Documente Academic
Documente Profesional
Documente Cultură
Licenta 2014 (1000) .
Încărcat de
Voicu ClaudiuTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Licenta 2014 (1000) .
Încărcat de
Voicu ClaudiuDrepturi de autor:
Formate disponibile
1.
Studiul soluiilor similare i al tendinelor de dezvoltare
1.1. Soluii similare
SUV-urile au traciune 4x4 i dei unele dintre ele au i capaciti pentru terenuri
grele, SUV-urile nu sunt vehicule off-road.
SUV-urile i-au schimbat caracterul de-a lungul anilor, cele din prezent ncercnd
s ofere o conducere care seamn mai mult cu cea a berlinelor, i mai puin cu a
autoturismelor destinate tuturor tipurilor de teren. Au ctigat astfel caliti pentru drum,
dar nu mai sunt recomandate pentru ieiri pe drumuri neamenajate sau pentru tractat.
Unele SUV-uri sunt mai apropiate de mainile de strad prin mas,
comportament rutier i consum, i sunt clasificate ca SUV-uri ,crossover.
1. Range Rover Evoque
Range Rover Evoque este un vehicul compact sport (SUV), produs de
constructorul britanic Land Rover .Acesta a fost produs ncepnd cu luna iulie 2011, n
trei i cinci ui , att cu dou roi motoare cat i cu traciune integral .Evoque a fost
primit pozitiv de ctre presa de automobile pentru meninerea caracteristicilor, faciliti,
i capacitile off-road , tradiionale Range Rover ntr-un pachet mai mic.Land Rover a
vndut aproape 88.000 de uniti ale Evoque, n primul su an de productie.
Producia de Evoque a nceput la 4 iulie 2011, la Halewood , cu primele livrri
clienilor n luna septembrie.
Model de producie Evoque folosete caroserie aproape identic de la prototipul
LRX inclusiv lungimea cabinei i acoperi panoramic .
Masina a fost lansat sub forma a dou modele distincte: cinci ui Evoque i trei
ui Evoque Coupe. Modelul cu cinci ui este disponibil n trei niveluri de echipare -
"Pure", "Prestige" i "Dinamice". n timp ce "Evoque Coupe" este disponibil doar n dou
niveluri de echipare "Pure" i "dinamice" .
Programul european de evaluare a autovehiculelor noi (Euro NCAP) a acordat
Evoque cinci stele de rating de siguranta auto, ctignd urmtoarele ratinguri pentru
fiecare criteriu. Modelul testat a fost cu volanul pe dreapta, cu cinci ui, cu un motor
diesel de 2,2 nregistrat n anul 2011.
2. Dacia Duster
Dacia Duster este primul vehicul de teren al mrcii Dacia (parte a
GrupuluiRenault) i al aselea model al gamei. La puin timp de la evenimentul de
lansare la Salonul Auto de la Geneva, Dacia Duster a fost desemnat cel mai ieftin SUV
din lume de ctre World Records Academy. n prezent, modelul este fabricat la Uzina
de la Mioveni, att sub marca Dacia (pentru piaa romneasc, Europa, Turcia, Africa i
Magreb), ct i sub marca Renault (pentru pieele din Ucraina, Orientul Mijlociu
Iordania, Siria, Liban, Egipt i unele ri din Africa). ncepnd cu 2011, uzina Dacia
din Romnia a produs Renault Duster i pentru zona Golfului Persic. Tot atunci i alte
uzine Renault din lume au demarat producia acestui model: uzina Curitiba din Brazilia
va produce Renault Duster pentru Brazilia, Argentina, Mexic i Chile, n timp de uzina
Avtoframos din Moscova l va fabrica pentru piaa ruseasc.
Dacia Duster este disponibil att n versiune 42, ct i n versiune 44. Mai
multe elemente l recomand pentru toate categoriile de drumuri, n special n versiunea
cu traciunea integral:
- o gard la sol de o nlime considerabil (210 mm)
- consolele scurte (822 mm n fa, 820 mm n spate)
- unghiuri de trecere importante (unghi de atac de 30 i unghi de degajare de 36)
- o cutie de viteze n 6 trepte, cu o prim vitez scurt (5,79 km/h la 1000 tr./min).
Aceasta permite deplasarea cu o vitez foarte redus n teren accidentat i un
demaraj uor atunci cnd maina este ncrcat sau naintea unei rampe foarte
nclinate.
3. Audi Q5
Audi Q5 este un vehicul utilitar mijlocii (SUV), fabricate i comercializate de
ctre Audi din 2008, folosind Audi MLP platforma (Modular Longitudinal Platform), care
a debutat n 2007 Audi A5 Coup. Q5 este mai mic dect Audi Q7 i mai mare
dect Audi Q3 .
TDI SQ5 (2013 -)
Acesta este primul vehicul Audi S, modelul cu motor Diesel. Acesta a inclus
motor V6 twin turbo, transmisie Tiptronic cu 8 viteze, quattro permanent tractiune
integrala cu transfer de Torque Vectoring, suspensie sport coboara caroseria vehiculului
de 30 mm , jante 20-inch 5 spite cu anvelope 255/45 si jante opionale 21-inch.Vehiculul
a fost pus in vanzare in primul trimestru al anului 2013.
4. Mercedes-Benz GLK
Mercedes-Benz GLK ( nume de cod X204; Gelndewagen Luxus
Kompaktklasse) este un compact de lux SUV crossover , care a mers la vnzare din
toamna anului 2008, dup debutul public de la 2008 la Beijing Auto Show , alturi de
concurente Audi Q5 .
Vision GLK Freeside (2008)
Este un concept de vehicul care ncorporeaz un design original Mercedes-Benz
G-Class , cu caracteristici tipice de design contemporan din gama de autoturisme
Mercedes-Benz. Vehiculul concept include BlueTec de 2.2 litri cu patru cilindri, un motor
diesel cu puterea nominal de 170 CP (125 kW; 168 CP), 7G-Tronic cu apte trepte
transmisie automata, 4Matic cu tractiune integrala, conceptul de siguran PRE-SAFE
anticipat i sistemul inteligent de iluminare (ILS). Vehiculul a fost prezentat n 2008 la
Detroit Auto Show.
5.Volkswagen Tiguan
Volkswagen Tiguan este un compact crossover (SUV), fabricat de producatorul
german Volkswagen , folosind platforma PQ35 de Volkswagen Golf . Toate modelele
Tiguan sunt dotate cu scaune cu dou rnduri i motoare cu patru cilindri.
Tiguan a debutat ca un vehicul concept n noiembrie la Los Angeles
International Auto Show 2006 i n form de producie la Frankfurt Motor
Show 2007 . Fabricaia a nceput n iarna lui 2007 la Volkswagen filiala Auto
5000 din Wolfsburg i a continuat ulterior n regimul companiei contractuale standard, la
Wolfsburg i n Kaluga, Rusia.
Numele Tiguan , pronunat TEE-gwan , este o combinatie din germana
din cuvintele Tiger (" Tiger ") i Leguan (" iguana ") i a ctigat un concurs de numire
n evista auto Autobild ,din mai multe nume ce a inclus, de asemenea, Namib , Rockton,
Liger , Samun i Nanuk .
6. Nissan Qashqai
Nissan Qashqai , cunoscut sub numele de Dualis Nissan n Japonia i Australia,
este un compact CUV (Crossover Utility Vehicle) ( J-segment n Europa), produs de
constructorul auto japonez Nissan din 2007. Acesta a nlocuit modelele off-road Mistral
/ Terrano II i platforma sa P32L va fi, de asemenea, utilizata de ctre alte viitoare
autovehicule Nissan SUV-uri , Crossovere.
Nissan Qashqai numit dup Qashqai (pronunat Cash'ki) semi-nomazi trib care
triesc n sud-vest de muntele Iran .
Producie
Qashqai a fost construit la Nissan Motor Manufacturing UK (NMUK)
Sunderland , in decembrie 2006 fiind gata de productie.
Acesta este primul model care a fost conceput de Nissan Design Europe din
Londra , cu ajutorul ingineriei conduse de Nissan Technical Centre Europe
(NTCE). Acesta a fost la nivel global prezentat in cadrul salonului auto Paris Motor
Show 2006 .
.
7.Mitsubishi Outlander
Mitsubishi Outlander este un crossover produs de fabicile japoneze Mitsubishi
Motors . Acesta a fost iniial cunoscut sub numele de Mitsubishi Airtrek cnd a fost
introdus n Japonia n 2001, i sa bazat pe Mitsubishi ASX vehicul concept expus la
2001 North American International Auto Show .
La data de 17 octombrie 2005, Mitsubishi a lansat modelul Outlander a doua
generaie, cu acelai nume i n Japonia, nume cunoscut la nivel mondial.
Creterea cererii pentru noul Mitsubishi Lancer , iar efectele ulterioare asupra
capacitii de producie a companiei, s-au obligat s reevalueze Mitsubishi Outlander.
Modelul a avut parte de un facelift n anul 2008, dei grila a aparut n 2007 n Statele
Unite i Canada .
Mitsubishi Outlander a prezentat a treia generaie la Geneva Motor Show
2012. Versiunea de productie a Outlander a debutat n Rusia n iulie 2012, i a fost
introdus n alte piee europene , pana n septembrie 2012.
8.Toyota RAV4
Toyota RAV4 este un vehicul utilitar sport (SUV) produs de productorul de
automobile japonez Toyota . Acesta a fost primul crossover compact, face debutul n
Japonia i Europa n 1994 i n America de Nord n 1995. Vehiculul a fost conceput
pentru consumatorii care doresc un vehicul care are cele mai multe dintre beneficiile de
la SUV-uri , cum ar fi capacitatea mai mare pentru marf , vizibilitate mai mare i
opiunea de full-time tractiune integrala , mpreun cu manevrabilitatea i economia de
combustibil al unui autoturism compact . Dei nu toate RAV4 sunt integrale , RAV4 vine
de la vehicul activ de agrement cu 4-wheel drive , deoarece echipamentul menionat
este o opiune n anumite ri.Succesul avut de RAV4 a deschis calea pentru crossover
compact competitiv SUV-uri, cum ar fi Ford Escape si Subaru Forester .
n cele mai multe piee, RAV4 este singurul SUV compact sau crossover
disponibil de la Toyota. n alte piee, acesta este omologul Toyota FJ Cruiser . Din
moment ce modelul a treia generaie din 2006, Toyota a oferit versiuni att scurt i cu
ampatament lung ale RAV4.
9. Subaru Forester
Subaru Forester este un crossover fabricat inca din 1997 de ctre Fuji Heavy
Industries i vndute sub numele Subaru . Disponibil n Japonia din 1997, Forester
foloseste platforma Impreza . Acesta a fostintrodus n 1997 ca un
compactcrossover. Dup zece ani de producie, acesta a crescut la un mid-size SUV
crossover. Acesta a fost ncoronat de Motor Trend SUV-ul anului 2014.
Forester a fost introdus de la Tokyo Motor Show noiembrie 1995 ca conceptul
Streega, i puse la dispoziie de vanzare februarie 1997 in Japonia, iar pe piata din SUA
in 1998.
n 2004, Subaru a lansat o variant STI , Forester STI, pentru piaa japonez. A
pus acelasi motor ca pe modelul Subaru Impreza WRX STI, dar datorit reglajului diferit
a generat 320 CP (240 kW). Pentru modelul din anul 2006, Subaru a a lansat un
facelift, folosind faruri redesenate, capota, grila, bara de protectie fata si laterale.
Forester a treia generaie a folosit stilul Subaru dar a fost redesenata de
designerul Mamoru Ishii. Dimensiunile deriv din structura corpului de baz a vagonului
Impreza japonez .n special, Forester a treia generaie renun la geamurile laterale fara
rama folosite pe Subaru de la nceputul anilor 1970. Cea de a treia generaie cuprinde
masina pe baz de SUV, i las n urm proiectarea vagonului vechi, este mai mare n
aproape fiecare dimensiune i dispune de o linie de acoperi nclinat cu mai mult spaiu
de marf.
Marc i
model
C
i
l
i
n
d
r
e
e
[
c
m
c
]
P
u
t
e
r
e
[
C
P
]
l
a
n
p
[
r
o
t
/
m
i
n
]
M
o
m
e
n
t
m
o
t
o
r
[
N
m
]
l
a
n
M
[
r
o
t
/
m
i
n
]
D
i
m
e
n
s
i
u
n
e
a
a
n
v
e
l
o
p
e
l
o
r
A
m
p
a
t
a
m
e
n
t
[
m
m
]
E
c
a
r
t
a
m
a
n
e
t
f
a
t
a
[
m
m
]
E
c
a
r
t
a
m
a
n
e
t
s
p
a
t
e
[
m
m
]
L
u
n
g
i
m
e
[
m
m
]
L
a
t
i
m
e
[
m
m
]
I
n
a
l
t
i
m
e
[
m
m
]
M
a
s
a
p
r
o
p
r
i
e
[
k
g
]
A
c
c
e
l
e
r
a
t
i
e
0
-
1
0
0
k
m
/
h
[
s
]
V
i
t
e
z
a
m
a
x
i
m
a
[
k
m
/
h
]
C
o
n
s
u
m
m
e
d
i
u
[
l
/
1
0
0
k
m
]
Land
Rover
Evoque
2200 190/4000
420/175
0
235/5
5
R19
2
6
6
0
1
6
2
5
1625
4
3
6
5
1
8
9
5
1635 1635 10.0 200 5.7
Dacia
Duster
1461 110/4000
240/175
0
215/6
5 R
16
2
6
7
3
1
5
6
0
1567
4
3
1
5
1
8
2
2
1625 1205 11.8 171 5.7
Audi Q5 1968 170/4200
350/175
0
235/6
5 R
17
2
8
1
0
1
6
2
5
1620
4
6
3
0
1
8
9
8
1627 1635 10.9 192 5.3
Mercedes
GLK
2143
170/3200
400/200
0
235/6
0 R
17
2
7
5
5
1
6
3
0
1518
4
5
2
8
1
8
4
0
1680 1830 8.8 205 6.9
Volkswag
en
Tiguan
1968 170/4200
380/175
0
235/6
0 R
17
2
6
0
4
1
5
6
9
1571
4
4
2
6
1
8
0
9
1703 1678 8.5 202 5.8
Nissan
Qashqai
1955 150/4000
320/200
0
215/6
0 R
17
2
6
3
0
1
5
4
0
1545
4
3
3
0
1
7
8
3
1606 1395 9.5 194 6.4
Mitsubishi
Outlander
2179 150/3500
380/175
0
225/5
5 R
18
2
6
7
0
1
5
4
0
1540
4
6
5
5
1
8
0
0
1680 1565 9.8 200 5.4
Toyota
RAV 4
2231 177/3600
400/200
0
225/6
0R 17
2
5
6
0
1
5
6
0
1560
4
4
4
5
1
8
1
5
1685 1600 9.3 200 6.9
Subaru
Forester
1998 147/3600
350/180
0
215/5
5R 18
2
5
2
0
1
5
4
5
1485
4
4
8
5
1
8
3
5
1740 1540 10.3 186 5.9
Mrimea ampatamentului (fig. 1.1) este orientat spre valoarea aleas ca medie
cu mici abateri de la aceasta pentru fiecare model in parte.
