S-ar putea să vă placă și
- Motorul Universal Cu ColectorDocument3 paginiMotorul Universal Cu ColectorMIHAIMG19100% (1)
- Motor Universal Cu ColectorDocument19 paginiMotor Universal Cu ColectorStefania StolniceanuÎncă nu există evaluări
- Caracteristicile Statice Ale Masinii de Curent Continuu Cu Excitatie SeparataDocument9 paginiCaracteristicile Statice Ale Masinii de Curent Continuu Cu Excitatie SeparataroxanavornicescuÎncă nu există evaluări
- AHPDocument87 paginiAHPVlahos IanacheÎncă nu există evaluări
- Circuite Basculante AstabileDocument19 paginiCircuite Basculante AstabileMarian M ScoriloÎncă nu există evaluări
- Forte ElectrodinamiceDocument19 paginiForte ElectrodinamiceCata CatalinÎncă nu există evaluări
- Convertoare Statice de FrecventaDocument2 paginiConvertoare Statice de FrecventaRoxana IonescuÎncă nu există evaluări
- Motorul de Curent Continuu Part 2Document6 paginiMotorul de Curent Continuu Part 2Calina EmilianÎncă nu există evaluări
- Sisteme de Stocare Mecanica A EnergieiDocument46 paginiSisteme de Stocare Mecanica A EnergieiIonașcu IonÎncă nu există evaluări
- Me Ii Mas - SinDocument65 paginiMe Ii Mas - SinBivolaru AndreiÎncă nu există evaluări
- L12 - Reglarea Vitezei Unui SAE Cu Motor Asincron Prin Utilizarea Cascadei KRAMERDocument4 paginiL12 - Reglarea Vitezei Unui SAE Cu Motor Asincron Prin Utilizarea Cascadei KRAMERpavelpopescuÎncă nu există evaluări
- Minimizarea Cu Diagramelor KVDocument11 paginiMinimizarea Cu Diagramelor KVAnndu AnduÎncă nu există evaluări
- Cap6 6.1.serii FourierDocument10 paginiCap6 6.1.serii FourierKta CataÎncă nu există evaluări
- Circuite SecventialeDocument338 paginiCircuite SecventialeCrets AncaÎncă nu există evaluări
- L1Document6 paginiL1Alex PumneaÎncă nu există evaluări
- Lucrare de Laborator 2 - Dioda - V2.1Document9 paginiLucrare de Laborator 2 - Dioda - V2.1Alex TipulÎncă nu există evaluări
- Intensitatea Curentului Electric Si Densitatea de CurentDocument1 paginăIntensitatea Curentului Electric Si Densitatea de CurentMaria Ioana Chirila100% (1)
- Aparate Electrodinamice Si FerodinamiceDocument7 paginiAparate Electrodinamice Si FerodinamiceЛуминица Б.Încă nu există evaluări
- Capitolul 6 Masina de Curent ContinuuDocument54 paginiCapitolul 6 Masina de Curent ContinuuDavid FlorinÎncă nu există evaluări
- Curs MicroDocument44 paginiCurs MicroCiprianÎncă nu există evaluări
- 1.circuite Electrice Liniare de Curent ContinuuDocument39 pagini1.circuite Electrice Liniare de Curent ContinuuGalea DuminicaÎncă nu există evaluări
- Redresoare Trifazate (Întrebarea 6)Document2 paginiRedresoare Trifazate (Întrebarea 6)Inna MunteanÎncă nu există evaluări
- Teme - Convertoare Statice ELTHDocument17 paginiTeme - Convertoare Statice ELTHSandu CristianÎncă nu există evaluări
- R5-2 (TC2) - Sinteza Unui Automat Secvential SincronDocument2 paginiR5-2 (TC2) - Sinteza Unui Automat Secvential Sincrontzwtzw25Încă nu există evaluări
- Prezentare Motoare ElectriceDocument26 paginiPrezentare Motoare ElectriceIleana BadeaÎncă nu există evaluări
- Masina AsincronaDocument4 paginiMasina AsincronaFicu GheorgheÎncă nu există evaluări
- 6.MASINA ASINCRONA Functionarea in Condiftii DiferiteDocument7 pagini6.MASINA ASINCRONA Functionarea in Condiftii DiferiteGabitza GabrielaÎncă nu există evaluări
