N.R.
curs 2
Forme de prezentare a imaginii
şi
Mişcãrii Radar
• Forme de prezentare a imaginii radar
North UP
Head UP
Course UP
• Forme de prezentare a Mişcãrii Radar
Relative Motion
True Motion
Stabilizarea imaginii radar
• Atunci când discutãm de stabilizarea imaginii radar, ne referim la axa de referinţã faţã de
care se raporteazã gradaţia 0 de pe cercul azimutal al ecranului radar.
• Din acest punct de vedere în navigaţia radar sunt utilizate trei tipuri de referinţã :
1. Imagine stabilizatã faţã de direcţia Nord
2. Imagine stabilizatã faţã de linia prova
3. Imagine stabilizatã faţã de drumul navei
1. Imaginea stabilizatã faţã de direcţia Nord
1
�N.R. curs 2
• În terminologia din limba englezã, stabilizarea imaginii faţã de direcţia Nord se numeşte:
“North-up”, prescurtarea fiind “ N’UP ”.
• O astfel de stabilizare a imaginii radar se poate realiza numai în situaţia în care
echipamentul radar este cuplat cu girocompasul.
• Realizându-se aceastã conectare a celor douã aparate, radarul preia informaţia de direcţie
direct de la girocompas, cercul azimutal al ecranului radar devenind un repetitor giro.
• Imaginea radar se stabilizeazã faţã de Ng.
• Astfel, în cazul în care corecţia girocompasului este diferitã de 0 , relevmentele radar şi
drumurile afişate pentru nava proprie sau pentru diversele ţinte sunt drumuri giro.
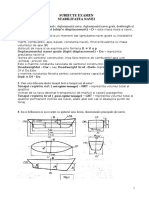
Caracteristicile sistemului de stabilizare N’UP
• gradaţia zero a cercului azimutal radar corespunde direcţiei Ng;
• valorile indicate sau mãsurate pentru drumuri sau relevmente sunt corespunzãtoare
drumurilor şi relevmentelor giro (Dg, Rg);
• drumul navei proprii apare ca o linie continuã, cu originea în centrul imaginii radar şi
orientatã pe o direcţie corespunzãtoare valorii sale;
• relevmentul radar (EBL) este reprezentat de obicei printr-o linie punctatã.
• imaginea radar fiind stabilizatã faţã de direcţia Nord, imaginea de pe ecran reproduce
orientarea imaginii existentã pe hartã.
• la giraţia navei imaginea detectatã radar rãmâne stabilã (fixã).
• linia care marcheazã drumul navei proprii se va roti în sensul giraţiei navei, cu o variaţie
unghiularã corespunzãtoare schimbãrii de drum efectuate de navã.
• În cadrul navigaţiei radar se recomandã utilizarea cu precãdere a sistemului N’UP, acesta
prezentând urmãtoarele avantaje :
– imaginea radar este similarã desenului de pe hartã;
– relevmentele care se mãsoarã sunt Rg (Ra), ele putând fi trasate direct pe hartã;
– se poate determina noul direct drumul pe care urmeazã sã-l ia nava, ordonându-se
direct timonierului;
– eficacitatea operaţiilor de radar plotting este superioarã în N’UP;
– alte facilitãţi ale echipamentului radar (Hãrţi electronice, NAVLINE-nuri, etc.) nu se
pot activa decât în sistemul N’UP;
2
�N.R. curs 2
• Pânã la acomodarea cu acestã formã de prezentare a imaginii radar pot apãrea anumite situaţii
de dezorientare în interpretarea informaţiei radar, acest lucru fiind posibil în special în
situaţiile în care nava se deplaseazã în drumuri sudice.
• În astfel de cazuri, tendinţa celor puţin familiarizaţi cu sistemul N’UP este sã considere cã
reperul ( coasta, ţinta) care apare în stânga liniei care marcheazã drumului navei pe ecranul
radar, se aflã în Bd, când în realitate se aflã în Tb.
2. Imaginea stabilizatã faţã de linia prova
• Aceasta a fost prima formã de prezentare a imaginii radar o datã cu inventarea şi introducerea
lor spre utilizare în diversele domenii de aplicaţii.
