PRINCIPALELEFUNCIIARPA
PRINCIPALELE
FUNCII ARPA
SIMULAREAMANEVREIDEEVITARE
NeculaiTATARU
�DEFINIII I TERMENI ARPA STANDARD
DEFINIIIITERMENIARPASTANDARD
Micarea predictibil aintei (Targets Predicted Motion)
reprezentarea pe ecranul radarului, prin extrapolare, a
micrii viitoare aintei pe baza msurrii de relevmente
i distane radar pentru un interval de timp stabilit de ctre
operator vectorul intei;
- vector real;
-vector relativ.
Trendul micrii intei (Targets Motion Trend) poziia
relativ
l ti sau adevrat
d t a intei
i t i n
trecut
t
t pentru
t un interval
i t
l
de timp stabilit de ctre operator: urma intei, ecoul intei,
etc ;
etc.;
- urme reale;
- urme relative
�Urmrirea intelor navale Funcia History
Urmrireaintelornavale.
Procesull de
P
d urmrire
i a intelor
i t l navale
l poate
t fi vizualizat
i li t la
l
cerere, sub forma a cel puin 4 poziii trecute succesive (past position),
sau prin vectori (vector history), pentru un interval de timp de opt
minute.
Poate fi afiat i pentru intervale de:
- 1-3 minute;;
- 10, 12 minute.
2 min
2 min
2 min
2 min
2 min
2 min
2 min
2 min
�Metode de simulare a manevrei de evitare
Metodedesimulareamanevreideevitare
Metoda vectorial cea mai utilizat n
prezent;
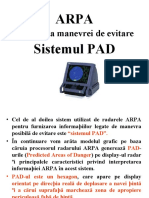
Metoda PAD pus la punct de ctre firma
Spery.
�CONSTRUCIA PAD PE PLANETA RADAR
Se determin drumul i viteza intei,CPA,TCPA,aspectul
Sedetermindrumuliviteza
intei CPA TCPA aspectul
�Sesimuleazoevitareprinschimbarededrum
ladreaptaistnga
Se determin nDN1,nD
SedeterminnD
nDN2,nTCPA
nTCPA1,nTCPA
nTCPA2
�SeprelungeteDA dincolodeA,senoteazcuA1 iA4,
intersciileDA cunDN1 inDN2
SegmentulA1A4 seimparten4priegale,cuA2 iA3
senoteazpuncteleapropiatedeA1 iA4
�nA2 iA3 setraseazdouperpendicularepeDA
PeacesteasedeterminpuncteleA2`,A2``,A3`,A3``,astfel
nct A2`A2= A2A2``= A3`A3= A3A3``=dsig
�SeconstruietePADunindpunctele
A1,A
A2`,A
A3`,A
A4, A3``,A
A3`, A
PPC
PeuneleradarepunctuldeinterseciaD
Pe
unele radare punctul de intersecia DN cuD
cu DA
senoteazcuPPC PunctulPrevizibildeColiziune
�Observaii
PPC nu este neaprat pe mijlocul segmentului A1A4;
PADul se utilizeaz pentru evitarea mai multor inte simultan; nu se construiete de
ctre ofierul de cart pe planet ci de ctre radarul ARPA pe ecran;
Pentru viteza navei mai mic dect viteza intei i o anumit poziie relativa a acesteia
fa de nava proprie, pot exista dou drumuri ale navei ce duc la coliziune i respectiv
dou variante de PAD;
Grafic
fi PADull poate fi reprezenatt sub
b forma
f
un hexagon
h
sau poate fi aproximat
i
l o
la
elips sau chiar la un cerc;
D
Drumul
l de
d evitare
it
nu trebuie
t b i s intersecteze
i t
t
PAD l niciunei
PADul
i i
i inte;
i t
Modificnd viteza sau dsig, se modific forma PADului.
