S-ar putea să vă placă și
- Lect 1 TSADocument9 paginiLect 1 TSAMăriuţăRareşÎncă nu există evaluări
- Schema Bloc A Unui Sistem de Reglare Automat (Sra)Document3 paginiSchema Bloc A Unui Sistem de Reglare Automat (Sra)Daniel100% (4)
- Sisteme de Reglare AutomataDocument12 paginiSisteme de Reglare AutomataRobert CutovÎncă nu există evaluări
- Dictionar AutomatizariDocument58 paginiDictionar AutomatizariBogdan-iulian BalintÎncă nu există evaluări
- Amplificatoare ElectroniceDocument19 paginiAmplificatoare ElectroniceZisu CorneliuÎncă nu există evaluări
- Micromotor Control LiniarDocument19 paginiMicromotor Control LiniarRusu CristianÎncă nu există evaluări
- Slide Curs9 TRA 2006Document11 paginiSlide Curs9 TRA 2006Marius SicuÎncă nu există evaluări
- Curs - Ingineria Reglarii AutomateDocument36 paginiCurs - Ingineria Reglarii Automatenumer_nine99Încă nu există evaluări
- Notiuni Generale de Automatizare Ciberne PDFDocument13 paginiNotiuni Generale de Automatizare Ciberne PDFAdrian Anghel100% (1)
- Test ESRADocument11 paginiTest ESRARazvan SavucÎncă nu există evaluări
- Capitol 3Document50 paginiCapitol 3Pan De LaÎncă nu există evaluări
- XX Pompe Si Distribuitoare HidrauliceDocument16 paginiXX Pompe Si Distribuitoare Hidraulicerusalin.lucian.paunÎncă nu există evaluări
- Scopul LucrăriiDocument3 paginiScopul Lucrăriin32463666Încă nu există evaluări
- ESCA - Principii de ReglareDocument5 paginiESCA - Principii de ReglareRazvan MorariuÎncă nu există evaluări
- Item 170 - Reglarea Nivelului Apei Într-Un Rezervor Folosind Un Regulator PIDDocument28 paginiItem 170 - Reglarea Nivelului Apei Într-Un Rezervor Folosind Un Regulator PIDCosminDaniel MihaiÎncă nu există evaluări
- C1 - Introducere În Sistemele Numerice de ComandăDocument9 paginiC1 - Introducere În Sistemele Numerice de ComandăCatalin ConduracheÎncă nu există evaluări
- CURS 12 BSA-Regulatoare AutomateDocument10 paginiCURS 12 BSA-Regulatoare AutomateMatei AlexandruÎncă nu există evaluări
- TTM 4 14Document53 paginiTTM 4 14Ionela PintilieÎncă nu există evaluări
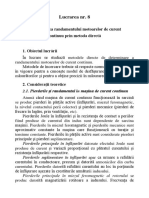
- L 8 - Determinarea Randamentului MCC - Metoda DirectaDocument7 paginiL 8 - Determinarea Randamentului MCC - Metoda DirectaViorica MereoaraÎncă nu există evaluări
- C4. TahogeneratoareDocument22 paginiC4. TahogeneratoareTunsoiu NicolaeÎncă nu există evaluări
- Laborator NR 4 Si 5 ESNDocument23 paginiLaborator NR 4 Si 5 ESNBarbuÎncă nu există evaluări
- Elemente de ExecutieDocument21 paginiElemente de ExecutieLeustean RobertÎncă nu există evaluări
- L 10 - Determinarea Zonei de Comutatie Fara Scantei MCCDocument7 paginiL 10 - Determinarea Zonei de Comutatie Fara Scantei MCCViorica MereoaraÎncă nu există evaluări
- Laborator EEEARDocument12 paginiLaborator EEEARAlex DaisaÎncă nu există evaluări
- Masurare EnergieDocument36 paginiMasurare EnergieCatalin GheorghiuÎncă nu există evaluări
- AO2Document12 paginiAO2Marian MarinÎncă nu există evaluări
