Documente Academic
Documente Profesional
Documente Cultură
Proiectarea Generala Si Functionala A Unui Schimbator de Viteze in Trepte Pentru Un Automobil
Încărcat de
dan_4_stoneTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Proiectarea Generala Si Functionala A Unui Schimbator de Viteze in Trepte Pentru Un Automobil
Încărcat de
dan_4_stoneDrepturi de autor:
Formate disponibile
1
Tema de proiect:
S se efectueze proiectarea general i funcional a unui schimbtor de
viteze n trepte pentru un automobil cu urmtoarele caracteristici:
tipul automobilului : autocamion
caroseria : deschisa
numr de persoane(locuri) : 3
masa util maxim : 14000 kg
viteza maxim atins : 90 km/h
puterea maxim : P
max
= 327,33 [kW] la 2100 [rpm];
momentul maxim : M
max
=1920,28 [Nm] la 1050 [rpm];
i
0
= 4,22
i
1
= 8,57
i
sn
= 1,01
alte particularitai : MAC 6x4 (punti motoare spate)
2
CUPRINS
Capitolul 1 Etajarea schimbtorului de viteze. Trasarea diagramei fierstru. .............................. 4
1.1 Etajarea schimbtorului de viteze. .................................................................................... 4
1.2 Trasarea diagramei fierstru ........................................................................................... 6
Capitolul 2 Determinarea performaelor de traciune .................................................................... 7
2.1 Caracteristica de traciune ..................................................................................................... 7
2.2 Caracteristica dinamic ......................................................................................................... 9
2.3 Caracteristica acceleraiilor ................................................................................................. 11
Capitolul 4 Stabilirea schemei de organizare a SV i determinarea numrului de dini pentru
roile dinate. .................................................................................................................................. 25
4.1 Stabilirea schemei de organizare generala a SV ................................................................. 25
4.2 Determinarea distanei dintre axele arborilor i a modulului normal al danturii ................ 26
4.3 Determinarea numrului de dini pentru roile dinate ........................................................ 28
4.4 Calculul rapoartelor de transmitere finale i trasarea diagramei fierstru reale ................ 29
Capitolul 5 Calculul i proiectarea mecanismului reductor ......................................................... 31
5.1 Alegerea materialelor pentru roile dinate .......................................................................... 31
5.2 Determinarea elementelor dimensionale principale ale angrenajului ................................. 31
5.3 Forele din angrenaje ...................................................................................................... 36
5.4 Verificarea danturii ......................................................................................................... 36
5.4.1 Verificarea la oboseal prin ncovoierea dintelui ......................................................... 36
5.4.2 Verificarea la presiune de contact ........................................................................... 37
5.4.3 Verificarea la durabilitate a angrenajelor ................................................................ 38
5.5 Proiectarea arborilor si a organelor de rezemare ............................................................ 39
5.5.1 Predimensionarea arborilor i alegerea capetelor de arbori .................................... 39
5.5.2 Alegerea rulmenilor stabilirea preliminar a formei constructive a arborilor ........ 39
5.5.3 Verificarea canelurilor arborelui primar ................................................................. 40
5.5.4 Verificarea arborilor ................................................................................................ 41
5.5.4.1 Verificarea la solicitare compusa ........................................................................ 42
5.5.4.2 Calculul coeficientului de siguran global ......................................................... 43
Capitolul 6 Studiul soluilor constructive posibile pentru puntea fa .......................................... 44
Capitolul 7 Studiul soluilor constructive posibile pentru suspensia punii fa ........................... 51
Capitolul 8 Calculul punii fa a autocamionului ........................................................................ 57
8.1 Calculul grinzii punii din fa ........................................................................................ 58
8.2 Calculul fuzetei ............................................................................................................... 63
3
8.3 Calculul pivotului fuzetei ............................................................................................... 65
Capitolul 9 Calculul i proiectarea suspensiei punii fa ............................................................. 68
9.1 Calculul arcurilor cu foi ...................................................................................................... 68
9.2 Calculul elementelor de amortizare ale suspensiei ............................................................. 69
Bibliografie .................................................................................................................................... 76
4
Capitolul 1 Etajarea schimbtorului de viteze. Trasarea diagramei
fierstru.
1.1 Etajarea schimbtorului de viteze.
Schimbtorul de vitez cu trepte este caracterizat din punct de vedere cinematic, prin
numrul de trepte (etaje) i rapoartele de trasmitere. Raportul de transmitere maxim, stabilit n
corcondran cu cele artate anterior, reprezint raportul de transmitere al primei trepte,
1 s
i .
Raportul de transmitere la care se realizeaz viteza maximp impus n tema de proiectare,
sn
i ,
este stabilit odat cu predeterminarea i definitivarea raportului de transmisie al transmisiei
principale. El corespunde fie ultimei trepte, fie penultimei trepte, atunci cnd exist treapt de
supravitez (economic).
Ansambll operaiilor de stabilire a numrului de trepte i a valorilor rapoartelor de
transmitere ale schimbtorului de vitez se numete etajarea schimbtorului de vitez.
Etajarea schimbtorului de vitez se va face dup criteriul aceluiai interval de turaii ale
motorului n fiecare treapt.
Numrul minim de trepte se determin cu relaia:
|
.
|
\
|
'
' '
|
|
.
|
\
|
+ =
n
n
i
i
N
sn
s
ln
ln
1
1
min
(1.1)
Prin urmare pentru acelai interval de turaii n fiecare treapt, avem:
.
1
const
n
n
i
i
sj
sj
=
'
' '
=
, N j ... 3 , 2 , 1 = (1.2)
Relaia precedent arat c rapoartele de transmitere sunt n progresie geometric avand raia:
n
n
r
G
'
' '
= (1.3)
Numit i raie de etajare.
Pentru o treapt dat j exist relaia:
V i
i
i
n
sj
sj
=
0
6525 , 2 (1.4)
Termenul general al progresiei geometrice pentru rapoartele de transmitere va fi:
1
1
=
j
G s sj
r i i , N j ... 3 , 2 , 1 = (1.5)
Pentru N j = raportul de transmitere este cunoscut:
sn
i . innd cont de acesta, din (1.5) se
obine:
1
1
= N
s
sn
G
i
i
r (1.6)
Substituind pe
G
r n relaia precedent (1.6) se va obine:
1
1
1
=
N
j N
s
j
sn sj
i i i , N j ... 3 , 2 , 1 = (1.7)
5
Tab 1.1 Intervalele extreme de vitez pentru fiecare treapt din schimbtor
Treapta i
s
v
min
v
max
1 8,57 5,53 12,11
2 4,19 12,11 26,52
3 2,05 26,52 58,10
4 1,00 58,10 127,26
Tabel 1.2 Vitezele autovehiculului pentru fiecare treapt de vitez,la diferite turaii
n [min
-1
] V
I
[km/h] V
II
[km/h] V
III
[km/h] V
IV
[km/h]
1050 5,53 11,31 23,15 47,37
1100 5,79 11,85 24,25 49,63
1150 6,05 12,39 25,35 51,88
1200 6,32 12,93 26,46 54,14
1250 6,58 13,47 27,56 56,39
1300 6,84 14,00 28,66 58,65
1350 7,11 14,54 29,76 60,91
1400 7,37 15,08 30,86 63,16
1450 7,63 15,62 31,97 65,42
1500 7,90 16,16 33,07 67,67
1550 8,16 16,70 34,17 69,93
1600 8,42 17,24 35,27 72,18
1650 8,69 17,78 36,38 74,44
1700 8,95 18,31 37,48 76,70
1750 9,21 18,85 38,58 78,95
1800 9,48 19,39 39,68 81,21
1850 9,74 19,93 40,78 83,46
1900 10,00 20,47 41,89 85,72
1950 10,27 21,01 42,99 87,97
2000 10,53 21,55 44,09 90,23
2050 10,79 22,08 45,19 92,49
2100 11,06 22,62 46,30 94,74
2150 11,32 23,16 47,40 97,00
2200 11,58 23,70 48,50 99,25
2250 11,84 24,24 49,60 101,51
2300 12,11 24,78 50,71 103,76
6
1.2 Trasarea diagramei fierstru
Fig 1.1 Diagrama fierstru pentru etajarea n progresie geometric
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
110.00
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600
V [Km/h]
n [rot/min]
Diagrama fierstru
treapta I
treapta II
treapta III
treapta IV
7
Capitolul 2 Determinarea performaelor de traciune
2.1 Caracteristica de traciune
Pentru trasarea caracteristicii de traciune trebuie s se determine fora de traciune
generat de autovehicul n fiecare treapt a schimbtorului de viteze.Pentru aceasta se utilizeaz
formula:
()
(2.1)
Unde : i
sk
- valoarea raportului de transmitere al schimbtorului de viteze n treapta k
i
0
- raportul de transmitere al transmisiei principale
t - randamentul transmisiei
( ) momentul motor care depinde de sarcin i turaie
Pe de alt parte, viteza autovehiculului se poate exprima n fucie de turaia motorului i
rapoartele de transmitere i
sk
i i
0
.
V=0,377
(2.2)
Pentru studiul performaelor maxime de traciune, trebuie analizat variaia forei de
traciune n funcie de vitez, atunci cnd motorul funcioneaz la sarcin total, iar schimbtorul
de viteze este cuplat succesiv n toate treptele.
Fora de traciune este direct proporional cu momentul M
e
, forma curbei sale de variaie
este similar cu cea a momentului motor.
[(
) (
) (
) (
) (
] (2.3)
unde:
(2.4)
M
e max
= 220 Nm (momentul maxim)
c
a
=1,2 (coeficientul de adaptabilitate al motorului)
M
p
=183,33 Nm
(2.5)
n
M
= 1700 rpm
c
e
=0,46 (coeficientul de elasticitate al motorului)
n
P
= 3695 rpm
Valorile forei de traciune n funcie de viteza obinut n fiecare treapt a schimbtorului
de viteze sunt prezentate n tabelul 2.1
Caracteristica de traciune pentru fiecare treapt a schimbtorului de viteze este
prezentat n figura 2.1
8
Tabel 2.1 Valorile vitezei si forei de traciune n funcie de treapta schimbtorului de viteze
n
Treapta I Treapta II Treapta III Treapta IV
v Ft v Ft v Ft v Ft
850 4,47 11909,70 9,15 5822,83 18,71 2848,88 38,35 1389,70
900 4,74 11952,54 9,69 5843,78 19,81 2859,13 40,60 1394,70
950 5,00 11983,15 10,23 5858,74 20,91 2866,45 42,86 1398,27
1000 5,26 12001,51 10,77 5867,72 22,01 2870,84 45,11 1400,41
1050 5,53 12007,63 11,31 5870,71 23,11 2872,30 47,37 1401,12
1100 5,79 12001,51 11,84 5867,72 24,21 2870,84 49,63 1400,41
1150 6,05 11983,15 12,38 5858,74 25,31 2866,45 51,88 1398,27
1200 6,32 11952,54 12,92 5843,78 26,41 2859,13 54,14 1394,70
1250 6,58 11909,70 13,46 5822,83 27,51 2848,88 56,39 1389,70
1300 6,84 11854,61 14,00 5795,89 28,61 2835,70 58,65 1383,27
1350 7,11 11787,28 14,54 5762,97 29,71 2819,59 60,91 1375,41
1400 7,37 11707,70 15,07 5724,07 30,81 2800,56 63,16 1366,13
1450 7,63 11615,89 15,61 5679,18 31,91 2778,60 65,42 1355,41
1500 7,90 11511,83 16,15 5628,30 33,01 2753,70 67,67 1343,27
1550 8,16 11395,53 16,69 5571,44 34,11 2725,88 69,93 1329,70
1600 8,42 11266,98 17,23 5508,60 35,21 2695,14 72,18 1314,70
1650 8,69 10943,83 17,77 5350,60 36,31 2617,84 74,44 1276,99
1700 8,95 10797,56 18,30 5279,09 37,41 2582,85 76,70 1259,93
1750 9,21 10642,43 18,84 5203,24 38,51 2545,74 78,95 1241,82
1800 9,48 10478,42 19,38 5123,06 39,61 2506,51 81,21 1222,69
1850 9,74 10305,56 19,92 5038,54 40,71 2465,16 83,46 1202,52
1900 10,00 10123,82 20,46 4949,69 41,81 2421,68 85,72 1181,31
1950 10,27 9933,23 21,00 4856,50 42,91 2376,09 87,97 1159,07
2000 10,53 9733,76 21,53 4758,98 44,01 2328,38 90,23 1135,80
2050 10,79 9525,44 22,07 4657,13 45,11 2278,55 92,49 1111,49
2100 11,06 9308,24 22,61 4550,94 46,22 2226,59 94,74 1086,14
2150 11,32 9082,19 23,15 4440,42 47,32 2172,52 97,00 1059,77
2200 11,58 8847,26 23,69 4325,56 48,42 2116,32 99,25 1032,35
2250 11,84 8603,48 24,23 4206,37 49,52 2058,01 101,51 1003,91
2300 12,11 8350,82 24,76 4082,84 50,62 1997,57 103,76 974,43
9
Figura 2.1 Caracteristica de traciune
2.2 Caracteristica dinamic
Performaele de traciune ale unui autovehicul depind nu numai de caracteristica de
traciune ci i de greutatea sa i de factorul dinamic (K=kA).Pentru a ngloba toate cele trei
elemente de influen, este necesar utilizarea unui parametru special dedicat:factorul dinamic.
(2.6)
Deoarece fora de traciune este dependent de vitez i de treapta n care este cuplat
schimbtorul de viteze, rezult c i factorul dinamic depinde de aceti factori.Caracteristica
dinamic reprezint funcia care exprim dependena factorului dinamic de viteza
autovehiculului pentru toate treptele schimbtorului de viteze atunci cnd motorul funcioneaz
la sarcin total.Valorile factorului dinamic n funcie de viteza automobilului si treapta SV sunt
prezentate n tabelul 2.2.
Tabel 2.2 Valorile factorului dinamic
Treapta I Treapta II Treapta III Treapta IV
v D v D v D v D
4,47 0,46 9,15 0,22 18,71 0,11 38,35 0,05
4,74 0,46 9,69 0,22 19,81 0,11 40,60 0,05
5,00 0,46 10,23 0,23 20,91 0,11 42,86 0,05
5,26 0,46 10,77 0,23 22,01 0,11 45,11 0,05
5,53 0,46 11,31 0,23 23,11 0,11 47,37 0,05
5,79 0,46 11,84 0,23 24,21 0,11 49,63 0,05
6,05 0,46 12,38 0,23 25,31 0,11 51,88 0,05
6,32 0,46 12,92 0,22 26,41 0,11 54,14 0,05
6,58 0,46 13,46 0,22 27,51 0,11 56,39 0,05
6,84 0,46 14,00 0,22 28,61 0,11 58,65 0,05
7,11 0,45 14,54 0,22 29,71 0,11 60,91 0,05
7,37 0,45 15,07 0,22 30,81 0,11 63,16 0,05
7,63 0,45 15,61 0,22 31,91 0,11 65,42 0,05
0.00
2000.00
4000.00
6000.00
8000.00
10000.00
12000.00
14000.00
0.00 20.00 40.00 60.00 80.00
F
t
[daN]
V [km/h]
Caracteristica de traciune
Treapta I
Treapta II
Treapta III
Treapta IV
10
7,90 0,44 16,15 0,22 33,01 0,10 67,67 0,05
8,16 0,44 16,69 0,21 34,11 0,10 69,93 0,05
8,42 0,43 17,23 0,21 35,21 0,10 72,18 0,04
8,69 0,42 17,77 0,21 36,31 0,10 74,44 0,04
8,95 0,42 18,30 0,20 37,41 0,10 76,70 0,04
9,21 0,41 18,84 0,20 38,51 0,10 78,95 0,04
9,48 0,40 19,38 0,20 39,61 0,09 81,21 0,04
9,74 0,40 19,92 0,19 40,71 0,09 83,46 0,04
10,00 0,39 20,46 0,19 41,81 0,09 85,72 0,04
10,27 0,38 21,00 0,19 42,91 0,09 87,97 0,04
10,53 0,37 21,53 0,18 44,01 0,09 90,23 0,03
10,79 0,37 22,07 0,18 45,11 0,09 92,49 0,03
11,06 0,36 22,61 0,17 46,22 0,08 94,74 0,03
11,32 0,35 23,15 0,17 47,32 0,08 97,00 0,03
11,58 0,34 23,69 0,17 48,42 0,08 99,25 0,03
11,84 0,33 24,23 0,16 49,52 0,08 101,51 0,03
12,11 0,32 24,76 0,16 50,62 0,07 103,76 0,02
Figura 2.2 Caracteristica dinamic
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
0.00 20.00 40.00 60.00 80.00
D
[daN]
V [km/h]
Caracteristica dinamic
Treapta I
Treapta II
Treapta III
Treapta IV
11
2.3 Caracteristica acceleraiilor
Caracterisitca acceleraiilor reprezintfuncia, respectiv reprezentarea grafic a acesteia,
care prezint dependena acceleraiei autovehiculului fa de viteza de deplasare pentru toate
treptele schimbtorului de viteze, cnd motorul funcioneaz la sarcina total.
