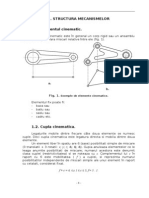
Partea II MECANISME
Studiul mainilor i mecanismelor este tiina despre metodele de cercetare i proiectare a mainilor i mecanismelor. O parte a acestei tiine mai dezvoltat, numita teoria mecanismelor, n care mai cu seam se studiaz proprietile mecanismelor, care sunt cunoscute pentru toate (sau pentru anumite grupe speciale) mecanismele, indiferent de menirea concret a mainii, dispozitiv sau aparat. De exemplu, unul i acelai mecanism pentru transformarea micrii de rotaie, realizat n forma roilor dinate, poate fi folosit n automobile, malaxoare (agitatoare, amestictoare) aparatelor din industria naional. n toate cazurile indicate se cere o singur condiie de transformare a micrii, de aceea metodele de cercetare i proiectare a acestor mecanisme au multe afiniti i respectiv formeaz coninutul teoriei mecanismelor. O alt parte a tiinei o alctuiete teoria mainilor, n care se examineaz metode de cercetare i proiectare, fiind comune pentru mainile din diferite domenii tehnice. Ambele pri sunt strns legate ntre ele, deoarece mecanismele alctuiesc baza oricrei maini. Problemele teoriei mainilor i mecanismelor sunt diverse, nsa cele mai importante pot fi grupate n trei pri: sinteza mecanismelor, dinamica mainilor i teoria mainilor automobile. Prin sinteza mecanismelor se subnelege acea parte de proiectare a acestora, care se refer la alegerea schemei i determinarea parametrilor acestei scheme, ce ar asigura ndeplinirea micrilor cerute. Problemele de dinamic a mecanismelor constau n studiul miscrii unor pri (elemente) ale mecanismului sub aciunea sarcinilor exterioare. Teoria mainilor automat studiaz metode de construire a schemelor acestora conform condiiilor cu caracter coordonat de funcionare a unor mecanisme separate i realizarea unei precizii i fiabiliti optime a mainilor automat. Aceast divizare este convenional.
54
Capitolul II STRUCTURA MECANISMELOR
2.1. Generaliti Mecanismul este sistemul mecanic format din corpuri materiale rezistente, ntre care exist legturi mobile i care sub aciunea forelor i pot schimba poziia relativ, n raport cu unul din ele, n vederea ndeplinirii unor funciuni pentru care au fost create. Aceste funciuni sunt de o mare diversitate i anume: - transmiterea puterii mecanice (a fluxului energetic mecanic), de exemplu: mecanismele din transmisiile mainilor (cutii de vitez), mecanisme cardanice, mecanisme cu curele, cu lanuri etc.; - transmiterea i transformarea micrilor, de exemplu: mecanismele diferitelor aparate de msur, inclusiv ale ceasurilor, diferite mecanisme de comand n maini i linii automate, mecanisme generatoare de funcii etc.; - transmiterea i transformarea forelor, de exemplu: mecanisme de prindere n mainile-unelte, greifere, manipulatoare, cleti, mecanismele frnelor autovehiculelor etc.; - ghidarea unui corp, de exemplu: manipulatoare, mecanismele de direcie ale autovehiculelor, mecanismele aparatelor de desenat etc. Prin corpuri materiale rezistente se neleg solidele rigide i deformabile, parial sau total, precum i cele fluide, iar la mecanismele fiinelor: oasele, muchii etc. Din nsi definiia mecanismului, prin structur se nelege mulimea legturilor existente ntre elementele sale, inclusiv, cele cu mediul ambiant. Ca urmare, ea urmrete: - elaborarea unei terminologii tiinifice, specifice i adecvate, teoriei mecanismelor; - elaborarea modelului structural al mecanismului; - studiul legturilor existente n mecanism, deci al cuplelor cinematice i al sistemelor de cuple cinematice (policuple cinematice), lanuri cinematice etc.; - optimizarea structural a mecanismelor, deci conceperea de modele de mecanisme determinate cinematic i static.
55
ntruct, noiunea fundamental n analiza i sinteza mecanismelor este cea de cupl cinematic, prezenta parte ncepe cu aceasta, introducndu-se pe parcurs i terminologia specific teoriei mecanismelor. 2.2. Cupl cinematic Prin cupl cinematic se nelege asocierea (legtura) direct i mobil dintre elementele cinematice. 2.2.1. Element cinematic
Prin element cinematic se nelege acea parte simpl, component distinct a mecanismului, capabil s transmit for. Forma lui rezult n urma unui proces tehnologic de prelucrare, iar constructiv el poate fi realizat din una sau mai multe pri mbinate solidar, numite piese. Astfel ansamblul din figura 1.1, a format din arborele 1, roata dinat 2, pana longitudinal 3 i urubul 4 formeaz un singur element cinematic. In funcie de numrul pieselor, elementele pot avea diverse grade de complexitate, figura 1.1, b, c, d, e, f, g, h. In structura mecanismelor pot intra i elemente fluide, figura 1.2, a, b; corpuri solide deformabile, figura 1.2, c, d, e; corpuri solide cu elasticitate ridicat, figura 1.2, e, sau elemente inserate, figura 1.2, c, f, care pot ndeplini acelai rol funcional de a transmite for i, implicit, putere mecanic sau de a realiza o lege de micare dorit. De regul prezena acestor tipuri de elemente n structura mecanismelor complic raionamentele i de aceea n modelul structural de baz al mecanismului, n prima etap, se consider c exist numai corpuri rigide. Dac totui exist i corpuri nerigide, (mecanisme hibride), funciile materializate de acestea, fie c sunt considerate legturi indirecte, fie sunt nlocuite prin legturi directe echivalente; raionamentele fcute pe acest model, rmn valabile i n cazul mecanismelor hibride (cu corpuri rigide i nerigide). De regul, elementele se prezint prin segmente de dreapt, pe care sunt marcate zonele de contact cu elementele vecine, deci se face abstracie de particularitile tehnologice i constructive ale lor; principalele simboluri grafice n schemele mecanice sunt date n GOST-ul 2.770-68; 2.780-96. Pentru a se efectua analiza structural, se alege un sistem de referin, solidar cu unul din elemente, denumit element de referin sau element de baz, fix sau considerat fix, n raport cu observatorul; el se noteaz cu cifra zero.
56
Fig. 1.1
57
Fig. 1.2 2.2.2. Clasificarea cuplelor cinematice
Conform definiiei o cupl cinematic presupune un contact direct, deci existena unei zone de contact. Aceasta poate fi modelat cu ajutorul unor figuri geometrice adecvate, dintre care cele mai utilizate sunt prezentate n tabelul 1.1. Tabelul 1.1 Zona de contact la diverse cuple
Plan
b Prism c Con
Cilindru
Sfer
f Elipsoid
g Hiperboloid cu pnz
h Paraboloid hiperbolic
i Tor
j Tor cu cant
k Elipsoid riglat
l Elipsoid circular
58
Cuplele cinematice se clasific dup urmtoarele criterii: 2.2.2.1. Numrul de grade de libertate reduse (pierdute) Micarea relativ dintre dou elemente libere, unul n raport cu cellalt, are 6 grade de libertate. Aceeai micare dintre dou elemente asociate ntr-o cupl cinematic are un numr de grade de libertate mai mic dect 6. Deci, formarea unei cuple este nsoit de reducerea unui numr de grade de libertate. Conform acestui criteriu, cuplele se clasific n 5 clase (de la l la 5); clasa fiind egal cu numrul gradelor de libertate reduse. Gradele de libertate ale micrii relative sunt indicate prin rotaiile i translaiile elementare ale unui element, raportate la un sistem de axe de coordonate, solidar cu cellalt element. 2.2.2.2. Natura contactului dintre elemente
Dup acest criteriu cuplele sunt superioare, dac contactul dintre elemente se realizeaz ntr-un punct sau dup o linie, i inferioare, cnd contactul are loc dup o suprafa. Tabelul 1.2 prezint modele geometrice ale contactului unor cuple cinematice. Din punct de vedere cinematic cuplele superioare pot realiza orice legi de micare, n funcie de forma zonelor de contact. Presiunea de contact, de valoare ridicat, se distribuie pe suprafee mici, deci este posibil apariia unei uzuri intense. Din punct de vedere economic realizarea zonelor de contact este costisitoare. Mecanismele care au n structura lor cuple inferioare nu pot realiza orice lege de micare, ci numai n mod aproximativ. Sunt i legi de micare, pe care aceste cuple se pot realiza, dar, n general, se obin numai aproximaii optimale ale legilor cerute de procesul tehnologic. Presiunea de contact pe suprafaa acestor cuple are valori mult mai reduse, deci uzura lor poate fi mai mic. Din punct de vedere economic execuia lor este mai puin costisitoare, ntruct sunt mai simple. Deci cuplele superioare sunt avantajoase cinematic i dezavantajoase cinetostatic, iar cele inferioare sunt avantajoase cinetostatic i dezavantajoase cinematic.
59
Tabelul 1.2 Modele geometrice ale contactului unor cuple cinematice
60
2.2.2.3.
