S-ar putea să vă placă și
- Mircea Nastasoiu - Aspecte Generale Privind Transmisia TractoarelorDocument8 paginiMircea Nastasoiu - Aspecte Generale Privind Transmisia TractoarelorVladMartisÎncă nu există evaluări
- Cuplarea Masinilor Agricole La Tractor.Document13 paginiCuplarea Masinilor Agricole La Tractor.victor nistor100% (1)
- Sutidu de Caz Cca2, Caseta de DirectieDocument7 paginiSutidu de Caz Cca2, Caseta de DirectieCosmyn CojocaruÎncă nu există evaluări
- Mecanisme de Putere Ale Puntilor MotoareDocument37 paginiMecanisme de Putere Ale Puntilor Motoaregeorgehent0% (1)
- Model Cutie 1Document57 paginiModel Cutie 1Tudor CostinÎncă nu există evaluări
- Instructiuni de Lucru Si Protectia Muncii La Atelierul Service MecanicDocument6 paginiInstructiuni de Lucru Si Protectia Muncii La Atelierul Service MecanicAnne MoonÎncă nu există evaluări
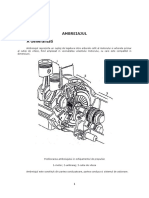
- AmbreiajDocument17 paginiAmbreiajDragan AlexandruÎncă nu există evaluări
- Transmisii MecaniceDocument12 paginiTransmisii MecaniceblackembadÎncă nu există evaluări
- 0.d. Tot Tot Actual AmbreiajulDocument63 pagini0.d. Tot Tot Actual AmbreiajulciurtecarmensilviaÎncă nu există evaluări
- Proiect de Tehnologie DidacticaDocument4 paginiProiect de Tehnologie DidacticaAnonymous pn6VnEÎncă nu există evaluări
- Ambreiajul MecanicDocument8 paginiAmbreiajul Mecanic92zap92Încă nu există evaluări
- 210 Fisa 10 - Cutia de VitezeDocument1 pagină210 Fisa 10 - Cutia de VitezeCasey SimpsonÎncă nu există evaluări
- Dizertatia3 ZahariaDocument46 paginiDizertatia3 ZahariaLucrari de DiplomaÎncă nu există evaluări
- Lucrari de Laborator Îndrumar Metodic AutomobileDocument28 paginiLucrari de Laborator Îndrumar Metodic AutomobileRem DiggaÎncă nu există evaluări
- Capitolul 4 - Transmisia TractoruluiDocument14 paginiCapitolul 4 - Transmisia TractoruluiEduard.0% (1)
- Luc5 PDFDocument23 paginiLuc5 PDFAlynÎncă nu există evaluări
- Organe de MasiniDocument85 paginiOrgane de MasiniCristina Stirbu0% (1)
- Asamblari Cu Elemente ElasticeDocument10 paginiAsamblari Cu Elemente ElasticeTomescu Madalin100% (1)
- Montarea, Intretinerea Si Detectarea Defectelor Instalatiilor PneumaticeDocument4 paginiMontarea, Intretinerea Si Detectarea Defectelor Instalatiilor PneumaticeBogdanÎncă nu există evaluări
- Mu 19Document11 paginiMu 19Ionescu EdwardÎncă nu există evaluări
- Proiect Optimizarea Exploatarii EchipamentelorDocument16 paginiProiect Optimizarea Exploatarii EchipamentelorGeorge BeldieÎncă nu există evaluări
- Operatii de Intretinere A AutomobilelorDocument17 paginiOperatii de Intretinere A AutomobilelorRamona CorneaÎncă nu există evaluări
- Plan de Lectie SechitaDocument10 paginiPlan de Lectie SechitadncdanielaÎncă nu există evaluări
- Fisa Tehnologica de ReparatieDocument10 paginiFisa Tehnologica de ReparatieAlexandru HoraicuÎncă nu există evaluări
- Masini Si Instalatii Pentru Manipularea MarfurilorDocument15 paginiMasini Si Instalatii Pentru Manipularea MarfurilorMafy20Încă nu există evaluări
- Reductor OrizontalDocument35 paginiReductor OrizontalSebastian MorarÎncă nu există evaluări
- Cutia de VitezeDocument2 paginiCutia de VitezeLucretia DumitrasÎncă nu există evaluări
- Lucrare de Laborator NR 1.Document21 paginiLucrare de Laborator NR 1.Nicolae BivolÎncă nu există evaluări
- Proiect DidacticDocument5 paginiProiect Didacticjocurile lui AntoÎncă nu există evaluări
- T 2 - 3. Mecanismul de Distribuţie. - 1666897451Document3 paginiT 2 - 3. Mecanismul de Distribuţie. - 1666897451DinaizerÎncă nu există evaluări
- Fisa de Lucru Lagare Cu AlunecareDocument1 paginăFisa de Lucru Lagare Cu Alunecarenefinita atinifenÎncă nu există evaluări
