Documente Academic
Documente Profesional
Documente Cultură
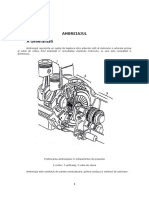
Mecanisme de Putere Ale Puntilor Motoare
Încărcat de
georgehentDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Mecanisme de Putere Ale Puntilor Motoare
Încărcat de
georgehentDrepturi de autor:
Formate disponibile
5.
MECANISMELE DE PUTERE ALE PUNTII MOTOARE
5.1 GENERALITATI
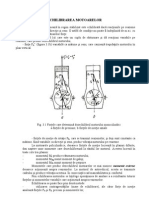
Rotile automobilului, in functie de natura si de marimea fortelor si momentelor
care actioneaza asupra lor, pot fi (figura 5.1):
Fig. 5.1 Clasificarea roilor dup solicitrile la care sunt supuse
- rotile motoare ( antrenate ): sunt rotile care ruleaza sub actiunea fluxului de
putere primit prin intermediul transmisiei de la motorul automobilului;
- rotile libere ( conduse ): sunt rotile care ruleaza sub actiunea unei forte de
impingere sau tragere, de acelasi sens de acelasi sens cu sensul vitezei de
deplasare a automobilului, exercitata asupra lor de cadrul sau caroseria
automobilului;
- rotile franate: sunt rotile care ruleaza sub actiunea unui moment de franare
dezvoltat in mecanismele de franare ale rotilor ( franare activa ), sau de catre
grupul motopropulsor in regim de mers antrenat ( frana de motor ).
Pentru automobilele, prevazute cu doua punti, organizarea tractiunii se poate
realiza dupa solutiile 4x2 sau 4x4, prima cifra indicand numarul rotilor iar cea de-a
doua pe cel al rotilor motoare. Pentru organizarea tractiunii de tipul 4x2, puntea
motoare poate fi dispusa in fata sau in spate, iar pentru tipul 4x4 ambele punti sunt
cu roti motoare.
Puntile motoare, fata de cele nemotoare, asigura transferul fluxului de putere
pentru autopropulsare, functie de modul de organizare a tractiunii, de la arborele
secundar al cutiei de viteze sau de la transmisia longitudinala, la rotile motoare.
De-a lungul acestui transfer, fluxul de putere sufera o serie de adaptari si anume:
Roi pentru
automobile
Roi motoare Roi libere Roi frnate
- adaptare geometrica determinata de pozitia relativa dintre planul in care se
roteste arborele cotit al motorului si planul in care se rotesc rotile motoare;
- adaptare cinematica determinata de asigurarea rapoartelor de transmitere
necesare transmisiei automobilului;
- divizarea fluxului de putere primit in doua ramuri, cate unul transmis
fiecareia dintre rotile motoare ale puntii.
Pentru a-si indeplini functiile de mai inainte mecanismele fluxului de putere din
puntea motoare cuprind: transmisia principala (sau angrenajul principal),
diferentialul si transmisiile la rotile motoare.
In procesul autopropulsarii, din interactiunea rotilor motoare cu calea, iau
nastere forte si momente de reactiune. Puntea are rolul de a prelua toate aceste
forte si momente si de a le transmite elementelor elastice ale suspensiei si cadrului
sau caroseriei automobilului. Preluarea fortelor si a momentelor, precum si
transmiterea lor dupa directii rigide cadrului sau caroseriei automobilului, se face
de ctre un ansamblu constructiv al puntii, numit mecanismul de ghidare al rotilor.
Mecanismul de ghidare defineste, in ansamblul puntii, cinematica rotii suspendate
elastic prin intermediul suspensiei. Se definesc astfel puntile rigide, ca fiind puntile
la care prin oscilatia unei roti fata de caroserie pozitia relativa dintre roti ramane
nemodificata ( punti cu oscilatia dependenta a rotilor ), si puntile articulate, puntile
la care oscilatia unei roti fata de caroserie determina modificarea pozitiei relative
dintre rotile puntii ( punti cu roti independente ).
Legatura in punte dintre mecanismele fluxului de putere si mecanismul de
ghidare se face in butucul rotii.
5.2 TRANSMISIA PRINCIPALA
Transmisia principala cuprinde toate mecanismele din punte care realizeaza o
demultiplicare a turatiei motorului.
Rolul transmisiei principale este de a mari momentul motor primit de la
transmisia longitudinala sau de la arborele primar al cutiei de viteze si de a-l
transmite, prin intermediul diferentialului si arborilor planetari, la rotile motoare,
ce se rotesc in jurul unei axe dispuse sub un unghi de 90 fata de axa longitudinala
a automobilului.
Amplificarea momentului motorului, cu un raport de transmitere de regula
constant, numit raportul de transmitere al puntii motoare ( notat io ), care reprezinta
adaptarea cinematica necesara impusa de conlucrarea motor - transmisie. Pentru a
realiza aceasta functie, prin constructie transmisiile principale sunt sunt mecanisme
de tipul angrenajelor. La microbuze, la care valoarea necesara a raportului de
transmitere este cuprinsa in intervalul de valori 35, transmisia principala este
constituita dintr-un singur angrenaj. Astfel de transmisii principale se numesc
transmisii principale simple.
Adaptarea geometrica a fluxului de putere pentru autopropulsare presupune
directionarea lui de la axa in jurul careia se roteste arborele cotit al motorului la
axa transversala a automobilului, in jurul careia se rotesc rotile motoare. Aceasta
functie se realizeaza in transmisia principala prin tipul angrenajului utilizat si
anume angrenaje cu axe ortogonale in cazul dispunerii longitudinale a motorului si
angrenaje cu axe paralele la dispunerea transversala a motorului.
5.2.1 Constructia transmisiei principale
La automobilele la care motorul este dispus longitudinal, pentru constructia
transmisiei principale se utilizeaza angrenaje de tipul cu roti dintate conice sau
hipoide, iar la automobilele cu motorul dispus transversal, angrenaje cu roti dintate
cilindrice.
In figura 5.2 este reprezentata schema cinematica de organizare a unei
transmisii principale simple cu roti dintate conice.
Fig. 5.2 Organizarea cinematic a transmisiei principale simple
cu roi dinate conice
Elementul conducator al angrenajului este pinionul de atac 2, iar elementul
condus este roata dintata 3, cu care se afla permanent in angrenare. Fluxul de
putere este primit de pinion prin arborele 1 si flansa 9 de la transmisia
longitudinala in cazul organizarii clasice a transmisiei, sau direct de la arborele
secundar al cutiei de viteze, cu care este realizat corp comun, in celelalte moduri de
organizare a transmisiei. Roata condusa 3, numita si coroana diferentialului, este
solidarizata prin suruburile 6 de cacasa diferentialului 7, caruia ii transmite fluxul
de putere, de unde, divizat acesta este transmis mai departe prin arborii 8 spre
rotile motoare. Intreg ansamblul este montat, prin lagare cu rulmenti in carterul 4,
numit carterul puntii motoare.
In afara realizarii conditiilor de adaptare cinematica si geometrica a fluxului de
putere, pentru asigurarea calitatilor functionale in transmisia principala se prevad
o serie de solutii constructive privind tipul danturii, rigiditatea constructiei,
compensarea uzurii si pozitionarea relativa a rotilor.
Dintre tipurile de danturi ale rotilor conice, cea mai mare raspandire au primit-o
angrenajele conice cu dantura curba. Dantura curba, fata de celelalte tipuri de
danturi, asigura:
- la rapoarte de transmitere egale, dimensiuni de gabarit de pana la de doua ori
mai mici ( numarul minim de dinti ai pinionului poate fi redus la 56, fata
de minimum 13 cat este la celelalte doua tipuri);
- cresterea gradului de acoperire, ceea ce se traduce in functionare mai linistita
si durabilitate sporita;
- diminuarea sensibilitatii la deplasari relative ale rotilor, ca urmare a
deformatiilor elastice ale ansamblului in timpul functionarii, posibilitatea
eliminarii concentratorilor de tensiune prin procedee tehnologice simple;
- realizarea prin procedee de fabricatie cu productivitate marita.
Dintre transmisiile principale cu dantura curba, cea mai larga raspandire o au
cele cu dantura in arc de cerc, cunoscuta sub numele de dantura Gleason, aceasta
bucurandu-se si de avantajul prelucrarii danturii pe masini-unelte de mare
productivitate. Dezavantajul principal al angrenajelor cu dantura in arc de cerc il
constituie prezenta unor eforturi axiale mari, care isi schimba sensul la schimbarea
sensului de deplasare al automobilului. Avand in vedere ca aceasta situatie este de
scurta durata, atat sensul cat si valoarea fortelor axiale sunt acceptabile.
