirizanÎncă nu există evaluări
- Cric Simplu ScritubDocument37 paginiCric Simplu ScritubCornel StăvăracheÎncă nu există evaluări
- Analiza Angrenaj Cu Roti DintateDocument15 paginiAnaliza Angrenaj Cu Roti DintateIustin AgapianuÎncă nu există evaluări
- Proiect - Organe de Masini II. Reductor HHDocument47 paginiProiect - Organe de Masini II. Reductor HHCostelush CostelusÎncă nu există evaluări
- Reductor OrizontalDocument35 paginiReductor OrizontalSebastian MorarÎncă nu există evaluări
- Transmisie Mecanica Cu Reductor Si Curele Trapezoidale Inguste Lucian DragosDocument60 paginiTransmisie Mecanica Cu Reductor Si Curele Trapezoidale Inguste Lucian DragosLucian Dragos100% (1)
- Proiect Transmisie MecanicaDocument40 paginiProiect Transmisie MecanicaMarius NegrilaÎncă nu există evaluări
- Reductor ArmonicDocument38 paginiReductor ArmonicIftode GabrielÎncă nu există evaluări
- Cap 2 PPDocument152 paginiCap 2 PPAlbert PetruÎncă nu există evaluări
- Organe de Mașini I PP 6Document66 paginiOrgane de Mașini I PP 6iordache andreiÎncă nu există evaluări
- Tehnologia LacatuserieiDocument127 paginiTehnologia LacatuserieiVali ErmalaiÎncă nu există evaluări
- Intrebari PDFDocument13 paginiIntrebari PDFRadu NastaseÎncă nu există evaluări
- F19 - Asamblari Prin FrecareDocument3 paginiF19 - Asamblari Prin FrecarespiceciliaÎncă nu există evaluări
- Motoare Pneumatice SpecialeDocument29 paginiMotoare Pneumatice SpecialeEmpos ComÎncă nu există evaluări
- Tehnologia de Prelucrare Cu Electrod MasivDocument11 paginiTehnologia de Prelucrare Cu Electrod MasivherleagheorgheÎncă nu există evaluări
- Proiect Organe de MasiniDocument31 paginiProiect Organe de MasiniEvelina DonisanÎncă nu există evaluări
- NSSM 1 Prelucrare Prin AschiereDocument21 paginiNSSM 1 Prelucrare Prin AschierestefpopaÎncă nu există evaluări
- Cursuri VibratiiDocument88 paginiCursuri VibratiiMc. Paranormal100% (1)
- Caiet PracticaDocument15 paginiCaiet PracticaGeorge CălinÎncă nu există evaluări
- Lucrari Laborator HidraulicaDocument85 paginiLucrari Laborator HidraulicaLASCARZAMFIRESCUÎncă nu există evaluări
- Proiect EIM Dupa PrezentareDocument128 paginiProiect EIM Dupa PrezentareIulia-Elena LupuÎncă nu există evaluări
- Proiect OM 2Document27 paginiProiect OM 2timothyÎncă nu există evaluări
- Proiect Om2Document103 paginiProiect Om2Căpăţină Marius CătălinÎncă nu există evaluări
- Masini-Unelte Curs8Document11 paginiMasini-Unelte Curs8Marius MădăraşÎncă nu există evaluări
- Proiect CompresoareDocument17 paginiProiect CompresoareMarian SadaÎncă nu există evaluări
- Roti DintateDocument26 paginiRoti DintateNita Rares CosminÎncă nu există evaluări
- Proiect Organe de Masini 2Document34 paginiProiect Organe de Masini 2Chelu CiprianÎncă nu există evaluări
- Mecanism Plan Cu Cama Rotativa Si Tachet Excentric in Miscare de Translatie.Document8 paginiMecanism Plan Cu Cama Rotativa Si Tachet Excentric in Miscare de Translatie.boxxxerÎncă nu există evaluări
- Proiect Mecanica AplicataDocument32 paginiProiect Mecanica Aplicataalik1993100% (1)
- Mers Calcul VibratiiDocument19 paginiMers Calcul VibratiiRaduMascaÎncă nu există evaluări