Documente Academic
Documente Profesional
Documente Cultură
Licenta Modernizarea Tramvaielor RATB Cu Invertoare Trifazate Si Motare de Tractiune Asincrone
Încărcat de
Baban VladTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Licenta Modernizarea Tramvaielor RATB Cu Invertoare Trifazate Si Motare de Tractiune Asincrone
Încărcat de
Baban VladDrepturi de autor:
Formate disponibile
1
Modernizarea acionrii tramvaiului tip
RATB cu invertor trifazat i motor de
traciune asincron
ndrumtor: Prof. Dr inginer Valentin NVRPESCU
Absolvent: Vlad BABAN
2
Cuprins
Abstract ............................................................................................................................ 5
1. Introducere .............................................................................................................. 6
2. Prezentarea tramvaiului clasic ............................................................................ 10
2.1 Tramvaiul clasic V3A .......................................................................................... 10
2.2 Tramvaiul cu podeaua joas (V3A-93CA) ........................................................ 14
2.3 Utilizarea supercapacitorilor n traciunea electric ....................................... 19
2.4 Modificarea boghiului pentru acionarea cu motor asincron ......................... 19
3. Motorul asincron de traciune ............................................................................. 22
3.1 Prezentare general ............................................................................................. 22
3.2. Modelul matematic al motorului asincron ....................................................... 23
3.3 Principiul orientrii dup cmp al mainii de inducie ................................... 27
4. Invertorul trifazat. Tehnici PWM (MID) utilizate n comanda intertoarelor 30
4.1 Prezentare general ............................................................................................. 30
4.2 Tehnici PWM ....................................................................................................... 32
3
4.3 Dispozitivele de comutatie .................................................................................. 35
4.4 Sistemul de acionare a tramvaielor modernizate ........................................... 38
4.5 Modelarea pe calculator a invertorului trifazat ............................................... 40
5. Proiectarea echipamentului de acionare a tramvaiului cu invertor trifazat . 43
5.1 Parametri generali ............................................................................................... 43
5.2. Calculul mrimilor caracteristice: .................................................................... 47
5.3 Consideraii privind pierderile n elementele complet comandate: ................ 51
5.4. Verificarea elementelor semiconductoare, la nclzire ................................... 54
5.5. Dimensionarea filtrului din circuitul intermediar ........................................... 59
6. Concluzii ................................................................................................................ 62
Anexa 1: Schema general ............................................................................................ 64
Anexa 2: Schem invertor ............................................................................................. 65
Anexa 3: Gabarit sistem cu invertoare ........................................................................ 66
Bibliografie ..................................................................................................................... 67
4
5
Abstract
n aceast lucrare se studiaz motivele, avantajele i dezavantajele implementrii metroului
uor n Bucureti,(precum si alte proiecte de dezvoltare a transportului urban) prin focalizarea, n
particular, pe studiul tramvaiului RATB folosit n metroul uor n Bucureti, i prin descrierea
performanelor atinse de cteva din componentele sale, anume de motorul asincron de traciune,
de boghiu, i n mod special, de invertorul trifazat.
Lucrarea este constituit din ase capitole (introducere, patru capitole de studiu asupra
subiectului propus, un capitol de concluzii). Primul capitol, introducerea, prezint n linii mari
problemele transportului urban. Al doilea capitol privete pe scurt la istoricul i tendinele n
dezvoltarea construciei tramvaielor i a metroului uor.
Capitolele trei i patru studiaz motorul asincron i invertorul de tensiune (principii de
funcionare, modelare matematic, metode de reglare i control, simularea funcionrii pe
calculator). Capitolul cinci folosete datele avute la dispoziie prin cooperare cu SAERP i UMEB
pentru a proiecta un invertor de tensiune cu datele de intrare identice cu cele alte invertorului
trifazat folosit n tramvaiele modernizate. Concluziile arat contribuia studiului de fa i
observaiile generale asupra funcionrii invertorului trifazat n sistemele de acionare ale
tramvaielor moderne.
6
1. Introducere
Dezvoltarea marilor orae din Romnia, n special a Bucuretiului, a dus la un trafic foarte intens
n timpul orelor de vrf, care atrage dup sine poluarea prin emisii gazoase i poluarea sonor
(poluarea sonor a atins n anul 2007 nivelul de 62.8 dB, iar emisiile de noxe au atins cifre ridicate
i ele: 2t NO2 ,10t CO,1.2t de carburant nears de 357t SO2, 1113tCO2). n acest context s-a impus
dezvoltarea transportului n comun bazat vehiculele cu motoare electrice i, n mod special, al
transportului de tip cale ferat (tramvai, metrou uor) care are traseu dedicat, uor de meninut n
stare degajat prin elemente de construcie i prin legislaie.
n prezent, regia RATB folosete n Bucureti o reea de linii de tramvai de aproximativ
300 km lungime i deine 500 tramvaie, la care se adaug 18 linii de troleibuz cu o reea de 485 de
km de reea, 3 linii de tramvai uor, 1300 de autobuze i trasee rutiere de 2900 km. La orele de
trafic de vrf tramvaiele i troleibuzele merg cu o viteza redus 8...10 km /h, iar n rest se
7
deplaseaz cu o vitez de 10...14 km/h, printre avantajele acestui tip de transport numrndu-se
confortul i capacitatea de transport, frecvena, traseul precis, lipsa de poluare.
Este evident c din punct de vedere al mediului, folosirea mai multor vehicule electrice ar
fi soluia cea mai bun pentru transportul urban, iar pentru fluidizarea transportului metroul uor,
cu traseu ferit de pasaje i intersecii rutiere este, de asemenea, de dorit, deoarece timpii de
deplasare sunt redui considerabil, iar vitezele sunt evident mai mari.
n particular, metroul uor este de fapt o linie de tramvai care este separat de infrastuctura
rutier i reprezint un tip de transport urban rapid ntr-o form intermediar ntre sistemul
feroviar urban (metrou) i calea ferat tradiional.
Conform Masterplan-ului [3] municipal, obiectivele ce trebuie luate n considerare pentru
dezvoltarea unui transport urban eficient, pn n anul 2027, n Bucuresti, vor trebui s aib ca
scop ndeplinirea obiectivelor strategice i a angajamentelor asumate de conducerea capitalei.
Aceste obiective trebuie s includ a. combaterea efectelor schimbrilor climatice (emisiile de
CO2 din sectorul de transport s fie reduse cu 30%); b. asigurarea unei structuri de transport
urban bine ramificate (creterea populatiei i a locurilor de munc n sectoarele, cartierele, i
zonele cu un grad ridicat de accesibilitate i de calitate a transportului public, promovarea altor
mijloace alternative de deplasare, nepoluante, cum sunt folosirea bicicletei, a deplasrii pietonale
etc.): c. Impact pozitiv asupra mediului (standarde privind nivelul de zgomot s fie stabilite n
planul de reducere a zgomotului); d. Creterea calitii vieii (reducerea numrului de mori i de
rnii n accidente rutiere, la jumtate; mersul zilnic pe jos i cu bicicleta pentru mbuntirea
sntii populaiei; siguranta traficului s nu reprezinte un obstacol pentru mersul pe jos i cu
bicicleta; populatia pe diferite grupuri de vrsta trebuie sa aib sanse egale n privina accesului
la sistemul de transport). O masur important pentru implementarea acestui plan, este
construcia unei linii duble de tramvai n jurul Bucuretiului care sa asigure o frecven de 4-6
tramvaie pe or, care s reduc transportul cu autoturisme i s fac legtura ntre toate
sectoarele i sistemul feroviar naional.
8
Fig. 1.1 Viitoarea linie de de metrou usor n jurul Bucuretiului (P-1, P-2, P-3 sunt
principalele staii funcionale n 2015-2020).
In prezent, sistemul feroviar care se doreste a fi utilizat, nu a mai fost folosit timp de 10 ani
iar unele portiuni chiar timp de 20 de ani. Acesta trebuie sa fie modernizat i echipat cu o linie
electrica de alimentare de 25 kV 50 Hz. n Fig. 1.2 se poate observa ca viteza atins de metroul
usor este apropiat de viteza metrolui.
9
Cand s-a dezvoltat Metroul uor pe linia 41 a fost nevoie de urmtoarele msuri:
- achiziia a 2 sau 3 vagoane motor care au un sistem de comand pe trei nivele.
- asigurarea unei linii de tramvai protejat n proporie 95% i dotat cu cu staii
modernizate.
- asigurarea de bariere automate la interseciile mari care s restricioneze circulaia
mainilor.
Cu experiena dobandit dupa realizarea acestui proiect pe linia 41 se doreste ca n
urmtorii 5 ani liniiile de tramvai 8, 35, 11, 5 sa fie dezvoltate i ele n linii de metrou uor, iar
pn n 2015 se planific extinderea reelei ferate la o lungime total de 100 de km.
10
2. Prezentarea tramvaiului clasic
Capitolul doi al lucrrii de fa se ocup de prezentarea tramvaiului clasic a crui
modernizare se realizeaz n RATB prin adoptarea unor modificri mecanice i electrice, care
includ modificarea mecanic pentru podeaua cobort, folosirea motorului asincron i a
invertoarelor trifazate.
2.1 Tramvaiul clasic V3A
Primul tramvai romnesc dublu-articulat - V3A-ul - a fost construit de Uzina de Reparaii
,,Atelierele Centrale" (URAC) n anul 1973, avnd la baz un vagon LHB livrat pe comand. Au
fost construite pn n 1990 pentru Bucureti, Braov, Brila, Cluj-Napoca, Constana (modelul
V3A-C, pentru tensiunea de 825 V c.c.), Oradea, Ploieti, iar din 1991 i pentru Botoani.
11
2.1.1 Istoricul modernizrii
Primul proiect de modernizare a parcului de tramvaie de dup 1989 prevedea modernizarea
vagoanelor V3A (produse la URAC ntre 1973 i 1990). Astfel, prin modificarea proiectului
iniial, a fost construit, n anul 1993 primul V3A-93 la URAC, ce a nlocuit vechiul V3A,
prelundu-i i numrul de inventar. ntre anii 2004 i 2006 au fost construite i 4 V3A-93 cu
seciunea C modificat pentru a fi accesibil persoanelor cu handicap locomotor. Ultimul V3A-
93 a fost construit n anul 2007. Toate tramvaiele V2A, V2A-2S, V3A i V3A-2S (mai puin
#205) sunt echipate cu cte dou motoare de curent continuu, cu excitaie serie, cu puterea
nominal de 120 kW fiecare.
n 1995, s-a trimis la Electroputere Craiova documentaia pentru modelul V3A-93,
rezultnd tramvaiele cu numerele de inventar #358 i #359. Cum URACul nu mai fcea fa, tot
n 1995 a fost nceput o colaborare cu firma Faur S.A., productor consacrat de vehicule
feroviare, n urma creia au rezultat 52 de tramvaie (ntre anii 1995 i 2004), ncadrate ca V3A-
93M i rezultate prin modificarea proiectului V3A-93 de ctre Firma Faur.
ntre 1997 i 2000 i Electroputere Craiova a livrat 13 tramvaie ctre RATB, toate avnd la
baz modelul V3A-93M, ns cu modificri la partea de design. Experimental, primele 3
tramvaie livrate au fost nzestrate cu variatoare de tensiune continu produse de firma Hollec din
Olanda, fiind primele tramvaie ce permiteau i frnare recuperativ din dotarea RATB. Au fost
denumite V3A-H. Celelalte 10 tramvaie sunt de tip V3A-93M i au fost nzestrate cu sistemul
clasic de acionare (reostatic), mai puin vagonul #246 pe care s-a experimentat un alt model de
variator de tensiune, dovedit nefiabil n timp (ulterior vagonul a fost modificat pentru acionare
resotatic).
n vederea continurii modernizrii parcului, n 2006 a fost construit primul V3A-93-CH-
PPC (CH = chopper, PPC = podea parial cobort). Pe lng designul modificat i prezena
podelei coborte n seciunea C, vagoanele de acest tip constituie prima serie mare de tramvaie
echipate cu ,,chopper" (variator de tesniune continu). ncepnd cu 2006 au fost nlcouite
ultimele tramvaie V3A rmase cu V3A-93-CH-PPC, apoi s-a trecut la casarea V2A-urilor i
12
nlocuirea lor tot cu V3A-93-CH-PPC, n vedere creterii capacitii de transport i a reducerii
costurilor de funcionare.
n anul 2008, ca urmare a scadenei la reparaie capital a vagonului V3A-H #205 i pe
fondul lipsei de piese pentru echipamentele acestuia, s-a luat hotrrea nlocuirii complete a
motoarelor i echipamentelor de acionare. Astfel, vagonul a fost dotat cu dou motoare
asincrone trifazate de curent alternativ, cu o putere nominal de 240 kW fiecare i cu invertor
(reeaua de alimentare furnizeaz curent continuu), ce servete i ca variator de tensiune pentru
reglarea turaiei motoarelor, acesta aparine Depoului Alexandria i circul exclusiv pe linia 41.
