Cap 3 Stabilitatea SEE
Încărcat de
Adrian ConstantinCap 3 Stabilitatea SEE
Încărcat de
Adrian ConstantinCapitolul 3
STABILITATEA SISTEMELOR
ELECTROENERGETICE
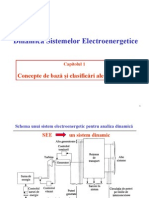
ordinul microsecundelor pn la ordinul zecilor de minute sau al orelor (v.
fig. 3.1).
Supratensiuni de trsnet
Supratensiuni de comutaie
3.1. Consideraii generale
Rezonan subsincron
n sens larg, stabilitatea unui sistem electroenergetic se definete ca
fiind proprietatea acestuia care i permite s-i menin starea de echilibru
n condiii normale de funcionare sau s ajung ntr-o nou stare de
echilibru dac este supus unor perturbaii.
Stabilitate tranzitorie i la mici perturbaii
Dinamici pe termen lung
Sistemul electroenergetic este un sistem dinamic care se poate afla fie
ntr-o stare sau punct de echilibru, fie ntr-o stare de tranziie de la un punct
de echilibru la altul. n acest context, evaluarea stabilitii vizeaz dou
aspecte majore:
(i)
stabilitatea echilibrului i comportamentul local al sistemului n
jurul unui punct de echilibru;
(ii)
stabilitatea tranziiei generat de o perturbaie sau o succesiune de
perturbaii.
Perturbaiile, n funcie de mrimea lor, care influeneaz metoda de
calcul i predicia instabilitii, pot fi clasificate n dou categorii:
Perturbaiile mici sunt acele perturbaii care permit liniarizarea
sistemului de ecuaii care modeleaz comportamentul dinamic al sistemului,
n jurul punctului iniial de funcionare. Astfel de perturbaii apar n mod
frecvent n sistemul electroenergetic, ca de exemplu, mici variaii ale
puterilor consumate sau generate.
Perturbaiile mari (puternice sau severe) sunt cele provocate de
scurtcircuitele trifazate, conectrile sau deconectrile de echipamente
(transformatoare, linii i generatoare electrice), de consumatori de mare
putere sau chiar pri ale reelei de transport. Ele nu permit liniarizarea
sistemului de ecuaii neliniare care modeleaz comportamentul dinamic al
sistemului electroenergetic.
Datorit complexitii sistemului electroenergetic, perturbaiile la care
este supus determin dinamici sau procese tranzitorii complexe care, n
funcie de natura lor, evolueaz n intervale de timp diferite mergnd de la
Controlul liniilor de interconexiune
Evoluia zilnic a sarcinii
-7
10
-6
10
-5
10
-4
10
10-3 10-2 10-1
10
102
103
104 105 106
107
Scala de timp [s]
1 sec.
1 grad
la 50 Hz
1 ciclu
1 sec. 1 minut
1 or
1 zi
Fig. 3.1. Domeniile de timp/frecven ale diferitelor fenomene dinamice
dintr-un SEE
Dei problema stabilitii SEE este o problem unic, sistemul putnd fi
stabil sau instabil, totui, n funcie de configuraia i condiiile de
funcionare la un moment dat, instabilitatea se poate manifesta n diverse
moduri.
Astfel, deoarece ntr-un SEE principalele sursele de energie sunt
generatoarele sincrone, o condiie necesar de funcionare stabil o
constituie meninerea sincronismului. Acest aspect al stabilitii, influenat
de dinamica rotorului fiecrui generator i de dependena putere activ
unghi ( P ) existent n SEE, se numete stabilitatea unghiular. Ea se
Cnd generatorul este conectat la reeaua electric nfurrile statorice
sunt parcurse de cureni alternativi avnd pulsaia egal cu cea a reelei.
Acetia produc la rndul lor un cmp magnetic nvrtitor care
interacioneaz cu cel produs de curentul de excitaie dnd natere unui
cuplu electromagnetic (Ce) care, n regim staionar, este egal cu cel mecanic
(Cm) aplicat rotorului. Pentru a se obine un cuplu constant, cele dou
cmpuri magnetice (statoric i rotoric) trebuie s se roteasc cu aceeai
vitez (s fie sincrone). La apariia unei diferene ntre Cm i Ce, viteza
rotorului, deci i a cmpului electromagnetic indus de curentul din
nfurarea de excitaie, devine diferit de viteza cmpului electromagnetic
al statorului. n barele coliviei de amortizare, precum i n fierul masiv al
rotorului (fierul masiv al rotorului poate fi considerat o nfurare
echivalent suplimentar de amortizare) se induc cureni de frecven egal
cu frecvena de alunecare (diferena dintre frecvenele celor dou cmpuri
magnetice nvrtitoare statoric i rotoric). Aceti cureni creeaz un cmp
electromagnetic, respectiv un cuplu care, conform legii lui Lenz, se opune
cauzei care l-a produs. Astfel, dac viteza rotorului devine mai mare dect
viteza de sincronism, atunci curenii indui determin creterea cuplului
electromagnetic Ce, iar rotorul se frneaz. Invers, dac viteza rotorului
scade sub viteza de sincronism, atunci curenii indui diminueaz cuplul
electromagnetic, iar rotorul se accelereaz.
definete ca fiind proprietatea sistemului electroenergetic de a menine
sincronismul ntre generatoare n condiii normale de funcionare sau n
urma unor perturbaii.
Pe de alt parte, instabilitatea unui SEE se poate produce i fr
pierderea sincronismului. De exemplu, un sistem format dintr-un generator
care alimenteaz printr-o linie electric un consumator, poate deveni
instabil datorit prbuirii tensiunii la captul receptor al liniei. n acest caz
meninerea sincronismului nu constituie o problem; problema este legat
de controlul i meninerea nivelului de tensiune i poart numele de
stabilitatea de tensiune. Ea este puternic condiionat de bilanul puterilor
reactive, respectiv de dependena ( Q U ) existent n SEE.
Un alt aspect al stabilitii SEE se refer la stabilitatea frecvenei,
adic la capacitatea sistemului electroenergetic de a menine frecvena ntrun domeniu dat ca urmare a unei perturbaii majore n funcionarea sa.
Obs: n cadrul cursului vor fi abordate doar aspecte ale stabilitii
unghiulare i, prin urmare, paragrafele urmtoare sunt dedicate acestui
subiect.
3.2. Modelarea generatoarelor sincrone
Generatoarele sincrone constituie principalele surse de energie
electric din cadrul unui sistem electroenergetic. Ele convertesc energia
mecanic furnizat de o turbin hidraulic sau cu aburi n energie electric.
Principalele pri componente ale generatorului sincron sunt (fig.3.2):
Statorul care are o form cilindric n interiorul cruia se afl
crestturi n care sunt distribuite spaial nfurrile celor 3 faze (a-a,
b-b i c-c) decalate ntre ele cu 120o electrice;
Rotorul este partea mobil care se rotete n interiorul statorului i pe
care se afl dispuse nfurarea de excitaie (alimentat de la o surs de
tensiune continu) i bare sau nfurri de amortizare. Curentul
continuu ce parcurge nfurarea de excitaie creeaz un cmp
magnetic fix fa de rotor dar care antrenat de acesta se rotete fa de
stator cu o vitez egal cu viteza rotorului. Prin urmare, n nfurrile
statorice se induc tensiuni alternative a cror frecven depinde de
viteza rotorului i numrul de perechi de poli magnetici.