Fig. 1.1 Ampatamentul autovehiculelor
Ecartamentul fa (fig. 1.2).
Fig. 1.2. Ecartament fa al automobilelor
2000
2100
2200
2300
2400
2500
2600
2700
2800
2900
A
[
m
m
]
Marc i model
Ampatementul autovehiculelor
1300
1350
1400
1450
1500
1550
1600
1650
E
f
[
m
m
]
Marc i model
Ecartament fa
Ecartamentul spate (fig.1.3)
Fig. 1.3. Ecartamentul spate al automobilelor
Lungimea (fig. 1.4) se prezint de semenea ca o dimensiune compact datorat
asemnrii soluiilor de organizare.
Fig. 1.4 Lungimea automobilelor
1300
1350
1400
1450
1500
1550
1600
1650
E
s
[
m
m
]
Marc i model
Ecartament spate
3500
3700
3900
4100
4300
4500
4700
4900
L
[
m
m
]
Marc i modelul
Lungimea
Limea (fig. 1.5).
Fig. 1.5 Limea automobilelor
nlimea (fig. 1.6) acestor autovehicule este apropiat ca valoare pentru toate
modelele menionate datorit clasei din care fac parte.
Fig. 1.6 nlimea autovehiculelor
1500
1550
1600
1650
1700
1750
1800
1850
1900
1950
l
[
m
m
]
Marc i model
Limea
1300
1350
1400
1450
1500
1550
1600
1650
1700
1750
1800
H
[
m
m
]
Marc i modelul
nlimea
Ca mrime de interes raportul
dintre puterea maxim dezvoltat de motorul
autovehiculului, (
) i masa autovehiculului
. Acest parametru are semnificaia
unui indice de motorizare. Valoarea medie a acestui parametru este de 0.0705
(kW/kg), mbuntirea performanei de motorizare facndu-se la creterea valorii
acestui parametru (figura1.7).
Fig.1.7. Raportul dintre puterea maxim dezvoltat de motorul autovehiculului i masa
autovehiculului
O altmrimefolositesteraportul
, dintre viteza maxim pe care o atinge
autovehiculul,
i masa autovehiculului,
d indicii asupra performanelor
dinamice de vitez maxim ale autoturismelor similare, artnd cu ce vitez este
propulsat fiecare kilogram din masa autoturismului. Fa de
valoareamedieaacestuiparametrupentruautoturismele din eantionulanalizat, de
0.08871, cretreaperformanei se exprimprincretereavaloriiparametrului (figura1.8).
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
P
m
a
x
/
m
a
[
k
W
/
k
g
]
Marc i model
Puterea raportat la masa autovehiculului
Fig.1.8 Performanele dinamice de vitez maxim ale autoturismelor similare
Un parametru de analiz comparativ ce exprim influiena nivelului de
motorizare asupra performanei dinamice de vitez maxim (
. Parametru
reprezint un criteriu de perfeciune al construciei de autovehicule prin exprimarea
vitezei imprimate de fiecare unitate de putere dezvoltat de motor. Fa de valoarea
medie a acestui parametru pentru autoturismele din eantionul analizat, de 1.29
creterea performanei se exprim prin creterea valorii parametrului (figura 1.9)
Fig.1.9 Raportul dintre viteza maxim i puterea maxim a auomobilului
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
v
m
a
x
/
m
a
[
k
m
/
h
k
g
]
Marc i model
Viteza raportat la masa autovehiculului
0
0.5
1
1.5
2
2.5
v
m
a
x
/
P
m
a
x
[
k
m
/
h
/
k
W
]
Marc i model
Viteza maxim raportat la puterea maxim a
automobilului
1.2. Etape de dezvoltare
Pentru alegerea sau determinarea parametrilor iniiali care intervin n calcul este
necesar, pe lng studiul soluiilor constructive asemntoare, deja existente n lume,
s se fac i o cercetare a tendinelor de dezvoltare specifice categoriei
de autovehicule studiate.
Direciile de dezvoltare au n vedere s sublinieze orientarea general n ceea ce
privete modul de organizare a familiei de autovehicule studiate, modul de dispunere a
motorului, organizarea i tipul transmisiei, construcia sistemelor i a instalaiilor
auxiliare, amenajarea interioar, etc.
Etape de dezvoltare a autoturismelor
Autoturismele, definite ca fiind autovehicule destinate transportului de persoane,
avnd o capacitate de cel mult opt locuri, au stat i stau n permanen n atenia
marelui public, datorit implicrii lor tot mai intense n viaa cotidian.
Construcia autoturismelor, a elementelor componente, se perfecioneaz
permanent, urmrindu-se mbuntirea performanelor de dinamicitate sau frnare, a
performanelor de economicitate, de stabilitate i de confort, de securitate activ i
pasiv, etc. Domeniile de aciune s-au extins asupra tuturor prilor componente ale
autoturismului i se aplic cele mai noi i eficiente soluii de mbuntire sau schimbare
a acestora.
Astfel, motoarele autoturismelor au beneficiat de o atenie deosebit, eforturile
de sporire a performanelor lor fiind ndreptate pe multe direcii: creterea
performantelor funcionale i constructive prin gestionarea electronic a regimurilor de
funcionare, reducerea consumului de combustibil, mrirea puterii litrice, reducerea
costurilor de fabricaie, reducerea emisiilor nocive din gazele de evacuare, realizarea de
motoare ct mai fiabile, ct mai uoare i ct mai compacte. Se remarc tendinele de
aplicare tot mai frecvent a injeciei de benzin cu comand electronic, mono sau
multipunct, n detrimentul motoarelor cu carburator, ca i dezvoltarea motoarelor cu
aprindere prin comprimare, datorit consumului specific de combustibil mai redus, n
comparaie cu motoarele cu aprindere prin scnteie. Folosirea motorului Diesel pe
autoturisme a devenit realist cnd turaiile maxime ale acestuia au depit 4200
4400 rot/min, realizndu-se exemplare ce dezvolt 5000 rot/min. Perfecionarea acestor
motoare privind reducerea zgomotului, a polurii, a pornirii uoare pe timp friguros, a
fcut progrese remarcabile si le-a asigurat creterea ponderii proprii n detrimentul
motoarelor cu aprindere prin scnteie.
O alta preocupare constant este aceea a crerii unor familii de motoare,
pornindu-se de la un monocilindru sau de la un motor de baz, de la care, n funcie de
necesit i, se realizeaz o serie de motoare cu puteri i capaciti diferite, avnd unele
pri componente identice, procedeul favoriznd folosirea tipizrii n tehnologia de
fabricaie i exploatare a autoturismelor.
Folosirea supraalimentrii prin diferite procedee este tot mai des ntlnit la
motoarele de autoturisme, aceasta asigurnd creterea puterii i momentului motor
maxim, cu scderea turaiilor corespunztoare i a consumului de combustibil.
Injecia de benzin este mult cercetat, perfecionat i aplicat la producia de
serie deoarece, completat cu comand i control electronic, este n msur s asigure
performane superioare n ceea ce privete reducerea consumului de combustibil,
reducerea emisiilor poluante i ridicarea gradului de securitate aconducerii
autoturismului.
Aprinderea cu comand electronic este o variant des ntlnit cu influen
benefic asupra consumului de combustibil, prin declanarea avansului la aprindere
dup legea optim.
Sistemele de injecie electronica Diesel ca i sistemele de injecie cu benzin
evolueaz permanent, fiind tot mai rspndite, datorit controlului electronic al
principalilor parametrii (presiune, debit, cantitatea de combustibil injectat, etc.) care
conduce la creterea performanelor funcionale i economice ale motoarelor
respective.
Reducerea dimensiunilor de gabarit i a consumului de metal constituie i in
continuare o surs de cercetare permanent, ea fiind realizat prin forarea motoarelor,
cnd se dezvolt puteri tot mai ridicate pe unitatea de cilindree si realizarea cilindreei
unitare cu o mas ct mai mic.
Numeroase sunt i preocuprile legate de ameliorarea formei camerei de ardere,
a tubulaturii de admisie i evacuare, a geometriei de dispunere i acionare a supapelor,
a numrului, mrimii i locului lor de amplasare, a funcionrii cu dispozitive de
alimentare stratificat cu combustibil, a nlocuiri materialelor metalice cu materiale
ceramice, a realizrii motoarelor adiabatice sau cu raport de comprimare variabil, etc.
Ultimele realizri n domeniul alimentrii, aprinderii i arderii, care permit reglaje
mbuntite de avans i dozaj, au condus la creterea performanelor motoarelor, la
reducerea consumului de combustibil i a agenilor poluani. Se fac n prezent eforturi
considerabile pentru limitarea emisiei de gaze nocive prin folosirea unor dispozitive de
purificare a gazelor de evacuare sau a unor catalizatori purificatori ai acestor gaze.
Transmisia autoturismelor a constituit i constituie obiectul unor continue cercetri
urmrindu-se prin soluiile constructive propuse, o ct mai bun corelare ntre momentul
motor activ i cel rezistent, reducerea consumului de combustibil, sporirea siguranei i
confortului de conducere. Se constat c pe lng transmisiile mecanice clasice se
folosesc i alte categorii de transmisii, cum sunt cele automate, cele cu variaie continu
a raportului de transmitere, sau, mai nou, cele electrice.
La transmisiile mecanice ale autoturismelor sunt tot mai rspndite cutiile de
viteze cu cinci sau ase trepte de mers nainte, ultima treapt avnd, de obicei, raportul
de transmitere subunitar, fiind treapta economic. Aceasta, atunci cnd este cuplat,
conduce la reducerea consumului de combustibil, prin micorarea turaiei motorului i
aducerea acesteia n zona turaiei economice. Apariia cutiilor de viteze cu ase trepte
de mers nainte asigur autoturismelor performane de dinamicitate i economicitate tot
mai ridicate. Cutiile de viteze secveniale constituie apariii recente, care asigur
optimizri ale procesului de cuplare a treptelor de viteze, ale construciei i funcionrii
acestora. Ele conduc la creterea confortului de conducere i la mbuntirea
siguranei n deplasare.
Transmisia automat face progrese mai lente, datorit costului ridicat al
fabricaiei i al consumului de combustibil sporit, n comparaie cu cel al transmisie
clasice. Totui se remarc introducerea microprocesoarelor de bord, care gestioneaz
funcionarea transmisiei automate, alturi de funcionarea motorului, a frnelor, a
suspensiei, a direciei, etc. Performanele atinse de ultimele transmisii automate cu
comanda electronica, avnd 5 sau 6 trepte de mers nainte, tind s micoreze i chiar
s elimine dezavantajele pe care le au aceste transmisii n comparaie cu transmisiile
mecanice, clasice, neautomate, n ceea ce privete dinamicitatea i consumul de
combustibil. Se remarc apariia unor regimuri de deplasare economice sau sportive,
care asigur autoturismelor performane de economicitate, respectiv de dinamicitate,
similare cu cele asigurate de transmisiile clasice.
Transmisia cu variaie continu a raportului de transmitere - CVT - (Continously
Variable Transmission) se ntlneste tot mai frecvent la autoturismele de clasa mic i
mijlocie, datorit asigurrii unor rapoarte de transmitere care se modific i se
adapteaz continuu, automat, la modificarea rezistenelor la naintare ale automobilului.
O alt preocupare tot mai rspndit, n special la autoturismele sport, la unele
autoturisme de ora i chiar la unele miniturisme, este aceea a traciunii integrale, cu
folosirea unor difereniale interaxiale blocabile sau, mai frecvent, autoblocabile, tendin
existent deja n cazul autoturismelor tot-teren, avnd ca efect creterea confortului de
conducere i a siguranei n exploatare, mbuntirea capacitii de trecere i a
stabilitii. Repartizarea optim a momentului motor ntre punile motoare fa i spate
trebuie s se fac n funcie de aderena existent la roile fiecrei puni motoare.
Amplasarea grupului motopropulsor, longitudinal sau transversal, fa sau spate,
se face avnd n vedere avantajele i dezavantajele pe care fiecare dintre aceste
variante de organizare le are asupra confortului i spaiului destinat pasagerilor, asupra
complexitii construciei transmisiei, a modului de organizare a celorlalte sisteme ale
automobilului.
