Documente Academic
Documente Profesional
Documente Cultură
Dinamica Proiect
Încărcat de
radoo9Titlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Dinamica Proiect
Încărcat de
radoo9Drepturi de autor:
Formate disponibile
UNIVERSITATEA DIN ORADEA
FACULTATEA DE INGINERIE MANAGERIALA SI
TEHNOLOGICA
Proiect la
Dinamica autovehiculelor
Anul III
ndrumtor: Student:
Studierea performanelor dinamice
i calitile de stabilitate ale
autovehiculului Alfa Romeo Spider
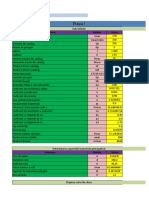
Caracteristicile tehnice ale autovehiculului sunt:
1.Motorul
-cilindreea: 1490 [cm
3
]
-puterea maxim: 77 [KW]
-turaia la puterea maxim: 6000 [rot/min]
-momentul maxim: 133 [Nm]
-turaia la moment maxim: 4000 [rot/min]
2.Transmisia
-tipul cutiei de vitez: manual
-tipul ambreiajului: monodisc
-raportul de transmitere al transmisiei principale: i
0
=4.11
-raportul de transmitere al cutiei de viteze i
cv1
=3.75
i
cv2
=2.05
i
cv3
=1.38
i
cv4
=1.01
i
cv5
=0.82
3.asiul
-tipul asiului: autoportant
-frne -fa: disc
-spate: tambur
-direcie: cremaliera
4.Dimensiuni i greutate
-dimensiuni de gabarit
-lungimea: 4,10 [m]
-limea: 1,62 [m]
-nlimea: 1,42 [m]
-ampatamentul: 2,45 [m]
-ecartamentul: -fa: 1,40 [m]
-spate: 1,36 [m]
-pneuri: 185/60 R14 H
-greutate proprie: 9100 [N]
5.Performane
-viteza maxim: 180 [Km/h]
-demarajul (0100 [Km/h]): 14,0 [s]
-consum mediu pe 100 [Km/h] in: - oras 8.2 litri
- in afara orasului 6.3 litri
- mediu 6,5 litri
Cap.I.
Dimensiunile principale ale autovehiculelor
n figura 1.1. sunt prezentate principalele dimensiuni geometrice ale automobilului, conform
STAS 6689/2-80.
Lungimea A, reprezint distana dintre dou plane verticale, perpendiculare pe planul
longitudinal de simetrie al automobilului i tangente la punctele extreme din fa i din spate.
Toate elementele din faa sau din spatele automobilului (crlige de traciunee, bare de
protecie) sunt incluse n aceste dou plane.
Limea l, reprezint distana dintre dou plane verticale i paralele cu planul longitudinal de
simetrie, tangente la automobil, de o parte i de alta a sa. Toate organele laterale ale
automobilului fixate rigid, cu excepia oglinzilor retrovizoare, sunt cuprinse ntre aceste dou
plane.
nlimea autovehiculului, H, reprezint distana dintre planul su de sprijin i planul
orizontal tangent la partea superioar a automobilului, fr ncrctur cu pneurile umflate la
presiunea indicat de productor.
Ampatamentul, L, reprezint distana dintre axele geometrice ale punilor automobilului. n
cazul automobilelor cu trei puni ampatamentul se definete ca distana dintre axa punii fa
i jumtatea distanei celor dou puni din spate. Ampatamentul autovehiculelor cu mai mult
de trei puni se definete ca suma distanelor consecutive dintre axele punilor, ncepnd cu
puntea din fa. La automobilele care tracteaz semiremorci ampatamentul se calculeaz cu
suma dintre distana de la axa punii fa la axa pivotului de traciune i distana dintre aceasta
i planul vertical ce trece prin axa primei osii a semiremorcii.
Ecartamentul B, reprezint distana dintre planele mediane ale roilor aceleiai puni. n cazul
roilor spate echipate cu roi duble, ecartamentul se definete ca fiind distana dintre planele
perpendiculare pe calea de rulare paralele cu planul de simetrie al automobilului, care trec la
jumtatea distanei dintre roile de pe aceeai parte a punii respective.
Consola fa, l1, reprezint distana dintre dou plane verticale transversale, care trec,
respectiv, prin punctul extrem din fa al automobilului i prin axa punii fa (fig. 1.2.)
Consola spate, l2, reprezint distana dintre dou plane verticale transversale, care trec,
respectiv, prin punctul extrem din spate al automobilului i axa punii spate (fig. 1.2.).
Fig. 1.1
n figura 1.2. sunt prezentate principalele dimensiuni geometrice ale automobilului, conform
STAS 6689/2-80.
Lungimea A, reprezint distana dintre dou plane verticale, perpendiculare pe planul
longitudinal de simetrie al automobilului i tangente la punctele extreme din fa i din spate.
Toate elementele din faa sau din spatele automobilului (crlige de traciunee, bare de
protecie) sunt incluse n aceste dou plane.
Limea l, reprezint distana dintre dou plane verticale i paralele cu planul longitudinal de
simetrie, tangente la automobil, de o parte i de alta a sa. Toate organele laterale ale
automobilului fixate rigid, cu excepia oglinzilor retrovizoare, sunt cuprinse ntre aceste dou
plane.
nlimea autovehiculului, H, reprezint distana dintre planul su de sprijin i planul
orizontal tangent la partea superioar a automobilului, fr ncrctur cu pneurile umflate la
presiunea indicat de productor.
Ampatamentul, L, reprezint distana dintre axele geometrice ale punilor automobilului. n
cazul automobilelor cu trei puni ampatamentul se definete ca distana dintre axa punii fa
i jumtatea distanei celor dou puni din spate. Ampatamentul autovehiculelor cu mai mult
de trei puni se definete ca suma distanelor consecutive dintre axele punilor, ncepnd cu
puntea din fa. La automobilele care tracteaz semiremorci ampatamentul se calculeaz cu
suma dintre distana de la axa punii fa la axa pivotului de traciune i distana dintre aceasta
i planul vertical ce trece prin axa primei osii a semiremorcii.
Ecartamentul B, reprezint distana dintre planele mediane ale roilor aceleiai puni. n cazul
roilor spate echipate cu roi duble, ecartamentul se definete ca fiind distana dintre planele
perpendiculare pe calea de rulare paralele cu planul de simetrie al automobilului, care trec la
jumtatea distanei dintre roile de pe aceeai parte a punii respective.
Consola fa, l1, reprezint distana dintre dou plane verticale transversale, care trec,
respectiv, prin punctul extrem din fa al automobilului i prin axa punii fa (fig. 1.2.)
Consola spate, l2, reprezint distana dintre dou plane verticale transversale, care trec,
respectiv, prin punctul extrem din spate al automobilului i axa punii spate (fig. 1.2.).
Caracteristicile geometrice ale capacitii de trecere a automobilului
Capacitatea de trecere a unui automobil reprezint capacitatea acestuia de a se putea deplasa
pe drumuri neamenajate, n teren natural fr drum i de a putea trece peste obstacole de
anumite mrimi. Capacitatea de trecere este diferit n funcie de tipul, construcia i
destinaia automobilului. Aceast caracteristic nu este foarte important la automobilele
destinate circulaiei pe drumuri bune, cum sunt autoturismele de ora, autobuzele urbane i
interurbane dar ea se impune la autoturismele utilitare i variantele lor, la autocamioane i
chiar la autobuzele uoare, care trebuie s circule i pe drumuri neamenajate.
Fig. 1.2.
Cea mai mare capacitate de trecere o au automobilele de construcie special numite tot-
teren, care pot circula att pe drumuri neamenajate ct i n teren natural, fr drum, n
condiii de ploaie, zpad, polei, etc., ca i automobilele speciale (militare sau care lucreaz
n exploatri miniere, petroliere, n condiii de antier, etc.). Aceste automobile au o
capacitate de trecere mbuntit i datorit traciunii integrale, care distribuie momentul
motor la toate roile automobilului. Capacitatea de trecere se mbuntete prin folosirea
transmisiilor la care, la schimbarea treptelor de viteze, nu se ntrerupe fluxul de putere dintre
motor i roile motoare. Un automobil cu capacitatea de trecere mrit trebuie s permit
depirea obstacolelor fr riscul suspendrii roilor motoare i s asigure corelarea dintre
fora de traciune maxim la roi i aderena acestora cu calea de rulare. Caracteristicile
geometrice ale automobilului, care caracterizeaz capacitate de trecere (figura 1.11) sunt
urmtoarele: lumina sau garda la sol-c, raza longitudinala de trecere- l, raza transversala de
trecere- t, unghiurile de trecere din fa- 1 i din spate- 2.