(2.7)
( ) *
+ (2.8)
unde: coeficientul de influen a maselor n miscare de rotaie
factorul dinamic
coeficientul de rezisten al drumului
Valorile coeficienilor de influen a maselor n miscare de rotaie i cele ale momentelor
de inerie masice depind de cilindreea i numrul de cilindri ai motorului, de tipul i
caracteristicile constructive ale transmisiei, n primul rnd ale schimbtorului de viteze, de tipul
i dimensiunile pneurilor.
n lipsa datelor concrete, mrimile respective se pot aproxima astfel:
(2.9)
unde:
este coeficientul de influen a maselor n miscare de rotaie din schimbtor n treapta k
raportul de transmitere al schimbtorului n treapta k a SV
raportul de transmitere al transmisiei principale
n tabelul 2.3 sunt prezentate valorile coeficientului de influen a maselor n micare de
rotaie, pentru fiecare treapt a SV.
Tabel 2.3 Valorile coeficientului de influen a maselor n micare de rotaie
Treapta 1 2 3 4
i
s
8,57 4,19 2,05 1
k
1,130 1,084 1,062 1,051
=fcos
p
+sin
p
(2.10)
Conseiderm c autovehiculul se deplaseaz n palier, astfel unghiul de nclinare al pantei
este nul(
p
=0)
=0,018
n tabelul 2.4 sunt prezentate valorile acceleraiilor pentru fiecare treapt a SV.
Tabel 2.4 Valorile acceleraiilor
Treapta I Treapta II Treapta III Treapta IV
V
1
[km/h]
a
1
[m/s
2
]
V
2
[km/h]
a
2
[m/s
2
]
V
3
[km/h]
a
3
[m/s
2
]
V
4
[km/h]
a
4
[m/s
2
]
8,02 3,47 11,35 2,42 16,04 1,67 32,08 0,75
10,02 3,46 14,19 2,42 20,05 1,67 40,10 0,74
12,03 3,45 17,03 2,40 24,06 1,66 48,12 0,73
14,03 3,42 19,87 2,38 28,07 1,64 56,14 0,72
16,04 3,38 22,71 2,35 32,08 1,62 64,16 0,70
18,04 3,33 25,55 2,32 36,09 1,59 72,18 0,67
20,05 3,28 28,39 2,28 40,10 1,56 80,20 0,65
22,05 3,21 31,22 2,23 44,11 1,53 88,22 0,62
24,06 3,13 34,06 2,17 48,12 1,48 96,24 0,58
26,06 3,05 36,90 2,11 52,13 1,44 104,26 0,55
12
28,07 2,95 39,74 2,04 56,14 1,38 112,28 0,51
30,07 2,84 42,58 1,96 60,15 1,33 120,30 0,46
32,08 2,73 45,42 1,88 64,16 1,26 128,32 0,41
34,08 2,60 48,26 1,79 68,17 1,20 136,34 0,36
36,09 2,47 51,09 1,69 72,18 1,12 144,36 0,30
38,09 2,32 53,93 1,59 76,19 1,04 152,38 0,25
40,10 2,17 56,77 1,47 80,20 0,96 160,39 0,18
n figura 2.3 este prezentat caracteristice de acelerare pentru toate cele 5 trepte ale
schimbtorului de viteze.
Figura 2.3 Caracteristica de accelerare
0
0.5
1
1.5
2
2.5
3
3.5
4
0 10 20 30 40 50 60 70 80 90
a
[m/s
2
]
V [km/h]
Caracteristica acceleraiilor
Treapta I
Treapta II
Treapta III
Treapta IV
13
Capitolul 3 Studiul soluiilor constructive posibile pentru schimbtorul de
viteze i alegerea justificat a unei soluii pentru autovehiculul ce se
proiecteaz
3.1 Soluii constructive pentru autocamioane. Prezentare general.
La autocamioane se folosesc schimbtoare de vitez la care cuplarea treptelor se
realizeaz fie prin sincronizatoare i/sau mufe de cuplare, eventual cu roi plimbtoare, fie cu
ambreiaje multidisc. n primul caz, schimbtoarele de vitez au trei arbori i realizeaz treapta de
priz direct. De asemenea, mai pot fi i variante cu doi sau trei arbori intermediari.
Prima variantp este similar cu cea de la autoturisme. Pentru mersul napoi se adaug un arbore
suplimentar cu dou roi sau o singur roat, plasarea lor facndu-se astfel nct s se asigure
compactitate maxim i solicitri mecanice reduse.
La valori mari ale momentului maxim al motorului distana dintre axele arborilor
schimbtorului de viteze crete mult, ceea ce conduce la dimensiuni mari de gabarit, mas mare,
viteze periferice mari ale roilor dinate i momente mari de inerie ale acestora. Ca urmare, se
mresc solicitrile dinamice i zgomotul n funcionare, iar schimbarea treptelor devine dificil.
Pentru nlturarea acestor dezavantaje se folosesc doi sau trei arbori intermediari antrenai
simultan de ctre arborele primar.
Cnd se folosesc trei arbori intermediari axele lor sunt plasate n spaiu simetric,
interseciile lor cu un plan transversal reprezentnd un triunghi echilateral. Exist propuneri
pentru schimbtoare cu ambreiaj dublu care poate realiza 12 trepte pentru mersul inainte.
Pentru a realiza valori sczute ale saltului de etajare trebuie s se mreasc numrul de trepte,
care poate ajunge chiar la 20. n acest scop se folosete un schimbtor de viteze propriu-zis,
numit schimbtor de viteze principal, i unul sau doua reductoare nseriate cu acesta.
Posibilitiile de cuplare ale acestor elemente sunt artate in figura 3.1 .
Fig. 3.1 Psibilitile de combinare a schimbtorului de vitez principal cu reductorul(reductoarele)
Reductorul montat n faa schimbtorului de vitez principal se mai numete i reductor
divizor, iar cel montat n spate se mai numete i reductor multiplicator.
De regul, reductorul divizor realizeaz dou trepte: treapta de priz direct i treapta cu raport
de transmitere supraunitar. La reductor multiplicator raportul de transmitere al acestuia n prima
treapt este mare, iar schimbtorul de vitez principal are saltul de etajare mic i diapazonul de
rapoarte de transmitere relativ mic. n general, diapazonul total de rapoarte la un astfel de
schimbtor de vitez poate ajunge pn la 13-14.Uneori, la aceast variant, daca schimbtorul
principal de vitez are 5 trepte nu se formeaz 10 trepte, ci numai 9.
Reductoarele pot fi executate din subansambluri distincte i montate la schimbtorul de viteze
principal. Acesta din urm poate fi utilizat i singur pe autovehicul. n acest mod se obine o
raionalizare a prduciei de subansambluri. Totui se constat tendina de a realiza schimbtoare
de viteze cu multe trepte, care ncorporeaz n construcia lor i reductorul.
14
3.2 Soluii constructive ale schimbatoarelor de vitez ce pot echipa autocamionul
proiectat.
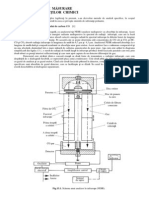
n figura 3.2 este reprezentat construcia cutiei de viteze a autocamionului SR-131, care
se caracterizeaz prin patru trepte de mers nainte i una de mers napoi. Treptele II, III, IV, sunt
sincronizate. Mecanismul de comand, fixare i zvorre este montat n capacul lateral al cutiei
de viteze (figura 3.3)
Fig. 3.2 Cutia de viteze a autocamionului SR-131:
1- arbore primar; 2, 3 i 15- rulmeni cu bile; arbore intermediar; 5, 7, 8 i 11- roile dinate pentru trepte de mers
nainte, de pe arborele intermediar; 6- roat dinat pentru mersul napoi; 9- blocul roilor dinate de pe arborele de
mers napoi; 10- carterul cutiei de viteze; 12- rulment cu role; 13- flana arborelui secundar; 14- tamburul frnei
centrale; 17- muf cu cuplare cu sincronizator pentru treapta a II-a; 20- arbore secundar; 21- muf cu cuplare cu
sincronizator pentru treptele a III-a i a IV-a; 22- roat dinat a arborelui primar; 23- rulment cu role-arc.
Fig. 3.3 Mecanismul de comand, fixare i zvorre a treptelor cutiei de viteze a autocamionului SR-131:
1- manet de schimbare a vitezelor; 2- arcul mecanismului de fixare; 3- bila mecanismului de fixare; 4- furc de
cuplare pentru treptele I i a II-a; 5- tij culisant pentru treptele I i a II-a; 6- tift; 7- furc de cuplare pentru
treptele a III-a i a IV-a; 8- tij culisant pentru treptele a III-a i a IV-a; 9- bila mecanismului de zvorre; 10- tij
culisant pentru mersul napoi; 11- furc de cuplare pentru mersul napoi..
15
n figura 3.4 este reprezentat construcia i schema cinematic a cutiei de viteze cu ase
trepte, iar n figura 3.5. schema cinematic a cutiei de viteze cu ase trepte cu reductor, care
permite dublarea numrului de trepte de vitez.
Caracteristic cutiei de viteze cu cinci i ase trepte, utilizate la automobilele ROMAN,
este faptul c roile dinate de pe arborele secundar sunt montate prin intermediul unor rulmeni
cu role-ace. Cuplarea tuturor treptelor de vitez se face prin mufe de cuplare cu sincronizator.
Figura 3.4 Cutia de viteze cu ase trepte pentru automobile tip ROMAN i DAC
a- seciune longitudinal; b- schema cinematic; 1- arbore primar; 2, 14, 16, i 29- rulmeni; 3- roata dinat de pe
arborele primar; 4- capacul cutiei de viteze; 5- tij; 6, 8, 9, 11 i 13- roile dinate de pe arborele secundar; 7, 10 i
12- furcile mecanismului de comand a treptelor; 15- arbore secundar; 17- roata dinat de pe arborele de mers
napoi; 18, 20, 21, 24, 25, i 27- roile dinate de pe arborele intermediar; 19, 23 i 26- mufe de cuplare cu
sincronizator pentru treptele I i a II-a, a III-a i a IV-a, respectiv a V-a i a VI-a; 22- arbore intermediar; 28- carter;
30- arbore de mers napoi; 31- muf de cuplare cu sincronizator pentru mersul napoi; 32- roat dinat pentru
mersul napoi montat pe arborele secundar.
16
Figura 3.5 Cutia de viteze cu ase trepte, cu reductor-distribuitor, pentru automobile tip ROMAN i DAC:
1, 3, 5, 7, 9 i 17- roi dinate pentru mersul nainte, montate pe arborele secundar; 2, 4, 6, 8, 10 i 12- roi dinate
pentru mersul nainte montate pe arborele intermediar; 13, 14, 15 i 16- roi dinate pentru mersul napoi; 17 i 18-
roi dinate n angrenare permanent, de la reductorul cutiei de viteze; 19 ,20, i 21- mufe de cuplare pentru treptele I
i a II-a, a III-a i a IV-a, i, respectiv, a V-a i a VI-a; 22- muf de cuplare a treptelor I i a II-a ale reductorului; 23-
muf de cuplare a treptei de mers napoi; 24- arborele primar al reductorului; 25 arbore intermediar; 26- arbore
secundar; 27- arborele de mers napoi; 28- carterul cutiei de viteze; 29- carterul reductorului; 30- arborele
intermediar al reductorului; 31- arborele secundar al reductorului.
Fig.3.3 Schimbtor de vitez pentru autocamione, cu trei etaje, 16 viteze, doi arbori intermediari, tip ZF-AS
TRONIC 16 AS 2600. Formula de creare a schimbtorului de viteze 2x4x2. Reductorul divizor i cel multiplicator
realizeaz cuplarea roilor prin sincronizatoare, n timp ce schimbtorul principal prin roi baleatoare
Datorit necesitii unei game foarte variate de rapoarte de transmitere, schimbatorul de
vitez ce va echipa autocamionul proiectat va fi cu trei arbori sau va avea n componen
reductoare suplimentare. n continuare se vor analiza diferite soluii constructive pentru
schimbtoare de vitez deja existente pe piaa.
17
Fig.3.4 Scheme cinematice ale unor schimbtoare de viteze cu trei arbori pentru autocamioane:
P-arbore primar; I-arbore intermediar; S-arbore secundar; MI-ax roat mers napoi;
S1,S2,S3- sincronizatoare
n figura 3.4 a, se este indicat schema cinematic constructiv a unui schimbtor de
vitez cu 5 trepte pentru mers nainte i o treapt pentru mersul napoi. Ultima treapt este de
supravitez. Se observ c mai exist un lagr suplimentar pentru arborele secundar, iar una din
roi este montat n consol. Soluia aceasta este condiionat i de faptul c schimbtorul de
vitez deriv dintr-un schimbtor cu 4 trepte.
n figura 3.4 b, este prezent schema cinematic a unui schimbtor de vitez cu 5 trepte
pentru mersul nainte i o treapt pentru mersul napoi, cu sprijinire multipl a arborilor (arborele
secundar are 3 lagre, iar arborele intermediar are 4 lagre). Modul de realizare a treptelor este
artat n tabelele de angrenare 3.1a i 3.2b.
Tab.3.1a Modul de realizare a treptelor schimbtorului de vitez cu schema cinematic din figura 3.4a
Tab.3.1b Modul de realizare a treptelor schimbtorului de vitez cu schema cinematic din figura 3.4b
18
n figura 3.5 este prezentat schema cinematic a unui schimbtor de vitez de
autocamion cu trei arbori (doi arbori intermediari)- Fuller:5+1 trepte.
Fig.3.5 Schema cinematic a unui schimbtor de vitez de autocamion cu trei arbori (doi arbori
intermediari)- Fuller:5+1 trepte
Din schema cinematic prezentat n figura 3.5 se deduce cu uurin modul cum se
realizeaz cele 5 trepte pentru mers nainte. Pentru mersul napoi se folosesc roile 7, 8, i 6,
care sunt n angrenare permanent,la fel ca i 7, 8 i 6, iar roata 6 se solidarizeaz cu arborele
secundar prin intermediul dispozitivului de cuplare de pe acest arbore. Axele celor 4 arbori sunt
coplanare, astfel c arborele intermediar este supus doar la moment de torsiune, fora rezultant
care se exercit asupra lui fiind nul.
Pentru a realiza valori sczute ale saltului de etajare trebuie s se mreasc numrul de
trepte, care poate ajunge chiar la 20. n acest scop se folosete un schimbtor de viteze propriu-
zis, numit schimbtor de viteze principal, i unul sau doua reductoare nseriate cu acesta. n
figura 3.6 sunt prezentate 2 tipuri de astfel de schimbtoare de vitez. n figura 3.6 a, este
prezentat schema cinematic a unui schimbtor de vitez principal cu 4 trepte nseriat cu un
reductor divizor cu dou trepte. Reductorul este cu trei arbori, roile sale fiind 1r, 2r,1r, 2r.
Modul de realizare a treptelor se deduce uor din schema cinematic. n fidura 3.6 b, este
indicat schema cinematic a unui schimbtor de vitez principal urmat de un reductor
multiplicator cu dou trepte. i n acest caz reductorul are dou trepte ( una dintre ele fiind priz
direct), soluia constructiv fiind cu trei arbori. Roiile acestuia sunt1r, 2r, 1r, 2r.Ca redactor
multiplicator poate fi folosit i un reductor planetar.