Pentru mbuntirea dinamicii n regim de traciune, autoturismele au fost dotate
cu sisteme de control al traciunii (ASR), care ndeplinesc n general urmtoarele
funciuni: corijarea aciunilor de comand ale conductorului auto n raport cu regimul
de deplasare al automobilului i aderena roilor cu calea de rulare, asigurarea stabilitii
i maniabilitii, mbuntirea traciunii la demaraje i n condiii dificile de drum,
informarea conductorului auto asupra apariiei situaiilor deosebite ce duc la patinarea
uneia sau mai multor roi.
Suspensia autoturismelor a fcut obiectul unor studii aprofundate privind
condiionarea reciproc dintre pneu, suspensie i calea de rulare. Acestea au permis s
se obin, prin simularea pe calculator a fenomenelor complexe care au loc n timpul
deplasrii autoturismului, o suspensie corespunztoare pentru fiecare model cercetat.
Echiparea autoturismelor cu suspensii independente pe toate roile, prin folosirea
amortizoarelor hidraulice i hidropneumatice i a corectoarelor de ruliu a contribuit la
mrirea confortului, a siguranei n deplasare i a stabilitii.
Suspensia mecanica clasic este supus unor modificri permanente,
urmrindu-se perfecionarea cinematicii sale, a legturii ntre suspensie i structura
de rezisten a automobilului, a atenurii ocurilor i vibraiilor primite de la roi, a
cinematicii roilor directoare, a confortului pasagerilor.
Suspensia hidropneumatic, caracteristic autoturismelor fabricate de concernul
Citron, asigur un confort optim pasagerilor, n sensul pstrrii unei poziii constante a
caroseriei, prin corelarea micrilor tuturor roilor automobilului, indiferent de calitatea
cii de rulare.
Sistemul de frnare cunoate, de asemenea, preocupri intense de mbuntire,
generalizare avnd sistemul de frnare cu dublu circuit. Autoturismele sunt echipate fie
numai cu frne disc, fie cu frne mixte, adic cu frne cu tambur la roile din spate i cu
frne disc la roile din fa. Cunosc generalizare frnele autoreglabile, care
compenseaz automat uzura normal a garniturilor de friciune i limitatoarele de
frnare, care distribuie forele de frnare la punile automobilului n funcie de
ncrcarea dinamic a acestora.
Sistemele de frnare cu control electronic, aa numitele ABS (Anty Blocking
System), care mpiedic blocarea roilor n cazul frnrilor intensive i care permit
pstrarea controlului automobilului n orice situaie, cunosc o larg utilizare, la aproape
toate categoriile de automobile. De asemenea se generalizeaz indicatoarele de uzur
a garniturilor de frn, frnele autoreglabile, servomecanismele de acionare a frnelor,
comandate de instalaii specifice.
Sistemul de direcie se realizeaz n soluii constructive legate de tipul suspensiei
folosite, n scopul asigurrii unei cinematici corecte roilor de direcie. Ca tendine
actuale se remarc creterea comoditii de conducere i siguranei n deplasare prin
extinderea folosirii servodireciilor i la clase mai mici de autoturisme, reducerea
efectului reaciilor inverse, de la roat spre volan, asigurarea creterii siguranei
conductorului sau pasagerilor n deplasare prin folosirea air-bag-urilor (frontale sau
laterale) i prin folosirea unor volane i axe volan rabatabile sau telescopice.
Caroseria este aproape n totalitate autoportant. Cercetrile i ncercrile
efectuate au condus la realizarea unor caroserii avnd coeficieni aerodinamici tot
mai cobori. Datorit folosirii oelurilor de nalt rezisten, cu o limit de elasticitate
ridicat, rigiditatea caroseriei, factor important n ameliorarea inutei de drum, a fost mult
mbuntit. S-au luat msuri de reducere a greutii proprii prin nlocuirea pieselor din
metal cu piese din materiale plastice sau din materiale compozite. Se mbuntete
permanent securitatea activ i pasiv pe care automobilul o poate asigura pietonilor,
respectiv pasagerilor. Insonorizarea caroseriilor a permis reducerea zgomotului. Se
folosesc caroserii monovolum, cu dou sau trei volume, n funcie de modelul
autoturismului.
Pentru pneurile de autoturisme, n vederea micorrii energiei absorbite n timpul
rulajului, a amortizrii ocurilor, ale creterii siguranei i duratei n exploatare, se
folosesc noi reete la fabricarea anvelopelor i camerelor de aer, se utilizeaz diferite
profiluri pentru banda de rulare. Se ncearc folosirea unor pneuri fr aer n interior
(pneuri Denevo, folosite de firma Dunlop) sau a unor pneuri fr camer de aer, care au
n interior o soluie special (polygel) care vulcanizeaz instantaneu o perforare a
pneului (pneuri PunctureGuard), fara s afecteze performantele pneului i, implicit,
sigurana n deplasare i confortul n conducere.
Aparatura de bord folosete tot mai mult circuite integrate cu afiaj numeric,
folosind tehnica fluorescenei n vid sau aceea cu cristale lichide, care prezint un grad
ridicat de fiabilitate. Aparatura electronic asistat de calculator este de un real folos.
Ea supravegheaz i informeaz permanent conductorul despre diferii parametri
necesari conducerii n siguran, informeaz asupra funcionrii organelor n micare,
urmrete atingerea unor limite maxime de uzur, indic consumul instantaneu i
rezerva de combustibil, etc.
La toate autoturismele moderne este asigurat controlul electronic al motorului,
al sistemului de frnare cu antiblocare, al comenzilor cutiei de viteze, al suspensiei al
radarului anticoliziune i al altor sisteme. n preocuprile specialitilor, un loc central l
ocup i dispozitivele de dirijare ale autovehiculelor, aparatura de navigaie, aparatura
de urmrire, afiare a datelor (pe parbriz sau holografic).
n prezent toate marile firme constructoare de autoturisme dezvolt programe de
cercetare privind creterea securitii n deplasare, protecia mediului nconjurtor,
reducerea consumului de combustibil, dezvoltarea tehnologiilor de fabricare a
autoturismelor i creterea calitii acestora, micorarea costurilor de producie i
respectarea termenelor stabilite pentru toate etapele de concepie, fabricare i vnzare
produs.
2. Alegerea parametrilor principali ai automobilului
2.1. Soluia de organizare general i amenajare interioar
2.1.1. Modul de dispunere a echipamentului de traciune
Motorul -maina de propulsie- i transmisia formeaz grupul (echipamentul)
moto-propulsor. Organizarea i dispunerea grupului moto-propulsor constituie
caracteristici de baz n aprecierea calitilor de utilizare ale automobilelor.Grupul moto-
propulsor poate fi repartizat de-a lungul axei longitudinale a automobilului sau poate fi
grupat ntr-un singur loc. In funcie de poziia relativ dintre axa longitudinal a
automobilului i axa de rotaie a arborelui cotit, motorul poate fi dispus longitudinal sau
transversal. Pentru autoturisme, prevzute cu dou punti, organizarea traciunii se
poate realiza dup solutiile 4x2 sau 4x4, prima cifr indicnd numrul roilor iar cea de-a
doua pe cel al roilor motoare. Pentru organizarea traciunii de tipul 4x4 puntea motoare
poate fi dispus n fa si n spate.
Solutia de organizare generala a automobilului proiectat
Automobilul este un vehicul tot teren, autopropulsat, cu caroserie i roi, care se poate
deplasa pe drumuri sau pe ci neamenajate. El este un ansamblu complex, constituit
dint-un numr apreciabil de componente, care se intercondiioneaz constructiv i
funcional. Acestea pot fi grupate astfel:
-motorul cu sistemele sale;
-transmisia (ambreiajul, cutia de viteze, cutia de distribuie sau reductorul
distribuitor, transmisia longitudinala, puntea sau punile motoare); n funcie de soluia
de organizare a traciunii automobilului unele din componentele transmisiei pot lipsi.
-sistemele de conducere, care cuprind sistemul de direcie i sistemul de frnare;
-sistemul de susinere si propulsie, format din suspensie, asiu sau cadru, puni,
sistemul de rulare;
-caroseria;
-echipamentul electric si electronic;
-instalaiile i dispozitivele auxiliare.
Motorul, alturi de transmisie, formeaz grupul motopropulsor al automobilului i
asigur punerea sa n micare. n motor energia chimic a combustibilului utilizat se
transform n energie mecanic transmis roilor motoare, prin intermediul transmisiei.
Motorul este format din mecanismul motor (mecanismul biel-manivel i mecanismul
de distribuie), din sistemele de alimentare, ungere i rcire, din instalaia de pornire i
instalaia de aprindere (la motoarele cu aprindere prin scnteie).
Automobilele au diferite surse energetice, majoritatea fiind motoare cu ardere
intern, cu aprindere prin scnteie sau prin comprimare - m.a.s. sau m.a.c..
Transmisia are rolul s asigure transmiterea fluxului de putere de la motor la
roile motoare, asigurnd propulsarea automobilului. Calitile de traciune ale
automobilului sunt influenate de caracteristicile transmisiei, care poate fi mecanic,
hidromecanic, hidrostatic sau electric. Elementele componente ale transmisiei sunt
prezentate semnificaia notaiilor fiind urmtoarea: ambreiajul; cutia de viteze; cutia de
distribuie sau reductorul-distribuitor; transmisia longitudinal; reductorul central sau
transmisia principal, diferenialul i transmisia la roile motoare.
Sistemul de direcie i sistemul de frnare constituie sistemele cu care
conductorul automobilului asigur conducerea n siguran, n regimul de deplasare
dorit i pe traiectoria comandat. Sistemul de frnare asigur i staionarea
automobilului n siguran timp nelimitat.
Sistemul de susinere i propulsie, format din suspensie (arcuri, elemente de
ghidare, amortizoare), cadru (dac este ansamblu distinct), puni i roi, asigur
susinerea elastic a automobilului pe calea de rulare, constituie baza de susinere a
elementelor sale componente i transform micarea de rotaie din transmisie n
micare de translaie a automobilului.
Caroseria constituie structura de rezisten i de protecie a pasagerilor sau a
mrfurilor transportate i, de cele mai multe ori, ea d nota de personalitate i de
identificare a unei mrci de automobil. Se cunosc diferite tipuri de caroserii, cu propriile
lor caracteristici, fiind uor de identificat familia din care fac parte. La automobilele la
care cadrul lipsete, caroseria preia i rolul acestuia, devenind caroserie portant.
Echipamentul electric i electronic ocupa o pondere n continu cretere n
construcia automobilului, asigurnd creterea confortului de conducere i mrirea
siguranei n deplasare. Sistemele electronice asigur optimizarea proceselor de
frnare, de conducere cu efort fizic minim, de stabilitate i maniabilitate pentru
automobil, corectnd sau mpiedicnd eventualele erori de conducere. Aceste sisteme,
cunoscute sub denumiri deja intrate n vocabularul de specialitate - ABS, ASR, ASC,
EBS, etc- constituie, n prezent, aproximativ 30% din valoarea de cumprare a
autoturismelor moderne. Ele au debutat cu controlul electronic al funciilor motorului
(aprindere, injecie), au cumulat rolul monitorizrii grupului motopropulsor i culmineaz,
n prezent, cu funcii ce in de securitate (air-bag) i ghidarea electronic n traficul
rutier.
Instalaiile i dispozitivele auxiliare se ntlnesc numai la automobilele cu
destinaie special - autoateliere, autosanitare, automturtori, automacarale,
autocisterne, autobasculante, automobile pentru pompieri, etc.
Modul de dispunere a echipamentului de tractiune
Transmisia automobilelor este organizat n diverse variante constructive, care
depind de destinaia automobilului, de locul i modul de dispunere a motorului i a
punilor motoare, de numrul acestora, de dimensiunile geometrice ale caroseriei i ale
automobilului.
Compunerea i dispunerea prilor componente ale transmisiei este rezultatul
unui proces complex de analiz a calitilor de traciune i a capacitii de trecere ale
automobilului, care s corespund destinaie sale. Modul de organizare a transmisiei
influeneaz caracteristicile de deplasare ale automobilului i condiioneaz posibilitile
de amplasare a celorlalte componete ale acestuia.
-soluia clasic, presupune dispunerea motorului n partea din faa automobilului i
puntea motoare n spate, situaie n care componentele transmisiei sunt distribuite de-a
lungul axei longitudinale a automobilului. Transmisia automobilelor cu punte spate
motoare i motor amplasat longitudinal n fa reprezint de foarte mult timp schema
ideal de organizare.
Ambreiajul i cutia de viteze sunt amplasate longitudinal, ntre motor i puntea
motoare putnd forma un ansamblu compact fie cu motorul fie cu puntea motoare.
Avantajele principale ale soluiei clasice sunt: bun repartiie a sarcini pe puni;
ncrcare favorabil a punii spate la demaraj i urcarea pantelor; rcire
mbuntit a motorului; uzur relativ identic a roilor punii fa (directoare) i a celor
din spate (motoare); comenzi simple i precise ale motorului i cutiei de viteze.
Conferind automobilului caliti constructive de supravirare, care reprezint un
caracter de mers instabil pe traiectorie, conducerea automobilului necesit fie
ndemnare deosebit fie soluii constructive suplimentare pentru corectarea
caracterului de supravirare. Soluia este limitat la automobile echipate cu puteri medii
sau mari i prezint avantajul ncrcrii dinamice la demarare a punii spate, cu
consecine favorabile asupra capacitii dinamice de trecere.
M A CV
V
a
PM
TL
Fig.2.1. Schema transmisiei organizat n soluia clasic
2.1.2 Dimensiunile principale
Dimensiunile adoptate provin din media solutiilor similare.