• Stabilizarea imaginii radar faţã de linia prova în terminologia englezã Head Up - H’UP.
• Este independentã de indicaţia girocompasului.
3
�N.R. curs 2
• Chiar şi în cazul radarelor moderne, în momentul unei defecţiuni la interfaţa de conectare a
radarului cu girocompasul, aceasta este singura formã de prezentare a imaginii care poate fi
activatã.
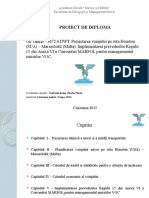
• gradaţia zero a cercului azimutal radar corespunde direcţiei liniei prova(Rp = 0°);
• drumul navei proprii apare ca o linie continuã cu originea în centrul imaginii radar,
orientatã pe gradaţia zero a cercului azimutal (linia prova);
• relevmentele radar mãsurate sunt relevmente prova cotate în sistem circular ;
• indiferent de drumul şi giraţia navei, linia prova rãmâne fixã (întotdeauna pe gradaţia zero
a cercului azimutal)
• ţintele detectate de radar şi afişate pe ecran în stânga liniei Pv vor fi în Bd, iar cele
afişate în dreapta liniei Pv vor fi în Tb (indiferent de drumul navei);
• materializarea giraţiei navei pe ecranul radar este realizatã prin rotirea întregii imagini
radar în sens invers direcţiei în care girazã nava;
• Sistemul H’UP se utilizeazã la ora actualã destul de frecvent la manevrele de pilotare
ale navei.
• Prin manevre de pilotare, înţelegem conducerea navei în zone înguste, atunci când primordialã
este menţinerea navei pe o anumitã pasã, marcatã de cele mai multe ori cu balize, iar
schimbãrile de drum care se efectueazã sunt dese şi de valori relativ mici.
• În astfel de situaţii trebuie urmãrit în primul rând bordul în care trebuie lãsate anumite
repere fixe plutitoare şi mentinerea unei distanţe laterale corespunzãtoare faţã de coastã
sau de marginile şenalului.
3. Stabilizarea imaginii faţã de drumul navei
• Acest sistem de stabilizare al imaginii (în terminologia englezã Course Up - C’UP ) este
destul de rar folosit, în primul rând datoritã faptului cã cele douã sisteme anterioare acoperã
practic necesitãţile navigaţie radar curente.
• Sistemul C’UP realizeazã un mixaj între caracteristicile sitemelor N’UP şi H’UP,
permiţând un control riguros al drumului navei şi sezizarea abaterilor acesteia de la drumul de
referinţã.
4
�N.R. curs 2
• În momentul în care se comutã radarul în sistemul C’UP, imaginea pe ecranul radar are
acelaşi aspect ca şi când s-ar fi trecut pe sistemul H’UP.
• Deci imaginea radar s-a stabilizat funcţie de valoarea drumului navei avutã în momentul
comutãrii pe C’UP, acesta fiind consideratã valoarea de referinţã.
• Schimbãrile ulterioare de drum ale navei se vor materializa pe ecran ca în sistemul
N’UP, respectiv linia care marcheazã drumul navei se va deplasa în sensul giraţiei navei
cu o valoare unghiularã corespunzãtoare schimbãrii de drum, iar imaginea detectatã radar va
rãmâne fixã, stabilizatã faţã de drumul de referinţã iniţial.
• Relevmentele radar mãsurate sunt relevmente giro sau adevãrate.
• Principalul avantaj al stabilizãrii imaginii în sistemul Course UP îl reprezintã faptul cã
imagina radar corespunde cu imaginea vizualã de pe orizont (excepţie în cazul
schimbãrilor mari de drum) şi în acelaşi timp pot fi mãsurate relevmente giro pe ecranul
radar.
• Acest tip de stabilizare al imaginii este utilizat în special atunci când radarul lucreazã în
mişcare realã, situaţie în care sistemul Head Up nu poate fi activat.
Comparaţie N’UP / H’UP / C’UP
5
�N.R. curs 2
Temã de Casã nr.1
• Transcriere Tabel comparativ elemente şi caracteristici sisteme de stabilizare a imaginii radar: N UP / H
UP / C UP.