2.1.2 Date tehnice pentru tramvaiul V3A-93:
Ecartament: 1435 mm
Raport de transmitere reductor: 1: 5,66 mm
Formula osiilor: B22B
Lungimea vagonului: 27180 mm
Limea vagonului: 2390 mm
nlimea vagonului (cu pantograful cobort): 4200 mm
Ampatamentul boghiului: 1800 mm
Diametrul roii: n stare nou 700 mm; uzat: 636 mm
Masa vagonului gol: 35 t (~ 40 t pentru versiunea Electroputere Craiova)
Masa vagonului ncrcat: 55 t (~ 60 t pentru versiunea Electroputere Craiova)
Numr de ui: 5 (ui IFE, cu excepia vagoanelor #277 i #347, ce sunt echipate cu ui
Hannover)
Locuri pe scaune: 34
13
Numr total de cltori la 6,5 cl/m2: 249
Numr total de cltori la 8 cl/m2: 300
Raza minim de nscriere n curb: 18 m
Aliniament obligatoriu n curbe S cu raza de 18m (minim): 7 m
Raza curbei S fr aliniament (minim): 30 m
Raza minim la mersul pe cocoa: 800 m
Raza minim la mersul n covat: 800 m
Tensiunea de alimentare: 750 V c.c.
Tipul motorului: TE 022 H
Putere uniorar specific: 0,87 kW/kN
Puterea nominal a motoarelor: 2 * 120 kW
Consum specific fr nclzire: 8 Wh/kN/km
Viteza maxim: 55 km/h
Acceleraie demaraj: 0,8 m/s2
Ramp maxim: 6 %
Acionare: Reostatic (controller i rezistene de demaraj i frnare)
Sisteme de frnare:
-frn de serviciu: electrodinamic + solenoid de frn la boghiul purttor 2
-frn de urgen: cu patin la in
14
-frn de staionare: dispozitive acionare cu resort electric sau electrohidraulic
Convertizor static:
- c.c.: 30 V, 120 A
- c.a.: 3 x 380 V, 50 Hz, 6 kVA
Baterii: 24 V, 205 Ah
2.2 Tramvaiul cu podeaua joas (V3A-93CA)
Prin aplicarea acestei tehnologii se mbuntete comfortul pasagerilor i se sporete eficiena
operaiunilor de transport public. Fa de tramvaiele clasice, tramvaiele cele cu podea joas au
influenat pozitiv creterea fluxului de pasageri, (nivelul acesteia fiind la cca 350 mm deasupra
sinei), a redus timpul petrecut n staii, asigurand un proces mai rapid de mbarcare/debarcare, i de
asemenea, acestea ncurajeaz utilizarea acestui tip de transport n comun de ctre persoanele cu
probleme locomotorii. .
Aceste caracteristici au determinat formarea unei noi tipuri de cereri privind mobilitatea
cltorilor, ceea ce a determinat ca productorii s reevalueze tehnologia, de la realizarea
boghiurilor, pn la stabilirea locaiei acestora, n aa fel nct tramvaiele s fie performante i
capabile s suporte o greutate n plus , deoarece echipamentele electrice sunt relocate pe acoperiul
vehiculului.
n cazul tramvaielor standard, conform conceptului (6 osii cu 3 vagoane) boghiurile sunt
sunt localizate central sub fiecare corp de caroserie, iar motoarele de traciune sunt situate n
caroserie pentru mai mult spaiu n boghiuri. n combinaie cu roile relativ mai mari i cu un
sistem hidraulic sofisticat de stabilizare mecanic, aceste tramvaie au artat o performan
rezonabil, dar au necesitat o infrastructur special.
15
Fig. Tramvai tip V3A-93CA modernizat cu traciune motor asincron
Dup realizarea cu succes a acionrii cu motor asincron la troleibuze (2 troleibuze
Astrabus- Citelis aflate n circulaie n Bucuresti de 2 ani) ICPE SAERP SA a realizat mpreun cu
RATB-UR primul tramvai acionat cu motoare asincrone din Romnia. Solutia aleasa implica 2
invertoare de frecven i 2 boghiuri motoare, tehnica de reglare fiind controlul numeric cu
orientare dup cmpul rotoric al masinilor asincrone (FOC).
Echipamentele de traciune sunt proiectate ntr-o structur compact, n tehnica IGBT, iar
controlul acestora se face exclusiv printr-o serie de microcontrolere (DSP) de ultim generaie,
interconectate prin interfa serial de tip RS485 i CAN.
Capacitile de diagnoz ale sistemului sunt foarte dezvoltate, fiind prezente la nivelul
vatmanului printr-un afiaj interactiv, iar pentru personalul de service prin semnalizri vizuale i /
sau alfanumerice cu coduri de stare, sau prin interogarea sistemului cu PC-ul (laptop) avnd
instalat soft-ul de diagnoz DC-Soft dezvoltat de specialitii ICPE SAERP SA.
16
Funciile de memorare a parcursului permit analiza comportrii n exploatare a tramvaiului
i optimizarea traseului acestuia pentru creterea vitezei comerciale prin eliminarea opririlor
nejustificate pe linia de metrou uor.
Contorizarea energiei consumate i a energiei recuperate este folosit la optimizarea
traseului i la calculul diagramei de mers. Se constat un consum general mediu de 1,6 kWh /km
datorat consumului redus al sistemului de actionare i gradului mare de recuperare a energiei la
frnare (4246%).
Performanele dinamice realizate pe vehicul sunt extrem de bune, frnarea electric fiind
eficient pn la oprirea complet.
Tratarea antipatinrii este foarte precis realizat, fapt confirmat de uzura egal a roilor
motoare i purttoare.
2.2.1 Caracteristici
Design optimizat datorit tehnologiei IGBT.
Simplificarea cablajului prin transmiterea comenzilor invertoarelor prin conexiune
17
RS485.
Generarea pulsurilor de comand a invertorului local, n tehnica cu orientare dup
cmp, de catre unitatea de control MBB31.
Funcie de eliminare a patinrii la traciune i la frna electric
Frna electric regenerativ i reostatic
Comutarea traciune-frna i nainte-napoi fr aparate de comutaie.
Frana electric pn la viteza de 0 km/h
Comanda de schimbare macaz prin comanda chopperului de frana reostatic
2.2.2 Design
Control secvenial cu microprocesor
Antipatinare la traciune/frn
Frna de staie / pant
Limitarea curentului din linie
Regenerarea energiei n retea cu monitorizarea continua a capacitatii acesteia
Memorie de evenimente/defecte
Achiziia de date din funcionare / pentru diagnoza / pentru analiza defectelor prin
intermediul PC
Contorizarea energiei consumate / recuperate
Semnalizarea strilor vehiculului prin led-uri i afiaj alphanumeric cu 2 digii.
18
2.2.3 Dotarea cu 2 motoare trifazate asincrone
Motoarele asincrone din dotarea tramvaielor modernizate au urmtoarele caracteristici:
tractiune autoventilate
Tip MAB T10
Putere nominala 240 kW
Curent nominal 349 A
Tensiune nominala 500 V
Frecventa nominala 50 Hz
Turatie nominala 1486 rpm
Sursa auxiliara O sursa static n tehnologie Power MOS-Fet Tip SIF 28.180/750
Tensiune de intrare 750 Vcc (+20% - 30 %)
19
Tensiune de iesire 24 Vcc 180 A total, curent limitat pentru incarcare.
2.3 Utilizarea supercapacitorilor n traciunea electric
n traciunea electric au aprut n ultimul timp noi soluii pentru stocarea energiei electrice
utiliznd supercapacitori.
Supercapacitorii sunt un compromis ntre bateriile de acumulatori i capacitorii
convenionali. Desi bateriile de acumulatoare pot stoca energie mai mare, numrul de cicluri de
ncrcare-descrcare este mult mai mic dect al supercapacitorilor. Cele mai bune rezultate n
optimizarea consumurilor de energie se obtine prin folosirea n paralel a supercapacitorilor i a
altui rezervor de energie.
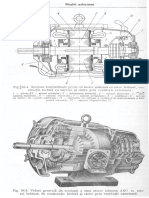
2.4 Modificarea boghiului pentru acionarea cu motor asincron
Un alt element de modernizare a tramvaiului cu podea joas este boghiul, un cuplu de patru roi
pe care este articulat asiul vagoanelor motor i al celor obinuite i le permite nscrierea n
curbe. Stabilitatea vagonului este strns legat de stabilitatea boghiului la micri longitudinale i
laterale. De exemplu, pentru boghiul CAF pentru vagoanele ASTRA, toleranele la aceste
deplasri sunt:
Tolerane laterale : Micare static maxim: 2 mm
Micare dinamic lateral maxim: 5 mm
Tolerane longitudinale (direcie de deplasare)
Micare maxim static: 1 mm
Micare dinamic lateral maxim: 4 mm
Aceste valori sunt strns legate de performanele motorului electric (de exemplu, tensiunea
de scurtcircuit, cupluri mecanice), precum i de caracteristicile diverselor legturi, prghii de
20
traciune i brae mecanice (cuplu de frnare; cuplu cubic sau de ncrcare; rigiditatea cuplajelor;
fore de traciune i sarcini de rupere etc.). n general, performanele acestor dispozitive
mecanice sunt proiectate ntr-o strns legtur ntre utilizator (ASTRA) i productor (CAF
Poland), multe date fiind confideniale. Mai jos se pot observa cteva scheme 3D ale boghiului
AFA-0-90-0475-001_Wheelset_CAF_gearbox.
