Varianta A
1. Ce reprezinta figura de mai jos? Prezentati constructia si functionarea.
Fig.1.7. Tipuri constructive de baza pentru pivoti si fuzete la punti articulate cu mecanism patrulater
transversal de ghidare: a) punte motoare cu pivoti sferici: 1 si 2-fuzeta cu sectiune tubulara; 3-pivot
sferic superior; 4-pivot sferic inferior; 5-brat superior; 6-brat inferior; b) punte nemotoare cu pivoti
sferici: 1 si 2- fuzeta cu sectiune circulara plina; 3-pivot sferic superior; 4-pivot sferic inferior; 5-brat
superior; 6-brat inferior
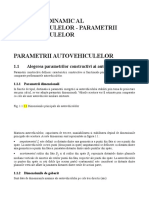
Fig.1.8. Punte nemotoare cu mecanism patrulater transversal si articulatii cilindrice: 1-portfuzeta; 2-brat
inferior; 3-tampon limitator superior de cursa; 4-lagar pivot cu rulment cu ace; 5-rulment axial pentru preluarea
fortelor verticale; 6-pivot cilindric; 7-brat superior; 8-tampon limitator inferior de cursa; 9-amortizor telescopic;
10-arc elicoidal; 11-suport ghidare arc.
In figura 1.7 sunt prezentate tipuri constructive de baza pentru pivoti si fuzete la puntile fractionate cu
mecanism patrulater transversal de ghidare. In acest caz fuzeta trebuie sa se roteasca in jurul axei pivotului dar
si sa permita oscilatia rotii fata de mecanismul de ghidare.
Puntile fractionate (articulate)sunt puntile la care, la trecerea peste un obstacol, deplasarea unei roti nu
impune si deplasarea celeilalte roti (rotile se pot deplasa independent) deoarece lipseste legatura rigida dintre
roata din stanga si din dreapta.
Intre cele 2 fig.1.7 si 1.8 se constata inlocuirea articulatiilor sferice cu articulatii [Link]
solutie se aplica atat in cazul mec patrulater transversal cat si in cazul mec [Link] cilindrice
sunt mai simple si mai fiabile, unghiul de inclinare transversala al pivotilor si deportul transversal pot avea
valori mai mici; dispunerea amortizorului se face cu mai putine constrangeri, iar in cazul puntii McPherson
solicitarile lui sunt mai reduse.
Constructia puntii, indeosibi in zona fuzetei si a butucului rotii, este influentata si de tipul mecanismului
de franare folosit, respectiv mecanism cu disc si placheti sau mecanism cu tamburi si saboti interiori.
Puntea din fata motoare fractionata, cu mecanism patrulater transversal cu brate neegale, se utilizeaza
pentru autoturismele cu motorul dispus longitudinal.
Daca bratele mecanismului patrulater transversal sunt orizontale (paralele cu calea) centrul de ruliu este
in planul caii de rulare, la intersactia planului longitudinal de simetrie cu calea.
Puntea din fata fractionata cu mecanism patrulater transversal cu axele bratelor paralele si orizontale are
centrul de tangaj la infinit.
Puntea de directive trebuie sa asigurare cinematica corecta si o buna stabilitate a rotilor de directie,
manevrararea usoara a volanului, socurilor reduse la volan si uzuri reduse ale pneurilor.
Constructia puntii, mai ales in zona fuzetei si a butucului rotii, este influentata si de tipul mecanismului
de franare folosit, respectiv mecanism cu disc si placheti sau mecanism cu tamburi si saboti interiori.
Puntea de directie asigura prin constructia sa valorile prescrise de proiectant pentru unghiul de inclinare
longitudinala al pivotului (unghiul de fuga), unghiul de inclinare transversala al pivotului si unghiul de cadere al
rotii, iar daca este cazul si posibilitati de reglare pentru aceste unghiuri. Din aceasta cauza o conditie specifica
impusa puntii de directie este sa asigurare cinematica corecta si o buna stabilitate a rotilor de directie, pe fondul
unei manevrari usoare a automobilului si unei uzuri reduse a pneurilor.
Puntea trebuie riguros corelata cu elementele suspensiei. Exista in acest sens incompatibilitati ca: nu se
poate folosi la o punte rigida un arc bara de torsiune; nu se poate folosi la o punte fractionata cu mecanism
patrulater transversal un arc lamelar dispus longitudinal. In plus pe punte trebuie sa existe elemente (suporti,
grinzi etc.) care sa permita montarea arcurilor, a amortizoarelor, a tampoanelor limitatoare de cursa si a barelor
stabilizatoare.