- Proiect Daogaru AlinDocument20 paginiProiect Daogaru AlinCRISTIAN PICANÎncă nu există evaluări
- Proiectarea Si Simularea Unui Invertor Trifazat Cu 2 Celule Imbricate Pe FazaDocument10 paginiProiectarea Si Simularea Unui Invertor Trifazat Cu 2 Celule Imbricate Pe FazajjhtftthkjthhjÎncă nu există evaluări
- #3mecanism. Principiul Formarii Mecanismelor.Document5 pagini#3mecanism. Principiul Formarii Mecanismelor.Nick MunteanÎncă nu există evaluări
- CRR - XI - Elmec Inst Si AP de Bord AeronaveDocument34 paginiCRR - XI - Elmec Inst Si AP de Bord AeronavecorneliamarcelaÎncă nu există evaluări
- Referat 6Document6 paginiReferat 6Ivan Liviu IonÎncă nu există evaluări
- Sistem de Actionare Reversibila in 4 Cadrane Cu Convertor Bidirectional Cu Curenti de CirculatieDocument3 paginiSistem de Actionare Reversibila in 4 Cadrane Cu Convertor Bidirectional Cu Curenti de Circulatiesonic8659Încă nu există evaluări
- Gruparea Condensatoarelor PDFDocument3 paginiGruparea Condensatoarelor PDFMihai PaunÎncă nu există evaluări
- Pornirea Directa A Motorului Asincron Trifazat 01ADocument7 paginiPornirea Directa A Motorului Asincron Trifazat 01AclairevanderwoodsenÎncă nu există evaluări
- Actionari Electrice II LaboratorDocument55 paginiActionari Electrice II LaboratorIulian100% (1)
- Platforma Festo Pentru Automatizarea Plasării de Recipiente in Instalatie Cu Ajutorul Unor Automate ProgramabileDocument13 paginiPlatforma Festo Pentru Automatizarea Plasării de Recipiente in Instalatie Cu Ajutorul Unor Automate ProgramabileOana Mihaela NeculaÎncă nu există evaluări
- Tahogeneratorul SincronDocument2 paginiTahogeneratorul SincronAmy Lia IoanaÎncă nu există evaluări
- Efectul Joule LentzDocument9 paginiEfectul Joule LentzBurlacu MariusÎncă nu există evaluări
- Proiect ME II - Facultatea de InginerieDocument37 paginiProiect ME II - Facultatea de InginerieVALENTIN-IULIAN BĂRBULESCUÎncă nu există evaluări
- Ingineria Reglarii Automate - Note de CursDocument60 paginiIngineria Reglarii Automate - Note de Curswww.astro.roÎncă nu există evaluări
- Descriere FEMMDocument27 paginiDescriere FEMMVasilii CruduÎncă nu există evaluări
- Lampi de SemnalizareDocument4 paginiLampi de Semnalizareyetty69Încă nu există evaluări
- SenzorDocument23 paginiSenzorcrocrosÎncă nu există evaluări
- Grile Examen CSSEDocument6 paginiGrile Examen CSSEMihai CălinÎncă nu există evaluări
- 5.MASINA ASINCRONA-metode de PornireDocument7 pagini5.MASINA ASINCRONA-metode de PornireGabitza GabrielaÎncă nu există evaluări
- A 54Document1 paginăA 54Nicolae BurcaÎncă nu există evaluări
- Prezentare Curs Tractiune CURS 2Document12 paginiPrezentare Curs Tractiune CURS 2Todd Dany100% (1)
- Masina SincronaDocument3 paginiMasina SincronaIlioai VladÎncă nu există evaluări
- Inductanta MutualaDocument3 paginiInductanta MutualaMihai Popa100% (1)
- Producerea Curentului AlternativDocument8 paginiProducerea Curentului Alternativspike9444Încă nu există evaluări
- Convertoare StaticeDocument23 paginiConvertoare StaticeAlex Rob RobertÎncă nu există evaluări
- 07 - Masurarea Capacitatilor Si Inductantelor Cu Punti de CADocument4 pagini07 - Masurarea Capacitatilor Si Inductantelor Cu Punti de CAViorel CosminÎncă nu există evaluări