Garda la sol c , reprezint distana, msurat pe vertical, dintre partea cea mai de jos a
asiului automobilului complet ncrcat i calea de rulare. Acest parametru reprezint
nlimea maxim a obstacolelor care pot fi trecute de automobilul ncrcat la sarcina
nominal, fr s le ating. Partea cea mai cobort a asiului se gsete, de obicei, sub
puntea din fa sau sub carterul punii din spate, n dreptul transmisiei principale. La unele
automobile, partea cea mai joas poate fi baia de ulei a motorului ( la unele autobuze la care
motorul este amplasat la mijlocul autobuzului, sub podea ). n literatura de specialitate sunt
date valorile acestui parametru pentru diferite categorii de
automobile.
Raza longitudinala de trecere ( p l) reprezint raza suprafeei cilindrice convenionale,
figura 1.11., tangent la roile din fa , roile din spate i la punctul cel mai cobort al
automobilului, situat intre puni. Raza longitudinala determin conturul proeminenei peste
care poate s treac automobilul, fr s o ating cu punctele cele mai joase. Cu ct aceasta
raz este mai mic cu att capacitatea de trecere a automobilului este mai mare.
Raza transversal de trecere (p t ),reprezint raza suprafeei cilindrice convenionale,
figura 1.11., tangent la punctul cel mai cobort, din fa sau din spate i la pneuri. Aceasta
raz arat mrimea obstacolelor, n plan transversal, peste care poate trece automobilul.
Valori mici ale razei transversale determin o capacitate mrit de trecere a automobilului.
Unghiurile de trecere o1 n fa i o2 n spate sunt determinate de tangentele la pneul din
fa, respectiv din spate i partea cea mai din fa, respectiv din spate a asiului sau caroseriei
( fig.1.11.) La circulaia pe un drum accidentat i mai ales in situaia n care automobilul urc
sau coboar unele denivelri ntlnite pe calea de rulare, este posibil s ating drumul cu
captul din fa sau cu cel din spate. Probabilitatea este cu att mai mare cu ct unghiurile de
trecere sunt mai mici i cu ct consolele sunt mai mari.
2 Capacitatea de ncarcre i greutatea automobilelor
Masele autovehiculului sunt :
a) masa proprie a autovehiculului M
0
creia i corespunde greutatea proprie G
0
.
Aceasta reprezint masa vehiculului carosat far ncrctur , gata de drum cu 90% din
carburant si conductorului auto (75 kg).
b) masa total maxim admisibil M
a
, creia i corespunde greutatea total
maxim admisibil G
a
. Aceasta reprezint masa proprie a autovehiculului la care se
adaug masa maxim a ncrcturii stabilit de constructor.
c) masa total maxim autorizat , creia i corespunde greutatea total maxim
autorizat . Aceasta reprezint masa total maxim a fiecarui tip de autovehicul autorizat
pentru circulaia pe drumurile publice conform legislaiei n vigoare. Nu poate depi masa
total tehnic admisibil prevzut de constructor .
d) Sarcina util maxim constructiv a autovehiculului M
u
, creia i corespunde
greutatea util G
u
a autovehicului. Aceasta reprezint masa maxim a ncrcaturii
prescris de constructor .
e) Sarcinile pe puntea din fa i pe
puntea din spate reprezint masele ce revin
fiecrei puni prin repartizarea masei totale
maxime admisibile . Acestora le corespund
greutile pe puntea din fa i pe puntea din
spate notate cu G
1
, respectiv G
2
(Fig. 3) .
Poziia centrului de mas pe directie
orizontal i vertical se poate determina n
funcie de ampatamentul autovehiculului prin
msurarea experimental prin cntrire a
sarcinilor corespunztoare fiecrei puni , mai nti cu autovehiculul situat pe un plan
orizontal i apoi pe un plan nclinat.
Fig. 1.3
CAPITOLUL II
REZISTENE LA DEPLASAREA AUTOMOBILELOR
II.1. Rezistena la rulare
Rezistenaa la rulare ( R
r
) este ofor cu aciune permanent la rularea roilor pe
cale, de sens opus sensului deplasrii autovehiculului.
Cauzele fizice ale acestei rezistene la naintare sunt: deformarea cu histerezis a
pneului, frecri superficiale ntre pneu i cale, frecrile din lagrele roii, deformarea cii,
percuia dintre elementele pneului i microneregularitile cii, efectul de ventuz produs
de profilele cu contur nchis pe banda de rulare etc.
Fig.2.1 Perderile de emergie prin fenomenul de histerezis la deformarea flancurilor
si benzii de rulare
Fig.2.2. Deformarea caii de rulare
Fig.2.3. Dezechilibrul dintre valorile din zona posterioara si ce anterioare ale petei de contact
in cazul rotii conduse
Fa de cauzele determinate, rezistena la rulare depinde de un numr mare de
factori de influen, printre caresemnificativi sunt: construcia pneului, viteza de
deplasare, presiunea aerului din pneu, forele i momentele ce acioneaz asupra roii.
n calculele de proiectare dinamic a autovehiculelor, rezistena la rulare este luat
n considerare prin coeficientul rezistenei la rulare f, care reprezint o for
specific la rulare definit prin relaia:
o cos
=
a
r
G
R
f , unde:
R
r
este rezistena la rulare ;
G
a
cos o - componenta greutii normal pe cale ;
Fig.2.4. Procesele de histerezis din cauciuc produse la depasire microneregularitatilor
drumului
II.2. Rezistena la urcarea pantelor
Rezistenta la urcarea pantei este, de fapt, component paralela cu panta a greutatii
autovehiculului, indreptata catre baza pantei. Ea este aplicata, ca si forta de greutate, in
central de greutate al autovehiculului. Pentru pante cu nclinri mari (o 35
o
) expresia
rezistenei la pant este dat de relaia :
R
p
= G
a
* p [ N ]
Fig.2.5
Inclinarea caii de rulare se apreciaza prin:
- unghiul cu orizontala,
- panta =h/l ;
unde: h este diferenta de nivel urcata de autovehicul atunci cand parcurge pe
cale o 10istant a carei proiectie pe orizontala este l.
Pnata poate fi exprimata procentual: =
Puterea necesara pentru invingerea rezistentei totale a drumului este data de diagramele din
figura de mai jos:
Fig.2.6
II.3. Rezistena la demarare
Regimurile tranzitorii ale micrii automobilului sunt caracterizate de sporiri ale
vitezei (demaraje) i reduceri ale vitezei (frnare). Rezistena la demarare ( R
d
) este o
for de rezisten ce se manifest n regimul de micare accelerat a autovehiculului.
Ca urmare a legturilor cinematice determinate n lanul cinematic al transmisiei
dintre motor i roile motoare, sporirea vitezei de translaie a autovehiculului se obine
prin sporirea vitezelor unghiulare de rotaie ale elementelor transmisiei i roilor. Masa
autovehiculului n micare de translaie capt o acceleraie liniar, iar piesele aflate n
micare de rotaie, acceleraii unghiulare.
Influena asupra ineriei n translaie a pieselor aflate n rotaie se face printr-un
coeficient o , numit coeficientul de influen a maselor aflate n micare de rotaie.
Rezistena la demarare este astfel dat de relaia:
unde : ma masa automobilului [ kg ] ;
o - coeficientul de influen al maselor aflate n micare de rotaie ;
dv/dt = a acceleraia micrii de translaie a autovehiculului [ m/s
2
].
dt
dv
m R
a d
* *o =
Pentru calculul rezistenei la demarare este necesar cunoaterea mrimii
coeficientului de influen a maselor aflate n micare de rotaie.
