S-ar putea să vă placă și
- Referat Integrale de SuprafataDocument15 paginiReferat Integrale de SuprafataPetre Sachelaru100% (1)
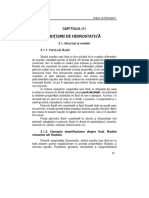
- 3.1.1. Particula FluidăDocument19 pagini3.1.1. Particula FluidăMr CrossplaneÎncă nu există evaluări
- Modelarea Matematică A Curgerii În AcvifereDocument30 paginiModelarea Matematică A Curgerii În AcvifereGabriela PopaÎncă nu există evaluări
- CURS-2Document8 paginiCURS-2Andrei Bogdan BustiucÎncă nu există evaluări
- HidrostaticaDocument133 paginiHidrostaticaIrina CretuÎncă nu există evaluări
- CAP5Document18 paginiCAP5Laurentiu NiculaiÎncă nu există evaluări
- Cursul 6Document7 paginiCursul 6Marian DumitruÎncă nu există evaluări
- Forte Conservative Energia PotentialaDocument11 paginiForte Conservative Energia PotentialaCos_sensÎncă nu există evaluări
- MFMH SubiecteDocument24 paginiMFMH SubiecteJustin RussellÎncă nu există evaluări
- Geotehnica-Partea IIDocument58 paginiGeotehnica-Partea IIAmer Adel ArtimonÎncă nu există evaluări
- Hidraulica Torentiala - Forte de Presiunepe Pereti PlaniDocument8 paginiHidraulica Torentiala - Forte de Presiunepe Pereti PlaniVasile MotoraÎncă nu există evaluări
- Statica FluidelorDocument10 paginiStatica FluidelorAlexutza LexÎncă nu există evaluări
- HidrodinamiceDocument18 paginiHidrodinamicemadalinaÎncă nu există evaluări
- 08 - PL Âci Curbe Sub+úiriDocument8 pagini08 - PL Âci Curbe Sub+úiriCristian BlanaruÎncă nu există evaluări
- Energia Transportata de Undele ElasticeDocument3 paginiEnergia Transportata de Undele ElasticeSergiu100% (1)
- Cap.2 Si 3. Starea de Eforturi Unitare - Legile Deformare PlasticaDocument22 paginiCap.2 Si 3. Starea de Eforturi Unitare - Legile Deformare Plasticamyaaa94Încă nu există evaluări
- Osc Pe Dir Verticala, de Tangaj, de Ruliu PDFDocument19 paginiOsc Pe Dir Verticala, de Tangaj, de Ruliu PDFAndreea GheorghiuÎncă nu există evaluări
- Mecanica - Tehnol.Document3 paginiMecanica - Tehnol.loredanaÎncă nu există evaluări
- Hidrodinamica Apelor Subterane. Acvifere Sub Presiune..Document18 paginiHidrodinamica Apelor Subterane. Acvifere Sub Presiune..vrajealalukyanÎncă nu există evaluări
- Elasticitate Plana in Coordonate PolareDocument23 paginiElasticitate Plana in Coordonate PolareCatalin CÎncă nu există evaluări
- Intrebari+raspunsuri HTVJDocument7 paginiIntrebari+raspunsuri HTVJMocanu BiancaÎncă nu există evaluări
- Curs 2 PDFDocument9 paginiCurs 2 PDFBiankaSchreierÎncă nu există evaluări
- Notiuni Generale de Teoria ElasticitatiiDocument57 paginiNotiuni Generale de Teoria Elasticitatiimihalache_cristianÎncă nu există evaluări
- Plasticitate Note de Curs. C2.: Cadru Didactic Titular, Conf. Univ. Dr. Ing. Carmen-Penelopi PapadatuDocument19 paginiPlasticitate Note de Curs. C2.: Cadru Didactic Titular, Conf. Univ. Dr. Ing. Carmen-Penelopi Papadatudragos_obrejaÎncă nu există evaluări
- Unitatea 3 - HTVDocument13 paginiUnitatea 3 - HTVAlexandru ManoleÎncă nu există evaluări
- Cursul 9 NescufundabilitateaDocument15 paginiCursul 9 NescufundabilitateaLupikå LpkÎncă nu există evaluări