Angrenajele conice sunt foarte sensibile in ceea ce priveste conditiile de
montaj, in sensul asigurarii angrenarii corecte. In cazul cand varfurile conurilor
celor doua roti nu coincid, diferenta fiind de ordinul zecimilor de milimetri, apar
concentrari de forte pe muchiile dintilor, cresc brusc tensiunile de contact si
solicitarile de incovoiere, se amplifc zgomotul, incalzirea, uzura acestora si se
mareste considerabil posibilitatea distrugerii angrenajului. Chiar si in cazul unei
fabricatii si montaj corecte, calitatea angrenarii poate fi compromisa ca urmare a
deformarii pieselor transmisiei si uzarii rulmentilor.
Pentru elementele angrenajului conic, valorile deformatiilor admise sunt date
in figura 5.3. Asigurarea rigiditatii necesare este determinata de modul de montare
in carterul puntii a pinionului de atac, de tipul rulmentilor utilizati si de unele
masuri constructive.
Fig. 5.3 Deformaii admise la angrenajul conic
Pentru montarea pinionului de atac se utilizeaza doua solutii de rezemare si
anume intre reazeme si in consola. Cu toate ca, in cazul utilizarii unui montaj intre
reazeme, rigiditatea transmisiei principale creste de peste 30 de ori decat la
montajul in consola la microbuze, determinat de constructia carterului puntii
motoare, se utilizeaza rezemarea in consola. In figura 5.4 sunt prezentate solutii de
montare a pinionului de atac. Pentru a se micsora deformatiile axiale, se utilizeaza
rulmenti cu role conice cu unghi cat mai mare de deschidere a conului. Pentru
marirea lungimii efective a lagarului si pentru sporirea rigiditatii radiale a
pinionului, rulmentii se monteaza in ,,0 ( fig.5.4 a). In acelasi scop sunt indicate
rulmentii radiali cu doua randuri de bile, sau rulmentii radiali cu role, deoarece au
o mare rigiditate radiala (fig.5.4 b).
In toate cazurile, deformatiile axiale pot fi reduse printr-o strangere
preliminara pe directia axiala a pieselor montate pe arborele pinionului de atac.
Aceasta strangere conduce la anularea jocurilor axiale din lagare si la aparitia unor
deformatii elastice a rulmentilor. Valoarea strangerii initiale se accepta in limitele
0,0050,07mm si se apreciaza prin marirea momentului necesar insurubarii
piulitelor de reglare (1,52,0 N.m la pinionul montat in consola). Valoarea
definitiva a prestrangerii se stabileste in urma incercarilor experimentale pe proto-
tipuri. Odata cu cresterea prestrangerii se micsoreaza posibilitatea de perturbare a
angrenarii rotilor conice si se imbunatatesc conditiile de functionare a rulmentilor,
deoarece se asigura o distributie mai uniforma a sarcinilor pe bile sau role si se
reduce solicitarile dinamice provocate de schimbarea marimii si sensului fortelor
din angrenajul conic. Marirea strangerii peste o valoare optima conduce la o
sporire a uzurii lagarelor.
Pentru realizarea prestrangerii (fig.5.4 a) se utilizeaza piulitele 1 (cu sisteme
de asigurare a pozitiei) de pe arborii pinioanelor de atac. Saibele calibrate 2, dintre
inelele interioare ale rulmentilor servesc la reglarea jocului acestora. La
constructiile recente de autoturisme s-a renuntat la solutia de mai inainte,
inlocuindu-se saibele de reglaj cu o bucsa deformabila montata intre cei doi
rulmenti, sau intre rulmentul dinspre flansa pinionului si un umar al acestuia. In
figura 5.5 sunt prezentate solutiile de pretensionare cu bucsa elastica (1), utilizate
de cateva firme constructoare de autoturisme de teren.
Fig. 5.4 Soluii de montare a pinionului de atac
Avantajul acestei solutii consta in aceea ca pretensionarea rulmentilor se
asigura de la primul montaj, facand posibila automatizarea acestuia. In plus,
pretensionarea initiala este mentinuta constanta timp indelungat.
Fig. 5.5 Soluii pentru pretensionarea lagrelor pinionului de atac
a) Lada Niva; b) Suzuki Vitra; c) Ford, Mercedes
Montarea coroanei dintate a angrenajului conic in carterul puntii, prin
intermediul carcasei diferentialului, se face in cele mai frecvente cazuri prin
rulmenti cu role conice. Pentru reducerea lungimii efective dintre reazeme,
rulmentii sunt montati in ,,X(fig.5.6).
Fig. 5.6 Montarea coroanei dinate a transmisiei principale
Asigurarea unui montaj bun si a unei functionari corecte a angrenajului
conic se obtin prin reglarea jocului din angrenaj. Pentru aceasta, ambele roti sunt
prevazute cu posibilitatea de a se deplasa axial. La solutia din figura 5.4,a,
rulmentii sunt montati in carterul transmisiei principale prin intermediul carcasei 3,
fixate cu suruburile 4. ntre flansa carcasei 3 si carterul transmisiei principale se
dispune, dupa nevoie, un numar de saibe calibrate 5, pentru reglarea pozitiei axiale
a pinionului . La solutia din figura 5.4 b, pozitionarea axiala a pinionului se face
prin deplasarea mansonului 6 cu ajutorul surubului 7. Pozitionarea axiala a
coroanei din figura 2.4, se face prin desurubarea, in functie de sensul deplasarii, a
uneia dintre piulitele 1 sau 2 si insurubarea celeilalte.
Angrenarea corecta se verifica prin metoda petei de contact dintre flancurile
dintilor in angrenare. Pentru aceasta dintii pinionului de atac se acopera cu un strat
subtire de vopsea, apoi se invarteste transmisia principala in ambele sensuri. In
functie de marimea si pozitia petei lasate pe dintii coroanei se apreciaza calitatea
angrenarii. Angrenarea se considera corecta daca pata lasata pe coroana este de
minimum 60% din lungimea dintelui si spre varful conului.
Dupa verificarea calitatii angrenarii, se masoara jocul lateral dintre dinti,
care nu trebuie sa depaseasca anumite limite, in functie de modelul danturii.
Determinarea marimii jocului se face prin masurarea grosimii unei placute de
plumb dup ce in prealabil a fost introdusa intre danturile rotilor aflate in
angrenare.
In vederea realizarii unei inalte portante si a functionarii silentioase, la
angrenajele conice, se aplica finisarea prin procedeul lepuirii. Lepuirea consta
dintr-un cu un amestec de ulei cu carbura de siliciu sau coridon, in anumite conditii
de miscare relativa a rotilor. Ideea de baza la asigurarea miscarilor pe masinile de
lepuit este de a mentine si imbunatati contactul localizat la danturare, ceea ce
inseamna ca in timpul procesului de lepuire contactul se deplaseaza pe tot flancul,
asigurand un rodaj uniform pe toata lungimea dintilor. Lepuirea corecteaza
calitatea suprafetelor conjugate ale dintilor si, corespunzator unei indepartari
reduse de material, pata de contact a angrenajului.
Tab. 5.1
Jocul ntre flancuriledinilor n cazul angrenajelor conice
Modulul [mm] 4 6 9 12 25
Jocul ntre
flancurile
dinilor n
planul normal
[mm]
0,10,15 0,15
0,20
0,20
0,30
0,30
0,40
0,500,75
In figura 5.7 este prezentata constructia a doua transmisii principale simple
cu angrenaje de roti dintate conice. Constructia din figura 5.7 a, pentru un
autoturism cu punte rigida, are pinionul de atac 1 montat in consola prin rulmentii
2 direct in carterul 3 al transmisiei principale. Reglarea pinionului si pozitionarea
axiala a acestuia fata de coroana 16 se realizeaza prin saibele 8, piesele fiind
stranse de piulita 5 prin flansa 6. prin flansa 6, transmisia principala primeste
fluxul de putere al motorului de la transmisia longitudinala. Etansarea lagarului
este asigurata de deflectoarele 7 si 9 si de inelul 4. coroana dintata 16 se fixeaza
prin prezoanele 14 de carcasa 15 a diferentialului. Ansamblul de rulmenti 11 este
fixat de carter prin intermediul semilagarelor 13. reglarea coroanei se face cu
ajutorul piulitelor 10, asigurate in pozitia reglata de sigurantele basculante 12.
constructia din figura 5.7 b, asemanatoare constructiei de mai inainte, este
destinata unui autoturism cu punte cu roti independente, cand transmisia principala
impreuna cu diferentialul sunt dispuse pe masa suspendata a automobilului.