Deoarece rezistena la rulare ct i rezistena la pant sunt determinate de starea i
caracteristicile cii de rulare, se folosete gruparea celor dou fore ntr-o for de
rezisten total a cii ( R ), dat de relaia : R = Rr + Rp = Ga ( f cos o + sin o ) = Ga
* [ N ] unde : - coef. rezistenei totale a cii pentru nclinarea drumului de 35
0
II.4. Rezistena aerodinamic
Curgerea aerului peste caroseria autovehiculului este guvernata de relatia dintre viteza si
presiune descrisa de legea lui Bernoulli pentru un fluid ideal ( lipsit de vascozitate,
incompresibil ), neglijand fortele masice:
Ecuatia lui Bernolli arata ca in vecinatatea caroseriei suma presiunii statice si dinamice este
constanta.
Vizualizarea liniilor de curent in tunelul aerodinamic:
Fig.2.7
a) La distanta fata de caroserie:
- presiunea statica este presiunea atosferica ,
- presiunea dinamica este produsa de viteza relative, care este constanta pentru toate
liniile de curent.
Rezulta ca presiunea totala este aceeasi pentru toate liniile de curent.
b) In apropierea caroseriei:
- liniile de curent se despart, unele trecand pe deasupra, altele trecand pe sub
autovehicul, iar un ail loveste frontal;
- faptul ca liniile de current se ridica in punctual A, trecand peste autovehicul arata ca
presiunea static este mai mare decat cea atmosferica din liniile de current nedeformate
de la dreapta. Daca presiunea static este mai mare decat cea atmosferica, viteza s-a
redus, conform legii lui Bernoulli.
- dupa depasirea partii frontale a capotei, in punctul B, liniile de current isi schimba din
nou directia, curbandu-se in jos pentru a urmari profilul capotei; deci presiunea statia
scade si, prin cinsecinta, viteza creste.
Rezistenta aerului exista si este produsa de :
- frecarea aerului pe suprafata caroseriei;
- modul in care frecarea aerului de suprafata caroseriei modifica curgerea aerului in
partea din spate a caroseriei.
Utilizarea caracteristicii puterilor la studiul micrii autovehiculelor
Ecuaia bilanului puterilor la roile motoare ale autovehiculului este:
Pr = Prul + Pp + Pa + Pd, unde Prul este puterea necesar nvingerii rezistenei la rulare,
Pp puterea necesar nvingerii rezistenei la urcarea pantei.
Pa - puterea necesar nvingerii rezistenei aerului,
Pd - puterea necesar nvingerii rezistenei la accelerare.
La deplasarea cu vitez constant, mai mic dect viteza maxim posibil a fi
dezvoltat n treapta respectiv, nu este utilizat ntreaga putere de care dispune
motorul, el funcionnd la o sarcin parial. Diferena de la punctul d la punctul e
reprezint rezerva de putere de care dispune motorul i care poate fi utilizat fie
pentru accelerarea autovehiculului fie pentru nvingerea amplificrii unei alte rezistene
(de exemplu pentru urcarea unei pante mai accentuate). n aceast situaie, este
comandat trecerea la funcionarea motorului la o sarcin mai mare, pn la sarcina
total, dac este necesar.
Punctul f, de intersectare a curbei puterii la roat cu curba rezistenelor la
naintare reprezint regimul la care puterea motorului este utilizat n ntregime pentru
nvingerea rezistenelor la rulare, la pant i a aerului, nemairmnnd disponibil
putere pentru accelerare. Deci, n punctul f, , viteza acestui punct fiind viteza
maxim ce poate fi dezvoltat pe drumul respectiv n treapta de viteze utilizat. n acest
caz, bilanul de puteri devine:
Pr = Pe nt = Prul + Pp + Pa
Pentru studiul performanelor maxime de traciune, trebuie analizat variaia
forei de traciune n funcie de vitez, atunci cnd motorul funcioneaz la sarcin
total, iar schimbtorul de viteze este cuplat succesiv n toate treptele caracteristica
de traciune. Deoarece, pentru o anumit treapt a schimbtorului de
viteze ( isk), Ft este direct proporional cu Me, alura curbei sale de variaie este similar
au aceea a momentului motor.
Pentru toate treptele schimbtorului de viteze, se obine o familie de curbe:
Caracteristica exterioar a motoarelor cu combustie
intern
Parametrii de funcionare ai motorului cu ardere intern cu piston sunt exprimai cu
ajutorul caracteristicii de turaie exterioar .
Prin caracteristica de turaie exterioar sau pe scurt caracteristica exterioar se
inelege funcia de dependen a momentului motor i a puterii motorului fa de viteza
unghiular de rotaie a arborelui cotit la admisiune total , reglajele motorului i temperature
de funcionare fiind cele optime.
Pentru motoarele a cror caracteristic nu este determinat experimental cum este
cazul cnd se proiecteaz un motor nou , se folosete o exprimare analitic a caracteristici
exterioare de forma P=P(n) , M=M(n).
Pentru ridicarea caracteristicii exterioare se folosesc relaiile :
n
min
=0.175 x n
P
[rot/min]
n
max
=1,08 x n
P
[rot/min]
M
P
=
P
n
P
max
9554
[Nm]
M=
( ) ( )
M P
M P
n n
n n M M
M
2
max
max
[Nm]
P=
9554
M n
[KW]
, n - variaia turaiei
n
min
- turaia minim
n
max
- turaia minim
M
P
- momentul la puterea maxim
P
max
- puterea maxim
M - variaia momentului
P - variaia puterii
Cu ajutorul acestor formule se obine variaia momentului si a puterii n funcie de
turaia motorului.
Tab. 1.1 Variaia puterii i a momentului n funcie de turaia
motorului
n [rot/min] P [KW] M [Nm]
1.0500 12.1325 110.3945
1.3694 16.4869 115.0247
1.6888 21.0572 119.1249
2.0082 25.7903 122.6951
2.3276 30.6329 125.7352
2.6471 35.5320 128.2453
2.9665 40.4343 130.2253
3.2859 45.2868 131.6753
3.6053 50.0361 132.5953
3.9247 54.6293 132.9853
4.2441 59.0130 132.8452
4.5635 63.1343 132.1751
4.8829 66.9398 130.9750
5.2024 70.3765 129.2448
5.5218 73.3912 126.9846
5.8412 75.9306 124.1944
6.1606 77.9418 120.8741
6.4800 79.3714 117.0238
1.0500 12.1325 110.3945
1.3694 16.4869 115.0247
1.6888 21.0572 119.1249
Cap III.
Caracteristica de traciune
Caracteristica de traciune al autovehiculului reprezint echilibrul tuturor forelor care
acioneaz asupra acestuia la micarea rectilinie, pe un drum oarecare avnd admisiunea plin
a motorului, respectiv fora total la roat F
R
obinut prin nsumarea forelor tangeniale de
la toate roile motoare echilibreaz suma tuturor rezistenelor la naintare, adic rezistena la
rulare R
r
, rezistena la urcare a pantei R
p
, rezistena aerului R
a
, inclusiv rezistena la demarare
R
d
.
d a p r R
R R R R F + + + =
Variaia parabolic a forei la roat este determinat de caracterul variaiei
momentului motorului n funcie de turaie.
