S-ar putea să vă placă și
- Miscare Circulara - Miscare OscilatorieDocument4 paginiMiscare Circulara - Miscare Oscilatoriecristina ctjÎncă nu există evaluări
- Factorul de Calitate Al CircuituluiDocument2 paginiFactorul de Calitate Al CircuituluiTobescu Elena AlexandraÎncă nu există evaluări
- Fisier Sef PDFDocument66 paginiFisier Sef PDFLaurentiu NicuÎncă nu există evaluări
- Colocviu DSMDocument3 paginiColocviu DSMShtefDraganÎncă nu există evaluări
- Vector de Pozitie Al MijloculuiDocument1 paginăVector de Pozitie Al MijloculuiMihai LazărÎncă nu există evaluări
- Legi de ConservareDocument12 paginiLegi de ConservareAnonymous 67EwtOkÎncă nu există evaluări
- Curs 01 - Mecanisme - Cinematica RigiduluiDocument20 paginiCurs 01 - Mecanisme - Cinematica RigiduluiBogdan RaduÎncă nu există evaluări
- Curs 3-20.10.2020Document5 paginiCurs 3-20.10.2020alina.kovacs00Încă nu există evaluări
- Teoria Relativitatii RestranseDocument2 paginiTeoria Relativitatii RestranseVictor TrocanÎncă nu există evaluări
- 10 C5 C6 AHP 2022 2023 ProcDocument20 pagini10 C5 C6 AHP 2022 2023 ProcSorin CretuÎncă nu există evaluări
- Teoria Relativitatii Restranse Introducere Transformari LorentzDocument17 paginiTeoria Relativitatii Restranse Introducere Transformari LorentzBogdan GorganÎncă nu există evaluări
- Seminar 12Document11 paginiSeminar 12Andreea CristinaÎncă nu există evaluări
- Ceva Si MenelausDocument8 paginiCeva Si MenelausAlin-Florin DanciuÎncă nu există evaluări
- Solicitari VariabileDocument11 paginiSolicitari VariabileOllyynÎncă nu există evaluări
- Curentul Electric Alternativ. Circuite RLC În Curent Alternativ. Puterea În Curent Alternativ. RezonantaDocument9 paginiCurentul Electric Alternativ. Circuite RLC În Curent Alternativ. Puterea În Curent Alternativ. Rezonantaprimultim100% (1)
- Miscarea Rectilinie Uniforma, Miscarea Rectilinie Uniform Variata, Miscarea Circulara UniformaDocument4 paginiMiscarea Rectilinie Uniforma, Miscarea Rectilinie Uniform Variata, Miscarea Circulara Uniformaprimultim100% (1)
- Tema 3 TabeleDocument5 paginiTema 3 TabeleIrina BeregoiÎncă nu există evaluări
- Seminar 11Document27 paginiSeminar 11Andreea CristinaÎncă nu există evaluări
- Curs 4 - ProbabilitatiDocument4 paginiCurs 4 - ProbabilitatiAndrei MăzărelÎncă nu există evaluări
- Seminar 9Document8 paginiSeminar 9Andreea CristinaÎncă nu există evaluări
- Teoria Formala A UndelorDocument66 paginiTeoria Formala A UndelorBogdan GorganÎncă nu există evaluări
- Exemple Probleme Rezolvate Statica Solidului Rigid (Fără Frecare)Document16 paginiExemple Probleme Rezolvate Statica Solidului Rigid (Fără Frecare)Diaconu RazvanÎncă nu există evaluări
- Metoda Diferentelor FiniteDocument14 paginiMetoda Diferentelor FiniteDiana Maria Gavriloiu100% (1)
- Relatia Masa EnergiexiiDocument5 paginiRelatia Masa EnergiexiiIonPodaruÎncă nu există evaluări
- SEM. 12 RecapitulareDocument27 paginiSEM. 12 Recapitulareionascuariana21Încă nu există evaluări
- Integrale Improprii 1Document25 paginiIntegrale Improprii 1Dana HordeiÎncă nu există evaluări
- Oscilaţii: Proprietăţi Elastice Proprietăţi InerţialeDocument8 paginiOscilaţii: Proprietăţi Elastice Proprietăţi InerţialeProdea SebastianÎncă nu există evaluări
- Seminar 6Document17 paginiSeminar 6Cătălin GealapuÎncă nu există evaluări