Caracterul micrii relative dintre elemente
Conform acestui criteriu cuplele pot fi plane, dac micarea relativ dintre elemente este plan - paralel i spaial, dac aceast micare este spaial. 2.2.2.4. Modul de nchidere a contactului
a Fig. 1.3
Aceasta reprezint de fapt i modul de asigurare a permanenei contactului. Cuplele pot fi: - cu nchiderea prin form, la care, prin nsi forma suprafeelor din contact, se mpiedic desfacerea acestuia, figura 1.3, a; - cu nchidere prin for, n care caz, pentru evitarea desfacerii contactului se utilizeaz o for exterioar, figura 1.3, b. 2.2.2.5. Dup independena sau dependena parametrilor, micrilor Dup acest criteriu se deosebesc: - cuple cu micri independente (cupla cilindric, o rotaie i o translaie independent), cupla sferic (trei rotaii independente) etc.; - cuple cu micri dependente ntre ele (cupla urub-piuli n care cele dou micri, translaia i rotaia, sunt dependente). Pentru exemplificare n tabelul 1.3 s-au sistematizat cteva cuple uzuale, precizndu-se micrile pe care le pot face, precum spaiul afectat de forele transmise prin legturi.
61
Tabelul 1.3 Cuple cinematice uzuale
Nr crt 1 Denumire 2 Schem cinematic i schem simbolic 3 Clasificare 4 - clasa 1-a - superioar - spaial - deschis - cu micare independent - clasa 2-a - superioar - spaial - nchis - cu micare independent - clasa 2-a - superioar - spaial - deschis - cu micare independent - clasa 2-a - superioar - spaial - deschis - cu micare independent - clasa 3-a - inferioar - spaial - nchis - cu micare independent
1 .
Cupl sfer-plan pentamobil.
2.
Cupl sferic cilindric tetramobil.
3.
Cupl cilindru cilindru tetramobil
4.
Cupla cilindru-plan tetramobil
5.
Cupla plan plan trimobil
62
6. Cupla sferic trimobil
clasa 3-a - inferioar - spaial - nchis - cu micare independent
63
Tabelul 1.3 (Continuare)
1 2 3 4
7. Cupla sferic cu tift (bimobil)
clasa 4-a - inferioar - spaial - nchis - cu micare independent
8. Cupla cilindru n cilindru bimobil
clasa 4-a - inferioar - spaial - nchis - cu micare independent
9. Cupla cilindric monomobil
clasa 5-a - inferioar - spaial - nchis - cu micare dependent
1 0. cupla de translaie monomobil
clasa 5-a - inferioar - plan - nchis - cu micare independent - clasa 5-a - inferioar - plan - nchis - cu micare independent
1 1.
Cupla cilindru pe plan monomobil
64
1 2. Cupla de rotaie monomobil
clasa 5-a - inferioar - spaial - nchis - cu micare independent
65
2.3.
Policupla cinematic
Policupla cinematic este un sistem binar compus, destinat s ndeplineasc rolul unei cuple cinematice n situaiile, teoretice i (sau) practice, n care folosirea cuplei nu poate asigura o soluie optim. Ele sunt folosite n urmtoarele situaii: - materializarea unor stri structurale, care nu pot fi obinute printr-o cupl; - materializarea legturilor dintre dou elemente adiacente n condiii practice, n care utilizarea cuplei cinematice nu poate asigura o soluie optim, din punct de vedere constructiv, tehnologic i economic, de exemplu: nlocuirea frecrii de alunecare prin frecare de rostogolire; realizarea unei configuraii ale sarcinilor de legtur capabile s transmit fore i momente mari etc. Se deosebesc urmtoarele tipuri de policuple: - policupla-paralel; - policupla-serie; - policupla-mixt. 2.3.1. Policupla - paralel
Policupla-paralel presupune un sistem binar direct policontact, rezultat prin legarea n paralel a dou sau mai multe cuple elementare. De exemplu n figura 1.4 se reprezint o policupl realizat prin legarea n paralel a unei cuple sferice n cilindru cu o cupl sferic, iar n figura 1.5 alt variant obinut prin legarea n paralel a dou cuple cilindrice.
Fig. 1.4
Fig. 1.5
66
2.3.2. Policupla - serie Prin policupla-serie se subnelege sistemul rezultat din nserierea a dou sau mai multe cuple elementare, n care elementele intermediare de legtur sunt elemente degenerate (au dimensiuni reduse n raport cu elementele extremale), deoarece elementele intermediare sunt degenerate, elementele extremale ale policuplei pot fi considerate drept elemente adiacente. n figura 1.6 este reprezentat cuplajul cardanic ca echipament tehnic al cuplei sferice cu deget, iar n figura 1.7 este prezentat o policupl utilizat n cuplajele tripoide, ca nlocuitor al cuplei pe cilindru.
Fig. 1.6
Fig. 1.7
67
2.3.3. Policupla - mixt Prin policupla-mixt se subnelege sistemul rezultat din legarea n serie i paralel a unor cuple elementare, n care elementele intermediare de legtur sunt degenerate. n varianta cea mai utilizat, policupla-mixt este format din dou sau mai multe policuple-serie legate n paralel.
Fig. 1.8
Fig. 1.9
n aceast variant stabilirea strii structurale presupune dou etape: analiza structural a fiecrei policuple-serie i analiza structural a policuplei-paralel se rezult din legarea n paralel a policupelor-serie. Exemple tipice de policuple-mixte sunt rulmenii, figura 1.8, respectiv, echivalena cuplei de translaie i a celei elicoidale, figura 1.9. 2.4. Optimizarea structural a cuplelor cinematice Cuplele i policulele cinematice se ntlnesc ntr-o mare diversitate de soluii. Stabilirea variantei optime presupune identificarea acelei soluii care, n condiii date, rspunde cel mai bine criteriilor tehnico-economice urmrite. Din rndul acestor criterii fac parte urmtoarele: - materializarea micrilor relative i deci a legturilor necesare; - realizarea capacitii portante necesare, care presupune transmiterea unor fore n condiiile unor micri relative date, a unui numr de ore de funcionare i a unor parametri tehnici de calitate bine precizai
68
(temperatur, randament, zgomot i vibraii etc.); n general policuplele pot realiza capaciti portante foarte mari; - reducerea pierderilor prin frecare, deci randamente maxime; acest criteriu presupune: fie reducerea frecrii de alunecare prin utilizarea unor materiale i a unor regimuri de ungere adecvate, fie nlocuirea frecrii de alunecare cu cea de rostogolire; - reducerea gabaritului corelat cu simplificarea construciei, tehnologiei si exploatrii; - realizarea unei economiciti maxime, adic cheltuieli minime de producie, exploatare i ntreinere eficient maxim n exploatare, competitivitate, etc. n practic apar o serie de abateri dependente de condiiile constructive, tehnologice i de funcionare, dintre care, frecvent se ntlnesc urmtoarele: deformaiile elastice i termice ale elementelor, frecarea n contactul mobil, n preciziile tehnologice de realizare a geometriei elementelor etc. Toate aceste abateri introduc erori, care pot fi compensate prin condiii adecvate. n funcie de abaterile compensate, se deosebesc urmtoarele corecii principale: - corecii pentru compensarea impreciziilor tehnologice i deformaiilor termice; - corecii pentru compensarea deformaiilor elastice ale elementelor; - corecii pentru compensarea uzurii. ntruct aceste corecii sunt interdependente, unei cuple i se aplic toate cele trei corecii, dar difereniat, n funcie de gradul de importan al fiecruia, n condiiile reale de funcionare. Dac compensarea abaterilor unei cuple nu mai este posibil, atunci ea se nlocuiete printr-o policupl echivalent, format prin legarea n paralel, n serie sau mixt a unor cuple cinematice corecte. 2.4.1. Compensarea erorilor geometrice i a deformaiei termice Erorile geometrice i variaiile de temperatur produc modificri dimensionale ale elementelor cuplei cinematice, care dac depesc anumite valori, modific caracterul ajustajului. Eliminarea acestui efect se realizeaz prin: - asigurarea unei precizii tehnologice adecvate; - asigurarea evacurii cldurii, deci limitarea variaiei temperaturii;
69
- adaptarea unor jocuri adecvate, care s compenseze modificrile dimensionale provocate de variaia temperaturii i de impreciziile tehnologice. 2.4.2. Compensarea deformaiilor elastice
Deformaiile elastice ale elementelor depind de rigiditile acestora i de valorile forelor radiale axiale i a momentului de ncovoiere, au ca efect neuniformitatea repartiiei forelor exterioare n zonele de contact ale cuplei ceea ce conduce la reducerea valorilor maxime ale forelor care pot fi transmise n condiii optime.
Fig. 1.10
70
Pentru compensarea deformaiilor elastice se prefer legturile fr efect cinematic, care pot mri capacitatea portant a cuplei; de asemenea raportul l/d nu poate depi valoarea 2 (l, d lungimea, respectiv, diametrul elementului deformabil al cuplei); creterea acestei valori poate conduce la neuniformiti ale repartiiei forelor exterioare n cuple. n general o cupl de rotaie poate transmite n condiii optime fore radiale medii - mari, momente ncovoietoare neglijabile i fore axiale mici; deci transmiterea, n condiii optime a forelor radiale foarte mari, a forelor axiale medii-mari i a momentelor ncovoietoare, presupune nlocuirea cuplei da rotaie prin policuple echivalente. n figura 1.10 se prezint cteva cuple cinematice pentru fore medii-mari. 2.4.3. Reducerea frecarii
Forele care acioneaz asupra unui element al unei cuple cinematice, pot fi descompuse n: - componente care se transmit prin cuple de la un element la altul; - componente care sunt produsul micrilor relative din cupl.