Lungime:4510 mm
Lime:1833 mm
nlime:1665 mm
Ampatament: 2 680 mm
Ecartament fa:1575mm
Ecartament spate:1560 mm
Pneuri: 235/60 R17
2.1.3. Amenajarea interioar
n cazul autoturismelor, cabina pentru pasageri este amplasat la mijloc
totdeauna, pentru ca acetia s fie ct mai bine protejai contra accidentrii.Caroseria
de securitate se obine prin urmtoarele msuri: rigidizarea construciei fr reducerea
vizibilitii, folosirea unei tapiserii de grosime mare pe tavan i pereii laterali, montarea
unor mnere pentru ui i macarale pentru geamuri fr proeminene, montarea unor
air-bag-uri frontale sau laterale, tapisarea butucului volanului, a bordului i a a
parasolalelor, folosirea coloanei de direcie telescopice i a unui volan uor deformabil
n direcie axial, montarea parbrizului astfel nct la deformarea caroseriei geamul s
sar n afar.
Dimensiunile principale ale postului de conducere i limitele de amplasare a
organelor de comand manual la autoturisme i vehicule utilitare se aleg conform
STAS 6689/1-81, astfel nct acestea s fie n permanen n raza de aciune
determinat de dimensiunile antropometrice ale conductorului.
n fig. 2.2. sunt prezentate, dup recomandrile STAS 12613-88, dimensiunile
postului de conducere, iar n tabelul 1.5 sunt prezentate limitele de modificare a acestor
mrimi.
Punctul R, definete punctul de referin al locului de aezare (al scaunului) i
reprezint centrul articulaiei corpului i coapsei unui manechin bidimensional, conform
STAS R 10666/3-76, sau tridimensional, conform STAS R 10666/2-76 i regulamentului
nr.35 ECE-ONU. Punctul R este un punct stabilit constructiv de ctre productor i
indicat pentru fiecare scaun determinat n raport cu sistemul de referin tridimensional .
n ceea ce privete postul de conducere, pentru determinarea corectitudinii
dispunerii scaunului fa de comenzi, se aplic metoda recomandat de STAS 12613-
88 i norma ISO 3958-77, care stabilete o nfurtoare a distanelor maxime de
aciune ale unei mini a conductorului aezat pe scaun, cu cealalt mn pe volan i
piciorul stng pe pedala de acceleraie, avnd montat o centur de siguran cu trei
puncte de sprijin.
Comenzile luminilor de drum, avertizorului luminos, semnalizrii schimbrii
direciei, luminilor de poziie spate i laterale, avertizrii sonore, tergtorului i
spltorului de parbriz trebuie s fie amplasate n zona de acionare a minii
conductorului autovehiculului.
Fig.2.2. Dimensiunile postului de conducere
Tabelul 2.1. Limitele de modificare ale dimensiunilor postului de conducere
Nr
crt
Dimensiunea
Limita de
modificare
Valoare
adoptat
1.
Unghiul de nclinare spre napoi, [
O
] 9..33 30
2.
Distana vertical de la punctul R la
punctul clciului, H
Z
[mm]
130..320 270
3. Cursa orizontal a punctului R [mm] min. 1300 1300
4. Diametrul volanului, D [mm] 330..600 400
5. Unghiul de nclinare a volanului, [
O
] 10..60 40-50
6.
Distana orizontal ntre centrul volanului
i punctul clciului, W
X
[mm]
152..660 400
7.
Distana vertical ntre centrul volanului
i punctul clciului, W
Z
[mm]
530..838 700
Amenajarea interioar a autoturismelor i dimensiunile interioare ale acestora
sunt prezentate n STAS 6926/4:1995
Modul de amplasare a comenzilor manuale a indicatoarelor de funcionare i a
semnalizatoarelor de control este recomandat de SR ISO 4040:1995.
Greutatea autovehicululi,repartizarea acesteia pe punti,determinarea
coordonatelor centrului de greutate al autovehiculului proiectat
-Masa autovehiculului
Masa autovehiculului (m
a
) face parte din parametrii generali ai acestuia i
reprezint suma dintre masa util (m
u
) i masa proprie (m
0
).
-Masa utila
Reprezint o caracteristic constructiv esenial a autovehiculului, prin ea
caracterizndu-se posibilitile de utilizare a acestuia. Masa util este determinat de
capacitatea de ncrcare a autovehiculului, prevzut prin tema de proiectare sau
adoptat funcie de tipul autovehiculului, n concordan cu capacitatea de ncrcare a
tipurilor similare.
Masa proprie
Este o mrime ce caracterizeaz construcia autovehiculului i este determinat de
suma maselor tuturor sistemelor i subsistemelor componente, cnd autovehiculul se
afl n stare de utilizare.
0
m m m
u a
+ =
unde:
b u
m N m + = 75
b
m =50 kg
N=numar de locuri pasageri
kg m
u
425 50 5 75 = + =
kg ma 1965 425 1540 = + =
-Centru de masa si coordonatele centrului de greutate
Fata de masele determinate mai sus ,se determina greutatea automobilului
(G
a
), greutatea utila (G
u
) si greutatea proprie (G
o
)
G
a
=10m
a
[N] =19650 N
G
u
=10m
u
[N] = 4250 N
G
o
=10m
o
[N] = 15400 N
Masa autovehiculului se consider aplicat n centrul de mas (centrul de
greutate), situat n planul vertical ce trece prin axa longitudinal de simetrie a
autovehiculului. Poziia centrului de mas se apreciaz prin coordonatele longitudinale
a i b i nlimea h
g
.
Fig.2.3. Coordonatele centrului de mas
Tipul autovehiculului (tabel 2.2.)
Parametru Starea Autoturism
L
a
Gol 0,450,54
ncrcat 0,490,55
L
h
g
Gol 0,160,26
ncrcat 0,1650,26
Se adopt: 55 , 0 =
L
a
mm a a 1474 2680 55 , 0 = =
25 , 0 =
L
h
g
mm h h
g g
670 2680 25 , 0 = =
mm b a L b 1206 1474 2680 = = =
Masa autovehiculului se transmite cii prin intermediul punilor.
Masele ce revin celor 2 punilor sunt:
kg m
L
b
m
a
693 2390 45 . 0
1
= = = ;
kg m
L
a
m
a
847 2390 55 . 0
2
= = = ;
Greutile ce revin punilor vor fi :
N G
L
b
G
a
8843 19650 45 . 0
1
= = = ;
N G
L
a
G
a
10808 19650 55 . 0
2
= = = .
Funcie de masa repatizat punilor se poate determina masa ce revine unui pneu.
Astfel:
- pentru pneurile punii din fa:
kg
m
m
p
347
2
693
2
1
1
= = = ,
- pentru pneurile punii spate:
kg
n
m
m
p
424
2
847
2
2
= = = .
unde n numrul de pneuri ale punii spate.
Greutile ce revin pneurilor autovehiculului:
- N G g m G
p p p
3470 10 347
1 1 1
= = =
- N G g m G
p p p
4240 10 24 4
2 2 2
= = =
Valorile
1
p
m i
2
p
m astfel determinate condiioneaz mpreun cu viteza maxim a
autovehiculului tipul pneurilor folosite i caracteristicile de utilizare.
2.4. Alegerea pneurilor
Pneul reprezint partea elastic a roii i este format din anvelop i camer de aer.
Alegerea tipului de pneu ce urmeaz s echipeze autovehiculul proiectat are n
vedere tipul, destinaia i condiiile de exploatare ale autocamionului.
Alegerea pneului se face dup urmtoarea metodologie:
- se detremin greutatea ce revine roilor din spate i din fa;
- se aleg pneurile ce satisfac condiia de vitez maxim;
- funcie de dimensiunile pneurilor utilizate la tipurile similare, se orienteaz
asupra dimensiunilor roii;
- se alege tipul pneului;
- se alege presiunea de utilizare pentru satisfacerea condiiilor de greuate
pe roat;
La alegerea pneului, se au n vedere urmtoarele aspecte:
- pentru asigurarea unei bune confortabiliti, puntea fa trebuie s fie
caracterizat de o elasticitate mai mare dect puntea spate. La obinerea
elasticitii sporite a punii fa contribuie i utilizarea presiunii interioare a
aerului din pneu, mai mic n fa dect n spate;
- prin reducerea presiunii aerului din pneu la roile fa, se reduce i
rigiditatea lateral a pneului, astfel c prin sporirea deviaiilor laterale se
favorizeaz imprimarea unui caracter constructiv de subvirare caracterizat
de tendina de autostabilizare pe traiectorie rectilinie.
Pentru calculele de dinamica autovehiculului este necesar cunoaterea razei de
rulare, care se apreciaz analitic funcie de raza nominal a roii i un coeficient de
deformare:
0 r
r r =
,
unde:
r
0
raza roii libere determinat dup diametrul exterior
- coeficient de deformare, care depinde de presiunea interioar a aerului din
pneu i are valorile:
- pentru pneurile utilizate la presiuni mai mici de 600 kPa (6 bari);
935 , 0 93 , 0 =
- pentru pneurile utilizate la presiuni mai mari de 600 kPa (6 bari);
95 , 0 945 , 0 =
D diametrul exterior (nominal) al anvelopei (fig.3).
d diametrul interior al anvelopei;
H nlimea profilului;
B limea profilului (balonajul).
H 2 d D + =
.
-raza nominal are expresia:
2
D
r
n
=
Se adopt pneurile cu caracteristicile urmtoare:
235/60 R17 102 V
Pentru calculele de dinamica autovehiculului este necesar cunoaterea razei de
rulare:
mm r r
mm
D
r r
mm D
mm H
H
B
H
r
n
332 357 93 . 0
357
2
8 . 713 141 2 4 . 25 17
141
42 . 0
60
42 . 0
235
100 100 60
0
0
= = =
= = =
= + =
= = = = =
Dimensiunile principale ale anvelopelor
3. DEFINIREA CONDIIILOR DE AUTOPROPULSARE
3.1. Rezistena la rulare
3.1.1. Generarea rezistenei la rulare
Rezistena la rulare, R
r
, este o fora cu aciune permanent datorat exclusiv
rostogolirii roilor pe cale, i este de sens opus sensului de deplasare al automobilului.
Cauzele fizice ale rezistenei la rulare sunt:
deformarea cu histerezis a pneului;
frecrile superficiale dintre pneu i cale;
frecrile din lagrele butucului roii;
deformarea cii de rulare;
percuia dintre elementele benzii de rulare i microneregularitile cii de rulare;
efectul de ventuzare produs de profile cu contur nchis de pe banda de rulare pe
suprafaa neted a cii de rulare.
ntre cauzele amintite mai sus, n cazul autoturismelor care se deplaseaz pe ci
rigide, netede, aderente ponderea important o are deformarea cu histerezis a
pneului.
3.1.2. Factori de influen asupra rezistenei la rulare
Principalii factori care influeneaz rezistena la rulare sunt:
- viteza de deplasare a autovehiculului;
- caracteristicile constructive ale pneului;
- presiunea interioar a aerului din pneu;
- sarcina normal pe pneu;
- tipul i starea cii de rulare;
- forele i momentele aplicate roilor.
Evaluarea prin experiment a unuia dintre factori nu este posibil deoarece toi
parametrii de mai sus definesc pneul n timpul rulrii lui.
3.1.3. Calculul rezistenei la rulare
Pentru calculele se poate adopta valoarea coeficientului rezistenei la rulare n
funcie de calitatea drumului pe care se deplaseaz autovehiculul, dup recomandrile
din tabelul 3.1.
Tabelul 3.1. Valori medii ale coeficientului rezistenei la rulare
Natura cii Starea cii
Coeficientul de rezisten
la rulare
Asfalt sau beton
bun 0,015-0,018
satisfctoar
e
0,018-0,022
osea pietruit bun 0,020-0,025
osea pavat
stare bun 0,025-0,030
cu hrtoape 0,035-0,050
Drum de pmnt
uscat
bttorit
0,025-0,035
dup ploaie 0,050-0,150
desfundat 0,100-0,250
Drum cu gheat sau
ghea
0,015-0,030
Drum cu zpad
afnata 0,07-0,100
bttorit 0,03-0,05
Pentru calculul rezistentei la rulare se utilizeaza relatia:
o cos =
a r
G f R [N]
Avand in vedere ca autoturismul de proiectat ,unghiul maxim o pe care il vom lua in
calcul va fi de o=32
o
n concordan cu valorile coeficientului rezistenei la rulare din tabelul 3.1 i cu
valorile calculate in tabelul 3.2. adopt valoarea: 022 , 0 = f .
3.2. Rezistena aerului
3.2.1. Noiuni de aerodinamica autovehiculului
Aerodinamica autovehiculelor se ocup de fenomenele care se produc la
interaciunea dintre autovehicul i aerul nconjurtor i folosete principiile generale ale
aerodinamicii teoretice. In cadrul aerodinamicii autovehiculelor se stabilesc forele i
momentele ce acioneaz, din partea aerului n repaus sau n micare, asupra
autovehiculelor aflate n micare. De asemenea se analizeaz cile de modificare a
interaciunii dintre aer i autovehicul astfel nct s se mbunteasc performanele
acestora.
Aerodinamica autovehiculelor studiaz cu precdere urmtoarele aspecte:
rezistena la naintare datorat aerului i cile pentru micorarea acesteia;
efectele interaciunii cu aerul asupra stabilitii autovehiculelor i metode de
mbuntirea stabilitii aerodinamice;
efectele interaciunii cu aerul asupra aderenei autovehiculelor cu calea de rulare
i metode de cretere a acesteia;
micarea aerului n interiorul autovehiculului i alegerea adecvat a diferitelor
orificii de absorbie i evacuare a aerului n vederea ventilrii caroseriei i a rcii
diferitelor organe.
Pentru a urmri aceast influena se consider corpuri simple i corpuri de caroserie
pentru care au fost determinai coeficienii rezistenei aerului c
x
.
