Motorul Sincron
Încărcat de
Uzzy BassMotorul Sincron
Încărcat de
Uzzy BassProiect
Motorul sincron
BIZDOC PETRUTA
1
Cuprins :
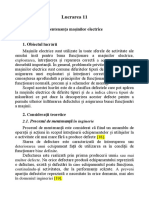
1. Principiul de functionare si ecuatiile otoarelor electrice !
pa".#$%
&. Clasi'carea otoarelor electrice ! pa". ($1)
#. Partile coponente ale otoarelor electrice sincrone ! pa".
11$1*
*. Caracteristica ecanica a otorului sincron ! pa".1+$1,
+. Re"iul de functionare al otoarelor sincrone ! pa". 1-$&)
,. Metode de pornire a otoarelor sincrone!pa".&1$&+
-. [Link] ! pa".&,
%. Bi/lio"a'e ! pa".&-
capitolul I
Principiul de functionare si ecuatiile
otoarelor electrice sincrone
&
Un motor electric (sau electromotor) este un dispozitiv electromecanic ce
transform energia electric n energie mecanic. Transformarea n sens invers, a
energiei mecanice n energie electric, este realizat de un generator electric. Nu
exist diferen e de principiu semnificative ntre cele dou tipuri de ma ini electrice ,
acela i dispozitiv putnd ndeplini ambele roluri n situa ii diferite.
a!oritatea motoarelor electrice func ioneaz pe baza for elor
electromagnetice ce ac ioneaz asupra unui conductor parcurs de curent
electric aflat n cmp magnetic. "xist ns i motoare electrostatice construite pe
baza for ei #oulomb i motoare piezoelectrice.
$n vastul proces de conversie (transformare) a energiei, un loc nsemnat l
ocup conversia electromecanic care se realizeaz cu a!utorul ma%inilor electrice.
&stfel, ma%ina care face conversia energiei mecanice n energie electric se
nume%te generator electric, iar cea care face conversia energiei electrice n energie
mecanic, motor electric. a%ina electric care, cu interven'ia energiei mecanice,
modific parametrii unei transmisiuni de energie electric (tensiune, curent, frecven'
etc) se nume%te convertizor electric rotativ. #nd ma%ina electric prime%te att
energie electric, ct %i energie mecanic %i (e transform n cldura, prin efectul
)oule, ea are rol de frn (fig. *).
Fig. 1 Simbolizarea modurilor de conversie electromecanic:
a-generator(G); b-motor(M); c-convertizor(C); d-rana(F). !-"utere mecanica;
!M# !$-"utere mecanica; !
%M
-"ierderi ireversibile de energie "rin eectul &oule#
"rin recari si "rin ier.
Principiul de funcionare a generatorului
#
Fig. 2 Schia unei seciuni printr-o main electric cu poli
apareni i forma de variaie a induciei in intrefer
+ac rotorul ma%inii sincrone (fig. ,) are nf%urarea de excita'ie alimentat de
la o surs de c.c. %i este antrenat de un motor cu viteza ung-iular ., se formeaz
un cmp nvrtitor de forma care produce printr/o nf%urare de faza fluxul , dat
de rela'ia
0123
2
4cos5
,
t10cos5
,
t. $nf%urrile de faz fiind decalate n spa'iu cu un ung-i
electric de ( radiani),n baza rela'iei
e15
,
23
2
4sin5
,
t15,23
2
4cos
2
2
t
,t.e.m. induse n cele trei nf%urri statorice
de faza sunt6
rel. 1
*
Forma camp invartitor
$n care 51p7, iar "
o
are expresia dat de rela'ia
rel. '
pentru fluxul 0
o
de la func'ionarea n gol.
+ac nf%urarea statoric se conecteaz la o sarcin trifazat de impedan'e
corespunztoare, acestea, ca %i nf%urrile, vor fi parcurse de un sistem trifazat de
curen'i, curentul din faza de referin' avnd forma6
rel. (
Ung-iul de decala! 8 dintre t.e.m. e
9*
%i curentul i
*
depinde de natura sarcinii %i
de parametrii nf%urrii. $n acest caz, ma%ina cedeaz o putere electric sarcinii,
putere preluat prin intermediul cmpului electromagnetic de la motorul primar,
func'ionnd deci n regim de generator.
+
Reacia indusului la maina sincron
:eac'ia indusului are o mare influen' asupra comportrii ma%inii sincrone, nu
ca la ma%ina de c.c. unde influen'a ei este, practic, negli!abil.