Fig. 3.2. Seciune printr-un generator sincron cu o singur pereche de poli.
Modelarea generatoarelor sincrone vizeaz comportamentul acestora
att n regim normal, ct i n condiiile unor perturbaii.
J=
n regimurile perturbate, modelarea urmrete, pe de o parte micarea
rotorului sub aciunea cuplului mecanic motor dezvoltat de maina primar
de antrenare (turbina cu aburi, turbina hidraulic, turbina cu gaze etc.) i a
cuplului electromagnetic rezistent produs n generator modelul
electromecanic, iar pe de alt parte dinamica fluxurilor din nfurrile
rotorice modelul electromagnetic.
d m
2H
Sb
= C ma C ea
2
dt
0m
sau
2H
Conform legii fundamentale a mecanicii, micarea rotorului generatorului
sincron i a turbinei de antrenare sub aciunea cuplului mecanic dezvoltat de
turbin i a cuplului electromagnetic rezistent dezvoltat de generator este:
d m
= C aa = C ma C ea
dt
cuplul de accelerare, n uniti absolute (Nm);
C ma
cuplul mecanic, n uniti absolute (Nm);
C ea
t
cuplul electromagnetic, n uniti absolute (Nm);
timpul, n secunde.
(3.1)
1 J02m
[MWs/MVA]
2 Sb
C ma C ea
=
Sb
0m
(3.3)
(3.4)
n care: r este viteza unghiular a rotorului (radiani electrici / s);
0 viteza unghiular nominal a rotorului (radiani electrici / s);
p
numrul de perechi de poli ai generatorului sincron.
iar pe de alt parte:
Cma Cea Cma Cea
=
= Cm Ce Pm Pe (u.r.)
Sb
Cb
0 m
Ecuaia diferenial (3.1) poate fi normalizat i exprimat n uniti relative
(u.r.) definind constanta de inerie H ca fiind raportul dintre energia cinetic a
rotorului la viteza nominal, n MWs i puterea de baz egal cu puterea
nominal aparent a generatorului Sb=Sng , n MVA:
H=
d m
dt 0 m
innd cont c, pe de o parte:
r
m
p
=
= r
0m 0 0
p
n care: J este momentul de inerie al maselor aflate n micare (kg . m2);
m viteza unghiular a rotorului (radiani mecanici / s);
Caa
02m
i se introduce n ecuaia (3.1) se obine:
3.2.1. Modelul electromecanic al generatorului sincron.
2 HS b
(3.5)
n care: C m , C e sunt cuplurile mecanic i electric exprimate n u.r. de
cuplu;
(3.2)
Cb =
n care 0 m este viteza unghiular nominal a rotorului, n radiani
mecanici/s.
Pm , Pe
Dac se exprim momentul de inerie J din relaia (3.2):
Sb
cuplul de baz;
0 m
puterile mecanic i electric exprimate n u.r. de
putere (raportate la Sb ).
ecuaia (3.3) devine:
2H
d r
dt 0
= C a = C m C e Pm Pe
(3.6)
Dac se definete abaterea relativ a vitezei rotorice de la viteza de
sincronism:
0 r
= r
=
1
(3.7)
0
0
i se ine cont c:
d d r
=
(3.8)
dt dt 0
d
= Ca = Cm Ce Pm Pe
dt
r
(r0)t
(3.9)
2 H d 2
= Cm Ce D Pm Pe D
0 dt 2
(3.13)
(3.14)
n care D este coeficientul de amortizare (n u.r.).
Axa rotoric q
(la momentul t=0)
Se definete timpul de lansare al grupului notat cu M sau Ta , n s,
ca fiind intervalul de timp n care generatorul, pornind din repaus, ajunge la
viteza unghiular nominal (0 ) , dac i se aplic un cuplu de accelerare
egal cu cel nominal, Ca =1u.r.).
n aceste condiii, din ecuaia (3.9) rezult:
d
2H
= Ca
(3.15)
dt
Prin integrare se obine:
C
(t ) = a t + C
(3.16)
2H
n care C este constanta de integrare.
Axa sincron
(axa real)
+1
Axa rotoric d
Fig. 3.3. Definirea unghiurilor
Prin urmare:
= r t + 0 0 t = ( r 0 )t + 0
(3.12)
Obs: Atunci cnd n modelul electromagnetic nu se ine cont de
prezena nfurrilor de amortizare, efectul acestora asupra micrii
rotorului se modeleaz n ecuaia de micare prin adugarea unui termen
proporional cu variaia vitezei unghiulare . n acest caz ecuaia de
micare capt forma:
Axa rotoric q
(la momentul t)
d 2
d
= 0
2
dt
dt
d 2
d 0
= 0
=
( Cm Ce ) 0 ( Pm Pe )
2
dt 2 H
2H
dt
Se noteaz cu unghiul care determin poziia rotorului la un moment
dat (n radiani electrici) n raport cu un sistem de referin ce se rotete
sincron (cu viteza unghiular 0 ) i cu 0 valoarea acestui unghi la
momentul t=0 (fig.3.3).
+j
(3.11)
Din relaiile (3.9) i (3.12) rezult ecuaia diferenial de ordinul 2
corespunztoare modelului electromecanic, cunoscut i sub denumirea de
ecuaia de micare:
atunci ecuaia de micare (3.6) devine:
2H
0
d
= r 0 = 0 r
= 0
dt
0
(3.10)
Avnd n vedere c Ca = 1 i c la momentul t = 0 , =
n ecuaiile Park care descriu funcionarea generatorului sincron n regim
tranzitoriu se neglijeaz tensiunile electromotoare de transformare
d q
d d
= 0 i
= 0 ) i rezistena nfurrilor statorice;
(
dt
dt
r 0
= 1
0
r 0
= 0 (grupul
0
a atins viteza de sincronism, adic r = 0 ), din relaia (3.16) rezult:
(grupul este n repaus, adic r = 0 ), iar la t = Ta , =
t = 0 C = 1 i t = Ta 0 =
se
consider regimul de funcionare cvasisinusoidal, adic
d
r =
0 (aceast ipotez nu implic faptul c, n regimurile
dt
perturbate, viteza rotoric este constant, ci faptul c variaiile vitezei
rotorice
nu
influeneaz
semnificativ
ecuaiile
regimului
electromagnetic);
Ta
1
2H
Deci, timpul de lansare al grupului este:
Ta = M = 2 H [s]
(3.17)
n care H este constanta de inerie a acestuia.
ecuaiile Park n care intervin fluxuri magnetice, inductivitile proprii i
mutuale se transform n ecuaii care conin tensiuni electromotoare,
reactane i constante de timp.
n studiile viznd stabilitatea SEE ecuaia de micare - modelul
electromecanic al generatorului sincron se utilizeaz sub forma unui
sistem de dou ecuaii difereniale de ordinul I, adic:
d
M dt = Cm Ce D Pm Pe D
(3.18)
d =
0
dt
axa q
IQ
LmQ
[Link]. Modelul electromagnetic al generatorului sincron.