21
22
3. Motorul asincron de traciune
3.1 Prezentare general
La ora actual, majoritatea acionrile electrice performante cu motoare asincrone au,ca surs de
alimentare, un ansamblu format dintr-un redresor cu diode, un element de filtrare (C sau L-C), i
un invertor PWM. Aceasta pentru c, n general, metodele evoluate de reglare a vitezei impun
modificarea simultan att a amplitudinii ct i a frecvenei tensiunii de alimentare.
n ultimii ani, invertorul a fost supus mai multor mbuntiri, datorit n principal
progreselor nregistrate de electronica de putere i de evoluia pozitiv a sistemelor de comand
numerice, ns, mai ales din considerente economice, redresorul folosit rmne necomandat
realizat cu diode. Principalele dezavantaje ale acestuia, aa dup cum este binecunoscut, sunt:
coninut ridicat de armonici n curentul absorbit din reeaua de alimentare i transfer
unidirecional de energie.
n afar de cele expuse, din cauza pierderilor, tensiunea maxim pe motor la ieirea
invertorului este mai mic dect tensiunea reelei de alimentare, la funcionarea n regim normal
P.W.M. Pentru meninerea tensiunii pe motor la valoarea nominal este necesar funcionarea
invertorului n zona de supramodulare (echivalent funcionrii cu ase pulsuri), ceea ce
determin prezena armonicilor de ordin mic n tensiunea aplicat motorului cu consecinele
negative cunoscute: nclzirea nfurrilor i cuplu dezvoltat oscilant.
Pentru eliminarea acestor neajunsuri, se poate folosi varianta unui redresor comandat, n
locul celui cu diode, cu modulaie n lime a pulsurilor. Acesta prezint urmtoarele avantaje:
- coninut redus de armonici;
- transfer bidirecional al energiei;
- funcioneaz n configuraie ridictor de tensiune, ceea ce minimizeaz funcionarea
invertorului n regim de supramodulare;
23
3.2. Modelul matematic al motorului asincron
Setul de ecuaii ce descrie relaia dintre mrimile electrice caracteristice mainii, cuplul
electromagnetic dezvoltat i legtura cu mrimile mecanice constituie modelul matematic
almotorului asincron.
Modelele cu parametrii concentrai se mpart n dou categorii de baz: modele n
coordonatele fazelor i modele utiliznd axe ortogonale.
Modelele ortogonale s-au dezvoltat mai nti ca modele fizice, apoi, mai trziu, prin
introducerea noiunii de fazor spaial reprezentativ. Modelele n fazori spaiali reprezentativi
sepot deduce fie direct din ecuaiile n coordonatele fazelor, fie din modelele ortogonale
prinnlocuirea a dou componente ortogonale printr-un fazor spaial. Pentru sistemele practice
dereglare este preferabil utilizarea unui model cu un numr ct mai mic de ecuaii, chiar
dacparametrii acestuia prezint unele variaii. n consecin vom prezenta n continuare
modelulmainii asincrone exprimat cu ajutorul fazorilor spaiali reprezentativi.
3.2.1. Ipoteze simplificatoare utilizate n scrierea modelului matematic
Prin definiie un model este o aproximare a realitii, deci el este dedus innd cont de
anumite ipoteze simplificatoare. n cazul mainii asincrone cu rotorul n scurtcircuit sunt
utilizate urmtoarele ipoteze:
- maina este nesaturat, permeabilitatea prilor constructive din fier fiind infinit;
- pierderile n fier sunt neglijabile;
- maina prezint perfect simetrie electric, magnetic i constructiv;
- sistemul tensiunilor de alimentare este trifazat sinusoidal simetric;
- se consider un ntrefier uniform;
24
- se consider o variaie spaial sinusoidal a cmpului magnetic din ntrefier (se
neglijeaz efectul armonicilor superioare);
- nfurarea de tip colivie a rotorului este nlocuit cu o nfurare echivalent trifazat,
cu acelai numr de spire i acelai factor de repartiie ca al nfurrii statorice;
- nfurrile statorice i rotorice sunt nlocuite cu nfurri echivalente concentrate;
- variabilele i parametrii nfurrii rotorice sunt raportaii la stator;
- neglijm efectul pelicular i variaia cu temperatura a parametrilor mainii;
3.2.2. Ecuaiile fazoriale ale mainii asincrone
n metodele de reglare vectorial a vitezei motoarelor asincrone ecuaiile mainii sunt scrise n
diverse sisteme de referin: statoric, legat de fluxul rotoric, legat de fluxul din ntrefier. Pentru a
permite o tratare unitar se considera un sistem (k) de referin arbitrar, mobil, ce face unghiul uk
cu axa statoric:
Notam cu Rs, LS i cu Rr, Lr parametrii carateristici celor trei nfurri statorice, respectiv
rotorice. Fiind vorba de nfurri diferite, rezistenele Rs, Rr i reactanele lor de scpri LS,
Lr, sunt diferite, n timp ce inductivitatea lor mutual Lm este aceeai.
25
Sintetic, setul complet de ecuaii al mainii asincrone, scris n reperul comun (k), rotitor cu
viteza unghiular k, este :
n care, Ls = LS + Lm reprezint inductivitatea total statoric, iar Lr = LS + Lm corespunde celei
rotorice, Lr , LS fiind inductivitile de dispersie.
n aceste ecuaii, dac se particularizeaz k se obine:
- setul de ecuaii n reper statoric pentru k =0
- setul de ecuatii n reper rotoric pentru k = P
De exemplu, ecuaiile generale ale mainii asincrone n reper statoric (s s) sunt :
Reperul mobil (k) se va orienta, n metodele de reglare a vitezei, n general dup unul din
fluxurile din main: rotoric, din ntrefier sau statoric.
26
3.2.3 Reglarea vitezei motoarelor asincrone
Motorul asincron trifazat are o caracteristic mecanic natural rigid. Viteza maxim, de
sincronism, este impus de frecvena tensiunii de alimentare a rotorului fr. Avnd n vedere doar
aceste aspecte putem s spunem c sistemele de reglare a turaiei pentru motoarele asincrone vor
fi cu mult mai complexe dect cele ale motoarelor de curent continuu.
Viteza motorului asincron poate fi modificat prin mai multe metode, cea mai eficient
fiind modificarea frecvenei tensiunii de alimentare. n acest caz este utilizat un convertor static
de frecven (un cicloconvertor sau un invertor de tensiune sau de curent). Pentru a pstra
nealterate performanele motorului (cuplu dezvoltat, curent maxim impus...) fluxul magnetic din
main trebuie s fie meninut, pe ct posibil, constant. Acest lucru impune i modificarea
amplitudinii tensiunii de alimentare n corelaie cu variaia frecvenei acesteia. Dac neglijm
cderile de tensiune pe rezistenele i impedanele de faz, legea de reglare poate fi scris
simplificat astfel:
Fiind cea mai eficient metod din categoria metodelor numite reglare scalar, metoda
U/f = const a devenit sinonim cu aceasta.
Utiliznd modelul fazorilor spaiali s-au dezvoltat metode noi de reglare dup cmp(sau
reglare vectorial) n care maina asincron este tratat similar cu o main de current continuu
cu excitaie separat. Principiul acestor metode const n a comanda fluxul prin main i cuplul
electromagnetic dezvoltat. Acest lucru este posibil prin descompunerea curentului statoric n
dou componente: una reactiv orientat dup vectorul flux generat i din care se regleaz fluxul
i alta activ, componenta ortogonal, din care se regleaz cuplul mainii. Cele dou componente
corespund, n mod analogic, curentului de excitaie respectiv curentului din indus de la maina de
c.c. cu excitaie separat.
27
3.3 Principiul orientrii dup cmp al mainii de inducie
Utiliznd modelul fazorilor spaiali s-au dezvoltat metode de reglare dup cmp (sau reglare
vectorial) n care maina asincron este tratat similar cu o main de curent continuu cu
excitaie separat.
3.3.1 Metoda reglrii dup cmp
Aceasta metod const n comanda fluxului din main i a cuplului electromagnetic
dezvoltat. Acest lucru se face prin descompunerea curentului statoric n doua componente: una
reactiv care este orientat dupa fazorul nvrtitor al fluxului i cu care se regleaz fluxul, i alta,
activ (componenta ortogonal) cu care se regleaz cuplul curentului. Cele doua componente
corespund analogic curentului de excitaie i curentului din indusul masinii de c.c..
Orientarea dup cmp a mainii const n defini poziia reperului comun k. Acesta poate
fi ales n trei moduri principale, cu axa d n direcia: fluxului rotoric, fluxului statoric sau a
fluxului din ntrefier.
3.3.2 Controlul vectorial indirect, cu orientare dup fluxul rotoric
Reglarea vectoriala indirecta presupune ca schema nu primete informaie despre fluxul din
rotor (msurat sau estimat). Blocul de comand va calcula poziia acestui vector cu formula:
Prin urmare, controlul vectorial indirect elimin traductoarele sau estimatoarele de flux dar
necesit o msurare foarte precis a poziiei rotorului n vederea determinrii ct mai exacte a
poziiei fazorului flux rotoric. Cum msurarea unghiului - u este fundamental, nu se recomand
determinarea acestuia prin integrarea vitezei obinut de la un tahogenerator.
Se recomand folosirea n sistem a unui encoder (sau similar) ceea ce duce la obinerea
28
unui rspuns bun n cuplu.
Acest tip de reglare are avantajul ca utilizeaz doar un singur traductor cel de vitez.
Dezavantajele metodei constau n lipsa unei bucle de reglare a fluxului i sensibilitatea ei la
variaia rezistenei rotorice. Modulul fluxului rotoric este impus de un generator de flux i este
constant i egal cu cel nominal pn la viteza nominal, dup care se trece la scderea sa.
O alt cerin a metodei este cunoaterea valorii corecte a constanteide timp rotorice Tr n
calculul alunecrii. Acest lucru constituie un dezavantaj al controlului indirect ntruct parametrii
rotorici se modific, R 'r cu temperatura i efectul pelicular iar L'r cu nivelul fluxului. Controlul
vectorial indirect poate fi realizat fie aplicndu-se comanda n curent fie comanda n tensiune .
Fig. Schem de control indirect dup fluxul rotoric a poziiei / vitezei unui motor de
inducie prin implementarea unui invertor de tensiune PWM comandat n curent
Controlul vectorial indirect al motorului din figura se face orientnd maina dup fluxul
rotoric. Pozitia rotorului u , obinut de encoderul E, se compar cu mrimea de referin - u*, iar
abaterea u*-u aplicndu-se la intrarea regulatorului de poziie de tip P.
La ieirea acestuia se obine valoarea impus pentru viteza relativ a ainii v*r care se
compar cu valoarea msurat r rezultat la ieirea unui bloc de conversie poziie turaie, pe
29
baza poziiei rotorului u . Regulatorul de turaie de tip PI preia abaterea *r r i precizeaz la
ieirea sa cuplul electromagnetic impus m*. Acesta mpreun cu fluxul rotoric impus '*r
reprezint mrimile de la intrarea regulatorului pentru control vectorial indirect care calculeaz
componentele ortogonale ale fazorului curent statoric i *ds i i *qs precum i frecvena rotoric
relativ (alunecarea) *2 , obinut n baza relaiei:
Utilizarea consecutiva a blocului de transformare de coordonate respectiv de faze
o|abc genereaz curenii de referin care se compar apoi cu valorile msurate.
Abaterile obinute prin diferena curenilor de referin i curenii msurai, comand
regulatorul de curent la ieirea caruia se obin tensiunile de comand, prin intermediul crora se
obin semnale pentru comanda tranzistoarelor IGBT ce echipeaz invertorul PWM.