$nf%urarea trifazat a statorului, parcurs de sistemul trifazat de curent de
forma celor da'i de rela'ia ;, produce (a rndul ei un cmp nvrtitor de reac'ie care
are aceea%i vitez ung-iular 7 %i acela%i sens de rota'ie ca %i cmpul nvrtitor
inductor , dar decalat in urm, ca %i curentul i
*
, fa' de fluxul care a indus t.e.m. (rel.
*)6
rel. <
+eci, fluxul de reac'ie prin nf%urarea de faz a indusului va fi defazat fa' de
fluxul inductor cu acela%i ung-i, avnd expresia6
rel. =
iar t.e.m. indus de acest flux va fi6
rel >.
#ele dou fluxuri ? inductor 0
9
%i de reac'ie 0
a
? se compun %i dau un flux
rezultant6
rel. @
#are induce o t.e.m. rel. A
&vnd n vedere rela'ia 0123
2
4cos5
,
t10cos5
,
t a lui 0
9
%i rela'ia = a lui 0
a
,
se traseaz n figura B diagramele de fazori corespunztoare pentru o sarcin
rezistiv/inductiv. Cluxul rezultant este decalat n urma fluxului inductor 0
o
cu un
,
ung-i D, numit ung-i intern al ma%inii sincrone %i care n realitate reprezint decala!ul
polilor cmpului nvrtitor rezultant fa' de polii cmpului inductor (polii armturii
rotorice). +iagramele de fazori pentru sarcina rezistiv (8 1 9), sarcin pur inductiv
(8 1 EF,) %i sarcin pur capacitiv (8 1 / EF,), reprezentate n figura >,> conduc la
urmtoarele concluzii6
? fa' de fluxul inductor 0
o
fluxul rezultant 0 din ntrefierul ma%inii este mic%orat n
cazul sarcinilor inductive si mrit n cazul sarcinilor capacitiveG
? ung-iul intern D19 numai cnd ma%ina este ncrcat cu o sarcin pur reactiv.
)iagramele de azori ale lu*urilor +i ale t.e.m. cores"unztoare "entru o
sarcin rezistiv-inductiv.
-
nfluena flu!ului de reacie " asupra flu!ulul re#ultant$ %n funcie
de caracterul sarcinii& a ' sarcin re#istiv ( ' sarcin pur
inductiv)
c ' sarcin pur capacitiv.
*cuaia tensiunior
Hentru o urmrire mai simpl a fenomenelor de baz, ecua'iile se vor deduce
pentru ma%ina sincron cu ntrefier constant (cu polii plini), c-iar dac nu vor fi prinse
unele particularit'i func'ionale specifice ma%inii sincrone cu ntrefier variabil (cu poli
aparen'i).
"cua'ia tensiunior pentru o faz a indusului se determin aplicnd regula
dipolului generator ca %i la rela'iile (
2 2 2 2 2 02 2 2 2 1 1 1 1 1 01 1 1 1
; E I Z E I jX I R U E I Z E I jX I R U = + = = + =
):
rel. B
unde : este rezisten'a nf%urrii de faz, I
J
este reactan'a corespunztoare
fluxului de scpri al nf%urrii respective, iar
E
este dat de relalia A. +ac se are
n vedere c 0
a
este n faz %i propor'ional cu curentul i
*
cum reiese din rela'iile (;)
%i (=), n baza rela'iei > se poate scrie6
rel. *9
unde I
a
este reactan'a corespunztoare fluxului de reac'ie.
#u rela'ia (*9), rela'ia (B) se mai poate scrie6
rel. **
n care I
s
1 I
J
K I
a
este reactan'a sincron a ma%inii.
%
Capitolul ii
Clasi'carea otoarelor electrice
otoarele electrice pot fi clasificate dup tipul curentului electric ce le parcurge6
motoare de curent continuu i motoare de curent alternativ. $n func ie de numrul
fazelor curentului cu care func ioneaz, motoarele electrice pot fi motoare
monofazate sau motoare polifazate (cu mai multe faze).
Motoare de curent continuu
Cunc ioneaz pe baza unui curent ce nu/ i sc-imb sensul, curent continuu. $n
func ie de modul de conectare al nf urrii de excita ie, motoarele de curent
continuu se mpart n patru categorii6
1. Cu e*cita ie deriva ie
'. Cu e*cita ie serie
(. Cu e*cita ie mi*t
,. Cu e*cita ie se"arat
Motoare de curent alternativ
1. Motoare asincrone
Motoare cu inele de contact ( rotorul bobinat)
Motoare cu rotorul -n scurtcircuit
Motoare de ti"uri s"eciale
Motoare cu bare -nalte
Motoare cu dubl colivie )olivo-)obrovols.i
'. Motoare sincrone
a%ina de curent alternativ la care tura'ia rotorului este egal cu cea a
cmpului nvrtitor, indiferent de sarcin, se nume%te ma%ina sincron
asinile electrice sincrone sunt caracterizate prin faptul ca nu au viteza de
rotatie egala cu viteza campului invartitor, de unde si numele de masini electrice
sincrone.