Regimul electromagnetic al generatoarelor sincrone este descris de
ecuaiile generale exprimate n sistemul de coordonate (d, q, 0) obinute
prin aplicarea transformatei Park asupra variabilelor reale exprimate n
coordonate fazice (tensiunile i curenii pe faz), n urmtoarele ipoteze:
Iq
Uq
Lmd
LmD
LfD
D
n axa longitudinal d se ine seama de influena nfurrii de
excitaie f, a nfurrii fictive longitudinale a statorului d i a
nfurrii de amortizare D dispus n lungul acestei axe (fig 3.4);
d
ID
Uf
n axa transversal q se ine seama de influena nfurrii fictive
transversale a statorului q i a nfurrii de amortizare Q dispus n
lungul acestei axe (fig 3.4);
If
axa d
Ud
Id
Fig. 3.4. nfurrile generatorului sincron dup aplicarea transformatei Park
n aceste condiii, se obin ecuaiile regimului permanent i ale regimului
electromagnetic tranzitoriu n sistemul de coordonate rotorice (d q) ataat
fiecrui generator. Deoarece ecuaiile reelei electrice la care este racordat
generatorul sunt exprimate n sistemul de coordonate carteziene (Re Im) sau
(+1, +j), pentru a dezvolta un model unitar este necesar s se stabileasc
relaiile de legtur ntre cele dou sisteme de coordonate. n acest sens, se
consider c unghiul rotoric este unghiul pe care axa rotoric q l face cu axa
real (figura 3.5). Se observ c sistemul de coordonate rotorice d q este
rotit cu unghiul fa de sistemul de coordonate general (Re Im) ataat
2
reelei electrice
n sistemul de coordonate rotorice d q
A = Ad + jAq = Ae
= Ae je
j ( )
2
= Ae
j ( )
2
(3.20)
Vnd n vedere relaiile (3.19) i (3.20) rezult c pentru a trece de la
sistemul de coordonate ataat reelei electrice la sistemul de coordonate rotorice
mrimea complex trebuie multiplicat cu e
A = Ae
+j (Im)
q
j ( )
2
, adic:
j ( )
2
(3.21)
Invers, pentru a trece de la sistemul de coordonate rotorice la sistemul
de coordonate ataat reelei, mrimea complex trebuie multiplicat cu
AIm
Aq
j ( )
2
j ( )
2 ,
adic:
A=
n sistemul de coordonate d-q ataat rotorului ecuaiile de funcionare ale
generatorului sincron n regim permanent, obinute din ecuaiile generale
Park prin anularea derivatelor n raport cu timpul, sunt:
Ad
/2
ARe
+1 (Re)
Fig. 3.5. Poziia sistemului de coordonate rotorice d q n raport cu sistemul
de coordonate general ataat reelei electrice Re Im.
U d = 0 q = X q I q
(3.23)
U q = 0 d = X d I d + E f
(3.24)
n care: U d i U q sunt componentele pe axele d i q ale tensiunii la
n aceste condiii, o mrime complex oarecare (tensiunea, curentul etc.)
avnd modulul A i argumentul n sistemul de coordonate ataat reelei
electrice, are argumentul n sistemul de coordonate rotorice i,
2
prin urmare, expresiile acesteia n cele dou sisteme de coordonate sunt:
n sistemul de coordonate ataat reelei elctrice
A = ARe + jAIm = Ae j
(3.22)
3.2.2. Modelul generatorului sincron n regim permanent.
j ( )
2
Ae
I d i I q
X d i X q
bornele generatorului;
componentele pe axele d i q ale curentului prin
generator;
- reactanele sincrone n axele d i q;
E f = X md I f = 0 Lmd
(3.19)
Uf
Rf
excitaie I f =
sincrone;
t.e.m.
Uf
Rf
indus
de
curentul
de
la mersul n gol al mainii
Uf
tensiunea la bornele nfurrii de excitaie;
Rf
rezistena nfurrii de excitaie.
Avnd n vedere expresia (3.28) a t.e.m. la mersul n sarcin
E = 0 + jEq = j E f ( X d X q ) I d , rezult c argumentul ei, n sistemul
de coordonate ataat reelei electrice, este unghiul rotoric (este orientat n
lungul axei q) iar modulul este Eq = E f ( X d X q ) I d . Prin urmare:
La mersul n gol I d = I q = 0 , iar din relaiile (3.23) i (3.24) rezult c
E = Eq e j = U + jX q I
U d = 0 i U q = E f i, prin urmare, Ef este orientat n lungul axei q.
n sistemul de coordonate rotorice d q se definesc mrimile complexe
U = U d + jU q i I = I d + jI q . innd seama de expresiile (3.23) i (3.24)
Pe baza relaiei (3.30) se construiete diagrama fazorial a generatorului
sincron n regim permanent simetric din figura 3.6 i se ntocmete schema
echivalent din figura 3.7.
ale componentelor U d i U q ale tensiunii la borne, rezult:
U = U d + jU q = X q I q + j X d I d + E f
(Im)
(3.25)
n membrul drept al relaiei (3.25) se adaug i se scade termenul
jX q I = jX q ( I d + jI q ) = jX q I d X q I q .
Ef
Rezult:
U = X q I q jX d I d + jE f jX q I + jX q I =
= jE f jX q I + X q I q jX d I d + jX q I d X q I q =
(3.30)
Eq
(Xd-Xq)Id
(3.26)
= j[ E f ( X d X q ) I d ] jX q I
jX qI
sau
E = U + jX q I
(3.27)
n care:
(Re)
E f Eq .
Relaia (3.27) constituie ecuaia regimului permanent al generatorului
sincron n sistemul de coordonate rotorice. Dac se multiplic fiecare
j ( )
2
e
termen al acestei ecuaii cu
se obine ecuaia regimului permanent
n sistemul de coordonate ataat reelei electrice:
E = U + jX q I
E = 0 + jEq = j E f ( X d X q ) I d
(3.28)
este t.e.m. la mersul n sarcin. Se observ c aceasta este orientat ca i
t.e.m. E f n lungul axei rotorice q. Avnd n vedere c X d X q , rezult
Fig.3.6. Diagrama fazorial a generatorului sincron n regim permanent
simetric.
(3.29)
jX q
Q = UqId Ud Iq
Avnd n vedere relaiile (3.23) i (3.24) i diagrama fazorial
rezult:
Iq = Ud X q
(3.34)
Id =
Se observ c, n regim permanent generatorul sincron se reprezint
printr-o t.e.m. n spatele reactanei sincrone X q . Dac se neglijeaz
I g ,i = S g ,i U
puterea activ
E f U q U d U q U sin i
U2
P = Ud
+
=
sin i cos i
E f U cos i +
Xd
Xq
Xd
Xq
3)
P=
EfU
se determin valoarea t.e.m. induse (tensiuni faz faz)
E f Uq
Q = U q
Xd
unghiul rotoric , adic poziia rotorului n raport cu axa de
referin (tensiunea la nodul de echilibru) ca fiind argumentul t.e.m.
E.