19
Fig.3.6 Schema cinematic a unui schimbtor de vitez cu reductoare suplimentare:
a) cu reductor divizor (dispus naintea schimbtorului de vitez principal);
b) cu reductor multiplicator (dispus dup schimbtorul de vitez principal)
Frecvent pentru contrucia schimbtorului de vitez cu reductor divizor se folosete
schema cinematic prezentat n figura 3.7.
Fig.3.7 Schema cinematic a unui schimbtor de vitez cu reductoare suplimentar dispus n partea din fa, avnd
arborele intermediar comun cu cel al schimbtorului de vitez principal
Schimbtorul de vitez principal are 6 trepte pentru mersul nainte i o treapt pentru
mersul napoi ( se folosesc roile 1, 2, 3, 4, 5, 6 i 1, 2, 3, 4, 5 i 6). Strict vorbind, nu exist
un reductor nseriat cu un schimbtor de viteze principal. Exist doi arbori primari coaxiali care
se i pot cupla ntre ei i un singur arbore intermediar. Cnd este cuplat reductorul, roata 1r, care
angreneaz permanent cu roata 2r, este solidarizat cu arborele primar Pr. Rapoartele de
transmitere se realizeaz cu ajutorul acestui angrenaj permanent i al oricrui angrenaj ce conine
una din roile 2 la 6. Cnd arborele primar Pr este solidarizat cu arborele primar P prin
intermediul sincronizatorului i al roii 3r, angrenajul permanent1-1 este pus sub sarcin i
raportul de transmitere se realizeaz cu ajutorul acestlui angrenaj i al oricprui angrenaj ce
conine una din roile 2 la 6 ( pentru mersul napoi sunt folosite roile 6, 7 i 7.
Un alt tip de schimbtor de vitez utilizat la autocamioane este cel cu 6 arbori prezentat
n figura 3.8.
20
Fig.3.8 Schema cinematic a unui schimbtor de vitez cu axele arborilor fixe i cu ambreaje
de cuplare a treptelor ( 6 arbori, 6 trepte nainte, 1 treapta de mers napoi)
n partea dreapt a schemei cinematice din figura 3.8 se poate urmrii dispunerea spaial
a celor 6 arbori. Pentru realizarea unei trepte trebuie s fie cuplate simultan dou ambreaje, aa
cum se evideniaz n tabelul de angrenare 3.2. Astfel acest schibtor de vitez are trei grade de
mobilitate.
Tab.3.2 Modul de realizare a treptelor schimbtorului de vitez cu schema cinematic din figura 3.8
21
Din prezentarea schemelor cinematice ale schimbtoarelr de vitez normale, se poate
trage concluzia c, principial, nu sunt dificulti n alegerea unei scheme cinematice adecvate
(unele aspecte sunt mai dificile n legtira cu schemele similare cu cele din figura 3.8). Din punct
de vedere cinematic principiul de organizare este acelai, mai concret dispunerea roilor trebuie
s asigure compactitate maximp, rigiditate mrit a arborilor i realizarea treptei de mers napoi
respectnd cerinele menionate).
3.3 Prile componente ale schimbtorului de vitez
3.3.1 Sistemul de acionare
Sistemul de acionare al cutiei de viteze servete la cuplarea i decuplarea treptelor de
vitez. Alegerea treptei de vitez, respectiv a raportului de transmitere, pentru diferite condiii de
deplasare se poate face printr-un sistem manual, automat, sau semiautomat. Oricare ar fi tipul
sistemului ales el trebuie sa sadisfac urmtoarele condiii:
-construcie simpl
-siguran n funcionare
-cost redus
-efort minim din partea conductorului
-ntreinere uoar
Sistemul de acionare la cutiile de viteze cu mecanice n trepte cu arbori cu axe fixe, n
majoritatea cazurilor, este mecanic.
n figura 3.9 este prezentat construcia mecanismului de acionare a treptelor cu maneta
pe capacul cutiei de viteze.
Fig.3.9 Mecanismul de comand a treptelor de vitez
cu maneta pe capacul cutiei de viteze
Maneta 1 este prevzut cu nuca sferic S pentru a putea oscila n locaul sferic al
capacului 7. Tijele 5 i 6, pe care sunt fixate furcile 4 i respectiv 3, pot culisa n locaurile
respective din capac. La rndul lor, furcile sunt prevzute cu locauri n form de U, n care
poate ptrunde captul inferior al manetei. Fiecare furc poate comanda succesiv dou trepte.
Nuca sferic este apsat n locaul su de arcul 2.
Pentru a cupla o anumit treapt de vitez, este necesar s se deplaseze maneta, n plan
transversal (sgeile A-A), astfel nct captul ei s ptrund n locaul furcii de pe tija 5 sau
6(corespunztoare treptei respective). Apoi, prin deplasarea manetei n plan longitudinal
(sgeile B-B), tija culiseaz mpreun cu furca fixat pe ea, care intr n locaul roilor sau
mufelor treptei respective, deplasndu-se i realiznd astfel cuplarea treptei de vitez.
22
n figura 3.10 este reprezentat mecanismul de comand cu maneta pe coloana volanului.
n suporturile 9 i 16, pe coloana volanului, este montat axul 11, pe al crui capt
superior, n suportul 13, se monteaz maneta 14 de schimbare a treptelor de vitez. Bolul 15,
nurubat n suportul 16, servete ca reazem manetei 14. La captul inferior al axului 11 este
montat tiftul 10, care-l leag cu prghia 7. La rotirea manetei 14, din poziia neutr, n sensul
acelor de ceasornic, se cupleaz treapta a III-a de vitez, iar n sens contrar, treapta a II-a. Pentru
cuplarea treptei I i de mers napoi, maneta 14 se ridic i, ca urmare, axul 11 se deplaseaz n
sus, comprimnd arcul 12, iar tiftul 10 leag prghia S cu axul 11. n aceast poziie, la rotirea
manetei 14 n sensul acelor de ceasornic se cupleaz treapta I, iar la rotirea n sens contrar se
realizeaz mersul napoi.
Fig.3.9 Mecanismul de comand a treptelor de vitez cu maneta pe coloana volanului
De la prghiile 7 i 9, micarea se transmite prin tijele 4 i 5 la prghiile 2 i 3, fixate pe
nite fusuri, n capacul lateral 1 al cutiei de viteze. Pe capetele interioare ale fusurilor sunt fixate
prghiile cu sectoarele 20, precum i furcile 6 de schimbare a vitezelor. Furca din fa ptrunde
n gulerul mufei de sincronizare, iar cea din spate n gulerul roii dinate pentru treapta I i cea de
mers napoi. ntre sectoare este montat dispozitivul de fixare, compus din pistonul plonjor 17 cu
dou bile 19 i arcul 18.
3.3.2 Sistemul de fixare a treptelor de vitez
Pentru fixarea treptelor (figura 3.10), fiecare tij culisant 3 are pe partea superioar trei
locauri semisferice n care poate intra bila 1, apsat de arcul 2. Locaurile extreme corespund
celor dou trepte pe care le realizeaz furca fixat pe tija respectiv, iar cel din mijloc
corespunde poziiei neutre. Distanele dintre aceste locauri trebuie astfel alese, nct s asigure
angrenarea roilor pe toat lungimea dinilor. Tensiunea arcului trebuie s nu permit deplasarea
de la sine a tijei culisante respective (datorit vibraiilor sau forelor axiale produse la angrenarea
roilor), ci numai datorit efortului depus de conductorul auto.
23
Fig.3.10 Mecanismul de fixare a treptelor de vitez
Zvorrea treptelor de vitez (figura 3.11)se obine prin practicarea unui loca n fiecare
tij 2, astfel nct bolul (zvorul) 1 s mpiedice cuplarea simultan a dou trepte. Unele scheme
de organizare prevd n locul bolului 1 cte dou bile.
Fig.3.11 Mecanismul de zvorre a treptelor de vitez
Schema de funcionare a mecanismului de zvorre (blocare) a treptelor unei cutii de
viteze cu patru trepte este prezentat n figura 3.12. Tijele culisante extreme 1 i 5 au practicate,
n plan orizontal, pe partea interioar cte un loca semisferic, iar tija central are dou asemenea
locauri pe pri diametral opuse. n dreptul locaurilor, tija central are un orificiu n care se
monteaz tiftul 4. ntre tija central i cele extreme se gsesc cte dou bile (zvoare) 2 i 6.
n poziia neutr, toate locaurile se afl pe aceeai linie, iar ntre bile i locauri exist un
mic joc. Acionndu-se asupra tijei centrale 3 (figura 3.12 a.), ea va determina bilele 2 i 6 s
ias din locaurile ei i s intre n locaurile tijelor extreme. Astfel, acestea se vor zvor pn
cnd tija central este readus n poziia neutr. Acionndu-se asupra tijei 1 (figura 3.12 b.),
bilele 2 ies din locaul lor i ptrund n locaul tijei centrale 3, unde deplaseaz tiftul 4 n
locaul su ctre cealalt parte a tijei 3. Prin aceasta, se acioneaz asupra bilelor 6, care vor fi
obligate s intre n locaul tijei 5. Astfel, tijele 3 i 5 vor fi zvorte. Acionndu-se asupra tijei
5, se vor zvor tijele 1 i 3 (figura 3.12 c.).
Fig.3.12 Schema de funcionare a mecanismului de zvorre a treptelor de vitez
24
3.3.3 Sistemul de cuplare a treptelor de vitez
Cuplarea treptelor de vitez se face prin intermediul sincronizatoarelor. Acestea sunt
mecanisme speciale ce realizeaz egalarea vitezelor unghiulare ale arborelui i roii dinate
nainte de solidarizarea n rotaie a lor.
Utilizarea sincronizatoarelor este cea mai important perfecionare a schimbtorului de
vitez cu arbori cu axe fixe. Sincronizatoarele permit s se realizeze o schimbare rapid i fr
oc a treptelor independent de indemrarea conductorului. Clasificarea sincronizatoarelor se
face dup forma suprafeei de frecare i dup principiul de funcionare. Astfel acestea pot fi:
-sincronizatoare cu conuri;
-sincronizatoare cu discuri;
-sincronizatoare cu presiune constant sau simple;
-sincronizatoare cu inerie sau sincronizatoare cu blocare.
Fig.3.13 Schema de funcionare a sincronizatorului cu blocare
3.4 Alegerea justificativ a schimbtorului de vitez ce va echipa autocamionul
n urma analizei schimbtoarelor de vitez ce echipeaz modelele similare deja existente
pe pia s-a ales pentru echiparea autocamionului de proiectat un schimbtor de viteze cu 8 trepte
alctuit dintr-un reductor cu 2 trepte i un schimbtor principal cu 3 arbori, cu 4 trepte de mers
nainte i una de mers napoi. Roile dinate vor fi cu dini nclinai datorit sileniozitii n
angrenare. Mecanismul de acionare va fi unul mecanic prin cuplare direct cu ajutorul tijelor i
prgiilor culisante, acesta va fi prevzut cu manet deasupra schimbtorului de vitez iar
cuplarea treptelor se va realiza prin intermediul unor sincronizatoare conice cu dispozitiv de
blocare.
25
Capitolul 4 Stabilirea schemei de organizare a SV i determinarea
numrului de dini pentru roile dinate.
4.1 Stabilirea schemei de organizare generala a SV
n vederea echiprii autocamionului s-a ales proiectarea unei variante similare a
schimbtorul de viteze ce echipeaz la ora actual autocamioanele existente pe pia. Acesta a
fost prezentat pe larg n capitolul 3.
Figura 4.1 Schema de organizare de ansamblu a unui schimbtor de viteze cu patru trepte
Astfel, cunoscnd numrul de trepte al schimbtorului de viteze, i anume 5 trepte, se va
alege pentru cuplarea roilor dinate soluia cu sincronizatoare, aceasta fiind ntlnit la
majoritatea autocamioanelor ce circula n Europa. Poziia roilor dinate fa de lagrele
arborilor, se realizeaz iniial pe baza modelelor similare urmnd ca mai apoi aceasta s fie
definitivat prin calcule innd seama de o serie de factori: limea roilor, limea
sincronizatoarelor, distanele dintre roile dinate, limea lagrelor.
Distana dintre axele arborilor este determinat cu relaia:
( )
3
4
1
1
u
u T
K a
a
+
=
Unde: 278 , 0 =
a
K pentru autocamioane
1
T -momentul de torsiune la pinionul treptei I de viteza.
Pentru SV cu 3 arbori,
G CG
T i T =
1
, unde
CG
i este raportul de transmitere al angrenajului
permanent, iar
G
T este momentul motor.
u raportul de transmitere al primei trepte.
( )
mm a 845 , 195
143 , 2
1 143 , 2 4 10 28 , 1920
278 , 0
3
4 3
=
+
=
Se va alege conform STAS i innd cont de modelele similare distana mm C 200 = .
26
4.2 Determinarea distanei dintre axele arborilor i a modulului normal al danturii
n cazul schimbtorului de vitez cu trei arbori ( cu priz direct), raportul de transmitere
al treptei j este:
ij
sj
p
i
sj
z
z
z
z
i =
unde:
i
z este numrul de dini al roii de pe arborele intermediar care angreneaz permanent cu
pinionul arborelui primar
p
z -numrul de dini al pinionului de pe arborele primar
ij
z -numrul de dini al roii de pe arorele intermediar corespunztoare treptei j;
sj
z -numrul de dini ai roii de pe arborele secundar corespunztoare treptei j (ea angreneaz cu
roata avnd numrul de dini
ij
z ).
Axele arborilor primar i secundar sunt coliniare i paralele cu axa arborelui intermediar.
Deci distanele dintre centrele roilor conjugate este constant:
wtj
t
sj ij
j
nj
wt
t
p i
n
w
z z
m
z z
m
a
o
o
| o
o
| cos
cos
) (
cos 2 cos
cos
) (
cos 2
+
= +
=
Sau:
1
8 , 7
8 7
6 , 5
6 5
4 , 3
4 3
2 , 1
2 1
2
cos cos cos cos
C
m
C z z z z z z z z
=
=
+
=
+
=
+
=
+
| | | |
unde:
n
m este modulul normal al pinionului de pe arborele primar
nj
m - modulul normal al roilor conjugate de pe arborele intermediar i secundar
corespunztoare treptei j
| - unghiul de nclinare a diniilor pinionului de pe arborele primar
j
| - unghiul de nclinare a diniilor roilor conjugate de pe arborele intermediar i
secundar corespunztoare treptei j
t
o -unghiul de presiune frontal de referin
wtj wt
o o , - unghiul de angrenare frontal corespunztor roilor cu numere de dini
i
z i
p
z ,
respectiv
ij
z i
sj
z
ntr-o prim etap a stabilirii numrului de dini se poate considera cazul mai simplu al
angrenajului zero-deplasat ( 0
2 1
= +
p p
x x ). n aceast situaie
t wt
o o = ,
t wt
o o = . Pentru
simplificare i ieftinirea procesului de producie se recomand pe ct posibil, modulele normale
ale roiilor s fie aceleai.
j
sj ij p i
n
w
z z z z
m
a
| | cos 2 cos 2
+
=
+
=
Unghiurile de nclinare ale dinilor se recomand a avea valorile situate ntr-un interval
[20,30] pentru autocamioane. Se caut ca solicitrile axiale s fie ct mai mici. La arborele
intermediar, dac se alege adecvat nclinarea dinilor, se poate anula fora axial rezultant ce
solicit rulmenii acestuia. Pentru aceasta, n primul rnd trebuie ca nclinarea diniilor de pe
arborele intermediar s fie la toate roile ori spre stnga ori spre dreapta. n general se alege
direcia n asa fel nct fora axial s fie orientat ctre exteriorul schimbtorului de viteze.