30
4. Invertorul trifazat. Tehnici PWM (MID) utilizate n
comanda intertoarelor
4.1 Prezentare general
Invertoarele de tensiune sunt convertoare statice reversibile care realizeaz conversia energiei
din curent continuu n curent alternativ i invers, prin alternarea dup o anumit logic a strilor
de conducie a dispozitivelor electronice de putere din alctuirea lor. Odat cu amploarea pe care
dezvoltarea electronicii de putere a dat-o utilizrii acionri electrice reversibile (AER), calitatea
formelor de und sintetizate de ctre acest tip de convertoare s-a mbuntit semni ficativ n
sensul reducerii zgomotului, al coninutului de armonici din curentul i tensiunea aplicate
sarcinii, prin dezvoltarea de noi configuraii i strategii de comand a elementelor de comutaie.
Transformarea energiei din curent continuu n curent alternativ cu ajutorul invertoarelor are
ca scop alimentarea unor sarcini care necesit n funcionare tensiuni alternative cu amplitudine
i frecven variabile.
Un invertor trifazat (de tensiune sau de curent) se compune n principiu din din trei
invertoare monofazate n punte, cuplate n paralel. Comanda fiecrui bra este decalat astfel nct
la ieires se obin un sistem trifazat simetric de tensiuni. Analiza tensiunilor de la ieirea
invertorului se face prin raportarea lor la un punct median al cii de curent continuu, punct care
poate fi real sau fictiv. Aceast metod a fost adoptat deoarece, majoritatea schemelor utilizate
n prezent, au pe calea de curent continuu un divizor capacitiv cu rol de filtru. Punctul neutru al
acestuia se consider punct de referin pentru tensiunile de la ieirea invertorului. Schema unui
astfel de invertor trifazat, cu specificarea tensiunilor i curenilor este prezentat n figura 1.
Sarcina invertorului este nfurarea statoric conectat n stea, a unei maini asincrone trifazate.
31
Fig.1 topologia invertorului trifazat
Ca urmare a modului discret de funcionare a elementelor comandate din componena
invertoarelor, formele de und ale tensiunii i curenilor de la intrarea sau ieirea acestora se abat
de la forma sinusoidal. Formele de und ale curentului i tensiunii conin pe lng oscilaia
fundamentalei cu frecvena f
1
(50Hz, de exemplu) o serie de oscilaii parazite cu frecvena f = nf
1
(n=1,2,) numite armonici superioare, iar alte oscilaii cu frecvene inferioare valorii f
1
numite
subarmonici .Atenuarea oscilaiilor parazite se poate realiza cu ajutorul unor filtre. Aceast
soluie nu este agreat n totalitate dac se au n vedere dimensiunile de gabarit a acestor filtre i
preul de cost destul de ridicat.
Astfel, n condiiile sus menionate, pentru nlturarea acestor neajunsuri s-a optat pentru
realizarea unor tehnici de comand a invertoarelor mai complexe, cum ar fi construirea formelor
de und a mrimilor electrice de interes din trepte sau pulsuri modulate n durat. n cadrul
acestor tehnici de comand, cele mai utilizate sunt tehnicile de comand cu pulsuri modulate n
durat (PWM).
32
4.2 Tehnici PWM
Invertorul comandat cu ajutorul tehnicilor PWM, lucreaz n general cu frecven de comutaie
constant i trebuie s permit modificarea valorii efective a fundamentalei tensiunii de ieire n
limite relativ mari, cu pstrarea constant a tensiunii de intrare. Variaia tensiunii de ieire se
obine tocmai prin comand PWM a comutatoarelor invertorului i, totodat prin aceast
comand se urmrete aducerea tensiunii de c.a. de la ieire la o form de und ct mai apropiat
posibil de forma de und sinusoidal, pentru a uura filtrarea.
Utilizarea tehnicilor PWM la invertoare permit obinerea unor tensiuni de ieire calitativ
mai bune, care sunt mai uor de filtrat, deoarece se transleaz spre domeniul frecvenelor nalte
armonicile tensiunii de ieire. n majoritatea sistemelor de acionare electric cu vitez reglabil
actuale, pentru modificarea n limite largi a frecvenei simultan cu modificarea amplitudinii
tensiunii de alimentare a motoarelor asincrone i pentru reducerea coninutului de armonici de
joas frecven a acestei tensiuni, se utilizeaz modularea n durat a impulsurilor de tensiune,
cunoscut sub denumirea de comand PWM. n principiu, aceast metod const n fragmentarea
duratei de conducie a contactoarelor statice n scopul reducerii coninutului de armonici de joas
frecven al tensiunii de la ieirea invertorului.
Metoda modulaiei n durat a impulsurilor se aplic n principal la invertoarele de
tensiune.Uneori, se aplic i pentru invertoarele de curent, ns numrul de impulsuri de curent
modulate ndurat pe intervalul de 120 electrice este limitat datorit apariiei supratensiunilor
periculoase datorate ntreruperii curentului. n cele ce urmeaz, se va face referire la metoda
modulaiei impulsurilor n durat aplicat impulsurilor de tensiune (la convertoarele statice de
tensiune).
In prezent cea mai utilizat tehnic PWM este cea sinusoidal. La acest tip de invertoare
semnalele de comand sunt generate comparnd o und triunghiular v
tr
(t), avnd amplitudinea
V
tr
si frecventa fs cu o unde de referinta v
r
(t) avand amplitudinea V
r
si frecventa
f
1.
Frecvena
undei de referin este egal cu frecvena dorit a tensiunii alternative de la ieirea invertorului,
iar amplitudinea undei de referin este direct legat de valoarea efectiv a fundamentalei
tensiunii de la ieirea invertorului.
33
Tehnicile PWM pot fi:
- singulare, cnd dispozitivele semiconductoare de putere din componena invertorului
primesc un singur impuls de comand in timpul fiecrei perioade a tensiunii de ieire. Durata de
conducie poate fi modificat. Se spune ca invertorul lucreaz cu und rectangular;
- multiple, cnd dispozitivele de putere primesc mai multe impulsuri de comand in
timpul fiecrei perioade a tensiunii de ieire. Duratele de conducie dintr-o perioad pot fi egale,
cnd tensiunea de referin este constant, sau variabile, cnd unda de referin este alternativ,
mai precis sinusoidal.
O bun calitate a tensiunii de ieire se obine atunci cnd se folosete modulaia multipl,
cu und de referin sinusoidal, cunoscut sub denumirea de tehnic PWM sinusoidal.
Parametrii care caracterizeaz o tehnic PWM sinusoidal sunt:
- raportul de modulare in frecven:
- raportul de modulare in amplitudine:
Modulaia se numete sincron dac m
f
i asincron dac m
f
R . In cazul
modulaiei sincrone coninutul in armonici superioare depinde de m
f
. n cazul modulrii
asincrone, factorul de modulaie n frecven m este constant, fiind un multiplu ntreg al
frecvenei tensiunii de ieire f1 care este agal cu frecvena modulatoarei fm. n cazul modulrii
sincrone, factorul de modulaie n frecven se modific corelat cu frecvena f1, fiind ntotdeauna
un multiplu ntreg sau chiar fracionar al acesteia. Dac m i deci frecvena purttoarei este un
34
multiplu ntreg impar al frecvenei tensiunii de ieire pentru orice valoare a acestei frecvene,
pulsurile corespunztoare celor dou alternane, pozitiv i negativ, sunt identice.
Valoarea maxim a frecvenei de comutare este impus de caracteristicile contactoarelor
statice, n principal de frecvena maxim de comutare a acestora, la tensiunile i curenii de
funcionarea invertorului. Pe msur ce crete frecvena de comutare a invertorului, scade
coninutul de armonici de joas frecven a tensiunii de la ieire, dar crete ponderea armonicilor
de nalt frecven, scznd randamentul n tensiune al invertorului. Frecvena de comutare este
limitat de creterea pierderilor de comutare ale contactoarelor statice. Pe de alt parte,
caracteristicile dinamice ale contactoarelor impun adoptarea unui grad de modulaie n
amplitudine redus la frecvene mari ale tensiunii de ieire. Pentru frecvene mari ale tensiunii de
ieire i valori mari ale factorului de modulaie n amplitudine k, pot rezulta intervale de
conducie pentru contactoarele statice ale invertorului, mai mici dect timpii de intrare i ieire
din conducie ai acestora. Este motivul pentru care, la toate aplicaiile practice se prevede un
timp minim de conducie, numit timp de gard. Respectarea acestui timp de gard impune fie
limitarea frecvenei de comutare, fie o anumit valoare a gradului de modulaie la o frecven de
comutare dat.
Principiul modulrii impulsurilor in durat cu semnal sinusoidal
35
4.3 Dispozitivele de comutatie
Dispozitivele electronice de comutaie de putere, utilizate cu precdere la construcia
invertoarelor de tensiune, sunt tranzistoarele de tip IGBT (Insulate Gate Bipolar Transistor).
Ele sunt integrate de la una la ase uniti ntr-o capsul (modul), funcie de puterile pe care le
disip n funcionare, vezi figura Fig. 2.
Fig. 2. Module de putere cu tranzistoare IGBT
Structura echivalent i simbolul tranzistorului IGBT sunt prezentate n Fig. 2.1.
Fig. 2.1. Structura echivalent i simbolul tranzistorului IGBT
Comanda tranzistoarelor IGBT se realizeaz cu circuite integrate specializate, sau cu
36
structuri hibride. Acestea furnizeaz nivelele de tensiune de comand G-E necesare deschiderii /
blocrii tranzistorului, asigur protecia acestuia la supracureni, supratensiuni
isupratemperatur i permit interfaarea cu circuitele de comand ierarhic superioare.
Caracteristicile tipice IC(VCE), avnd ca parametru tensiunea de comand VGE sunt de
forma celor prezentate n Fig. 2.2, iar regimul dinamic este ilustrat n Fig. 2.3.
Fig 2.2 Caracteristicile statice ale tranzistorului IGBT
37
Fig. 2.3. Caracteristicile dinamice tipice ale tranzistoarelor IGBT
Productorii de componente furnizeaz i sisteme integrate, numite Module inteligente de
putere (IPM Intelligent Power Module), n care se regsesc att componentele de for ct i
cele de comand.
Pentru joas tensiune (400Vc.a.) sunt utilizate tranzistoare IGBT de 1200V. Curenii pe
element sunt de ordinul sutelor de amperi, la un grad de integrare de ase dispozitive/capsul,
putnd depi 1000 A pentru un dispozitiv / capsul. La cureni mai mari se practic dispunerea
n paralel fie a mai multor elemente, fie a mai multor invertoare
La tensiuni ridicate (medie tensiune) sunt utilizate, pe de-o parte structuri multinivel iar
pe de alt parte dispozitive capabile s preia n stare blocat aceste poteniale: IGCT (Integrated
Gate Commutated Thyristor), HV-IGBT (High Voltage IGBT), cu tensiuni de 3,3-6,5kV i
ETO (Emitter Turn-off Thyristor). Cu aceste dispozitive se poate atinge o putere de 5MW cu o
structur cu trei nivele.