Caracteristica de traciune numit i fora la roat se determin n condiiile
funcionrii motorului la sarcin total cu reglaje la valorile optime. Aceasta reprezint
graficul de variaie al forei tangeniale la roat dezvoltat de motor n funcie de viteza de
deplasare pentru fiecare treapt de vitez selectat F
R
=f(v
a
).
r
tr cv
R
r
i i M
F
q
=
0
[N],
r
r
raza de rulare;
tr
randamentul total al transmisiei;
i
0
raportul de transmitere al transmisiei principale;
i
cv
raportul de transmitere al treptelor de vitez;
Viteza teoretic se calculeaz cu relaia:
cv
r
a
i i
n r
v
=
0
377 . 0
f Ga R
r
=
13 2
1
2
a
x a
v
A C R =
f rezistena la rulare;
f = (0.018...0.024) se adopt f = 0.018;
densitatea aerului;
= 1.226 [kg/m
3
];
C
x
coeficient de rezisten al aerului;
C
x
= 0.4;
H B C A
F
=
C
F
coeficient de corecie;
C
F
= 0.98;
B ecartamentul autovehiculului;
H nlimea autovehiculului;
Tab.2.1. Bilanul de traciune
V [km/h] Fa [N] Fa+Fr [N]
10 2.5141 0.4003
20 10.0564 0.4079
30 22.6270 0.4204
40 40.2258 0.4380
50 62.8528 0.4607
60 90.5080 0.4883
70 123.1915 0.5210
80 160.9032 0.5587
90 203.6431 0.6014
100 251.4112 0.6492
110 304.2076 0.7020
120 362.0322 0.7598
130 424.8850 0.8227
140 492.7660 0.8906
150 565.6753 0.9635
160 643.6128 1.0414
170 726.5785 1.1244
180 814.5724 1.2124
n M
Treptele de vitez
I II III IV V
v R
r
v R
r
v R
r
v R
r
v R
r
1.0500 110.3945 6.3793 5.2303 11.6695 2.8592 17.3352 1.9248 23.6857 1.4087 29.1739 1.1437
1.3694 115.0247 8.3200 5.4497 15.2194 2.9792 22.6086 2.0055 30.8909 1.4678 38.0486 1.1917
1.6888 119.1249 10.2606 5.6439 18.7693 3.0853 27.8820 2.0770 38.0962 1.5201 46.9233 1.2341
2.0082 122.6951 12.2012 5.8131 22.3192 3.1778 33.1554 2.1392 45.3014 1.5657 55.7981 1.2711
2.3276 125.7352 14.1418 5.9571 25.8691 3.2566 38.4288 2.1922 52.5066 1.6044 64.6728 1.3026
2.6471 128.2453 16.0824 6.0760 29.4190 3.3216 43.7022 2.2360 59.7119 1.6365 73.5475 1.3286
2.9665 130.2253 18.0230 6.1698 32.9689 3.3729 48.9755 2.2705 66.9171 1.6617 82.4223 1.3491
3.2859 131.6753 19.9636 6.2385 36.5188 3.4104 54.2489 2.2958 74.1223 1.6802 91.2970 1.3642
3.6053 132.5953 21.9042 6.2821 40.0687 3.4342 59.5223 2.3118 81.3275 1.6920 100.1717 1.3737
3.9247 132.9853 23.8448 6.3006 43.6186 3.4443 64.7957 2.3186 88.5328 1.6970 109.0465 1.3777
4.2441 132.8452 25.7854 6.2940 47.1685 3.4407 70.0691 2.3162 95.7380 1.6952 117.9212 1.3763
4.5635 132.1751 27.7260 6.2622 50.7184 3.4234 75.3425 2.3045 102.9432 1.6866 126.7959 1.3693
4.8829 130.9750 29.6667 6.2054 54.2683 3.3923 80.6159 2.2836 110.1485 1.6713 135.6707 1.3569
5.2024 129.2448 31.6073 6.1234 57.8182 3.3475 85.8893 2.2534 117.3537 1.6492 144.5454 1.3390
5.5218 126.9846 33.5479 6.0163 61.3681 3.2889 91.1627 2.2140 124.5589 1.6204 153.4201 1.3156
5.8412 124.1944 35.4885 5.8841 64.9179 3.2166 96.4361 2.1654 131.7642 1.5848 162.2949 1.2867
6.1606 120.8741 37.4291 5.7268 68.4678 3.1307 101.7095 2.1075 138.9694 1.5424 171.1696 1.2523
6.4800 117.0238 39.3697 5.5444 72.0177 3.0309 106.9829 2.0403 146.1746 1.4933 180.0443 1.2124
Cap. IV
Caracteristica dinamic a autovehiculelor
Fora de traciune disponibil, excedentar F
e
= F
R
-R
a
, care se utilizeaz la nvingerea
rezistenelor drumului i rezistenei la demarare, caracterizeaz dinamicitatea autovehiculului,
dar nu poate fi folosit ca indice de comparaie pentru autovehiculele de greuti diferite
deoarece la valori egale ale forei excedentare F
e
, calitile dinamice ale unui autovehicul cu
greutate total mai mic sunt superioare celor ale unui autovehicul cu greutate total mai
mare. De aceea, aprecierea calitilor dinamice ale autovehiculelor se face cu ajutorul
factorului dinamic D, care este o for excedentar specific, deci un parametru adimensional
dat de raportul dintre fora de traciune excedentar F
e
i greutatea total a autovehiculului G
a
respectiv:
a
R
a
a R
a
e
G
v A k F
G
R F
G
F
D
2
=
= =
Curbele de variaie ale factorului dinamic n funcie de viteza autovehiculului, pentru
toate treptele cutiei de vitez, reprezint caracteristica dinamic a autovehiculului prezentat
n fig. 3.1.
n
Treptele de vitez
I II III IV V
v
D
v
D
v
D
v
D
v
D
1.0500 6.3793 0.2366 11.6695 0.1292 17.3352 0.0868 23.6857 0.0631 29.1739 0.0511
1.3694 8.3200 0.2465 15.2194 0.1345 22.6086 0.0902 30.8909 0.0653 38.0486 0.0528
1.6888 10.2606 0.2553 18.7693 0.1392 27.8820 0.0931 38.0962 0.0671 46.9233 0.0542
2.0082 12.2012 0.2629 22.3192 0.1432 33.1554 0.0955 45.3014 0.0685 55.7981 0.0552
2.3276 14.1418 0.2693 25.8691 0.1466 38.4288 0.0975 52.5066 0.0695 64.6728 0.0558
2.6471 16.0824 0.2746 29.4190 0.1493 43.7022 0.0990 59.7119 0.0700 73.5475 0.0561
2.9665 18.0230 0.2788 32.9689 0.1514 48.9755 0.1000 66.9171 0.0701 82.4223 0.0560
3.2859 19.9636 0.2818 36.5188 0.1528 54.2489 0.1005 74.1223 0.0698 91.2970 0.0555
3.6053 21.9042 0.2837 40.0687 0.1536 59.5223 0.1006 81.3275 0.0690 100.1717 0.0546
3.9247 23.8448 0.2844 43.6186 0.1537 64.7957 0.1001 88.5328 0.0679 109.0465 0.0534
4.2441 25.7854 0.2840 47.1685 0.1532 70.0691 0.0992 95.7380 0.0663 117.9212 0.0518
4.5635 27.7260 0.2825 50.7184 0.1520 75.3425 0.0978 102.9432 0.0643 126.7959 0.0499
4.8829 29.6667 0.2798 54.2683 0.1501 80.6159 0.0959 110.1485 0.0618 135.6707 0.0476
5.2024 31.6073 0.2759 57.8182 0.1477 85.8893 0.0936 117.3537 0.0590 144.5454 0.0449
5.5218 33.5479 0.2710 61.3681 0.1445 91.1627 0.0907 124.5589 0.0557 153.4201 0.0419
5.8412 35.4885 0.2648 64.9179 0.1408 96.4361 0.0874 131.7642 0.0520 162.2949 0.0385
6.1606 37.4291 0.2575 68.4678 0.1363 101.7095 0.0836 138.9694 0.0478 171.1696 0.0347
6.4800 39.3697 0.2491 72.0177 0.1312 106.9829 0.0793 146.1746 0.0433 180.0443 0.0306
Valoarea maxim a forei la roat este limitat de alunecarea roilor pe suprafaa
drumului i atunci limita superioar a acestei fore este:
m R
Z F =
max
- Z
m
reaciunea normal la puntea motoare.
a m
G
L
b
Z =
b este distana de la centrul de greutate la puntea spate;
coeficient de aderen i ia valorile 0.2, 0.3, 0.4, 0.5, 0.6;
Introducnd F
Rmax
n expresia factorului dinamic se obine factorul dinamic sau
factorul de propulsie D
:
a
m
G
v A k Z
D
2
=
Parametrii principali ai calitilor dinamice de traciune sunt: raportul dintre puterea
maxim i greutatea autovehiculului, factorul dinamic maxim la prima treapt de vitez i
priza direct, precum i viteza maxim pe drum orizontal de calitate bun cu ncrctur
nominal.