"le pot functiona in regim de motor, in regim de generator sau in regim de
compensator de faza.
otoarele sincrone se folosesc pentru puteri mari de **932, in locul
motoarelor asincrone deoarece desi au o constructie mai simplificata, au avanta!ul ca
pot functiona cu un factor de putere cos 011 sau c2iar capaciti3 4
copensand astfel ener"ia reacti3a consuata de alti receptori din retea.
otorul sincron monofazat este realizat uzual ca motor sincron reactiv cu sau
fr magneti permanenti pe rotor. &semntor motoarelor de inductie monofazate,
(
motoarele sincrone monofazate necesit un cmp magnetic nvrtitor ce poate fi
obtinut fie folosind o faz auxiliar si condensator fie folosind spir n scurtcircuit pe
polii statorici. Le folosesc n general n actionri electrice de puteri mici precum
sistemele de nregistrare si redare a sunetului si imaginii.
asinile sincrone se folosesc in general ca generatoare de curent alternativ,
caz in care sunt denumite generatoare sincrone sau alternatoare. ai sunt utilizate
denumirile de turboalternatoare pentru cazul in care este antrenat de o turbina cu
aburi sau -idroalternatoare cand este antrenata de o turbina -idraulica.
Capitolul iii
1)
Partile coponente ale otoarelor electrice
sincrone
(ndiferent de tipul motorului, acesta este construit din dou prti componente6
stator si rotor. Ltatorul este partea fix a motorului, n general exterioar, ce include
carcasa, bornele de alimentare, armtura feromagnetic statoric si nfsurarea
statoric. :otorul este partea mobil a motorului, plasat de obicei n interior. "ste
format dintr/un ax si o armtur rotoric ce sustine nfsurarea rotoric. $ntre stator si
rotor exist o portiune de aer numit ntrefier ce permite miscarea rotorului fat de
stator. Mrosimea ntrefierului este un indicator important al performantelor motorului.
a%ina de curent alternativ la care tura'ia rotorului este egal cu cea a
cmpului nvrtitor, indiferent de sarcin, se nume%te ma%ina sincron. Ltatorul
motorului sincron este asemntor cu statorul motorului de inductie (este format
dintr/o armtur feromagnetic statoric si o nfsurare trifazat statoric). :otorul
motorului sincron este format dintr/o armtur feromagnetic rotoric si o nfsurare
rotoric de curent continuu. Hot exista dou tipuri constructive de rotoare6 cu poli
necati si cu poli aparenti. :otorul cu poli necati are armtura feromagnetic crestat
spre exterior si n cresttur este plasat nfsurarea rotoric. &cest tip de motor are
uzual o perec-e de poli si functioneaz la turatii mari (;999 rpm la =9 Nz). :otorul cu
poli aparenti are armtura feromagentic sub forma unui butuc poligonal pe care sunt
plasate miezurile polilor rotorici si bobine polare concentrate. $n unele situatii n locul
bobinelor polare concentrate se pot folosi magneti permanenti. otorul sincron cu
poli aparenti are un numr mare de poli si functioneaz la turatii mai reduse. &ccesul
la nfsurarea rotoric se face printr/un sistem inel/perie asemntor motorului de
inductie. otoarele sincrone cu poli aparenti pot avea cuplu c-iar si n lipsa
curentului de excitatie, motorul reactiv fiind cel ce functioneaz pe baza acestui
cuplu, fr nfsurare de excitatie si fr magneti permanenti.
&rmatura inductorului ma%inii este format dintr/o succesiune de poli N %i L,
realiza'i din electromagne'i excita'i c.c. sau din magne'i permanen'i (fig. , ). $n
general, inductorul este rotor %i numai la ma%inile mici, din motive de spa'iu, poate fi
stator, ma%ina fiind considerat n acest caz de construc'ie invers. (nductorul poate
fi cu poli aparen'i %i bobine concentrate a%ezate pe ace%tia (fig. ,) sau cu poli plini
(poli neca'i), cnd nf%urarea de excita'ie este repartizat n crestturi (fig. ;).