Fig. 1.11 Se consider cupla de rotaie din figura1.11, componentele radiale, axiale i momentul de ncovoiere se transmit de la un element la cellalt, iar componenta moment de torsiune M t genereaz micarea relativ de rotaie din cupl. Sub aciunea componentelor Fr, M i Fa n legturile cuplei apar fore, care n prezena frecrii, genereaz un moment de frecare, opus momentului exterior M t . Dac M t M f , atunci M f se transmite integral printre care de la un element la cellalt, iar dac M t > M f o parte (egal cu M f ) din
71
momentul exterior Mt se transmite de la un element la cellalt, iar restul ( M t M f ) genereaz micarea relativ din cupl. n concluzie, n prezena frecrii, forele de legtur cauzeaz apariia unor fore de frecare, care au ca efect: blocarea cuplei, cnd forele de frecare sunt superioare forelor exterioare care genereaz micarea relativ; diminuarea forelor exterioare, generatoare de micare, atunci cnd cele de frecare sunt mai mici; ncrcarea elementelor cu fore superioare; uzura suprafeelor n contact. Reducerea acestor efecte presupune msuri ca: limitarea forelor din legturi i (sau) utilizarea unor cuple de materiale adecvate, regiunii de ungere corespunztoare, tratamente termice adecvate, care s limiteze uzura, nlocuirea frecrii de alunecare prin frecare de rostogolire. Soluia inginereasc const n nlocuirea cuplei cinematice cu o policupl echivalent, avnd elemente de rostogolire. Reducerea pierderilor prin frecare, poate fi realizat pe dou ci: - prin corecta proiectare a cuplei care s asigure un regim de ungere corespunztor; - prin nlocuirea parial sau total a frecrii de alunecare prin frecare de rostogolire.
Fig. 1.12 n figura 1.12 se prezint, n funcie de modul de dispunere al elementelor de rostogolire, urmtoarele situaii - policuple cu un rnd de elemente de rostogolire, policuple cu doua sau multe rnduri de elemente de rostogolire dispuse n paralel i policuple cu mai multe rnduri de elemente de rostogolire dispuse mixt.
72
2.4.4. Policuple cinematice pentru mrirea capacitii portante Apar dou situaii distincte: - nlocuirea unei cuple cu contact punctual printr-o policupl echivalent, format prin agregarea n serie a unor cuple cu contact liniar i (sau) pe suprafa sau nlocuirea unei cuple cu contact liniar printr-o policupl format prin agregarea n serie a unor cuple cu contacte pe suprafa; - nlocuirea unei cuple cu contact pe suprafa printr-o policupl echivalent, format prin agregarea n paralel a unor cuple cu contacte pe suprafa. 2.4.5. Exemple de policuple cinematice Sunt prezentate cteva variante aplicate n practic ale unor policuple penta - mobile, tetramobile, trimobile, bimobile i monomobile. 2.4.5.1. Policuple cinematice pentamobile
n figura 1.13 se prezint dou variante constructive ale policuplei cinematice pentamobile echivalentei cuplei cilindru - cilindru (a), varianta (b) s-a obinut prin legarea n serie a unei cuple cilindrice (elementul 2, 1) cu o cupl sfer n cilindru (elementul 2, 3). Se poate obine i varianta (c) care permite transmiterea unei fore relativ mare, deci creterea capacitii portante, sau varianta (d) la care sunt reduse pierderile prin frecare.
b Fig.1.13
73
n figura 1.14, a, b, c, d, e, f, g sunt reprezentate dou scheme structurale (b, c) i patru variante constructive (d, e, f, g) ale policuplei cinematice echivalente cuplei sfer plan (a).
c Fig. 1.14
4.5.2.
Policuple cinematice tetramobile n figura 1.15, a, b, c, d, e, f este prezentat unul dintre cele mai frecvent ntlnite cazuri ale cuplei sfer n cilindru (a); n (b) policupla (3, 1) este format prin nscrierea unei cuple sferice (2, 1) cu o cupl cilindric (3,2).
f Fig. 1.15 S-a folosit contactul pe suprafa (c) sau chiar (d, e, f) introducerea elementelor cu rostogolire.
74
2.4.5.3.
Policuple cinematice trimobile
n figura 1.16, a, b, c, d, e sunt prezentate patru variante constructive uzuale de policuple cinematice cu elemente de rostogolire, echivalente cuplei sferice.
Fig. 1.16 De exemplu varianta (b, c, d) cunoscut i sub numele de rulmeni oscilani, pot transmite fore radiale de valori medii-mari i fore axiale mici, iar varianta (e), rulment oscilant coaxial-radial, poate transmite fore axiale mari i fore radiale mici-medii; policupla are o rotaie complet i dou oscilaii unghiulare de amplitudini foarte mici (sub 3 ... 5). n figura 1.17, a, b, c, d, e, f) este reprezentat alt exemplu de policupl sferic serie, echivalent cuplei sferice, utilizabil atunci cnd este nevoie de o rotaie complet, iar celelalte dou sunt oscilaii unghiulare de amplitudini mici (3 ... 5).
d Fig. 1.17
75
n figura 1.18, a, b, c, d, e sunt reprezentate patru scheme (b, c, d, e) ale unor policuple cinematice echivalente cuplei sferice (a) din care (b) i (c) sunt cu frecare de alunecare, iar (d) i (e) cu rostogolire.
d Fig.1.18 2.4.5.4. Policuple cinematice bimobile
n figura 1.19, a, b, c, d, e i figura 1.20, a, b, c, d, e, f, g sunt reprezentate variante de policuple bimobile. Pentru a reduce pierderile prin frecare, cupla cilindric figura 1.19, a poate fi nlocuit prin policuple cilindrice cu elemente de rostogolire (b, c, d, e, f ), care reduc frecarea de alunecare nu numai pentru rotaie, dar i pentru translaie. Ea poate transmite fore radiale ntr-o gam larg de valori, dac precizia tehnologic este suficient de ridicat, iar deformaiile elementelor sunt strict limitate
76
2.4.5.4.
Policuple cinematice bimobile
n figura 1.19, a, b, c, d, e i figura 1.20, a, b, c, d, e, f, g sunt reprezentate variante de policuple bimobile. Pentru a reduce pierderile prin frecare, cupla cilindric figura 1.19, a poate fi nlocuit prin policuple cilindrice cu elemente de rostogolire (b, c, d, e, f ), care reduc frecarea de alunecare nu numai pentru rotaie, dar i pentru translaie. Ea poate transmite fore radiale ntr-o gam larg de valori dac precizia tehnologic este suficient de ridicat, iar deformaiile elementelor sunt strict limitate.
Fig.1.19
e Fig. 1.20
77
Figura 1.20, a, b, c, d, e, f, g prezint policuple cilindrice-paralele, utilizate n locul cuplei cinematice, cnd este necesar transmiterea de momente ncovoietoare. 2.4.5.5. Policuple cinematice monomobile elicoidale n scopul reducerii pierderilor prin frecare, n locul cuplelor monomobile elicoidale se folosesc policuple elicoidale cu elemente de rostogolire fig. 1.21 i 1.22.
Fig. 1.21
Fig. 1.22
Astfel fig.1.21 prezint o variant cu bile i o alta cu role cilindroconice, o rol cilindro-conic 4 formeaz cu piulia 2 o policupl de rotaie rezultat prin legarea n paralel a doi rulmeni radiali cu ace 3, i a unui rulment axial 5, iar ghidarea urubului 1 i piuliei 2 se realizeaz cu ajutorul unei policuple cilindrice format prin legarea n paralel a doi rulmeni radiali cu ace.
78
Variantele prezentate n figura 1.22 ofer posibilitatea eliminrii jocurilor axiale, precum i transmiterea de fore axiale i radiale combinate cu momente ncovoietoare (radiale) de valori mici.
79
2.4.5.6.
Policuple cinematice monomobile de translaie
Fig. 1.23 De regul n cazul cuplelor monomobile, pe ling reducerea frecrii i creterea capacitii portante, se mai impune o cerin important, i anume: simplificarea tehnologic. Figura 1.23 prezint unele cuple monomobile de translaie, iar n figura 1.24 - policuple monomobile de translaie legate n paralel. Pentru lrgirea utilizrii policuplelor de translaie, enumerndu-se reducerea frecrii de alunecare, au fost concepute i realizate policuple cu elemente de rostogolire echivalente unor cuple i policuple utilizate n proiectarea ghidajelor, figura 1.25.
80
Fig. 1.24
Fig.1.25
81
2.4.5.7.