Celelalte elemente de comutaie de putere, cu istorie mai ndelungat sau mai
recent:dioda, tiristoarele normale (SCR) sau cu stingere pe poart (GTO) i tranzistoarele de
tipMOS sunt utilizate fie n aplicaii speciale, fie n componena convertizoarelor de frecven
lablocurile de redresare sau n sursele n comutaie ce alimenteaz diversele subansambluri
decomand
O privire de ansamblu asupra dispozitivelor electronice de putere este oferit de fig 2.4 n
care sunt prezentate capabilitile (curent/tensiune) ale acestora.
38
4.4 Sistemul de acionare a tramvaielor modernizate
Sistemul de acionare, care cuprinde invertoarele trifazate de traciune 260FR/750
(fig.1 schema de principiu) i sistemul de coamnda cu microcontroler (codificat
SATREC_MMA03) formeaz un asamblu interconectat care asigur urmatoarele funcii:
- Comanda, controlul i reglarea vitezei i a cuplului de traciune, cu limitarea curentului in
regim de tractiune. Se limiteaza acceleraia i vitez in timp real la demaraj.
- Comanda, controlul i reglarea cuplului de franare electrica recupereativa cu comutaera
automata la si de al frnarea reostatic;
- Controlul antipatinrii roii la demaraj si antiblocarii acesteia la frnarea electric;
39
-Diagnoza sistemului de actionare si memorarea diagramei de mers
-Logica generala a vehiculului pentru functionarea independenta a 2 motoae asincrone
-La pierderea comunicattiei dintre invertoare si unitatea de comanda, invertoarele trec
automat n regim de frnare pn la oprire.
Fig 1. Schema de principiu a unui invertor trifazat de tractiune 260FR/750
Invertorul trifazat de tractiune 260FR/750 const in :
-Bloc invertor trifazat IGBT(3 module), minim 800 si 1700V;
-Baterie de condenastori filtru de retea CF, minim 8MF si 1100Vcc;
-Electronica de comanda cu Procesor de Semnal Digital DSP;
-Circuite de comande pe grila
-Traductoare de curent faz
-Traductoare de tensiune filtru;
40
-IGBT franare pentru limitarea tensiunii la franare , minim 800 Acc si 17000Vcc;
-Electronica de comanda cu microcontrolere
Aceasta conine trei ramuri, cte una pentru fiecare faz. In cazul in care redresorul care
furnizeaz tensiunea continu Vd este necomandat, iar invertorul alimenteaz un motor de c.a.
care se poate frna (prin micorarea frecvenei invertorului sub cea corespunztoare turaiei
motorului) transferul de energie se va face de la invertor ctre condensatorul C. In aceast
situaie tensiunea de pe condensatorul C poate crete periculos de mult. Pentru evitarea acestei
situaii a fost introdus o ramur suplimentar, care conine tranzistorul Q i rezistena de putere
R. In momentul in care tensiunea pe condensator depete o anume valoare se comand intrarea
in conducie a lui Q, iar condensatorul C se va descrca pe R.
4.5 Modelarea pe calculator a invertorului trifazat
Observm c folosindu-ne de programul Psim se poate simula comanda PWM de tip sinusoidal
pentru invertorul trifazat de tensiune.
Schema realizat n Psim.
41
Comanda
Formele de und Sr SrA, SrB, SrC, ale curenilor Ia, Ib i Ic, i a tensiunii U_AB.
42
n urma simulrii se poate observa, de asemenea, c exist armonica 1, la tensiunea de ieire
din invertor. Dei modelele pe calculator pot aproxima destul de bine funcionarea invertorului
trifazat cu comand PWM, se observ c formele de und n cazurile reale de funcionare prezint
mai muli parazii, deformri ale undei, care pot fi compensate prin diferite mijloace, dar soluiile
sunt complexe, cu un grad ridicat de dificultate. De asemenea, se poate observa c folosind tehnica
PWM la invertorul trifazat, la frecvene reduse apar armonici de frecven redus, care dispar ns
odat cu creterea frecvenei, fiind nlocuite de armonici de frecven nalt (armonicele joase fiind
mai duntoare sistemelor electrice, dect cele nalte).
43
5. Proiectarea echipamentului de acionare a tramvaiului
cu invertor trifazat
5.1 Parametri generali
Capitolul de fa urmrete propunerea i proiectarea unui echipament de acionare a tramvaiului
cu invertor trifazat. Se are n vedere, astfel, proiectarea unui invertor trifazat de tensiune cu
tranzistoare IGBT cu poarta izolat care sa alimenteze o sarcin cu urmatorii parametri:
U
n
=500 (V)
I
n
=345 (A)
f
max
=1.5KHz
T
med ambiant
=40
0
C
Invertorul trebuie s suporte suprasarcina de 1,5I
n
timp de 17 secunde. Schema de principiu a
unui invertor trifazat de tensiune (Fig.1) este realizat dintr-o punte de elemente bidirecionale
(T
1
-T
6
n antiparalel cu D
1
- D
2
).
44
Fig.1. Schema de principiu a invertorului trifazat de tensiune
Pentru obinerea unui sistem de tensiuni, trifazat simetric, momentele nchiderii
elementelor T
1
-T
6
sunt defazate cu
3
t
radiani i se distribuie succesiv elementelor de pe prile P
i N ale invertorului de pe faze diferite. Sunt posibile dou succesiuni de comanda: n ordinea
numerotrii elementelor, rezultnd la ieirea invertorului un sistem trifazat de succesiune direct
sau n ordinea invers numerotarii (T
1
-T
6
-T
5
-T
4
-T
3
-T
2
) care determina obinerea la ieirea
invertorului a unui sistem trifazat de tensiuni de succesiune invers.
Contactele pot rmne nchise fie
2
3
t
, fie t radiani. O utilizare mai eficient a
elementelor se obine dac fiecare element rmne nchis t radiani ntr-o perioad. n acest fel
elementele de pe o faz se gsesc permanent n stri inverse.
Strile elementelor T
1
-T
6
vor determina nmod univoc tensiunile de linie u
AB
, u
BC
i u
CA
.
Pentru obinerea acestora se va aplica teorema a II-a a lui Kirchhoff pe circuitul format de fazele
respective i elementele nchise de pe acestea .
Astfel pentru obtinerea tensiunii de linie u
AB
tinand seama de comenzile elementelor
rezulta:
pentru intervalul
2
0,
3
t
t
e
| |
e
|
\ .
, contactele T
1
i T
6
sunt nchise pe fazele A i B i
aplicand teorema a II-a a lui Kirchhoff pe circuitul T
1
faza A faza B T
6
C
d
se obtine
u
AB
=U
d
;
pentru intervalul
2
,
3
t
t
e t
| |
e
|
\ .
, contactele T
1
i T
3
sunt nchise pe fazele A i B i
conform teoremei a II-a a lui Kirchhoff pe circuitul T
1
faza A faza B T
3
rezulta: u
AB
=0;
45
pentru intervalul
5
,
3
t
t
e t
| |
e
|
\ .
, contactele T
4
i T
3
sunt nchise pe fazele A i B i
aplicand teorema a II-a a lui Kirchhoff pe circuitul T
4
faza A faza B T
3
C
d
avem u
AB
= -
U
d
.
Fig.2. Formele de unda aferente invertorului trifazat de tensiune
n general tensiunea de linie este nul pe intervalele cnd sunt nchise elementele de pe
aceeasi parte de pe fazele respective i este
d
U pe intervalele cand sunt nchise elemente ale
fazelor respective de pe pri diferite.
Tensiunile de faz sunt determinate de cele de linie tinndu-se seama de urmtoarele
relaii:
46
0
2
2 2 2
2 3
2
1
(2 )
3
ab a b
bc b c
a b c c a b
bc b a b a b
ab a b
ab bc a
bc a b
a ab bc
u u u
u u u
u u u u u u
u u u u u u
u u u
u u u
u u u
u u u
=
=
+ + = =
= + + = +
=
+ =
= +
= +
Construind tensiunea de faz u
a
pe baza relaiei (1.1) aceasta este format din trepte de
amplitudini
3
d
U
si
2
3
d
U
ceea ce face ca datorita caracterului RL al sarcinii curentul de sarcina
sa fie format din segmente de exponeniala. Caracterul inductiv al sarcinii determina defazarea
trecerilor prin zero ale curentului fat de trecerile prin zero ale tensiunilor n urma cu unghiul | .
Pe baza formelor de unda ale tensiunii i curentului de faz se pot face urmtoarele observaii:
unghiul de conducie al diodei
max
2
3
CD
t
= =
(1.2)
unghiul de conducie al tranzistorului
min CT
t t = = (1.3)
47
5.2. Calculul mrimilor caracteristice:
Valoarea eficace a fundamentalei tensiunii de linie
Se va considera originea timpului astfel incat tensiunea de linie sa fie funcie impara (sa
contina numai armonici n sinus). Valoare eficace a fundamentalei tensiunii de linie este :
2 5 / 6
1
0 / 6
1 2 6
sin ( ) sin ( )
2
ab d d
U u td t U td t U
t t
t
e e e e
t t t
= = =
} }
(2.1)
Valoarea eficace a tensiunii de linie
2
2 3
2 2
0 0
1 1 2
2 2 3
ef
t
ab ab d d
U u d t U d t U
t
e e
t
= = =
} }
(2.2)
Tensiunea din circuitul de c.c. (
d
U ) se poate calcula egalnd
ef
ab
U cu tensiunea
nominala a sarcinii (
N
U )
(2.3)
(2.4)
Ud=612V
ef
ab N
U U =
48
Valorile medii ale curenilor prin elemente
0 0
1 1
2 sin
2
t
TAV t n
I i dt I td t
t
t
e e
t
= =
} }
(2.5)
2
TAV n
I I
t
= (2.6)
=
TAV
I 155.3
C
TAV TAV SI
I I K >
(2.7)
>
C TAV
I 155.3
innd seama de faptul ca circuitul de c.c. furnizeaz n orice moment suma alternantelor
pozitive ale celor trei cureni de faz considernd curenii perfect sinusoidal i defazajul | nul se
obine:
(2.8)
Id=465A
innd cont de valoarea lui I
TAV
se alege un modul IGBT MG200J2YS50cu urmtoarele
caracteristici de catalog (vezi figura urmtoare):
49
50
51
5.3 Consideraii privind pierderile n elementele complet comandate:
Elementele semiconductoare comandate lucreaz, de regul, la frecvene ridicate i, datorit
fenomenelor complexe legate de intrarea i respectiv ieirea din conducie, calculul exact al
pierderilor este practic imposibil, acestea depinznd de foarte multe mrimi care, la rndul lor,
sunt dependente de parametrii circuitului n care este montat elementul semiconductor.
O estimare a pierderilor (i evidenierea principalelor componente) se poate face
considernd un circuit simplu (fig. 3), care utilizeaz sursa de c.c. avnd tensiunea U
d
, ce
alimenteaz sarcina S, cu caracter R,L,C. Dioda ideal D, asigur existena curentului prin
sarcin, cnd elementul semiconductor T, presupus de asemenea ideal, este deschis.
Se va considera c, procesul de amorsare se declaneaz la trecerea semnalului de comand
u
c
pe nivel sus, iar cel de dezamorsare, la trecerea semnalului de comand pe nivel jos (fig.
4a). Cnd elementul semiconductor este blocat (deschis), curentul ce l strbate este nul, iar
tensiunea ce l polarizeaz este tensiunea sursei U
d
, iar cnd se afl n conducie (nchis), este
parcurs de curentul I
d
, pe el caznd tensiunea v
T
. S-a considerat, pentru simplificare, c att la
amorsare ct i la dezamorsare, curentul i tensiunea au variaii liniare.