�Utili area PA
UtilizareaPAD
or
ct
Se
DN1
pe
os
ul
ric
DN
DN2
�Modificarea PAD prin variaia vitezei
ModificareaPADprinvariaiavitezei
LamodificareavitezeinaveipropriisemodificPADul
DN
Reducerea vitezei
Creterea vitezei
�Modificarea PAD prin variaia distanei de siguran
ModificareaPADprinvariaiadistaneidesiguran
DN
�SimulareaManevreideEvitare
Sistemulvectorial
Sistemul
vectorial
FacilitateaTRIAL
�Simularea manevrei de evitare
cu radarul
d
l n
micare
i
relativ
l ti (RM)
Se presupune o situaie,
situaie la un moment dat t0, la care ss
au detectat dou inte n sectorul prova, ce au fost
achiziionate.
achiziionate
Radarul ARPA asigur urmrirea automat a intelor,
d i odat
deci
d t achiziionate,
hi ii t
i t l vor fi continuu
intele
ti
urmrite, i datele referitoare la traiectoriile lor
actualizate
t li t automat.
t
t
Datele referitoare la inte vor fi afiate la cerere, iar pe
ecran vor vectorii corespunztori micrii relative
iniiale ale celor dou inte
� Dup ce inta a fost selectat i este evident c ea va
genera o situaie de foarte mare apropiere se trece la
etapa de simulare a manevrei de evitare:
se verific mai nti dac vectorul intelor este vector relativ
sau adevrat. Simularea se face cu vector relativ;
se lanseaz facilitatea de simulare pentru a vedea ce manevr
de evitare s-ar putea efectua pentru a evita inta cea mai
periculoas;
apare pe ecran un mesaj ce avertizeaz operatorul c este n
curs o operaiune de simulare a unei manevre (de exemplu
TRIAL).
din centrul imaginii radar (care reprezint poziia navei
proprii) va apare un vector orientat de direcia DN i de
lungime egal cu spaiul parcurs de nava proprie cu VN n
intervalul de timp setat la radar (vectorul navei proprii).
�Date setate de operator pentru simulare i
determinarea manevrei de evitare optime
intervalul de timp pn la nceperea manevrei
(Delay);
drumul de evitare (nDN);
viteza de evitare (nVN).
�ALGORITM DE OPERAII:
stabilirea distanei de siguran dorite cu ajutorul unui
VRM cu centru n p
poziia
navei p
proprii;
p
stabilirea intervalului de timp n minute pn la
nceperea manevrei.
pe ecran, pentru intele plotate se va afia punctul
unde se afl inta n prezent i ntro
ntr o nou poziie,
poziie
corespunztoare poziiei estimate a intelor n
momentul nceperii manevrei.
manevrei
�Simularea manevrei de evitare p
propriu-zise,
p
, prin
p
modificarea parametrilor de micare ai navei proprii
n funcie de condiiile reale existente se vor ncerca
variantele de evitare n succesiunea:
schimbarededrumlaTb;
reducereavitezei;
schimbarededrumlaBd;
creterea vitezei.
Cnd vectorul relativ al intei care trebuie evitat a
ajuns tangent la cercul de siguran se pot citi valorile
referitoare la nDN i/sau la nVN .
�Declanarea efectiv a manevrei de evitare
dup scurgerea intervalului de timp (Delay):
Evoluia intei trebuie urmrit att vizual (dac este
posibil) ct i pe radar,
radar pentru a se observa dac
soluia dat de ARPA este viabil.
Orice dubiu privind soluia gsit cu ajutorul sistemului
ARPA trebuie corelat cu situaia real, putnduse
modifica parametrii manevrei de evitare funcie de
necesitile momentului.
�Course 70
Speed 15 KNT
Vector (R)
12 min.