$nf%urarea de excita'ie are capetele legate la dou inele de pe arbore, pe care calc
periile care fac legatura cu sursa exterioar de c.c. a%inile sincrone mai au pe
armatura inductoare o nf%urare de tip colivie (#a la ma%inile asincrone) numit
nfurare de amortizare, utilizat %i la pornirea motoarelor (fig. <). #ircuitul
magnetic al inductorului se poate realiza %i din piese masive de o'el, deoarece fluxul
fiind produs de c.c., nu variaz n timp %i nu se produc pierderi.
11
Fig. 2 Schia unei seciuni printr-o main electric cu poli
apareni i forma de variaie a induciei in intrefer
Fig. + Schita de principiu a unei Fig. ,
nfasurarea de masini sincrone cu poliu inecati
amorti#are la o masina cu poli aparenti
&rmatura indusului este format din pac-ete de tole %i n crestturile ei se
gase%te o nf%urare trifazat conectat n stea. Mama larg de puteri, ca %i locul de
utilizare, a condus la numeroase forme constructive ale cror elemente n afara celor
indicate mai nainte , pot diferi de la un tip la altul. &stfel n fig. = se dau unele
elemente specifice ma%inii sincrone
1&
Fig. -..sina sincrona cu poli aparenti /2p012
1-circuit magnetic statoric) 2-carcasa) +-infasurare indusa) ,-
scuturile) --placi de strangerea pachetelor de tole stator)1-
(utucul armaturii rotorice) 3-poli inductori) 4-infasurare e!citatie
5-e!citatoare/masina de c.c cuplata pe acelesi a! care
alimentea#a infasurarea de e!citatie2) 16-ventilatorul
1#
78P9:;<; =
1*
78R879*RS97 .*78>7* 8;* .:9:R<;<
S>7R:>
Masina sincrona este [Link] 5n [Link] din ce 5n ce ai ult 5n
actionarile de putere are si cu 3ite.e relati3 reduse.
Motorul sincron prezinta4 coparati3 cu alte asini4 avantajul ca
nu consua putere reacti3a $ inducti3a din retea4 daca este e6citat
[Link] si4 daca este suprae6citat4 poate de3eni [Link] de putere
reacti3a 5n retea.
Ca dezavantaje sunt:
$ necesitatea curentului continuu aintit pentru alientarea
e6citatiei7
$ posi/ilitatile reduse de odi'care a 3ite.ei4 liitate la coanda
prin frec3enta7
$ sc-eme de coanda coplicate7
$ posibilitatea aparitiei pendularilor la 3ariatia /rusca a sarcinii4 s.a.
Caracteristica ecanica a asinii sincrone alientata la
frec3enta constanta f
1
este o dreapta paralela cu a6a cuplului4 3ite.a
un"2iulara 5n re"i sta/[Link] 'ind data de expresia 6
(*)
Heste o anumita valoare
O
a cuplului sarcinii, masina sincrona iese din
sincronism si se opreste.
$n scopul aprecierii posibilitatii de ncarcare a masinii sincrone, se foloseste
caracteristica mecanica ung-iulara, definita ca dependenta dintre cuplul al masinii
sincrone si ung-iul intern P ntre tensiunea de alimentare si t.e.m.
e
determinata
de fluxul inductor al masinii .
1+
#aracteristica mecanica ung-iulara a masinii sincrone cu poli plini
Cuplul masinii sincrone cu poli plini are expresia 6
(,)
unde
O
este valoarea maxima a cuplului, la 1 B9
9
, avnd expresia6
,I
d
1I
P
1 I
s
(;)
La masina cu poli aparenti, ecuatia caracteristicii ung-iulare apare
sub forma 6 (<)
unde6 (=)
si
$n relatiile (;), (=) si (>) apar urmatoarele marimi6
Q
*
/ viteza de sincronismG
"
9
/ tensiunea electromotoare indusa de cmpul magnetic nvrtitor inductorG
U / tensiunea de faza statoricaG
I
d
1 5R
d
/ reactanta sincrona longitudinalaG
I
P
1 5R
P
/ reactanta sincrona transversala.
"xpresiile cuplului electromagnetic se obtin sriind ecuatiile masinii sincrone n
sistemul de coordonate fix fata de rotor d,q,0.