Xd Xq
Xd Xq
sin 2 i
(3.38)
E U
U2 U2
U
Ud d = f q q d
Xq
Xd
Xd Xq
cos 2 i sin 2 i 2
(3.39)
+
cos i
U
X
Xd
X q
d
Dac se consider cazul mainii izotrope (cu poli necai), adic
X d = X q = X s expresiile puterilor activ i rectiv devin:
Q=
Expresia puterii aparente complexe la bornele generatorului sincron
este:
*
*
j ( )
Ie 2 = U I = (U d + jU q )( I d jI q ) = P + jQ
S = U I = Ue
Din care, separnd prile real i imaginar, rezult:
P = Ud Id +UqIq
(3.32)
j ( )
2
U2
2
sau
Expresiile puterilor la borne i caracteristica static P
Xd
sin i +
puterea reactiv
E i = Eq ,i e j = U + jX q I = U i + jX q ,i I g ,i
sau
(3.36)
(3.37)
nlocuind expresiile (3.34,...,3.37) ale tensiunilor i curenilor n
relaiile (3.32) i (3.33) rezult expresiile puterilor activ i reactiv la
bornele generatorului sincron:
(3.31)
Fiind cunoscut regimul permanent de funcionare al sistemului
electroenergetic se determin regimul de funcionare al fiecrui generator
conectat ntr-un nod i al reelei electrice. Astfel, fiind cunoscute tensiunea
nodului U i i puterea complex generat S g ,i se determin:
valoare curentului prin generator (multiplicat cu
(3.35)
n care i = este defazajul dintre t.e.m. intern i tensiunea la borne i
se numete unghiul electric intern.
anizotropia rotoric, atunci X d = X q = X s , E q = E f = X md I f i
E = Eq e j = U + jX s I
E f Uq
Xd
U d = U sin( ) = U sin i
U q = U cos( ) = U cos i
Fig. 3.7. Schema echivalent n regim permanent pentru.
(3.33)
EfU
P=
EfU
Xs
sin i
(3.40)
Q=
EfU
Xs
cos i
U2
Xs
3.2.3. Modelul generatorului sincron n regim tranzitoriu.
(3.41)
n studiile viznd stabilitatea sistemelor electroenergetice pentru
reprezentarea generatoarelor sincrone se poate folosi fie un model
matematic complet care printr-un numr de circuite echivalente n cele dou
axe rotorice d i q modeleaz fenomenele subtranzitorii i tranzitorii
asociate cu dinamica fluxurilor magnetice n nfurrile de amortizare i
nfurarea de excitaie, fie un model simplificat n care se consider c
fluxul util este constant.
Modelul simplificat, cunoscut n literatura de specialitate sub
denumirea de modelul clasic, se obine din modelul generatorului sincron
cu o nfurare de amortizare n axa q adoptnd urmtoarele ipoteze
simplificatoare:
se neglijeaz dinamica fluxului din nfurrile rotorice, adic se
i.
consider c t.e.m. Eq' = U q + X d' I d i Ed' = U d X q' I q ,
Expresia (3.40) definete caracteristica static P a unui generator
sincron cu poli necai. Acesta are forma unei semisinusoide, iar puterea
maxim se obine pentru o valoare a unghiului intern i = , numit unghi
2
critic.
Dup cum se constat din expresia (3.38), caracteristica static P
a unui generator cu poli apareni se compune dintr-o component
EfU
sin i , peste care se suprapune o a doua
sinusoidal principal
Xd
component sub forma unei sinusoide de frecven dubl. Amplitudinea
celei de-a doua componente este proporional cu diferena dintre valorile
reactanelor sincrone din axele longitudinal i transversal ale
generatorului sincron i nu depinde de t.e.m. Ef a acestuia. Aceast
armonic de ordinul doi deplaseaz ntructva maximul caracteristicii de
putere a unei maini cu poli apareni, iar unghiul critic cr pentru care se
obine maximum de putere, este mai mic de 900.
Pe
Ef U
Xd
Pm ax
sini
Ef U
Pe
Xd
Pm
cr= /2
a)
n aceste condiii rezult c n sistemul de coordonate rotorice t.e.m.
complex n regim tranzitoriu este:
sini
'
E = Ed' + jEq' = U d X q' I q + j (U q + X d' I d ) = U d + jU q + jX d' ( I d + jI q )
adic:
U 2 Xd - Xq
sin2i
2 Xd Xq
Pm
ii.
0 cr
(0) /2
proporionale cu fluxurile din nfurrile de excitaie i amortizare,
sunt constante;
se neglijeaz anizotropia rotoric, adic se consider c reactanele
tranzitorii din cele dou axe rotorice sunt egale ( X d' = X q' ).
'
E = U + jX d' I
(3.42)
j ( )
2 se
Dac se multiplic fiecare termen al relaiei (3.42) cu e
obine ecuaia t.e.m. tranzitorii n sistemul de coordonate ataat reelei
electrice
b)
E ' = U + jX d' I = E 'e j '
Fig. 3.8. Caracteristicile statice P :
a) generatorul cu poli necai i b) generatorul cu poli apareni.
(3.43)
Pe baza relaiei (3.43) se se ntocmete schema echivalent din figura
3.10 i construiete diagrama fazorial a generatorului sincron n regim
tranzitoriu din figura 3.11.
jX 'd
(argumentul t.e.m. tranzitorii E ' ) poate fi utilizat n ecuaia de micare n
locul unghiului pentru a defini poziia rotorului.
E'
Rezult c, modelul clasic al generatorului sincron pentru analiza
stabilitii tranzitorii este format din ecuaiile difereniale electromecanice
puse sub forma:
Fig. 3.10. Schema echivalent a generatorului n regim tranzitoriu
(Im)
d
Pm Pe D
dt
d '
= 0
dt
jX 'qI
'
n care modulul t.e.m. E este constant pe toat durata regimului tranzitoriu.
n acest caz expresia puterii electromagnetice este:
Pe =
E 'U
sin '
'
Xd
(3.46)
i reprezint caracteristica tranzitorie P a generatorului sincron.
Ed
'
E = E 'e j = U + jX d' I
'
'
'
(3.45)
i din ecuaia fazorial (3.43):
E'q
'
(3.44)
(Re)
3.3. Stabilitatea ubghiular a generatoarelor unei centrale
electrice care debiteaz ntr-un sistem de putere infinit
3.3.1. Consideraii generale
Se consider cazul unei centrale electrice care evacueaz energie
produs ntr-un SEE, considerat de putere infinit (figura 3.12), i se
adopt urmtoarele ipoteze simplificatoare:
Fig. 3.11. Diagrama fazorial a generatorului sincron n regim tranzitoriu
Observaie: Deoarece componentele Ed' i Eq' ale fazorului E ' sunt
constante, rezult c modulul acestuia E ' =
( Ed' ) + ( Eq' )
2
(i)
centrala este reprezentat printr-un bloc generator
transformator echivalent i se neglijeaz anizotropia rotoric,
adic X d = X q i X d' = X q' ;
(ii)
se neglijeaz rezistenele i admitanele transversale din
schemele echivalente ale transformatorului bloc i liniei
electrice;
este constant
iar poziia lui fa de sistemul de coordonate rotorice (d q) nu se modific,
d d '
=
iar unghiul '
adic diferena ' = = ct. Prin urmare
dt
dt
10
(iii)
se raporteaz reactanele la tensiunea nominal a nodului de
racord la sistem;
(iv)
pentru modelarea comportamentului dinamic al generatorului
se utilizeaz modelul clasic, adic:
E g = E g e j
G
d
= ( Pm D Pe )
dt
d
= 0
dt
(7)
L
(1)
Fig. 3.12. Schema monofilar a sistemului studiat
(2)
jXe
jXL
jXg
ecuaia algebric n complex
E ' = U + jX d' I
(6)
i se noteaz cu argumentul t.e.m. E g , adic
ecuaiile difereniale
Ta
E s = U se j0 = U s
(3)
jXT
Eg
jXL
Eg
US 0
ES
n aceste condiii rezult schema echivalent din figura 3.13,a n care
generatorul este reprezentat prin tensiunea electromotoare (t.e.m.) E g din
a)
spatele reactanei X g .