Fig. 5.7 Tipuri constructive de transmisii principale cu angrenaje
de roi dinate conice
Din categoria angrenajelor conice cu dantura curba fac parte si angrenajele
hipoide (angrenajele hipoide cu axe geometrice incrucisate, dispuse in planuri
diferite). In raport cu alte tipuri de angrenaje, angrenajele hipoide prezinta o serie
de avantaje:
- au capacitate mare de transmitere a efortului, datorita atat formei dintilor, cat
si configuratiei geometrice a ansamblului, care permite constructia unor
lagare rigide;
- metodele de prelucrare existente permit obtinerea unui contact liniar intre
dinti, respectiv posibilitatea controlului lungimii petei de contact, ceea ce
aduce un plus de crestere a capacitatii portante;
- datorita alunecarii intre dinti (in lungul dintelui), angrenajele hipoide
functioneaza mai linistit decat angrenajele conice cu dinti curbi;
- tehnologia de executie a rotilor hipoide este, in principiu, aceeasi ca si cea a
rotilor conice cu dantura curba, prelucrarea facandu-se pe aceleasi utilaje.
La folosirea angrenajelor hipoide trebuie sa se tina seama de faptul ca
prezenta alunecarii intre dinti, mult mai mare ca la angrenajele conice, creeaza
tendinta spre o uzura mai pronuntata de abraziune, decat la oboseala. Pentru
aceasta sunt necesare masuri suplimentare legate de calitatea suprafetelor dintilor,
care in acest caz trebuie sa aiba o duritate mai mare, iar pentru ungere sa se
utilizeze uleiuri corespunzatoare unor presiuni de contact mari si viteze de
alunecare sporite.
La angrenajele hipoide, figura 5.8, axa pinionului se poate gasi sub axa
coroanei - deplasarea axei pinionului fiind in sensul spirei coroanei (deplasare
hipoida pozitiva in fig. 5.8,a), sau deasupra axei pinionuluideplasarea axei
pinionului fiind in contrasensul spirei coroanei (deplasare hipoida negative in
fig.5.8,c). in figura 5.8 b este prezentat angrenajul conic echivalent.
Fig. 5.8 Angrenaje hipoide
a-deplasare pozitiv hipoid; b-angrenaj conic echivalent; c-deplasare
hipoid negativ
In legatura cu pozitia reciproca pinion-coroana se precizeaza ca la
deplasarea hipoida pozitiva (+E), pasul frontal al pinionului va fi mai mare decat
pasul frontal al coroanei, iar la deplasarea hipoida negativa (-E), pasul va fi mai
mic. Corespunzator acestor doua situatii, diametrul pinionului va rezulta mai mare
sau mai mic decat al pinionului conic de referinta (echivalent). Din motive de
crestere a capacitatii portante a angrenajului pentru automobile, angrenajul hipoid
se foloseste in toate cazurile in forma in care deplasarea aduce o marire a
diametrului pinionului.
Constructia unei transmisii principale cu angrenaj hipoid este prezentata in
figura 5.9.
Fig. 5.9 Transmisie principal cu angrenaj hipoid
La automobilele organizate dupa solutia ,,totul in spate, sau ,,totul in fata,
cu motorul dispus longitudinal, transmisia principala si cutia de viteze sunt
organizate intr-un carter comun (fig. 5.10), cu dispunerea transmisiei principale si
a diferentialului intre carterul ambreiajului si cutia de viteze. La transmisia
principala, compusa din pinionul 2 si coroana 3 a diferentialului, pinionul de atac
2, avand dimensiuni constructive apropiatede ale arborelui secundar 1 al cutiei de
viteze, se executa corp comun cu acesta, in capatul arborelui.
Fig. 5.10 Transmisie principal la automobile organizate totul pr o punte,
cu motorul dispus longitudinal
Cand motorul este dispus transversal, transmisia principala este organizata
sub forma unui angrenaj de roti cilindrice 1 si 2 cu axe fixe (fig. 5.11). pentru
sporirea rigiditatii arborilor cutiei de viteze si pentru deplasarea carterului puntii
motoare spre axa longitudinala a automobilului, pinionul 1 al transmisiei principale
se executa corp comun cu arborele secundar, in capatul din consola al arborelui
secundar. Coroana cilindrica 2 a diferentialului, impreuna cu diferentialul, sunt
dispuse in carterul puntii, plasat in zona ambreiajului. Deoarece utilizarea
angrenajului cilindric determina forte axiale mult mai mici fata de angrenajele
conice sau hipoide, pentru rezemarea coroanei, prin lagarele diferentialului, se
utilizeaza de regula rulmenti radiali axiali cu bile.
La transmisiile principale care au pinionul de atac solidar cu arborele
secundar al cutiei de viteze, pentru descarcarea rulmentilor arborelui secundar de
fortele axiale din angrenajele cu dinti inclinati ale mecanismului reductor al cutiei
de viteze se adopta pentru sensul inclinarii dintilor pinionului acelasi sens ca
pentru rotile dintate din cutia de viteze.
Fig. 5.11 Transmisie principal pentru dispunerea transversal a
motorului
5.2.2 Elemente de calculul transmisiei principale
Calculul transmisiei principale cuprinde calculul de dimensionare si
verificare al angrenajelor de roti dintate, de dimensionare si verificare al arborilor
si al rulmentilor.
a) Determinarea momentului de calcul. Pentru automobilele cu o punte
motoare momentul de calcul M
c
se considera momentul maxim al motorului M
M
,
redus la angrenajul calculat prin relatia:
M
c
=M
M
i
cv1
(5.1)
in care: - i
cv1
este raportul de transmitere al cutiei de viteze in prima treapta;
-
este randamentul transmisiei de la motor la angrenajul calculat.
Pentru automobile cu mai mult de o punte motoare, cand distributia
momentului motor nu este precizata, momentul de calcul se determina prin
reducerea la transmisia principala a momentului capabil la roti prin aderenta prin
relatia:
M
c
=
, ,
0
max
i
r Z
d
(5.2)
unde : - Z este reactiunea dinamica normala la puntea calculate ;
max
=0,70,8 coeficientul de aderenta ;
r
d
raza dinamica a rotii motoare;
i
0
raportul de transmitere al transmisiei principale;
, ,
- randamentul transmisiei de la rotile motoare la angrenajul transmisiei
principale calculate.
b) Indicatii privind calculul de rezistenta si dimensionare al
angrenajelor de roti dintate conice.
Variatia inaltimii dintilor rotilor dintate conice determina o rigiditate
variabila in lungul dintilor si, de aici, o distributie neuniforma a sarcinii.
Experienta a confirmat ca in calculele de rezistenta se obtin rezultate
satisfacatoare daca se considera rezistenta rotii conice egala cu rezistenta unei roti
cilindrice avand urmatoarele caracteristici : diametrul cercului de rostogolire egal
cu diametrul cercului de rostogolire al rotii conice in sectiunea medie a dintelui;
modulul corespunzator modulului rotii conice in aceeasi sectiune; profilul dintilor
corespunzator profilului dintilor rotii echivalente. Roata echivalenta se obtine prin
desfasurarea conului mediu pe un plan. Numarul de dinti al rotilor echivalente ale
angrenajului conic se determina cu relatiile :
m
ech
Z
Z
3
1
1
1
cos cos
;
m
ech
z
Z
3
2
2
2
cos cos
(5.3)
n care :
z
1
- este numarul de dinti ai pinionului de atac;
z
2
numarul de dinti ai coroanei;
1
si 2
- unghiul conului de divizare a pinionului, respective al coroanei;
m
- unghiul mediu de inclinare al dintilor.
Rotile de inlocuire fiind elemente imaginare de calcul, se lucreaza pentru
numerele de dinti ai rotilor echivalente cu numerele fractionare rezultate din calcul.
Pe baza acestor considerente, prin analogie cu relatiile de calcul stabilite
pentru rotile dintate cilindrice, se poate efectua calculul de dimensionare si
verificare la uzura a rotilor dintate conice.
La angrenajele conice se standardizeaza modulul frontal m
f
, intre modulul
frontal si modulul normal mediu determinat din asimilarea angrenajului conic cu
unul cilindric existand relatia:
1
1
sin
cos z
b m
m
m
nmed
f
+
(5.4)
in care b este latimea de lucru a danturii. Pentru latimea de lucru a danturii se
recomanda b = (68)m
med
.
Determinarea dimensiunilor conform calculului parametrilor geometrici ai
angrenajelor cu dinti in arc si cu inaltime variabila, presupune cunoasterea unor
date initiale stabilite din conditii cinematice si constructive, dupa cum urmeaza:
- numarul de dinti al pinionului si al coroanei (z
1
si z
2
);
- modulul frontal la diametrul mare (m
f
);
- unghiul de inclinare al spirei dintelui pe cercul mediu (
m
);
- unghiul de angrenare in sectiune normala (
n
).
c) Indicatii privind calculul de rezistenta si dimensionare al
angrenajelor hipoide. La angrenajele hipoide, pentru aceeasi valoare a razei medii
de divizare a coroanei, exista un numar mare de variante ale angrenajului hipoid.