1,
CAPITO8U8 9
RE:IMU8 DE ;U<CTIO<ARE BI8A<SU8 DE PUTERI
TI RA<DAME<TU8 MOTOARE8OR =I<CRO<E
Cu"lul electromagnetic dezvoltat c/nd ma+ina este cu"lat 0a re1ea
+ac tensiunea re'elei U %i t.e.m. "
o
a generatorului au aceea%i pulsa'ie se
pstreaz rela'ia (**). &vnd n vedere c (a ma%ina sincron rezisten'a : %i
reactan'a IJ sunt mici fa' de reactan'a I
s
, n rela'ia (B) se poate considera U U" %i
ecua'ia (**) devine
I jX U E
s
+
0 . #u aceste simplificri, diagrama de fazori este cea
din figura ** iar puterea electromagnetic a ma%inii sincrone trifazate se
aproximeaz cu
rel. *,
&vnd n vedere c n figura ** segmentul expresia
(*,) a puterii %i cea a cuplului electromagnetic devin6
rel. *;
+eci, att puterea ct %i cuplul electromagnetic variaz sinusoidal cu ung-iul
intern, pentru "
o
1 ct, adicV pentru curentul de excitalie (
e
1 ct %i fluxul 0
o
1 ct (fig.
*,).
1-
)eini1ia regimurilor de generator +i de motor
#onsidernd c rotorul ma%inii are 7W7
*
, "
o
are pu(sa'ia 51 p 7W7
*
ung-iul
intern D, definit la reac'ia indusului variaz continuu, iar cuplul electromagnetic dat de
rela'ia (*;) este un cuplu alternativ, deci cu valoare medie nul. +e aici rezult c
ma%ina sincron nu dezvolt cuplu electromagnetic dect atunci cnd 717
*
, adic
rotorul are tura'ia de sincronism impus de pulsa'ia 5
*
a re'elei (a care este cuplat
ma%ina. +ac ma%ina sincron func'ioneaz pe re'ea proprie ca generator, acesta
impune %i frecven'a re'elei alimentate. +in aceast cauz, cuplul electromagnetic al
ma%inii sincrone se mai nume%te cuplu sincron.
+ac ma%ina cuplat la re'ea func'ioneaz n regim de generator, adic d
energie activ n re'ea, trebuie s fie antrenat de un motor primar care s conduc
la cre%terea ung-iului intern D definit (a reac'ia indusului si H
e
W9 din rela'ia *;. $n
regim de generator cmpul rezultant este decalat n urma campului inductor (fig.
*9a si fig. *;a). +ac D19, ma%ina nu d %i nu prime%te energie activ (fig. *9b si
*;b). +ac la arborele ma%inii apare un cuplu rezistent care tinde s scad tura'ia
motorului , axa polului rotoric rmne n urm fa' de axa polului cmpului rezultant
(fig. *;c) deci D19, apare un cuplu sincron, ma%ina prime%te energie activ de la
re'ea %i dezvolt un cuplu mecanic la arbore.
1%
$n acest caz, ma%ina func'ioneaz n regim de motor. Le reaminte%te c
motorul sincron dezvolt un cuplu numai dac are tura'ia n 1n
*
. Ra pornire (n 1 9)
sau (a alt tura'ie (n Wn
*
) nu dezvolt cuplu. #nd ma%ina este cuplat (a re'ea, dar
nu sc-imb putere activ c ea, deci D1 9, dar poate, da sau primi energie reactiv se
spune c func'ioneaz n regim de compensator (fig. *9, b %i c %i fig. *;, b).
2i0an1ul de "uteri active +i randamentul.
Lc-imbul de energie a ma%inii sincrone cu re'eaua (a care este conectat
depinde, cum s/a artat, de regimul su de func'ionare. Huterea util poate fi activ
la motor, activ/reactiv (a generator sau complet reactiv (a compensator.
:andamentul unei ma%ini find definit de puterile active ? primit H
i
cedat H
,
? se
va urmri rela'ia dintre aceste puteri %i pierderile de putere activ din ma%in. #a
orice ma%in rotativ, ma%ina sincron are pierderi mecanice H
f
? de frecare %i
ventila'ie, pierderi n circuitul magnetic a( indusului H
Ce*
? datorit varia'iei n timp a fluxului magnetic, pierderile n nfu%urarea trifazat a
indusului H
2
1 ;:(
,
%i pierderi n nf%urare de excita'ie H
ex
1 :
e
(
,
e
(pierderi n circuitul
1(
a"netic inductor nu sunt4 >u6uI 'ind constant 5n tip4 ca ?i curentul de
e6cita@ie care$I produceA.