Acest coeficient c
x
este strns legat de forma corpului i de aceea modificri ale
diferitelor detalii sau componente ale caroseriei permit micorarea acestuia, aceasta
fr a afecta imaginea de ansamblu a autovehiculului.
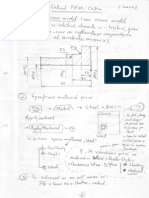
3.2.2. Calculul rezistenei aerului.
- Pentru calculul rezistenei se recomand utilizarea relaie:
2
x a
v A c
2
1
R =
- unde: - este densitatea aerului: =1,225 kg/m
3
o c
x
coeficientul de rezisten al aerului;
o A aria seciunii transversale maxime;
o v viteza de deplasare a autovehiculului [m/s].
o Aria transversal maxim se determin cu suficient precizie (erori sub
5%) dup desenul de ansamblu al automobilului n vedere frontal
utiliznd relaia:
A=BH=1,5751,665=2,622 m
2
unde: B este ecartamentul autovehiculului [m];
H este nlimea autovehiculului [m].
Tabelul 3.2. Valori medii ale parametrilor aerodinamici
Tipul autovehiculului A [m] C
x
Automobil sport 1,0-1,3
0,2-
0,25
Autoturism cu caroseria
nchis
1,6-2,8 0,3-0,5
Autoturism cu caroseria
deschis
1,5-2,0
0,65-
0,8
Autobuz 3,5-7,0 0,7-0,8
Autocamion cu plaform
deschis
3,0-5,3 0,9-1,0
Autotren rutier, cu dou
elemente caroserie platform
4,0-5,3
1,0-
1,25
Autofurgon 3,5-8,0
0,6-
0,75
Autotren rutier cu dou
elemente coroserie furgon
7,0-8,0
0,95-
1,0
Ca urmare a studierii soluiilor similare i a recomandrilor din tabelul 3.2. avnd
pentru autovehicul o vitez maxim de 160km/h adopt pentru coeficientul rezistenei
aerului valoarea: c
x
=0,3
3.3. Rezistena la urcarea pantei
Rezistena pant este o for care acioneaz asupra automobilului n sensul
direciei de deplasare ca urmare a configuraiei n plan longitudinal a drumului.
n cazul n care automobilul urc o pant aceast for se opune autopropulsrii
n timp ce la coborrea unei pante devine o for activ.
Aceast for nu are legtur 35irect cu construcia automobilului ci este
determinat de construcia drumului i a categoriei de drumuri destinate tipului de
autovehicul.
Rezistena la pant se exprim de regul prin unghiul de nclinare longitudinal al
drumului n grade sau procentual prin diferena de nivel dup un parcurs orizontal de
100m.
n funcie de categoria drumurilor, drumurile modernizate se realizeaz cu o
nclinare longitudinal de cel mult 17 iar drumurile nemodernizate pot ajunge pn la
20, n cazul autovehiculelor cu traciune integral tot teren capacitea de deplasare pe
ci cu nclinare longitudinal poate ajunge pn la 30-35.
Evaluarea analitic a acestei rezistene:
[N]
unde este unghiul de nclinare longitudinal a drumului.
Tabelul 3.3. Valori medii si maxime ale unghiului de nclinare longitudinal a cii
Tipul autovehiculului Valori medii Valori maxime
admise
Autovehicule cu o singur
punte motoare
17-19 22
Autovehicule cu dou puni
motoare
28-32 35
Pentru autovehiculul din zon destinat s se deplaseze i n afara ci
nemodernizate adopt unghiul de nclinare longitudinal a drumului 32.
N
3.4. Rezistena la demarare
Rezistena la demare este o for ce se manifest n regimul tranzitoriu de
cretere a vitezei.
Procesul sporirii vitezei de translaie a automobilului este consecina sporirii
viteyei unghiulare de rotaie a roilor respectiv a pieselor aflate n micare de rotaie ale
grupului motopropulsor.
Drept urmare n regim tranzitoriu accelerat aupra automobilului se manifest
simultan o for de inerie n micare de translaie corespunztor masei automobilului la
creterea vitezei cu acceleraia
i un moment de inerie corespunztor creterii
vitezei unghiulare a pieselor grupului motopropulsor cu acceleraia unghiular
,
unde este viteza unghiular de rotaie corespunztoare.
Pentru evaluarea aciunii simultane a forei de inerie n translaie i a
momentelor de inerie n rotaie asupra automobilului se consider automobilul ca
avnd o mas echivalent pentru care energia n translaie este egal cu energia
automobilului real corespunztoare masei n micare de translaie i peselor n micare
de rotaie. Acest mas se evolueaz cu relaia:
, unde
este masa
automobilului iar este coeficientul de influien al maselor aflate n micare de rotaie.
Acest coeficient se evolueaz cu relaia:
unde:
-
este coeficient de influien al maselor mobile ale motorului reduse la
arborele cotit al motorului;
-
este coeficientul de influien al roilor automobilului;
-
este raportul de transmitere al cutiei de viteze respectiv mrimea care
modific raportul dintre turaia motorului i turaiile roiilor.
n cazul automobilului de proiectat n funcie de caracteristicilebconstructive
adoptate i n corelaie cu valorile recomandate categoriei respective de autovehicul se
adopt valoarea
.
n condiiile de mai sus evaluarea rezistenei la demarare se face cu relaia:
unde:
-
este masa automobilului:
kg
-
este coeficientul de influien al maselor mobile ale motorului reduse la
arborele cotit al motorului:
;
-
este raportul de transmitere al cutiei de viteze:
;
-
este coeficientul de influien al roilor automobilului
;
-
este acceleraia autovehiculului n treapta nti: m/s
2
.
[N]
3.5. Ecuaia general de micare rectilinie a automobilului
Pentru stabilirea ecuaiei generale de micare se consider automobilul n
micare rectilinie, pe o cale cu nclinare o, n regim tranzitoriu de vitez cu acceleraie
pozitiv.
Echilibrul dinamic al automobilului este date de bilanul de traciune, care
reprezint ecuaia de echilibru dup direcia vitezei automobilului, de forma:
d p a r R
R R R R F + + + = [N]
n care:
R
F este fora activ;
d p a r
R , R , R , R rezistenele la naintare.
Bilanul de traciune exprim egalitatea dintre fora total la roat obinut prin
nsumarea forelor tangeniale de la toate roile motoare i suma rezistenelor la
naintarea autovehiculelor, de unde rezult:
)
2
v A
x
C
2
1
cos
a
G sin f
a
G
R
I (
a
m
1
dt
dv
o o
o
=
sau:
)
2
v A
x
C
2
1
a
G
R
F (
a
m
1
dt
dv
o
=
n care fora F
R
numit fora la roat reprezint aciunea momentului motor asupra
roilor. Expresia analitic a acestei fore este:
v
P
r
i M
F
t
r
t tr
R
q
=
q
=
unde:
M este momentul dintr-un punct de pe caracteristica exterioar corespunztor unei
turaii n a motorului;
P este puterea n aceleai condiii;
TR
q este randamentul transmisiei;
i
tr
este raportul de transmitere al transmisiei;
r
r
este raza de rulare a roilor;
v este viteza de deplasare a automobilului.
n funcie de condiiile de autopropulsare ale automobilului, din ecuaia de
micare (3.19) se definesc mai multe forme particulare i anume:
a) Deplasarea cu vitez maxim.
Prin convenie viteza maxim este cea mai mare valoare a vitezei cu care
automobilul se poate deplasa pe o cale orizontal. Ca urmare n condiiile vitezei
maxime cnd 0 = o i 0
dt
dv
. const v v
max
= = = din expresia ecuaiei de micare dat de
relaia (3.19) se obine forma particular:
| | N v A C
2
1
f G F
2
max x a v R
max
+ =
| | N F
v R
1917
6 , 3
200
62 . 2 3 , 0 225 , 1
2
1
022 , 0 19650
2
max
= |
.
|
\
|
+ =
b) Deplasarea pe calea cu nclinare longitudinal maxim sau pe calea cu
rezisten specific minim
Deplasarea pe panta maxim (sau pe cale cu rezistena specific maxim) se
obine cnd ntreaga for disponibil este utilizat pentru nvingerea rezistenelor
legate de tipul i caracteristicile drumului
+
R . Pentru acest caz, avnd n vedere i
faptul c la viteze mici, specifice deplasrii automobilului pe panta maxim, rezistena
aerului este neglijabil n raport cu celelalte fore din expresia forei la roat dat de
relaia (3.20) se obine forma particular:
o + o = + sin cos f este coeficientul rezistenei totale a cii de rulare.
32 = o valoare inpusa prin tema de proiectare
55 , 0 32 sin 32 cos 022 , 0 sin cos = + = + = +
o o f
max a R
G F
max
=
+
|N|
4. Calculul de traciune
Calculul de traciune se face n scopul determinrii parametrilor principali ai motorului
i transmisiei, astfel ca autovehiculul proiectat cu caracteristicile definite anterior s fie
capabil de realizarea performanelor prescrise n tema de proiectare sau a
performanelor celor mai bune modele existente sau de perspectiv.
4.1. Alegerea randamentului transmisiei
Pentru autorpopulsarea autovehiculului puterea
dezvoltat de motor trebuie transmis ctre roile motoare.
Transmiterea fluxului de putere este caracterizat de
pierderi datorate fenomenelor de frecare din organele
transmisiei. n mod experimental au fost deduse
randamentele subansamblelor componente ale transmisiei.
Deoarece valoarea global a randamentului transmisiei
depinde de numeroi factori a cror influena este dificil de
apreciat, n calculele ce vor urma se va opera cu o valoare
adoptat a randamentului
din figura alturat.
4.2. Determinarea caracteristicii exterioare a motorului
Autopropulsarea autovehiculului se datoreaz energiei mecanice primite de
roile motoare de la motorul automobilului. Ea este posibil cnd oferta fcut de
motor este n concordana cu necesarul de moment i puteri, necesar determinat din
condiiile n care se deplaseaz autovehiculul.
Aprecierea motorului ca surs de energie pentru autopropulsarea
autovehiculului se face prin oferta de putere i moment. Oferta se exprim funcie de
turaia arborelui motor printr-un cmp de caracteristici ) si numite
caracteristici de turaie. Domeniul de ofert este limitat de caracteristica la sarcin
total (caracteristica exterioar) care determin posibilitile maxime ale motorului n
privina puterii i momentului la fiecare turaie din domeniul turaiilor de funcionare al
motorului.
4.2.1. .Alegerea tipului motorului
Pentru propulsarea autovehiculelor, majoritatea motoarelor sunt motoare cu
ardere intern cu piston n micare de translaie. Existena unei mari varieti de
motoare cu ardere intern cu piston impune alegerea unor criterii de selecie bine
definite. Opiunea pentru unul dintre tipuri are n vedere n principal modelul,
caracteristicile i destinaia autovehiculului.
n cazul n care se caut tipul de motor care va echipa un auotvehicul nou
proiectat este necesar analiza atent a motoarelor care echipeaz soluiile similare,
dup care se alege tipul motorului ce va echipa autovehiculul de proiectat i se rein,
eventual, valori ale puterii maxime, ale momentului motor maxim i turaiile
corespunztoare acestora, consumurile de combustibil pe care motoarele respective
le realizeaz. Pentru un automobil ce trebuie proiectat, inand cont i de motorizrile
soluiilor similare ce au fost prezentate la CAP.1, se adopt un motor cu aprindere
prin comprimare.
4.2.2. Determinarea analitica a caracteristicii exterioare
Pentru evaluarea unei caracteristici ce nu poate fi determinate pe stand este
necesar s se cunoasc cel puin
si
(pentru m.a.s.) i
(pentru
m.a.c.)
Pe baza studiului realizat asupra soluiilor similare se aleg ca valori
semnificative:
- Turaia de mers n gol a motorului
- Turaia de moment maxim
- Turaia de consum specific minim
- Turaia de putere maxim
- Turaia maxim de funcionare a motorului
Pentru determinarea datelor pe baza crora se face trasarea acestor
caracteristici, trebuiesc calculai o serie de coeficieni, i anume:
- Coeficientul de elasticitate al motorului
- Coeficientul de adaptabilitate al motorului
- Coeficientul
- Coeficientul
- Coeficientul
Din definirea puterii ca produs ntre fora i viteza realizarea performanelor
de vitez maxim, n condiiile prevzute, presupune pentru motor dezvoltarea unei
puteri de forma:
unde :
-
este puterea necesar pentru atingerea vitezei maxime;
-
este fora la roat la vitez maxim ;
-
este viteza maxim de deplasare ;
-
este randamentul transmisiei .
Pentru completarea caracteristicii exterioare cu curba consumului specific de
combustibil se propune utilizarea relaiei:
] *
+
,unde
este consumul specific de combustibil la turatia de putere maxima a
motorului. Aceasta valoare se alege in functie de tipul motorului si de destinatia
autovehiculului proiectat. Pentru cazul de fata vom alege o valoare
.