- Transmisie Prin Curele-Roti Cu FrictiuneDocument29 paginiTransmisie Prin Curele-Roti Cu Frictiunecaty2Încă nu există evaluări
- XI - Transmisii Mec Si Mecanisme - profBudileanuA2Document2 paginiXI - Transmisii Mec Si Mecanisme - profBudileanuA2Ghita-Mehedintu Gheorghe100% (1)
- Laborator 5Document7 paginiLaborator 5Bogdan GorceaÎncă nu există evaluări
- Mecanisme 2012 PetrescuDocument305 paginiMecanisme 2012 PetrescuCrisanViorel100% (1)
- Proiect de DiplomaDocument21 paginiProiect de DiplomacolibabaÎncă nu există evaluări
- Curs 05 Mecanisme ITIMMIAIA 2016 PDFDocument50 paginiCurs 05 Mecanisme ITIMMIAIA 2016 PDFRadu Boeriu100% (1)
- Strung NormalDocument4 paginiStrung NormalCioboata FlorinÎncă nu există evaluări
- Verif Jocurilor Mec DistributieDocument21 paginiVerif Jocurilor Mec DistributieCatalina Vasile100% (1)
- Atestat Montarea Grupului PropulsorDocument14 paginiAtestat Montarea Grupului PropulsorManeaRebecca100% (1)
- Curs-2 Ingineria FabricațieiDocument21 paginiCurs-2 Ingineria FabricațieiCristian IakabÎncă nu există evaluări
- 3l Carte Teh Masina de Frezat Metale FVV 125pd RomDocument41 pagini3l Carte Teh Masina de Frezat Metale FVV 125pd RomAdam LuminiţaÎncă nu există evaluări
- Automobile Și TractoareDocument17 paginiAutomobile Și TractoareCodreanu PetruÎncă nu există evaluări
- Fra ProiectDocument13 paginiFra ProiectRoobby RooByyÎncă nu există evaluări
- Cutia de Viteze Automată Cu Mecanisme PlanetareDocument14 paginiCutia de Viteze Automată Cu Mecanisme PlanetareBURLACU IULIAN100% (1)
- Cap de BaraDocument3 paginiCap de BaraIoniță Sorin CristianÎncă nu există evaluări
- Desenul de AnsambluDocument6 paginiDesenul de AnsambluSamuelucaÎncă nu există evaluări
- Angrenajelor Cu Roti Dințate Cilindrice, Cu Exemplificarea Pe o Cutie de VitezeDocument28 paginiAngrenajelor Cu Roti Dințate Cilindrice, Cu Exemplificarea Pe o Cutie de VitezePopoviciu AlinÎncă nu există evaluări
- Roti Cu FrictiuneDocument5 paginiRoti Cu FrictiuneDragomir MarianÎncă nu există evaluări
- MentenantaDocument71 paginiMentenantaBogdan MalaceÎncă nu există evaluări
- Cric SimpluDocument5 paginiCric SimpluPaun DanielaÎncă nu există evaluări
- Asamblari CaneluriDocument7 paginiAsamblari CaneluriOtarasanuAdrianÎncă nu există evaluări
- Distribuitoare Hidraulice-2006Document35 paginiDistribuitoare Hidraulice-2006Teodor PopescuÎncă nu există evaluări
- Biblioteca MecanismeDocument9 paginiBiblioteca Mecanismecasile85100% (1)
- Test 13 - Sistemul de DirectieDocument1 paginăTest 13 - Sistemul de DirectieEly RotaruÎncă nu există evaluări
- Planificare m3 Organe de MasiniDocument4 paginiPlanificare m3 Organe de MasiniEugenia StroeÎncă nu există evaluări
- Fiabilitatea Sistemelor TehnologiceDocument25 paginiFiabilitatea Sistemelor TehnologiceAlina LauraÎncă nu există evaluări
- Curs Trans HidrodinamiceDocument16 paginiCurs Trans HidrodinamiceMuresan Mihai-AlexandruÎncă nu există evaluări
- Curs1 SchemeCinematice 1 MergedDocument49 paginiCurs1 SchemeCinematice 1 MergedSynbed100% (1)
- Scheme Cinematice TractoareDocument8 paginiScheme Cinematice Tractoarenifedan100% (2)
- Examen CCaDocument6 paginiExamen CCaSweet 4EverÎncă nu există evaluări
- Cursuri Pcmai2 PDFDocument511 paginiCursuri Pcmai2 PDFSweet 4EverÎncă nu există evaluări
- ACBS Informare Lansare Burse Acord Bilateral Unilaterale 2022Document1 paginăACBS Informare Lansare Burse Acord Bilateral Unilaterale 2022Sweet 4EverÎncă nu există evaluări
- Desen de Executie Arb IntrDocument1 paginăDesen de Executie Arb IntrSweet 4EverÎncă nu există evaluări
- Calcul Tractor 8+2trepte - Barascu Octavian Marian - Grupa1172ARDocument6 paginiCalcul Tractor 8+2trepte - Barascu Octavian Marian - Grupa1172ARTaviÎncă nu există evaluări