Target Data
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 305
Speed 12 KNT
CPA 0.2 NM
TCPA 22 min
�Course 70
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
Delay = 0 min
Course = 070
Speed = 15 KNT
TRIAL
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 305
Speed
p
12 KNT
CPA 0.2 NM
TCPA 22min
�Course 70
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
06 min
Delay = 00
Course = 070
Speed = 15 KNT
TRIAL
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 305
Speed
p
12 KNT
CPA 0.2 NM
TCPA 19 min
�Course 70
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
06 min
Delay = 00
Course
090
Course == 060
105
120
Speed = 15 KNT
TRIAL
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 305
Speed
p
12 KNT
CPA 0.2 NM
TCPA 19min
�Course 70
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
Delayy == 00
03
min
06
Delay
00 min
Course
090
Course == 060
105
120
Speed = 15 KNT
TRIAL
TargetNo.2
No.2
Target
BRG95
95(T)
(T)
BRG
DIST4.0
8.7NM
NM
DIST
Course305
280
Course
Sped
p 12 KNT
Speed
CPA0.2
0.2NM
NM
CPA
TCPA06
13min
min
TCPA
�Course
090
Course 70
120
105
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
Delayy == 00
03
min
06
Delay
00 min
Course
090
Course == 060
105
120
Speed = 15 KNT
TRIAL
TargetNo.2
No.2
Target
BRG92
95(T)
(T)
BRG
DIST3.8
4.0NM
NM
DIST
Course305
280
Course
Speed
p 12
12KNT
KNT
Speed
CPA1.6
0.2NM
NM
CPA
TCPA05
06min
min
TCPA
�Monitorizarea desfurrii manevrei de evitare
Revenirea la parametrii iniiali de micare
D
Dup declanarea
d l
manevreii de
d evitare,
it
situaia
it i trebuie
t b i
urmrit n continuare, pentru a se observa dac
soluia simulat corespunde realitii;
Dac nu exist alte nave n vecintate,, ncheierea
manevrei de evitare se poate face conform soluiilor
de radar plotting.
plotting
Dac exist ns alte nave n apropiere, este bine ca
ofierul
fi
l de
d cart s se asigure
i
c revenirea
i
l parametriiii
la
iniiali de micare nu va genera o situaie de foarte
mare apropiere cu o alt nav.
�Revenirea la parametrii iniiali de micare:
Verificarereveniriinsiguranlaparametriiiniialide
g
micareseface,utilizndtotfacilitateadesimularea
manevrelor:
seploteazinteleaflatenapropiereanavei proprii;
sefixeazunVRMlavaloareadistaneidesiguran;
fi
VRM l
l
di t i d i
selanseazfunciadesimulare;
sefixeazdelayullavaloareaindicatnfereastraTARGET
DATApentruTCPA celmaimicaluneiadintreinte.
pe ecran vor fi afiate poziiile estimate ale intelor
de valoarea delayului,
y
, cu vectorii
funcie
corespunztori;
�Revenirea la parametrii iniiali de micare:
valorile iniiale pentru parametrii de mar ai navei proprii sunt
cele
l corespunztoare
manevreii de
d evitare
i
( N, nVN);
(nD
)
se introduc parametrii de mar iniiali ai navei proprii (DN, VN) ca
parametrii de evitare
e itare n noua
no a situaie
sit aie simulat;
sim lat
se observ orientarea vectorilor relativi ai intelor aflate n
apropiere pentru a se putea aprecia dac intersecteaz sau nu
apropiere,
cercul de siguran.
n cazul n care un astfel de lucru se ntmpl,
ntmpl nseamn c
trebuie ntrziat ncheierea manevrei de evitare.
pentru a determina p
peste cte minute se p
poate ncheia manevra
p
de evitare, se va mri valoarea delayului, pn cnd se constat
c vectorii relativi ai intelor nu mai intersecteaz cercul de
siguran.
�Course 70
120
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
Delay = 05 min
Course = 120
Speed = 15 KNT
TRIAL
Target No.2
BRG 75 (T)
DIST 2.0 NM
Course 280
Speed
p
12 KNT
CPA 1.6 NM
TCPA 05 min
�Course 70
120
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
Delay = 05 min
Course = 120
070
Speed = 15 KNT
TRIAL
Target No.2
BRG 75 (T)
DIST 2.0 NM
Course 280
Speed
p
12 KNT
CPA 1.6 NM
TCPA 05 min
�Simulareamanevreideevitarecuradaruln
micare real (TM)
micarereal(TM)
Simularea manevrei de evitare cu radarul n micare
reala este posibil dar neindicat;
Activnd modul de simulare, pe ecran va fi afiat i
vectorul de micare pentru nava proprie, funcie de
drumul i viteza iniial a navei proprii;
Valorile respective apar i n fereastra cu datele pentru
simularea manevrei.
�TM
Course 70
Speed 15 KNT
Vector (T)
12 min.
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 305
Speed 12 KNT
CPA 0.2 NM
TCPA 22 min
�Course 70
Speed 15 KNT
Vector (T)
12 min.