Constructia puntii, indeosibi in zona fuzetei si a butucului rotii, este influentata si de tipul mecanismului
de franare folosit, respectiv mecanism cu disc si placheti sau mecanism cu tamburi si saboti interiori.
Suspensia automobilului se realizeaza in esenta prin dispunerea intre corpul automobilului si roti a
elementelor elastice (arcurile) si a amortizoarelor. Masele suprapuse suspensiei formeaza masa suspendata, iar
cele montate sub suspensie formeaza masa nesuspendata. Pentru asigurarea unui confort sporit este necesar ca
masa nesuspendata sa fie cat mai mica. Puntile fractionate au o masa nesuspendata mai mica decat puntile
rigide.
Din cele prezentate rezulta ca, puntile si suspensiile automobilului desi indeplinesc functiuni cu totul
diferite, datorita cerintelor numeroase si exigente pentru asigurarea stabilitatii si a confortului in conditiile
maselor si a dimensiunilor de gabarit reduse, sunt tratate si realizate constructiv in cadrul unor ansambluri
unice, ale caror functiuni sunt in esenta urmatoarele:
transmiterea greutatii automobilului la roti;
transmiterea fortelor si momentelor de reactiune de la roti la cadru sau caroserie;
limitarea solicitarilor dinamice transmise de la roti la cadru sau caroserie;
realizarea unui confort cat mai ridicat pentru calatori si marfurile transportate;
asigurarea contactului continuu si constant intre roti si cale;
ghidarea precisa a miscarii rotilor in raport cu sasiul sau caroseria, in timpul dezbaterii suspensiei;
asigurarea stabilitatii pe traiectorie;
asigurarea echilibrului automobilului in diverse conditii de deplasare.
�2. Sistem RENAULT de montare si de ghidare a puntii motoare spate cu doua perne de aer.
In figura 2.9 se prezinta sistemul de montare si de ghidare cu semilamela parabolica de sustinere si
lamela elastica parabolica folosit de RENAULT. Suspensia puntii are doua amortizoare montate in fata puntii si
inclinate spre fata precum si bara stabilizatoare.
Constructia este de tipul punte rigida trasa prin doua brate longitudinale fixate pe grinda puntii si
articulate in fata de longeroane.
Semilamele parabolice au rol de elemente elastice, astfel ca suspensia poate fi considerata mixta, adica
cu elemente elastice din metal si cu elemente pneumatice. Semilamelele parabolice suport sunt articulate la
capatul din fata de suporti fixati pe longeroane, sustin in partea centrala puntea dispusa deasupra lamelelor
printr-un sistem de bride, iar prin capatul din spate cu lungime mica sustin elementul elastic pneumatic.
Suportul superior al pernei de aer se monteaza pe o flansa fixata pe longeron. Pe partea inferioara a
longeronului, in zona trompei carterului se monteaza un suport cu un tampon limitator de cursa. Reactiunile
transversale sunt preluate de semilamele, iar momentele de reactie solicita suplimentar pernele de aer cu forte
verticale.
Solutia se foloseste la autocamioane mici si mijlocii si poate avea diferite variante in functie de
configuratia lamelei suport pentru elementul pneumatic si de configuratia lamelei elastice.
�3. Centrul de ruliu pentru puntea rigida cu arcuri lametare longitudinale.
[Link] de ruliu pentru puntea rigida cu arcuri lametare longitudinale: a)arcurile montate deasupra
grinzii puntii; b)arcurile montate sub grinda puntii; c)arcurile montate deasupra grinzii puntii si bara Panhard.
Centrul de ruliu pentru cazurile a si b se obtine unind mijloacele segmentelor definite de ochiurile
arcurilor de pe stanga si de pe dreapta si intersectand dreapta astfel obtinuta cu planul median de simetrie.
In cazul c centrul de ruliu se gaseste la intersectia barei Panhard cu planul median al automobilului,
indiferent de pozitionarea barei fata de punte, si nu la mijlocul barei asa cum se considera uneori.
�4. Elemente de calcul pt puntea McPherson, sa se determine fortele din tija amortizorului.
Particularitatea constructiva a acestei punti este aceea ca fortele se transmit atat prin intermediul bratului
transversal, cat si prin intermediul amortizorului, care face parte atat din mecanismul de ghidare al rotii cat si
din suspensie.