- Elemente de Teoria ElasticitatiiDocument74 paginiElemente de Teoria ElasticitatiiSimon Robert0% (1)
- Capitolul 3Document35 paginiCapitolul 3Cosmin Gabriel ToaderÎncă nu există evaluări
- Tema 14 Teoria Sitelor Plane.Document8 paginiTema 14 Teoria Sitelor Plane.Boris NÎncă nu există evaluări
- Curs 1 Cartog. Mat. 2o16Document6 paginiCurs 1 Cartog. Mat. 2o16Petric AdrianÎncă nu există evaluări
- 7.ecuatia Fundamentala A HidrotaticiiDocument1 pagină7.ecuatia Fundamentala A Hidrotaticiigabi25Încă nu există evaluări
- Osfortat PDFDocument8 paginiOsfortat PDFGrigoras CosminÎncă nu există evaluări
- Capitolul 2Document68 paginiCapitolul 2Oana MunteanÎncă nu există evaluări
- Transfer de ImpulsDocument33 paginiTransfer de ImpulsMihaiÎncă nu există evaluări
- Integrale Triple PDFDocument11 paginiIntegrale Triple PDFCristian AndreiÎncă nu există evaluări
- Bazele ElectrotehniciiDocument16 paginiBazele ElectrotehniciiAndrei MadalinÎncă nu există evaluări
- Electrotehnica II - Capitolul 5Document21 paginiElectrotehnica II - Capitolul 5unukrysÎncă nu există evaluări
- 3 Dinamica FluidelorDocument11 pagini3 Dinamica FluidelorTudor GrigorasÎncă nu există evaluări
- Prelegerea 12Document17 paginiPrelegerea 12Jitariu Constantin-GeorgeÎncă nu există evaluări
- Instalatia de Ancorare Manevra LegareDocument16 paginiInstalatia de Ancorare Manevra LegareSorescu Radu VasileÎncă nu există evaluări
- Fenomene de Transport in Fluide BiologiceDocument13 paginiFenomene de Transport in Fluide BiologiceFetcu AndreiÎncă nu există evaluări
- Fizica Moleculara Si TermodinamicaDocument40 paginiFizica Moleculara Si Termodinamicacrissssy0% (3)
- PU16 Unde Elastice. Ecuația de Unda. Propagarea Undelor Elastice in Medii.Document12 paginiPU16 Unde Elastice. Ecuația de Unda. Propagarea Undelor Elastice in Medii.Dumitru NegaraÎncă nu există evaluări
- Mecanica Mediilor Continue. Unde ElasticeDocument19 paginiMecanica Mediilor Continue. Unde ElasticeDaNy3lMatheoÎncă nu există evaluări
- Momente de InertieDocument7 paginiMomente de InertieCristina ResceanuÎncă nu există evaluări
- Mecanica Fluidelor T2Document9 paginiMecanica Fluidelor T2Očtáv VátčoÎncă nu există evaluări
- Unde Elastice Plane in Medii Omogene Si Izotrope, Unde Longitudinale Si Transversale, Viteza Undelor, Ecuatia Undei PlaneDocument19 paginiUnde Elastice Plane in Medii Omogene Si Izotrope, Unde Longitudinale Si Transversale, Viteza Undelor, Ecuatia Undei Planeprimultim100% (3)
- Geodezie I CursDocument66 paginiGeodezie I CursViorela M BogatinoviciÎncă nu există evaluări
- Cap 2Document32 paginiCap 2meia100% (1)
- Curgerea Laminară Prin MicrocanaleDocument16 paginiCurgerea Laminară Prin MicrocanaleFetcu AndreiÎncă nu există evaluări
- cuplareLA+mont ReductoareDocument17 paginicuplareLA+mont ReductoareCrasneanu Mariana IonelaÎncă nu există evaluări
- Subiecte TMRIN II-02Document1 paginăSubiecte TMRIN II-02Crasneanu Mariana IonelaÎncă nu există evaluări
- Submarine NucleareDocument19 paginiSubmarine NucleareCrasneanu Mariana IonelaÎncă nu există evaluări