Fig. 3.13. Schema echivalent (a) i schema echivalent redus (b)
Se precizeaz faptul c:
Avnd n vedere ipotezele adoptate, rezult schema echivalent redus
din figura 3.13,b, respectiv modelul algebro diferenial EAD, specific
sistemelor electroenergetice, constituit, n acest caz, din:
a) pentru calculul punctului de echilibru, n conformitate cu
modelul regimului permanent al generatorului sincron, t.e.m.
este:
E g = Eq e j = U + jX d I
(4)
d
= 0
dt
b) pentru analiza stabilitii, conform modelului clasic, t.e.m. este
'
E g = E 'e j = U + jX d' I
adic X g =
ecuaiile difereniale (1) i (2) scrise sub forma:
d 1
= ( Pm D Pe ) = f1 (, )
dt Ta
adic X g = X d = X q
X d'
b)
(5)
'
, iar unghiul nlocuiete unghiul rotoric n
ecuaia (2).
E gU s
n care X e = X g + X t +
11
= f 2 (, )
(9)
ecuaia algebric ce definete caracteristica P (static sau
dinamic, n funcie de analiza efectuat):
Pe =
Se alege tensiunea nodului de racord la sistem ca origine de faz,
adic
(8)
Xe
sin = Pemax sin
XL
.
2
(10)
Se consider c Pm = ct . n aceste condiii, punctele de echilibru sunt
definite de setul de ecuaii algebrice:
Acest model este de forma:
dx
= f ( x, y, )
dt
0 = g ( x, y, )
(11)
r 0
=0
0
(12)
Pm Pe = 0
(13)
n care: x este vectorul variabilelor dinamice de stare,
y - vectorul variabilelor algebrice de stare,
-
obinut prin anularea derivatelor n raport cu timpul n relaiile (8) i (9).
Avnd n vedere expresia (10) a puterii electromagnetice, pentru
vectorul parametrilor.
Pm < Pemax exist dou puncte de echilibru A i B (figura 3.14).
Observaii:
a) n cazul analizat, vectorul variabilelor dinamice de stare este
x = [, ] , iar vectorul parametrilor este = [ Pm , U s ] ;
b) prin nserierea reactanelor, nodurile intermediare din schema
echivalent au fost eliminate i odat cu ele s-au eliminat i
variabilele algebrice y reprezentate de modulele i
argumentele tensiunilor acestor noduri;
Pe
Pemax
A
(ii)
identificarea frecvenelor proprii de oscilaie.
B'
=0
Stabilitatea la mici perturbaii sau stabilitatea local se refer la
comportamentul sistemului electroenergetic, n jurul unui punct de
echilibru, n cazul unor perturbaii de mic amplitudine. Ea reprezint
proprietatea care permite sistemului s revin ntr-un regim de funcionare
identic sau apropiat de regimul anterior perturbaiei, dup cum aceasta este
trectoare sau permanent.
n cazul n care se neglijeaz influena sistemelor de reglare automat,
stabilitatea la mici perturbaii a unui SEE se numete stabilitatea natural i
vizeaz urmtoarele dou aspecte:
natura punctului de echilibru;
A'
3.3.2 Stabilitatea la mici perturbaii
(i)
/2
Pm=ct
Pm -Pm
=0
Fig.3.14. Punctele de echilibru
Se poate demonstra c punctul A este un punct stabil de funcionare,
iar B unul instabil. ntr-adevr, dac se consider o mic variaie a Pm a
'
puterii mecanice de la valoarea Pm = Pe la valoarea Pm = Pm Pm < Pe ,
atunci rotorul este frnat i, conform ecuaiei de micare, unghiul rotoric
scade.
Dac n starea iniial sistemul se afl n punctul A, atunci acesta se
ndreapt ctre noul punct de echilibru A i deci este stabil. n schimb,
dac n starea iniial sistemul se afl n punctul B atunci, prin scderea
unghiului rotoric acesta se ndeprteaz de noul punct de echilibru B i,
prin urmare, este instabil.
[Link]. Criteriul practic de stabilitate unghiular la mici
perturbaii
12
Re(i ) < 0 i = 1, 2,..., m
Avnd n vedere cele menionate rezult c punctele A de pe ramura
dP
din stnga a caracteristicii P , caracterizate de
> 0 , respectiv
d
< , sunt puncte stabile de funcionare, iar cele situate pe ramura din
2
dP
dreapta a caracteristicii, caracterizate de
< 0 , respectiv > , sunt
d
2
puncte instabile de funcionare. Punctul C, caracterizat de = , se
2
atunci sistemul este stabil.
Dac exist cel puin o valoare proprie care are partea real pozitiv,
atunci sistemul este instabil.
n cazul n care una sau mai multe valori proprii au partea real nul
(sunt situate pe axa imaginar) atunci nu se pot trage concluzii referitoare
la stabilitatea sistemului i se impune utilizarea altor metode de evaluare.
Pentru a analiza stabilitatea la mici perturbaii a generatoarelor
centralei electrice, se liniarizeaz ecuaii difereniale (8) i (9) n jurul
punctului de echilibru analizat, rezultnd:
numete punct critic i reprezint un punct de bifurcaie static n evoluia
dinamic a sistemului.
f
d f1
=
+ 1
dt
f
d f 2
=
+ 2
dt
Analiza calitativ efectuat anterior poate fi realizat cantitativ
folosind tehnica analizei modale, prezentat n paragraful urmtor.