- Curs 5Document5 paginiCurs 5Iulia MariaÎncă nu există evaluări
- Termodinamica Formule - AutosavedDocument2 paginiTermodinamica Formule - Autosavedmarri10pÎncă nu există evaluări
- Formule MecanicăDocument10 paginiFormule MecanicăMona ArdeleanuÎncă nu există evaluări
- 03 TeoriaCircuitelor Trifazat Curs3Document18 pagini03 TeoriaCircuitelor Trifazat Curs3Mihai DariusÎncă nu există evaluări
- Elemente de Trigonometrie - C RebegelDocument7 paginiElemente de Trigonometrie - C RebegelAlexandra ChenacÎncă nu există evaluări
- Olimpiada de Matematică ETAPA LOCALĂ, 11.02.2023 Clasa A Viii-A Soluţii Şi Bareme OrientativeDocument2 paginiOlimpiada de Matematică ETAPA LOCALĂ, 11.02.2023 Clasa A Viii-A Soluţii Şi Bareme OrientativeRadita AlexÎncă nu există evaluări
- Formule Simulare En8Document1 paginăFormule Simulare En8cristiÎncă nu există evaluări
- Echilibrul ChimicDocument17 paginiEchilibrul ChimicMihaela CovaliÎncă nu există evaluări
- Miscarea Solidului Rigid Cu Axa Fixa. Momente de Inertie. Pendulul FizicDocument6 paginiMiscarea Solidului Rigid Cu Axa Fixa. Momente de Inertie. Pendulul Fizicprimultim50% (4)
- 1&2 - Cinematica Punctului Material - Miscarea Rectilinie Si Curbilinie UniformaDocument6 pagini1&2 - Cinematica Punctului Material - Miscarea Rectilinie Si Curbilinie UniformaprimultimÎncă nu există evaluări
- Seminar 6Document4 paginiSeminar 6Andoni Bogdan-GeorgeÎncă nu există evaluări
- Statistica 221116 230043Document73 paginiStatistica 221116 230043Lorena TuranscheÎncă nu există evaluări
- Final FinalDocument21 paginiFinal FinalPaisie RusuÎncă nu există evaluări
- C2 AnalizaDocument5 paginiC2 AnalizaAndrei Petrea19Încă nu există evaluări
- Leave!: Legea Energiei Antemporale Valabilă EntitățilorDocument9 paginiLeave!: Legea Energiei Antemporale Valabilă EntitățilorPaisie RusuÎncă nu există evaluări
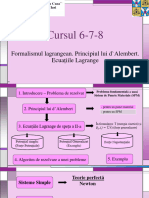
- Formalismul Lagrangean c6 8Document24 paginiFormalismul Lagrangean c6 8Not DavidÎncă nu există evaluări
- Cinematica Punctului Material - Miscarea Rectilinie Si CurbilinieDocument8 paginiCinematica Punctului Material - Miscarea Rectilinie Si Curbilinieprimultim100% (7)
- Procese Hidrodinamice-Curs 15.11Document18 paginiProcese Hidrodinamice-Curs 15.11Ovy NitaÎncă nu există evaluări
- Curs 6Document8 paginiCurs 6Razvan PahontuÎncă nu există evaluări
- Seminar 2-Integrale Curbilinii PDFDocument32 paginiSeminar 2-Integrale Curbilinii PDFTudor Rotariu100% (1)
- Referat Transformarile LorentzDocument3 paginiReferat Transformarile LorentzAndrei AldeaÎncă nu există evaluări
- Portofoliu FizicaDocument10 paginiPortofoliu FizicaValeriu DumitrascuÎncă nu există evaluări
- Proiect MatematicaDocument19 paginiProiect MatematicaPaisie RusuÎncă nu există evaluări
- Seminar 1 - FormuleDocument2 paginiSeminar 1 - FormuleCodruta DirjanÎncă nu există evaluări
- Curs 4 MecanicaDocument23 paginiCurs 4 MecanicaCayuss CayussÎncă nu există evaluări
- MEF - Prezentarea 5.1Document5 paginiMEF - Prezentarea 5.1radu2205Încă nu există evaluări
- Formule de CalculDocument3 paginiFormule de CalculDragos CoretchiÎncă nu există evaluări
- Formule BiomecatronicăDocument2 paginiFormule BiomecatronicăcristichiraxÎncă nu există evaluări
- Curs 5Document12 paginiCurs 5Stefan CalinÎncă nu există evaluări