n Treptele de vitez
I II III IV V
v
D
v
D
v
D
v
D
v
D
1.0500 6.3793 0.2399 11.6695 0.1999 17.3352 0.1599 23.6857 0.1199 29.1739 0.0799
1.3694 8.3200 0.2395 15.2194 0.1995 22.6086 0.1595 30.8909 0.1195 38.0486 0.0795
1.6888 10.2606 0.2390 18.7693 0.1990 27.8820 0.1590 38.0962 0.1190 46.9233 0.0790
2.0082 12.2012 0.2382 22.3192 0.1982 33.1554 0.1582 45.3014 0.1182 55.7981 0.0782
2.3276 14.1418 0.2372 25.8691 0.1972 38.4288 0.1572 52.5066 0.1172 64.6728 0.0772
2.6471 16.0824 0.2359 29.4190 0.1959 43.7022 0.1559 59.7119 0.1159 73.5475 0.0759
2.9665 18.0230 0.2344 32.9689 0.1944 48.9755 0.1544 66.9171 0.1144 82.4223 0.0744
3.2859 19.9636 0.2327 36.5188 0.1927 54.2489 0.1527 74.1223 0.1127 91.2970 0.0727
3.6053 21.9042 0.2308 40.0687 0.1908 59.5223 0.1508 81.3275 0.1108 100.1717 0.0708
3.9247 23.8448 0.2286 43.6186 0.1886 64.7957 0.1486 88.5328 0.1086 109.0465 0.0686
4.2441 25.7854 0.2262 47.1685 0.1862 70.0691 0.1462 95.7380 0.1062 117.9212 0.0662
4.5635 27.7260 0.2236 50.7184 0.1836 75.3425 0.1436 102.9432 0.1036 126.7959 0.0636
4.8829 29.6667 0.2208 54.2683 0.1808 80.6159 0.1408 110.1485 0.1008 135.6707 0.0608
5.2024 31.6073 0.2177 57.8182 0.1777 85.8893 0.1377 117.3537 0.0977 144.5454 0.0577
5.5218 33.5479 0.2144 61.3681 0.1744 91.1627 0.1344 124.5589 0.0944 153.4201 0.0544
5.8412 35.4885 0.2109 64.9179 0.1709 96.4361 0.1309 131.7642 0.0909 162.2949 0.0509
6.1606 37.4291 0.2071 68.4678 0.1671 101.7095 0.1271 138.9694 0.0871 171.1696 0.0471
6.4800 39.3697 0.2031 72.0177 0.1631 106.9829 0.1231 146.1746 0.0831 180.0443 0.0431
mbuntirea performanelor autovehiculelor se obine prin creterea factorului
dinamic, care se poate realiza prin mrirea cuplului motorului, prin mrirea raportului de
transmitere din transmisia principal, prin reducerea greutii proprii i prin construirea unor
caroserii mai aerodinamice.
Cap. V
Determinarea acceleraiilor autovehiculelor
Acceleraia autovehiculului se caracterizeaz, n general, calitile lui dinamice, n
condiii egale, cu ct acceleraia este mai mare cu att crete viteza medie de exploatare.
Valoarea acceleraiei autovehiculului se poate determina cu ajutorul caracteristicii dinamice
utiliznd relaia:
dt
dv
g
D + =
o
,
de unde:
( )
o
g
D
dt
dv
a = =
Rezult c acceleraia autovehiculului a este direct proporional cu diferena (D )
deci este cu att mai mare cu ct factorul dinamic este mai mare i invers proporional cu
coeficientul maselor de rotaie .
rezistena total a drumului;
o o sin cos + = f
coeficientul de influen a maselor n micare de rotaie asupra maselor de
translatare a autovehiculului.
o + + =1
g
G
m
r m
J
r m
i J
a
a
r a
n
R
r a
tr tr m
=
=
+
=
2
1
2
2
J
m
moment de inerie al mecanismului motor;
J
m
= 0.02...0.07 [kg m
2
];
J
R
moment de inerie al unei roi a autovehiculului;
J
R
= 0.2...0.6 [kg m
2
];
n numrul de roi a autovehiculului;
Reprezentarea grafic a acceleraiei i a inversei acceleraiei sunt
prezentate n figurile 4.1. i 4.2.
n
Treptele de vitez
I II III IV V
v
a
v
a
v
a
v
a
v
a
1.0500 6.3793 2.0235 11.6695 1.0664 17.3352 0.6648 23.6857 0.4375 29.1739 0.3216
1.3694 8.3200 2.1151 15.2194 1.1174 22.6086 0.6978 30.8909 0.4591 38.0486 0.3384
1.6888 10.2606 2.1960 18.7693 1.1622 27.8820 0.7261 38.0962 0.4766 46.9233 0.3516
2.0082 12.2012 2.2664 22.3192 1.2007 33.1554 0.7498 45.3014 0.4900 55.7981 0.3612
2.3276 14.1418 2.3262 25.8691 1.2330 38.4288 0.7689 52.5066 0.4992 64.6728 0.3672
2.6471 16.0824 2.3754 29.4190 1.2591 43.7022 0.7833 59.7119 0.5044 73.5475 0.3697
2.9665 18.0230 2.4140 32.9689 1.2789 48.9755 0.7930 66.9171 0.5054 82.4223 0.3687
3.2859 19.9636 2.4420 36.5188 1.2925 54.2489 0.7981 74.1223 0.5023 91.2970 0.3640
3.6053 21.9042 2.4594 40.0687 1.2999 59.5223 0.7985 81.3275 0.4951 100.1717 0.3558
3.9247 23.8448 2.4662 43.6186 1.3010 64.7957 0.7942 88.5328 0.4838 109.0465 0.3441
4.2441 25.7854 2.4624 47.1685 1.2959 70.0691 0.7853 95.7380 0.4683 117.9212 0.3288
4.5635 27.7260 2.4480 50.7184 1.2846 75.3425 0.7718 102.9432 0.4488 126.7959 0.3099
4.8829 29.6667 2.4230 54.2683 1.2671 80.6159 0.7536 110.1485 0.4251 135.6707 0.2875
5.2024 31.6073 2.3874 57.8182 1.2433 85.8893 0.7307 117.3537 0.3973 144.5454 0.2615
5.5218 33.5479 2.3413 61.3681 1.2133 91.1627 0.7032 124.5589 0.3654 153.4201 0.2319
5.8412 35.4885 2.2845 64.9179 1.1770 96.4361 0.6711 131.7642 0.3294 162.2949 0.1988
6.1606 37.4291 2.2171 68.4678 1.1346 101.7095 0.6342 138.9694 0.2893 171.1696 0.1621
6.4800 39.3697 2.1391 72.0177 1.0859 106.9829 0.5928 146.1746 0.2451 180.0443 0.1219
fig 4.1 Variatia acceleratiei
n
Treptele de vitez
I II III IV V
v
a
1
v
a
1
v
a
1
v
a
1
v
a
1
1.0500 6.3793 0.4942 11.6695 0.9377 17.3352 1.5043 23.6857 2.2855 29.1739 3.1091
1.3694 8.3200 0.4728 15.2194 0.8949 22.6086 1.4331 30.8909 2.1780 38.0486 2.9553
1.6888 10.2606 0.4554 18.7693 0.8604 27.8820 1.3772 38.0962 2.0981 46.9233 2.8445
2.0082 12.2012 0.4412 22.3192 0.8328 33.1554 1.3336 45.3014 2.0409 55.7981 2.7688
2.3276 14.1418 0.4299 25.8691 0.8110 38.4288 1.3006 52.5066 2.0030 64.6728 2.7231
2.6471 16.0824 0.4210 29.4190 0.7942 43.7022 1.2767 59.7119 1.9826 73.5475 2.7048
2.9665 18.0230 0.4143 32.9689 0.7819 48.9755 1.2611 66.9171 1.9786 82.4223 2.7126
3.2859 19.9636 0.4095 36.5188 0.7737 54.2489 1.2530 74.1223 1.9908 91.2970 2.7471
3.6053 21.9042 0.4066 40.0687 0.7693 59.5223 1.2524 81.3275 2.0198 100.1717 2.8103
3.9247 23.8448 0.4055 43.6186 0.7686 64.7957 1.2591 88.5328 2.0671 109.0465 2.9062
4.2441 25.7854 0.4061 47.1685 0.7716 70.0691 1.2733 95.7380 2.1352 117.9212 3.0415
4.5635 27.7260 0.4085 50.7184 0.7784 75.3425 1.2957 102.9432 2.2282 126.7959 3.2267
4.8829 29.6667 0.4127 54.2683 0.7892 80.6159 1.3270 110.1485 2.3523 135.6707 3.4785
5.2024 31.6073 0.4189 57.8182 0.8043 85.8893 1.3685 117.3537 2.5167 144.5454 3.8242
5.5218 33.5479 0.4271 61.3681 0.8242 91.1627 1.4220 124.5589 2.7364 153.4201 4.3115
5.8412 35.4885 0.4377 64.9179 0.8496 96.4361 1.4902 131.7642 3.0355 162.2949 5.0296
6.1606 37.4291 0.4510 68.4678 0.8814 101.7095 1.5767 138.9694 3.4565 171.1696 6.1671
6.4800 39.3697 0.4675 72.0177 0.9209 106.9829 1.6870 146.1746 4.0805 180.0443 8.2024
fig.4.2 Variatia inversei acceleratiei
Cap. VI
Stabilitatea autovehiculului
Forele ce acioneaz asupra autovehiculelor pot fi grupate n dou categorii mari.