- Subiecte Colocviu Lab CSEDocument1 paginăSubiecte Colocviu Lab CSEGabriel StanciuÎncă nu există evaluări
- MT2 Cursuri ExamenDocument40 paginiMT2 Cursuri ExamenCostinStoicaÎncă nu există evaluări
- 4.elemete de CircuitDocument29 pagini4.elemete de CircuittibiavramÎncă nu există evaluări
- Punti RLCDocument8 paginiPunti RLCIulian MarianÎncă nu există evaluări
- Actionari ElectriceDocument27 paginiActionari ElectriceAntohe Viorel100% (1)
- Masini C.A. Cu ColectorDocument6 paginiMasini C.A. Cu ColectorBia ŞimanÎncă nu există evaluări
- Servomotoare de C.A. TrifazateDocument11 paginiServomotoare de C.A. TrifazateCraciun Alex100% (1)
- Capitolul 4Document15 paginiCapitolul 4Marius Dan AlexiuÎncă nu există evaluări
- 2 DrogurileDocument16 pagini2 DrogurileMarius Dan AlexiuÎncă nu există evaluări
- Pericolul DrogurilorDocument12 paginiPericolul DrogurilorMarius Dan AlexiuÎncă nu există evaluări
- M 2sisteme de Actionare ElectricaDocument4 paginiM 2sisteme de Actionare ElectricaMarius Dan AlexiuÎncă nu există evaluări
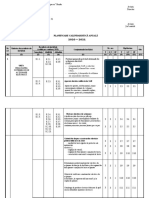
- Model Planificare Clasa X 1Document8 paginiModel Planificare Clasa X 1Marius Dan AlexiuÎncă nu există evaluări
- 1.piata Produselor - I Tehnologiilor ElectriceDocument179 pagini1.piata Produselor - I Tehnologiilor ElectriceMarius Dan AlexiuÎncă nu există evaluări
- Fisa Caracterizare A Clasei de EleviDocument3 paginiFisa Caracterizare A Clasei de EleviMarius Dan AlexiuÎncă nu există evaluări
- Cap 3 4 Circuite Electrice MonofazateDocument20 paginiCap 3 4 Circuite Electrice MonofazateMarius Dan AlexiuÎncă nu există evaluări
- Masini ElectriceDocument57 paginiMasini ElectriceMarius Dan Alexiu100% (1)
- Fisa Caracterizare A Clasei de Elevi 1Document5 paginiFisa Caracterizare A Clasei de Elevi 1Marius Dan AlexiuÎncă nu există evaluări
- Fisa Laborator Circuit ElectricDocument2 paginiFisa Laborator Circuit ElectricMarius Dan AlexiuÎncă nu există evaluări
- 1 Fisa LucruDocument2 pagini1 Fisa LucruMarius Dan AlexiuÎncă nu există evaluări
- TEST EVALUARE FINALĂ NR 2, An 2021Document3 paginiTEST EVALUARE FINALĂ NR 2, An 2021Marius Dan Alexiu100% (1)
- TEST EVALUARE nr.3, An 2021Document3 paginiTEST EVALUARE nr.3, An 2021Marius Dan Alexiu100% (2)
- Montarea, Reglarea Si Exploatarea Aparatului Electric XC M2Document18 paginiMontarea, Reglarea Si Exploatarea Aparatului Electric XC M2Marius Dan AlexiuÎncă nu există evaluări
- Aparate Electrice de Masura Si Masurarea Marimilor ElectriceDocument42 paginiAparate Electrice de Masura Si Masurarea Marimilor ElectriceMarius Dan AlexiuÎncă nu există evaluări
- Planif CDL M3 XI CDocument2 paginiPlanif CDL M3 XI CMarius Dan AlexiuÎncă nu există evaluări
- Ecosisteme Antropice IX FDocument9 paginiEcosisteme Antropice IX FMarius Dan AlexiuÎncă nu există evaluări
- Plan Lectie Defectele Asamblarilor NedemontabileDocument9 paginiPlan Lectie Defectele Asamblarilor NedemontabileMarius Dan AlexiuÎncă nu există evaluări
- Plan Lectie Elementele Actionarilor HidrauliceDocument9 paginiPlan Lectie Elementele Actionarilor HidrauliceMarius Dan AlexiuÎncă nu există evaluări
- Cainele OvreiuluiDocument1 paginăCainele OvreiuluiMarius Dan AlexiuÎncă nu există evaluări
- Plan - Lectie - Transmisia Prin CabluDocument12 paginiPlan - Lectie - Transmisia Prin CabluMarius Dan AlexiuÎncă nu există evaluări