Dup aplicarea semnalului pozitiv de comand, creterea curentului prin element are loc
dup un timp scurt, numit timp de ntrziere la amorsare t
da
.
Fig. 3 Schema de principiu pentru pierderile n elementele semiconductoare complet comandate
52
Fig. 4 Formele de und ideale, ale semnalului de comand - a), curentului i tensiunii - b),
i pierderilor - c), pentru un ciclu complet de funcionare, a unui element semiconductor
complet comandat
Tensiunea pe element se menine U
d
, pn cnd curentul crete la valoarea de regim
staionar I
d
, respectiv pe durat t
ci
, iar scderea tensiunii la valoarea V
CESAT
(v
T
) are loc n timpul
t
sv
.
53
Energia corespunztoare procesului de amorsare E
on
:
100 C
TAV
oncat on
I
I
E E =
(3.1)
(155/200) = 11,6 mj
La trecerea semnalului de comand la valoarea negativ fenomenele sunt similare,
evideniindu-se timpul de ntrziere la dezamorsaret
dd
, timpul de cretere a tensiunii pe
element t
cv
, i timpul de scdere a curentului t
si
.
Energia disipat n element n tipul procesului de dezamorsare este E
off
:
100 C
TAV
offcat off
I
I
E E =
(3.2)
(155/200) = 11,6 mj
Pe durata conductiei elementul semiconductor fiind parcurs de curent constant I
TAV
iar
caderea de tensiune fiind de asemenea constanta, rezulta energia disipat n stare de conductie :
c TAV CESAT S
t I V W =
(3.3)
t
c
= 250 s;
2.7*155*250*0.000001=104mj
Rezulta astfel energia totala corespunzatoare unui ciclu de comanda W
t
:
S off on t
W E E W + + = (3.4)
11.6+11.6+104= 127mj
54
Ca urmare pierderile totale P
t
sunt:
c t t
f W P = (3.5)
unde f
c
frecventa de comanda f
c
= 1.5 KHz
127 * 0.001 * 1.5 * 1000= 190.5 W
5.4. Verificarea elementelor semiconductoare, la nclzire
Aceast verificare are drept scop asigurarea c, n condiiile concrete de mediu i de ventilaie n
care lucreaz elementul nu se depete valoarea maxim admisibil a temperaturii jonciunii. n
general, este necesar verificarea la nclzire, att n regim staionar, (valoarea medie a
curentului prin element este presupus constant) cat i intermitent (valoarea medie a curentului
prin element este variabil).
5.4.1.Verificarea la nclzire n regim staionar
Orice element semiconductor de putere se monteaz pe un radiator, schema termica
echivalenta a ansamblului (fig. 5) evideniind mrimile
P
T
P
T
Fig. 5 Schema termica echivalenta n regim staionar a circuitului de rcire al unui modul IGBT
55
R
th J-C
rezistenta termica jonciune-capsula, a elementului care este dat de catalog;
R
th C-R
rezistenta termica capsula-radiator, care reprezint rezistenta de contact,
depinznd de calitatea suprafeelor n contact, (a capsulei i a radiatorului) i de fora de
strngere;
R
th R-A
rezistenta termica radiator-mediu ambiant, ce depinde de suprafaa i tipul
radiatorului precum i de natura, debitul i viteza fluidului de rcire.
Observnd figura 5 rezulta temperatura jonciuni ca fiind dat de relaia:
2
2 2
thJ C thC R
j A T thR A
R R
T T P R
| |
= + + +
|
\ .
(4.1)
Relaia de mai sus poate fi utilizat n doua scopuri, dupa cum, s-a ales sau nu radiatorul.
a. pentru calculul temperaturii jonctiunii, daca s-a ales corpul de racire corespunzator
tipului capsulei modulului utilizat. Elementul este verificat, daca valoarea calculat a
temperaturii jonctiunii este mai mica decat valoarea maxim admisibila (indicat n
catalog).
T
J
<T
J adm
(4.2)
b. pentru calculul valorii maxime a rezistentei termice radiator-ambiant si, pe aceasta
baz se alege sau se dimensioneaz radiatorul respectiv punand conditia (2.18) n
(2.17) se obine :
2 2 2
R thC C thJ
t
A J
A thR
R R
P
T T
R
<
(4.3)
0.289 -0.14/3-0.35/2= 0.277=3
Pe baza valorii obinute conform relatiei (4.3) se poate dimensiona radiatorul pe doua cai:
56
a. se alege un corp de racire corespunzator cu tipul capsulei a elementului;
b. se alege un profil de radiator de asemenea corespunzator corespunzator cu tipul
capsulei i din grafice adecvate se determina lungimea necesara ca functie termica
radiator-ambiant calculat i de conditiile de racire.
Pentru o alegere mai buna a radiatorului se mparte valoarea obinut conform relaiei (4.3) la 2.
0.1
thR A
R
s 5
Din catalogul de radiatoare s-a ales un radiator SK 541 cu lungimea de 300 mm avnd
caracteristicile date n tabele din figura de mai jos.
57
Relatia (4.2) trebuie s se verifice astfel ca:
|
.
|
\
|
+ + + =
Acat thR
R thC C thJ
T A j
R
R R
P T T
2 2
2
(4.4)
= 40 +2*190*(0.7+0.17+0.15)=427
5.4.2.Verificarea la nclzire n regim intermitent
Datorit sarcinii, elementele semiconductoare pot fi parcurse de curent variabil, (n cazul
funcionrii cu impulsuri de curent cu frecven mare, elementele se afl n regim termic
intermitent, chiar dac amplitudinea impulsurilor este constant ), situaie n care, temperatura
jonciunii se modific continuu n jurul valorii medii. Asimilnd variaia curentului prin element
cu o variaie treapt (fig. 6), la apariia unei suprasarcini, temperatura jonciunii crete
aproximativ exponenial.
Fig. 6 Variaia temperaturii jonciunii, la o variaie treapt a curentului printr-un IGBT.
La funcionarea n regim intermitent n schema termic, echivalent (fig. 5) apar i capaciti
termice, astfel nct, se obine o schem n care, rezistenele termice sunt nlocuite cu impedane
58
termice tranzitorii cu excepia rezistentei termice de contact capsul - radiator, unde nu se poate
nmagazina cldur.
Variaia tipic a unei impedane termice se indic n fig. 7, observndu-se c valoarea de
regim staionar a acesteia este tocmai rezistena termic i c, aceasta se atinge dup un timp t
s
.
Astfel variaia n timp a temperaturii jonciunii este dat de:
( )
2
2 2
2 2 2 2
thJ C thC R thJ C thC R
j A tm thR Acat t tm thR Acat
R R R R
T T P R P P Z
| | | |
= + + + + + +
| |
\ . \ .
(4.5)
in care P
tm
reperezinta media pierderilor:
1 2 2
1 2
t t
tm
P t P t
P
t t
+
=
+
(4.6)
Unde:
P
t
reprezinta pierderile totale corespunzatoare curentului inainte de aparitia suprasarcinii
P
t2
reprezinta pierderile totale corespunzatoare curentului de suprasarcina
2
1.5
t t c
P W f = (4.7)
190*1.5=285
23
59
fig.7 Variatia unei impedante termice n functie de timp
Valoarea impedanei termice radiator-ambiant este dat de relaia:
19
39
thR A thR A
Z R
= (4.8)
19
0.06 0.03
39
thR A
Z
= =
Astfel nlocuind n relaia (4.5) mrimile calculate se vca obine valoarea maxima a
jonciunii:
( )
0.22 0.32 0.22 0.32
40 2 113.9 0.06 2 169.44 113.9 0.03
2 2 2 2
j
T
| | | |
= + + + + + +
| |
\ . \ .
148.37
j
T =
Pentru ca elementul s fie verificat la nclzire n regim intermitent trebuie s fie
ndeplinit condiia:
T
J
<T
J adm
T
J adm
=150
0
elementul este verificat la nclzire n regim intermitent.
5.5. Dimensionarea filtrului din circuitul intermediar
Circuitul intermediar este caracterizat de un filtru L-C, n care inductivitatea este suma dintre
inductivitatea de dispersie total, pe faz, raportat la secundar, a transformatorului i a filtrului.
De asemenea, n serie cu inductivitatea este prezentat o rezisten corespunzatoare
filtrului i transformatorului.
Pentru obinerea unor rezultate uor de analizat n analiz i proiectare se vor utiliza uniti
relative prin introducerea urmtoarelor mrimi de baz:
60
tensiunea de baz:
2
B S
U U = (5.1)
curentul de baz :
B dN
I I = (5.2)
inductivitatea de baz :
2
2
S
B
dN
U
L
f I t
=
(5.3)
capacitatea de baz :
( )
2
1
2
B
B
C
f L t
=
(5.4)
dN d
U U = =612 (5.5)
2
2
dN
S
U
U
t
= =1.57*612 /1.41=686V (5.6)
2 sin
6
6
N
dN
I
I
t
t
= =1.41*345*0.5/0.5=486A (5.7)
61
100 f Hz =
5%
d
U A = 20 c =
=8.5mH
( ) ( )
3 3
2 2
1 10 10
0.000296
3369616.896
2 2 3.14 100 8.544
B
B
C
f L t
= = = =
0.1
8.544 0.1 0.854
f B
f
L L
L mH mH
=
= =
(5.8)
f B
C C c = (5.9)
0.000296 20 5920
f
C F = =
Datorit capacitii foarte mare a condensatorului ce trebuie folosit n circuitul intermediar
se vor folosi doua condensatoare aezate n paralel.
Condensatoarele vor fi B25 353 A9488-K4 (4800F) i B25 353 J9148-K4 (1440F).
62
6. Concluzii
Lucrarea i-a propus ca scop studierea invertorului de traciune i motorul asincron ntr-un
context practic.
In primul capitol s-au prezentat ideile de baz i necesitatea modernizrii transportului
urban.
In al doilea capitol s-a studiat istoricul i tendinele de dezvoltare a tehnologiei folosite n
mijloacelor de transport n comun.
In urmatoarele dou capitole, trei i patru, s-a studiat motorul asincron de traciune i
invertorul trifazat de tensiune. La motorul asincron s-a descris funcionarea general, modelele
matematice i metodele de reglare i control. La invertor s-a pus n eviden modul de funcionare,
tehnologiile folosite, avantajele i dezavantajele invertorului trifazat, posibilitatea modelrii pe
calculator.
Folosind materialele din bibliografie i accesul la informaiile de proiectare i execuie de la
SAERP i UMEB, n capitolul 5 s-a proiectat un invertor de tensiune avnd datele de intrare
identice cu cele alte invertorului tririfazat folosit n tramvaiele modernizate.
n urma studiului efectuat s-a observat c invertorul este o pies de tehnologie ridicat, cu
funcionalitate flexibil, care poate ndeplini mai multe funcii de comand i control. Dei
modelele pe calculator pot aproxima destul de bine funcionarea invertorului trifazat cu comand
PWM, se observ c formele de und n cazurile reale de funcionare prezint mai muli parazii,
deformri ale undei, care pot fi compensate prin diferite mijloace, dar soluiile sunt complexe, cu
un grad ridicat de dificultate. De asemenea, se poate observa c folosind tehnica PWM la
invertorul trifazat, la frecvene reduse apar armonici de frecven redus, care dispar ns odat cu
creterea frecvenei, fiind nlocuite de armonici de frecven nalt (armonicele joase fiind mai
duntoare sistemelor electrice, dect cele nalte).