Deci4 randaentul tre/uie [Link] pentru un anuit factor de
putere. [Link] sc2eaticB a /ilan@ului de puteri acti3e C'"ura de
ai DosA conduce ?i Ia rela@iile randaentului E
:
F pentru "enerator ?i E
M
F pentru otor:
rel. 1*
&)
Capitolul 3i
etode de pornire a otoarelor sincrone
Hornirea motorului sincron se face n doua etape6 n prima etapa se mareste
viteza masinii de la zero la o valoare 7 ct mai apropiata de cea sincrona, X
*
G n a
doua etapa se realizeaza sincronizarea vitezei masinii cu frecventa retelei de
alimentare, adica se mareste X la X
*
.
#ea mai raspndita metoda de pornire este pornirea n asincron. Hrima etapa
se realizeaza prin pornirea masinii sincrone ca o masina asincrona, cu a!utorul
coliviei montata n talpile polare. Hentru pornire, masina sincrona se conecteaza la
reteaua de c.c. legata peste o rezistenta :
p
. Hornirea se face ca la masina asincrona,
adica direct, sau cu rezistoare ori bobine montate n circuitul statoric, fie cu un
autotrasformator.
+upa ce viteza a a!uns aproape de cea sincrona (s Y 9,9=), se deconecteaza
rezistenta :
p
si se leaga circuitul de excitatie la bornele sursei de c.c. (redresor
comandat cu tiristoare).
$n figura de mai !os se prezinta sc-ema pornirii unei actionari cu masina
electrica sincrona.
Hornirea masinii sincrone m
1
se realizeaza cu bobinele k
1
, care se
scurtcircuiteaza cu contactele c
2
dupa cem m
1
a fost adusa n sincronism cu reteaua
prin alimentarea excitatiei n c.c. $n prima etapa a pornirii, puntea trifazata u
1
cu
tiristoare este blocata, iar tiristorul p
1
este aprins.
#urentul alternativ din nfasurarea de excitatie se nc-ide prin ansamblul p
1
/p
2
G
o alternanta prin p
1
si alta prin p
2
.+upa atingerea vitezei maxime la functionarea n
asincron se bloc-eaza tiristorul p
1
si se comanda intrarea n functie a redresorului
comandat u
1
, alimentat de la retea prin transformatorul m
2
. Huntea u
1
permite si
fortarea excitatiei prin marirea sarcinii aplicate.
+in momentul conectarii excitatiei la sursa de c.c. pna la atingerea vitezei
sincrone, respectiv a functionarii stabilizate, are loc a doua etapa a procesului
tranzitoriu de pornire. (ntrarea n sincronism are loc au att mai usor cu ct, n
momentul stabilirii curentului continuu prin nfasurarea de excitatie, alunecarea s si
cuplul M
R
sunt mai mici si valoarea ung-iului intern q este mai apropiata de zero.
Lc-ema de pornire a unei actionari electrice cu masina sincrona
&1
3egimul de r/nare
Crnarea se poate realiza prin 6
a) / contracurent
b) / frnare cu recuperare
c) / alimentarea statorului n c.c.
d) / frnare dinamica sau reostatica
etoda a se face ca si n cazul masinii asincrone, dar nu se mai aplica n
prezent, deoarece duce la socuri maride curent, factor de putere scazut si complicatii
n sc-ema de comanda.
etoda b, n cazul alimentarii la frecventa constanta nu are aplicatii practice n
actionari, deoarece nu se poate realiza dect la turatia sincrona.
etoda c, prin alimentarea statorului n curent continuu se face ca la masina
asincrona, dar cuplul de frnareeste mic si n plus este necesara sursa de curent
continuu.
etoda aplicata n cazul actionarilor cu masini sincrone este metoda d, la care
masina functioneaza n regim de generator fara recuperaren a energiei. Crnarea
reostatica se realizeaza prin deconectarea statorului masinii de la retea si cuplarea
lui pe o rezistenta trifazata de frnare :
f
, nfasurarea rotorica ramnnd alimentata n
curent continuu .
Crnarea n cmp excitat de curent continuu
$n cazul masinii cu poli plini cuplul de frnare are expresia6
, (@)
unde 6
3
este cuplul maxim, si , I fiind reactanta fazei
indusului.
&&
#aracteristicile au o forma asemanatoare cu ale masinii asincrone
excitata n curent continuu. Zaloarea cuplului de frnare depinde de viteza relativa [,
de curentul de excitatie i
e
si de rezistenta :
f
.