27
Modulele roilor dinate se determin n funcie de tipul automobilului i valoarea
momentului maxim ce poate fi transmis, utiliznd tabelul 4.1 .Adoptnd din tabel diametrul pitch
DP, modulul se determin cu relaia:
DP
m
n
4 , 25
=
Tipul automobilului
Momentul motor
m daN
Diametrul pitch (DP)
Dantur dreapt Dantur nclinat
Autoturisme
Pn la 16,6
17,3...27,6
Peste 27,6
10
8
8
12
12
10
Autocamioane
Pn la 27,6
27,6...34,6
34,6...41,5
Peste 41,5
7
6
6
5
8
7
6
6
Tabelul 4.1 Date necesare pentru alegerea diametrului pitch
23 , 4
6
4 , 25
= =
n
m
Determinarea prealabil a modulului se mai poate face i cu ajutorul graficului prezentat
n figura 4.2. Gama modulelor este standardizat (STAS 822-61) i se prevd valori pentru
n m = 25 , 0 (n fiind numr ntreg)
Fig. 4.2 Grafic pentru determinarea prealabil a modulului roilor dinate
Se adopt pentru valoarea modulului roilor dinate valoarea 5 , 4 =
n
m .
La schimbtoarele de vitez cu dini nclinai suma dinilor roilor dinate trebuie s
cresc cu 2-3 uniti de la stnga la dreapta pentru a realiza o descrcare a lagrelor de forele
axiale. Deci n acest caz:
8 7 6 5 4 3 2 1
z z z z z z z z + = + ( + ( +
28
4.3 Determinarea numrului de dini pentru roile dinate
n cazul n care toate roiile au acelai modul normal, distana dintre axele arborelui
secundar ( sau primar) i intermediar este:
m
C z z z z z z z z z z
=
+
=
+
=
+
=
+
=
+ 2
) cos( ) cos( ) cos( ) cos( ) cos(
10 , 9
10 9
8 , 7
8 7
6 , 5
6 5
4 , 3
4 3
2 . 1
2 1
| | | | |
= = = = = 25
10 , 9 8 , 7 6 , 5 4 , 3 2 . 1
| | | | |
88 , 88
5 , 4
200 2
) cos( ) cos( ) cos( ) cos( ) cos(
10 , 9
10 9
8 , 7
8 7
6 , 5
6 5
4 , 3
4 3
2 . 1
2 1
=
=
+
=
+
=
+
=
+
=
+
| | | | |
z z z z z z z z z z
Rezultatele experimentale au artat c suma diniilor toilor dinate cu dini nclinai
trebuie s creasc cu 2-3 uniti de la stnga la deapta pentru a realiza o descrcare a lagrelor
de forele axiale.
Deci n acest caz: 80
8 7 6 5 4 3
s + ( + ( + z z z z z z
Se vor adopta astfel:
73
4 3
= + z z
75
6 5
= + z z
77
8 7
= + z z
80
10 9
= + z z
a) Treapta I-a.
8
7
1
2
1
z
z
z
z
i
s
= ; Pentru a nu rezulta un schimbtor de viteze nalt se alege
9
10
1
2
z
z
z
z
= , iar
10 1
z z =
n felul acesta rezult: 80
10 9
= + z z , dar 21 36 , 20
10 1 1
10
9
1
2
= = = = z z i
z
z
z
z
s
dini;
61 47 , 61 57 , 8 21
1 1 9 2
= = = =
s
i z z z dini.
b) Treapta II-a.
725 , 1
61
01 , 5 21
2
2 1
8
7
8
7
1
2
2
=
= =
z
i z
z
z
z
z
z
z
i
s
s
77
8 7
= + z z
29 25 , 28
8
= z dini ; 51
7
= z dini
c) Treapta III-a.
01 , 1
61
93 , 2 21
2
3 1
6
5
6
5
1
2
3
=
= =
z
i z
z
z
z
z
z
z
i
s
s
75
6 5
= + z z
37 5 , 37
6
= z dini ; 39
5
= z dini
d) Treapta a IV-a
589 , 0
61
71 , 1 21
2
3 1
4
3
4
3
1
2
4
=
= =
z
i z
z
z
z
z
z
z
i
s
s
73
4 3
= + z z
47 94 , 45
4
= z dini ; 27
3
= z dini
29
n cazul n care deplasarea sculei este simetric la corectarea dintilor 0
2 1
= + ,
elementele geometrice ale angrenajului sunt:
( ) mm z z
m
C C 240
2
2 1
= + = = '
( ) m a + =
'
, 1
1
; ( ) m a =
'
, 1
2
( ) m b =
'
, 2 , 1
1
; ( ) m b + =
'
, 2 , 1
2
( ) + + = 2 2
1 1
z m d
e
; ( ) + = 2 2
2 2
z m d
e
( ) + = 2 4 , 2
1 1
z m d
i
; ( ) = 2 4 , 2
2 2
z m d
i
|
.
|
\
|
+ = o
t
tg m s
d
2
2
1
; |
.
|
\
|
= o
t
tg m s
d
2
2
2
n care: a i b reprezint nlimea capului i a piciorului dintelui;
e
d i
i
d - diametrele exterioare i interioare
d
s - grosimea dintelui msurat pe cercul de divizare;
2 , 0 325 , 0 ... 125 , 0 = = pentru acest caz
= 20 o - unghiul de angrenare;
4.4 Calculul rapoartelor de transmitere finale i trasarea diagramei fierstru reale
Rapoartele de transmitere finale sunt prezentate n tabelul 4.2.
Treapta i
s
1 8,57
2 5,01
3 2,93
4 1,71
5 1,00
Tab 4.2 Valorile rapoartelor de transmitere finale ale SV
n V
I
V
II
V
III
V
IV
V
V
1050 5,614208 9,273141 15,47163 28,38789 47,37068
1100 5,881551 9,714719 16,20838 29,7397 49,62642
1150 6,148894 10,1563 16,94512 31,0915 51,88217
1200 6,416238 10,59788 17,68187 32,4433 54,13791
1250 6,683581 11,03945 18,41861 33,79511 56,39366
1300 6,950924 11,48103 19,15536 35,14691 58,64941
1350 7,218267 11,92261 19,8921 36,49872 60,90515
1400 7,485611 12,36419 20,62884 37,85052 63,1609
1450 7,752954 12,80577 21,36559 39,20233 65,41665
1500 8,020297 13,24734 22,10233 40,55413 67,67239
1550 8,28764 13,68892 22,83908 41,90593 69,92814
1600 8,554984 14,1305 23,57582 43,25774 72,18389
1650 8,822327 14,57208 24,31257 44,60954 74,43963
1700 9,08967 15,01366 25,04931 45,96135 76,69538
1750 9,357013 15,45523 25,78605 47,31315 78,95113
30
1800 9,624357 15,89681 26,5228 48,66496 81,20687
1850 9,8917 16,33839 27,25954 50,01676 83,46262
1900 10,15904 16,77997 27,99629 51,36856 85,71836
1950 10,42639 17,22155 28,73303 52,72037 87,97411
2000 10,69373 17,66313 29,46978 54,07217 90,22986
2050 10,96107 18,1047 30,20652 55,42398 92,4856
2100 11,22842 18,54628 30,94327 56,77578 94,74135
2150 11,49576 18,98786 31,68001 58,12759 96,9971
2200 11,7631 19,42944 32,41675 59,47939 99,25284
2250 12,03045 19,87102 33,1535 60,8312 101,5086
2300 12,29779 20,31259 33,89024 62,183 103,7643
Tab 4.3 Valorile vitezei autocamionului in diferite trepte ale SV
Fig 4.3 Diagrama fierstru real
0
10
20
30
40
50
60
70
80
90
100
110
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600
V [Km/h]
n [rot/min]
Diagrama fierstru
treapta I
treapta II
treapta III
treapta IV
treapta V
31
Capitolul 5 Calculul i proiectarea mecanismului reductor
5.1 Alegerea materialelor pentru roile dinate
Pentru roile dinate se utilizeaz de obicei oeluri nalt aliate datorit solicitrilor ridicate
la care sunt supese i pentru a reduce ct mai mult masa i dimensiunile acestora. Conform
tabelului 5.1 s-a ales ca material pentru roile dinate 18MoCrNi13.
Tabelul 5.1 Principalele materiale utilizate pentru roi dinate
Duritatea miezului: D=260HB
Duritatea flancului: DF=59HRC
Rezistenta la pitting:
=1504 MPa
Rezistena la piciorul dintelui:
=450 MPa
Rezistenta la rupere:
=950 MPa
5.2 Determinarea elementelor dimensionale principale ale angrenajului
Calculul de proiectare al angrenajelor cilindrice cu dini nclinai au la baz metodologia
de calcul cuprins n STAS 12268-84 i 12223-84 particularizat condiiilor de funcionare a
angrenajelor din transmisiile mecanice uzuale.
n urma calculelor de dimensionare a angrenajelor prezentate n capitolul precendent au
fost determinate:
- distana dintre axe: mm a 200
12
= ;
- modulul normal al danturii: 5 , 4 =
n
m ;
32
-unghiul de nclinare al danturii: = 25 | , acesta fiind recomandat pentru roi dinate cu
danturi durificate superficial
-numrul de dini ai roilor dinate:
z1 z2 z3 z4 z5 z6 z7 z8 z9 z10
21 61 27 47 39 37 51 29 61 21
Distamta dintre axe :
()
(5.1)
in care : m
n
modulul normal
Z numarul de dinti al rotii conducatoare
Z numarul de dinti al rotii conduse
unghiul de inclinare a danturii
Se defineste unghiul profilului danturii in plan frontal :
=arctg(
) (5.2)
in care
=
- unghiul profilului de referinta.
Unghiul de rostogolire frontal :
=accos(
) (5.3)
Suma deplasarilor specifice ale danturii rotilor in plan normal:
=x+x =( )
(5.4)
Numarul de dinti ai rotilor echivalente:
(5.5)
Repartizarea deplasarilor pe cele doua roti dintate care formeaza un angrenaj se face cu
ajutorul diagramei din figura 5.1.
Figura 5.1 Determinarea coeficientilor de deplasare ai danturilor
33
Rezultetele calcurilor efectuate cu ajutorul formulelor mentionate anterior se vor
centraliza in urmatorul tabel.
angrenaj 1 2 3 4 5
[
o
] 25 25 25 25 25
m
n
[mm] 4,5 4,5 4,5 4,5 4,5
Z 21 27 39 51 61
Z' 61 47 37 29 21
A
0
[mm] 203,573 183,712 188,678 198,608 203,573
0
[
o
] 20 20 20 20 20
f
[
o
] 21,88 21,88 21,88 21,88 21,88
wf
[
o
] 19,171 31,527 28,904 22,853 19,171
x
s
-0,755 -0,675 -0,693 -0,73 -0,748
x
s
/2 -0,374 -0,338 -0,347 -0,365 -374
Z
e
28,209 36,269 52,389 68,508 81,941
Z
e
' 81,941 63,135 49,702 38,956 28,209
(Z
e
+Z
e
')/2 55,075 49,702 51,045 53,732 55,075
x -0,6 -0,9 -0,369 -0,603 -0,8
x' -0,148 0,225 -0,324 -0,127 0,052
Pentru a putea exemplifica calculul arborilor ai schimbatorului de viteze trebuie calculate
marimile geometrice ale rotilor dintate pentru fiecare angrenaj.
Aceste rezultate vor fi obtinute cu ajutorul formulelor ce se vor exemplifica , urmand ca
reprezentarea acestora sa se faca in tabelul 5.2
Elementele geometrice ale cremalierei de referinta:
(5.6)
(5.7)
(5.8)
(5.9)
(5.10)
(5.11)
(5.12)
Se defineste diametrul de divizare ,diametrul de baza si diametrul de rostogolire :
=
*Z (5.13)
(5.14)
*
(5.15)
34
Diametrul interior si cel exterior al rotii:
-2*
(1.25-x) (5.16)
+2*
( 1+ x) (5.17)
Grosimea dintelui pe cercul de divizare in plan frontal:
f f
f
df
tg x m
m
s o
t
+
= 2
2
(5.18)
Grosimea dintelui pe cercul exterior in plan frontal:
( )
ef vf ef ef
inv inv D s o o = (5.19)
unde:
|
|
.
|
\
|
o = o o +
o +
t
= o
f
e
d
ef f
0
vf
cos
D
D
arccos ; inv
Z
tg x 2
2
inv (5.20
Pentru evitarea stirbirii dintelui la cap, ca urmare a ascutirii accentuate, se recomanda:
n ef
m 4 , 0 s >
(5.21)
Gradul de acoperire:
s a 12
c + c c = c
(5.22)
( ) ( )
f f
2
'
b
2
'
e
f f
2
b
2
e
12
cos p 2
D D
cos p 2
D D
o
+
o
= c
(5.23)
f f
wf
a
cos p
sin A
o
o
= c
(5.24)
n
s
m
sin ' B
t
|
= c
(5.25)
unde:
d D
D ' B + = (5.26)
B latimea rotii conduse a angrenajului
3 , 0 = +
D
factorul de latime a danturii
35
In urmatorul tabel se vor centraliza toate elementele geometrice ale angrenajului cu
ajutorul formulelor precedente.
angrenaj 1 2 3 4 5
a
0
[mm] 4,5 4,5 4,5 4,5 4,5
b
0
[mm] 5,625 5,625 5,625 5,625 5,625
c
0
[mm] 1,125 1,125 1,125 1,125 1,125
p
n
[mm] 14,137 14,137 14,137 14,137 14,137
h
0
[mm] 6,75 6,75 6,75 6,75 6,75
m
f
[mm] 4,965 4,965 4,965 4,965 4,965
p
f
[mm] 15,598 15,598 15,598 15,598 15,598
D
d
[mm] 104,269 134,06 193,643 253,225 302,877
D
d
' [mm] 302,877 233,364 183,712 143,991 104,269
D
b
[mm] 98,487 114,272 169,521 233,349 286,081
D
b
' [mm] 286,081 198,918 160,828 132,688 98,487
D
r
[mm] 102,439 145,946 205,263 255 297,561
D
r
' [mm] 297,561 254,054 194,737 145 102,439
D
i
[mm] 87,619 114,71 179,072 236,55 284,423
D
i
' [mm] 290,294 224,138 169,543 131,597 93,49
D
e
[mm] 107,456 173,612 228,207 266,153 304,26
D
e
[mm]
(rotunjit)
108,5 174,6 228,2 266,2 304,3
D
e
' [mm] 310,131 283,04 218,678 161,2 113,327
D
e
' [mm]
(rotunjit)
310,1 283 219,7 161,2 113,3
B' [mm] 31,281 40,218 58,093 75,968 90,863
B' [mm]
(rotunjit)
32 41 59 76 91
B [mm]
(rotunjit)
32 41 59 76 91
36
5.3 Forele din angrenaje
Pentru calcularea fortelor din angrenaje se poate considera ca la angrenarea rotilor dintate
aceste forte actioneaza pe cercurile de divizarea ale rotilor.
Pentru cele cinci angrenaje ,se calculeaza forta tangentiala ,radiala si axiala tinandu-se
cont de momentul de intrare de 442 Nm si de urmatoarele relatii.
Forta tangentiala :
(5.27)
Forta radial :
(5.28)
Forta axiala :
*tg (5.29)
angrenaj
Moment
de
Ft
Fr
Fa
intrare
[Nm]
1 2958 36,833 14,792 17,176
2 5602 83,572 33,562 38,97
3 5602 57,857 23,235 26,979
4 5602 44,244 17,768 20,631
5 5602 36,991 14,855 17,249
5.4 Verificarea danturii
5.4.1 Verificarea la oboseal prin ncovoierea dintelui
Toate calculele de verificare se vor face pentru treptele I si II, pentru c n aceste trepte
momentul motor este cel mai mult amplificat, astfel solicitrile sunt cele mai ridicate.
Pentru calculul de oboseal prin ncovoierea dintelui se folosete formula:
1 |
o
k y p b
k F
d t
= (5.30)
n cazul automobilelor, eforturile adimisibile la ncovoiere se afl in intervalul
3000...5500 daN/cm
2
.
In formula (5.30) avem:
k
-este un coeficient care tine seama de influenta gradului de acoperire si a dispunerii inclinate
a sectiunii periculoase a dintelui;
k
d
-este un coeficient care tine seama de incarcarea dinamica a danturii;
p -este pasul dintelui pe cercul de divizare;
y- este un coeficint care tine seama de numrul de dini;
b- desemneaz limea pinionului;
F
t
- este forta tangentiala din angrenaj.