Proiectantul trebuie sa determine grupul de angrenaje care satisfac conditia
constructiva (z
1
, z
2
, D
d2
si E), iar in final sa aleaga acel angrenaj la care raza de
curbura a dintilor corespunde posibilitatilor de reglaj ale unui cap portcutite
existent la masina de danturat si unei valori a unghiului (unghiul dintre axa
cinematica si axa geometrica a danturii), corespunzatoare sculelor existente sau
posibil de realizat, bineinteles cu respectarea unghiurilor medii de inclinare
med1
si
med2
, spre a mentine fortele ce actioneaza in lagare in jurul valorilor fortelor axiale
din lagarele arborelui secundar datorate angrenajelor de roti dintate ce formeaza
treptele cutiei de viteze. In aceste conditii dimensionarea rotilor componente
solicita un numar mare de calcule, datorita necesitatii de a se calcula prin tatonari
un numar mare de angrenaje, din care se alege unul corespunzator. Pentru aceasta,
calculul se desfasoara prin metode iterative, dupa metode specifice dezvoltate in
organe de masini. In aceste conditii, pentru predimensionarea transmisiilor
principale simple cu angrenaje hipoide se prezinta o metoda simplificata de calcul,
in care calculul de rezistenta al danturii hipoide se poate face dupa indicatiile de la
angrenajele conice.
Deplasarea hipoida E se determina in functie de diametrul de divizare
exterior al coroanei (rotii conduse a angrenajului) cu relatia:
E0,25D
d2
(5.5)
Daca M
c
este momentul de calcul exprimat in Nm, diametrul de divizare D
d2
se apreciaza orientativ cu relatia:
3
2
) 31 , 0 27 , 0 (
c d
M D
(5.6)
Latimea B a coroanei se determina cu relatia:
2 2
3
1
) 166 , 0 ... 125 , 0 ( G D B
e
(5.7)
In care G
2
este lungimea maxima a generatoarei conului de divizare al rotii
conduse. Valorile inferioare se aleg pentru coroane cu diametre mari, iar cele
superioare pentru coroane cu diametre mici.
La angrenajele hipoide, in afara calculului indicat mai inainte, se face
verificarea la incarcarea specifica pe 1cm de latime a coroanei cu relatia:
2
2
D b
M
K
c
(5.8)
Daca M
c
s-a calculat cu relatia:
'
1
cv M c
i M M
, incarcarea specifica
admisibila nu trebuie sa depaseasca 1150 MPa iar daca M
c
s-a calculat cu relatia :
' '
0
max
i
r Z
M
d
c , incarcarea specifica admisibila are valorile de 600...750 Mpa.
d) Indicatii privind calculul de dimensionare si verificare al arborilor si
lagarelor. Calculul arborilor transmisiilor principale cuprinde: determinarea
schemei de incarcare a arborilor, calculul reactiunilor, calculul momentului de
torsiune si incovoiere, determinarea diametrului si verificarea la rigiditate.
Pentru calculul fortelor transmise la arbori de catre rotile in angrenare se
considera forta normala de angrenare F
n
care actioneaza la mijlocul dintilor
(fig.5.12) cu cele trei componente: tangentiala F
t
, radiala F
r
si axiala F
a
La danturi conice drepte, componenta radiala F
r
actioneaza spre axa rotii, iar
cea axiala F
a
,dinspre varful conului de divizare spre roata. La danturi conice
inclinate sau curbe, functie de anumiti parametri geometrici, componentele F
r
si F
a
pot avea si sensuri negative.
Pentru calculul reactiunilor din lagarele de montare in carterul transmisiei
principale se utilizeaza relatii analoage celor stabilite la calculul reactiunilor din
lagarele arborilor cutiilor de viteza.
Fig. 5.12 Forele din angrnajul conic
Coeficientii y, functie de limita raportului
R V
F
e
a
(5.9)
au valorile y= 0 pentru
e
VR
F
a
<
, si y=0,4ctg
, pentru
e
VR
F
a
>
unde: F
a
este forta axiala din arbore;
R- rezultanta geometrica a reactiunilor Z si Y ;
unghiulnominal de contact (unghiul dintre directia de actionare a sarcinii
pe bile si un plan perpendicular pe axa rulmentului).
Pentru verificarea rigiditatii transmisiei principale, se procedeaza ca la
arborii din cutiile de viteze. Sagetile obtinute se compara cu limitele recomandate.
Avand reactiunile din lagare, se poate face calculul pentru alegerea rulmentilor
dupa metoda folosita si la cutia de viteze.
Tab. 5.2
Relatii pentru calculul fortelor din angrenajele ortogonale de roti
dintate
Roata conducatoare(pinion)
;
2
1
1
dm
c
t
D
M
F
c tg
F
F
m n
m
t
a
sin sin (
cos
1 1
t );
1
os
); sin sin cos (
cos
1 1 1
m n
m
t
r
tg
F
F t
n m dm
c
n m
t
n
D
M F
F
cos cos
2
cos cos
1
1
Sensul de: Semnul folosit in relatie pentru:
Inclinare a
dintilor
Rotire a rotii Forta axiala Forta radiala
dreapta Sens orar(dreapta) + --
dreapta Sens
antiorar(stanga)
+ --
stanga Sens orar (dreapta) -- +
stanga Sens
antiorar(stanga)
+ --
Roata condusa (coroana)
;
2
2
2
dm
c
t
D
M
F
); cos sin sin (
cos
2 2
m n n
m
t
a
tg
F
F t
); sin sin cos (
cos
2 2 2
m n
m
t
r
tg
F
F t
n m dm
c
n m
t
n
D
M F
F
cos cos
2
cos cos
2
2
stanga Sens
antiorar(stanga)
-- +
stanga Sens orar
(dreapta)
+ --
dreapta Sens antiorar
(stanga)
+ --
dreapta Sens orar
(dreapta)
-- +
5.3 DIFERENIALUL
5.3.1 Necesitatea diferentialului ca mecanism al puntii motoare
Diferentialul este un mecanism, inclus in puntea motoare, care divizeaza
fluxul puterii de autopropulsare primit de la transmisia principala in doua ramuri,
transmise fiecare cate unei roti motoare, oferind totodata rotilor puntii posibilitatea,
ca in functie de conditiile autopropulsarii, sa se roteasca cu viteze unghiulare
diferite. Principalele conditii de autopropulsare care impun rotilor sa se roteasca cu
viteze unghiulare diferite sunt urmatoarele:
- deplasarea pe traiectorii curbe, cand roata interioara curbei are de parcurs un
spatiu mai mic decat roata exterioara curbei;
- deplasarea rectilinie pe cai netede, cand rotile puntii au de parcurs spatii
egale iar automobilul, din diverse cauze, are rotile puntii cu raze inegale;
diferenta dintre raze poate fi datorata presiunii inegale din pneuri,
repartizarii incarcaturii asimetric fata de axa longitudinala a automobilului,
pneurilor la cele doua roti de simbol diferit, sau grad diferit de uzura;
- deplasarea rectilinie pe cai cu denivelari cand, datorita distributiei aleatoare
a denivelarilor sub forma de gropi si ridicaturi, rotile au de parcurs drumuri
de lungimi diferite.
In conditiile de mai sus, in lipsa diferentialului, in mecanismele puntii apar
incarcari suplimentare subforma unui flux ,,parazitde putere.
Pentru a evidentia functionarea diferentialului in figura 2.12a este prezentata
o punte motoare care, dupa parcurgerea unui segment rectiliniu al traiectoriei, intra
pe o portiune curba cu raza de virare R. pentru ca roata interioara 2 si exterioara 1,
avand vitezele unghiulare de rotatie egale, , corespunzatoare segmentului
rectiliniu si raze de rulare r
0
egale inainte de viraj, sa efectueze in viraj o rulare
simpla, trebuie sa-si modifice razele de rulare, pe baza elasticitatii pneului, in
proportia data de relatia cinematic a virajului:
2
2
2
1
2
1
B
R
B
R
v
v
r
r
r
r
+
(5.10)
in care : r
r1
si r
r2
sunt razele de rulare in viraj ale rotilor 1 si 2;
B- ecartamentul puntii;
v
1
si v
2
- vitezele periferice ale rotilor puntii.
Daca se admite modificarea razei de rulare functie de forta la roata F
R
si
coeficientul de elasticitate tangentiala al pneului K, liniara de forma: r
r
= r
0
- k F
R
,
razele de rulare ale rotilor in viraj vor fi:
r
r1
= r
o1
- k F
R1
; r
r2
= r
o1
- k F
R2
, (5.11)
unde: r
o1
si r
o2
sunt razele de rulare corespunzatoare fortelor tangentiale la rotile
libere (roti conduse). Prin inlocuirea relatiilor de mai sus, in relatia cinematica a
virajului, se obtin intre fortele la roata 1 (F
R1
), si la roata 2,(F
R2
), relatiile:
,
_
2 2
2 0
2 1
B
R K
B r
B
R
B
R
F F
R R
;
,
_
2 2
2 0
1 2
B
R K
B r
B
R
B
R
F F
R R
; (5.12)
Fig. 5.13 Modelul plan al punii n viraj
Conditia dinamica de autopropulsare pe traiectorie este determinata de
bilantul de tractiune prin relatia: F
R1
+F
R2
=R, unde R este suma rezistentelor la
inaintare.