Policuple cinematice monomobile de rotaie
Aceste policuple se obin prin legarea n paralel a unor cuple i (sau) policuple cu suprafee de contact simple din punct de vedere tehnologic. n figura 1.26 sunt reprezentate principalele cuple utilizate, precum i forele medii - mari pe care le pot transmite n condiii optime; pentru fiecare din cuplele considerate s-a reprezentat, alturat, cte o policupl omoloag cu elemente de rostogolire.
Fig.1.26 2.5. Lan cinematic n teoria mecanismelor se opereaz cu reprezentri convenionale numite scheme. Pe acestea elementele se noteaz cu cifre arabe 1, 2, 3, ...,
82
iar cuplele cinematice cu litere mari ale alfabetului latin A, B, C, ... uneori cu indice. Schemele care respect o anumita scar se numesc scheme cinematice, iar dac nu, scheme structurale. Lanul cinematic reprezint un sistem format din mai multe elemente legate ntre ele. Pentru a clasifica lanurile cinematice, se definete noiunea de rang a unui element, care este egal cu numrul de cuple n compunerea crora intr elementul, atunci cnd face parte dintr-un lan cinematic. Lanurile cinematice pot fi: - simple, cnd fiecare element intr n compunerea a dou cuple cinematice, r 2, figura 1.27, a, b; - complexe, cnd au cel puin un element, care intr n compunerea a trei sau mai multe cuple cinematice, figura 1.27, c; - deschise, cnd formeaz contururi poligonale deschise, figura 1.27, a; - nchise, cnd formeaz contururi poligonale nchise, figura 1.27, b, r > 2.
b Fig. 1.27
83
Fig. 1.28 Multipleta sau n - pleta este o succesiune de n elemente legate ntre ele prin (n 1) cuple interioare propriu-zise figura 1.28. Uneori pot avea, iar uneori nu pot avea dou cuple exterioare - poteniale la capete, prin care se pot face legturile cu alte corpuri. Este posibil ca n lanurile cinematice complexe s existe mai multe contururi deformabile n timpul micrii elementelor. De fapt fiecare contur reprezint un lan cinematic simplu nchis (sau prin extindere deschis). n acelai fel se numete contur. 2.5.1. Gradul de libertate al lanului cinematic Fie un lan cinematic, cu n elemente rigide i cu ci cuple cinematice de clasa i = 1, 2, ..., 5, care leag elementele lanului cinematic considerat. Fiecare element considerat liber n spaiu are 6 grade de libertate, deci cele n elemente vor avea, n total, 6n grade de libertate. Dup legarea elementelor ntre ele prin cuple cinematice pentru a forma lanul se suprim S posibiliti de micare, deci gradul de libertate este dat de relaia: L = 6n S (1.1) Cele ci cuple cinematice suprim i ci posibiliti de micare, deci considernd c lanul cinematic conine cuple de toate clasele i = 1, 2, ..., 5 rezult:
S = ici ,
i =l
(1.2) (1.3.)
obinndu-se:
L = 6n ici ,
i =1
relaie care reprezint expresia gradului de libertate al unui lan cinematic oarecare. Dac lanul cinematic este plan, deci toate elementele se mic n plane paralele i avnd n vedere c planul impune trei condiii de legtur, precum i existena unor cuple cinematice de clasa 4 i 5, pentru gradul de libertate se obine relaia:
L = 3n (i 3)ci = 3n c4 2c5 .
i =4
(1.4)
84
2.5.2. Lanuri statice i hiperstatice Dac L = 0 lanul este static, fr micri relative, care se comport ca un singur solid rigid. Lanul poate s se mite n ntregime cu trei grade de libertate. Lanurile cinematice care au gradul de mobilitate negativ ( M 0 ) se numesc hiperstatice sau supraconstructive. n locul gradului de mobilitate se utilizeaz gradul de hiperstaticitate H = M 0 . Acest grad este egal cu numrul de ecuaii care se adaug celor statice pentru a se putea determina toate aciunile mecanice dintre elementele lanului; lanul este static nedeterminat. 2.6. Mecanism Mecanismul este un lan cinematic care satisface urmtoarele condiii: este nchis; are un element de referin, considerat fix, n raport cu el se studiaz micarea celorlalte elemente; - are un numr de elemente conductoare, astfel stabilite, nct micarea celorlalte s fie determinat. Mecanismul trebuie s fie desmodrom adic pentru legi de micare date elementelor motoare, toate celelalte au micri bine determinate. Deseori se ntlnete noiunea de cupl conductoare, n loc de element conductor. Cupla conductoare se caracterizeaz prin faptul c deplasarea relativ dintre elementele ce o formeaz, se obine prin antrenarea n micare a unui element n raport cu cellalt de ctre un motor. Practic cuplele conductoare sunt de clasa a 5-a, de rotaie sau de translaie. Trebuie menionat c exist o categorie restrns de mecanisme, mai ales cele utilizate n construcia roboilor industriali, care pot fi formate i din lanuri cinematice deschise. Un exemplu clasic de mecanism care are cupl conductoare de rotaie este reprezentat n figura 1.29, fiind format dintr-un lan cinematic nchis cu 4 elemente i 4 articulaii cu axele paralele, ceea ce fac ca elementele s aib deplasri paralele cu un plan fix. Elementul 4 este baza,
85
iar cupla A este conductoare, care este acionat de un motor rotativ (electric sau termic). Acest mod de acionare impune ca unul dintre elementele cuplei conductoare s fie batiul; elementul mobil al cuplei conductoare 1 se numete element conductor. Acest mecanism este desmodrom, ntruct configuraia patrulaterului ABCD este determinat, n fiecare moment al micrii, fiind dependent numai de unghiul de poziie 1 al elementului conductor, care are variaie controlat.
Fig. 1.29
Fig. 1.30
Figura 1.30 prezint un mecanism cu cilindru oscilant, care are 4 elemente i 4 cuple (3 cuple de rotaie cu axele paralele i o cupl de translaie cu axa perpendicular pe cele de rotaie). Ca i n cazul mecanismului patrulater, toate elementele mobile se deplaseaz paralel cu un plan fix; batiul este elementul 4, iar cupla de translaie B este conductoare. Acionarea mecanismului este pneumatic sau hidraulic; n aceast situaie cupla conductoare asociaz, n general, dou elemente mobile. Parametrul d12 are o variaie controlat, deci configuraia triunghiului ACD este determinat n fiecare moment, rezult c micarea mecanismului este determinat. Mecanismele se clasific n dou mari categorii: mecanisme, numai, cu cuple inferioare, cum sunt cele din figura 1.28 i 1.29; mecanisme cu cuple inferioare i superioare, i anume: a) cu came, figura 1.31; b) cu roi dinate, figura 1.32.
86
Fiecare dintre aceste categorii de mecanisme prezint o mare varietate de tipuri structurale.
Fig. 1.31 2.6.1. Grad de mobilitate
Fig. 1.32
Se cere s se stabileasc expresia gradului de mobilitate M al unui mecanism cnd se cunoate numrul n al elementelor sale i numrul ci al cuplelor cinematice de clasa i pe care le conine. Avnd n vedere definiia structural a mecanismului i considernd c la un lan cinematic se fixeaz un element, vor dispune 6 grade de libertate (n spaiu) adic: M = L6. (1.5) Introducnd (1.3) n relaia (1.5) rezult:
M = 6(n 1) ici ,
i =1
(1.6)
unde n reprezint numrul total al elementelor mecanismului (inclusiv elementul fix). Determinarea gradului de mobilitate se face n funcie de structura lanului cinematic i este legat de clasificarea mecanismelor n familii (clasificarea lui Dobrovolski). Familia unui mecanism este egal cu numrul de legturi comune la care sunt supuse elementele sale. Legtura comun este o micare elementar imposibil pentru toate elementele. Analiza micrilor (pentru identificarea legturilor comune, se face n raport cu un reper solidar cu unul dintre elemente. Existena legturilor comune este determinat de poziiile particulare ale suprafeelor care formeaz cuplele cinematice.
87
Dac se noteaz familia cu f, se consider c lanul cinematic se deplaseaz ntr-un spaiu cu (6 f ) grade de libertate, iar o cupl de o anume clas, ci , reduce (ci f) grade de libertate. Gradul de mobilitate se calculeaz cu formula: M = (6 f )(n 1 ) (5 f )(5 (4 f ))(4 (3 f ))(3... (1.7)
Un lan cinematic sau un mecanism nu poate conine cuple de o clas egal sau mai mic dect familia sa. Cunoaterea gradului de mobilitate al unui mecanism este important, ntruct indica numrul cuplelor conductoare, acesta este egal cu gradul de mobilitate. Dac gradul de mobilitate este zero, sistemul mecanic analizat formeaz o construcie rigid, iar dac este negativ, sistemul este static nedeterminat.
Fig. 1.33 n cele ce urmeaz se vor analiza cteva mecanisme, urmrindu-se stabilirea familiei i determinarea gradului de mobilitate. De exemplu: pentru mecanismul patrulater articulat spaial, micrile elementare ale elementelor raportate la un sistem de axe de coordonate solidar cu batiul sunt puse n eviden n figura 1.33. Deoarece elementul 2 are o micare general spaial, cu componente de rotaie i translaie n raport cu toate
88
axele, mecanismul nu are legturi comune i este de familia zero (f = 0), rezultnd: n = 4, c5 = 2(A, D), c4 = 1(B), c3 = 1(); M = 6(n 1) 5c5 4c4 3c 3 2o 2 4 = l.