Tabelul 4.1. Valori ale turaiilor semnificative ale motorului
Turaia n
0
n
M
n
ce
n
P
n
max
Valoarea 800 2500 2500 4000 4000
Tabelul 4.2. Valori ale coeficienilor caracteristici ai motorului
Coeficientul ce ca
Valoarea 0.63 1.19 0.65 1.70 -1.35
Tabelul 4.3. Valori pentru trasarea caracteristici exterioare a motorului
n [rot/min] P [kW] M [Nm] ce [g/kWh]
800 23.46 280.01 309.6
1000 31.03 296.35 300
1200 39.04 310.67 291.6
1400 47.35 322.98 284.4
1600 55.83 333.26 278.4
1800 64.37 341.52 273.6
2000 72.83 347.77 270
2200 81.09 351.99 267.6
2400 89.01 354.20 266.4
2500 92.81 354.55 266.25
2800 103.37 352.55 267.6
3000 109.54 348.70 270
3200 114.88 342.83 273.6
3500 121.03 330.24 281.25
3600 122.53 325.03 284.4
3800 124.59 313.10 291.6
4000 125.30 299.16 300
Fig.4.1. Puterea i cuplul dezvoltat de motor n funcie de turaia acestuia
Fig.4.2. Consumul de combustibil n funcie de turaia motorului
4.3. Determinarea marimii rapoartelor de transmitere ale transmisiei
Functionarea automobilului in conditii generale de exploatare are loc in regim
tranzitoriu, gama rezistentelor la inaintare fiind foarte mare. In aceste conditii rezulta ca
la rotile motoare ale autovehiculului necesarul de forta de tractiune si de putere la roata
sunt campuri de caracteristici avand in abscisa viteza aleasa de conducator. Pentru ca
sa poata acoperi cu automobilul acest camp de caracteristici transmisia trebuie sa ofere
un asemnea camp. La transmisiile in trepte, pentru a acoperi campurile de oferta in
0
50
100
150
200
250
300
350
400
20
30
40
50
60
70
80
90
100
110
120
130
140
0 1000 2000 3000 4000 5000
M
[
N
m
]
P
[
k
W
]
n [rot/min]
Putere i cuplul dezvoltat n funcie de turaia
motorului
P [kW]
M [Nm]
250
260
270
280
290
300
310
320
0 500 1000 1500 2000 2500 3000 3500 4000 4500
c
e
p
[
g
/
k
w
h
]
n [rot/min]
Consumul specific de combustibil n funcie de
turaia motorului
transmisie sunt realizate mai multe rapoarte de transmitere. Determinarea rapoartelor
de transmitere presupune formularea conditiilor de deplasare.
4.3.1 Determinarea valorii maxime a raportului de transmitere al transmisiei
Pentru valoarea maxim a raportului de transmitere, obinut cnd este cuplat
prima treapt de vitez n cutia de viteze, se pot formula ca performane dinamice
independente sau simultane urmatoarele:
-Panta maxim sau rezistena specific a cii
;
-Acceleraia maxim la pornire din loc
;
Performanele date prin forele la roat necesare pot fi formulate ca valori
maxime cnd forele la roat oferite prin transmisie au valori maxime, respectiv:
-
la autovehiculele cu o singur punte motoare;
-
la autovehiculele cu traciune integral;
unde:
-
este raportul de transmitere al primei trepte din cutia de viteze ;
-
este raportul de transmitere al transmisiei principale ;
-
este raportul de transmitere al reductor-distribuitorului .
La limita aceasta condiie se scrie ca
, unde :
- se numete coeficient de aderen i depinde de natura cii de rulare. Se adopt
-
este raza dinamic a roilor autovehiculului ;
-
este momentul motor maxim i a fost calculat anterior ;
-
este randamentul transmisiei autovehiculului proiectat i are valoare
;
-
reprezinta greutatea aderenta pe puntea/puntile motoare. Pentru cazul unei
transmisii 4x4 , greutatea aderent se determin cu relaia:
Greutatea aderenta devine
n aceste condiii raportul de transmitere maxim al transmisiei are valoarea:
Adopt raportul necesar n treapta reductoare a reductor-distrubuitorului
4.3.2 Determinarea valorii minime a raportului de transmitere al transmisiei
Valoarea minim a raportului de transmitere al transmisiei este determinat din
condiia cinematic de realizare a vitezei maxime de performan cnd motorul
funcioneaz la turaia maxim.Acest lucru se scrie ca:
Pentru cazul autovehiculului proiectat se obtine :
Valoarea raportului de transmitere al transmisiei principale este :
4.3.3. Determinarea numarului de trepte pentru cutia de viteze si a marimii
rapoartelor de transmitere ale transmisiei
n absena altor condiii de dimensionare a transmisiei, valoarea minim se
consider realizat printr-o cutie de vitez avnd treapta final treapta cu raport de
priza direct
. n acest caz
n cazul etajrii cutiei n progresie geometric, ntre valoarea maxim i minim,
n cutia de viteze sunt necesare n trepte date de relaia:
Se adopt un numr de trepte de viteza Fiind determinat numrul de
trepte i innd seama ca
, ntr-o treapt k raportul de transmitere este dat de
relaia:
Aplicnd relaia anterioar pentru fiecare treapt de vitez se obin urmatoarele
valori:
- raportul de transmitere in treapta a doua :
- raportul de transmitere in treapta a treia :
- raportul de transmitere in treapta a patra :
- raportul de transmitere in treapta a cincea :
Calculul raportului de transmitere subunitar
Raportul de transmitere subunitar se calculeaz dup ce n prealabil s-au stabilit
turaia, respectiv viteza economic de deplasare a autovehiculului. n mod
convenional, turaia economic se alege ca fiind o valoare apropiat de turaia de
moment maxim, aflat n dreapta acesteia pe abscisa ce cuprinde turaiile motorului
cu care este echipat autovehiculul. Pentru cazul autovehiculului proiectat, se alege o
valoare a turatiei economice
. Viteza economic este de
asemenea un parametru ce se alege convenional, ea depinznd de numeroi
factori cum ar fi tipul i construcia autovehiculului, normele de legislaie rutier
aplicabile n zona unde se produce autovehiculul etc. n unele situaii viteza
economic poate fi precizat de constructor.Pentru cazul autovehiculului proiectat,
se alege o valoare a vitezei economice
.
n aceste condiii, raportul de transmitere subunitar va avea valoarea:
4.3.4. Trasarea diagramei fierastrau
Diagrama fierstru reprezint dependena grafic dintre viteza unghiular la
nivelul arborelui cotit al motorului i viteza de deplasare a autovehiculului aflat ntr-o
treapt de viteza. Determinarea pe cale analitic a acesteia s-a facut dup cum
urmeaz:
n
[rot/min]
[rad/s]
v1
[km/h]
v2
[km/h]
v3
[km/h]
v4
[km/h]
v5
[km/h]
800 83.78 7.79 11.73 17.65 26.57 40
1000 104.72 9.74 14.66 22.07 33.22 50
1200 125.66 11.69 17.59 26.48 39.86 60
1400 146.61 13.64 20.52 30.89 46.50 70
1600 167.55 15.58 23.46 35.31 53.15 80
1800 188.50 17.53 26.39 39.72 59.79 90
2000 209.44 19.48 29.32 44.14 66.43 100
2200 230.38 21.43 32.25 48.55 73.08 110
2400 251.33 23.38 35.19 52.96 79.72 120
2500 261.80 24.35 36.65 55.17 83.04 125
2800 293.22 27.27 41.05 61.79 93.01 140
3000 314.16 29.22 43.98 66.20 99.65 150
3200 335.10 31.17 46.91 70.62 106.29 160
3500 366.52 34.09 51.31 77.24 116.26 175
3600 376.99 35.06 52.78 79.44 119.58 180
3800 397.94 37.01 55.71 83.86 126.23 190
4000 418.88 38.96 58.64 88.27 132.87 200
5. Calculul performanelor dinamice ale autovehiculului
5.1. Performanele dinamice de trecere
Performanele reprezint posibilittile maxime ale autovehiculului n privina
vitezei, demarajului i capacitii de frnare, precum i indici de apreciere ai acestora.
Determinarea performanelor autovehiculului este necesar pentru stabilirea i
cercetarea calitilor dinamice, n cazul autovehiculelor nou proiectate, sau pentru
studierea comportrii lor n exploatare. Studiul performanelor autovehiculelor se face
cu ajutorul bilanului de traciune, bilanului de putere i ecuaiei generale de micare,
pe baza creia se obin parametrii i indici a caracteristici deplasrii n regim tranzitoriu
de accelerare sau frnare.
5.1.1 Bilanul de traciune i caracteristica de traciune
Caracteristica de traciune sau caracteristica forei la roat reprezint curbele de
variaie ale forei la roat n funcie de viteza de deplasare a autovehiculului
pentru fiecare treapt a cutiei de viteze.
Construirea caracteristicii forei la roat se face pe baza caracteristicii exterioare
a motorului, pornind de la curba puterii sau a momentului utiliznd relaiile:
unde
reprezint raportul de transmitere al transmisiei, cnd este cuplat treapta
din cutia de viteze, cu raportul de transmitere
.
unde
este viteza de deplasare n treapta ;
- este turaia motorului corespunzatoare ordonatelor M sau P din caracteristica
exterioar a motorului.
Determinarea pe cale analitic a caracteristicii de traciune se face pe baza
urmtorului tabel:
Tabelul 5.1.1. Determinarea pe cale analitic a caracteristicii de traciune
v
1
[km/h]
F
R1
[N]
v
2
[km/h]
F
R2
[N]
v
3
[km/h]
F
R3
[N]
v
4
[km/h]
F
R4
[N]
v
5
[km/h]
F
R5
[N]
8 9212 12 6120 18 4066 27 2701 40 1794
10 9750 15 6477 22 4303 33 2859 50 1899
12 10221 18 6790 26 4511 40 2997 60 1991
14 10625 21 7059 31 4690 47 3115 70 2070
16 10964 23 7284 35 4839 53 3215 80 2136
18 11236 26 7464 40 4959 60 3294 90 2189
19 11441 29 7601 44 5050 66 3355 100 2229
21 11580 32 7693 49 5111 73 3395 110 2256
23 11653 35 7741 53 5143 80 3417 120 2270
24 11664 37 7749 55 5148 83 3420 125 2272
27 11599 41 7705 62 5119 93 3401 140 2259
29 11472 44 7621 66 5063 100 3364 150 2235
31 11279 47 7493 71 4978 106 3307 160 2197
34 10864 51 7218 77 4795 116 3186 175 2116
35 10693 53 7104 79 4719 120 3135 180 2083
37 10301 56 6843 84 4546 126 3020 190 2006
39 9842 59 6538 88 4344 133 2886 200 1917
Forma caracteristicii de traciune este prezentat n figura de mai jos:
Fig. 5.1.1 Caracteristica de traciune
0
2000
4000
6000
8000
10000
12000
14000
0 50 100 150 200 250
[
N
]
v [km/h]
Caracteristica forei la roat
Fr1 [N]
Fr2 [N]
Fr3 [N]
Fr4 [N]
Fr5 [N]
Pentru studiul performanelor autovehiculului la deplasare pe un anumit drum,
caracterizat de o nclinare longitudinal i un coeficient de rezisten la rulare
caracteristica de traciune se completeaz cu bilanul de traciune, dat de relaia:
n cazul de fa se consider deplasarea pe o cale de nclinare longitudinala
, ceea ce nseamn c bilanul de traciune va fi dat de relaia:
.
Rescriind relaia de mai sus sub forma
n membrul stng se
obine fora disponibil care poate fi folosit la nvingerea rezistenelor drumului i la
accelerarea autovehiculului.
Determinarea analitic a bilanului de traciune se face pe baza urmtorului tabel:
Tabelul 5.1.2. Determinarea pe cale analitic bilanului de traciune
v [km/h] R
r
[N] R
a
[N] R
r
+R
a
[N] F
R5
[N] F
R5
-R
a
[N]
40 432 59.39 491.69 1794 1735
50 432 92.80 525.10 1899 1806
60 432 133.63 565.93 1991 1857
70 432 181.89 614.19 2070 1888
80 432 237.57 669.87 2136 1898
90 432 300.67 732.97 2189 1888
100 432 371.20 803.50 2229 1857
110 432 449.15 881.45 2256 1807
120 432 534.53 966.83 2270 1735
125 432 580.00 1012.30 2272 1692
140 432 727.55 1159.85 2259 1532
150 432 835.20 1267.50 2235 1399
160 432 950.27 1382.57 2197 1247
175 432 1136.80 1569.10 2116 979
180 432 1202.69 1634.99 2083 880
190 432 1340.03 1772.33 2006 666
200 432 1484.80 1917.10 1917 432
Reprezentarea grafic a bilanului de traciune este prezentat n figura de mai
jos:
0
500
1000
1500
2000
2500
0 50 100 150 200 250
[
N
]
v [km/h]
Fora excedentar
Rr [N]
Fr5 [N]
Fr5-Ra [N]
Fig. 5.1.2. Bilanul de traciune i fora excedentar
0
500
1000
1500
2000
2500
0 50 100 150 200 250
[
N
]
v [km/h]
Bilanul de traciune
Rr [N]
Fr5 [N]
Rr+Ra [N]
5.1.2. Bilanul puterilor i caracteristica puterilor
Caracteristica puterilor este reprezentarea grafic a bilanului de putere n funcie
de viteza automobilului pentru toate treptele de vitez. Bilanul de putere al
automobilului reprezint echilibrul dinamic dintre puterea la roat
i suma puterilor
necesare nvingerii rezistenelor la naintare, respectiv rezistena la rulare, rezistena la
urcarea pantei, rezistena aerului i rezistena la demaraj, dat de relaia:
unde:
-P este puterea motorului pe caracteristica extern;
-
este randamentul transmisiei .