Prin rezolvarea sistemului de ecuatii de mai sus se obtin pentru fortele la
rotile 1 si 2, relatiile:
1
1
1
1
]
1
,
_
2
2
2 0
1
B
R K
B r
R
R
B
R
F
R ;
1
1
1
1
]
1
,
_
+
+
2
2
2 0
2
B
R K
B r
R
R
B
R
F
R ;
(5.13)
daca R <
,
_
+
2
0
B
R K
B r
, atunci F
R2
<0, iar roata interioara 2 se comporta ca o
roata franata. Puterea corespunzatoare , acestei forte numita putere suplimentara
sau parazita, P
R2
=F
R2
v
2
unde v
2
=r
r2
este viteza de translatie a centrului rotii
interioare virajului, de sens opus puterii pentru autopropulsare, se suprapune peste
fluxul de putere al motorului, incarcand suplimentar roata exterioara a virajului.
Diferentialul este un mecanism de tipul mecanismelor planetare diferentiale
cu mobilitatea M=2 la care numai axa centrala este baza. Constructia
diferentialului este caracterizata de existenta fortelor de frecare intre elementele
sale aflate in contact, astfel ca prin aceste forte se realizeaza legatura la baza a
elementelor mecanismului si diferentialul se blocheaza (M=0). La blocarea
diferentialului, cand el se roteste in jurul axei centrale ca un tot unitar, rotile puntii
se rotesc cu viteze unghiulare egale.
Cand momentul corespunzator puterii suplimentare (,,puterii parazite), este
mai mare decat momentul fortelor de frecare dintre elementele diferentialului, care
reprezinta legatura de blocare a diferentialului, atunci prin desfacerea legaturii,
diferentialul va intra in functiune ca mecanism planetar monomobil (M=1) si va
permite rotilor puntii sa se roteasca cu viteze unghiulare diferite in sensul maririi
vitezei unghiulare de rotatie a rotii exterioare virajului si micsorand-o pe cea a rotii
interioare virajului.
Se deduce ca marimea ce comanda functionarea diferentialului este fluxul de
putere ce incarca suplimentar puntea in conditiile in care se impun viteze
unghiulare diferite la rotile motoare.
In lipsa diferentialului, aparitia ,,puterii parazite la rotile puntii determina:
sporirea solicitarilor din mecanismele puntii ,cresterea pierderilor mecanice prin
cresterea puterii transmise, sporirea consumului de combustibil si a uzurii
anvelopelor, reducerea manevrabilitatii si stabilitatii automobilului. Aparitia
,,puterii parazite este favorizata de: deplasarea pe cai cu rezistenta mica la
inaintare; folosirea de pneuri de diametru mare si rigide (K mic); viraje cu raza de
curbura mica.
5.3.2 Cinematica si dinamica diferentialului
a) Cinematica diferentialului. Diferentialul utilizat la automobile este in
general, cu roti dintate conice. Elementele unui astfel de diferential sunt (figura
5.14): doua pinioane planetare fixe pe arborii transmisiilor la rotile motoare,
satelitii aflati in permanenta angrenare cu rotile planetare, bratul portsatelit (axul)
si carcasa diferentialului. Elementul conducator este bratul portsatelit, care
primeste fluxul de putere al motorului de la coroana transmisiei principale prin
intermediul carcasei.
Fig. 5.14 Schema cinematica diferenialului
Pentru a stabili legaturile cinematicedintre elementele diferentialului se
aplica metoda opririi imaginare a elementului conducator (metoda Willis). Metoda
consta in a imprima bratului portsatelit o miscare egala cu miscarea lui reala, dar
de sens opus, cand mecanismul planetar devine mecanism cu axe fixe.
Mecanismele obtinute unul din altul prin metoda descrisa, datorita invariatiei
miscarilor relative, sunt transmisii echivalente cinematic.
Daca
1
si
2
sunt viteze unghiulare ale arborilor 1 si 2 ai mecanismului
inainte de oprirea imaginara si
3
viteza unghiulara a elementului conducator, dupa
oprire (prin rotirea imaginara cu
3
in jurul axei centrale OOa mecanismului),
vitezele unghiulare ale arborilor vor deveni:
1
-
3
, respectiv
2
-
3
. Pentru
mecanismul cu axe fixe asociat, raportul de transmitere de la arborele 1 la arborele
2 este:
t cons
R
R
i tan
5
4
3 2
3 1
2 1
(5.14)
unde R
4
si R
5
sunt razele de rostogolire ale rotilor planetare 4 si 5. Aceasta
relatie se mai poate scrie si sub forma:
1
-
3
(1 + i
1-2
) +
2
i
1-2
= 0 (5.15)
pentru diferentiale simetrice (R
4
=R
5
) relatia de mai sus va deveni:
1
- 2
3
+
2
= 0 (5.16)
In functie de conditiile de deplasare ale automobilului, se desprind
urmatoarele stari cinematice de functionare ale diferentialului:
-deplasare rectilinie pe cai netede: in acest caz, in ipoteza rotilor egale, cand
rotile au de parcurs spatii egale atunci
1
=
2
=>
s
=0 (
s
-viteza unghiulara a
satelitilor), ceea ce inseamna ca diferentialul nu functioneaza, rotile puntii
comportandu-se ca in cazul unei legaturi directe intre ele pritr-un arbore rigid;
-deplasare in viraj sau rectiliniu pe cai cu denivelari: parcurgerea de catre
roti a unor spatii inegale se obtine cand
1
2
. Pentru
2
>
1
, vitezele unghiulare
ale rotilor planetare sunt:
2 2
3
2
5
5 3 1 3
4
5
5 3 2
>
+ +
R
R
R
R
(5.17)
iar pentru
1
>
2
, vitezele unghiulare ale rotilor planetare sunt:
2 2
3
6
5
5 3 2 3
2
5
5 3 1
>
+ +
R
R
R
R
(5.18)
astfel incat cu cat se mareste viteza unghiulara a rotii planetare in avans, cu atat se
reduce viteza unghiulara a rotii intarziate. Pentru un automobil, cu ecartamentul
puntii motoare B, care se deplaseaza cu viteza v
a
pe o traiectorie curba cu raza de
virare R, din conditia cinematica de virare se obtine:
R
B
r
v
r
a
(5.19)
unde r
r
este raza medie de rulare a rotilor puntii.
Din aceasta relatie se deduce ca diferenta vitezelor unghiulare ale rotilor este
direct proportionala cu cresterea vitezei automobilului si a ecartamentului puntii si
invers proportionala cu cresterea dimensiunilor radiale ale rotii si razei de virare;
-oprirea brusca a elementului conducator al puntii motoare: la o asemenea
oprire, care determina blocarea carcasei diferentialului (
3
=0), se obtine
1
=-
2
,
adica rotile se vor roti cu viteze unghiulare egale, dar de sensuri contrare. Aceasta
situatie de functionare a diferentialului este deosebit de periculoasa daca apare in
timpul deplasarii cu viteze mari, deoarece automobilul,pivotand in jurul puntii din
spate isi pierde stabilitatea. Pentru preintampinarea unei astfel de situatii, toate
dispozitivele de franare ale automobilului sunt plasate, fata de circuitul fluxului
puterii de autopropulsare, in aval de diferential;
-deplasarea pe cai cu aderenta scazuta: aderenta scazuta a caii poate
determinaca, la o anumita valoare a fortei la roata, una dintre roti sa inceapa sa
patineze. Fenomenul patinarii rotii este echivalent cu reducerea vitezei de translatie
a centrului rotii, roata tinzand sa ramana in urma celeilalte roti. Aceasta tendinta
este compensata de diferential, care, intrand in functiune, reduce turatia rotii in
avans si o sporeste pe cea a rotii incetinite. Compensarea reducerii vitezei de
translatie se poate face pana cand atinge valoarea maxima ()
max
=2
3
. la
aceasta valoare a diferentei vitezelor unghiulare ale rotilor, acestea devin :
1
=2
3
si
2
=0, cand roata antrenata de arborele 1 tinde sa patineze;
2
=2
3
si
1
=0, cand roata antrenata de arborele 2 tinde sa patineze.