n prima categorie se includ forele care se pot modifica nemijlocit prin comenzile
executate de ctre conductor.
n a doua categorie se includ forele care se manifest ntmpltor, deci care nu pot fi
modificate n mod nemijlocit de ctre conductor.
Dup modul cum se produc micrile n raport cu axele principale ale autovehiculului
se deosebesc stabilitatea longitudinal i stabilitatea transversal, fiecare dintre ele putndu-
se referi la atingerea limitei de aderen sau la rsturnare.
5.1. Stabilitatea longitudinal a autovehiculelor cu roi
Stabilitatea longitudinal a autovehiculelor este capacitatea autovehiculului de a se
opune alunecrii sau patinrii longitudinale precum i rsturnrii n raport cu o ax
transversal.
5.1.1. Stabilitatea longitudinal la rsturnare a autovehiculelor
Pentru un regim de micare dat exist un unghi limit de rsturnare
r
, la care ncepe
s se produc rsturnarea i este dat de relaia:
g
r
h
b
arctg = o
52,11 =
r
o
5.1.2. Stabilitatea longitudinal la alunecare a autovehiculelor
g
a
h L
b
arctg
+
=
o
0,7 0,35 0,15
a
12.95 7,2 3.28
Viteza de rsturnare datorat rezistenei aerului este dat de relaia:
A b C
A k
h
G b
V
z a
a
r
+
=
00471 . 0
13
[km/h]
v
r
=466,29 [km/h]
C
z
coeficient de portan;
C
z
= 0.3...0.5;
C
z
= 0,3;
5.2. Stabilitatea transversal a autovehiculelor
Stabilitatea transversal este capacitatea autovehiculului de a se opune deraprii sau
rsturnrii transversale n raport cu dreapta care unete centrele petelor de contact ale roilor
de pe aceeai parte a autovehiculului
Pierderea stabilitii transversale este provocat de aciunea forelor transversale.
Acestea sunt determinate de deplasarea n curb, nclinarea transversal a cii de rulare,
vntul lateral i neregularitile cii de rulare. Efectele cele mai mari sunt date de forele
ineriei care iau natere la mersul n curb.
- viteza limit de rsturnare pe cale de rulare cu nclinare transversal sau curb la
vitez constant
v
g
g
r
R
tg
h
E
tg
h
E
v
=
|
|
5 , 0
1
5 , 0
3 , 11
[Km/h]
- pentru cale orizontal
v
g
r
R
h Z
E
v
= 3 , 11 [Km/h]
- viteza limit de derapare
v
y
y
d
R
tg
tg
v
+
=
|
|
1
3 , 11 [Km/h]
R
v
= 0
0
= 4
0
= 6
0
v
d
= 0.7 = 0.35 =0.15 v
d
v
d
v
r
v
r
v
r
10 32.3898 29.8970 21.1404 13.8396 34.7530 35.9881
20 45.8060 42.2807 29.8970 19.5722 49.1482 50.8949
30 56.1007 51.7831 36.6162 23.9709 60.1940 62.3332
40 64.7795 59.7940 42.2807 27.6792 69.5061 71.9762
50 72.4257 66.8517 47.2713 30.9463 77.7102 80.4718
60 79.3384 73.2324 51.7831 33.9000 85.1272 88.1525
70 85.6952 79.1000 55.9321 36.6162 91.9479 95.2156
80 91.6121 84.5615 59.7940 39.1443 98.2965 101.7897
90 97.1693 89.6910 63.4211 41.5189 104.2591 107.9643
100 102.4254 94.5426 66.8517 43.7647 109.8988 113.8044
110 107.4247 99.1571 70.1147 45.9008 115.2628 119.3590
120 112.2014 103.5662 73.2324 47.9418 120.3881 124.6665
130 116.7829 107.7951 76.2227 49.8994 125.3039 129.7570
140 121.1914 111.8643 79.1000 51.7831 130.0340 134.6552
150 125.4450 115.7905 81.8763 53.6006 134.5980 139.3813
160 129.5590 119.5880 84.5615 55.3585 139.0122 143.9524
170 133.5464 123.2684 87.1640 57.0622 143.2905 148.3828
180 137.4181 126.8422 89.6910 58.7165 147.4447 152.6846
190 141.1837 130.3180 92.1487 60.3255 151.4850 156.8685
200 144.8514 133.7034 94.5426 61.8926 155.4204 160.9437
210 148.4285 137.0052 96.8773 63.4211 159.2585 164.9182
220 151.9214 140.2293 99.1571 64.9136 163.0062 168.7992
230 155.3358 143.3809 101.3856 66.3725 166.6698 172.5929
240 158.6767 146.4647 103.5662 67.8000 170.2545 176.3050
250 161.9488 149.4849 105.7018 69.1981 173.7652 179.9405
260 165.1560 152.4453 107.7951 70.5685 177.2065 183.5040
270 168.3021 155.3493 109.8486 71.9128 180.5821 186.9997
280 171.3905 158.2000 111.8643 73.2324 183.8958 190.4312
290 174.4242 161.0002 113.8443 74.5286 187.1509 193.8019
300 177.4060 163.7526 115.7905 75.8027 190.3503 197.1150
- condiia de stabilitate transversal la rsturnare la deplasarea rectilinie cu vitez
constant:
E
h
arctg
g
=
2
|
=40,81
- condiia de stabilitate transversal la derapare la deplasarea rectilinie cu vitez
constant:
y
arctg
|
1
=
=34.99
E-ecartamentul autovehiculului
-unghiul de nclinare transversal a drumului
h
g
-poziia centrului de greutate
y
-coeficient de aderan
5.3Stabilitatea micrii rectilinii la devierea pneurilor
1
1
2
2
3 , 11
K
G
K
G
L
v
cr
= [Km/h]
v
cr
=38,94
K
1
,K
2
-coeficieni de rezisten la devierea pneurilor
Cap. VII
Precizarea vibratilor i zgomotelor din autovehicul
Deplasarea autovehiculelor pe drum este nsoit de apariia permanent a oscilaiilor
i ocurilor. Aceste oscilaii se manifest la nivelul maselor suspendate i nesuspendate ale
autovehiculelor influennd considerabil confortabilitatea pasagerilor, integritatea mrfurilor
transportate, durabilitatea elementelor componente ale caroseriei, suspensiei, transmisiei i
motorului.
ocurile i oscilaiile la care snt supuse autovehiculele snt determinate de cauze
exterioare i interioare. Trebuie remarcat c aceste cauze se manifest de cele mai multe ori
simultan. ocurile i oscilaiile existente la autovehicule au o influen nociv asupra
organismului uman, provocnd oboseli mari i senzaii fiziologice neplcute persoanelor
aflate n automobile. n situaiile n care se circul cu viteze ridicate pe drumuri de calitate
proast, dac nu se iau msuri speciale de protecie, sufer mult integritatea mrfurilor
transportate. In afar de aceasta din cauza ocurilor i oscilatiilor n organele componente ale
autovehiculelor (suspensie, transmisie, motor) apar sarcini dinamice mari. Chiar dac nu n
toate situaiile se ajunge la depirea limitei de rupere a pieselor, din cauza ocurilor i
oscilaiilor piesele componente ale automobilelor sunt supuse la solicitri variabile care au un
caracter, de cele mai multe ori, aleator i care reduc mult rezistena la oboseal a acestora.