37
] [mm
b
p
+
= (5.31)
( )
2
2
2
1 cos
5 , 4
1 cos
15 , 1
172 , 0
z
z
y
=
|
|
(5.32)
Se aleg valorile:
k
d1
=1,2
k
d2
=1,5
k
1
=1,88
k
2
= 1,44
Se mai calculeaz:
p
1
= 17/1,7 = 10 m= 1cm
p
2
= 21/1,7 = 12,35mm =1.235 cm
y
1
= 0,11;
y
2
= 0,117
Avand in vedre ca se cunosc toi parametri din relatia (5.22) se poate calcula coeficientul
pentru ambele angrenaje.
2
1
/ 4 , 4694
588 , 1 11 , 0 1 7 , 1
2 , 1 1375,214
cm daN =
= o
2
2
/ 3 , 3442
44 , 1 117 , 0 235 , 1 4 , 2
5 , 1 1146,012
cm daN =
= o
Se observ c cele dou eforturi admisibile la ncovoiere se ncadreaz n intervalul
impus, deci dantura va rezista la ncovoiere.
5.4.2 Verificarea la presiune de contact
Presiunea superficial sau efortul unitar de contact are o mare influen aspura duratei de
funcionare a roilor dinate. Dac presiunea este prea mare se produce deteriorarea suprafeei de
lucru a dintelui. Efortul unitar maxim de contact se poate determina cu formula lui Hertz:
2
1
2 1
max
1 1
cos
418 , 0
|
|
.
|
\
|
+
=
o b
E F
p
t
(5.33)
unde:
F
t
fora tangentiala din angrenaj;
b latimea pinionului;
E = 2,1*10
6
daN/cm
2
modulul de elasticitate;
= 20
o
unghiul de presiune;
raza de curbur.
2
) (cos
sin
|
o
=
d
r
(5.34)
Efectuandu-se calculele se gasesc:
pentru angrenajul treptei I :
1
= 6,22 mm;
2
= 24,89 mm.
pentru angrenajul treptei II :
1
= 7,46 mm;
2
= 21,99 mm.
38
Se aplica formula (5.25) pentru ambele angrenaje si se obin:
p
1max
= 13330 daN/cm
2
p
2 max
= 11201,13 daN/cm
2
Avnd in vedere valorile maxime admisibile, se adopta tratamentul de cementare pentru
rotile dintate, iar angrenajele vor rezista la solicitarea de presiune de contact.
5.4.3 Verificarea la durabilitate a angrenajelor
n afara unei rezistente insuficiente la sarcini nominale sau de varf, scoaterea din
functiune a angrenajelor in exploatare apare frecvent datorita depasirii limitei de rezistenta a
materialului, provocat de sarcini periodic variabile. Durabilitatea angrenajelor este caracterizat
de capacitatea de funcionare ndelungat pana la atingerea valorii permise a uzurilor si pn la
apariia oboselii materialului.
Pentru efectuarea calculului de durabilitate se considera ca motorul dezvolta un moment
mediu echivalent M
ech ,
la o turatie medie echivalenta,
ech
.
Momentul echivanet mediu se calculeaza cu relatia:
t ech sv
med
ech
i
M
M
q
=
_
(5.35)
Unde: - M
med
momentul mediul la rotile motoare;
- i
sv_med
raportul de transmitere mediul al cutiei de viteze;
-
t
= 0,92 randamentul mecanic al transmisiei.
0
i
r G
G
Ft
M
r a
med
a
med
|
|
.
|
\
|
= (5.36)
M
med
= 150,7 Nm;
=
=
=
n
k
k
n
k
svk k
med sv
i
i
1
1
_
|
|
(5.37)
I
sv_med
= 2,06;
med sv
r
med
ech
i i
r
v
_ 0
= e (5.38)
V
med
= 0,45V
max
= 40,5 km/h
ech
= 1494.5 rpm
Deci: 49 , 78
92 , 0 06 , 2
7 , 150
=
=
ech
M Nm
39
5.5 Proiectarea arborilor si a organelor de rezemare
5.5.1 Predimensionarea arborilor i alegerea capetelor de arbori
Se alege ca arborele primar s se confecioneze dintr-o singur bucat, cu pinionul,
ambele avnd acelai material.
Deoarece n aceast faz nu se cunosc momentele de ncovoiere, predimensionarea se va
face doar la torsiune:
3
16
at
t
ca
M
d
t t
> , unde MPa
at
300 ... 150 e t (5.39)
Pentru arborele primar: mm d
p ca
38 89 , 36
300
2958000 16
3
=
>
t
Pentru arborele intermediar: mm d
i ca
48 64 , 45
300
5602000 16
3
=
>
t
Pentru arborele secundar: mm d
s ca
80 49 , 75
300
2958000 16
3
=
>
t
Se aleg conform STAS 8724/2-1971 diametrele capetelor de arbore ca fiind:
=
p ca
d 38 k6( )
018 , 0
002 , 0
+
+
=
i ca
d
48 k6( )
018 , 0
002 , 0
+
+
=
s ca
d
80 m6( )
018 , 0
002 , 0
+
+
5.5.2 Alegerea rulmenilor stabilirea preliminar a formei constructive a arborilor
Pentru lgruirea schimbtoarelor de viteze se folosesc rulmeni radiali-axiali cu role conice.
Pentru arborele primar se vor alege 2 rulmenti conici seria 32208 acestia fiind montai in O.
Pentru arborele intermediar rulmenii alei sunt 30210, cu role conice, ce vor fi montai n X.
Pentru arborele secundar rulmenii alei sunt:
-cu role ace pentru sprijinirea n arborele primar: K50x58x20
40
-cu role conice, pentru preluarea fortelor axiale: 32316
5.5.3 Verificarea canelurilor arborelui primar
Arborele ambreiajului (care este i arborele primar la schimbtorului de viteze) are o
poriune canelat pe care se deplaseaz butucul discului condus. Arborele este solicitat la
torsiune de ctre momentul de calcul al ambreiajului M
c
.
Diametrul interior se determina cu relatia:
3
max
2 , 0
at
i
M
d
t
|
=
| | MPa
at
300 = t
Diametrul interior al arborelui canelat se adopt din STAS dup care se adopt i celelalte
elemente ale canelurii.Se face verificarea la strivire i la forfecare.
mm d
i
97 , 41
300 2 , 0
10 2958 5 , 1
3
3
=
=
Din STAS 8724/2-74 se alege diametrul interior d
i
= 42 [mm].
Arborele va fi prevazut cu caneluri. Fora F care solicit canelurile se consider c este
aplicat la distana r
m
fa de axul arborelui i se determin cu relaia:
i e m
d d
M
r
M
F
+
= =
max max
2| |
- r
m
raza medie a arborelui canelat
- d
e
diametrul exterior al arborelui canelat
- d
i
diametrul interior al arborelui canelat
| | mm d
i
42 =
Se alege din STAS 1768 68 serie grea - arborele canelat 10x42x52.
Deci:
( )
| | daN F 9440
10 52 42
8 , 295 5 , 1 2
3
=
+
=
Inaltimea danturii este:
| | mm
d D
h
d
5
2
42 52
2
=
=
Canelurile se verifica la strivire si la forfecare.
41
Verificarea la strivire este data de relatia:
( )
( )| | MPa p
d d h l z
M
h l z
F
p
sa
i e
s
40 ... 25
2
max
= s
+
=
=
|
| |
sa s
p MPa p < =
= 3 , 36
5 52 10
94400
Efortul unitar la forfecare se determina cu relatia:
( )| | MPa
b l z
F
af f
30 ... 20 = s
= t t
| |
af f
MPa t t < =
= 52 , 24
4 52 10
94400
- l = d
e
lungimea butucului condus
- h inaltimea canelurii supusa la strivire
- b = 4 latimea canelurii
5.5.4 Verificarea arborilor
Fig 5.2 Schema de ncrcare a arborilor
Fig. 5.3 Diagrama de eforturi
42
5.5.4.1 Verificarea la solicitare compusa
Verificarea la solicitare compus const n determinarea tensiunii echivalente maxime, n
seciuniile periculoase ale arborilor.
aIII
i
i
echiv
W
M
o o s =
Unde:
echiv
o -tensiunea echivalent
i
M -momentul de ncovoiere echivalent din seciune
i
W - modulul de rezisten la ncovoiere al seciunii arborelui cu moment de ncovoiere
echivalent
i
M
aIII
o -rezistena admisibil la ncovoiere pentru calculul alternat-simetric
2 2
t irez i
M M M + = o
2 2
iH iV irez
M M M + =
Pentru arborele primar verificarea se va face n zona de trecere de la arbore la roata dinata:
Nmm M M M
iH iV irez
124360 101200 72278
2 2 2 2
= + = + =
Nmm M M M
t irez i
178095 127485 124360
2 2 2 2
= + = + = o
3
3
18 , 6283
32
mm
d
W
z
=
=
t
aIII
i
i
echiv
W
M
o o s = = = 34 , 28
18 , 6283
178095
Pentru arborele intermediar verificarea se va face in zona de trecere de la partea filetata la
diametrul de asezare al rotii dintate al angrenajului permanent:
Nmm M M M
iH iV irez
152770 129360 81269
2 2 2 2
= + = + =
Nmm M M M
t irez i
571951 551171 152770
2 2 2 2
= + = + = o
3
3
26961
32
mm
d
W
z
=
=
t
aIII
i
i
echiv
W
M
o o s = = = 24 , 21
26961
571951
Pentru arborele secundar verificarea se va face in zona de trecere de la caneluri la
diametrul arborelui pe care se monteaza roata pentru mers inapoi:
Nmm M M M
iH iV irez
104858 93451 47563
2 2 2 2
= + = + =
Nmm M M M
t irez i
486565 475132 104858
2 2 2 2
= + = + = o
3
3
26961
32
mm
d
W
z
=
=
t
aIII
i
i
echiv
W
M
o o s = = = 04 , 18
26961
486565
43
5.5.4.2 Calculul coeficientului de siguran global
Determinarea coeficientului de siguran global la solicitri variabile se face pentru
seciunile arborelui, ce prezint concentratori de tensiune.
Coeficientul de siguran global este:
a
c
c c
c c
c s
+
+
=
2 2
t o
t o
unde:
o
c ;
t
c - coeficientul de siguran la solicitarea de ncovoiere, respectiv torsiune
a
c - coeficientul de siguran admisibil (1,3...1,5)
Se va calcula coeficientul de siguranta la invovoiere.
V
K
c
o
c
|
o
o
o
o
=
1
Considerandu-se valorile coeficientilor pentru materialul ales, rezulta:
06 , 10
97 , 9
75 , 0 65 , 0
7 , 1
350
=
=
o
c
Se calculeaza coeficientul de siguranta la torsiune:
c
m V
K
c
t
t
t
t
c
|
o
t
o
+
=
1
1
Rezulta:
28 , 27
300
71 , 1
200
71 , 1
75 , 0 65 , 0
7 , 1
1
=
+
=
t
c
Se calculeaza coeficientul global de siguranta:
2 2
t o
t o
c c
c c
c
+
=
Va rezulta:
5 , 2 41 , 9
28 , 27 26 , 10
28 , 27 06 , 10
2 2
> =
+
= c
44
Capitolul 6 Studiul soluilor constructive posibile pentru puntea fa
Majoritatea puntilor din fata pentru autocamioane sunt punti rigide cu suspensie
dependenta. Toate puntile din fata ale autocamioanelor sunt si punti de directie, deci au in
compunere doua fuzete articulate prin pivotii lor de grinda centrala, pentru a permite bracarea
rotilor. In cazul puntilor din fata motoare sunt prezente mecanismele specifice transmiterii
fluxului de putere, arborii planetari sunt articulati (o articulatie homocinetica in zona pivotului cu
centrul pe axa pivotului), iar fuzetele au axul tubular pentru a permite montarea arborilor
planetari.O particularitate a articulatiei fuzeta-pivot-grinda la autocamioane este asigurarea unor
valori mari pentru unghiul de bracare al rotii (o valoare de 40
0
este uzuala).Puntile din fata ale
autocamioanelor sunt diferentiate prin constructia componentelor principale (fuzete, pivoti,
grinda) si prin sistemul de montare si de ghidare al puntii pe cadru.
O solutie clasica este urmatoarea:
-pivot cilindric blocat in pumnul grinzii cu un surub pana de forma conica, care se aseaza intr-
o frezare din corpul pivotului;
-lagarele dintre pivot si bratele fuzetei, lagare de alunecare (bucse din bronz), etansate spre
grinda cu simeringuri, inchise spre exterior cu capace, unul din acestea (de obicei cel inferior)
prevazut cu niplu de ungere, cu canal de ungere in lungul pivotului;
-incarcarea verticala se transmite de la bratul inferior al fuzetei la grinda printr-un lagar axial
(de obicei rulment axial), iar reglarea jocului axial se face cu saibe de reglaj dispuse intre grinda
si bratul superior al fuzetei;
-levierele sistemului de directie se monteaza pe fuzeta astfel: levierul de comanda al fuzetei
din stanga pe bratul superior al fuzetei, iar levierul trapezului de directie pe bratul inferior;
-butucul rotii se sprijina pe axul fuzetei prin doi rulmenti cu role conice, unul mai mare in
interior si altul mai mic in exterior, strangerea lagarului se face cu piulita crenelata din capatul
axului fuzetei asigurata cu splint;
-un surub asigurat cu contrapiulita este filetat in corpul fuzetei pe interior si serveste la
reglarea bracarii rotii, pumnul grinzii fiind prevazut cu un bosaj de sprijin.
n continuare sunt prezentate diferite soluii constructive pentru puntea fa rigid la
autocamioane.
Fig.6.1 Puntea fa rigid ce echipeaz autocamioanele Volvo
45
Fig.6.2 Soluia pentru puntea fa rigid adoptat la autocamioanele Scania
Fig.6.3 Puntea fa rigid ce echipeaz autocamioanele BMC Professional
Fig.6.4 Diferite soluii constructive pentru puntea fa rigid de direcie ce echipeaz autocamioanele DAF
46
Fig.6.5 Puntea fa rigid de direcie ce echipeaz autocamioanele Iveco Trakker
Fig.6.6 Soluia pentru puntea fa rigid de direcie adoptat la autocamioanele Renault
Fig.6.7 Soluia pentru puntea fa rigid de direcie adoptat la autocamioanele Mitsubishi Fuso
47
O soluie pentru montarea i ghidarea punii din fa prin lacuri lamelare la VOLVO este
prezentat n figura 6.8.
Fig.6.8.Montarea si ghidarea puntii din fata prin arcurile lamelare ale suspensiei (VOLVO)
Daca se foloseste suspensia pneumatica, se adopta solutia de montare si de
ghidare a puntii din fata cu mecanism patrulater cu bare, dispus longitudinal si cu bara
transversala Panhard pentru preluarea fortelor transversale. O astfel de constructie este
prezentata in figura 6.9. Suspensia puntii are cate un amortizor pe fiecare roata si bara
stabilizatoare montata cu partea sa centrala pe grinda puntii si articulata la capete prin bielete
verticale cu lonjeroanele cadrului.
48
Fig.6.9.Montarea si ghidarea puntii din fata cu mecanisme patrulater dispuse longitudinal si cu bara Panhard
(VOLVO); X-cota de reglare a pernei de aer.
In figura 6.10 se prezinta constructia ansamblului fuzeta-pivot-grinda si lagarul rotii
folosit de RENAULT, la care capacele de inchidere ale lagarelor pivotului sunt simple discuri
introduse in alezajele din bratele fuzetei si asigurate cu inele elastice interioare, iar levierele
directiei se monteaza pe bratele fuzetei in gauri conice, sunt asigurate cu pene disc si sunt stranse
cu piulite cu autoasigurare.
Fig.6.10.Ansamblul pivot si lagar roata (RENAULT): A-saiba de reglaj a jocului axial; B-surub de reglare a
bracajului; C-traductor ABS.
49
O constructie asemanatoare foloseste si MERCEDES pe autocamioanele Serie 1948. Fata
de solutia precedenta aceasta are urmatoarele deosebiri: este prevazut un niplu de gresare si
pentru lagarul pivotului superior, montat la capatul unei conducte scurte pentru a usura accesul;
levierele de directie sunt montate prin flanse cu doua suruburi pe bratele fuzetei; configuratia
grinzii este diferita in zonele de capat (acestea sunt drepte si nu arcuite). Aceasta constructie este
prezentata in figura 6.11.