Aceasta situatie, echivalenta fizic opririi rotii aflate in stare de aderenta si
transmiterii intregului flux de putere catre roata care patineaza, determina pierderea
capacitatii de autopropulsare a automobilului. Preintampinarea situatiei se face prin
impiedicarea diferentialului de a functiona, lucru posibil de realizat prin blocarea
diferentialului, cu sisteme mecanice de blocare, sau prin autoblocarea
diferentialului prin generarea unor forte mari de frecare
.
b. Dinamica diferentialului. Daca momentul de torsiune al carcasei (M
3
),
se transmite prin axa portsatelit fara pierderi (cauzate de frecare) satelitului din
conditia de echilibru dinamic al satelitului, acesta este impartit in parti egale rotilor
planetare 1 si 2, adica:
2
3
1
M
M
si
2
3
2
M
M
Cand
1
2
, datorita vitezelor relative dintre elementele diferentialului, apar
forte de frecare, care, reduse la arborii planetari 1 si 2, vor da un moment de
frecare M
f
cu sens opus tendintei de modificare a vitezei unghiulare.
Bilantul de putere al diferentialului este:
2
2 1
3 3 2 2 1 1
+
f
M M M M (5.20)
Luand in considerare relatia:
1
-2
3
+
2
=0 , deducem relatia
2
2 1
3
,
astfel ca pentru
1
>
2
vom avea:
0
2 2
3
2 2
3
1 1
,
_
+
+
,
_
f f
M M
M
M M
M
(5.21)
Deoarece vitezele unghiulare de rotatie ale rotilor puntii,
1
si
2
, sunt
nenule, inseamna ca relatia de mai sus este adevarata cand:
2
3
1
f
M M
M
;
2
3
2
f
M M
M
+
(5.22)
Cand
1
<
2
, vom avea:
2
3
1
f
M M
M
+
;
2
3
2
f
M M
M
(5.23)
Din ultimele doua relatii se observa ca momentele ce le revin celor doi
arbori planetari nu sunt egale, diferenta dintre momente fiind cu atat mai mare cu
cat momentul corespunzator frecarii interne din diferential este mai mare.
Raportul supraunitar al celor doua momente, notat cu , se numeste
coeficient de blocare al diferentialului. Pentru cazul in care
1
>
2
:
2
2
3
3
1
2
f
f
M M
M M
M
M
+
(5.24)
Din aceasta relatie se obtin, pentru momentele transmise arborilor planetari,
expresiile:
- pentru arborele intarziat:
1
3 1
M M
(5.25)
- pentru arborele in avans:
1
3 2
M M
(5.26)
-
Se observa ca arborele planetar al rotii intarziate este cu atat mai incarcat
fata de arborele planetar al rotii in avans, cu cat coeficientul de blocare , deci
momentul de frecare M
f
, este mai mare.
Pentru ca diferentialul cu puterea de frecare
2
2 1
f f
M P sa-si
indeplineasca rolul sau cinematic, trebuie ca puterea suplimentara (,,puterea
parazita) sa fie mai mare decat P
f
. La diferentialele cu frecare interioara marita
( mare), in cazul deplasarii pe cai bune, cand fluxul posibil de ,,putere parazita
este mare, intotdeauna se realizeaza conditii de functionare cinematica a
diferentialului. La deplasarea pe cai cu rezistente mari si cu aderenta scazuta,
cand ,,puterea parazita este mica, aceste diferentiale nu vor functiona, puntea
comportandu-se ca o punte fara diferential. In acest fel se evita situatia patinarii
totale a uneia dintre roti si a blocarii celeilalte.
5.3.3 Constructia diferentialului
In constructia diferentialelor se disting mai multe solutii, grupate astfel
(figura 5.15):
Fig. 5.15 Clasificarea diferenialelor
In afara utilizarii diferentialului ca mecanism al puntii motoare, in
constructia de automobile diferentialul se mai foloseste si ca mecanism divizor de
flux la automobilele de tipul 4x4.
Solutii constructive de diferentiale cu roti dintate conice. Carcasa 4 a
diferentialului, solidara de coroana dintata 2 a transmisiei principale, se roteste
datorita miscarii primite de la transmisia principala. In carcasa sunt dispusi satelitii
3 si 6 care angreneaza in permanenta cu doua roti planetare, fiecare comuna cu cate
unul din arborii planetari 1 si 5. Fixarea satelitilor in carcasa se face prin boltul 7.
Pentru a asigura o centrare buna si o angrenare corecta a satelitilor cu rotile
planetare, la constructia din figura 5.16 b suprafata frontala a satelitilor este sferica.
Constructiv, functie de tipul si de destinatia automobilului, satelitii sunt in
numar de 2 sau 4, montati echidistant pe cercul de rostogolire al pinioanelor
planetare. Prin acest montaj se asigura anularea sarcinilor radiale si se reduc
dimensiunile rotilor dintate prin marirea numarului de dinti aflati simultan in
angrenare. Elementele componente ale unui diferential cu patru sateliti sunt
prezentate in figura 5.17.
Clasificarea diferenialelor
Dup caracteristicile
cinematice
Dup caracteristicile dinaice
Simple
Blocabile
Autoblocabile
Simetrice
Asimetrice
Fig. 5.16 Construcia diferenialului simplu cu roi dinate conice
Fig. 5.17 Diferenial cu patru satelii i cu angrenaje cu roi conice
Fig. 5.18 Diferenial cu roi dinate cilindrice
In figura 5.18 se reprezinta schema cinematica si constructia unui diferential
simplu cu roti dintate cilindrice. Satelitii cilindrici 3 si 4, angrenati intre ei, sunt
simultan in angrenare-primul 3 cu roata planetara 1, iar al doilea 4 cu roata
planetara 2. Elementul conducator al diferentialului este carcasa 5, care este
antrenata de transmisia principala. Constructiv, aceste diferentiale sunt realizate cu
4 sau 6 sateliti montati pereche.
Elementele de calculul diferentialului
Calculul de rezistenta al diferentialelor cuprinde calculul rotilor planetare,
calculul satelitilor si al axelor satelitilor.
Pentru calculul organologic este necesar sa se stabileasca, pe baza fluxului
de putere care circula prin elementele diferentialului, momentele de calcul. In
figura 5.19 este reprezentata schema fluxului de puteri intr-un diferential simetric
cu roti dintate conice, cand <.
Puterile corespunzatoare din diferential sunt:
2
" '
0 1
+
i i M P
c v M
(5.27)
care este puterea transmisa de transmisia principala carcasei diferentialului(M
M
este
momentul maxim al motorului; i
cv1
- raportul de transmitere al cutiei de viteze in
prima treapta de viteze; i
0
raportul de transmitere al transmisiei principale);
2
' "
" "
f f
M P
(5.28)
reprezint puterea de frecare transmisa de arborele in avans carcasei
diferentialului;
2
' "
' '
f f
M P
(5.29)
este puterea de frecare transmisa de carcasa arborelui planetar intarziat;
f f
P P P P ' " ' +
- puterea transmisa de carcasa axelor satelitilor;
f
P
P
'
2
'
+
- puterea transmisa arborelui planetar intarziat;
f
P
P
"
2
1
- putera transmisa arborelui planetar in avans.
Fig. 5.19 Circulaia puterilor n diferenial
Pentru diferentialele cu proprietati de blocare simetrice (P
f
=P
f
=P
f
), fluxul
de putere care circula prin angrenajele de roti dintate este egal cu fluxul de putere
primit de carcasa de la transmisia principala. Deci, momentul de calcul pentru
rotile dintate este:
N
i i M
M
cv M
cc
0 1
(5.30)
unde N este numarul satelitilor.
Momentul de calcul pentru imbinarea rotilor planetare cu arbori planetari si
pentru arbori planetari este:
+
+
1
0 1 1
i i M
P P
M
cv M
f
c
(5.31)
unde este coeficientul de blocare al diferentialului.
Calculul de dimensionare si verificare al angrenajelor conice din diferential
se face dupa metodologia descrisa pentru roti dintate conice cu dantura dreapta.
Calculul axului satelitilor se face sub actiunea fortelor ce actioneaza asupra
satelitilor (fig. 5.20).
Fig. 5.20 Schema de calcul a diferenialului
Sub actiunea fortei F=2F
t
(F
t
este forta tangentiala din angrenajul satelit-
pinion planetar),axul satelitilor este solicitat la forfecare si strivire. Eforturile
unitare de forfecare ce iau nastere se calculeaza cu relatia:
2
0
2
1 4 4
d R N
i icv M
d
F
m
m
f
(5.32)
in care : R
m
este raza medie de divizare a pinionului planetar; d diametrul axului.
Eforturile unitare de strivire dintre axul satelitilor si satelit se calculeaza cu
relatia:
1
0 1
1
1
h d R N
i i M
h d
F
m
cv M
s
(5.33)
Strivirea dintre axul satelitului si carcasa diferentialului se verifica cu relatia:
2 1
0 1
2
1
2
h d R N
i i M
h d
R
R
F
cv M
m
s
(5.34)
Datorita solicitarilor la care sunt supuse axele satelitilor, acestea se executa
din oteluri aliate cu continut redus de carbon.