TM
C UP
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 305
Speed 12 KNT
CPA 0.2 NM
TCPA 22 min
� Seseteaz DELAYullaoanumitvaloare(6
minute);
);
Peecranulradar,originilevectorilorsau
deplasatnpoziiileestimatealenavelor int
duptrecereaintervaluluidetimprespectiv;
p
p p
;
nmicarereal,origineavectoruluipentru
navaproprieestedeplasat,corespunztor
p
poziieiestimatepecareovaaveanavaproprie
p
p p
pesteacelaiintervaldetimp(6minute).
�TM
Course 70
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
Delay = 06 min
Course = 070
Speed = 15 KNT
TRIAL
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 305
Speed 12 KNT
CPA 0.2 NM
TCPA 22 min
� n imaginea
i
i
radar
d prezentat n
micare
i
real,
l singurul
i
l lucru
l
care indic grafic c exist o situaie periculoas este faptul c
vectorul navei proprii intersecteaz vectorul de micare real al
intei .
Ofierul de cart, avnd suficient spaiu de manevr, decide c
evitarea va trebui efectuat printro schimbare de drum la
tribord.
Verificarea nCPAului rezultat n urma simulrii se poate estima
cu ajutorul unui ERBL.
Dup prezentarea acestui exemplu, se oserv clar c cea mai
bun informaie referitoare la soluia de evitare se obine chiar
ii n
cazull radarelor
d l ARPA tot
t t n
micare
i
relativ.
l ti
�TM
Course 70
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
Delay = 06 min
Course = 120
070
Speed = 15 KNT
TRIAL
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 305
Speed 12 KNT
CPA 0.2 NM
TCPA 22 min
�TM
Course 70
Speed 15 KNT
Vector (R)
12 min.
Trial Manoeuvre
Delay = 06 min
Course = 120
070
Speed = 15 KNT
TRIAL
Target No.2
BRG 95 (T)
DIST 8.7 NM
Course 280
Speed 12 KNT
CPA 0.2 NM
TCPA 18 min
�ROLULRADARULUIANTICOLIZIUNE
NLUAREADECIZIEINMANEVRADEEVITARE
Pentru a nelege rolul radarului anticoliziune n luarea unei bune
decizii n manevra de evitare a coliziunilor pe mare este necesar analiza
etapelor deciziei, astfel:
1 obiectivul deciziei conducerea n siguran a navei;
1.
2. informarea realizat printro veghe permanent auditiv i vizual, de
ctre personalul de cart de pe comanda navei, prin toate mijloacele:
organele de sim;
echipamentele de navigaie;
3. analiza i prelucrarea informaiilor prin metode diferite, de exemplu, prin
compararea valorii relevmentului cu valoarea relevmentului final sau prin
compararea valorii distanei iniiale cu cea a distanei minime (CPA), pentru a
se putea determina situaiile periculoase, periculoase n timp, nepericuloase;
4 existena mai multor variante de decizie evitarea coliziunii prin diferite
4.
procedee;
�ROLULRADARULUIANTICOLIZIUNE
NLUAREADECIZIEINMANEVRADEEVITARE
5. alegerea
5
l
variantei
i t i optime
ti
d decizie
de
d i i luarea
l
considerare
n
id
a tuturor factorilor care influeneaz decizia, factorii externi,
experiena personal, respectarea legislaiei, etc.;
6. luarea deciziei alegerea modalitii de punere n aplicare a
deciziei:
prin viu grai,
grai comand la timonier;
aciune direct asupra timonei i a telegrafului;
prin semn;
n scris.
7. controlul i corecia deciziei realizarea comparaiei ntre
parametrii de poziie i de evitare calculai i cei reali,
obinnduse elementele necesare coreciei, dup caz, a
manevrei.
�Analiza situaiei
Analizasituaiei
Analiza
A
li situaiei
it i i de
d navigaie
i i n
luarea
l
d i i i de
deciziei
d
evitare
a
coliziunilor
presupune
cunoaterea
urmtoarelor elemente:
caracteristicile fizicogeografice ale zonei de navigaie:
lrgime;
adncimi;
pericole de navigaie;
restricii:
t i ii
valoarea traficului maritim n zon;
calitile manevriere ale navei;
calitile personale i pregtirea
personalului de cart.
profesional