Determinarea pe cale analitic a caracteristicii puterilor se realizeaz cu
ajutorul tabelului de mai jos:
Tabelul 5.1.3. Determinarea pe cale analitica a caracteristicii puterilor
v
1
[km/h]
P
R1
[W]
v
2
[km/h]
P
R2
[W]
v
3
[km/h]
P
R3
[W]
v
4
[km/h]
P
R4
[W]
v
5
[km/h]
P
R5
[W]
8 19938 12 19938 18 19938 27 19938 40 19938
10 26377 15 26377 22 26377 33 26377 50 26377
12 33182 18 33182 26 33182 40 33182 60 33182
14 40245 21 40245 31 40245 47 40245 70 40245
16 47459 23 47459 35 47459 53 47459 80 47459
18 54715 26 54715 40 54715 60 54715 90 54715
19 61906 29 61906 44 61906 66 61906 100 61906
21 68924 32 68924 49 68924 73 68924 110 68924
23 75661 35 75661 53 75661 80 75661 120 75661
24 78891 37 78891 55 78891 83 78891 125 78891
27 87862 41 87862 62 87862 93 87862 140 87862
29 93109 44 93109 66 93109 100 93109 150 93109
31 97644 47 97644 71 97644 106 97644 160 97644
34 102876 51 102876 77 102876 116 102876 175 102876
35 104146 53 104146 79 104146 120 104146 180 104146
37 105898 56 105898 84 105898 126 105898 190 105898
39 106505 59 106505 88 106505 133 106505 200 106505
Fig. 5.1.3 Caracteristica puterilor
Vom scrie i relaia de mai sus sub forma
ceea ce reprezint
bilanul de putere al autovehiculului, pe o cale cu nclinare longitudinal .
Determinarea pe cale analitic a bilanului de putere se face pe baza urmtorului tabel:
Tabelul 5.1.4 Determinarea pe cale analitica a bilantului de putere
v
5
[km/h] P
r
[W] P
a
[W] P
r
+P
a
[W] P
R5
[W]
40 4803 660 5463 19938
50 6004 1289 7293 26377
60 7205 2227 9432 33182
70 8406 3537 11943 40245
80 9607 5279 14886 47459
90 10808 7517 18324 54715
100 12008 10311 22319 61906
110 13209 13724 26933 68924
120 14410 17818 32228 75661
125 15010 20139 35149 78891
140 16812 28294 45105 87862
150 18013 34800 52812 93109
160 19213 42234 61448 97644
175 21015 55261 76276 102876
180 21615 60134 81749 104146
190 22816 70724 93540 105898
200 24017 82489 106505 106505
11000
21000
31000
41000
51000
61000
71000
81000
91000
101000
111000
0 50 100 150 200
[
W
]
v[km/h]
Puterea la roata
Pr1 [W]
Pr2 [W]
Pr3 [W]
Pr4 [W]
Pr5 [W]
Reprezentarea grafic a bilanului de putere este prezentat n figura de mai jos:
Fig. 5.1.4 Bilanul de putere
5.1.3. Caracteristica dinamic i factorul dinamic
Prezena greutii ca factor dimensional, caracteristic al automobilului din
membrul stng al relaiei face ca performanele obinute prin studiul diagramei din
figura 5.1.2. sa nu fie concludente ca termeni de comparare deoarece la valori egale ale
foei excedentare calitile dinamice ale automobilului nu sunt egale.
De aceea, aprecierea calitilor de autopropulsare se face cu ajutorul factorului
dinamic, care reprezint o for excedentar specific, deci un parametru adimensional
dat de raportul dintre fora de traciune excedentar
i greutatea automobilului
,
respectiv:
de unde rezult ca
Factorul dinamic se determin cu expresia:
Determinarea pe cale analitic a factorului dinamic pentru fiecare din cele 5
trepte de vitez ale autovehiculului proiectat este prezentat n tabelul de mai jos:
0
20000
40000
60000
80000
100000
120000
0 50 100 150 200 250
[
W
]
v [km/h[
Bilanul de putere
Prul [W]
Pr+Pa [W]
Pr5 [W]
Tabelul 5.1.5. Determinarea pe cale analitic a factorului dinamic
v
1
[km/h]
D
1
[-]
v
2
[km/h]
D
2
[-]
v
3
[km/h]
D
3
[-]
v
4
[km/h]
D
4
[-]
v
5
[km/h]
D
5
[-]
8 0.469 12 0.311 18 0.206 27 0.136 40 0.088
10 0.496 15 0.329 22 0.218 33 0.143 50 0.092
12 0.520 18 0.345 26 0.228 40 0.150 60 0.095
14 0.540 21 0.358 31 0.237 47 0.154 70 0.096
16 0.557 23 0.370 35 0.244 53 0.158 80 0.097
18 0.571 26 0.379 40 0.249 60 0.161 90 0.096
19 0.582 29 0.385 44 0.253 66 0.162 100 0.095
21 0.588 32 0.390 49 0.256 73 0.163 110 0.092
23 0.592 35 0.392 53 0.256 80 0.162 120 0.088
24 0.592 37 0.392 55 0.256 83 0.161 125 0.086
27 0.589 41 0.389 62 0.253 93 0.157 140 0.078
29 0.582 44 0.384 66 0.249 100 0.152 150 0.071
31 0.572 47 0.377 71 0.244 106 0.147 160 0.063
34 0.551 51 0.362 77 0.233 116 0.137 175 0.050
35 0.542 53 0.356 79 0.228 120 0.133 180 0.045
37 0.522 56 0.342 84 0.218 126 0.124 190 0.034
39 0.498 59 0.326 88 0.206 133 0.114 200 0.022
Reprezentarea grafic a factorului dinamic n funcie de viteza pentru toate
treptele cutiei de viteze se numete caracteristica dinamic. Forma caracteristicii
dinamice este redat n figura de mai jos:
Fig. 5.1.5 Caracteristica dinamic a autovehiculului
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 50 100 150 200
D
[
-
]
v [km/h]
Caracteristica dinamic
D1 [-]
D2 [-]
D3 [-]
D4 [-]
D5 [-]
5.2. Performane dinamice de demarare
5.2.1. Caracteristicile acceleraiilor i a inversului acceleratiilor
Studiul demarrii autovehiculului presupune determinarea acceleraiei, a timpului
i spaiului de demarare, precum i a indicilor cu ajutorul crora se poate aprecia
capacitatea de sporire a vitezei.
Acceleraia autovehiculului caracterizeaz n general calitile lui de demarare,
deoarece, n condiii egale cu ct acceleraia este mai mare, cu att crete viteza medie
de exploatare. Pentru determinarea acceleraiei, precum i pentru studiul
performanelor de demarare se consider autovehiculul n micare rectilinie, pe o cale
orizontal, n stare bun, cu un coeficient mediu al rezistenei la rulare .
Carateristica acceleraiilor se construiete din caracteristica dinamic, pe baza
relaiei:
Scris pentru o treapt oarecare a cutiei de viteze, relaia de mai sus
devine:
iar dac acceleraia se determin pentru cazul deplasrii pe o
cale orizontal relaia se scrie ca
, unde:
-
este coeficientul rezistenei la rulare ;
-
este coeficientul de influen al maselor n micare de rotaie, pentru treapta a
cutiei de viteze ;
Coeficientul de influen al maselor n micare de rotaie, pentru o anumit
treapt a cutiei de viteze, se calculeaz cu relaia:
Cu valorile stabilite la subcapitolul 3.4. pentru momentul masic de inertie al
pieselor motorului si ambreiajului
, respectiv al unei roti
, se poate
trece la calculul coeficientului
pentru fiecare treapta de viteza in parte:
-
Introducnd n relaia se obine formula de calcul a acceleraiei autovehiculului,
formula pe baza creia se va face determinarea analitic a acceleraiei i trasarea
caracteristicii acceleraiilor, respectiv:
Determinarea pe cale analitic a caracteristicii acceleraiilor se face pe baza
tabelului urmtor:
Tabelul 5.2.1. Determinarea pe cale analitic a aceleraiei autovehiculului
v
1
[km/h]
a
1
[m/s
2
]
v
2
[km/h]
a
2
[m/s
2
]
v
3
[km/h]
a
3
[m/s
2
]
v
4
[km/h]
a
4
[m/s
2
]
v
5
[km/h]
a
5
[m/s
2
]
8 4.166 12 2.773 18 1.790 27 1.115 40 0.649
10 4.421 15 2.946 22 1.904 33 1.186 50 0.685
12 4.644 18 3.097 26 2.003 40 1.245 60 0.710
14 4.835 21 3.227 31 2.087 47 1.294 70 0.725
16 4.994 23 3.334 35 2.155 53 1.331 80 0.730
18 5.122 26 3.420 40 2.208 60 1.357 90 0.725
19 5.219 29 3.483 44 2.246 66 1.371 100 0.710
21 5.283 32 3.525 49 2.269 73 1.374 110 0.685
23 5.316 35 3.545 53 2.277 80 1.366 120 0.649
24 5.321 37 3.547 55 2.275 83 1.358 125 0.628
27 5.287 41 3.519 62 2.246 93 1.316 140 0.548
29 5.225 44 3.474 66 2.208 100 1.274 150 0.482
31 5.131 47 3.406 71 2.155 106 1.220 160 0.406
34 4.931 51 3.264 77 2.047 116 1.119 175 0.273
35 4.849 53 3.206 79 2.003 120 1.080 180 0.223
37 4.660 56 3.073 84 1.904 126 0.992 190 0.117
39 4.439 59 2.918 88 1.790 133 0.894 200 0.000
Reprezentarea grafic a acceleraiei autovehiculului n funcie de viteza de
deplasare, pentru fiecare treapt de vitez n parte, este prezentat n figura de mai jos:
Fig. 5.2.1. . Caracteristica acceleraiilor autovehiculului
Caracteristica inversului acceleraiilor reprezint dependena grafic dintre
inversul acceleraiei
i viteza de deplasare a autovehiculului
. Ea se construiete
pornind de la caracteristica acceleraiilor, calculnd pentru fiecare acceleraie n parte ,
n fiecare treapt, inversul acceleraiei. Caracteristica inversului acceleraiilor se
calculeaz i se construiete n mod convenional pn la
Determinarea pe cale analitic a caracteristicii inversului acceleraiilor se
realizeaz pe baza urmtorului tabel:
Tabelul 5.2.2. Determinarea pe cale analitic a inversului acceleraiilor
v
1
[km/h]
1/a
1
[s
2
/m]
v
2
[km/h]
1/a
2
[s
2
/m]
v
3
[km/h]
1/a
3
[s
2
/m]
v
4
[km/h]
1/a
4
[s
2
/m]
v
5
[km/h]
1/a
5
[s
2
/m]
8 0.2400 12 0.3606 18 0.5586 27 0.8972 40 1.5406
10 0.2262 15 0.3394 22 0.5252 33 0.8435 50 1.4607
12 0.2153 18 0.3228 26 0.4993 40 0.8030 60 1.4085
14 0.2068 21 0.3099 31 0.4792 47 0.7730 70 1.3789
16 0.2002 23 0.2999 35 0.4640 53 0.7514 80 1.3693
18 0.1952 26 0.2924 40 0.4528 60 0.7372 90 1.3788
19 0.1916 29 0.2871 44 0.4452 66 0.7294 100 1.4083
21 0.1893 32 0.2837 49 0.4407 73 0.7277 110 1.4604
23 0.1881 35 0.2821 53 0.4392 80 0.7320 120 1.5403
24 0.1879 37 0.2820 55 0.4396 83 0.7365 125 1.5932
27 0.1891 41 0.2841 62 0.4452 93 0.7600 140 1.8255
29 0.1914 44 0.2879 66 0.4528 100 0.7851 150 2.0753
31 0.1949 47 0.2936 71 0.4640 106 0.8195 160 2.4643
34 0.2028 51 0.3064 77 0.4886 116 0.8936 175 3.6678
35 0.2062 53 0.3119 79 0.4992 120 0.9262 180 4.4806
37 0.2146 56 0.3254 84 0.5251 126 1.0078 190 8.5714
39 0.2253 59 0.3427 88 0.5586 133 1.1190 200
0
1
2
3
4
5
6
0 50 100 150 200
[
m
/
s
^
2
]
v [km/h]
Caracteristica accelaraiilor
a1 [m/s^2]
a2 [m/s^2]
a3 [m/s^2]
a4 [m/s^2]
a5 [m/s^2]
Reprezentarea grafica a caracteristicii inversului acceleraiilor este prezentat n
figura de mai jos:
Fig. 5.2.2. Caracteristica inversului acceleraiilor
5.2.2 Timpul de demarare
Timpul de demarare reprezint timpul necesar pentru ca autovehiculul s-i
sporeasc viteza de la valoarea minim n prima treapt pn la valoarea maxim n
ultima treapt. n mod convenional s-a stabilit ca timpul de demarare se calculeaz
pn la o viteza de 100 km/h. Timpul de demarare se obine prin integrarea numeric a
relaiei
.
Determinarea analitic a timpului de demarare se face pe baza tabelului de mai
jos:
0
1
2
3
4
5
6
7
8
9
10
0 50 100 150 200
[
s
^
2
/
m
]
v[km/h]
Caracteristica inversului acceleraiilor
1/a1 [s^2/m]
1/a2 [s^2/m]
1/a3 [s^2/m]
1/a4 [s^2/m]
1/a5 [s^2/m]
Tabelul 5.2.2. Determinarea analitica a timpului de demarare
Reprezentarea grafic a caracteristicii timpului de
demarare se prezint n figura de mai jos:
Fig. 5.2.2. Timpul de demarare
5.2.3 Spaiul de demarare
Spaiul de demarare reprezint distana parcurs de autovehicul n timpul de
demarare. Determinarea analitic a spaiului de demarare se face pe baza urmtorului
tabel:
Tabelul 5.2.3. Determinarea analitic a spaiului de demarare
Reprezentarea grafic a caracteristicii spaiului
de demarare se prezint n figura de mai jos:
Fig. 5.2.2. Spaiul de demarare
0
10
20
30
40
50
60
70
80
90
0 50 100 150 200
t
d
[
s
]
v [km/h]
Timpul de demarare
0
100
200
300
400
500
600
700
800
900
1000
1100
0 25 50 75 100 125 150 175 200
s
d
[
m
]
v [km/h]
Spaiul de demarare
v [km/h] 1/a [s
2
/m] td [s]
0 0 0
8 0.24 0.5
16 0.2 1.0
23 0.18 1.3
37 0.21 2.2
44 0.28 2.7
56 0.32 3.8
66 0.45 5.1
79 0.49 6.9
84 0.52 7.6
93 0.76 9.5
100 0.78 11.0
116 0.89 15.1
126 1.01 17.9
140 1.82 24.8
150 2.07 30.6
160 2.46 37.5
175 3.66 52.7
180 4.48 59.0
190 8.57 82.8
v [km/h] td [s] sd [m]
0 0 0
8 0.5 1
16 1.0 3
23 1.3 6
37 2.2 14
44 2.7 20
56 3.8 32
66 5.1 47
79 6.9 71
84 7.6 82
93 9.5 106
100 11.0 127
116 15.1 195
126 17.9 245
140 24.8 340
150 30.6 425
160 37.5 529
175 52.7 749
180 59.0 831
190 82.8 1061
5.3. Performanele de frnare
Frnarea este procesul prin care se reduce parial sau total viteza
autovehiculului. Ea se realizeaz prin generarea n mecanismele de frnare ale roilor a
unui moment de frnare ce determin apariia unei fore de frnare la roi ndreptat
dup direcia vitezei autovehiculului, dar de sens opus ei.