63
Pe ansamblu, se poate observa c, dei acest sistem de invertor trifazat de tensiune i motor
asincron ofer mai multe avantaje din punct de vedere al economisirii energiei, al performanelor
tehnice, el comport totui o problem, anume implic un grad complex, nalt, al mentenanei
tehnice i nevoia de personal specializat.
Doresc n final s multumesc Prof. Dr. Ing. Valentin Nvrpescu i Conf. Dr. Ing. Ioan
Strinescu pentru supervizarea oferit de-a lungul cercetrii i scrierii lucrrii. De asemeni,
mulumesc pe aceast cale i Dr. Ing. Emil Tudor, precum si domnului director al UMEB, Dr. Ing.
Gheorghe Chiu pentru sprijinul i ajutorul oferit, pentru accesul la documentaie, la bazele de date
i utilaje.
64
Anexa 1: Schema general
Schema general a acionrii tramvaiului
65
Anexa 2: Schem invertor
Schema electric de principiu pentru invertoarele de traciune
66
Anexa 3: Gabarit sistem cu invertoare
Gabaritul echipamentelor de acionare cu invertoare
67
Bibliografie
[1] Alexa, D., Ionescu, F., Gtlan, L., Lazr, A.: Convertoare de putere cu circuite
rezonante, Bucureti: Ed. Tehnic, 1998.
[2] Alexa, D.; Micu, D., Invertoare i redresoare cu parametri energetici ridicai,
Bucureti : Ed. Tehnic, 1986.
[3] Alexa, D.; Hrubaru, O., Aplicaii ale convertoarelor statice de putere, Bucureti:
Ed. Tehnic, 1989.
[4] Alexandrescu, C.M., Strinescu, I, Rdulescu, Buretea, V.L., Boza, Fl., Enache,
B., Echiparea i modernizarea vagoanelor de cltori n conformitate cu
normele europene. Contract CEEX nr. X1C04/2005, in CEEX. PROGRAMUL
DE CERCETARE DE EXCELEN 2005 2008 UCP AMTRANS (Consoriul
IPA SA SIAT SA), 2007, pp.5-8
[5] Brc-Gleanu, ., .a., Electronic de putere-Aplicaii, Bucureti: Ed. Militar,
1991.
[6] Bose, B. K., ed. Adjustable Speed Ac Drive Systems. IEEE Press Selected Reprint
Series. New York: IEEE Press: sole worldwide distributor, Wiley, 1981,
[7] _______, Modern Power Electronics and AC Drives, Prentice Hall, Upper Saddle
River, New Jersey 07458, USA, 2002.
[8] Cory, B. J. High Voltage Direct Current Convertors and Systems. London: Macdonald, 1965,
[9] Covrig, M.; Cepisca, C.; Melcescu, L.; Convertoare electrice, Bucureti: Editura
Printech, 2002
68
[10] Ertl, H., Kolar, J.W., Zack F.C. Analysis of different current control concepts for forced
commutation rectifier (FCR), Proceedings of Conference on Power Conversion,
Mnchen, Germany, June 1986, pp. 195-217.
[11] Floricu D., Sisteme de comand pentru convertoarele statice de putere,
Bucureti: Editura Printech., Bucureti, 1997.
[11] Frca C., Petreu D., Palaghi N., mbuntirea factorului de putere n
sistemele moderne de alimentare, Cluj-Napoca: Editura RISOPRINT, 2003.
[12] Foch, H., i alii, Elements constitutifs dans les convertisseurs statiques,
commutation dans les convertisseurs statiques, dualite dans le convertisseurs
statiques, Techniques de lingenieur, Traite dElectrotechnique D3152, D3153,
D3154.
[13] Fransua, A.; Mgureanu, R.: Electrical Machines and Drive Systems. Bucureti:
Ed. Tehnic, in collaboration with Technical Press, Oxford, 1984.
[14] Floricu, D., Sisteme de comand pentru convertoarele statice de putere,
Bucureti: Ed. Printech, Bucureti, 1997.
[15] Floricu, D.; Hapiot, J-C. Convertoare statice de putere. Structuri i comenzi,
Bucureti: Editura Printech, 2000.
[16] Fodor, D. .a., Convertoare statice de putere speciale, Bucureti: Ed. Printech,
1997.
[17] Gtlan, C., Dispozitive semiconductoare de putere moderne, Iai: Ed. Gh. Asachi,
Iai, 2000.
[18] Hautier, J-P., Caron, J-P. Convertisseurs statiques. Methodologie causale de
modelisation et de commande, Paris: Edition Technip, 1999.
69
[19] Imecs M., Vector Control Systems for Positioning of Induction Motors Fed by
Static Converters (in Romanian), PhD Thesis, Supervisor Prof. . Kelemen,
Technical University of Cluj-Napoca, 1989.
[20] ______, Synthesis about pulse modulation methods in electrical drives, Part 3:
Open-loop voltage-controlled PWM procedures,. Acta Universitatis
CIBIENSIS, Vol. XVI Technical series, H. Electrical Engineering and
Electronics, 1999, Lucian Blaga University of Sibiu, pp. 15-26.
[21] ______, Open-loop voltage-controlled PWM procedures. Proceedings of
ELECTROMOTION 99, Volume I, 1999, Patras, Greece, pp. 285-290.
[22] _______, How to correlate the mechanical load characteristics, PWM and field-
orientation methods in vector control systems of AC drives, Bulletin of the
Polytechnic Institute of Iassy, Tomul XLVI (L), Fasc. 5, Iai, 2000, pp. 21-30.
[23] Ionescu F., Floricu D., Niu S., Jean-Paul Six, Delarue P., Bogu C.,
Electronic de putere Convertoare statice, Bucureti: Ed. Tehnic, 1998.
[24] Ionescu, F., Niu, S., Floricu, D., Electronic de putere vol I Dispozitive
semiconductoare, Bucureti: Ed. ICPE, Bucureti, 2000.
[25] Ionescu, F.; Floricu, D.; Niu, S., Electronica de putere: modelare i simulare,
Bucureti: Ed. Tehnic, 1997.
[26] Ionescu, F.; Floricu, D.; Niu, S., Electronica de putere. Convertoare statice,
Bucureti: Ed. Tehnic, 1998
[27] Kelemen rpd, Imecs Maria: Procedure and Driving Device for Unitary
Automatic Vector Control of the Active and Reactive Power of Synchronous
Generators by Means of Frequency and Voltage Regulation (in Romanian).
Patent of Invention Nr. 104278/30.10.1989, Romania.
70
[28] Kelemen rpd, Imecs Maria: Sisteme de reglare cu orientare dup cmp ale
mainilor de curent alternativ. Editura Academiei Romne, Bucureti, 1989.
[29] Kisch, D.O., Kisch, M., Reglarea vectoriala a masinilor de current alternativ,
Bucureti: Ed. ICPE, 1997.
[30] Lucanu, M., Convertoare performante de curent continuu, Bucureti: Ed.
Printech, Bucureti, 1997.
[31] Mohan N., Undeland T., M., Robbins W., P., Power Electronics Converters,
Applications and Design, (New York: Wiley), 1995.
[32] Nvrpescu V., Mircea Covrig C., Todos P., Comanda numeric a vitezei
mainii asincrone, Bucureti: Electra (ICPE), 1998.
[33] Nvrpescu V., Crciunescu A., Soran I.F., Kisck D.O., Caiet de laborator -
Acionri electrice de curent alternativ, UP - Bucureti, 1997, 40 p.
[34] Nvrpescu V., Crciunescu A., Soran I.F., Kisck D.O., Acionri electrice -
ndrumar de laborator, UP - Bucureti, 1997, 122p.
[35] Palaghi, N., Electronic de putere partea I Dispozitive semiconductoare de
putere Editura MEDIAMIRA Cluj-Napoca 2002.
[36] Palaghi N., Petreu D., Frca C., Electronic de putere partea a-II-a.
Circuite electronice de putere, Editura MEDIAMIRA, Cluj-Napoca, 2004.
[37] Popescu, M., Manias, S., Popescu, C.L., Convertoare statice cu comutaie
forat-surse de c.c. n regim de comutaie, filtre active de putere, Bucureti:
Ed. ICPE, 1997.
[38] Popescu, M.; Manias, S.; Popescu, C.L., Convertoare statice cu comutatie la
retea. Alegere i dimensionare, Bucureti: Editura ICPE, 2001.
71
[39] Rdulescu, V., Rolul transportului public local n dezvoltarea urban
durabil, Bucureti: SAERP, 2010.
[40] Silard, Andrei, Tiristoare cu blocare pe poart GTO, Bucureti: Ed. Tehnic,
Bucureti, 1990.
[41] Strinescu, I., Tudor, E., Serbu, V., Boza, Fl. Badea, S., Speed Control of
Subways and Trams, n C.A. Brebbia (ed), Urban Transport XIV. Urban
Transport and the Environment n the 21st Century, Wessex: Wessex Institute
of Technology Press, 2008, pp 515-523.
[42] Svensson, Tore. On Modulation and Control of Electronic Power Convertors.
Gteborg: Dept. of Electrical Machines and Power Electronics, 1988.
[42] Tudor, E.; Strinescu, I., EA-TRAM-IvF Sistem de acionare cu invertoare
trifazate i motoare asincrone pentru tramvai, Specificatie tehnica 62/10,
SAERP, 2011.
[43] Rashid M., Power Electronics: Circuits, devices and Applications, Second
Edition, Prentice Hall, USA, 1993.
[44] Wells, R. (Robert). Static Power Convertors: Performance and Application. A
Series of Monographs on Electrical Engineering, vol. 17. London: Chapman &
Hall, 1962.