'
Tot ca urmare a existenei ocurilor i oscilaiilor la autovehicule se ajunge la
reducerea eficienei transportului, cu astfel de mijloace, ca urmare a micorrii considerabile
a vitezei de deplasare. De asemenea, deplasarea autovehiculelor n astfel de condiii este
nsoit de creterea consumului de combustibil necesar nvingerii rczistenelor suplimentare
n elementele suspensiei i pierderilor suplimentare de energie n pneuri.
ocurile i oscilaiile la autovehicule depind de drumul pe care se deplaseaz i de
tipul autovehiculului. Ele se pot clasifica n :
a) ocuri i oscilaii provocate de denivelrile i neregularitile suprafeei drumului, de
rafalele de vnt, de frnarea autovehiculului etc. i
b) ocuri i oscilaii provocate de motor, transmisie, direcie i sistemul pneu-roat.
La autovehicule se studiaz:
a) oscilaiile libere sau proprii, care pot fi neamortizate i amortizate n scopul stabilirii
pulsaiilor proprii i a influenelor maselor nesuspendate, caracteristicilor elastice i de
amortizare ale suspensiei asupra confortabilitii i a rcgimului de deplasare ;
b) oscilaiile forate sau ntreinute care solicit permanent autovehiculele n timpul micrii.
Studiul acestor oscilaii este necesar pentru a stabili pulsaiile periculoase ale factorilor
perturbatori n scopul evitrii funcionrii ntregului sistem n zonele de rezonan. De
asemenea studiul unor astfel de oscilaii permite cercetarea influenei fiecrui factor
perturbator n parte asupra comportrii autovehiculelor i a subansamblelor componente n
timpul deplasrii.
La autovehicule, n timpul deplasrii, se pot ntlni urmtoarele tipuri de oscilaii sau vibraii:
1. Oscilaii ale asiului i caroseriei, considerate ca un rigid nedeformabil aezat pe
suspensia elastic format din arcuri, sau arcuri i pneuri. Aceste oscilaii au un caracter de
oscilaii libere, provocate de neregularitile suprafeei drumului, care acioneaz sub form
de ocuri. Uneori, n urma uzrii, suprafaa oselei ia forma unor valuri ; autovehiculele care
se deplaseaz pe ea la o anumit vitez intr n rezonan, ajungndu-se la oscilaii
periculoase. .
Ca rigid suspendat elastic, ansamblul asiu-caroserie are 6 grade de liber-tate :
translaii verticale, orizontale, longitudinale i transversale i rotaii n jnrul celor trei axe, pe
aceleai direcii. Pe de alt parte, roile din fa i din spate sprijinite pe pneuri pot s oscileze
mpreun cu punile corespun-ztoare, dac punile snt rigide, sau fiecare separat cnd
autovehiculul este echipat cu suspensie independent.
2. Vibraiile de torsiune i ncovoiere ale pieselor motorului i subansamblelor
transmisiei. Aceste vibraii se analizeaz pe modele dinamice echivalente cu un numr mai
mare sau mai mic de grade de libertate n funcie de numrul de cilindrii ai motorului, de
numrul de puni motoare i dac se ia n considerare sau nu cinematica i dinamica
mecanismelor difereniale de transmisie.
Aceste oscilaii snt cauzate att de neregularitile suprafeelor drumului ct i de o
serie de factori perturbatori interiori (momentul dc torsiune al motorului este variabil
periodic n timp, cuplarea ambreiajului, schimbarea treptelor de viteze, funcionarea
transmisiilor cardanice).
3. Vibraiile motorului, ambreiajului i cutiei de viteze n ansamblu fa de asiu. De
obicei aceste subansamble se monteaz elastic pe asiu i dac rezemarea este
necorespunztoare se ajunge la desfacerea prematur a mbinrilor, la fusuri i ruperi n asiu
i cartere. Prin luarea n considerare a acestor oscilaii modelele dinamice echivalente ale
autovehiculelor se complic i mai mult. ; :
4. Vibraii de fluturare, care se manifest prin oscilaiile roilor de direcie ntr-un plan
perpendicular pe direcia de mers. 0 form mai accentuat a fluturrii este fenomenul de
shimmy, cnd roile din fa se ridic succesiv de pe suprafaa drumuliii, i urmele lor au
form curbilinie.
Aceste fenomene se datoresc unei execuii necorespunztoare a articulaiilor i
jocurilor din acestea. Ele au ca urmare uzri rapide ale pneurilor, uzri ale articulaiilor,
mers instabil etc.
5. Vibraii ale scaunelor conductorului auto i pasagerilor care determin n bun
parte confortabilitatea autovehiculelor. Aceste vibraii snt cauzate de nsumarea efectelor
factorilor perturbatori exteriori i inferiori. Prin inlermediul scaunelor se transmit vibraiile
corpului omenesc i de aceea construciile acestora trebuie s fie astfel realizate nct s duc
la diminuarea efectelor duntoare.
La vehiculele remorcate se observ adesea oscilaii de pendulare, mani-festate prin
aceea c remorca nu urmeaz drumul autotractorului. Astfel de oscilaii snt favorizate de
jocurile n articulaia dispozitivului de remor-care, de poziia punctelor de legare la
autotractor i remorc a triunghiului de articulaie, de ecartamentul remoreii, de poziia
centrului ei de mas etc. Uneori, cnd acest sistem de remorcare este defectuos, oscilaiile de
pendulare devin periculoase.
Cercetarea teoretic a oscilaiilor autovehiculelor se face pe modele dinamice de complexitate
mai mic sau mai mare. Complexitatea modelelor dinamice fiind determinat n mare msur
de posibilitile de analiz i integrare a sistemelor de ecuaii difereniale care descriu starea
de micare. Odat cu perfecionarea performanelor calculatoarelor electronice s-au dezvoltat
metodele de integrare numeric aproximativ a sistemelor de ecuaii difereniale i ca urmare
a crescut i complexitatea modelelor dinamice.