Fig.1.34 n cazul mecanismului din figura 1.34, elementul 2 are un bra care rmne permanent paralel cu axa Oz (nu execut rotaii n jurul axelor Ox i Oy) i un bra paralel cu axa Oy (nu execut rotaii n jurul axelor Ox i Oz). Rezult c elementul n ansamblu nu poate executa rotaii, avnd o micare de translaie spaial. Mecanismul are familia: f = 1, n = 4, c5 = 2(A, D), c4 = 2(B, C). M = 5(n 1) 4c5 3c4 2c3 c2 = 1 (1.8) Mecanismele cu utilizarea cea mai rspndit fac parte din familia a 3a, din aceast categorie fac parte mecanismele plane i sferice. Mecanismele plane se caracterizeaz prin faptul c toate elementele se deplaseaz paralel cu un plan fix. n structura lor se folosesc numai cuple plane (de rotaie, de translaie i cuple superioare de clasa 4-a) astfel amplasate, nct axele articulaiilor i ale cilindrilor care formeaz cuplele superioare s fie paralele ntre ele i perpendiculare pe axele cuplelor de translaie. Micarea plan paralel este caracterizat, prin trei micri, celelalte, tot trei, sunt legturi comune, f = 3. n figura 1.35 este reprezentat mecanismul manivel piston, care are urmtoarele caracteristici structurale: n = 4, c5 = 4(A, B, C, D),
89
M = 3(n 1) 2c5 c4 = 1. Ca element conductor se poate utiliza fie elementul 1 (fig.1.35 a), fie elementul 3 (fig.1.35, b).
b Fig.1.35 Mecanismul manivel piaton
Construcia din figura 1.36 este format din trei elemente legate prin trei articulaii cu axele paralele: n = 3, c5 = 3 (A, B, C), M = 3(n 1) 2c5 c4 = 0 Rezult c acest sistem nu este un mecanism, ci o construcie rigid. Deci, triunghiul articulat este deformabil i trebuie interpretat ca un singur element.
a Fig. 1.36
Mecanismele sferice se caracterizeaz prin faptul c toate elementele au un punct fix comun, deci traiectoriile sunt situate prin sfere concentrice. Micrile elementelor au numai componente de rotaie, astfel c cele trei translaii constituie legturi comune. n figura 1.37 este reprezentat cuplajul cardanic, care este un mecanism sferic, avnd f = 3, n = 4, c5 = 4 (A, B, C, D), M = 1.
90
n familia a 4-a se ncadreaz, printre altele, mecanismele plane care conin numai cuple de translaie.
Fig. 1.37
Fig. 1.38
n afar de legturile comune specifice mecanismelor plane, n acest caz mai intervine una: rotaia n jurul axei perpendiculare pe planul micrii (fig. 1.38): n = 3, c5 = 3(A, B, C), M = 2(n 1) c5 = 1. 1.6.2. Situaii particulare n determinarea gradului de mobilitate Sunt situaii cnd formulele structurale pentru calculul gradului de mobilitate duc la rezultate eronate sau contradictorii. Una din cauzele care provoac aceast situaie este existena n structura mecanismului a lanurilor cinematice pasive. Aceste lanuri cinematice intervin prin caracteristicile lor (numrul de elemente i de cuple) n procesul de determinare a gradului de mobilitate, dar prezena lor nu influeneaz cinematica mecanismului din care fac parte. Comportarea pasiv a acestor lanuri cinematice este legat de anumite particulariti constructive ale mecanismului. De exemplu pentru mecanismul din figura 1.39, calculnduse gradul de mobilitate; n = 5, c5 = 6(A, B, C, D, E, F) rezult M = 3(n l) 2c5 = 0, lucru inexact, ntruct sistemul este mobil, iar micarea sa este determinat dac se adopt un element conductor. Aceast contradicie se explic prin existena lanului cinematic pasiv format din elementul 5 i cuplele E i F;
91
este necesar ca distana dintre punctele E i F s fie egal cu lungimea elementului 5. Condiia are caracter pasiv (de prisos) pentru c n absena lanului cinematic menionat, distana este chiar mrimea 1EF.
b Fig.1.39
ntruct existena acestui lan nu are nici o influen asupra comportrii cinematice a mecanismului, gradul de mobilitate se calculeaz dup eliminarea lanului cinematic pasiv. Rezult: n = 4, c5 = 4(A,B,C,D), M = 3(n 1) 2c5 = 1. O situaie deosebit intervine n cazul unor mecanisme care au un numr de elemente conductoare inferior gradului de mobilitate. n structura acestor mecanisme intr elemente cu micare nedeterminat, care nu mpiedica funcionarea corect (mobilitate pasiv). Mobilitile pasive se pot elimina prin mrirea clasei unei cuple sau prin blocarea sa. De exemplu n figura 1.40 sunt prezentate dou mecanisme cu cam, la care intervine particularitatea menionat mai sus. Mecanismul cu cam din figura 1.40,a are n = 4, c5 = 3(A, B, D), c4= 1(B), M = 3(n 1) 2c5 c4 = 2 Cu toate acestea mecanismul are un singur element conductor 1, rola 2 avnd o mobilitate pasiv rotaia n jurul axei proprii, care nu influeneaz micarea determinat a elementului 3, numit tachet.
92
Fig. 1.40 Dac se blocheaz articulaia C se obine mecanismul din figura 1.40, b, la care: n = 3, c5 = 2(A,B), c4 = l(B), M = 3(n 1) 2c5 c4 = l. Mobilitatea pasiv este util, ntruct rola transform frecarea de alunecare n cea de rostogolire, cu efecte pozitive privind reducerea uzurii. Mecanismul din figura 1.41 este o variant a patrulaterului articulat spaial de familia zero: n = 4, c5 = 2(A, D), c3 = 2(B, C); M = 6(n l) 5c5 4c4 3c3 2c2 c1 = 2.
93
Fig.1.41 Mecanismul din figura 1.41 este o variant a patrulaterului articulat spaial de familia zero: n = 4, c5 = 2(A, D), c3 = 2(B, C); M = 6(n l) 5c5 4c4 3c3 2c2 c1 = 2. Mecanismul din figur are un singur element conductor, iar elementul 2 are o rotaie pasiv n jurul axei ce trece prin centrala articulaiilor B i C. Dac articulaia sferic B se transform ntr-o cupl de clasa 4-a, se obine mecanismul din figura 1.33. 2.6.3. Transformarea cuplei superioare Mecanismele plane de familia a 3-a pot avea trei tipuri de cuple cinematice: de rotaie, de translaie (ambele de clasa 5-a i inferioare) i cuple superioare de clasa 4-a. Cuplele superioare se pot transforma n lanuri cinematice, care conin numai cuple inferioare. Dar aceast transformare presupune satisfacerea urmtoarelor condiii: a) condiia structural, care nseamn pstrarea neschimbat a gradului de mobilitate al mecanismului;
94
b) condiia cinematic, care impune meninerea acelorai micri relative ntre elemente. Din prima condiie se determin caracteristicile structurale ale lanului cinematic nlocuitor. Fie un mecanism cu n elemente, c5 cuple de clasa 5-a i c4 cuple de clasa 4-a. Una dintre cuplele de clasa 4-a se transform ntr-un lan cinematic avnd n' elemente i c 5, cuple de clasa 5-a. Pe baza condiiei structurale se poate scrie: 3(n l ) 2c5 c4 = 3(n + n' - 1) 2(c5 c 5) (c4 1), de unde rezult: 3n' 2 c 5H = 0 (1.9) Ultima relaie (1.9) permite determinarea lui n' i c 5 , dar din infinitatea de soluii posibile intereseaz practic, cea mai mic soluie ntreag i pozitiv: n'=1, c 5=2. Parametrii constructivi (geometrici) ai lanului nlocuitor se determin din condiia cinematic. Fie o cupl superioar, figura 1.42, format din elementele 1 i 2, dac se impune o deplasare infinit de mic, atunci micarea relativ dintre elemente nu se modific, atunci cnd ambele c1 i c2 , sunt dou cercuri avnd razele egale cu cele de curbur n punctul de contact A.
a Fig. 1.42
95
Dac se consider cupla superioar definit cu ajutorul cercurilor, rezult c distana BC dintre centrele lor rmne constant n timpul micrii. Aceast condiie trebuie ndeplinit i dup transformarea cuplei superioare, iar pentru aceasta elementul unic (n' = 1) al lanului cinematic nlocuitor trebuia s se lege de elementele 1 i 2 prin dou cuple de rotaie (c 5 = 2) situate n centrele de curburi B i C, figura 1.42. Astfel lungimea elementului 3 este egal cu suma razelor de curbur BC = 1 + 2. Rezult c transformarea cuplei superioare are un caracter instantaneu, ntruct odat cu schimbarea poziiei mecanismului se modific i razele de curbur. Mecanismul obinut dup nlocuirea cuplei superioare este invariabil numai cnd curbele (c1) i (c2) au curbur constant, deci cercuri drepte = sau degenereaz n puncte ( = 0) Dac una din curbe este dreapt, centrul de curbur este aruncat la infinit, iar articulaia care trebuie plasat n acest punct se transform ntr-o cupl de translaie avnd axa paralel cu dreapta respectiv. Cnd una dintre curbe se reduce la un punct, acest punct este chiar centrul de curbur. n tabelul 1.4 se prezint modul de transformare a cuplei superioare pentru toate cazurile reprezentative.