Fig.6.11 Constructia puntii din fata MERCEDES
Fixarea pivotului conic in pumnul grinzi se poate face si prin tragere in sus cu o
piulita filetata pe capatul superior al pivotului. O astfel de solutie, folosita de DAF, este
prezentata in figura 6.12. Piulita exercita forta de tragere asupra pivotului prin intermediul unei
antretoaze montata pe fusul superior al pivotului, care serveste drept inel interior si pentru
rulmentii cu ace ai lagarului superior. Lagarul inferior este tot cu rulmenti cu ace. Fortele
verticale se transmit de la bratul inferior al fuzetei la grinda printr-un lagar axial. Jocul axial
dintre fuzeta si grinda se regleaza cu saibe montate intre bratul superior al fuzetei si grinda.
Capacul inferior de forma unei placi se fixeaza pe bratul fuzetei prin suruburi si contine un niplu
de ungere. Capacul superior are forma de calota, se fixeaza prin suruburi pe bratul fuzetei si
contine un niplu de ungere.
50
Fig.6.12.Lagarele si fixarea pivotului la DAF: 1-saibe de reglaj; 2-capac superior; 3-piulita; 4-pivot cu fixare pe con
in grinda; 5-lagar axial; 6-capac inferior; A-joc axial al pivotului de 0,050,30 mm.
Fixarea pivotului conic in pumnul grinzii prin tragere cu o piulita filetata pe capatul
superior al pivotului permite realizarea unei lagaruiri deosebite a articulatiei dintre fuzeta si
grinda, solutie folosita de VOLVO si prezentata in figura 6.13. Lagarul superior al pivotului este
realizat cu un rulment axial-radial cu role conice, care preia si fortele verticale. Acestea se
transmit pe urmatorul traseu: fusul fuzetei, bratul superior, rulmentul conic, piulita de strangere,
corpul pivotului si prin imbinarea conica a pivotului cu pumnul grinzii la grinda. Piulita exercita
forta de strangere prin intermediul unei antretoaze care constitue si ghidaj pentru inelul interior
al rulmentului conic. Saibele pentru reglajul jocului axial sunt montate intre umarul antretoazei si
inelul interior al rulmentului. Lagarul inferior al pivotului este un lagar simplu de alunecare cu
bucsa din bronz. Sunt prevazute nipluri de ungere pe ambele capace, iar lagarele sunt bine
etansate.
Fig.6.13.Lagarele si fixarea pivotului la VOLVO: 1-antretoaza cu guler; 2-capac superior in forma de calota; 3-saibe
de reglaj; 4-surub pentru reglarea bracarii rotii; A-saibele de reglaj; B-antretoaza cu guler.
51
Capitolul 7 Studiul soluilor constructive posibile pentru suspensia
punii fa
Din studiul soluiilor constructive pentru suspensia punii fa a modelelor similare ale
autocamionului s-a decis ca acesta sa fie echipat cu arcuri lamelare.
Avantajele principale ale arcurilor lamelare sunt:
- indeplinesc singure functiile de element elastic al suspensiei, element de amortizare si
dispozitiv de ghidare al puntii sau al rotii, complect sau numai partial (este dublat de o bara
de reactie);
- are o constructei simpla si ieftina;
- se poate repara cu usurinta.
Ca dezavantaje se mentioneaza:
- masa proprie mare (este cel mai greu element elastic);
- durabilitate redusa (s-a demonstrat experimental ca rezistenta la oboseala a arcului din foi
este de 4 ori mai mica decat a barei de torsiune echivalente; la automobilele obisnuite,
exploatate in conditii bune, durata de functionare este de 100 150 mii de km).
In prezent arcurile in foi se folosesc la autocamioane si la autoutilitare.
Tipuri de arcuri in foi folosite in constructia suspensiei automobilului sunt prezentate in
tabelul 7.1.
Tabelul 7.1.Tipuri de arcuri in foi
52
Constructii reprezentative de suspensii pentru autocamioane cu arcuri in foi sunt
prezentate in figurile 7.1, 7.2 si 7.3.
Fig.7.1.Arc in foi montat in sistem balansier pentru o punte motoare dubla de autocamion: 1-bara de reactie
superioara; 2-bara de reactie inferioara; 3-arc in foi; 4-articulatia centrala a balansierului; 5-carterul puntii motoare;
6-suportul fixat pe carter pentru ghidarea laterala a capatului arcului (arcul preia astfel reactiunile laterale)
53
Fig.7.2.Suspensii cu arcuri cu foi si elemente elastice suplimentare: 1-element elastic suplimentar cu arc din foi; 2-
arcul principal cu foi al suspensiei; 3-tampon limitator de cursa superioara; 4-reazem pentru arcul cu foi
suplimentar; 5-arcuri elicoidale corectoare; 6-prindere elastica cu perne din cauciuc pentru capetele arcului
principal; a-suspensie cu arc suplimentar din foi; b-suspensie cu lamele suplimentare; c-suspensie cu arcuri
elicoidale corectoare (suspensie Gregoire); d-suspensie mixta cu arc lamelar si element pneumatic tip burduf cu
doua camere prevazuta cu bare superioare de reactie
Suspensia cu arcuri elicoidale corectoare care functioneaza in paralel cu arcul lamelar
principal este avantajoasa cand masa suspendata nu variaza in limite largi. Cele doua arcuri
elicoidale legate de un pendul de egalizare anuleaza incovoierea suplimantara a arcului lamelar.
Caracteristica elastica este progresiva, iar loviturile la capat superior de cursa sunt anulate.
Suspensia este prevazuta cu bara stabilizatoare.
Fig.7.3.Suspensie cu arc lamelar nesimetric pentru o autoutilitara: 1-arc lamelar; 2-tampon superior limitator de
cursa; 3-amortizor; 4-arc cav din cauciuc pentru marirea rigiditatii la suprasarcini
Durata de functionare a suspensiei cu arcuri lamelare este influentata in mare
masura de uzura articulatiilor, aceasta fiind de 2 4 ori mai mica decat cea a arcului propriuzis;
se constata tendinta ca articulatiile cu bucse din bronz sa fie inlocuite cu bucse din cauciuc sau
din materiale plastice care nu necesita ungere.
Constructia articulatiilor si a suportilor fixati pe longeroanele cadrului este
prezentata in figura 7.4.
54
Fig.7.4.Constructia articulatiilor pentru arcurile lamelare: a-articulatie elastica cu perne din cauciuc fara
deplasare axiala; b-idem cu deplasare axiala; c-articulatie cu cercel si buce din cauciuc; d-articulatie fixa cu bucse
din cauciuc; e-articulatie fixa cu bucsa metalica; 1-limitator elastic axial; 2-perna din cauciuc; 3-bolt; 4-bucsa din
cauciuc.
Asamblarea pachetului de foi cu bridele intermediare, forma ochiurilor de la capetele
lamelelor si forma capetelor pentru lamelele scurte sunt prezentate in figura 7.5.
a.
b.
c.
Fig.7.5.Solutii constructive pentru arcul lamelar: a-asamblarea foilor prin bridele intermediare; b-ochiurile de
prindere; c-capetele foilor
Arcul cu foi parabolic are grosimea foilor variabila (scade de la mijloc spre capete),
numarul foilor este mult mai mic, iar lungimea lor este egala. Foile nu sunt in contact direct
(intre ele atat la capete cat si la mijloc se monteaza garnituri speciale din materiale plastice), iar
frecarea dintre lamele este eliminata. Efectul acestor solutii constructive este evidentiat in figura
7.6. Cele trei arcuri au aceleasi caracteristici de baza: lungimea 1650 mm, rigiditatea 200 N/mm,
sarcina pe arc 33 kN.
55
Fig.7.6.Comparatie intre solutii constructive de arcuri cu foi.
Variatia rigiditatii arcului in foi (caracteristica elastica progresiva) se poate obtine prin
variatia lungimii de lucru a arcului, adica prin inlocuirea articulatiilor de capat cu reazeme
alunecatoare profilate, preluarea fortelor longitudinale de reactie fiind realizata de foaia
suplimentara 1, asa cum se arata in figura 7.7.
Fig.7.7.Arcul in foi cu rigiditate variabila: a-automobil fara sarcina utila; b-automobil cu sarcina utila; 1-foaie pentru
preluarea fortelor longitudinale; 2-reazem fix profilat
56
Parametrii dimensionali principali pentru arcurile in foi sunt prezentati in figura 7.8
pentru arcul cu foi clasic, arcul cu foi principal cuplat cu un arc cu foi suplimentar, arc cu foi
mixt (ultimile doua foi au grosime variabila).
Fig.7.8.Parametrii dimensionali principali ai arcurilor in foi
57
Capitolul 8 Calculul punii fa a autocamionului
Calculul punii rigide comport: calculul grinzii, calculul fuzetei i calculul pivotului
fuzetei. Dimensionarea elementelor punii rigide se face pe baza ncercrilor din regimul cel mai
defavorabil. Regimurile de calcul ale punii de direcie sunt:
- Regimul frnrii automobilului
- Regimul deraprii automobilului
- Regimul trecerii peste obstacole
Grinda punii nemotoare rigida din fata poate fi executata prin:
- forjare din otel;
- din trei bucati asamblate prin sudura, partea centrala teava din otel trasa pe dorn, iar
partile laterale forjate;
- din tabla din otel debitata corespunzator si asamblata prin sudura, sectiunea
transversala fiind dreptunghiulara.
Cea mai folosita solutie este prima metoda, iar sectiunea transversala este un profil I cu muchiile
rotunjite. Aceasta sectiune este prezentata in figura 6.4, dimensiunea de baza fiind grosimea
inimii profilului a.
Fig.8.1.Sectiunea transversala in I a grinzii forjate.
Modulele de rezistenta ale acestei sectiuni, luand ca dimensiune de baza grosimea inimii
profilului sunt:
3
20 a W
v
= si
3
5 , 5 a W
h
= (8.1)
Se va opta pentru o grosime de mm a 30 = astfel :
3 3
540000 30 20 mm W
v
= = si
3 3
148500 30 5 , 5 mm W
h
= =
58
Schema fortelor care actioneaza asupra grinzii puntii din fata, inclusiv diagramele de
eforturi, pentru regimurile franarii si deraparii este prezentata in figura 8.2.
Fig.8.2.Modelul de calcul al puntii din fata rigide, inclusiv diagramele de eforturi: 1-regimul franarii; 2-regimul
deraparii.
8.1 Calculul grinzii punii din fa
a. Regimul frnri autocamionului.
n figura 8.2 se prezint forele ce acioneaz asupra punii din fa n regimul frnrii
autocamionului i anume:
1 1
G m
f
- ncrcarea dinamic ce revine punii din fa n timpul frnrii;
1
Z i
2
Z - reaciunile normale ale cii asupra roilor;
1 f
F i
2 f
F - reaciunile tangeniale ale cii asupra roilor datorit momentului de frecare
f
M
Reaciunile
1
Z i
2
Z solicit puntea la ncovoiere n plan vertical. Seciunea periculoas
este a a , n care momentul ncovoietor are valoarea:
l
G
m l Z l Z M
f d s iV
= = =
2
1
1 1 1
(8.2)
mm daN M
iV
= = 2185190 400
2
25 , 7804
4 , 1
n care:
f
m
1
- coeficient de ncrcare dinamic la frnare i are valoarea 1,4 - 1,6 pentru
autocamioane i autobuze.
Solicitarea de ncovoiere n plan vertical este dat de relaia:
iV
iV
iV
W
M
= o (8.3)
59
n care:
iV
W este modulul de rezisten la ncovoiere n plan vertical al grinzii cu seciunea n
zona arcurilor.
MPa
iV
46 , 40
540000
2185190
= = o
Considernd valoarea maxim a forei de frnare limitat de aderen se poate scrie
momentul ncovoietor din planul orizontal:
1
1
1
2
l
G
m M
f iH
= (8.4)
mm daN M
iH
= = 2403709 400 1 , 1
2
25 , 7804
4 , 1
Solicitarea corespunztoare este dat de relaia:
iH
iH
iH
W
M
= o (8.5)
n care:
iH
W este modulul de rezisten la ncovoiere n plan orizontal al grinzii cu seciunea n
zona arcurilor.
MPa
iH
86 , 161
148500
2403709
= = o
innd seama c solicitriile
iV
o i
iH
o sunt perpendiculare, solicitarea rezultant la
ncovoiere este dat de relaia:
2 2
iH iV i
o o o + = (8.6)
2 2 2
/ 45 , 3120 86 , 161 46 , 40 cm daN
i
= + = o
Grinda punii din fa este supus la torsiune de ctre momentul:
r f r fd r fs t
r
G
m r F r F M = = =
2
1
1
(8.7)
n care:
r
r este raza de rulare a roiilor din fa
mm daN M
t
= = 61 , 3034682 505 1 , 1
2
25 , 7804
4 , 1
Solicitarea corespunztoare la torsiune este dat de relaia:
t
t
t
W
M
= t (8.8)
n care:
t
W este modulul de rezisten la torsiune
2
/ 23 , 1554
540000
61 , 3034682
cm daN
t
= = t
Efortul unitar admis la ncovoiere este
2
/ 4000 3500 cm daN
ai
= o , iar efortul unitar
admis la torsiune este
2
/ 3000 2500 cm daN
at
= t
60
b. Regimul deraprii automobilului.
Forele ce acioneaz asupra punii din fa n acest caz sunt prezentate n figura 8.3. n
acest caz momentul de frnare se consider nul, n schimb apare fora centrifug
1 c
F i
reaciunile transversale ale cii
s
Y
1
i
d
Y
1
asupra roii din stnga respectiv din dreapta.
Fig 8.3 Forele care acioneaz asupra punii din fa n regimul deraprii autovehiculului
Grinda punii va fi solicitat numai la ncovoiere de ctre momentele ncovoietoare,
datorate reaciunilor normale
s
Z
1
i
d
Z
1
i reaciunilor transversale
s
Y
1
i
d
Y
1
, ambele n planul
vertical. La mersul n viraj reaciunile normale
s
Z
1
i
d
Z
1
nu mai sunt egale ca la mersul n linie
dreapt datorit apariiei forei centrifuge
1 c
F . Din ecuaia de momente n raport cu punctele de
contact ale roii cu calea de rulare rezult urmtoarele valori pentru reaciunile normale:
B
h
F
G
m Z
g
c s
+ =
1
1
1 1
2
(8.9)
B
h
F
G
m Z
g
c d
=
1
1
1 1
2
(8.10)
Considernd valoarea maxim a forei centrifuge
1 c
F limitat de aderen (regimul
deraprii automobilului), i 1
1
= m (deoarece 0 =
f
F ):
1 1
G F
c
= (8.11)
Deci relaiile 8.11 i 8.12 devin:
|
|
.
|
\
|
+ =
B
h
G
Z
g
s
2 1
2
1
1
(8.12)
|
|
.
|
\
|
+ =
B
h
G
Z
g
d
2 1
2
1
1
(8.13)
daN Z
s
17 , 10489
1810
82 , 1388
1 , 1 2 1
2
25 , 7804
1
=
|
.
|
\
|
+ =
daN Z
d
17 , 10489
1810
82 , 1388
1 , 1 2 1
2
25 , 7804
1
=
|
.
|
\
|
+ =
61
Se observ c dac fora centrifug
1 c
F are senul din figur, reaciunea
s
Z
1
va fi mai
mare dect
d
Z
1
, deci seciunea periculoas va fi a a dinspre roata din stnga. Momentul
ncovoietor datorit reaciunii
s
Z
1
este dat de relaia:
l
B
h
G
l Z M
g
s iz
|
|
.
|
\
|
+ = = 2 1
2
1
1
(8.14)
mm daN M
iz
=
|
.
|
\
|
+ = 73 , 4195671 400
1810
82 , 1388
1 , 1 2 1
2
25 , 7804
Momentul ncovoietor datorat reaciunii
s
Y
1
este dat de relaia:
r
g
r s iy
r
B
h
G
r Y M
|
|
.
|
\
|
+ = = 2 1
2
1
1
(8.15)
mm daN M
iy
=
|
.
|
\
|
+ = 12 , 5826739 505 1 , 1
1810
82 , 1388
1 , 1 2 1
2
25 , 7804
Datorit faptului c cele dou momente ncovoietoare sunt n acelai plan, momentul
ncovoietor rezultant va fi:
iy iz i
M M M = (8.16)
mm daN M
i
= = 39 , 1631067 12 , 5826739 73 , 4195671
iar solicitarea corespunztoare:
iV
i
i
W
M
= o
2
/ 49 , 3020
540000
39 , 1631067
cm daN
i
= = o
n acest caz solicitarea maxim admisibil este
2
/ 3500 3000 cm daN
ai
= o
c. Regimul trecerii peste obstacole
n cadrul acestui regim grinda este solicitat la ncovoiere n planul vertical de momentul:
l
G
c M
d iV
=
2
1
(8.17)
n care:
d
c este coeficientul de ncrcare dinamic a punii din fa la trecerea peste obstacole (
2 ~
d
c ).
mm daN M
iV
= = 3121700 400
2
25 , 7804
2
2
/ 09 , 2578
540000
3121700
cm daN
W
M
iV
i
i
= = = o
n cadrul regimului trecerii peste obstacole efortul unitar admis la ncovoiere este cuprins
ntre limitele
2
/ 3500 3000 cm daN
ai
= o .
n tabelul 8.1 se prezint parametrii principali ai puniilor din fa rigide ale
autocamionelor, confor cu seria tip C.A.E.R.