Fig.6..[Link] de calcul pentru puntea McPherson cu axa amortizorului suprapusa peste axa de
bracare
Schema puntii MacPherson cu axa amortizorului suprapusa peste axa de bracare a rotii (axa pivotilor) este
prezentata in figura 6.10. Mecanismului puntii i se asociaza un sistem de referinta xOy ale carei axe sunt:
- axa Oy este axa paralela cu axa amortizorului;
- axa Ox este perpendiculara pe axa Oy.
�Se constata ca sistemul este rotit cu unghiul de inclinare transversala al pivotului fata de sistemul de
referinta al automobilului. Pivotul inferior este articulatia sferica dintre corpul fuzetei si amortizor, considerat ca
facand parte din corpul amortizorului.
Reactiunea normala la roata Z da nastere unei forte B in bratul transversal si unei forte A in articulatia
dintre tija amortizorului si caroserie, forte care sunt reprezentate prin componentele lor fata de sistemul de
referinta ales, adica: Bx si By, respectiv Ax si Ay.
Componenta Ax se determina din ecuatia de momente fata de pivotul sferic, adica:
2 Z Gns b
G
(6.48)
Ax C o Z ns b Ax
2
2 C o
unde: Gns este greutatea nesuspendata pe punte;
b = dt + d tg este o constanta constructiva pentru punte;
C +o este o distanta variabila functie de dezbaterea rotii; se considera cazul automobilului incarcat cu
sarcina nominala.
Prin descompunerea reactiunii normale la roata se obtin urmatoarele componente:
G
G
(6.49)
Z x Z ns sin si Z y Z ns cos
2
2
Componenta Bx din pivotul sferic se determina din ecuatia de echilibru a fortelor pe Ox:
G b
Bx Z ns
sin
2 C o
Componenta By din pivotul sferic se determina cu relatia:
By Bx tg
(6.50)
(6.51)
Din ecuatia de echilibru a fortelor pe Oy se determina componenta Ay:
G b
(6.52)
Ay Z y B y Z ns
sin cos tg Fa
2 C o
Ea este tocmai forta din arcul suspensiei, adica forta pe care o transmite arcul articulatiei superioare elastice
oscilante.
Specific puntii MacPherson este determinarea fortelor taietoare care apar in ghidajul tijei amortizorului
si in pistonul sau, precum si momentul incovoietor din tija amortizorului. Ele se determina din ecuatiile de
echilibru ale tijei amortizorului, cu relatiile:
l
, K x C x Ax , M it Ax o
(6.53)
C x Ax
l o
Fortele rezultante din cele doua articulatii se determina cu relatiile:
A Ax2 Ay2 si
B Bx2 B y2
(6.54)
�5. Caracteristica de amortizare.
Caracteristica de amortizare reprezinta dependenta dintre forta de rezistenta a amortizorului Fa si viteza de
deplasare a pistonului vp (viteza relativa pe verticala a rotii fata de caroserie) in cilindrul amortizorului. Ea este
definita de relatia:
(7.12)
Fa c v ip
unde: c este coeficientul de rezistenta al amortizorului;
i este exponentul vitezei (0<i<2).
Valoarea exponentului i depinde de dimensiunile orificiilor calibrate, constructia supapelor si
viscozitatea lichidului. In functie de exponentul i caracteristica de amortizare, prezentata ca alura in figura 7.30,
poate fi:
- liniara daca i=1 (dreapta 1);
- progresiva daca i>1 (curba 2);
- regresiva daca i<1 (curba 3).
Puterea disipata este suprafata de sub caracteristica.
[Link] de caracteristici de amortizare
Caracteristica progresiva prezinta avantajul ca fortele de rezistenta sunt mici la viteze reduse ale rotii
in raport cu caroseria (deplasarea automobilului cu viteza redusa, drumul are neregularitati lungi cu contururi
line) si cresc rapid odata cu cresterea vitezei oscilatiilor.
Caracteristica regresiva are avantajul ca valoarea fortelor rezistente la viteze mari ale oscilatiilor este
mai redusa, deci fortele care se transmit caroseriei sunt mai mici.
Caracteristica optima este cea parabolica (i=2).
Pentru a reduce valoarea fortelor care se transmit caroseriei prin amortizor in cazul caracteristicii
progresive, acesta este prevazut cu supape de descarcare, care se deschid cand viteza relativa a oscilatiilor
�devine prea mare, sectiunile de trecere pentru lichid se maresc, iar forta de amortizare creste mai lent. Supapele
de descarcare sunt necesare si un cazul functionarii amortizorului la temperaturi scazute, cand vascozitatea
lichidului creste sau in cazul socurilor bruste. Viteza pistonului la care supapele de descarcare se deschid se
numeste viteza critica, vcr, cu valori cuprinse in intervalul 0,15...0,50 m/s.