In vederea ridicarii rezistentei la uzura, uneori axele satelitilor se aramesc pe
toata suprafata cu un strat de 0,01mm, sau se acopera cu un strat de sulfura de fier.
Pentru evitarea griparii este necesara asigurarea unei ungeri corecte a axelor
satelitilor.
Sub actiunea fortelor axiale rezultate din angrenarea satelitului cu rotile
planetare, suprafata de contact dintre satelit si carcasa diferentialului este solicitata
la strivire. Eforturile unitare de strivire ce apar pe aceasta suprafata se determina cu
relatia:
sin
) (
4
2 2
1
0 1
3
tg
d d R N
i i M
m
cv M
s (5.35)
Calculul asamblarii cu caneluri dintre rotile planetare si arborii planetari se
face dupa metodologia folosita si la arborele ambreiajului.
5.4 ARBORII PLANETARI
5.4.1 Destinaia i clasificarea arborilor planetari
Arborii planetari servesc la transmiterea momentului motor de la diferenial
la roile motoare ale automobilului.
Ei sunt solicitai la torsiune de ctre momentul motor, dar i la nccovoiere
de ctre forele care acioneaz asupra roilor motoare.
Clasificarea arborilor planetari se face dup solicitrile la care sunt supui,
solicitri care depind de modul de montare al captului lor exterior n carterul
punii motoare (figura 5.20):
Fig. 5.20 Schema de montare a arborilor planetari n carterul punii mptoare
a-total descrcai; b-semincrcai; c-total ncrcai
1-trompa carterului punii; 2,3-rulmeni
- arborii planetari total descrcai sunt solicitai numai la torsiune. n acest
caz butucul roii se monteaz prin intermediul rulmenilor conici pe trompa
carterului punii. Solicitarea la ncovoiere este preluat numai de carterul
punii motoare. Aceast soluie se utilizeaz la autocamioane i autobuze;
- arborii planetari semincrcai se monteaz printr-un singur rulment dispus
ntre butucul roii i carterul punii motoare. Arborii sunt solicitai la torsiune
i parial la ncovoiere. Aceast soluie se utilizeaz la autoturisme i
autocamioane uoare;
- arborii planetari total ncrcai se sprijin printr-un singur rulment montat
ntre arbore i carterul punii motoare. Aceti arbori preiau n totalitate
eforturile la torsiune i ncovoiere. Soluia se utilizeaz la autoturisme.
5.4.2 Tipuri constructive de arbori planetari
Pentru a transmite momentul motor de la diferenial la roile motoare arborii
planetari sunt solidarizai la rotaie att cu diferenialul ct i cu butucul roii
motoare.
n figura 5.21 sunt prezentate tipurile constructive de arbori planetari ce se
deosebesc ntre ei dup modul de solidarizare cu pinioanele planetare i cu roile
motoare.
Fig. 5.21 Tipuri constructive de arbori planetari
- la soluia prezentat n figura 5.21 a, solidarizarea cu pinionul planetar se
face prin intermediul canelurilor, iar cu butucul roii prin flans;
- la soluia prezentat n figura 5.21 b, solidarizarea cu pinionul planetar se
face prin intermediul canelurilor, iar cu butucul roii prin intermediul unei
pene, care are un loca pe poriunea conic;
- la soluia prezentat n figura 5.21 c, pinionul planetar face corp comun cu
arborele, iar cu butucul roii prin prin intermediul unei pene, care are un
loca pe poriunea conic;
- la soluia prezentat n figura 5.21 , solidarizarea att cu butucul roii ct i
cu pinionul planetar se face prin intermediul canelurilor.
n figura 5.22 se prezint transmisia la roile motoare n cazul unui arbore
planetar total ncrcat. Captul exterior al arborelui este fixat n tromp prin
intermediul unui rulment cu bile.
n figura 5.23 se prezint transmisia la roile motoare la care se folosete soluia
cu arbore planetar semincrcat. Rulmentul exterior se monteaz pe piesa 3 fixat
cu uruburi de carterul punii, iar rulmentul interior este montat pe caseta
diferenaialuli.
n figura 5.24 se prezint transmisia la roile motoare motoare la care se
folosete soluia cu arbore planetar total descrcat. Butucul roii motoare se sprijin
pe rumenii cu role conice 3,5 care se monteaz pe tromp. n felul acesta arborele
planetar este solicitat numai la torsiune de momentul pe care l transmite butucului
roii prin flana forjat dintr-o bucat cu arborele. Piulia i contrapiulia servesc la
fixarea rulmenilor, precum i la reglarea lor. mpiedicarea ptrunderii unsorii la
butucul de frn este realizat de garnitura de etanare care se afl pe captul
exterior al trompei. Rulmentul interior este fixat pe carcasa diferenialului.
Fig. 5.2 Transmisie cu arbori planetari total ncrcai
1-Butucul roii; 2-rulment exterior; 3-arbore planetar; 4-rulment interior; 5-
pinion planetar; 6-caset diferenial; 7-tromp
Fig. 5.3 Transmisia la roile motoare cu arbori planetari semincrcai
Fig. 5.4 Transmisia la roile motoare cu arbori planetari total descrcai
5.5 MATERIALE UTILIZATE LA CONSTRUCIA ELEMENTELOR
PUNII MOTOARE
5.5.1 Transmisia principal.
Pinionul de atac i coroana se fabric din aceleai materiale ca roile dinate
din CV;
5.5.2 Diferenialul. Caseta diferenialului se fabric prin turnare dinfont
maleabil sau din oel.
Pinioanele planetare i sateliii se fabric din aceleai materiale ca roile
dinate din CV;
Crucea sateliiloe se exexcut din oeluri aliate cu coninut redus de carbon:
20 MoC 12; 21 TCM 12; 12 CN 33, care se cementeaz. Dup tratamentul termic
HRC = 57...62. n unele cazuri se execut din din oeluri aliate cu coninut mediu
de carbon: 41 C 10; 40 Mc 11; 41 MoC 11 supuse tratamentului termic de
mbuntire. Rezult HRC = 56...62.
5.5.3 Arborii lanetari. n general se confecioneaz din oeluri aliate cu
coninut mediu de carbon: 45 C 10; 41 MoC 11X; 35 CN 15X supuse
tratamentului termic de mbuntire. Rezult HB = 340...440.
5.5.4 Carterul punii. Se execut prin turnare din font maleabil sau din oel.
Carterele sudate se execut din tabl de oel. Pentru trompe se utilizeaz evi din
tabl sudat sau evi nesudate cofecionate din oeluri cu un coninut de 0,2% C.