[Link]. Tehnica analizei modale
d x
= A x
dt
(15 ')
n care matricea de stare A este:
n cazul unui SEE, al crui comportament dinamic este descris de
sistemul hibrid EAD, pentru formarea matricei de stare, mai nti se
liniarizeaz setul de ecuaii (11) n jurul punctului de echilibru analizat
rezultnd:
f1
D
=
a11 =
Ta
A=
f
a21 = 2 = 0 = 2f
(12)
n ipoteza c matricea D nu este singular, prin eliminarea abaterilor
variabilelor algebrice de stare y , din relaia matriceal (12) se obine
matricea de stare:
A = A ' B D 1C
(15)
sau, sub form matriceal:
Metoda general de evaluare a stabilitii locale, n jurul unui punct
de echilibru x = x 0 , a unui sistem dinamic neliniar const n formarea
matricei de stare i calculul valorilor proprii ale acesteia.
d x
dt = A ' B x
C D y
0
(14)
Valoarea Ps =
a12 =
f1
1 Pe
1 E gU S
=
=
cos
Ta
Ta X e
f
a22 = 2 = 0
Pe E gU S
=
cos se numete putere sau coeficient de
Xe
sincronizare. Prin urmare, matricea de stare este:
(13)
A = Ta
0
Stabilitatea punctului de echilibru analizat este determinat de valorile
proprii ale matricei de stare A, definit de relaia (13), astfel:
Dac valorile proprii i ale matricei de stare satisfac condiia
13
Ps
Ta
a 0
(17)
(16)
iar ecuaia caracteristic:
Ps
D
P
D
T T
2
det( A I ) = a
+ s 0 = 0
a = +
Ta
Ta
0
punct, punctul critic sau punctul de bifurcaie static C.
(18)
Cazul II D 0
n acest caz, stabilitatea sistemului depinde att de D , ct i de Ps .
Valorile proprii ale matricei de stare sunt rdcinile ecuaiei
caracteristice (18), adic:
1,2 =
D D 2 4 PsTa 0
(19)
2Ta
reprezint limita de stabilitate. Pentru aceast valoare a
2
lui cele dou puncte de echilibru A i B se unesc ntr-un singur
=
Ps > 0 , iar stabilitatea depinde valoarea lui
2
D . Astfel, dac D > 0 , atunci sistemul este stabil. ntr-adevr:
Dac <
Analiznd expresiile valorilor proprii se constat c valorile acestora
i, n mod implicit, stabilitatea sistemului depind att de coeficientul de
amortizare D, ct i de puterea de sincronizare Ps . n acest sens, se disting
urmtoarele cazuri:
partea real
-
Cazul I D = 0
n acest caz, valorile proprii sunt:
1,2 =
innd cont c Ps =
Pentru <
4 PsTa 0
E gU S
Xe
2Ta
(20)
Pentru >
D
negativ, deci sistemul este stabil;
2Ta
dac D 4 PsTa 0 > 0 , atunci rdcinile 1 i 2 ale
ecuaiei de gradul II (18) sunt reale, dar suma lor este
1 + 2 =
P
D
< 0 , iar produsul 1 2 = s 0 > 0 .
Ta
Ta
Prin urmare cele dou valori proprii sunt negative, iar
sistemul este stabil.
n schimb, dac D < 0 , atunci repetnd raionamentul
anterior, rezult c sistemul este instabil. Astfel:
cos rezult:
Ps > 0 i, conform relaiei (20), valorile
2
proprii sunt pur imaginare ceea ce corespunde unui proces
oscilatoriu neamortizat;
2
dac D 4 PsTa 0 < 0 , atunci, conform relaiei (19),
cele dou valori proprii sunt complex conjugate i au
2
dac D 4 PsTa 0 < 0 , atunci, conform relaiei (19),
cele dou valori proprii sunt complex conjugate i au
partea real
Ps < 0 i, conform relaiei (20), valorile
2
proprii sunt reale: una negativ i alta pozitiv. Prin urmare
sistemul este instabil.
dac D 4 PsTa 0 > 0 , atunci rdcinile 1 i 2 ale
ecuaiei de gradul II (18) sunt reale, dar suma lor este
1 + 2 =
14
D
pozitiv, deci sistemul este instabil;
2Ta
P
D
> 0 , iar produsul 1 2 = s 0 > 0 .
Ta
Ta
Prin urmare cele dou valori proprii sunt pozitive, iar
sistemul instabil.
Dac >
utilizarea criteriului ariilor egale la sisteme multimaini
este posibil n condiiile gruprii generatoarelor n dou
maini sincrone echivalente, situaie n care metoda a fost
denumit criteriul extins al ariilor egale.
(iii)
Ps < 0 i D 2 4 PsTa 0 > 0 . Deci rdcinile
2
1 i 2 ale ecuaiei de gradul II (18) sunt reale, dar suma lor
P
D
este 1 + 2 =
> 0 , iar produsul 1 2 = s 0 > 0 .
Ta
Ta
Pentru fundamentarea criteriului ariilor egale se consider un
generator sincron conectat printr-o reea electric pasiv la un sistem de
putere infinit (figura 3.12) i se utilizeaz modelul clasic al acestuia. n
aceste condiii, unghiul rotoric din ecuaia de micare reprezint
Prin urmare cele dou valori proprii sunt pozitive, iar sistemul
este instabil.
argumentul ' al tensiunii electromotoare E ' = E 'e j din spatele reactanei
'
'
tranzitorii X d . n plus, se admite ipoteza D = 0 . n aceste condiii ecuaia
diferenial (1) din modelul electromecanic devine:
Analiza efectuat corespunde cazului n care generatorul nu este
prevzut cu sisteme de reglare automat, iar concluziile formulate definesc
aa numita stabilitate natural. n realitate, generatoarele sunt prevzute cu
sisteme de reglare automat care influeneaz comportamentul lor dinamic.
d 1
= ( Pm Pe )
dt Ta
(21)
iar din ecuaia diferenial (2) rezult:
d 2
d 0
= 0
=
( Pm Pe ) = 0 Pa
2
dt Ta
Ta
dt
3.3.3. Stabilitatea tranzitorie
Se refer la capacitatea unui sistem electroenergetic de a menine
sincronismul ntre grupurile generatoare i de a reveni ntr-un regim de
funcionare normal n urma unei mari perturbaii. n aceste condiii nu mai
este posibil liniarizarea modelului dinamic. Pentru evaluarea stabilitii
este necesar simularea comportamentului dinamic prin integrarea
numeric a sistemului de ecuaii EAD. n acest sens, regimul tranzitoriu
este descompus ntr-o succesiune de regimuri instantanee separate prin
intervale de timp suficient de mici. Pentru a aprecia stabilitatea sistemului
se urmrete variaia n timp a unghiurilor rotorice. n practic se
utilizeaz i alte criterii mai simple de evaluare a stabilitii dintre care cel
mai cunoscut este criteriul ariilor egale.
n care Pa = Pm Pe reprezint puterea de accelerare
Dac ambele pri ale ecuaiei (22) se multiplic cu 2
cont c H =
(ii)
dou maini sincrone de puteri finite interconectate printr-o
reea electric pasiv;
Ta
, rezult:
2
d d 2
d 0
d
2 2 =2
Pa = 0 Pa
dt dt
dt Ta
H
dt
2
d 2 d d d d d d 1 d
=
=
=
dt 2 dt dt d dt dt d 2 dt
membrul stng al ecuaiei (23) devine:
Criteriul ariilor egale are la baz o metod grafo-analitic de apreciere
a stabilitii tranzitorii la prima oscilaie, aplicabil n urmtoarele cazuri:
main sincron conectat printr-o reea electric pasiv la
un sistem de putere infinit;
d
i se ine
dt
Avnd n vedere c:
[Link]. Fundamentarea criteriului
(i)
(22)
2
2
2
d d 1 d d d d
d d
=
=
dt d 2 dt dt d dt
dt dt
Prin urmare ecuaia (23) capt forma:
15
(23)
c puterea mecanic este constant ( Pm = ct.) i se exprim puterea
electromagnetic n funcie de configuraia reelei de racord la nodul de
putere infinit. Astfel, pentru schema electric din figura 3.13, expresia
puterii electromagnetice este dat de expresia caracteristicii tranzitorii
P:
0 d
d d
Pa
=
dt dt
H dt
din care, prin integrare n raport cu t, se obine:
2
0
d
Pa d
=
H
dt
Derivata
d
= r 0 = 0
dt
Pe =
reprezint viteza unghiular a
Pm , Pe
XL
.