Listeme de actionare electrica cu motoare sincrone trifazate, cu viteza
variabila
otorul sincron are viteza ung-iulara egala cu viteza de sincronism, data de
relatia6
(A)
&tta timp ct cuplul static rezistent la arbore nu depaseste cuplul sau
electromagnetic maxim, rezulta ca reglarea vitezei sale se poate face doar prin
modificarea frecventei tensiunii de alimentare statorice. odificarea frecventei
tensiunii de alimentare se face cu a!utorul convertoarelor de frecventa cu comutatie
statica. &cestea se pot mparti n6 convertoare cu comutatie externa independenta, la
care frecventa de iesire este impusa de un generator de tact independent de retea
(fig.@.a) si convertoare conduse de motor, la care frecventa de iesire este
determinata de nsusi motorul sincron (fig.@.b).
Cig.@.otorul sincron cu viteza variabila, obtinuta cu convertor de frecventa6
a / cu comutatie externa independentaG b / condus de motor.
u
*
/ redresorG
:
/ ung-iul de comanda al tiristoarelor redresorului
u
,
/ invertorG
/ ung-iul de comanda al tiristoarelor invertorului
&#
+#: / dispozitiv de comanda redresorG #CT / convertor frecventa / tensiuneG
+# / dispozitiv de comanda invertor
TH / traductor de pozitie
7
p
/ viteza ung-iulara prescrisa
$n sistemele de actionare electrica automate se utilizeaza motoarele sincrone
cu magneti permanenti n rotor, numit si motor fara perii (brus-less). Ra ora actuala
se considera ca acest motor poate sa nlocuiasca motorul de curent continuu, avnd
n vedere urmatoarele avanta!e6
/absenta colectorului si a oricarui contact electric de alunecare vor diminua
problemele de ntretinere, acestea fiind transferate catre electronica de putere, cu
specificatia ca fiabilitatea acesteia nu ridica n general probleme, iar pierderile
energetice sunt mult diminuateG
/curentul statoric si constanta de timp termica au valori ridicate, iar racirea
motorului este usoara ( de exemplu prin curent de aer)G
/rotorul se realizeaza pe baza unui magnet permanent si astfel viteza
rotorului poate atinge valori ridicate, neexistnd limitari ca n cazul colectorului
mecanic.
Lc-ema de principiu a alimentarii si comenzii electronice prin curenti cvasi/
dreptung-iulari a unui motor sincron trifazat fara perii este prezentata n figura de mai
!os.
Lc-ema bloc a unui motor sincron fara perii trifazat cu alimentare si comanda prin
curenti cvasi/dreptung-iulari
"lectronica de comanda are doua functiuni6
&*
/selectionarea, pe baza semnalelor traductoarelor de pozitie rotorica, a
perec-ii de tranzistoare de putere din partea superioara a puntii, respectiv cea
inferioara, ale invertorului, prin conductia carora se aplica tensiunea de alimentare pe
doua faze statorice nseriate ale motoruluiG
/modularea acestei tensiuni pentru asigurarea controlului curentului statoric,
prin actiunea directa asupra comenzii perec-ii de tranzistoare.
"xista mai multe procedee de control al curentului, dintre care se considera
reglarea bipozitionala prin comparator cu -isterezis (a) si reglarea liniara prin
corector proportional/integrator (H() (b).
$n cazul (a) reglarea consta n a comanda tranzistoarele de putere din
invertor, astfel nct curentul instantaneu de faza statoric al motorului sa se mentina
ntr/o banda de -isterezis de latime fixa (, \(), centrata pe valoarea prescrisa (
ref
a
curentului de referinta.
$n cazul (b), eroarea dintre curentul de referinta si cel de faza statoric masurat
este prelucrata printr/un corector H(G la iesirea acestuia, semnalul este modulat prin
te-nica modularii n latime de puls (HX), n care unda purtatoare este triung-iulara,
de amplitudine si frecventa (]=3Nz) fixe.
CAPITO8U8 9II
UTI8IZARI
&+
a%inile (motoarele) sincrone pot func'iona n regim de generator, de motor %i
ntr/un regim de compensator de putere reactiv (compensator sincron).
Meneratoarele sincrone (alternatoarele), constituie surse de curent alternativ
de frecven' industrial din centralele electrice. Tendin'a este ca ele s se realizeze
cu puteri ct mai mari pe unitate, pentru ob'inerea de randamente mari %i consumuri
specifice mici de materiale.
Meneratoarele sincrone mari cu poli neca'i, antrenate de turbine cu abur sau
gaze la tura'ii de ;999 rotFmin. sau mai rar de *=99rotFmin. se numesc
^turbogeneratoare_, iar cele cu tura'ii mici, cu poli aparen'i, antrenate de turbine
-idraulice se numesc ^-idrogeneratoare_.
otoarele sincrone se folosesc la puteri de *99OX, n locul motoarelor
asincrone, pentru func'ionarea la un factor de putere dorit sau c-iar pentru
compensarea factorului de putere al re'elelor. #a motoare mai mici se utilizeaz
acolo unde se impune o tura'ie sincron.