96
Tabelul 1.4 Cazuri reprezentative de transformare a cuplei superioare
97
2.7.
Grup structural
Grupa structural este un lan cinematic care face parte dintr-un mecanism, avnd urmtoarele proprieti: a) are un numr de cuple conductoare egal cu gradul de libertate; b) are un numr de cuple exterioare cu ajutorul crora se leag de mecanism; c) nu se poate descompune n grupe structurale mai simple. Grupele structurale cu M = 0 se numesc grupe Assur, iar cele cu M 0 se numesc grupe conductoare. ntruct noiunea de grup structural se folosete mai ales pentru studiul mecanismelor cu cuple inferioare, n compunerea grupelor structurale se consider numai astfel de cuple. 2.7.1. Grupele Assur
Din condiia de definiie a grupelor Assur:
L = 3n 2c5 = 0 ,
(1.10)
se poate stabili numrul de elemente i de cuple de fiecare clas ale acestor grupe. Cele mai mici soluii ntregi i pozitive sunt: n c5 2 3 4 6 6 9 8 ... 12 ... (1.11)
Fiecare soluie numeric conduce la una sau mai multe soluii structurale, adic scheme structurale distincte. n tabelul 1.5 sunt prezentate soluiile structurale pentru n = 2, 4, care sunt, de fapt, cele de importan practic. Grupele Assur se clasific n clase i ordine. Clasa unei grupe se stabilete astfel: - dac grupa conine contururi nchise deformabile, clasa este egal cu numrul maxim de laturi ce caracterizeaz aceste contururi; - dac grupa nu conine astfel de contururi, clasa este egal cu rangul maxim al elementelor.
98
Tabelul 1.5 Soluii structurale
Tabelul 1.6 Aspecte ale grupei de clasa 2-a, ordinul 2
99
Ordinul este egal cu numrul cuplelor exterioare. n tabelul 1.5 s-au presupus, pentru simplificare, numai cuple de rotaie, dar este posibil ca fiecare grup s poat conine att cuple de rotaie, ct i de translaie. Prin combinarea celor dou tipuri de cuple de clasa 5-a se obin, pentru fiecare soluie structural, un numr de variante numite aspecte. n tabelul 1.6 se reprezint aspectele grupei de clasa 2-a, ordinul 2. Tabelul arat i formele degenerate ale grupelor, caracterizate prin faptul c unele dimensiuni sunt egale cu zero. Aceste forme au o deosebit importan practic, ntruct sunt avantajoase din punct de vedere al aciunii forelor asupra elementelor. 2.7.2. Grupe conductoare cu L = 1
Numrul de elemente i de cuple rezult din condiia:
L = 3n 2c5 = 1
cu soluiile: n c5 1 1 3 4 5 7 ... ...
(1.12)
Soluiile structurale pentru primele dou soluii numerice sunt prezentate n tabelul 1.5. Grupa conductoare de clasa 1-a, ordinul 1 are o singur cupl, care este exterioar i conductoare. n marea majoritate a cazurilor aceasta este o cupl de rotaie, iar acionarea ei se face cu motor rotativ. Grupa conductoare de clasa 2-a, ordenul 2 este o cupl conductoare (B), format din dou elemente mobile (l i 2). n aceast situaie cupla conductoare este de translaie, iar acionarea este hidraulic sau pneumatic.
100
2.8. Formarea mecanismelor. Descompunerea n grupe structurale Dup cum s-a menionat, grupa structural trebuie interpretat ca un lan cinematic component al unui mecanism. Operaia de asamblare a grupelor structurale pentru constituirea mecanismelor se realizeaz avnd la baz urmtorul principiu de formare. Orice mecanism se poate forma prin legarea succesiv de grupe structurale pornind de la elementul fix. nelegerea principiului de formare comport unele precizri suplimentare. Astfel n faza iniial se consider elementul fix (baza), dup care se leag, succesiv, prin intermediul cuplelor exterioare, grupele exterioare. Dup anexarea unei noi grupe se obine un nou mecanism, din ce n ce mai complex. Legarea unei grupe trebuie s se fac, prin toate cuplele exterioare la mecanismul format n etapa precedent, deci nu trebuie s rmn cuple libere. Gradul de mobilitate al mecanismului obinut este egal cu suma gradelor de libertate ale grupelor componente. Se menioneaz faptul c modul de formare al unui mecanism este unic. Deci, nu este posibil de a se obine acelai mecanism folosind grupe structurale diferite sau succesiuni diferite de legare a acestora. De exemplu n figura 1.43 se prezint formarea unui mecanism din componena unei maini textile, iar n figura 1.44 un mecanism de ncrctor, n figura 1.45 se arat modul de formare al mecanismelor fundamentale cu ajutorul grupelor de clasa a 2-a, ordinul 2 i de cele cinci aspecte, iar n figura 1.46 se indic modul de formare al mecanismului presei cu aer. Sunt necesare dou observaii:
a) daca un element cinematic se leag de restul mecanismului prin cuple de translaie este necesar ca ghidajele acestor cuple s nu fie paralele; b) un poligon al lanului cinematic plan trebuie sa aib n structura sa cel puin dou cuple de rotaii. 101
Fig.1.43. 102
Operaia invers formrii este descompunerea mecanismelor n grupe structurale ce pun n eviden grupele structurale care particip la formarea mecanismului. n urma descompunerii fiecrui mecanism i se atribuie o clas egal cu clasa maxim ntlnit la grupele componente. n tabelele 1.7 i 1.8 se prezint modul de descompunere n grupe structurale ale celor mai uzuale mecanisme cu M = 1, lund n considerare diverse posibiliti de alegere a cuplei conductoare. Grupele structurale sunt identificate cu ajutorul simbolului numeric specificat n tabelul 1.4. Tabelul 1.7. Descompunerea unor mecanisme uzuale
Cunoaterea structurii mecanismelor din punct de vedere al grupelor componente are consecine importante pentru analiza cinematic i cinetostatic. Grupele structurale sunt sisteme determinate din punct de vedere cinematic i cinetostatic.
103
Tabelul 1.8. Descompunerea unor mecanisme uzuale
Ca urmare ele pot fi studiate independent de restul mecanismului, iar pentru fiecare grup se poate stabili un procedeu de analiz propriu, specific.
Fig. 1.44 Analiza unui mecanism se desfoar n dou etape: a) descompunerea n grupe structurale; b) aplicarea pentru fiecare grup component, a procedeului de calcul specific. Acest mod de abordare a problemei prezint avantaje importante, deoarece numrul de grupe uzuale, deci de procedee de calcul care trebuie cunoscute, este redus, iar numrul i varietatea de mecanisme ce se pot forma cu ajutorul lor este foarte mare. n plus metoda se preteaz foarte bine la aplicarea procedeelor automate de calcul n analiza mecanismelor.
104
Fig. 1.45
a Fig. 1.46
105
Fig. 1.47 2.9. Dezvoltarea fusurilor i degenerarea cuzineilor
n analiza structural a mecanismelor plane nu s-a fcut nici o precizare cu privire la dimensiunile fusurilor i a bucelor cuplelor de rotaie. Dac, de exemplu, n lanul cinematic din figura 1.47, raza rA devine rA > OA, se obine discul excentric 1, care va antrena elementul 2, iar daca raza r0 devine r0 = OA, se obine culisa circular 1, care antreneaz elementul 2. Rezult c mecanismele obinute prin dezvoltarea fusurilor i degenerare, respectiv, formeaz mecanisme cu fusuri nedezvoltate i buce nedegenerate. 2.10. Generalizarea noiunii de grup structural Noiunea de grup structural se poate generaliza i la mecanismele spaiale, deci altele dect cele din familia a 3-a. n primul rnd se nlocuiesc cuplele de alte clase cu lanuri cinematice ce conin numai cuple de clasa a 5-a. Relaia de legtur dintre numrul n de elemente i numrul c5 de cuple cinematice de clasa a 5-a ale unei grupe de o anumit familie m rezult: 5m n= (1.13) c5 . 6m
106
2.11.