2
Pe
Af
Pm=ct.
Aa
Fig. 3.15. Fundamentarea
criteriului ariilor egale
(Aa = Af)
m
0
Pa d = 0 ( Pm Pe ) d = 0
H
H
(24)
n care 0 este valoarea iniial a unghiului rotoric .
m
Din figura 3.15 se observ c
(25)
obinut din relaia (10) considernd Eg = E ' i X e = X d' + X T +
rotorului mainii sincrone n raport cu sistemul general de referin, care se
rotete cu viteza de sincronism 0 . n regim permanent stabil aceasta are
valoarea zero i se va modifica datorit apariiei unei perturbaii (va crete
dac perturbaia este un scurtcircuit).
Pentru ca generatorul s fie stabil la prima oscilaie este necesar ca
unghiul , care msoar poziia rotorului n raport cu axa de referin ce se
rotete cu viteza de sincronism, s nu creasc continuu n timp, adic el s
ajung la o valoare maxim m dup care s nceap s scad (fig. 3.15).
Aceast condiie este ndeplinit dac viteza unghiular d / dt redevine
zero dup un anumit interval de timp de la apariia perturbaiei, moment n
care = m . Prin urmare, criteriul de stabilitate tranzitorie capt forma:
m
E 'U S
sin
Xe
[Link]. Aplicarea criteriului ariilor egale. Timpul critic de
deconectare
0
Pa d este format din suma algebric
H
Pentru a exemplifica modul de aplicare a criteriului ariilor egale, se
consider sistemul electroenergetic din figura 3.12, format din blocul
generator transformator care echivaleaz generatoarele centralei electrice
i linia electric dublu circuit de racordare la sistemul electroenergetic
considerat de putere infinit.
a ariilor suprafeelor Aa i Af. Suprafaa Aa reprezint aria de accelerare
deoarece Pm > Pe, iar suprafaa Af aria de frnare sau decelerare pentru c,
de aceast dat Pm<Pe.
Criteriul de stabilitate tranzitorie la prima oscilaie este satisfcut
atunci cnd aria suprafaei Aa este mai mic, cel mult egal cu aria
suprafeei Af ( Aa A f ).
Se consider c la momentul t = t0 = 0 pe unul dintre circuitele liniei
electrice se produce un scurtcircuit trifazat cu punere la pmnt (fig.
3.16,a) care este eliminat prin deconectarea circuitului avariat, simultan la
ambele capete, la momentul t = td .
n practic, pentru a evalua stabilitatea la prima oscilaie a
generatorului sincron cu ajutorul criteriului ariilor egale, se adopt ipoteza
16
Puterea electromagnetic a generatorului n studiu se exprim sub
forma (25) n cele 3 etape ale regimului tranzitoriu astfel:
( X d' + X T ) X L
kX L
obinut prin aplicarea transformrii Y stelei constituit din
reactanele X Y,1 = X d' + X T , X Y,2 = X L i X Y,3 = kX L (figura
X e( av ) = X d' + X T + X L +
(i) n regimul permanent normal, anterior apariiei perturbaiei (cu
ambele circuite ale liniei n funciune):
E' U
Pe( n ) = ( n )S sin
(26)
Xe
( n)
'
n care: X e = X d + X T +
3.16,b). n cazul n care defectul se produce n imediata vecintate
a bornelor transformatorului bloc (nodul 3 din figura 3.16,b),
atunci k = 0 i, prin urmare, X eav , respectiv Pe( av ) = 0 .
Acesta este cazul cel mai defavorabil deoarece puterea de
accelerare Pa = Pm Pe = Pm este maxim.
XL
2
(1-k)L
kL
(iii) n regimul tranzitoriu dup avarie (defectul a fost eliminat prin
deconectarea circuitului avariat simultan la ambele capete):
a)
Pe( d .av ) =
3
1
jXg
jXL
E 'U S
sin
X e( d .av )
(28)
n care X e( d .av ) = X ' + X T + X L .
jXT
Prin urmare, n situaia cea mai defavorabil, expresia puterii
electromagnetice este:
Eg'
jkXL
j(1-k)XL
E' US
( n ) sin
Xe
0
Pe =
'
E U S sin
X e( d .av )
US
b)
Fig. 3.16. Schema sistemului electroenergetic pentru studiul stabilitii
tranzitorii folosind criteriului ariilor egale a) i schema echivalent de
calcul b)
(ii) Pe durata avariei/perturbaiei, cnd se produce un scurtcircuit trifazat
pe unul dintre circuitele liniei electrice la o distan k L fa de
bornele de nalt tensiune ale transformatorului bloc (fig. 3.16,b):
E' U
Pe( av ) = ( avS) sin
Xe
pentru t < t0 = 0
pentru 0 t < td
(29)
pentru t td
Pe baza relaiei (29) se traseaz caracteristicile tranzitorii P
(putere unghi) corespunztoare celor trei etape ale regimului tranzitoriu
prezentate n figura 3.17.
nainte de apariia defectului, cnd ambele circuite ale liniei electrice sunt
n funciune, punctul de funcionare a se afl la intersecia dintre caracteristica
curba Pe( n ) () i dreapta corespunztoare puterii mecanice Pm = ct. i i
(27)
corespunde unghiul rotoric 0 . La apariia scurtcircuitului trifazat, punctul de
funcionare trece brusc n punctul b de pe caracteristica tranzitorie de avarie
pentru c, datorit ineriei, unghiul nu se poate modifica brusc. Deoarece n
n care reactana X e( av ) se determin cu relaia
17
acest punct Pm > Pe = 0 rotorul generatorului se accelereaz i unghiul
unghiului cresctor, acceleraia devine din nou pozitiv deoarece Pm > Pe( d .av ) i
sincronismul este pierdut.