• Atunci când se doreşte urmãrirea evenimentelor într-o situaţie de foarte mare apropiere,
esenţialã este mãsurarea distanţelor şi relevmentelor la NT şi determinarea cât mai
rapidã şi precisã a deplasãrii acesteia.
• Din tabel, reiese clar cã din acest punct de vedere stabilizarea imaginii în H’UP nu poate
oferi date exacte, ba mai mult decât atât, în situaţiile în care nava observatã îşi modificã
drumul, poate genera informaţii eronate.
• Ca urmare, sistemul H UP prezintã anumite avantaje doar în cazul pilotãrii navei, datoritã
conformitãţii imaginii de pe ecranul radar cu ceea ce se vede pe hublourile comenzii de
navigaţie.
• Dar şi acest avantaj este suplinit de modul C UP, care în plus oferã posibilitatea mãsurãrii
permanente a relevmentelor adevãrate la ţinte.
• Concluzia generalã este cã cel mai viabil sistem de stabilizare al imaginii este faţã de
direcţia Nord, el oferind toate facilitãţile atât în situaţiile de evitare a coliziunilor cât şi
pentru navigaţia curentã.
Forme de prezentare a mişcãrii radar
• Formele de prezentare ale mişcãrii radar se referã la modalitatea de interpretare a
sistemului de referinţã pentru observatorul radar, respectiv dacã imaginea radar este
6
�N.R. curs 2
interpretatã din punct de vedere al unui observator mobil sau al unui observator fix.
• Existã douã tipuri principale de interpretare şi afişare a mişcãrii radar:
1. mişcare relativã (Relative motion - RM)
2. mişcare realã (True Motion - TM).
1.Mişcarea relativã (MR)
• Mişcarea relativã are ca punct de referinţã un observator mobil, respectiv nava proprie,
care se deplaseazã cu parametrii proprii de mişcare (Drumul şi Viteza navei proprii).
• Imaginea radar prezentatã în mişcare relativã este centratã în jurul unui punct fix,
respectiv punctul observatorului mobil.
• Toate celelalte ţinte aflate în raza de bãtaie a radarului se deplaseazã pe ecranul
radarului în jurul acestui punct fix care reprezintã nava proprie.
• Deplasarea ţintelor pe ecranul radar se face dupã rezultanta parametrilor de mişcare ai
navei proprii şi ai ţintei/ţintelor respective.
• Aceastã mişcare generatã de vectorul rezultant, se numeşte mişcare relativã.
• Ca urmare, se va deplasa pe imaginea radarului aflatã în sistemul Relative Motion, cu o
vitezã relativã şi pe o direcţie relativã, diferite în general de viteza şi drumul real al ţintelor
respective.
• În ceea ce priveşte ţintele fixe, deci cele care au vitezã proprie zero, acestea vor apãrea pe
imaginea radar ca deplasându-se pe un drum paralel cu drumul navei noastre, în sens
invers şi cu o vitezã relativã egalã cu viteza realã a navei proprii.
• Forma de prezentare a imaginii radar în mişcare relativã este universal valabilã la toate tipurile
de radar, indiferent de complexitatea echipamentului.
• De altfel, radarele cu preţuri de vânzare medii nu dispun decât de aceastã formã de prezentare
a mişcãrii, deci pe majoritatea navelor comerciale se lucreazã cu radarul în MR.
• Din acest considerent, MR este consideratã ca regim standard de funcţionare pentru toate
echipamentele radar şi ca urmare toate cursurile şi examenele pentru operatori radar au la
bazã acest mod de operare.
7
�N.R. curs 2
2.Mişcarea realã (TM)
• Prezentarea imaginii radar în mişcare realã (True Motion - TM), constituie o realizare
tehnologicã relativ recentã.
• Toate modele de radare din categoria vârfurilor de serie dispun de aceastã facilitate deosebitã.
• În TM, toate ţintele, inclusiv nava proprie se deplasaseazã pe imaginea radar pe
direcţiile lor reale (faţã de Nord) şi cu vitezele reale.