Construirea raional a mecanismelor
Orice mecanism poate fi ncadrat, datorit toleranelor de execuie, n familia zero i avnd un anumit numr q de legturi pasive. Gradul de mobilitate al mecanismelor se determin pe baza acestui raionament, cu relaia:
M = 6n ici + q .
i =l
(1.14)
Astfel la mecanismul patrulater din figura 1.48, a M = l, n = 5, c5 = 4 are q = 3 legturi pasive. Pentru ca mecanismul patrulater s fie construit raional fig.1.46, b, deci q = 0, este necesar ca n locul a dou cuple de clasa a 5-a s se pun o cupl de clasa a 4-a n B (care elimina o legtur pasiv) i o cupl de clasa a 3-a n A (care elimin dou legturi pasive). La acelai rezultat s-ar ajunge dac n locul unei cuple de clasa a 5-a s-ar pune o cupl de clasa a 2-a (care elimina trei legturi pasive).
a Fig. 1.48 2.12.
b Optimizarea structural
Una din cile eficiente de mrire a fiabilitii i de reducere a preului, aplicabil att la proiectarea, ct i la perfecionarea mecanismelor existente, o constituie optimizarea structural. Ea reprezint modalitatea
107
tehnico-economic de eliminare a efectelor, neconcordanelor dintre modelul teoretic i cel real. Aceasta presupune dou etape: a) optimizarea cuplelor, problem deja lmurit n paragraful 2.4; b) optimizarea structural a mecanismului, n ipoteza c deja cuplele sunt izostatice, adic determinate static; Rezolvarea celei de a doua etape presupune: identificarea legturilor hiperstatice, deci a gradului de hipostaticitate; identificarea defectelor structurale; eliminarea legturilor hiperstatice; eliminarea defectelor structurale. 2.12.1. Identificarea legturilor hiperstatice sau supraconstrnse
Legturile hiperstatice i deci a gradului de hiperstaticitate se obin n urmtoarele situaii: a) legarea n paralel a doua lanuri cinematice elementare deschise, obinute din lanul iniial nchis, prin ruperea a dou elemente neadiacente; b) legarea n paralel a unei cuple cinematice cu un lan cinematic deschis, ambele obinute din lanul iniial prin ruperea a dou elemente adiacente; c) legarea n paralel a unui lan cinematic deschis obinut din lanul iniial nchis, prin ruperea unui singur element cu o cupl cinematic, obinut prin sudarea la loc a celor dou pri ale elementului rupt. Se menioneaz faptul ca legturile hiperstatice nu influeneaz transmiterea micrilor i forelor, dar sunt caracterizate prin apariia unor fore nedeterminate, (fore ce nu pot fi determinate din ecuaiile de echilibru ale elementelor). 2.12.2. Indentificarea defectelor structurale
Defectele structurale sunt legturile care n modelul teoretic sunt cinematic pasive (hiperstatice) i care n condiii reale influeneaz negativ realizarea, funcionarea i ( sau) durabilitatea mecanismului.
108
De regul, teoretic, execuia mecanismului se consider ideal, adic deformaiile elastice i termice sunt nule, frecrile inexistente, n cazul, n care legturile cinematice pasive nu influeneaz transmiterea micrilor i forelor. De exemplu n figura 1.49 este redat mecanismul biel-manivel, la care axa cuplelor de rotaie A, B i C sunt paralele, direcia cuplei de translaie D este perpendicular pe axele de rotaie, jocurile i frecrile n cuple sunt nule; gradul de mobilitate este M = 1, iar gradul de hiperstaticitate S = 3. n condiii reale, cnd sunt inevitabile abaterile de execuie n montaj, iar n funcionare apar deformaii elastice i termice, pot s apar erori de la condiiile specifice ale modelului structural al mecanismului. Aceasta nseamn ca arhitectura real a mecanismului descris prin configuraia axelor de rostogolire i direcia cuplei de translaie se abate de la arhitectura teoretic, figura I.50. De fapt trecerea de la condiiile teoretice la cele reale, un numr dintre legturile cinematic pasive ale mecanismului teoretic, tind s devin active, iar celelalte legturi cinematice pasive rmase tind s introduc o stare de supratensiune n mecanism (prin deformarea elastic i termic a elementelor); poate s apar tendina de blocare, solicitare, imposibilitate de montaj.
Fig. 1.49
Fig. 1.50
109
Evitarea acestor defecte se poate face prin eliminarea total a legaturilor hiperstatice, adic proiectarea i realizarea de mecanisme static determinate, numite legturi hiperstatice. 2.12.3. Eliminarea legturilor hiperstatice
Eliminarea legturilor hiperstatice se realizeaz introducnd n cuple mobiliti suplimentare, figura 1.51. 2.12.4. Eliminarea defectelor structurale
Dup cum s-a artat arhitectura teoretic a unui mecanism presupune: elemente nedeformabile, legturi ideale, bilaterale, olonome liniare i scleronome, tehnologie de realizare perfect. n aceste condiii legturile mecanismelor pot fi active (independente) i pasive (dependente sau hiperstatice); cuplele cinematice se consider izostatice. n condiii reale apar unele abateri cauzate de impreciziile tehnologice, de deformaiile elementelor i de efectele frecrii. n condiii teoretice legturile mecanismelor, funcie de rolul lor cinematic pot fi active (legturi independente) i pasive (legaturi dependente sau hiperstatice).
Fig.1.51
110
n condiii reale atunci cnd abaterile depesc o anumit valoare, peste limitele admise, o parte din legturile pasive se transform n legturi duntoare, care influeneaz negativ micrile permise i forele transmise de legturi. Legturile cinematic pasive, care n condiii reale, devin duntoare se numesc defecte structurale. n opoziie cu legturile cinematic pasive, care pot fi utile (pot contribui) la transmiterea forelor i la simplificarea constructiv a mecanismului, defectele structurale, coroborate cu deformaiile materialului i cu influena frecrii snt duntoare pentru funcionarea normal i deci pentru fiabilitatea mecanismului. Soluiile pentru evitarea defectelor structurale sunt: a) asigurarea unor condiii de proiectare, tehnologice i de funcionare ct mai apropiate de cele teoretice, ceea ce din punct de vedere economic nseamn o cretere nsemnat a preului; b) eliminarea tuturor legturilor cinematice pasive, ceea ce nseamn creterea complexitii constructive i, deci, a preului. Se observ c ambele direcii satisfac criteriile tehnice de optimizare, dar sunt costisitoare din punct de vedere economic, mai ales prima soluie. Soluia optim o constituie eliminarea muncii a unora din legturile pasive, care n anumite condiii devin defecte structurale. 2.12.5. Exemple de optimizare structural
n cele ce urmeaz se prezint cteva exemple clasice de optimizare structural i anume: pentru mecanismul cu urub, din componena meselor mainilor unelte i un mecanism cu pene pentru perforarea gurilor la piese ambutisate. n figura 1.52 se prezint un mecanism cu urub, pentru acionarea mesei la maini unelte; n figura 1.52 a, este redat varianta constructiv, iar n 1.52 b, c, schema cinematic. Se observ urmtoarele particulariti: masa 2 i batiul 0 au rigiditi mult superioare urubului 1, iar jocul din policupla de translaie mas-batiu este controlabil i este meninut la valori reduse; deci forele i momentele se transmit batiului prin legaturile policuplei de translaie;
111
Fig. 1.52 tehnologia este suficient de precis, astfel nct pentru toate reperele de ncrcare i curse nu prea mari ale masei, configuraia axelor cuplelor este cu abateri suficient de mici fa de configuraia teoretica. Optimizarea cuplelor mecanismului, fig. 1.52 c, d, impune nlocuirea cuplei elementare (2), printr-o cupl real. n figura 1.53 a, b, este reprezentat o variant constructiv a mecanismului de perforat guri, iar n 1.53 c, d,
112
perfecionarea acestuia. Varianta a, b, este destinat pentru ambutisarea pieselor din tabl subire, iar c, d, pentru piese mai groase.
113
Fig. 1.53
114
n figura 1.54 este reprezentat o variant constructiv a unui mecanism manivel-culisor utilizat n prese cu aciune simpl, varianta clasic i cea optimizat.
Fig. 1.54
115
2.12.6.
Analiza structural a mecanismelor compuse
Mecanismul compus este lanul cinematic compus care, n raport cu unul din elementele sale componente, poate transmite determinat micri i ( sau ) fore mecanice, pentru ndeplinirea unei funcii necesare. Lanul cinematic compus, numit lan cinematic complex, rezult prin compunerea de lanuri cinematice elementare, de fapt lanul cinematic compus este un agregat de lanuri cinematice. Se deosebesc: a) lanuri cinematice compuse nchise, denumite i lanuri cinematice policontur; b) lanuri cinematice compuse deschise. Lanurile cinematice policontur se obin prin compunerea lanurilor cinematice monocontur, iar lanurile cinematice compuse deschise se obin prin compunerea de lanuri elementare nchise i deschise. Avnd n vedere aceast clasificare se disting mecanisme compuse nchise denumite mecanisme policontur, ntlnite de regul n construcia de maini i mecanisme compuse deschise, utilizate mai ales la roboii industriali. n general analiza structural a unui mecanism compus comport urmtoarele etape: a) analiza structural a dezagregrii mecanismului compus n subsisteme componente; b) analiza structural a subsistemelor rezultate prin dezagregarea mecanismului compus; analiza structural a agregrii subsistemelor componente. S-au impus dou metode de baz distincte: a) metoda dezagregrii mecanismelor compuse n mecanisme componente; b) metoda dezagregrii mecanismelor n lanuri cinematice deschise. Identificarea mecanismelor elementare din componena unui mecanism compus se face prin identificarea contururilor nchise independente i ai arborilor simpli asociai mecanismului compus; fiecare ciclu (contur nchis) modeleaz un mecanism monocontur, iar fiecare arbore simplu un mecanism elementar deschis. Spre deosebire de mecanismele compuse nchise (policontur, mecanismele compuse deschise conin att mecanisme elementare nchise (monocontur), ct i mecanisme elementare deschise.