S-ar putea să vă placă și
- Sutidu de Caz Cca2, Caseta de DirectieDocument7 paginiSutidu de Caz Cca2, Caseta de DirectieCosmyn CojocaruÎncă nu există evaluări
- Memoriu Tehnic CCADocument6 paginiMemoriu Tehnic CCARadu JohnnyÎncă nu există evaluări
- Studiu de Nivel Privind Sistemul de Directie Al AutocamioanelorDocument20 paginiStudiu de Nivel Privind Sistemul de Directie Al AutocamioanelorEduArd BogdanÎncă nu există evaluări
- Mircea Nastasoiu - Aspecte Generale Privind Transmisia TractoarelorDocument8 paginiMircea Nastasoiu - Aspecte Generale Privind Transmisia TractoarelorVladMartisÎncă nu există evaluări
- Subiecte Examen TractoareDocument4 paginiSubiecte Examen TractoareSweet 4Ever100% (1)
- 0.d. Tot Tot Actual AmbreiajulDocument63 pagini0.d. Tot Tot Actual AmbreiajulciurtecarmensilviaÎncă nu există evaluări
- AmbreiajDocument17 paginiAmbreiajDragan AlexandruÎncă nu există evaluări
- Ambreiajul MecanicDocument8 paginiAmbreiajul Mecanic92zap92Încă nu există evaluări
- Model Cutie 1Document57 paginiModel Cutie 1Tudor CostinÎncă nu există evaluări
- Punte Multi BratDocument15 paginiPunte Multi BratGaidargi RazvanÎncă nu există evaluări
- TransmisiiDocument16 paginiTransmisiiCosminAvăcărițeiÎncă nu există evaluări
- Punte Rigida Cu Patru BrateDocument9 paginiPunte Rigida Cu Patru BrateStefan IonutÎncă nu există evaluări
- Mecanismul de Directie 2Document30 paginiMecanismul de Directie 2Badea AndreiÎncă nu există evaluări
- Diagnosticarea SuspensieiDocument11 paginiDiagnosticarea SuspensieiMary Palade100% (2)
- Diferentialul AutoDocument8 paginiDiferentialul AutoAle AlexusÎncă nu există evaluări
- Proiect Cca 2Document1 paginăProiect Cca 2Mihai BeluÎncă nu există evaluări
- Cutii de VitezeDocument5 paginiCutii de VitezeRadu BuruianaÎncă nu există evaluări
- Cca 2Document19 paginiCca 2Sabian100% (1)
- Variatoare Cu Saibe Si CureaDocument3 paginiVariatoare Cu Saibe Si CureaIgnat CosminÎncă nu există evaluări
- Eccp Suspensia Automobilului ProiectDocument57 paginiEccp Suspensia Automobilului ProiectPaulet Silviu100% (2)
- Varianta A.2 SFDSDocument13 paginiVarianta A.2 SFDSAxapolis GeorgeÎncă nu există evaluări
- Maniabilitatea Autovehiculului Mercedes 509 CdiDocument5 paginiManiabilitatea Autovehiculului Mercedes 509 CdiRetep LacasÎncă nu există evaluări
- Cutia de VitezeDocument11 paginiCutia de VitezemarbadanÎncă nu există evaluări
- ProiectDocument13 paginiProiectGheorghe CojocariÎncă nu există evaluări
- Cap 1Document38 paginiCap 1NYILAS ROBERTÎncă nu există evaluări
- Teren 1.1 FUN CţiunileDocument8 paginiTeren 1.1 FUN CţiunileAlexandru GârnițăÎncă nu există evaluări
- Etapa I Proiect CCSTDocument36 paginiEtapa I Proiect CCSTCosminAvăcăriței100% (1)
- PROIECT AUTO CURAT3 (2) + Autoutilitara Cu Basculanta 8x8 MACDocument75 paginiPROIECT AUTO CURAT3 (2) + Autoutilitara Cu Basculanta 8x8 MACraduxcÎncă nu există evaluări
- Diagnostic Are Auto - Puntea Si Suspensia Din FataDocument23 paginiDiagnostic Are Auto - Puntea Si Suspensia Din FataDragos Ene100% (1)
- Scan 10Document58 paginiScan 10Opruta DanielÎncă nu există evaluări
- Puntea Față Motoare Articulată Directoare A AutoturismelorDocument15 paginiPuntea Față Motoare Articulată Directoare A AutoturismelorCătălin Satcău100% (2)
- PUNTIDocument23 paginiPUNTICristian ChiruÎncă nu există evaluări
- Bare AntiruliuDocument3 paginiBare AntiruliuJacqueline HoganÎncă nu există evaluări
- Proiect Cca AmbreiajDocument33 paginiProiect Cca AmbreiajFornade AndreiÎncă nu există evaluări
- Directie AutobetonieraDocument20 paginiDirectie AutobetonieraCucu Lucian100% (1)
- DinamicaDocument61 paginiDinamicaNeacsuGeorgianaAlinaÎncă nu există evaluări
- Proiect Mercedes SprinterDocument29 paginiProiect Mercedes SprinterRobert TicuÎncă nu există evaluări
- Ccar2 ProiectDocument25 paginiCcar2 ProiectRazvanAmironesei100% (1)
- Subansamblul de Suspensie Al AutomobiluluiDocument4 paginiSubansamblul de Suspensie Al AutomobiluluinifedanÎncă nu există evaluări
- Diferential AutoblocantDocument3 paginiDiferential AutoblocantZuu AlexÎncă nu există evaluări
- Asamblarea Sistemului de DirectieDocument18 paginiAsamblarea Sistemului de DirectieValeria Iorgulis100% (1)
- CCA2 1161 Roncea Suspensie - AutoturismDocument33 paginiCCA2 1161 Roncea Suspensie - AutoturismStefan Roncea100% (1)
- SFDS Varianta E FinalDocument12 paginiSFDS Varianta E FinalGeorge MorunÎncă nu există evaluări
- Cazan AlexandruDocument10 paginiCazan AlexandruVASILIIÎncă nu există evaluări
- Suspensie Rigida Cu 3 BrateDocument20 paginiSuspensie Rigida Cu 3 Bratestranger3333Încă nu există evaluări
- Sistemul de FranareDocument11 paginiSistemul de FranareIulian StanÎncă nu există evaluări
- Proiect CCADocument18 paginiProiect CCAmmm mmmmasÎncă nu există evaluări
- Popescu Iuliana - Proiect CCA2Document28 paginiPopescu Iuliana - Proiect CCA2TanaseLoriÎncă nu există evaluări
- Capitolul 4 - Transmisia TractoruluiDocument14 paginiCapitolul 4 - Transmisia TractoruluiEduard.0% (1)
- Evolutia Sistemelor de SuspensieDocument26 paginiEvolutia Sistemelor de SuspensieJános HalászÎncă nu există evaluări
- SFDS MateescuV. Note Curs 2015 Capitolul3Document56 paginiSFDS MateescuV. Note Curs 2015 Capitolul3Catalina VasileÎncă nu există evaluări
- Curs 2-Puntea Din Fata, Arborii PlanetariDocument18 paginiCurs 2-Puntea Din Fata, Arborii PlanetariBalan C. SilviuÎncă nu există evaluări
- Arbore CotitDocument69 paginiArbore CotitPaula JurcăuÎncă nu există evaluări
- Punte HDocument8 paginiPunte HNicolae SabinÎncă nu există evaluări
- 1.2 Realizarea Proiectului de Org GeneralaDocument11 pagini1.2 Realizarea Proiectului de Org GeneralaMircea UngureanuÎncă nu există evaluări
- Sistemul de Directie Cu Mecanism de Actionare PinionDocument19 paginiSistemul de Directie Cu Mecanism de Actionare PinionIyadAlsabbahÎncă nu există evaluări
- Mecanismele de Putere Ale Puntii MotoareDocument37 paginiMecanismele de Putere Ale Puntii MotoareDobrea CatalinÎncă nu există evaluări
- Proiectarea Mecanismelor de Putere Ale Puntii MotoareDocument46 paginiProiectarea Mecanismelor de Putere Ale Puntii Motoarenicol_irina93Încă nu există evaluări
- Puntea MotoareDocument19 paginiPuntea MotoareComy Come67% (3)
- Puntea Motoare FinalDocument45 paginiPuntea Motoare Finalnicusor1995Încă nu există evaluări
- Cursul 3 Cutia de VitezeccaDocument46 paginiCursul 3 Cutia de VitezeccageorgehentÎncă nu există evaluări
- 2 Sistemul de Frânare Al AutomobiluluiDocument22 pagini2 Sistemul de Frânare Al Automobiluluigeorgehent100% (1)
- Curs 3 Echilibrarea MotoarelorDocument8 paginiCurs 3 Echilibrarea Motoarelorgeorgehent100% (1)
- 7transmisia LongitudinalaDocument21 pagini7transmisia Longitudinalageorgehent100% (4)
- Curs 1. Cinematic A Mecanismului Biela ManivelaDocument8 paginiCurs 1. Cinematic A Mecanismului Biela Manivelageorgehent100% (2)
- 1sistemul de DirectieDocument28 pagini1sistemul de Directiegeorgehent100% (1)
- Cursul 2 Dinamica Mecanismului MotoDocument17 paginiCursul 2 Dinamica Mecanismului MotogeorgehentÎncă nu există evaluări
- Constructia Motoarelor Pentru AutomobileDocument92 paginiConstructia Motoarelor Pentru AutomobilegeorgehentÎncă nu există evaluări
- CuprinsDocument4 paginiCuprinsgeorgehentÎncă nu există evaluări
- 5 - Cuplaje Curs Organe de Masini 2Document40 pagini5 - Cuplaje Curs Organe de Masini 2EdencoloreÎncă nu există evaluări
- Transmisii AutomateDocument34 paginiTransmisii AutomatevladyatorulÎncă nu există evaluări
- 6 EtansariDocument34 pagini6 Etansarigeorgehent100% (2)
- 3 CureleDocument16 pagini3 CurelegeorgehentÎncă nu există evaluări
- 4 RulmentiDocument22 pagini4 Rulmenticriss_calinÎncă nu există evaluări
- Transmisii AutomateDocument34 paginiTransmisii AutomatevladyatorulÎncă nu există evaluări
- 2 TransmisiiDocument16 pagini2 TransmisiigeorgehentÎncă nu există evaluări
- 1 AngrenajeDocument66 pagini1 AngrenajeMihaela MoianuÎncă nu există evaluări
- Autopropulsarea Autovehiculelor Pe RotiDocument230 paginiAutopropulsarea Autovehiculelor Pe RotigeorgehentÎncă nu există evaluări
- MecanicaDocument90 paginiMecanicacrdiÎncă nu există evaluări
- Dictionar de Termeni TeologiciDocument87 paginiDictionar de Termeni TeologiciDubei VioricaÎncă nu există evaluări
- Autopropulsarea Autovehiculelor Pe RotiDocument230 paginiAutopropulsarea Autovehiculelor Pe RotigeorgehentÎncă nu există evaluări