Criteriul ariilor egale este de fapt o metod de determinare a
oscilaiilor maxime ale unghiului rotoric i, prin urmare, el poate fi folosit
pentru evaluarea stabilitii tranzitorii a sistemului fr a analiza evoluia
curbei (t ) , care se poate obine din integrarea ecuaiei de micare.
rotoric crete, pn la valoarea d corespunztoare momentului de timp td
cnd se deconecteaz circuitul avariat al liniei electrice.
n acest moment, punctul de funcionare c se mut brusc n punctul d
situat pe caracteristica post-avarie Pe( d .av ) () . Avnd n vedere c n acest punct
Pm < Pe( d .av ) , ncepe un proces de frnare. Totui, datorit ineriei, unghiul
rotoric continu s creasc pn cnd ntreaga energie cinetic acumulat n
perioada de accelerare, reprezentat de aria suprafeei Aa , este disipat
Dac m este valoarea maxim pn la care poate crete unghiul
rotoric fr a se pierde sincronismul (valoarea unghiului rotoric
corespunztoare punctului f de pe caracteristica Pe( d .av ) () ), atunci ariile
celor dou suprafee Aa i Af se calculeaz cu urmtoarele relaii:
(transferat sistemului), adic pn cnd aria suprafeei Af devine egal cu Aa
iar viteza relativ a rotorului devine nul (punctul e n figura 3.17). n punctul e
unghiul rotoric a atins valoarea maxim i n continuare va ncepe s scad,
ceea ce semnific c este ndeplinit condiia de stabilitate tranzitorie. n
absena oricrei amortizri rotorul va continua s oscileze n jurul unghiului
Aa =
Af =
corespunztor noului punct de echilibru stabil post-avarie (punctul g din
figura 3.17).
(n)
Pe
f
Aa
Pm=ct.
([Link])
Pe
b
0
[Link]
0
0 )
(30)
Pe( d .av ) Pm d =
E 'U S
( d .av ) sin Pm d =
Xe
(31)
Avnd n vedere expresiile (30) i (31) rezult:
P(eav)
n acest caz, egalitatea ariilor de accelerare i frnare corespunde
limitei de stabilitate a sistemului pentru perturbaia considerat. Valoarea
corespunztoare a unghiului rotoric se numete unghi critic ( crit ) i se
obine prin rezolvarea ecuaiei:
Aa = A f
(32)
Af
E 'U
= ( d .avS ) ( cos d cos m ) Pm ( m d )
Xe
Af
P d = P (
Pm Pe
0d .av
Pm Pe( av ) d =
Pm ( d 0 ) =
E 'U S
( cos d cos m ) Pm ( m d )
X e( d .av )
(33)
respectiv valoarea unghiului crit
Fig. 3.17. Caracteristicile tranzitorii P pentru generatorul sincron
conectat la un sistem de putere infinit
P X d .av
d = crit = arccos ( m 0 ) m ' e + cos m
E US
Dac pn n punctul f nu s-a ajuns la egalitatea ariilor celor dou suprafee,
punctul de funcionare va continua s se deplaseze pe curba Pe( d .av ) n sensul
Timpul critic de deconectare
18
(34)
Fiind cunoscut valoarea unghiului critic crit , se poate determina
timpul de deconectare corespunztor acestui unghi, numit timpul critic de
eliminare a defectului tcrit , rezolvnd ecuaia (t ) = crit . n acest sens, mai
nti se determin (t ) prin integrarea ecuaiei de micare.
Avnd n vedere c n perioada de defect Pe( av ) = 0 , conform relaiei
(22) avem:
d 2 0
( Pm Pe ) = 0 Pm
=
2
Ta
Ta
dt
(35)
Soluia ecuaiei difereniale (35) este:
t2
(36)
(t ) = 0 Pm + C1t + C2
2
Ta
Constantele de integrare C1 i C2 se determin din condiiile iniiale.
d
Astfel, innd cont c:
= 0 t =0 = 0 i t = 0 = 0 rezult C1 = 0,
dt t =0
respectiv C2 = 0 .
0
t2
Pm + 0 . Impunnd condiia (t ) = crit se obine
2
Ta
valoarea timpului critic de deconectare a liniei avariate:
Deci (t ) =
tcrit =
2Ta
( crit 0 )
0 Pm
(37)
19
S-ar putea să vă placă și
- Sisteme Electroenergetice - IsE - Suport de Curs - Capitolul 3 Stabilitatea UnghiularaÎncă nu există evaluăriSisteme Electroenergetice - IsE - Suport de Curs - Capitolul 3 Stabilitatea Unghiulara71 pagini
- Stabilitatea Functionarii Sistemelor ElectroenergeticeÎncă nu există evaluăriStabilitatea Functionarii Sistemelor Electroenergetice20 pagini
- REFERAT Stabilitatea Sistemelor Electroenergetice100% (1)REFERAT Stabilitatea Sistemelor Electroenergetice20 pagini
- Calculul Puterilor Active Si Reactive Ale Generatorului Sincron Cu Poli InnecatiÎncă nu există evaluăriCalculul Puterilor Active Si Reactive Ale Generatorului Sincron Cu Poli Innecati32 pagini
- Generatorul Electric de Curent ContinuuÎncă nu există evaluăriGeneratorul Electric de Curent Continuu5 pagini
- Ionela Marginean - Model Atestat TehniceÎncă nu există evaluăriIonela Marginean - Model Atestat Tehnice20 pagini
- Etapa II - 1 Stabilitatea Unghiulara Modele SimplificateÎncă nu există evaluăriEtapa II - 1 Stabilitatea Unghiulara Modele Simplificate16 pagini
- Suport Curs - Masini Electrice SincroneÎncă nu există evaluăriSuport Curs - Masini Electrice Sincrone27 pagini
- Puterea de Ieșire A Alternatorului Și Funcționarea În Paralel A Două AlternatoareÎncă nu există evaluăriPuterea de Ieșire A Alternatorului Și Funcționarea În Paralel A Două Alternatoare7 pagini
- E Cos I X Sin I X U Sin I X Cos I X E U: 18.1.6. Caracteristicile Generatorului SincronÎncă nu există evaluăriE Cos I X Sin I X U Sin I X Cos I X E U: 18.1.6. Caracteristicile Generatorului Sincron6 pagini
- Actionari Electrice Cu Masini SincroneÎncă nu există evaluăriActionari Electrice Cu Masini Sincrone10 pagini
- Reglarea Automată A Frecvenţei Şi Puterii Active În Sistemele ElectroenergeticeÎncă nu există evaluăriReglarea Automată A Frecvenţei Şi Puterii Active În Sistemele Electroenergetice22 pagini
- Folosirea Energiei Electrice in Action Area UtilajelorÎncă nu există evaluăriFolosirea Energiei Electrice in Action Area Utilajelor20 pagini
- T2 Curs 6: Comanda Sistemelor de Propulsie Electrică NavalăÎncă nu există evaluăriT2 Curs 6: Comanda Sistemelor de Propulsie Electrică Navală75 pagini
- Aplicația Nr. 4 - Identificarea Elementelor Componente Ale Mașinii Sincrone Și Ale Mărimilor Nominale. Conectarea Generatorului Sincron La ReţeaÎncă nu există evaluăriAplicația Nr. 4 - Identificarea Elementelor Componente Ale Mașinii Sincrone Și Ale Mărimilor Nominale. Conectarea Generatorului Sincron La Reţea6 pagini
- Motor Sincron Analizagr.141,142,143, Nov.2015Încă nu există evaluăriMotor Sincron Analizagr.141,142,143, Nov.201517 pagini
- 4 - Calculul Regimului Permanent Seidel-Gauss Si Newton-RaphsonÎncă nu există evaluări4 - Calculul Regimului Permanent Seidel-Gauss Si Newton-Raphson30 pagini
- Conectarea Corecta A Aparatelor Electrice de Masura Trifazate100% (10)Conectarea Corecta A Aparatelor Electrice de Masura Trifazate69 pagini