116
Analiza mecanismelor elementare rezultate prin descompunerea unui mecanism compus se analizeaz structural, adic parcurgerea urmtoarelor etape: se stabilete gradul de mobilitate pentru fiecare mecanism component; se verific ndeplinirea condiiilor de existen a mecanismului, denumite condiii structurale de funcionare; se identific legturile hipostatice ale fiecrui mecanism component. Dac ne referim la agregatele de mecanisme, atunci analiza structural presupune parcurgerea urmtoarelor etape: se stabilete gradul de mobilitate M al agregatului obinut prin cuplarea mecanismelor componente; - figura se verific dac agregatul de mecanisme ndeplinete condiia structural de existen, M > 0.
117
S-ar putea să vă placă și
- Inginerie Mecanica M5Document4 paginiInginerie Mecanica M5Burdusa AdyÎncă nu există evaluări
- Mecanisme Si Organe de MasiniDocument19 paginiMecanisme Si Organe de MasiniOltenacu Luminita Valentina100% (3)
- PROIECT MecanismeDocument13 paginiPROIECT MecanismeMunteanu Sebastian100% (3)
- Mecanisme Si Organe de MasiniDocument53 paginiMecanisme Si Organe de MasiniRadu PandaÎncă nu există evaluări
- Analiza Structurala MecanismeDocument22 paginiAnaliza Structurala MecanismeSabyna IoanaÎncă nu există evaluări
- Examen Intrebari MADocument47 paginiExamen Intrebari MAНикита ГрабчукÎncă nu există evaluări
- 1 Notiuni Si Definitii FundamentaleDocument29 pagini1 Notiuni Si Definitii FundamentaletarnaÎncă nu există evaluări
- Proiect Mecanisme Sem. IIDocument26 paginiProiect Mecanisme Sem. IIGabriel PetreaÎncă nu există evaluări
- Teoria Mecanismelor Si Masinilo PDFDocument195 paginiTeoria Mecanismelor Si Masinilo PDFAdriana VulpeanuÎncă nu există evaluări
- Teoria Mecanismelor Si Masinilor Indrumar de ProiectareDocument195 paginiTeoria Mecanismelor Si Masinilor Indrumar de ProiectareevgheniiiÎncă nu există evaluări
- Mecanisme Curs TCMDocument61 paginiMecanisme Curs TCMCătălina BrîndaşÎncă nu există evaluări
- AR 2018-2019 Curs Mecanisme Studenti-1Document218 paginiAR 2018-2019 Curs Mecanisme Studenti-1Andrei123Încă nu există evaluări
- TEMA 2 Mecamnisme Si SA 11 09 2022Document27 paginiTEMA 2 Mecamnisme Si SA 11 09 2022Vladina TutunaruÎncă nu există evaluări
- Proiect MecanismeDocument17 paginiProiect MecanismeDany Marius100% (1)
- Curs MecanismeDocument23 paginiCurs MecanismeCatalinÎncă nu există evaluări
- Toate Cursurile MecanismeDocument367 paginiToate Cursurile MecanismeVladMartisÎncă nu există evaluări
- 1.lanturi CinematiceDocument9 pagini1.lanturi CinematiceAnastasiaÎncă nu există evaluări
- Mecanisme Slide Cap 2Document70 paginiMecanisme Slide Cap 2cristiÎncă nu există evaluări
- FIABILITATEDocument11 paginiFIABILITATEmaura1993100% (1)
- Cursuri MecansmeDocument209 paginiCursuri MecansmeGheorgheÎncă nu există evaluări
- Mecanisme Slide Cap 2Document70 paginiMecanisme Slide Cap 2gepo50100% (2)
- C4 ModelareaDocument30 paginiC4 ModelareaSaftaMariusÎncă nu există evaluări
- Cursuri OMDocument454 paginiCursuri OMAlextzu AlextzuÎncă nu există evaluări
- Structuri Mecanice Utilizate În Construcţia Roboţilor IndustrialiDocument11 paginiStructuri Mecanice Utilizate În Construcţia Roboţilor IndustrialiSaliu Viorel100% (1)
- Suport Curs - Mecanica Robotilor PDFDocument114 paginiSuport Curs - Mecanica Robotilor PDFWilliam JonesÎncă nu există evaluări
- MECS Curs 4Document12 paginiMECS Curs 4anamariacurmeiÎncă nu există evaluări
- Generalitati Organe de MasiniDocument5 paginiGeneralitati Organe de MasiniNicoleta Melinte100% (1)
- Referat FiabilitateDocument10 paginiReferat FiabilitateDorinaDuca0% (1)
- Proiect Mat DidacticDocument22 paginiProiect Mat DidacticAndrei ChimoaicaÎncă nu există evaluări
- Elemente Componente Ale Unei Ansamblari Mecanice. Organe de MasiniDocument24 paginiElemente Componente Ale Unei Ansamblari Mecanice. Organe de MasiniDavision ProiectÎncă nu există evaluări
- 18 L41Document9 pagini18 L41Kro LineÎncă nu există evaluări
- #3mecanism. Principiul Formarii Mecanismelor.Document5 pagini#3mecanism. Principiul Formarii Mecanismelor.Nick MunteanÎncă nu există evaluări
- 7analiza Structurală A MecanismelorDocument28 pagini7analiza Structurală A MecanismelorhopeÎncă nu există evaluări
- Subiecte Rezolvate La BSADocument14 paginiSubiecte Rezolvate La BSABotez Ana-MariaÎncă nu există evaluări
- MomDocument175 paginiMomCristian KenÎncă nu există evaluări
- Teoria Sistemelor - Sinteza de CursDocument76 paginiTeoria Sistemelor - Sinteza de CursCosmin SbÎncă nu există evaluări
- Ad de MobilitateDocument2 paginiAd de MobilitateSilviu CristianÎncă nu există evaluări
- Rezumat Curs MecanismeDocument126 paginiRezumat Curs MecanismeAspect97Încă nu există evaluări
- L1 Structura MecanismelorDocument4 paginiL1 Structura MecanismelorDeny DenysaÎncă nu există evaluări
- Curs VI PMH Sisteme AutomateDocument29 paginiCurs VI PMH Sisteme AutomateCălin LaurențiuÎncă nu există evaluări
- Actionari ElectriceDocument319 paginiActionari ElectriceMarius Scobiola100% (4)
- Proiect - Mecanisme - 1Document36 paginiProiect - Mecanisme - 1MihaiBuleu100% (1)
- Robotica PDFDocument94 paginiRobotica PDFConstantin Marius-CristianÎncă nu există evaluări
- Fiabilitatea de Alimentare in ElectrotehnologiiDocument195 paginiFiabilitatea de Alimentare in Electrotehnologiitolian1306Încă nu există evaluări
- TemaDocument34 paginiTemaNeamtu Sabin MarianÎncă nu există evaluări
- Curs 4-5Document28 paginiCurs 4-5Alin AlinÎncă nu există evaluări
- Documents - Tips - Proiect Mecanismul Surub PiulitaDocument35 paginiDocuments - Tips - Proiect Mecanismul Surub PiulitaGheorghiu AndreeaÎncă nu există evaluări
- 02 Structura MecanismelorDocument11 pagini02 Structura MecanismelordragoscodÎncă nu există evaluări
- Proiectarea Si Tehnologia Prelucrarii Lemnului Si A Produselor Finite Din LemnDocument57 paginiProiectarea Si Tehnologia Prelucrarii Lemnului Si A Produselor Finite Din Lemnpatrik_mocanu100% (2)
- Partea - 3 - 2 (360 - 439)Document83 paginiPartea - 3 - 2 (360 - 439)patrik_mocanuÎncă nu există evaluări
- Partea - 3 - 4 (540 - 600)Document62 paginiPartea - 3 - 4 (540 - 600)patrik_mocanuÎncă nu există evaluări
- Partea - 3 - 3 (440 - 539)Document103 paginiPartea - 3 - 3 (440 - 539)patrik_mocanuÎncă nu există evaluări
- Partea - 2 - 1 (177 - 297)Document124 paginiPartea - 2 - 1 (177 - 297)patrik_mocanuÎncă nu există evaluări
- Partea - 3 - 1 (298 - 359)Document66 paginiPartea - 3 - 1 (298 - 359)patrik_mocanuÎncă nu există evaluări
- Partea - 1 - 3 (114 - 176)Document69 paginiPartea - 1 - 3 (114 - 176)patrik_mocanuÎncă nu există evaluări
- Partea 1.1 (1-53) 141208Document57 paginiPartea 1.1 (1-53) 141208patrik_mocanuÎncă nu există evaluări
- Structura Macroscopică A LemnuluiDocument3 paginiStructura Macroscopică A Lemnuluipatrik_mocanu100% (4)
- Aspecte Teoretice Curbare Presare LemnDocument6 paginiAspecte Teoretice Curbare Presare Lemnpatrik_mocanuÎncă nu există evaluări
- Instrumente Pentru LemnarieDocument21 paginiInstrumente Pentru Lemnariepatrik_mocanuÎncă nu există evaluări