62
Tab 8.1 Parametrii constructivi ai puniilor din fa rigide
Se va opta ca dimensiuniile punii s fie cele ale puntii ce echipeaza autocamioanele
Mercedes.
In figura 8.4 se prezinta parametrii dimensionali principali ai grinzii puntii din fata VL 4,
care echipeaza unele autocamioane Mercedes.
Tabelul 8.2.Parametrii dimensionali ai grinzii puntii VL 4
Dimensiune[mm] A B C D E F G
Grinda VL 4 17500,5 100 844 49,955 la 49,971 89-0,2 100 5
0
20
Fig 8.4.Grinda puntii VL 4 (Mercedes).
63
8.2 Calculul fuzetei
Fuzeta se calculeaz de asemenea considernd automobilul n cele trei regimuri
caracteristice. n figura 8.4 se prezint forele care acioneaz asupra fuzetei, iar seciunea
periculoas se consider b b (zona de racordare a axului cu corpul fuzetei). Distanele
recomandate ntre cei doi rulmeni ai roii din fa sunt date n tabelul 8.2.
Fig 8.5.Modelul de calcul pentru fuzeta si pivot
Tab 8.3Distanele recomandate pentru cei doi rulmeni ai roii din fa, n funcie de sarcina vertical ce revine roii
Se va opta pentru o distant ntre rulmenti de 75mm.
a. Regimul frnrii.
n cazul frnrii automobilului asupra roii i deci asupra fuzetei acioneaz forele
s
Z
1
i
fs
F determinate la calculul grinzii punii.
n acest caz momentul ncovoietor rezultant n seciunea b b este dat de relaia:
2 2
1 1 fs s i
F Z l M + = (8.20)
mm daN M
i
= + = 62 , 341749 23 , 13489 17 , 10489 20
2 2
Iar efortul unitar la ncovoiere:
3
1 , 0 d
M
i
i
= o
2
3
/ 56 , 1751
58 1 , 0
62 , 341749
cm daN
i
=
= o (8.21)
unde d este diametrul axului fuzetei n seciunea periculoas.
64
b. Regimul deraprii
La derapare cele dou fuzete sunt solicitate diferit. Momentele de ncovoiere rezultante n
planul vertical, datorit forelor
s
Z
1
,
d
Z
1
,
s
Y
1
i
d
Y
1
, vor fi:
r s s is
r Y Z l M =
1 1 1
(8.22)
r d d id
r Y Z l M =
1 1 1
(8.23)
Unde
s
Z
1
,
d
Z
1
se calculeaz cu relaiile 8.14 , 8.15 iar =
s s
Z Y
1 1
, iar =
d d
Z Y
1 1
.
mm daN M
is
= = 94 , 1631065 505 1 , 1 17 , 10489 17 , 10489 400
mm daN M
id
= = 94 , 1631065 505 1 , 1 17 , 10489 17 , 10489 400
Solitriile la ncovoiere pentru cele dou fuzete vor fi date de relaiile:
3
1 , 0 d
M
is
is
= o i
3
1 , 0 d
M
id
id
= o (8.24)
2
3
/ 96 , 835
58 1 , 0
94 , 1631065
cm daN
is
=
= o
2
3
/ 96 , 835
58 1 , 0
94 , 1631065
cm daN
id
=
= o
c. Regimul trecerii peste obstacole
Momentul ncovoietor n planul vertical este dat de relaia:
1
1
2
l
G
c M
d i
= (8.25)
Iar efortul unitar:
1 1
3
2 , 0
l G
d
c
d
i
= o (8.26)
Pentru materialele din care se confecioneaz fuzetele, efortul unitar admisibil la ncovoiere este
de
2
/ 4500 cm daN
ai
= o .
In figura 8.6 sunt prezentati parametrii dimensionali principali pentru fuzeta aceleiasi punti.
Tabelul 8.4.Parametrii dimensionali ai fuzetei puntii VL 4
Dimensiune[mm] A B C D E F Faux
rond
Fuzeta VL 4 57,961la
57,991
5
0
20
113 69,881 la
70,00
49,975 la
49,991
202 max.0,04
Fig 8.6.Fuzeta puntii VL 4 (Mercedes).
65
8.3 Calculul pivotului fuzetei
n figura 8.5 se prezint forele ce acioneaz asupra furcii i a pivotului fuzetei, fr a se
tine seama de unghiurile roilor de direcie i a pivoilor. Furca i pivotul fuzetei se
dimensioneaz pe baza presiunii specifice care ia natere ntre ele.
Fig 8.5 Schema de calcul a pivotului fuzetei
a. Regimul frnrii
Reaciunea normal a cii provoac n reazemele pivotului forele
1
F . Din condiia de
echilibru a pivotului rezult:
5
4 1
1
5
4
1 1
2 l
l G
m
l
l
Z F
f s
= = (8.27)
daN F 72 , 5828
200
250
2
25 , 7804
4 , 1
1
= =
Fora de frnare
fs
F d natere ntre braele furcii i pivot la dou fore
2
F i
3
F , date de
relaiile:
5
7 1
1
5
7
2
2 l
l G
m
l
l
F F
f fs
= = (8.28)
5
6 1
1
5
6
3
2 l
l G
m
l
l
F F
f fs
= = (8.29)
Momentul de torsiune produs de fora de frnare
fs
F d natere ntre braele furcii i pivot
la forele
4
F , date de relaia:
66
5
1
1
5
4
2 l
r G
m
l
r
F F
r
f
r
fs
= = (8.30)
Fora de frnare
fs
F , acionnd asupra fuzetei la distana
4
l de pivot, tinde s-o roteasc n
jurul acestuia cu momentul
4
l F
fs
. Fuzeta este reinut de fora R care apare n bara transversal
de direcie i care are valoarea:
10
4 1
1
10
4
2 l
l G
m
l
l
F R
f fs
= = (8.31)
Aceast for d natere ntre pivot i fuzet la forele
5
F i
6
F , date de relaiile:
5
7 1
1
5
7
5
2 l
l G
m
l
l
R F
f
= = (8.32)
5
6 1
1
5
6
6
2 l
l G
m
l
l
R F
f
= = (8.33)
Ca rezultat al acestor fore, ntre braele furcii i pivot va aciona la partea superioar
rezultanta
s
R , iar la partea inferioar
i
R , date de relaiile:
( ) ( )
2
4 2
2
5 1
F F F F R
s
+ = (8.34)
( ) ( )
2
4 3
2
5 1
F F F F R
i
+ + + = (8.35)
Presiunile specifice ntre braele furcii i pivot la partea superioar, ct i la partea
inferioar sunt date de relaiile:
2
d l
R
p
s
s
s
= (8.36)
2
d l
R
p
s
i
i
= (8.37)
Aceste presiuni nu trebuie s depeasc
2
/ 300 cm daN . Pivotul se calculeaz de
asemenea la ncovoiere i la forfecare sub aciunea forelor rezultante
s
R i
i
R . Eforturile
unitare admisibile pentru pivoii confecionai din oeluri aliate sunt:
2
/ 4000 cm daN
ai
= o i
2
/ 500 cm daN
af
= t .
b. Regimul deraprii.
Reaciunea transversal
s
Y
1
, d natere n braele furcii la forele
7
F i
8
F , care se
determin din condiiile de echilibru ale pivotului cu relaiile:
5
7
1 7
l
l
Y F
s
= (8.38)
5
6
1 8
l
l
Y F
s
= (8.39)
Momentul
r s
r Y
1
creaz n braele furcii reaciuniile
9
F , date de relaiile:
5
1 9
l
r
Y F
r
s
= (8.40)
n acest regim
f
F se consider nul i ca urmare
2
F ,
3
F ,
4
F ,
5
F i
6
F sunt nule.
Forele rezultante din braele furcii vor fi date de relaiile:
9 7 1
F F F R
s
+ = (8.41)
67
9 8 1
F F F R
i
= (8.42)
Cunoscnd forele rezultante se pot determina presiunile specifice
s
p i
i
p .
c. Regimul trecerii peste obstacole
n cazul acestui regim pivotul este solicitat numai la forele
1
F date de relaia:
5
4 1
1
2 l
l G
c F
d
= (8.43)
Pivotul are diametrul de baza de 50 mm, iar din considerente de montaj este executat in
trepte astfel:
partea superioara: 51,002 la 51,013 mm;
partea centrala: 50,302 la 50,313 mm;
partea inferioara: 50,002 la 50,013 mm.
Pivotul este fixat in pumnul grinzii prin strangere.
Lagarele dintre pivot si bratele fuzetei sunt lagare de alunecare.
68
Capitolul 9 Calculul i proiectarea suspensiei punii fa
9.1 Calculul arcurilor cu foi
Relatiile pentru determinarea sarcinilor si a tensiunilor din arcurile cu foi sunt in tabelul 9.1.
Tabelul 9.1.Calculul arcurilor cu foi
Relatiile de mai sus se complecteaza cu indicatiile din [3], iar o metoda complecta de
calcul este data in lucrarile: Arcuri si inele Culegere de standarde comentate, Bucuresti, 1999,
respectiv standardele STAS 9943-81, STAS E 12782-90 (ultimul are si exemple de calcul) si
Ponomariov, S.A. s.a. Calculul de rezistenta in constructia de masini, vol.1, Ed. Tehnica,
Bucuresti, 1964.
Se opteaza pentru cazul in care arcul preia atat fortele cat si momentele reactive. Se alege pentru
coeficientul dinamic o valoare de 2,7.
a) Regimul de demararii:
daN
d
k
G
r
Z 74 , 10535 7 , 2
2
7804,25
2
1
= = =
daN
d
k
G
r
F
d
X 31 , 11589 1 , 1 7 , 2
2
7804,25
2
1
= = = =
daN
l
b l
d
k
G
A
R 25 , 11481
1950
1 , 1 1250 750
7 , 2
2
25 , 7804
2
1 2
=
+
=
+
=
daN
l
b l
d
k
G
B
R 58 , 13912
1950
1 , 1 1250 1200
7 , 2
2
25 , 7804
2
1 1
=
=
=
69
b) Regimul de demararii:
daN
d
k
G
r
Z 74 , 10535 7 , 2
2
7804,25
2
1
= = =
daN
d
k
G
r
F
d
X 31 , 11589 1 , 1 7 , 2
2
7804,25
2
1
= = = =
daN
l
b l
d
k
G
A
R 75 , 13452
1950
1 , 1 1250 750
7 , 2
2
25 , 7804
2
1 2
=
=
=
daN
l
b l
d
k
G
B
R 22 , 14585
1950
1 , 1 1250 1200
7 , 2
2
25 , 7804
2
1 1
=
+
=
=
9.2 Calculul elementelor de amortizare ale suspensiei
Pentru elementele de amortizare se vor folosi amortizoare monotubulare cu gaz la inalta
presiune. Acest amortizor a debutat in anii 1950 si compenseaza doua dezavantaje majore ale
amortizorului monotubular pur hidraulic folosit in acea epoca:
- dificultatea diferentierii amortizarii in cursele de comprimare si de destindere;
- o sensibilitate excesiva la fenomenul de emulsie.
El consta dintr-un tub unic separat in doua compartimente de un piston separator perfect
etansat; compartimentul superior este umplut cu ulei, iar cel inferior cu azot la presiune inalta
(25...30 bar). Compartimentul cu gaz compenseaza variatia de volum in urma miscarii tijei piston
prin deplasarea pistonului separator in functie de cantitatea de ulei refulat. Presiunea mare este
necasara: pentru a realiza fortele de amortizare si la comprimare; asigura functionarea precisa a
supapelor si la curse reduse; impiedica formarea de bule (fenomenul de cavitatie) la viteze mari
ale pistonului. Pistonul de lucru echipat cu supape diferentiale, lucreaza in compartimentul cu
ulei si realizeaza modularea fortei de amortizare la comprimare si la destindere.
Schema constructiva, functionarea in cursa de destindere si de comprimare si constructia
acestui amortizor sunt prezentate in figura 9.1.
70
a. b. c. d.
Fig 9.1.Amortizorul monotubular cu gaz de inalta presiune: a)schema constructiva: 1-piasa superioara de inchidere
cu dispozitiv de etansare si de ghidare a tijei; 2-pistonul de lucru cu blocul de supape; 3-camera cu ulei; 4-pistonul
separator; 5-camera cu gaz; b)functionare la destindere; c)functionare la comprimare; d)constructie
Modul de functionare al pistonului de lucru in camera cu ulei este similar celui de la
amortizorul pur hidraulic. Diferenta esentiala este pentru procesul de compensare al volumului
de ulei determinat de variatia de volum imersat a tijei, care se realizeaza prin variatia rapida a
volumului de gaz.
Avantajele acestui amortizor sunt:
- presiunea exercitata de gaz elimina complect riscul de cavitatie si contribuie la un raspuns
instantaneu la solicitarile tranzitorii;
- camera de lucru nu este separata de mediul ambiant prin al doilea tub, caldura este mai usor
evacuata, iar regimul termic este mai coborat;
- functionarea este mai silentioasa.
Dezavantajele sunt:
- fabricare mai complicata (etansare si supape);
- lungime de montaj mai mare datorita camerei de gaz dispusa in prelungirea camerei de
lucru;
71
Calculul amortizorului implica urmatoarele etape:
1) Determinarea caracteristicii de amortizare la roata automobilului
Pentru determinarea caracteristicii de amortizare trebuie sa se stabileasca domeniul
necesar de amortizare pentru caroserie si pentru roti. Acesta se determina cu relatia caracteristicii
liniare de amortizare:
p a
v c F = (9.1)
Coeficientul de rezistenta al amortizorului se determina in functie de gradul de
amortizare D. In cazul domeniului necesar de amortizare pentru caroserie, coeficientul c se
determina cu relatia:
2
2 m k D c
s
= (9.2)
unde: k
s
este rigiditatea suspensiei; m
2
este masa suspendata pentru automobilul gol si pentru
automobilul complect incarcat; D=0,25.
Rezulta astfel dreptele 1 si 2 care delimiteaza domeniul necesar de amortizare A
1
pentru
caroserie din figura 9.2.
Domeniul necesar de amortizare pentru roata A
2
este cuprins intre dreptele 3 si 4
(fig.7.36), corespunzatoare gradului de amortizare D
=0,25 si D
=0,35; coeficientul de amortizare
se determina cu relatia:
( )
1
'
2 m k k D c
p s
+ = (9.3)
unde: k
p
este rigiditatea pneurilor; m
1
este masa nesuspendata.
Fig 9.3 Domeniile necesare de amortizare pentru caroserie A
1
si pentru roti A
2
Domeniile necesare de amortizare fiind distantate intre ele, va trebui sa se adopte o
caracteristica de amortizare care sa constitue un compromis. Ea trebuie sa cuprinda domeniul
necesar de amortizare pentru caroserie pana la v
p
=0,5 m/s (corespunde unor amplitudini de
40....50 mm ale oscilatiilor si unor frecvente proprii
0
=0,7....1,7 Hz) si domeniul necesar de
amortizare pentru roti pana la v
p
=0,7 m/s (corespunde unor amplitudini de 10....20 mm ale
oscilatiilor si unor frecvente proprii de
0
=9....13 Hz). Aceste conditii sunt satisfacute de curba 5
care reprezinta o caracteristica patratica de amortizare, complectata de curba 6 ce corespunde
utilizarii supapelor de descarcare. Aceste curbe se pot trasa cu relatia:
72
2
1 p a
v c F = (9.4)
unde: c
1
=1,5c/v
cr
; v
cr
=0,2....0,4 m/s.