• Deci punctul care reprezintã nava proprie nu mai este fix, chiar dacã imaginea radar se
poate centra în continuare în funcţie de acest punct.
• În momentul comutãrii radarului în mişcare realã, centrul imaginii se off-set-eazã (se
deplaseazã faţã de centrul geometric al cercului azimutal radar) automat, la 2/3 din diametrul
ecranului spre înapoi.
• Astfel raza de vizibilitate a radarului cãtre Pv, pe aceeaşi scalã de distanţã, se mãreşte cu 2/3
din scala de distanţã utilizatã.
• Pe durata deplasãrii navei în aceastã arie, reperele fixe rãmân imobile, pe ecranul
radarului singurele puncte în mişcare fiind ţintele mobile, inclusiv nava proprie.
• Avantajul primordial al mişcãrii reale constã în determinarea rapidã şi exactã a
deplasãrii reale a diverselor ţinte.
• Astfel, în Mişcare Realã, se poate stabili foarte repede care ţintã este mobilã şi care este
fixã şi aprecia traiectoria realã a ţintelor în mişcare.
• În cazul mişcãrii relative pentru a determina parametrii reali de mişcare ai unei ţinte este
necesarã o urmãrire şi o plotare în timp a ţintei respective.
• Din aceste considerente, dacã la bord existã un echipament radar care sã dispunã de
aceastã facilitate, se recomandã utilizarea cu precãdere a mişcãrii reale în condiţii de
navigaţie normale, în acest sistem funcţionînd şi toate celelalte facilitãţi oferite de
aparat (inclusiv ARPA şi modalitatea afişãrii hãrţilor electronice).
Consideraţii privind RM / TM
• Observarea vizualã a navelor ne oferã o imagine asupra direcţiilor lor reale de
8
�N.R. curs 2
deplasare, dar nu putem aprecia cât de aproape vor trece aceste nave pe lângã nava
noastrã.
• Din acest punct de vedere, nici radarul nu ne oferã informaţii suplimentare, exceptând cazul în
care am urmãrit evoluţia în timp a ţintelor pentru a le putea determina traiectoriile lor relative.
• Cu toate acestea, corelarea imaginii radar cu observaţia vizualã oferã de cele mai multe ori
mult mai multe informaţii şi într-un interval de timp mult mai mic, decât în cazul în care
observarea ţintelor se poate face numai prin intermediul radarului.
• De aceea navigaţia în condiţii de vizibilitate redusã şi mai ales în zone cu trafic mare ridicã
foarte multe probleme Ofiţerului de cart.
• Observarea vizualã, imaginile radar în Mişcare relativã şi imaginea de ansamblu
prezentatã în Mişcare realã, constituie maximul de informaţie pe care-l poate avea la
dispoziţie Ofiţerul de cart în evaluarea unei situaţii existente la un moment dat în zona
în care navigã.
• Din pãcate nu întotdeauna toate aceste informaţii pot fi obţinute simultan.
• De exemplu, în condiţii de vizibilitate redusã, suntem limitaţi la observaţiile radar sau radarul
pe care-l avem la bord nu poate afişa imaginea decât în Mişcare relativã.
• Inclusiv imaginea radar poate fi uneori neclarã în cazul în care din cauza condiţiilor
meteorologice propagarea undei radar este perturbatã.
• Important din punct de vedere al Ofiţerului de cart este sã extragã şi sã interpreteze
corect informaţiile disponibile, astfel încât decizia sa sã se bazeze pe o apreciere corectã
a situaţia existente.
• În momentul preluãrii cartului de navigaţie sau atunci când pe puntea de comandã sunt doi
ofiţeri, trebuie verificat modul în care este afişatã mişcarea radar, precum şi modul de
stabilizare al imaginii radar.
• Fiecare ofiţer de punte are un mod preferat de a regla radarul în raport cu aceste douã
elemente.
• Ca urmare, nu trebuie sã presupunem cã şi celãlalt ofiţer, în momentul în care a utilizat
radarul, a folosit acelaşi tip de reglaj pe care l-am setat noi anterior.