Bibliografie
1. Marin Untaru Dinamica autovehiculelor pe roi.
Editura didactic i pedagogic Bucureti 1981
2. Buzdugan Gh. Msurarea vibrailor mecanice
Editura didactic i pedagogic Bucureti 1964
3. Stoicescu , A. Mecanica automobilului ,vol 1
Editura institutului politehnic Bucureti 1973
S-ar putea să vă placă și
- Proiect CCSTDocument28 paginiProiect CCSTTiberiu Niga100% (1)
- Etapa I Proiect CCSTDocument36 paginiEtapa I Proiect CCSTCosminAvăcăriței100% (1)
- 1.2 Realizarea Proiectului de Org GeneralaDocument11 pagini1.2 Realizarea Proiectului de Org GeneralaMircea UngureanuÎncă nu există evaluări
- Calcul Frana AutobetonieraDocument6 paginiCalcul Frana AutobetonieraPaula Draghiciu100% (1)
- Cutia de VitezeDocument16 paginiCutia de VitezeAnonymous KzlB9cieÎncă nu există evaluări
- Proiectarea Ambreiajului Unui MASDocument32 paginiProiectarea Ambreiajului Unui MASdanacatalinaÎncă nu există evaluări
- VD2p08 Steering AckermannDocument3 paginiVD2p08 Steering AckermannBogdan NeacsuÎncă nu există evaluări
- Proiectarea Unei Caroserii de Tip HatchbackDocument34 paginiProiectarea Unei Caroserii de Tip HatchbackAdrianGloÎncă nu există evaluări
- Proiect AmbreiajDocument21 paginiProiect AmbreiajDaniel NicolescuÎncă nu există evaluări
- Proiect Sistem FranareDocument49 paginiProiect Sistem FranareLilian GLÎncă nu există evaluări
- Itinerar Tehnologic Disc FranaDocument5 paginiItinerar Tehnologic Disc FranaRobert BiaÎncă nu există evaluări
- Calcul Sistem de Franare - Frane Disc - Stoica AndreiDocument10 paginiCalcul Sistem de Franare - Frane Disc - Stoica AndreiCorneliu Birtok-Baneasa100% (1)
- Suspensie CCA2Document30 paginiSuspensie CCA2Rosu Andrei100% (1)
- Proiect AmbreiajDocument30 paginiProiect AmbreiajRaduFlorinIonuţÎncă nu există evaluări
- Dinamica AutovehiculelorDocument42 paginiDinamica Autovehiculelorleg50% (2)
- Calcul Sistem de Franare - Frane DiscDocument9 paginiCalcul Sistem de Franare - Frane DiscCorneliu Birtok-Baneasa100% (1)
- Tema 16 Elemente de Calcul Mecanism de DirecțieDocument15 paginiTema 16 Elemente de Calcul Mecanism de DirecțieOvidiu JordasÎncă nu există evaluări
- PUNTIDocument23 paginiPUNTICristian ChiruÎncă nu există evaluări
- Proiect Caroserii Si Structuri PortanteDocument59 paginiProiect Caroserii Si Structuri PortanteBucerzan Marius100% (1)
- Calculul Dinamic: AutobetonieraDocument41 paginiCalculul Dinamic: AutobetonieraLucian CucuÎncă nu există evaluări
- CCA2Document27 paginiCCA2Okos ZsoltiÎncă nu există evaluări
- Proiect CCADocument18 paginiProiect CCAmmm mmmmasÎncă nu există evaluări
- Tisa PCCA 2 Suspensie Autofurgonaul CCA 2 Suspensie AutofurgonDocument7 paginiTisa PCCA 2 Suspensie Autofurgonaul CCA 2 Suspensie AutofurgonPaul TisaÎncă nu există evaluări
- Punte Rigida Cu Patru BrateDocument9 paginiPunte Rigida Cu Patru BrateStefan IonutÎncă nu există evaluări
- C SFDSDocument619 paginiC SFDSAlex ChiriacÎncă nu există evaluări
- Autobetoniera 165 KW, 4.2m3 2350rot, MinDocument28 paginiAutobetoniera 165 KW, 4.2m3 2350rot, MinJhonÎncă nu există evaluări
- Calcul Ambreiaj CCA MathcadDocument28 paginiCalcul Ambreiaj CCA MathcadJinar IoanÎncă nu există evaluări
- Proiect Final CCA2 Autobetoniera - FranaDocument31 paginiProiect Final CCA2 Autobetoniera - FranaCostin Anghel100% (2)
- Proiect Cca Nutu PDFDocument59 paginiProiect Cca Nutu PDFVoicu Claudiu100% (1)
- Laborator 1 Dinamica AutovehiculelorDocument11 paginiLaborator 1 Dinamica AutovehiculelorPaul PredaÎncă nu există evaluări
- Proiect CCA IIDocument61 paginiProiect CCA IICristina Florina100% (1)
- Cca2Document28 paginiCca2Demeter AlexandruÎncă nu există evaluări
- Bazele Ingineriei AutovehicululuiDocument7 paginiBazele Ingineriei AutovehicululuiIonut IchimÎncă nu există evaluări
- Calcul Ambreiaj CCA MathcadDocument31 paginiCalcul Ambreiaj CCA MathcadAndrei PodarÎncă nu există evaluări
- Punte Multi BratDocument15 paginiPunte Multi BratGaidargi RazvanÎncă nu există evaluări
- Greutatea Autovehiculului Şi Capacitatea de ÎncărcareDocument7 paginiGreutatea Autovehiculului Şi Capacitatea de ÎncărcareStefan VasiliuÎncă nu există evaluări
- Proiect Calculul Si Constructia Autovehiculelor Rutiere IDocument85 paginiProiect Calculul Si Constructia Autovehiculelor Rutiere Iiulianilie100% (1)
- Proiect Sistem de Franare Ccar2 Ar3 1Document70 paginiProiect Sistem de Franare Ccar2 Ar3 1Valentina Mihaela100% (1)
- Analiza Constructiva Si Functionala A Sistemului de FranareDocument36 paginiAnaliza Constructiva Si Functionala A Sistemului de FranareAndreea Mateescu100% (2)
- Memoriu Tehnic CCA2 Transmisie CardanicaDocument8 paginiMemoriu Tehnic CCA2 Transmisie CardanicaRadu JohnnyÎncă nu există evaluări
- 4 Factorul UmanDocument26 pagini4 Factorul UmanLucia ZotescuÎncă nu există evaluări
- Lucrarea 4 Factori Influenta Rezistenta Rulare 2019Document14 paginiLucrarea 4 Factori Influenta Rezistenta Rulare 2019Andrei padureacÎncă nu există evaluări
- Proiect Calculul Si Constructia Autovehiculelor RutiereDocument29 paginiProiect Calculul Si Constructia Autovehiculelor RutiereMarius RîpeanuÎncă nu există evaluări
- Proiect SuspensieDocument9 paginiProiect SuspensieAndrei PopÎncă nu există evaluări
- Sisteme de Franare, Directie Si SuspensieDocument21 paginiSisteme de Franare, Directie Si SuspensieAlin SoaitaÎncă nu există evaluări
- MC PhersonDocument3 paginiMC PhersonFlorin Ene100% (1)
- Ccar2 ProiectDocument25 paginiCcar2 ProiectRazvanAmironesei100% (1)
- Dinamica Autovehiculelor Rutiere Proiect FinalDocument92 paginiDinamica Autovehiculelor Rutiere Proiect Finalcostz_05Încă nu există evaluări
- Automobile - Proiect FurgonDocument87 paginiAutomobile - Proiect FurgonSandu CristianÎncă nu există evaluări
- Vibraţiile AutovehiculelorDocument8 paginiVibraţiile AutovehiculelorYonutz Ady100% (1)
- Proiectarea Sistemului de Franare PrezentareDocument25 paginiProiectarea Sistemului de Franare PrezentareTimciuc Iacob100% (1)
- Tambur de Frână (Proiect)Document6 paginiTambur de Frână (Proiect)Gabriel Podariu0% (1)
- Caracteristicile MotoarelorDocument15 paginiCaracteristicile MotoarelorAltium ITP100% (1)
- Suport Proiect PMTDocument28 paginiSuport Proiect PMTRobert GorieÎncă nu există evaluări
- Curs MT 5 - Exploatarea Mijloacelor de Transport RutierDocument98 paginiCurs MT 5 - Exploatarea Mijloacelor de Transport RutierDima ChiroșcaÎncă nu există evaluări
- Anexa 1Document26 paginiAnexa 1Cosmin DiaconuÎncă nu există evaluări
- Suport Proiect PMTDocument27 paginiSuport Proiect PMTRobert GorieÎncă nu există evaluări
- PROIECT LA Caroserii Si Sisteme de SigutDocument29 paginiPROIECT LA Caroserii Si Sisteme de SigutIulian PuscasuÎncă nu există evaluări
- Proiect DarDocument75 paginiProiect DarpuybogdanÎncă nu există evaluări
- MT 5 - Parametrii Mijloacelor de Transport Rutier. Exploatarea AutomobilelorDocument98 paginiMT 5 - Parametrii Mijloacelor de Transport Rutier. Exploatarea AutomobilelorFunny GuyÎncă nu există evaluări
- Comunicare in Inginerie Si Management - PDF PDFDocument200 paginiComunicare in Inginerie Si Management - PDF PDFradoo9Încă nu există evaluări
- Picos Volumu I Proiectarea Tehnologiilor de Prelucrare Mecanica Prin AschiereDocument322 paginiPicos Volumu I Proiectarea Tehnologiilor de Prelucrare Mecanica Prin Aschiereadict2694% (17)
- Boltul PistonuluiDocument10 paginiBoltul Pistonuluiradoo9Încă nu există evaluări
- Proiect CCA AmbreiajDocument23 paginiProiect CCA Ambreiajradoo9Încă nu există evaluări