Coeficientul de rezistenta al amortizorului are valori diferite pentru cursa de comprimare si pentru cursa
de destindere, iar caracteristica de amortizare este asimetrica. La amortizoarele actuale intre coeficientii de
rezistenta pe cele doua curse exista relatia:
(7.13)
cd 2....5 cc
Diferenta dintre coeficientii cd si cc depinde de neregularitatile drumului. Cu cat suprafata drumului prezinta
mai multe neregularitati, cu atat diferenta dintre cei doi coeficienti trebuie sa fie mai mare, deoarece la trecerea
rotii peste o denivelare proeminenta viteza masei nesuspendate creste , iar prin amortizor se transmite o forta
mare care ocoleste elementul elastic al suspensiei. Aceasta forta poate fi redusa prin micsorarea coeficientului
cc.
Cand roata trece peste adancituri, iar automobilul se deplaseaza cu viteze mari, roata poate pierde
contactul cu drumul deoarece componenta orizontala a vitezei este mult mai mare fata de componenta verticala,
in consecinta cd nu trebuie sa fie prea mare.
Se recomanda ca la deplasarea pe drumuri cu suprafete denivelate, diferenta dintre cd si cc sa fie mare,
iar la deplasarea pe drumuri cu denivelari lungi si line diferenta sa fie mica.
Coeficientul mediu de rezistenta al amortizorului este:
c c
(7.14)
c c d
2
�6. Sa recunoastem figura
[Link] sistemului de directie cu mecanism de actionare cu melc si rola integrat si patrulater
central: 1-portfuzeta; 2-fuzeta; 3-levierele fuzetelor; 4-bieleta dreapta; 5-levierul din dreapta al patrulaterului
central; 6-levierul de comanda; 7-mecanismul de actionare; 8-bara transversala de directie (bara de conexiune);
9-bieleta din stanga.
In cazul automobilelor cu puntea din fata fractionata cu suspensie independenta, bara transversala este
fractionata in doua sau chiar trei parti, iar rolul trapezului de directie este preluat de doua sau chiar trei
mecanisme cu bare dispuse transversal intre roti.
In figura 1.8 este prezentata constructia sistemului de directie pentru o punte fractionata, cu mecanismul
de actionare integrat in transmisia directiei (levierul de comanda cu arborele sau formeaza latura din stanga a
patrulaterului central) si cu transmisia directiei cu patrulater central.
Dispunerea patrulaterului central in fata sau in spatele axei rotilor depinde de solutia de organizare
adoptata pentru zona din fata a automobilului.
Daca se deplaseaza spre centru levierele laterale ale patrulaterului central pana la suprapunerea lor in
planul median al automobilului, se obtine transmisia directiei cu levier central simetric, pentru o punte rigida,
dar se poate folosi si pentru puntea fractionata. Integrarea mecanismului de actionare, astfel incat levierul de
comanda este chiar levierul central simplifica transmisia de forta a directiei. Se complica constructia transmisiei
de comanda, dar se creaza posibilitatea dispunerii mecanismelor care permit reglarea pozitiei volanului dupa
doua directii.
�7. Randamentele sistemului de directie.
Randamentul mecanismului de actionare difera in functie de sensul de transmitere, deosebind randamentul
direct de la volan la levierul de comanda d si randamentul invers de la levierul de comanda spre volan i .
[Link] mecanismului de actionare pentru determinarea randamentelor
Considerand schema din figura 1.42, randanentul direct al mecanismului de actionare se poate exprima
cu relatia:
P Pf
Pf
M f 1 1 M f 2 2
M f 1 ia M f 2
d 1
1
1
1
(1.10)
P1
P1
M 1 1
M 1 ia
unde Mf1 si Mf2 sunt momentele de frecare de la elementul conducator, respectiv elementul condus al
mecanismului de actionare; ia este raportul de transmitere al mecanismului de actionare, M1 este momentul
exterior dezvoltat la arborele volanului.
Un rationament analog se aplica si pentru randamentul invers si se obtine:
P Pf
Pf
M f 1 1 M f 2 2
M f 1 ia M f 2
(1.11)
i 2
1
1
1
P2
P2
M 2 2
M2
unde M2 este momentul exterior aplicat arborelui levierului de comanda.