[45] Mircea Baba :Proiect de diploma: Interfatarea la retea a invertoarelor de
tensiune cu PWM, Universitatea Politehnica din Timisoara, 2008
[47] Platforma Laborator 1-2, materia Convertoare statice II
[48] Master Plan-ul General pentru Transport Urban Bucureti
72
[49] Recomandari pentru implementarea Master Plan-ului de transport n
Bucureti
[50] http://www.ratb.ro/istoric.php
S-ar putea să vă placă și
- Sistem de Transport Neconventional - MaglevDocument88 paginiSistem de Transport Neconventional - MaglevIuliaAndreeaSîngeorzan100% (1)
- Referat 1Document85 paginiReferat 1Bogdan Tanasoiu100% (1)
- Partea 0 - Caiet de SarciniDocument59 paginiPartea 0 - Caiet de SarciniSandu Elena Livia50% (2)
- Descriere Incercare BoghiuriDocument6 paginiDescriere Incercare BoghiuriMihai MatacheÎncă nu există evaluări
- Specificatie Tehnica C-DeCKDocument20 paginiSpecificatie Tehnica C-DeCKGabriel CaraveteanuÎncă nu există evaluări
- Locomotive Electrice Cu Baterii PPDocument11 paginiLocomotive Electrice Cu Baterii PPDragos JimbeiÎncă nu există evaluări
- 0291bi Lde060Document224 pagini0291bi Lde060ThuderboyÎncă nu există evaluări
- Disertatie ViorelDocument50 paginiDisertatie ViorelRobert BiaÎncă nu există evaluări
- Vehicule Pe Sine Pentru Transport Urban - CursDocument68 paginiVehicule Pe Sine Pentru Transport Urban - CursBogdyIonSli100% (4)
- Tractiuni Electrice SubiecteDocument28 paginiTractiuni Electrice SubiecteJohnJonÎncă nu există evaluări
- Tema Crus SDTFDocument9 paginiTema Crus SDTFCristian Mihai MihăilaşÎncă nu există evaluări
- ASRO CT146 2009 Transport FeroviarDocument19 paginiASRO CT146 2009 Transport FeroviarAlina Nica NicaÎncă nu există evaluări
- Masini AsincroneDocument44 paginiMasini AsincroneRobertCozianu100% (1)
- NTF BoghiuriDocument67 paginiNTF BoghiuriAdrian AxinÎncă nu există evaluări
- Sisteme Aeriene RobotizateDocument97 paginiSisteme Aeriene RobotizateBogdan Bogdan100% (1)
- EA001Document2 paginiEA001Der KruppÎncă nu există evaluări
- LHy M - Studiu de Solutii - Etapa 1 1 PDFDocument56 paginiLHy M - Studiu de Solutii - Etapa 1 1 PDFSilviu Tichieru100% (1)
- Manual de Functionare LDE - EGMDocument6 paginiManual de Functionare LDE - EGMDiana HopuÎncă nu există evaluări
- Anuar Absolventi 2012Document99 paginiAnuar Absolventi 2012radumunteanuscribdÎncă nu există evaluări
- Tractiune ElectricaDocument184 paginiTractiune ElectricaUn Gaby100% (4)
- CCM 2022-2023 CFR CalatoriDocument97 paginiCCM 2022-2023 CFR CalatoriMihaiNicolaeÎncă nu există evaluări
- 3.memoriu General Sect 3-Lot 2-20.07.11Document134 pagini3.memoriu General Sect 3-Lot 2-20.07.11cerebralmindÎncă nu există evaluări
- Glosar Termeni Utilizati in CFRDocument9 paginiGlosar Termeni Utilizati in CFRCristian BaneaÎncă nu există evaluări
- 4 Proiectarea Liniilor de Contact +ƒi A Echipamentului Deschiderii PDFDocument85 pagini4 Proiectarea Liniilor de Contact +ƒi A Echipamentului Deschiderii PDFCoty62Încă nu există evaluări
- Trenurile de Mare VitezaDocument18 paginiTrenurile de Mare VitezaMihaiÎncă nu există evaluări
- Legislatie AFER1Document41 paginiLegislatie AFER1Mircea Bobar0% (1)
- Ordine Scoala Mec BVDocument126 paginiOrdine Scoala Mec BVFlorina LozaÎncă nu există evaluări
- FraneDocument61 paginiFraneAnne Marrie H100% (4)
- Indrumar de Laborator CRP - Final - 2021Document139 paginiIndrumar de Laborator CRP - Final - 2021Raresh CristianÎncă nu există evaluări
- IL 10064 02-Sistem CombusibilDocument50 paginiIL 10064 02-Sistem CombusibildennisfreeÎncă nu există evaluări
- EnergieEoliana PDFDocument61 paginiEnergieEoliana PDFAndreeaÎncă nu există evaluări
- Aparatul de Legare Standard 850 KN Tip UICDocument61 paginiAparatul de Legare Standard 850 KN Tip UICȘtefan Apostol100% (1)
- Carte IIT 2013 PDFDocument242 paginiCarte IIT 2013 PDFeugenstefanÎncă nu există evaluări
- Caiet de Sarcini - Osii Motoare - Autom DESIRO - 831.2012Document23 paginiCaiet de Sarcini - Osii Motoare - Autom DESIRO - 831.2012Costi1100% (1)
- Calcul de Stabilitate Si Asieta - Cargoplan-UlDocument5 paginiCalcul de Stabilitate Si Asieta - Cargoplan-UlOvidiu PapucÎncă nu există evaluări
- Arcuri Lamelare La Vagoanele de Marfa-Dinu DraganDocument9 paginiArcuri Lamelare La Vagoanele de Marfa-Dinu DraganZero PulseÎncă nu există evaluări
- Normativ ID 28-04. Proiectare Sisteme Constructive de Pozare A Cablurilor in Profilul Transversal Al Caii FerateDocument29 paginiNormativ ID 28-04. Proiectare Sisteme Constructive de Pozare A Cablurilor in Profilul Transversal Al Caii FerateElena Pop100% (1)
- Metodologie Certificat ERIDocument26 paginiMetodologie Certificat ERICatalin Nicolae SasuÎncă nu există evaluări
- Referat BoghiuDocument3 paginiReferat BoghiuServiciul Bugete si CheltuieliÎncă nu există evaluări
- TMVTF 6Document15 paginiTMVTF 6Evianvittel100% (1)
- Structuri PortanteDocument18 paginiStructuri PortanteCodreanu VasileÎncă nu există evaluări
- Descrierea Vagonului Seria 2190 Clasa A II-aDocument5 paginiDescrierea Vagonului Seria 2190 Clasa A II-aSilvia AntonÎncă nu există evaluări
- Lucrare de DiplomaDocument13 paginiLucrare de DiplomaFlori BâldeaÎncă nu există evaluări
- Curs FiabilitateDocument388 paginiCurs FiabilitateRamona CinjauÎncă nu există evaluări
- VAGON SERIA 26 26 - 100 - 120 - 140 - 160 KM - HDocument2 paginiVAGON SERIA 26 26 - 100 - 120 - 140 - 160 KM - HGabriel AndreiÎncă nu există evaluări
- PCS PDFDocument214 paginiPCS PDFGabi MărgeanÎncă nu există evaluări
- Proiect Suporturi Ale Retelei de TelecomunicatiiDocument44 paginiProiect Suporturi Ale Retelei de TelecomunicatiiCosti DumitruÎncă nu există evaluări
- Raspunsuri MADocument7 paginiRaspunsuri MAIordan Andrei100% (1)
- Motoare Cu Ardere InternaDocument29 paginiMotoare Cu Ardere Internabenedek_lati0% (1)
- Boghiul MindenDocument17 paginiBoghiul MindenAlexandru Ionescu100% (1)
- Trenuri de Mare VitezăDocument8 paginiTrenuri de Mare VitezăStefanÎncă nu există evaluări
- Boghiurile LE 5100 KWDocument1 paginăBoghiurile LE 5100 KWCatalin Marian Vartosu-TomaÎncă nu există evaluări
- SAE Utilizand SimulinkDocument13 paginiSAE Utilizand Simulinkgeorgik55Încă nu există evaluări
- Proiectare Aerodromuri Mo366bis2015Document304 paginiProiectare Aerodromuri Mo366bis2015IONELA_DEOSLEAÎncă nu există evaluări
- Prinderi ElasticeDocument8 paginiPrinderi ElasticeAna-Maria LucaÎncă nu există evaluări
- Raport Activitate Metrorex Romania 2011Document32 paginiRaport Activitate Metrorex Romania 2011Avram Emanuel-IonutÎncă nu există evaluări
- Transportul Public 2.transportul Urban in BucurestiDocument7 paginiTransportul Public 2.transportul Urban in Bucurestilho64Încă nu există evaluări
- Propunere de Politica PublicaDocument13 paginiPropunere de Politica Publicaadelinairina100% (1)
- Disertatie PaulaDocument73 paginiDisertatie PaulaPop Polly100% (1)
- Referat AndreeaDocument3 paginiReferat AndreeaAdreea&Vlad BabanÎncă nu există evaluări
- Cerere-TIP de Evaluare HandicapDocument1 paginăCerere-TIP de Evaluare HandicapBaban VladÎncă nu există evaluări
- DispozitiveDocument1 paginăDispozitiveBaban VladÎncă nu există evaluări
- Cotoman, R., 2006, Kinetoterapie-Metodica Desfășurării Activității Practice, Editura Fundației România de Mâine, BucureștiDocument1 paginăCotoman, R., 2006, Kinetoterapie-Metodica Desfășurării Activității Practice, Editura Fundației România de Mâine, BucureștiBaban VladÎncă nu există evaluări
- Comunicarea Nonverbala ReferatDocument7 paginiComunicarea Nonverbala ReferatBaban VladÎncă nu există evaluări
- Intervertebrale de La Acest Nivel, Dar Și A Articulațiilor InterapofizareDocument1 paginăIntervertebrale de La Acest Nivel, Dar Și A Articulațiilor InterapofizareBaban VladÎncă nu există evaluări
- NO Ţiuni de Fiziologie Ale Sistemului CardiovascularDocument15 paginiNO Ţiuni de Fiziologie Ale Sistemului CardiovascularBaban VladÎncă nu există evaluări
- SomajulDocument8 paginiSomajulBaban VladÎncă nu există evaluări
- Ghid MotivatieDocument43 paginiGhid MotivatieAdriana Rau RabanÎncă nu există evaluări
- Eoliana ElectricaDocument139 paginiEoliana Electricaتيو تيودوراÎncă nu există evaluări
- Eoliana ElectricaDocument139 paginiEoliana Electricaتيو تيودوراÎncă nu există evaluări
- Tema Pome 2013Document11 paginiTema Pome 2013Baban VladÎncă nu există evaluări
- Harta Serviciilor Sociale ArgesDocument10 paginiHarta Serviciilor Sociale ArgesBaban VladÎncă nu există evaluări
- Subiecte PomeDocument12 paginiSubiecte PomeBaban VladÎncă nu există evaluări
- Capitolul 6.1 Calculul FazorialDocument11 paginiCapitolul 6.1 Calculul FazorialBaban VladÎncă nu există evaluări
- Reglare Producere Eritrocite Modelare Control MuscularDocument1 paginăReglare Producere Eritrocite Modelare Control MuscularBaban VladÎncă nu există evaluări
- Reglare Producere Eritrocite Modelare Control MuscularDocument1 paginăReglare Producere Eritrocite Modelare Control MuscularBaban VladÎncă nu există evaluări
- PowerDocument16 paginiPowerBaban VladÎncă nu există evaluări
- Subiecte PomeDocument12 paginiSubiecte PomeBaban VladÎncă nu există evaluări
- Proiectare Masina ElectricaDocument15 paginiProiectare Masina ElectricaBaban VladÎncă nu există evaluări
- Cursul Nr1Document4 paginiCursul Nr1Baban VladÎncă nu există evaluări
- Cursul Nr1Document4 paginiCursul Nr1Baban VladÎncă nu există evaluări
- Studiul Contactoarelor ElectromagneticeDocument6 paginiStudiul Contactoarelor ElectromagneticeConstantin FlorinÎncă nu există evaluări
- Eiem 1Document72 paginiEiem 1Baban VladÎncă nu există evaluări
- PMCDocument15 paginiPMCBaban VladÎncă nu există evaluări
- PMCDocument15 paginiPMCBaban VladÎncă nu există evaluări
- 5 - Masina SincronaDocument7 pagini5 - Masina SincronaNadgob UemsÎncă nu există evaluări
- 5 - Masina SincronaDocument7 pagini5 - Masina SincronaNadgob UemsÎncă nu există evaluări
- APF-S Active Paralel FilterDocument1 paginăAPF-S Active Paralel FilterBaban VladÎncă nu există evaluări
- 5 - Masina SincronaDocument7 pagini5 - Masina SincronaNadgob UemsÎncă nu există evaluări