#ompensatoarele sincrone sunt motoare sincrone care func'ioneaz n gol %i
debiteaz putere reactiv n re'elele la care sunt conectate pentru a le imbunt'i
factorul de putere.
CAPITO8U8 9III
BIB8IO:RA;IE
&,
*. Nstase `ic-ir, +an i-oc a ^a%ini, aparate, ac'ionri %i automatizri_
,. (nternet
&-
S-ar putea să vă placă și
- Motorul de Curent Continuu Cu Excitație Separată (Derivație) Referat100% (1)Motorul de Curent Continuu Cu Excitație Separată (Derivație) Referat9 pagini
- Generatorul de Curent Continuu Cu Excitatie Independent A Sau DerivatieÎncă nu există evaluăriGeneratorul de Curent Continuu Cu Excitatie Independent A Sau Derivatie7 pagini
- Sisteme de Actionare Ale Robotilor Industriali100% (1)Sisteme de Actionare Ale Robotilor Industriali20 pagini
- Caracteristicile Motorului Asincron Trifazat Cu Rotorul BobinatÎncă nu există evaluăriCaracteristicile Motorului Asincron Trifazat Cu Rotorul Bobinat9 pagini
- Masina Sincrona - Proiect Pentru Obtinerea Certificatului de Competente ProfesionaleÎncă nu există evaluăriMasina Sincrona - Proiect Pentru Obtinerea Certificatului de Competente Profesionale26 pagini
- Metode de Pornire A Motorului Asincron Cu Rotorul Bobinat100% (1)Metode de Pornire A Motorului Asincron Cu Rotorul Bobinat30 pagini
- Convertoare Electromecanice I CursÎncă nu există evaluăriConvertoare Electromecanice I Curs84 pagini
- L12 - Reglarea Vitezei Unui SAE Cu Motor Asincron Prin Utilizarea Cascadei KRAMERÎncă nu există evaluăriL12 - Reglarea Vitezei Unui SAE Cu Motor Asincron Prin Utilizarea Cascadei KRAMER4 pagini
- Motorul Electric de Curent ContinuuÎncă nu există evaluăriMotorul Electric de Curent Continuu6 pagini
- Proiect Atestat - A Defectelor Circuitelor Pentru Reglarea Vitezei Motoarelor de Curent Continuu100% (1)Proiect Atestat - A Defectelor Circuitelor Pentru Reglarea Vitezei Motoarelor de Curent Continuu29 pagini
- Caracteristica Mecanica A Motorului Asincron100% (3)Caracteristica Mecanica A Motorului Asincron8 pagini
- Calculul Unui Generator Sincronindrumar Proiectare Generator Sincron100% (5)Calculul Unui Generator Sincronindrumar Proiectare Generator Sincron41 pagini
- Motorul de CC Cu Excitatie SeparataÎncă nu există evaluăriMotorul de CC Cu Excitatie Separata4 pagini
- Capitolul 1 Generalitati Masina AsincronaÎncă nu există evaluăriCapitolul 1 Generalitati Masina Asincrona25 pagini
- Structura Generală A Unui Sistem de Acţionare ElectricăÎncă nu există evaluăriStructura Generală A Unui Sistem de Acţionare Electrică3 pagini
- Baza Energetica Si Masini AgricoleÎncă nu există evaluăriBaza Energetica Si Masini Agricole21 pagini
- Ionela Marginean - Model Atestat TehniceÎncă nu există evaluăriIonela Marginean - Model Atestat Tehnice20 pagini
- Suport Curs - Masini Electrice SincroneÎncă nu există evaluăriSuport Curs - Masini Electrice Sincrone27 pagini
- TEMA I Drepturile Si Libertatile CetatenestiÎncă nu există evaluăriTEMA I Drepturile Si Libertatile Cetatenesti9 pagini
- Anexa Nr. 7 - GRILĂ DE EVALUARE A NIVELULUI DE RISC PENTRU SPAŢIILE COMERCIALE CU SUPRAFAŢA MAI MARE DE 500 MPÎncă nu există evaluăriAnexa Nr. 7 - GRILĂ DE EVALUARE A NIVELULUI DE RISC PENTRU SPAŢIILE COMERCIALE CU SUPRAFAŢA MAI MARE DE 500 MP2 pagini