Din analiza relatiilor (1.10) si (1.11) se observa ca frecarea in lagarele elementului conducator are o
influenta mai mare decat frecarea in arborele levierului de actionare (primul se amplifica cu ia) si intotdeauna
randamentul direct este mai mare decat randamentul invers (diferenta este cu atat mai mare cu cat i a este mai
mare).Pentru ca socurile la volan sa se simta cat mai putin este necesar ca randamentul invers sa fie cat mai mic
(socurile nu se simt la volan daca mecanismul de actionare este ireversibil), dar mecanismul de actionare trebuie
sa permita revenirea automata a volanului la pozitia corespunzatoare mersului rectiliniu dupa incetarea
comenzii de virare (directia se stabilizeaza).
Pentru asigurarea unei conduceri usoare trebuie ca forta dezvoltata de sofer la volan sa nu depaseasca
4050 N la autoturisme, 100160 N la autocamioane si autobuze, la autocamioane se accepta o forta maxima
la volan de 250 N. Se recomanda ca pentru forte mai mari de 200 N sa se foloseasca servomecanisme de
directie, dar este tendinta ca si la autoturisme de clasa mica sa se foloseasca servodirectii.
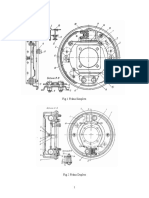
�8. Dispozitive de reglare automata continua a jocului dintre saboti si tambur.
[Link] de reglare automata continua a jocului dintre saboti si tambur: a)cu frictiune pe sabot: 1bolt fixat pe taler; 2-bucsa cu guler; 3-saibe de frictiune; 4-inima sabotului; 5-piulita; 6-arc elicoidal; -jocul
prescris; b)cu frictiune in cilindrul receptor: 5-segment elastic; 6-piston; 7-cilindru receptor; -jocul prescris.
In cazul dispozitivului din figura 2.12.a se foloseste boltul 1 fixat pe talerul franei si montat cu jocul
in interiorul bucsei 2. Aceasta impreuna cu celelalte componente ale dispozitivului este montata pe inima 4 a
sabotului intr-o gaura eliptica cu dimensiuni mai mari decat diametrul exterior al bucsei. Jocul de montaj
reprezinta tocmai jocul normal dintre tambur si sabot. Inima sabotului este stransa intre saibele de frictiune 3 cu
piulita 5 si arcul elicoidal 6. Forta de frecare care ia nastere intre inima sabotului si saibele de frictiune este mai
mare decat forta arcului de readucere a sabotului. In cazul in care jocul dintre tambur si sabot va depasi
marimea jocului , la franare, dupa ce bucsa sa va rezema de bolt, sabotul se va deplasa in continuare sub
actiunea fortei de actionare care invinge fortele de frecare. Dupa franare, arcul de readucere departeaza sabotul
de tambur numai cu jocul , deoarece nu poate invinge forta de frecare interna a dispozitivului.
Dispozitivul din figura 2.12.b este montat in interiorul cilindrului receptor si consta din segmentul 5 care
apasa puternic pe alezajul cilindrului si este montat cu jocul in canalul din piston. Forta de frecare dintre
cilindru si segment este mai mare decat forta arcului de readucere a sabotului, iar functionarea este
asemanatoare cu aceea din cazul precedent.
�9. Momentul de franare pt frana disc tip deschis.
Momentul de franare se determina folosind schema din figura 2.18.
[Link] de calcul pentru frana disc de tip deschis
Forta normala pe elementul de arie dA=dd este dN=pdA, forta de frecare este dF f =dN,
momentul de frecare elementar in raport cu centrul O va fi dMf=dFf , iar momentul total de frecare
pentru nf perechi de suprafete de frecare si distributie uniforma a presiunii va fi:
re
ri
M f pn f dd pn f d 2 d
2
2
p re3 ri3 n f
3
(2.33)
Daca se inlocuieste p=N/A=N/[(re2-ri2)], expresia momentului de franare devine:
3
3
2 N n f re ri
Mf
N rm n f
2
2
3
re ri
unde s-a notat
2 re3 ri3
rm 2 2
3 re ri
(2.34)
In practica pentru calculul razei medii se utilizeaza relatia mai simpla rm = (re + ri)/2, eroarea de
calcul nedepasind 4%.
Pentru constructiile uzuale se recomanda ri / re = o,6.0,75 si
2 = 45.500 .
Forta normala N se determina din conditia de echilibru a garniturii de frictiune, in functie de
valoarea fortei de actionare a pistonului.
S
(2.35)
S N , N 0 N
1 ,
unde este coeficientul de frecare dintre disc si garnitura; este coeficientul de frecare dintre partea
metalica a placutei si elementele de ghidare ale placutei ( = 0,05.0,1).