- Deformari Elastice Izotrope. Legea Lui Hooke. Energia Potentiala ElasticaDocument6 paginiDeformari Elastice Izotrope. Legea Lui Hooke. Energia Potentiala ElasticaprimultimÎncă nu există evaluări
- M-IS - CAP 2 - Sist LINIARE Cu 1-GLDDocument53 paginiM-IS - CAP 2 - Sist LINIARE Cu 1-GLDralucaÎncă nu există evaluări
- Curs 5Document9 paginiCurs 5Bogdan GorganÎncă nu există evaluări
- Transfer de Caldura Și Masa CD 1Document22 paginiTransfer de Caldura Și Masa CD 1Bogdan GorganÎncă nu există evaluări
- Transfer de Caldura Și Masa CD 2Document16 paginiTransfer de Caldura Și Masa CD 2Bogdan GorganÎncă nu există evaluări
- Transfer de Caldura Și Masa CD 3Document10 paginiTransfer de Caldura Și Masa CD 3Bogdan GorganÎncă nu există evaluări
- Toe& R: Semingr - 3: Serii de Numere Reale. Siruri de FunctiiDocument8 paginiToe& R: Semingr - 3: Serii de Numere Reale. Siruri de FunctiiBogdan GorganÎncă nu există evaluări
- Transfer de Caldura Și Masa CV1Document17 paginiTransfer de Caldura Și Masa CV1Bogdan GorganÎncă nu există evaluări
- Teoria Relativitatii Restranse Cinematica RelativistaDocument16 paginiTeoria Relativitatii Restranse Cinematica RelativistaBogdan GorganÎncă nu există evaluări
- Curs 2Document4 paginiCurs 2Bogdan GorganÎncă nu există evaluări
- Curs 3Document13 paginiCurs 3Bogdan GorganÎncă nu există evaluări
- Teoria Relativitatii Restranse Introducere Transformari LorentzDocument17 paginiTeoria Relativitatii Restranse Introducere Transformari LorentzBogdan GorganÎncă nu există evaluări
- Curs 1Document6 paginiCurs 1Bogdan GorganÎncă nu există evaluări
- Curs 1 - Componente, Circuite Si SemnaleDocument19 paginiCurs 1 - Componente, Circuite Si SemnaleBogdan GorganÎncă nu există evaluări
- Curs 4Document11 paginiCurs 4Bogdan GorganÎncă nu există evaluări
- Teoria Relativitatii Restranse Spatiul MinkowskiDocument16 paginiTeoria Relativitatii Restranse Spatiul MinkowskiBogdan GorganÎncă nu există evaluări
- Curs 4 - TBJ-partea A II-aDocument12 paginiCurs 4 - TBJ-partea A II-aBogdan GorganÎncă nu există evaluări
- Algebra - Curs - Drepte Si PlaneDocument6 paginiAlgebra - Curs - Drepte Si PlaneBogdan GorganÎncă nu există evaluări
- Teoria Formala A UndelorDocument66 paginiTeoria Formala A UndelorBogdan GorganÎncă nu există evaluări
- Curs 5 - Amplificatoare de C.A. Si C.CDocument17 paginiCurs 5 - Amplificatoare de C.A. Si C.CAndrei VasileÎncă nu există evaluări
- Curs 6 - Teoria ReactieiDocument19 paginiCurs 6 - Teoria ReactieiBogdan GorganÎncă nu există evaluări
- Algebra Curs 1Document12 paginiAlgebra Curs 1Bogdan GorganÎncă nu există evaluări
- Curs 2 - DiodaDocument16 paginiCurs 2 - DiodaBogdan GorganÎncă nu există evaluări
- Curs 1-12Document210 paginiCurs 1-12Bogdan Gorgan100% (1)
- Curs 3 - TBJ-partea I - Revizuit 20.10.2021Document16 paginiCurs 3 - TBJ-partea I - Revizuit 20.10.2021Bogdan GorganÎncă nu există evaluări
- Algebra Curs 2Document12 paginiAlgebra Curs 2Bogdan GorganÎncă nu există evaluări
- Curs 1 - ChimieDocument23 paginiCurs 1 - ChimieBogdan GorganÎncă nu există evaluări
- Curs 2 - ChimieDocument13 paginiCurs 2 - ChimieBogdan GorganÎncă nu există evaluări
- Curs 3 ChimieDocument18 paginiCurs 3 ChimieBogdan GorganÎncă nu există evaluări
- Curs 5 - ChimieDocument14 paginiCurs 5 - ChimieBogdan GorganÎncă nu există evaluări
- Curs 4 - ChimieDocument17 paginiCurs 4 - ChimieBogdan GorganÎncă nu există evaluări