Coeficientii de rezistenta pentru cursa de destindere si de comprimare sunt dati in tabelele
9.2 si 9.3.
Tabelul 9.2. Valori medii pentru coeficientul de rezistenta al amortizorului cu supapele inchise [N.s/m]
Tabelul 9.3. Valori medii pentru coeficientul de rezistenta al amortizorului cu supapele deschise [N.s/m]
Valorile alese din tabele pentru coeficientii de rezistenta ai amortizorului se coreleaza cu
valorile calculate cu relatiile (9.2) si (9.3).
Se calculeaza conform (9.2) 1203 804 7200 5 , 0 = =
gol
c ; 1590 1405 7200 5 , 0 = =
incarcat
c .Se
pot trasa dreptele 1 si 2 conform fig 9.4.
73
Fig 9.4 Domeniul de amortizare pentru caroserie
Se calculeaza conform (9.3) 1399 201 39000 5 , 0
25 , 0
= =
= D
c ; 1960 201 39000 7 , 0
35 , 0
= =
= D
c .
Se pot trasa dreptele 3 si 4.
Fig 9.5 Domeniul de amortizare pentru caroserie si roata
74
2)
Determinarea caracteristicii efective de amortizare (apartine amortizorului)
Determinarea caracteristicii efective de amortizare tine cont de dispunerea amortizorului
pe punte si depinde de constructia puntii si de legaturile dintre punte (roti) cu masa suspendata
(caroserie sau cadru). In figura 9.6 sunt prezentate doua scheme de montaj ale amortizorului,
pentru o punte rigida cu suspensie dependenta si pentru o punte fractionata cu mecanism
patrulater transversal cu suspensie independenta. Amortizorul se monteaza imclinat fata de
verticala cu unghiul .
In cazul puntii fractionate cu suspensie independenta, daca se noteaza cu i=l/l
1
raportul de
transmitere pentru dispunerea amortizorului se obtin urmatoarele relatii de transformare:
Fig 9.6 Dispunerea amortizorului pentru puntes rigida cu suspensie dependenta
| cos
i
F F
R a
= ;
i
v v
R p
| cos
= ;
|
2
2
cos
i
c c
R
= (9.5)
3) Prinderea amortizorului
Calculul prinderii amortizorului depinde de solutia constructiva adoptata pentru
prinderea amortizorului pe punte si pe caroserie. Cele mai uzuale solutii de prindere a
amortizorului sunt prezentate in figura 9.7.
Prinderile amortizorului sunt articulatii elastice axiale oscilante sau cilindrice cu
elemente din cauciuc avand rol de transmitere a fortei de amortizare la elementele puntii si la
caroserie si de filtrare a vibratiilor, indeosebi vibratiile spre caroserie. Ele sunt livrate impreuna
cu amortizorul (sunt executate de fabricantul de amortizoare) si sunt alese de catre inginerul
automobilist in functie de constructia amortizorului, de tipul puntii, de deplasarile unghiulare
posibile ale amortizorului fata de elementele de care se prinde.
In functie de solutia de prindere adoptata pentru amortizor se proiecteaza suportii
de pe punte si de pe caroserie.
FFFFFFF
75
Fig.9.7.Solutii constructive pentru prinderea amortizorului
5) Cursele pistonului amortizorului la destinderea si la comprimarea arcului
Se determina in functie de pozitia de montaj a amortizorului si de cinematica puntii.
Amortizoarele sunt proiectate si construite de firme specializate. In consecinta amortizorul se
alege din gama de produse ale diferitilor fabricanti in functie de parametrii determinati mai sus.
76
Bibliografie
[1] Tabacu, I., Transmisii mecanice pentru autoturisme, Editura Tehnica, Bucureti, 1999
[2] Frail, Gh., Calculul i Construcia Autovehiculelor, Editura Didactic i Pedagogica,
Bucureti, 1977
[3] DASCALESCU , D., Dinamica automobilelor rutiere, Editura Politehnium, Iai, 2005
[4] Stoicescu, P., Proiectarea performanelor de traciune i de consum ale autovehiculelor,
Editura Tehnica, Bucureti, 2007
[5] Tabacu, S., Tabacu, I., Macarie, T., Neagu, E., Dinamica Autovehiculelor- ndrumar de
proiectare, Editura Universitii din Piteti, 2004
[6] Mateescu, V., Sisteme de frnare, direcie i suspensie- Notie de curs, 2012
[7] Mateescu, V, Voloac, ., Sisteme de frnare, direcie i suspensie- Puni i suspensii,
Editura Politehnica Press, Bucureti, 2012
[8] Mateescu, V, Popa, L., Performanele automobilelor, Editura Printech, Bucureti, 2009
S-ar putea să vă placă și
- Arta Seductiei - Planul Tau de ActiuneDocument63 paginiArta Seductiei - Planul Tau de Actiunezmeul86% (36)
- Procesul Autopropulsarii AutovehicululuiDocument18 paginiProcesul Autopropulsarii AutovehicululuibdanutiuÎncă nu există evaluări
- Calcul Dinamic AutocamionDocument42 paginiCalcul Dinamic AutocamionGiorgiana Manea100% (2)
- Albert Einstein-Postulatele Lui EinsteinDocument2 paginiAlbert Einstein-Postulatele Lui EinsteinMarius Boboc67% (3)
- Calculul Si Constructia Motoarelor Cu Ardere InternaDocument171 paginiCalculul Si Constructia Motoarelor Cu Ardere InternaPierre LandryÎncă nu există evaluări
- Proiect Din Dinamica AutovehiculelorDocument29 paginiProiect Din Dinamica AutovehiculelorBogdan PuiaÎncă nu există evaluări
- Influenta Pouluatilor Aerului Asupra Mediului Si Modul de Combatere A AcestoraDocument35 paginiInfluenta Pouluatilor Aerului Asupra Mediului Si Modul de Combatere A Acestoradan_4_stoneÎncă nu există evaluări
- Influenta Pouluatilor Aerului Asupra Mediului Si Modul de Combatere A AcestoraDocument35 paginiInfluenta Pouluatilor Aerului Asupra Mediului Si Modul de Combatere A Acestoradan_4_stoneÎncă nu există evaluări
- Proiect La Dinamica Autovehiculelor - 4X4 MASDocument30 paginiProiect La Dinamica Autovehiculelor - 4X4 MASZodila Dragos Mihai50% (4)
- Proiect OM2Document33 paginiProiect OM2heattrickÎncă nu există evaluări
- Transmisie Mecanica Formata Dintr-O Transmisie Prin Curele Trapezoidale, Un Reductor Cu Roti Dintate, Cu Doua Trepte de ReducereDocument50 paginiTransmisie Mecanica Formata Dintr-O Transmisie Prin Curele Trapezoidale, Un Reductor Cu Roti Dintate, Cu Doua Trepte de ReducereCăpăţină Marius CătălinÎncă nu există evaluări
- Proiect Tractoare 1175 MILITARU FinalDocument23 paginiProiect Tractoare 1175 MILITARU FinalVlad MilitaruÎncă nu există evaluări
- Cap 2. Actionarea Electrica A Podurilor RulanteDocument12 paginiCap 2. Actionarea Electrica A Podurilor RulanteAnonymous myNGYsnkcnÎncă nu există evaluări
- Actionarea Pneumatica A Robotilor Industriali ProiectDocument15 paginiActionarea Pneumatica A Robotilor Industriali ProiectheattrickÎncă nu există evaluări
- Proiect La Dinamica AutovehiculelorDocument32 paginiProiect La Dinamica AutovehiculelorionutÎncă nu există evaluări
- Proiect Auto 2Document97 paginiProiect Auto 2Andrei Cristian Gheorghe100% (1)
- Proiect Mecanisme Anul II TCMDocument15 paginiProiect Mecanisme Anul II TCMAIex Rotari100% (1)
- Mecanismul de Actionare A Conveierului SuspendatlDocument30 paginiMecanismul de Actionare A Conveierului SuspendatlPavel Musurivschi100% (2)
- Calculul Surubului Cu BileDocument7 paginiCalculul Surubului Cu BileComan ovidiuÎncă nu există evaluări
- Metodologie de Proiectare A Transmisiilor Prin LantDocument14 paginiMetodologie de Proiectare A Transmisiilor Prin LantTorr AndreiÎncă nu există evaluări
- Masini-Unelte Curs5Document12 paginiMasini-Unelte Curs5Marius MădăraşÎncă nu există evaluări
- Proiect: Actionari ElectriceDocument27 paginiProiect: Actionari ElectriceLaurentiu OchirosiÎncă nu există evaluări
- Proiect MU2 MSCDocument25 paginiProiect MU2 MSCMalina CiobanuÎncă nu există evaluări
- Mecanismul de Actionare A Malaxorului VerticalDocument31 paginiMecanismul de Actionare A Malaxorului VerticalPavel Musurivschi100% (1)
- Proiect MU2Document29 paginiProiect MU2Malina CiobanuÎncă nu există evaluări
- Problemar 'Bazele Proiectarii Utilajului Tehnologic'Document107 paginiProblemar 'Bazele Proiectarii Utilajului Tehnologic'eugeniu.ciobanuÎncă nu există evaluări
- Proiect Transmisii Pentru AutovehiculeDocument25 paginiProiect Transmisii Pentru AutovehiculeAndrei Uta100% (3)
- Calculul Si Constructia Puntii Motoare SpateDocument30 paginiCalculul Si Constructia Puntii Motoare SpatePaula Draghiciu100% (3)
- Memoriu de CalculDocument32 paginiMemoriu de CalculConstantin CecanÎncă nu există evaluări
- Cutie de VitezeDocument24 paginiCutie de VitezeOliviu BogdanÎncă nu există evaluări
- Proiect CCAR 1Document68 paginiProiect CCAR 1Andrei DontuÎncă nu există evaluări
- Proiect REDUCTOR ConicDocument39 paginiProiect REDUCTOR ConicPopa IoanaÎncă nu există evaluări
- Proiect CCAR 1Document55 paginiProiect CCAR 1Timciuc IacobÎncă nu există evaluări
- Proiectare Schimbator de Viteze, Puntea Si Suspensia Fata Pentru Un AutomobilDocument114 paginiProiectare Schimbator de Viteze, Puntea Si Suspensia Fata Pentru Un AutomobilVlad DumitrasÎncă nu există evaluări
- Biografia MardarescuDocument27 paginiBiografia Mardarescudan_4_stoneÎncă nu există evaluări
- Schimbatorul de VitezeDocument7 paginiSchimbatorul de VitezeCosmin Gabriel MorarescuÎncă nu există evaluări
- Proiectarea Generala Si Functionala A Unui Schimbator de Viteze in Trepte Pentru Un AutomobilDocument76 paginiProiectarea Generala Si Functionala A Unui Schimbator de Viteze in Trepte Pentru Un AutomobilAndreiÎncă nu există evaluări
- WordDocument73 paginiWordNapau AdelinÎncă nu există evaluări
- Proiect Automobile 2Document110 paginiProiect Automobile 2Petrik CrevetelÎncă nu există evaluări
- Auto 2 ProiectDocument25 paginiAuto 2 ProiectDragos EnacheÎncă nu există evaluări
- Dinamica AutovehiculelorDocument16 paginiDinamica AutovehiculelorDani Pb0% (1)
- Automobile Proiect 2Document82 paginiAutomobile Proiect 2Ionel ClipceaÎncă nu există evaluări
- C0zy Transmisii ProjectDocument78 paginiC0zy Transmisii ProjectCosmin MilitaruÎncă nu există evaluări
- Proiect Automobile IIDocument107 paginiProiect Automobile IIEduard Gabriel RadutaÎncă nu există evaluări
- Mecanismul de Actionare A Elevatorului Cu Banda, SarevDocument44 paginiMecanismul de Actionare A Elevatorului Cu Banda, SarevSanduSarevÎncă nu există evaluări
- ColorDocument29 paginiColorSilviu AlecuÎncă nu există evaluări
- Om Proiect BunDocument84 paginiOm Proiect BunMadalina AlexandraÎncă nu există evaluări
- Memoriu de Calcul EDADocument34 paginiMemoriu de Calcul EDAagnes_lorinczÎncă nu există evaluări
- Transmisie Mecanica Cu Reductor CO-CIDocument45 paginiTransmisie Mecanica Cu Reductor CO-CIDorian Cristian VatavuÎncă nu există evaluări
- Proiect - Mecanismul de Actionare A Conveierului Cu LeaganeDocument45 paginiProiect - Mecanismul de Actionare A Conveierului Cu Leaganemihai madalinaÎncă nu există evaluări
- Tema Proiect Automobile IIDocument27 paginiTema Proiect Automobile IIFilip SîrbuÎncă nu există evaluări
- Cutii de Viteze - CalculDocument17 paginiCutii de Viteze - Calculsultanu89Încă nu există evaluări
- Orientarea Şi Fixarea Pieselor În Dispozitivele de FabricareDocument12 paginiOrientarea Şi Fixarea Pieselor În Dispozitivele de FabricareMatei Geanina100% (2)
- Proiect Mecanisme 2005Document41 paginiProiect Mecanisme 2005Abby BurchÎncă nu există evaluări
- Mecanismul de Actionare A Conveierului Cu LEAGANEDocument29 paginiMecanismul de Actionare A Conveierului Cu LEAGANEMishu TriboiÎncă nu există evaluări
- ProiectDocument21 paginiProiectMihalcea AlexÎncă nu există evaluări
- Proiect - : Vehicule Hibride Și Sisteme de Propulsie NeconvenționaleDocument20 paginiProiect - : Vehicule Hibride Și Sisteme de Propulsie NeconvenționaleRobert GorieÎncă nu există evaluări
- Elemente de Ecologie Auto Modul2Document21 paginiElemente de Ecologie Auto Modul2Adrian PopaÎncă nu există evaluări
- Albert Einstein-Viata Lui Albert Einstein-S-A Stins O Stea 10Document4 paginiAlbert Einstein-Viata Lui Albert Einstein-S-A Stins O Stea 10Preda MihaelaÎncă nu există evaluări
- Cap3 3LegeaWeibullDocument7 paginiCap3 3LegeaWeibullandreeaoana45Încă nu există evaluări
- Cada de BaieDocument1 paginăCada de Baiedan_4_stoneÎncă nu există evaluări
- Albert Einstein-Testul de InteligentaDocument2 paginiAlbert Einstein-Testul de InteligentaCristina SuciuÎncă nu există evaluări
- Incercari de FiabilitateDocument7 paginiIncercari de FiabilitateCodrin MunteanuÎncă nu există evaluări
- Albert Einstein-Scurt Istoric Al Evenimentelor Premergatoare Teoriei Reletivitatii 06Document10 paginiAlbert Einstein-Scurt Istoric Al Evenimentelor Premergatoare Teoriei Reletivitatii 06dan_4_stoneÎncă nu există evaluări
- Transformatoarele Pentru SuduraDocument5 paginiTransformatoarele Pentru Suduradan_4_stoneÎncă nu există evaluări
- Final Rev Auto 2 - 14 SiteDocument28 paginiFinal Rev Auto 2 - 14 Sitedan_4_stoneÎncă nu există evaluări
- Transformatoarele Pentru SuduraDocument5 paginiTransformatoarele Pentru Suduradan_4_stoneÎncă nu există evaluări
- Plan Invatamant Ingineria Si Protectia Mediului in IndustrieDocument4 paginiPlan Invatamant Ingineria Si Protectia Mediului in Industriedan_4_stoneÎncă nu există evaluări
- Transport DurabilDocument23 paginiTransport Durabildan_4_stoneÎncă nu există evaluări
- Redresor Ep0027 Battery ChargerDocument3 paginiRedresor Ep0027 Battery Chargerdan_4_stone100% (1)
- Comunicare InternDocument21 paginiComunicare Interndan_4_stoneÎncă nu există evaluări
- Comunicare InternDocument21 paginiComunicare Interndan_4_stoneÎncă nu există evaluări