- Capitolul 4 Sisteme de Reglare AutomataDocument13 paginiCapitolul 4 Sisteme de Reglare AutomataIonela Vintilă100% (1)
- Referat SRADocument4 paginiReferat SRAAlex Pop100% (2)
- L07 - Reglarea Vitezei Unui SAE Cu MCC SERIE Prin Tensiune Si FluxDocument3 paginiL07 - Reglarea Vitezei Unui SAE Cu MCC SERIE Prin Tensiune Si FluxpavelpopescuÎncă nu există evaluări
- Senzori de TemperaturaDocument28 paginiSenzori de TemperaturaAndreiValentinÎncă nu există evaluări
- Proiect SAEDocument22 paginiProiect SAEFlorin BrandiuÎncă nu există evaluări
- Stabilizatoare de PutereDocument6 paginiStabilizatoare de Putereandrei puiuÎncă nu există evaluări
- Indrumar Proiect Actionari ElectriceDocument17 paginiIndrumar Proiect Actionari ElectriceIordan Dan FfnÎncă nu există evaluări
- Lucrarea 7Document8 paginiLucrarea 7nelucu77Încă nu există evaluări
- Masina de CC - Cap1, 2Document22 paginiMasina de CC - Cap1, 2Liviu PaianuÎncă nu există evaluări
- Tema 2Document7 paginiTema 2mihaiÎncă nu există evaluări
- LABORATOR 2 Masini ElectriceDocument5 paginiLABORATOR 2 Masini ElectriceHelen FlorescuÎncă nu există evaluări
- Tsi 1Document7 paginiTsi 1Manzareanu AndreiÎncă nu există evaluări
- LAE3Document9 paginiLAE3Brindusesc DanyelaÎncă nu există evaluări
- Traductoare de Pozitie Si DeplasareDocument11 paginiTraductoare de Pozitie Si DeplasareRazvan ZahariaÎncă nu există evaluări
- Măsurarea Energiei Electrice Active În Circuite Monofazate de Curent AlternativDocument8 paginiMăsurarea Energiei Electrice Active În Circuite Monofazate de Curent AlternativToma EduardÎncă nu există evaluări
- Elem de ExecutieDocument21 paginiElem de ExecutieAlina Elena0% (1)
- Automatizarea Masinilor Si InstalatiilorDocument27 paginiAutomatizarea Masinilor Si InstalatiilorCeclan David BogdanÎncă nu există evaluări
- Elem de ExecutieDocument25 paginiElem de Executiebitulescu2444Încă nu există evaluări
- Tot PT Exam Bae PDFDocument284 paginiTot PT Exam Bae PDFMădălin100% (1)
- Comanda Vectoriala - SincronDocument9 paginiComanda Vectoriala - SincronAlexandru FrățilăÎncă nu există evaluări
- Elemente de Executie Utilizate in SRADocument23 paginiElemente de Executie Utilizate in SRAMarian Nicolae AnghelÎncă nu există evaluări
- Regulatoare AutomateDocument23 paginiRegulatoare AutomateSorin CosminÎncă nu există evaluări
- Stand de TestareDocument8 paginiStand de TestareAndra AndrutzaÎncă nu există evaluări
- Servomecanisme Curs (Dobra Remus)Document174 paginiServomecanisme Curs (Dobra Remus)dumetriiÎncă nu există evaluări
- Caracteristicile Motoarelor de Curent ContinuuDocument18 paginiCaracteristicile Motoarelor de Curent ContinuuPopa Ionut-CristianÎncă nu există evaluări
- Stabilizatoare Integrate Si Aplicatiile AcestoraDocument22 paginiStabilizatoare Integrate Si Aplicatiile AcestoraSofia DobromirÎncă nu există evaluări
- Îndrumar MCCDocument83 paginiÎndrumar MCCBateria 77Încă nu există evaluări
- Pentru Cursul 4Document3 paginiPentru Cursul 4Bateria 77Încă nu există evaluări
- Componenta ComisieiDocument1 paginăComponenta ComisieiBateria 77Încă nu există evaluări