- Descriere-Tehnica PetrolierDocument7 paginiDescriere-Tehnica PetrolierCrasneanu Mariana IonelaÎncă nu există evaluări
- Pierderi Generale Si LocaleDocument35 paginiPierderi Generale Si LocaleCrasneanu Mariana IonelaÎncă nu există evaluări
- Probeme P4Document1 paginăProbeme P4Crasneanu Mariana IonelaÎncă nu există evaluări
- 13.inst GuvernareDocument41 pagini13.inst GuvernarefghdhmdkhÎncă nu există evaluări
- Aplicatii TN1 - II: Plutirea 4 Semilăţimea (M) 2,6 7,8 8,4 8,8 9,0Document1 paginăAplicatii TN1 - II: Plutirea 4 Semilăţimea (M) 2,6 7,8 8,4 8,8 9,0Crasneanu Mariana IonelaÎncă nu există evaluări
- Seminar A Plic at IV SSNDocument148 paginiSeminar A Plic at IV SSNCrasneanu Mariana IonelaÎncă nu există evaluări
- Structura PR Licenta SenDocument1 paginăStructura PR Licenta SenPaula-Nicoleta VieruÎncă nu există evaluări
- Probleme p5.1Document1 paginăProbleme p5.1Crasneanu Mariana IonelaÎncă nu există evaluări
- Probleme p3Document1 paginăProbleme p3Crasneanu Mariana IonelaÎncă nu există evaluări
- Montarea Instalatiilor NavaleDocument18 paginiMontarea Instalatiilor NavaleCrasneanu Mariana IonelaÎncă nu există evaluări
- Instalații Și Echipamente Specifice Navelor Petroliere Bobîrcă Mădălin Marian PrezentareDocument10 paginiInstalații Și Echipamente Specifice Navelor Petroliere Bobîrcă Mădălin Marian PrezentareCrasneanu Mariana IonelaÎncă nu există evaluări
- 10.inst PetroliereDocument11 pagini10.inst PetroliereLupikå LpkÎncă nu există evaluări
- Instalatia de VentilatieDocument9 paginiInstalatia de VentilatieCrasneanu Mariana IonelaÎncă nu există evaluări
- Pompe AxialeDocument8 paginiPompe AxialeCrasneanu Mariana IonelaÎncă nu există evaluări
- 9.inst SanitareDocument12 pagini9.inst SanitareLupikå LpkÎncă nu există evaluări
- Repararea Instalatiilor NavaleDocument10 paginiRepararea Instalatiilor NavaleCrasneanu Mariana IonelaÎncă nu există evaluări
- Pompe AxialeDocument8 paginiPompe AxialeCrasneanu Mariana IonelaÎncă nu există evaluări
- Instalatiile Pentru Prevenirea Si Stingerea IncendiilorDocument18 paginiInstalatiile Pentru Prevenirea Si Stingerea IncendiilorCrasneanu Mariana IonelaÎncă nu există evaluări
- IM Complet PDFDocument473 paginiIM Complet PDFCrasneanu Mariana IonelaÎncă nu există evaluări
- Calculul Instalatiilor Cu Tubulaturi PDFDocument19 paginiCalculul Instalatiilor Cu Tubulaturi PDFMarianaÎncă nu există evaluări
- CURS-4.1 Instalații NavaleDocument16 paginiCURS-4.1 Instalații NavaleCrasneanu Mariana IonelaÎncă nu există evaluări
- Instalatia de Stins Incendiu Cu CO2Document10 paginiInstalatia de Stins Incendiu Cu CO2Crasneanu Mariana IonelaÎncă nu există evaluări
- 20.inst de Remozzzzrcaj Si TraulareDocument19 pagini20.inst de Remozzzzrcaj Si TraulareMunteanu Sylvèr RobèrtÎncă nu există evaluări
- Calculul Instalatiilor Cu Tubulaturi PDFDocument19 paginiCalculul Instalatiilor Cu Tubulaturi PDFMarianaÎncă nu există evaluări
- Tematica1 PDFDocument2 paginiTematica1 PDFCrasneanu Mariana IonelaÎncă nu există evaluări
- CURS-4 Instalații NavaleDocument29 paginiCURS-4 Instalații NavaleCrasneanu Mariana Ionela100% (1)