Aprecierea i compararea capacitii de frnare a autovehiculului se face cu
ajutorul deceleraiei maxime absolute (af) sau relative (df), a timpului de frnare (tf) i a
spaiului minim de frnare (Sf), n funcie de viteza iniial a autovehiculului.
5.3.1 Determinarea timpului de frnare
Timpul de frnare prezint important mai ales n urma proceselor de lucru ale
dispozitivelor de frnare i mai puin este utilizat pentru aprecierea capacitii de frnare
a autovehiculelor. La frnarea ambelor puni, timpul de frnare poart denumirea de
timpul minim posibil de frnare, i se determin, n cazul frnrii ntre vitezele ,
cu relaia:
(
)
[]
sau n cazul frnrii pn la oprire (
), pe cale orizontal :
[]
unde:
-
este acceleraia gravitaional;
- este coeficientul de aderena;
Pe baza relaiei de mai sus s-a realizat determinarea pe cale analitic a spaiului
de frnre, dupa cum se prezint n tabelul de mai jos:
Tabelul 5.3.2 Determinarea timpului de frnare minim
Reprezentarea grafic a caracteristicii timpului de
frnare minim se prezint n figura de mai jos:
Fig. 5.3.2 Timpul de frnare
5.3.2 Determinarea spaiului de frnare
Dintre parametrii capacitii de frnare spaiul de frnare determin n modul cel
mai direct calitile de frnare n strns legtur cu siguran circulaiei. La frnarea
ambelor puni, spaiul minim de frnare, obinut cnd reaciunile tangenial ajung
simultan la limita de aderen, poart denumirea de spaiu minim posibil de frnare, i
se determin, n cazul frnrii ntre vitezele , cu relaia:
(
)
[]
sau n cazul frnrii pn la oprire (
), pe cale orizontal :
[]
unde:
-
este acceleraia gravitaional;
0
1
2
3
4
5
6
7
8
9
0 50 100 150 200
t
f
[
s
]
v [km/h]
Timpul de frnare
fi=0,7
fi=0,7
v [km/h] tf [s]
200 8.1
190 7.7
180 7.3
170 6.9
160 6.5
150 6.1
140 5.7
130 5.3
120 4.9
110 4.4
100 4.0
90 3.6
80 3.2
70 2.8
60 2.4
50 2.0
40 1.6
30 1.2
20 0.8
10 0.4
0 0.0
- este coeficientul de aderen;
Pe baza relaiei de mai sus s-a realizat determinarea pe cale analitic a spaiului
de frnare, dupa cum se prezint n tabelul de mai jos:
Tabelul 5.3.1. Determinarea spaiului de frnare minim
Reprezentarea grafic a caracteristicii spaiului de frnare
minim se prezint n figura de mai jos:
Fig. 5.3.1. Spaiul de frnare
0
50
100
150
200
250
0 20 40 60 80 100 120 140 160 180 200 220
s
f
[
m
]
v [km/h]
Spaiul de frnare
fi=0,7
fi=0,7
v [km/h] sf [m]
200 225
190 203
180 182
170 162
160 144
150 126
140 110
130 95
120 81
110 68
100 56
90 46
80 36
70 28
60 20
50 14
40 9
30 5
20 2
10 1
0 0
S-ar putea să vă placă și
- Functionare ESPDocument3 paginiFunctionare ESPdentnelyÎncă nu există evaluări
- Proiect BOT STEFAN SRTIM 1272Document22 paginiProiect BOT STEFAN SRTIM 1272Arhip GabiÎncă nu există evaluări
- Reductor CentralDocument4 paginiReductor CentralCalin AlexandruÎncă nu există evaluări
- WikipediaDocument12 paginiWikipediaMargalin MarianÎncă nu există evaluări
- Proiect DarDocument75 paginiProiect DarpuybogdanÎncă nu există evaluări
- Supravirarea Și Subvirarea AutomobilelorDocument4 paginiSupravirarea Și Subvirarea AutomobilelorstaswonderfulÎncă nu există evaluări
- Diagnosticare SuspensieDocument31 paginiDiagnosticare SuspensieCornel CostoiuÎncă nu există evaluări
- Consumul de CombustibilDocument11 paginiConsumul de CombustibilCatalinCosmaÎncă nu există evaluări
- Different Types of ChassisDocument8 paginiDifferent Types of Chassisalynalyn20Încă nu există evaluări
- Capitolul 3Document43 paginiCapitolul 3Ana-Maria RusuÎncă nu există evaluări
- Diverse Sisteme SRS Pentru AutovehiculeDocument18 paginiDiverse Sisteme SRS Pentru AutovehiculeClaudia MădălinaÎncă nu există evaluări
- Autotehnica 07-08 - 2009Document68 paginiAutotehnica 07-08 - 2009Flaviu Bogdan100% (1)
- Enduro ProiectDocument12 paginiEnduro ProiectMadalina DraganescuÎncă nu există evaluări
- c4,5,6 EchipamenteDocument18 paginic4,5,6 EchipamenteMihai FodoranÎncă nu există evaluări
- Tcs Esp AsrDocument10 paginiTcs Esp AsrDoina RomașcuÎncă nu există evaluări
- Ccar IiDocument297 paginiCcar IiȘtefan AndreiÎncă nu există evaluări
- Proiectare AutoooDocument55 paginiProiectare Autooociprikbv87Încă nu există evaluări
- Automobilele Cu Tracțiune Integrală AWDDocument10 paginiAutomobilele Cu Tracțiune Integrală AWDtyibyiÎncă nu există evaluări
- 10 Proiectarea Postului de ConducereDocument10 pagini10 Proiectarea Postului de ConducereDanut Simionescu100% (1)
- Licenta EspDocument30 paginiLicenta EspCarpiuc IoanÎncă nu există evaluări
- 5.transmisia AutovehiculelorDocument24 pagini5.transmisia AutovehiculelorMarius CiofuÎncă nu există evaluări
- Diferentialul Cu Alunecare LimitataDocument7 paginiDiferentialul Cu Alunecare LimitataFlorian VladÎncă nu există evaluări
- Cutia de VitezeDocument16 paginiCutia de VitezeAnonymous KzlB9cieÎncă nu există evaluări
- ReferatDocument10 paginiReferatClaudia MădălinaÎncă nu există evaluări
- Transmisia DCTDocument12 paginiTransmisia DCTMarin ValentinÎncă nu există evaluări
- Diferential Cu Alunecare LimitataDocument7 paginiDiferential Cu Alunecare LimitataDragosPintilieÎncă nu există evaluări
- Sinteze PregatireDocument36 paginiSinteze PregatireALINA LUCREŢIA DUMITRAŞÎncă nu există evaluări
- Proiect MSOCRDocument40 paginiProiect MSOCRSodomanu CosminÎncă nu există evaluări
- Mecanismul de Suspensie TRICA DANIELDocument23 paginiMecanismul de Suspensie TRICA DANIELDaniel Trică100% (1)
- Sistemul ESP (Electronic Stability Program)Document29 paginiSistemul ESP (Electronic Stability Program)Loghin Bogdan AndreiÎncă nu există evaluări
- 11 Aerodinamica AutovehiculelorDocument15 pagini11 Aerodinamica AutovehiculelorDanut SimionescuÎncă nu există evaluări
- Tolea Bogdan - RezumatDocument87 paginiTolea Bogdan - RezumatJeffrey HarrisonÎncă nu există evaluări
- Adaptarea Vitezei in Functie de Oboseala, Varsta Sau Experienta Conducatorului AutoDocument44 paginiAdaptarea Vitezei in Functie de Oboseala, Varsta Sau Experienta Conducatorului AutoNarcisDanielPetreaÎncă nu există evaluări
- Diferential AutoblocantDocument17 paginiDiferential AutoblocantStefan MateiÎncă nu există evaluări
- Proiect Automobile IDocument184 paginiProiect Automobile IDan AlexandruÎncă nu există evaluări
- AirbagDocument16 paginiAirbagSeby AndreiÎncă nu există evaluări
- Introducere BDocument11 paginiIntroducere BDan AlexandruÎncă nu există evaluări
- Sistemul de Franare ABSDocument19 paginiSistemul de Franare ABSNorbertÎncă nu există evaluări
- L14 Protectia PasagerilorDocument4 paginiL14 Protectia PasagerilorAndrei PravăţÎncă nu există evaluări
- 11 - Puntea Din SpateDocument6 pagini11 - Puntea Din SpatecccounterrrÎncă nu există evaluări
- Laborator DIADocument10 paginiLaborator DIAMihai CardosÎncă nu există evaluări
- Proiect AutomobilDocument62 paginiProiect AutomobilBogdan IstrateÎncă nu există evaluări
- Diferentialul AutoDocument8 paginiDiferentialul AutoAle AlexusÎncă nu există evaluări
- Franare RegenerativaDocument3 paginiFranare RegenerativaIonel ApostolÎncă nu există evaluări
- Memoriu Tehnic CCA2 Transmisie CardanicaDocument8 paginiMemoriu Tehnic CCA2 Transmisie CardanicaRadu JohnnyÎncă nu există evaluări
- Sisteme de Siguranta La Masinile CabrioDocument14 paginiSisteme de Siguranta La Masinile CabrioBogdan StefanÎncă nu există evaluări
- Cca15 Rom CDDocument3 paginiCca15 Rom CDIstvan CsekeÎncă nu există evaluări
- ProiectDocument13 paginiProiectGheorghe CojocariÎncă nu există evaluări
- Dinamica AutovehiculelorDocument41 paginiDinamica Autovehiculelorandreeaoana45Încă nu există evaluări
- RazvanDocument15 paginiRazvanRăzvan VişoiuÎncă nu există evaluări
- Sisteme de Siguranta ActivaDocument6 paginiSisteme de Siguranta ActivaHarpa Marian100% (1)
- Proiect Sistem FranareDocument49 paginiProiect Sistem FranareLilian GLÎncă nu există evaluări
- Automobile RomanestiDocument195 paginiAutomobile RomanestiAlex TanaseÎncă nu există evaluări
- ПрезентацияDocument7 paginiПрезентациянику ботинÎncă nu există evaluări
- A. Prezentarea Celor 2 AutoturismeDocument3 paginiA. Prezentarea Celor 2 AutoturismeBogdan RaduÎncă nu există evaluări
- Dacia LoganDocument6 paginiDacia LoganJessica GillÎncă nu există evaluări
- Taskuri Chat GPT - ALE - DNDocument23 paginiTaskuri Chat GPT - ALE - DNplayfuldobreÎncă nu există evaluări
- Evolutia Designului Autoturismului DaciaDocument13 paginiEvolutia Designului Autoturismului DaciaMihuta CristianÎncă nu există evaluări
- Studiu de Caz Dacia AutomobileDocument29 paginiStudiu de Caz Dacia AutomobileGaspar Catalin100% (2)
- Prezentarea Strategiei IntreprinderiiDocument34 paginiPrezentarea Strategiei IntreprinderiiPopa AncutaÎncă nu există evaluări
- Butuc Roata SpateDocument17 paginiButuc Roata SpateVoicu ClaudiuÎncă nu există evaluări
- Proiect Cca Nutu PDFDocument59 paginiProiect Cca Nutu PDFVoicu Claudiu100% (1)
- AMDEC Proiect + Produs +QQOQCPDocument9 paginiAMDEC Proiect + Produs +QQOQCPVoicu ClaudiuÎncă nu există evaluări
- Proiectarea Unui Sistem Informatic A Gestiunii Stocurilor Din Cadrul Unei IntreprinderiDocument1 paginăProiectarea Unui Sistem Informatic A Gestiunii Stocurilor Din Cadrul Unei IntreprinderiVoicu ClaudiuÎncă nu există evaluări
- Capitolul 6 BoltDocument2 paginiCapitolul 6 BoltVoicu ClaudiuÎncă nu există evaluări
- Untaru Calculul Si Constructia AutomobilelorDocument1 paginăUntaru Calculul Si Constructia AutomobilelorVoicu ClaudiuÎncă nu există evaluări
- Fra - Proiect Arbore Intermeiar TTTTDocument36 paginiFra - Proiect Arbore Intermeiar TTTTDany BitzaÎncă nu există evaluări
- ADEZIVIDocument12 paginiADEZIVIVoicu ClaudiuÎncă nu există evaluări
- Proiect - TFA ArboreDocument33 paginiProiect - TFA Arborealterego88100% (2)
- Proiect Cutie DistributieDocument17 paginiProiect Cutie DistributiePaula Draghiciu100% (1)
- Calcul ButucDocument6 paginiCalcul ButucVoicu ClaudiuÎncă nu există evaluări