- L6 Materiale NeferoaseDocument36 paginiL6 Materiale NeferoaseBateria 77Încă nu există evaluări
- Lucrarea Nr. 10Document51 paginiLucrarea Nr. 10Bateria 77Încă nu există evaluări
- Curs TsaDocument121 paginiCurs TsaBateria 77Încă nu există evaluări
- Determinarea Vitezei Sunetului În Aer Prin Metoda Interferometriei Cu Ajutorul Tubului KönigDocument3 paginiDeterminarea Vitezei Sunetului În Aer Prin Metoda Interferometriei Cu Ajutorul Tubului Königdeyutzu26Încă nu există evaluări
- Liebherr Hs 885 HD Duty Cycle Crawler Crane Data Sheet Specifications English - 10099246 - 2010Document16 paginiLiebherr Hs 885 HD Duty Cycle Crawler Crane Data Sheet Specifications English - 10099246 - 2010Bateria 77Încă nu există evaluări
- Curs Mașini ElectriceDocument100 paginiCurs Mașini ElectriceBateria 77Încă nu există evaluări
- E C Matematica M Tehnologic 2014 Var 07 LRO PDFDocument1 paginăE C Matematica M Tehnologic 2014 Var 07 LRO PDFMeditaţii Matematică Craiova100% (1)
- Ii 9Document6 paginiIi 9Bateria 77Încă nu există evaluări
- E A Romana Real Tehn 2020 Test 01 PDFDocument2 paginiE A Romana Real Tehn 2020 Test 01 PDFPopÎncă nu există evaluări
- W190BDocument16 paginiW190BBateria 77Încă nu există evaluări
- E A Romana Real Tehn 2021 Test 05Document2 paginiE A Romana Real Tehn 2021 Test 05Adrian Ciprian TimofteÎncă nu există evaluări
- Caiet de Laborator-FizicăDocument188 paginiCaiet de Laborator-FizicăBateria 77Încă nu există evaluări
- Determinarea Ph-Ului Solutiilor ApoaseDocument7 paginiDeterminarea Ph-Ului Solutiilor ApoaseBateria 77Încă nu există evaluări
- TestDocument4 paginiTestBateria 77Încă nu există evaluări
- Analiza Calitativa A ApeiDocument6 paginiAnaliza Calitativa A ApeiBateria 77Încă nu există evaluări
- Determinarea Duritatii ApeiDocument4 paginiDeterminarea Duritatii ApeiBateria 77Încă nu există evaluări
- Determinarea Ph-Ului Solutiilor ApoaseDocument7 paginiDeterminarea Ph-Ului Solutiilor ApoaseBateria 77Încă nu există evaluări
- Testament PDFDocument2 paginiTestament PDFBateria 77Încă nu există evaluări
- E A Romana Real Tehn 2020 Test 01 PDFDocument2 paginiE A Romana Real Tehn 2020 Test 01 PDFPopÎncă nu există evaluări
- Caiet de Laborator-FizicăDocument188 paginiCaiet de Laborator-FizicăBateria 77Încă nu există evaluări
- Analiza Calitativa A ApeiDocument6 paginiAnaliza Calitativa A ApeiBateria 77Încă nu există evaluări
- Costache Negruzzi - Al. LapusneanuDocument11 paginiCostache Negruzzi - Al. Lapusneanugeorgiana89% (45)
- Anexă - Modele Documente FrigotehnistDocument15 paginiAnexă - Modele Documente FrigotehnistBateria 77Încă nu există evaluări
- Costache Negruzzi - Al. LapusneanuDocument11 paginiCostache Negruzzi - Al. Lapusneanugeorgiana89% (45)
- Costache Negruzzi - Al. LapusneanuDocument11 paginiCostache Negruzzi - Al. Lapusneanugeorgiana89% (45)
- Ultima Noapte de Dragoste Intaia Noapte de RazboiDocument338 paginiUltima Noapte de Dragoste Intaia Noapte de Razboialexatiger80% (5)